Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к способу и системе, предназначенным для управления информацией об изображении и, в частности, к способу и системе, предназначенным для предоставления информации, связанной с изображением, пользователю, и к подвижному терминалу, предназначенному для этого.
Уровень техники
При современной популяризации подвижных терминалов пользователи могут иметь различные услуги, такие как услуга информации о дорожном движении, предназначенная для предоставления информации о состоянии дорог едущему пользователю через экран подвижного терминала, услуга “мой звонок”, предназначенная для предоставления возможности пользователю регистрировать его/ее собственные уникальные звуки звонка, и мобильная пейджинговая услуга, предназначенная для предоставления текстовой информации, указывающей поступление голосового сообщения в ящик голосовой почты пользователю. Так как подвижные терминалы сконструированы, чтобы поддерживать различные дополнительные услуги, предоставляемые провайдерами услуг, такие как функция ящика голосовой почты и функция приема специальной информации, пользователей подвижных терминалов обеспечивают различными удобствами помимо традиционной функции вызова телефона.
Так как различные услуги и дополнительные функции становятся рядовыми, система мобильной связи предоставляет не только услуги передачи речи и данных, но также мультимедийную услугу класса цифровой сети с комплексными услугами (ISDN), поддерживающую скорость данных, равную нескольким Мбит/с. В последнее время разработаны терминалы, подходящие для систем мобильной связи. Например, подвижный терминал с модулем фотокамеры (фото-видеокамеры), имеющей функцию, допускающую фотографирование объекта и запоминание сфотографированного изображения, стал коммерчески доступным.
Подвижные терминалы становятся более широко распространенными и включают в себя функции, такие как функция фотокамеры, пользователи могут удобно делать фотоснимки в любое время и в любом месте с использованием подвижных терминалов. Кроме того, так как подвижные терминалы снабжены фотокамерой, которая может удобно переноситься пользователями, пользователи могут делать фотоснимки в случае чрезвычайного положения, а также могут делать фотоснимки в любое время, когда необходимо.
Терминалы с модулем фотокамеры включают в себя различные способы. Для того чтобы увеличить полезность и эффективность подвижных терминалов, имеющих модуль фотокамеры, и чтобы удовлетворить различные требования пользователей, необходимо применить вышеуказанные различные услуги и дополнительные функции к подвижным терминалам, имеющим модуль фотокамеры. Например, можно реализовать функцию оптического распознавания символов (OCR), которая может распознавать символы, такие как номера телефонов и данные, напечатанные в документе, с использованием модуля фотокамеры, включенного в подвижные терминалы.
Сущность изобретения
Техническая проблема
Несмотря на то что модуль фотокамеры, включенный в подвижные терминалы, имеет различных пользователей, использование модуля фотокамеры было ограничено функцией OCR.
Техническое решение
Вследствие этого задачей настоящего изобретения является предоставление способа и системы, предназначенных для предоставления информации, связанной с изображением, пользователю, и подвижный терминал, предназначенный для этого.
В соответствии с одним аспектом настоящего изобретения предоставлен подвижный терминал, предназначенный для предоставления информации, связанной с изображением, пользователю. Подвижный терминал включает в себя модуль фотокамеры, предназначенный для фотографирования изображения; базу данных, предназначенную для запоминания изображения, образа или символа изображения и информации, связанной с образом или символом изображения; и контроллер, предназначенный для распознавания образа или символа изображения из изображения, сфотографированного с использованием модуля фотокамеры, поиска в базе данных информации, связанной с образом или символом изображения, и предоставления найденной информации пользователю.
В соответствии с другим аспектом настоящего изобретения предоставлен способ, предназначенный для предоставления информации, связанной с изображением, пользователю в системе, включающей в себя подвижный терминал и информационный сервер, причем способ включает в себя этапы, на которых подвижный терминал фотографирует конкретное изображение с использованием подвижного терминала, распознает образ или символ изображения из сфотографированного изображения и передает распознанный результат в информационный сервер. Информационный терминал ищет в распознанном результате информацию, связанную с распознанным образом или символом изображения, и передает найденную информацию в подвижный терминал. Подвижный терминал отображает найденную информацию, предоставленную из информационного сервера.
Выгодные эффекты
Как можно понять из приведенного выше описания, используют модуль фотокамеры, включенный в подвижный терминал, таким образом, расширяют применение модуля фотокамеры и предлагают удобство пользователю. Кроме того, так как подвижный терминал ищет информацию, связанную с изображением, захваченным с использованием модуля фотокамеры, пользователь может получать требуемую информацию просто с помощью фотографирования изображения.
Краткое описание чертежей
Вышеупомянутые и другие задачи, признаки и преимущества настоящего изобретения станут более понятными из следующего подробного описания при взятии совместно с сопровождающими чертежами, на которых:
фиг.1 - схема, иллюстрирующая конфигурацию системы, включающей в себя подвижный терминал, предназначенный для предоставления информации, связанной с изображением, в соответствии с вариантом осуществления настоящего изобретения;
фиг.2 - блок-схема, иллюстрирующая структуру подвижного терминала в соответствии с вариантом осуществления настоящего изобретения;
фиг.3 - блок-схема последовательности этапов, иллюстрирующая поток сообщений между подвижным терминалом и информационным сервером в соответствии с вариантом осуществления настоящего изобретения;
фиг.4 - блок-схема последовательности этапов, иллюстрирующая поток сообщений между подвижным терминалом и информационным сервером в соответствии с другим вариантом осуществления настоящего изобретения;
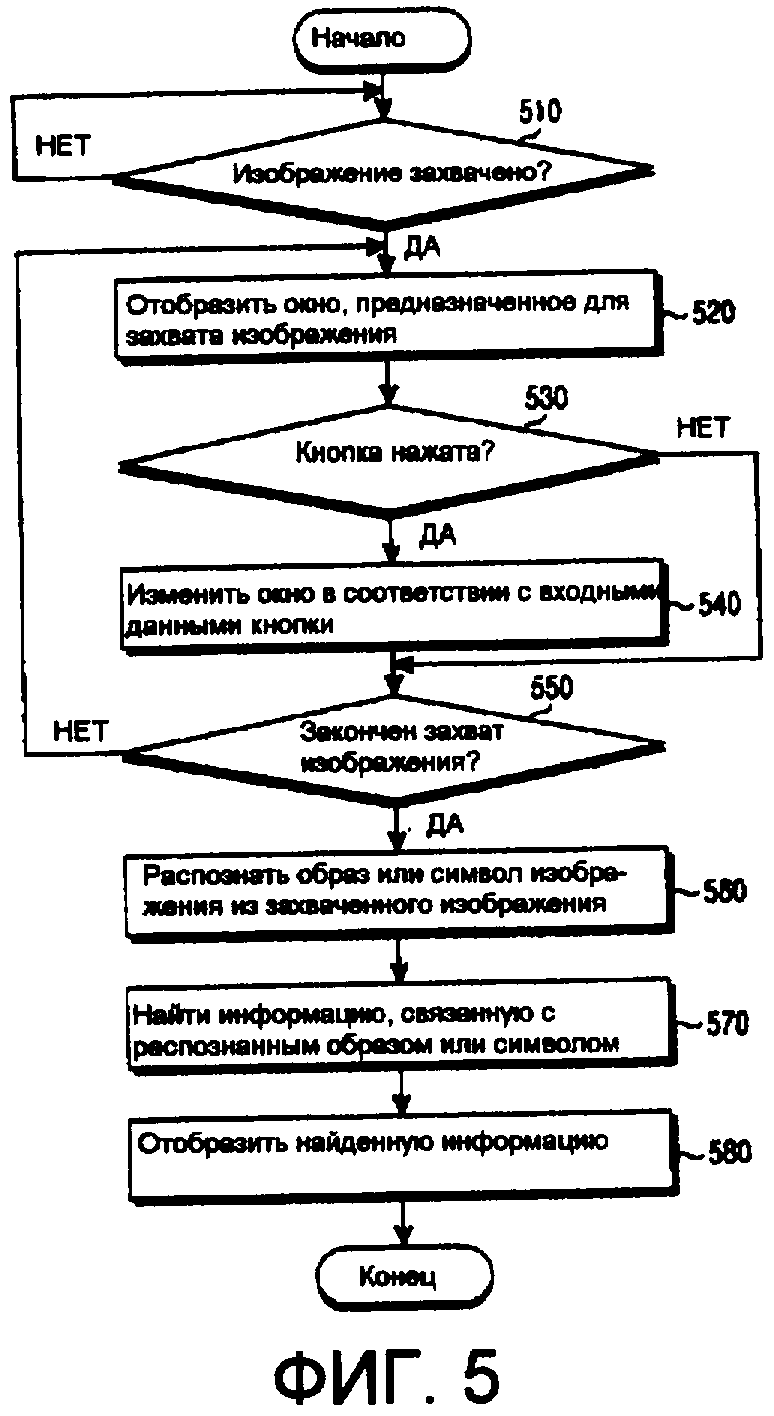
фиг.5 - блок-схема последовательности этапов, иллюстрирующая операцию предоставления информации, связанной с захваченным изображением, в подвижном терминале в соответствии с вариантом осуществления настоящего изобретения;
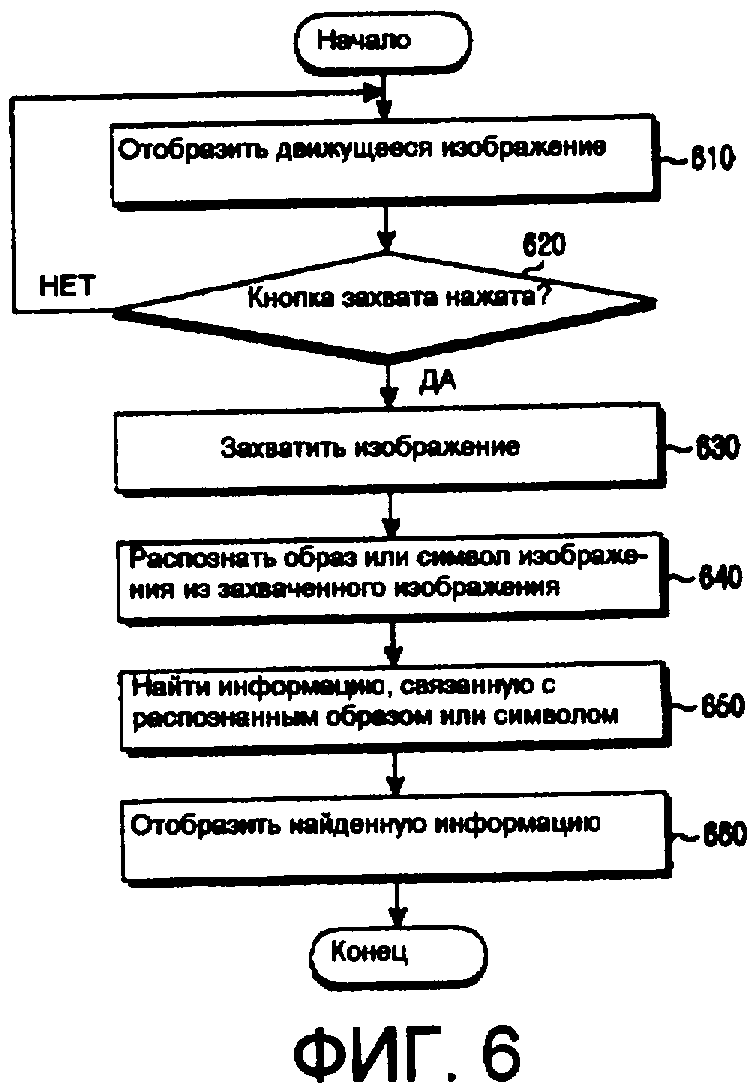
фиг.6 - блок-схема последовательности этапов, иллюстрирующая операцию захвата одной сцены движущегося изображения и получения информации, связанной с захваченным изображением, в подвижном терминале в соответствии с вариантом осуществления настоящего изобретения;
фиг.7 - блок-схема последовательности этапов, иллюстрирующая операцию получения информации, связанной с двумя или более целями распознавания образов, если имеются, в соответствии с вариантом осуществления настоящего изобретения.
Наилучший способ выполнения изобретения
Несколько примерных вариантов осуществления настоящего изобретения теперь будут описаны подробно со ссылкой на прилагаемые чертежи. На чертежах одинаковые или подобные элементы обозначены одинаковыми ссылочными номерами, даже если они изображены на разных чертежах. В следующем описании подробное описание известных функций и конфигураций, включенных в настоящее описание, опущено для ясности и краткости.
Подвижный терминал в соответствии с настоящим изобретением работает с возможностью получения информации, связанной с изображением, сфотографированным посредством модуля фотокамеры, включенного в подвижный терминал. То есть подвижный терминал внутри себя ищет информацию, связанную с изображением, сфотографированным посредством своего модуля фотокамеры, или передает запрос информации в информационный сервер через Internet или беспроводную сеть. Сфотографированное изображение может включать в себя изображения с контурами здания, вывеской магазина, номерным знаком автобуса и т.д.
Подвижный терминал может либо непосредственно передать сфотографированное изображение в информационный сервер, либо может распознать образы или символы изображения из сфотографированного изображения, а затем передать результат распознавания в информационный сервер. Изображение, сфотографированное посредством модуля фотокамеры, может быть частично захвачено пользователем. То есть подвижный терминал дает возможность пользователю захватывать только определенную (например, выбранную) область изображения, сфотографированного посредством фотокамеры. В этом случае информация только относительно захваченной области сфотографированного изображения может быть передана в информационный сервер.
После приема сфотографированного изображения из подвижного терминала информационный сервер распознает образы или символы изображения из принятого сфотографированного изображения и ищет информацию, связанную с образами или символами изображения. В качестве альтернативы, после приема образов или символов изображения из подвижного терминала информационный сервер ищет информацию, связанную с образами или символами принятого изображения. Если информационный сервер передаст найденную информацию в подвижный терминал, подвижный терминал отображает принятую информацию для пользователя. В качестве альтернативы, подвижный терминал распознает образы или символы изображения из сфотографированного изображения, ищет в базе данных информацию, связанную с образами или символами изображения, и предоставляет найденную информацию пользователю. Также в этом случае изображение, сфотографированное посредством фотокамеры, может быть частично захвачено пользователем.
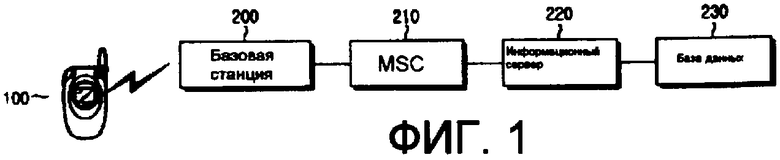
Фиг.1 - схема, иллюстрирующая конфигурацию системы, включающей в себя подвижный терминал, предназначенный для предоставления информации, связанной с изображением, в соответствии с настоящим изобретением.
Ссылаясь на фиг.1, подвижный терминал 100 беспроводным способом взаимодействует с базовой станцией 200. Базовая станция 200 беспроводным способом соединяется с подвижным терминалом 100, расположенным в области своей ячейки, и предоставляет услугу мобильной связи в подвижный терминал 100. Базовая станция 200 соединена с центром 210 коммутации мобильной связи (MSC). Центр 210 коммутации мобильной связи, соединенный с базовой станцией 200, выполняет функцию коммутации соединения вызова, предназначенную для обработки запроса окончания/инициирования вызова в подвижный терминал, и выполняет операцию межсетевого взаимодействия с другим центром коммутации мобильной связи. Кроме того, центр 210 коммутации мобильной связи соединен с информационным сервером 220, чтобы осуществлять межсетевое взаимодействие с подвижным терминалом 100.
Подвижный терминал 100 может передавать изображение, сфотографированное посредством своего модуля фотокамеры, в информационный сервер 220 через базовую станцию 200 и центр 210 коммутации мобильной связи. В качестве альтернативы, подвижный терминал 100 может распознать образы или символы изображения из изображения, сфотографированного посредством своего модуля фотокамеры, и передать результат распознавания в информационный сервер 220. После приема сфотографированного изображения из подвижного терминала 100 информационный сервер 220 распознает образы или символы изображения из сфотографированного изображения и ищет информацию, связанную с образами или символами изображения. В качестве альтернативы, после приема образов или символов изображения из подвижного терминала 100 информационный сервер 220 ищет информацию, связанную с образами или символами принятого изображения. С этой целью информационный сервер 220 включает в себя базу 230 данных, предназначенную для запоминания изображений, образов или символов изображения и информации, связанной с образами или символами изображения, предоставленной из подвижного терминала. Например, база 230 данных может запоминать изображение конкретного здания или вывески и данные глобальной системы позиционирования (GPS), связанные с их местоположением. Кроме того, база 230 данных запоминает другую информацию, такую как номерные знаки автобусов, которые могут включать в себя информации о маршруте/времени.
В этом случае, если подвижный терминал 100 передаст сфотографированное изображение конкретного здания (зданий) в информационный сервер 220, информационный сервер 220 может найти в базе данных сфотографированное изображение и передать связанные с ним запомненные данные GPS в подвижный терминал 100. Данные GPS могут включать в себя карту и маршрут из текущего места к соответствующему зданию/вывеске. В качестве альтернативы, информационный сервер 220 может распознавать образы или символы изображения из захваченного изображения и искать информацию, связанную с распознанными образами или символами изображения. Например, если изображение городского пейзажа, моста и/или отдельного здания сфотографировано с помощью подвижного терминала, в базе данных может быть выполнен поиск, чтобы идентифицировать сфотографированный городской пейзаж, мост или здание и возвратить информацию, такую как город Нью-Йорк, Бруклинский мост и/или Empire State Building. Кроме того, другие данные, такие как местоположение и/или направления для объектов в сфотографированном изображении, могут быть отображены пользователю.
Кроме того, подвижный терминал 100 может захватить номерной знак автобуса, а затем считать номерной знак с использованием технологии OCR. Если подвижный терминал 100 передаст номер автобуса в информационный сервер 220, информационный сервер 220 может передать информацию о маршруте/времени для соответствующего номера автобуса, найденного из базы 230 данных, в подвижный терминал 100. Если информационный сервер 220 передаст найденную информацию в подвижный терминал 100, подвижный терминал отображает принятую информацию для пользователя.
В качестве альтернативы, без информационного сервера подвижный терминал 100 может распознавать образы или символы изображения из изображения, сфотографированного с использованием модуля фотокамеры, искать в собственной базе данных информацию, связанную с образами или символами изображения, и предоставлять информацию пользователю.
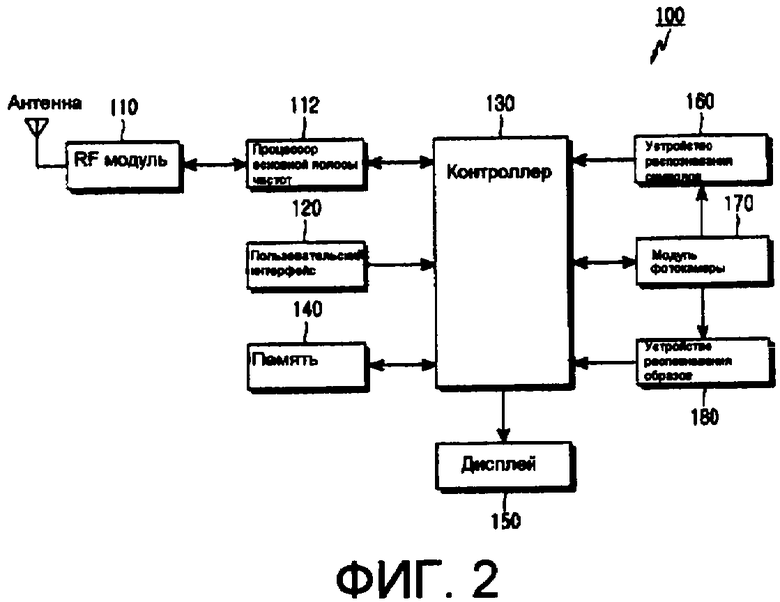
Блок-схема подвижного терминала теперь будет описана со ссылкой на фиг. 2, на которой подвижный терминал 100 включает в себя радиочастотный (RF) модуль 110, процессор 112 основной полосы частот, пользовательский интерфейс 120, контроллер 130, память 140, дисплей 150, устройство 160 распознавания символов, модуль 170 фотокамеры и устройство 180 распознавания образов.
Контроллер 130 управляет общей работой подвижного терминала и управляет каждой частью подвижного терминала, чтобы фотографировать конкретное изображение и предоставлять связанную с ним информацию в соответствии с вариантом осуществления настоящего изобретения.
Работа контроллера 130 теперь будет описана более подробно. В соответствии с вариантом осуществления контроллер 130 может передавать изображение, сфотографированное посредством модуля 170 фотокамеры, в информационный сервер 220.
В соответствии с другим вариантом осуществления контроллер 130 может распознавать образы или символы изображения, сфотографированного посредством модуля 170 фотокамеры, и передавать результат распознавания в информационный сервер 220. В этом случае контроллер 130 распознает образы изображения из сфотографированного изображения с использованием устройства 180 распознавания образов. Кроме того, контроллер 130 распознает символы из сфотографированного изображения с использованием устройства 160 распознавания символов. Контроллер 130 передает распознанные образы или символы изображения в информационный сервер 220 через RF модуль. Когда контроллер 130 не может распознать образы или символы изображения, полученные из сфотографированного изображения, он не может передать сфотографированное изображение в информационный сервер 220.
В соответствии с дополнительным другим вариантом осуществления без информационного сервера контроллер 130 может распознавать образы или символы изображения из изображения, сфотографированного посредством модуля 170 фотокамеры, искать в своей памяти 140 информацию, связанную с изображением, и предоставлять информацию пользователю.
Необязательно контроллер 130 может захватывать только предварительно определенную часть изображения, сфотографированного посредством модуля 170 фотокамеры, для пользователя. С этой целью, когда были сфотографированы несколько целей распознавания образов, например, когда имеются три номерных знака автобусов, контроллер 130 предоставляет информацию пользователю таким образом, чтобы пользователь мог выбрать требуемую цель. Если пользователь выберет конкретную область сфотографированного изображения в зависимости от предоставленной информации, контроллер 130 захватывает выбранную конкретную область и передает только область захвата полного изображения в информационный сервер 220. Кроме того, когда пользователь желает получить информацию, связанную со сценой отображаемого движущегося изображения, контроллер 130 дает возможность пользователю получить изображение желаемой сцены с помощью нажатия кнопки захвата. С этой целью контроллер 130 определяет, введена ли кнопка захвата, в то время как отображается движущееся изображение, и, если кнопка захвата нажата, контроллер 130 захватывает изображение в этот момент. После этого контроллер 130 распознает образы или символы изображения из захваченного изображения.
Контроллер 130 может либо искать в базе данных, например в памяти 140, информацию, связанную с распознанными образами или символами изображения, либо передать запрос информации в информационный сервер 220, чтобы получить соответствующую информацию.
RF модуль 110 обменивается RF сигналами с базовой станцией через антенну ANT. RF модуль 110 преобразует принятый RF сигнал в сигнал промежуточной частоты (IF) и выводит сигнал в процессор 112 основной полосы частот. Кроме того, RF модуль 110 преобразует сигнал IF, принятый из процессора 112 основной полосы частот, в RF сигнал до передачи. Процессор 112 основной полосы частот (например, аналоговая специализированная микросхема (ASIC) основной полосы частот (ВАА), предназначенная для обеспечения интерфейса между контроллером 130 и RF модулем 110), преобразует цифровой сигнал основной полосы частот, предоставленный из контроллера 130, в сигнал IF и выводит IF сигнал в RF модуль 110, преобразует аналоговый сигнал IF, предоставленный из RF модуля 110, в цифровой сигнал основной полосы частот и выводит цифровой сигнал основной полосы частот в контроллер 130.
Пользовательский интерфейс 120 включает в себя множество цифровых кнопок и функциональных кнопок и выводит входные данные кнопок, соответствующие кнопке, нажатой пользователем, в контроллер 130. Память 140 включает в себя память, предназначенную только для чтения (ROM), предназначенную для запоминания множества прикладных программ, и память прямого доступа (RAM), предназначенную для запоминания информации, необходимой для управления работой подвижного терминала 100, и голосовую память, предназначенную для запоминания голосовой информации. Кроме того, память 140 может включать в себя данные, предназначенные для запоминания изображений, образов или символов изображений, и информации, связанной с образом или символом изображения. Кроме того, память может запоминать данные, предназначенные для распознавания образа или распознавания символа изображения. Обычно дисплей 150 включает в себя жидкокристаллический дисплей (LCD) и отображает движущиеся изображения, а также различные сообщения и пиктограммы под управлением контроллера 130.
Теперь будет сделано описание потока сообщений между подвижным терминалом и информационным сервером.
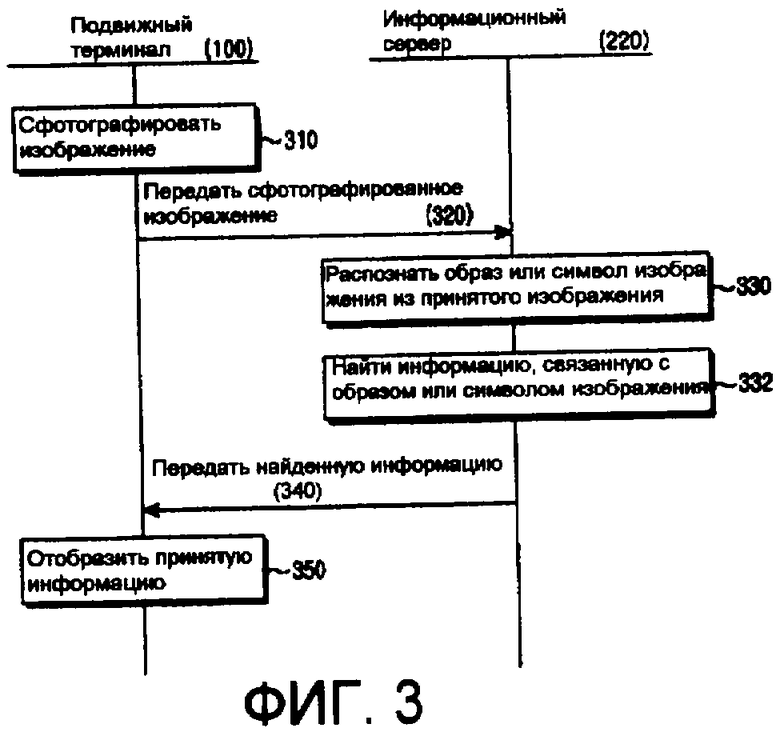
Фиг.3 - схема, иллюстрирующая поток сообщений между подвижным терминалом и информационным сервером в соответствии с настоящим изобретением. Подвижный терминал 100 фотографирует конкретное изображение на этапе 310 и передает сфотографированное изображение в информационный сервер 220 на этапе 320. Информационный сервер 220 распознает образы или символы изображения из принятого изображения на этапе 330 и ищет информацию, связанную с образами или символами изображения, на этапе 332. Как описано выше, информационный сервер 220 включает в себя базу 230 данных, предназначенную для запоминания изображений, образов или символов изображений и информации, связанной с образом или символом изображения, предоставленной из подвижного терминала 100, и ищет в базе 230 данных информацию, связанную с изображением. Информационный сервер 220 передает найденную информацию в подвижный терминал 100 на этапе 340. Подвижный терминал 100 отображает принятую информацию для пользователя на этапе 350.
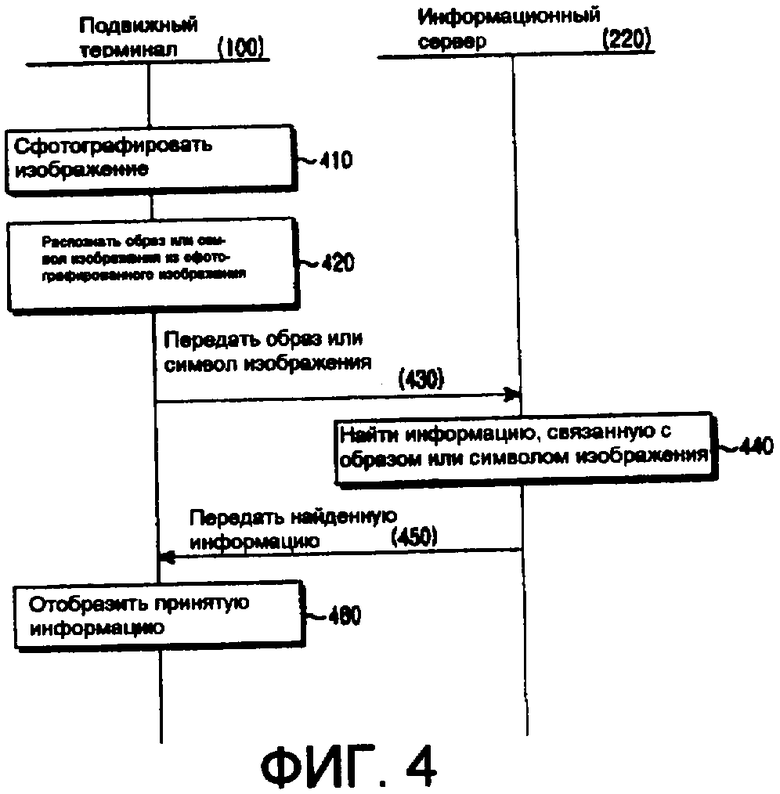
Фиг.4 - схема, иллюстрирующая поток сообщений между подвижным терминалом и информационным сервером 220 в соответствии с настоящим изобретением. Подвижный терминал 100 фотографирует конкретное изображение на этапе 410 и распознает образы или символы изображения из сфотографированного изображения на этапе 420. Подвижный терминал 100 передает образы или символы изображения в информационный сервер 220 на этапе 430. Например, после фотографирования номерного знака конкретного автобуса подвижный терминал 100 может считать номер автобуса из номерного знака с использованием технологии оптического распознавания символов (OCR). В этом случае подвижный терминал 100 передает номер автобуса в информационный сервер 220. Если контроллер 130 не может распознать образы или символы изображения, полученные из сфотографированного изображения, контроллер 130 может передать сфотографированное изображение целиком в информационный сервер 220.
На этапе 440 информационный сервер 220 ищет в базе 230 данных информацию, связанную с образами или символами переданного изображения. На этапе 450 информационный сервер 220 передает найденную информацию в подвижный терминал 100. Как описано выше, если подвижный терминал 100 передаст номер автобуса в информационный сервер 220, информационный сервер 220 может найти в базе 230 данных информацию о маршруте/времени для соответствующего номера автобуса и передать информацию о маршруте/времени в подвижный терминал 100 на этапе 450. На этапе 460 подвижный терминал 100 отображает информацию, переданную из информационного сервера 220, на дисплее 150.
В предыдущих вариантах осуществления подвижный терминал 100 осуществляет доступ в информационный сервер 220, чтобы получить информацию, связанную со сфотографированным изображением. Однако без информационного сервера 220 подвижный терминал 100 может осуществлять поиск в своей собственной базе данных информации, связанной с изображением, сфотографированным с использованием модуля 170 фотокамеры, и предоставлять найденную информацию пользователю.
Фиг.5 - блок-схема последовательности этапов, иллюстрирующая операцию предоставления информации, связанной со сфотографированным изображением, в подвижный терминал в соответствии с настоящим изобретением. Контроллер 130 подвижного терминала 100 определяет на этапе 510, выбрана ли пользователем функция захвата. В соответствии с этим вариантом осуществления пользователь может захватить желаемую часть сфотографированного изображения. Если пользователем выбрана функция захвата, контроллер 130 переходит на этап 520, на котором он отображает окно, предназначенное для захвата изображения, на дисплее 150. Окно захвата предоставляют для захвата только части полного изображения, сфотографированного посредством модуля 170 фотокамеры. Например, контроллер 130 может отображать предварительно определенное прямоугольное окно на полном изображении, сфотографированном посредством модуля 170 фотокамеры. Размер и/или позиция окна захвата могут быть изменены пользователем. Контроллер 130 определяет на этапе 530, имеются ли данные какой-либо кнопки, предназначенные для изменения размера и/или позиции окна захвата. Если имеются данные кнопки, предназначенные для изменения размера и/или позиции окна захвата, контроллер 130 переходит на этап 540, на котором он изменяет окно захвата в соответствии с соответствующими данными кнопки. После этого контроллер 130 определяет на этапе 550, закончен ли захват изображения. Если пользователь вводит клавишу окончания захвата изображения или если окно захвата не изменилось в течение предварительно определенного времени, контроллер 130 может обнаружить окончание захвата изображения. Если захват изображения закончен, контроллер 130 переходит на этап 560, на котором он распознает образ или символ изображения из захваченного изображения. После этого на этапе 570 контроллер 130 ищет, например, в базе данных, реализованной в памяти 140, информацию, связанную с распознанным образом или символом изображения. Как описано выше, в соответствии с этим вариантом осуществления подвижный терминал 100 может включать в себя базу данных, предназначенную для запоминания изображений, образов или символов изображений и информации, связанной с образами или символами изображения. На этапе 580 контроллер 130 отображает найденную информацию на дисплее 150.
Несмотря на то, что этот вариант осуществления захватывает часть сфотографированного изображения, другой вариант осуществления может выбирать цель распознавания образов в отображенном сфотографированном изображении. Специалисты в данной области техники поймут, что последний вариант осуществления может быть просто реализован посредством небольшой модификации предыдущего варианта осуществления. В этом случае полное сфотографированное изображение запоминают в подвижном терминале, и только часть области цели распознавания образов передают в сервер передачи файла. В качестве альтернативы, подвижный терминал может искать связанную информацию с помощью выполнения распознавания образов только относительно области цели распознавания образов.
В соответствии с другим вариантом осуществления настоящего изобретения подвижный терминал может захватывать одну сцену отображенного движущегося изображения. Операция захвата одной сцены движущегося изображения и получения информации, связанной с захваченным изображением, теперь будет описана со ссылкой на фиг.6.
Ссылаясь на фиг.6, контроллер 130 отображает движущееся изображение на этапе 610. В этом случае контроллер 130 может отображать либо движущееся изображение, принятое в реальном времени, либо запомненное воспроизводимое движущееся изображение. Во время отображения движущегося изображения контроллер 130 определяет на этапе 620, введена ли кнопка захвата. Если пользователь желает получить информацию, связанную с соответствующей сценой отображаемого движущегося изображения, пользователь может получить желаемую сцену с помощью нажатия кнопки захвата. Если пользователь нажмет клавишу захвата, контроллер 130 переходит на этап 630, на котором контроллер захватывает изображение, отображенное в момент времени, когда нажата клавиша захвата. После этого на этапе 640 контроллер 130 распознает образ или символ изображения из захваченного изображения.
На этапе 650 контроллер 130 ищет, например, в базе данных, реализованной в памяти 140, информацию, связанную с распознанным образом или символом изображения. В качестве альтернативы, контроллер 130 может получить информацию, связанную с образом или символом изображения, распознанными на этапе 640, с помощью передачи запроса информации в информационный сервер 220. На этапе 660 контроллер 130 отображает информацию, связанную с полученным образом или символом захваченного изображения.
В соответствии с еще одним вариантом осуществления настоящего изобретения подвижный терминал сконструирован таким образом, что, когда имеется несколько целей распознавания образов в сфотографированном изображении, он может выбрать две или более цели распознавания образов и получить информацию, связанную с ними. Со ссылкой на фиг.7 теперь будет сделано описание операции получения информации, связанной с двумя или более целями распознавания образов, когда имеются несколько целей распознавания образов.
Ссылаясь на фиг.7, контроллер 130 фотографирует конкретное изображение на этапе 710 и распознает образ или символ изображения из сфотографированного изображения на этапе 720. Контроллер 130 определяет на этапе 730, больше ли или равно 2 число распознанных образов или символов изображения. Например, несколько целей распознавания образов, таких как номерные знаки автобусов, могут быть включены в одно изображение. Если имеется только одна цель распознавания образов в сфотографированном изображении, контроллер 130 переходит на этап 760.
Однако, если сфотографированное изображение включает в себя несколько целей распознавания образов, контроллер 130 переходит на этап 740, на котором он отображает две или более целей распознавания образов. То есть контроллер 130 отображает несколько целей распознавания образов для пользователя и запрашивает пользователя, чтобы выбрать одну из них. Контроллер 130 последовательно отображает цели распознавания образов на дисплее 150, и пользователь может выбрать желаемую цель распознавания образов с помощью перемещения курсора и выбора соответствующего номера. На этапе 750 контроллер 130 определяет, выбрана ли пользователем какая-либо цель распознавания образов. Если цель распознавания образов выбрана пользователем, контроллер 130 переходит на этап 760, на котором он передает соответствующий распознанный образ или символ изображения в информационный сервер 130.
Контроллер 130 принимает информацию, связанную с соответствующим образом или символом изображения, из информационного сервера на этапе 770 и отображает информацию на этапе 780. В этом варианте осуществления подвижный терминал 100 обнаруживает наличие целей распознавания образов. Однако в альтернативном варианте осуществления информационный сервер 220 может обнаружить наличие нескольких целей распознавания образов в сфотографированном изображении и запросить подвижный терминал 100, какую цель распознавания образов он выберет.
Несмотря на то, что изобретение изображено и описано со ссылкой на определенный вариант его осуществления, специалисты в данной области техники поймут, что различные изменения по форме и в деталях могут быть сделаны в нем, не выходя за рамки сущности и объема изобретения, как определено с помощью прилагаемой формулы изобретения.
Изобретение относится к технике связи. Раскрыт подвижный терминал (ПТ), предназначенный для получения информации, связанной с изображением, сфотографированным посредством модуля фотокамеры ПТ. ПТ захватывает желаемое изображение в сфотографированном изображении и либо ищет внутри себя информацию, связанную с захваченным изображением, либо передает запрос информации в информационный сервер через Интернет или беспроводную сеть. После приема захваченного изображения из подвижного терминала информационный сервер распознает образ или символ изображения из захваченного изображения и ищет информацию, связанную с образом или символом изображения. Информационный сервер передает найденную информацию в ПТ, и ПТ отображает принятую информацию для пользователя. Технический результат - расширение арсенала технических средств. 4 н. и 1 з.п. ф-лы, 7 ил.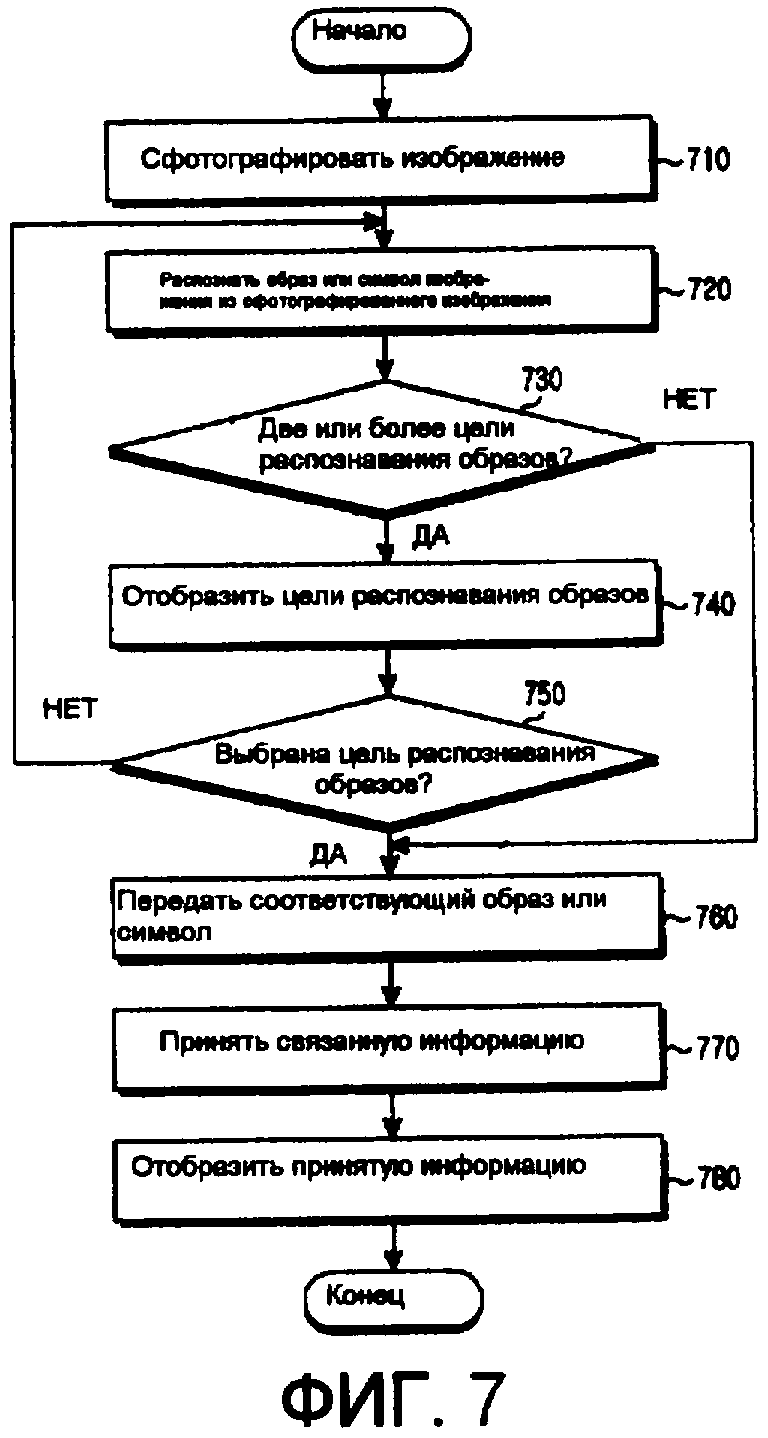
1. Система для предоставления информации, связанной с изображением, пользователю, содержащая
подвижный терминал для фотографирования изображения, распознавания целей распознавания образа из сфотографированного изображения, отображения целей распознавания образа, передачи одной из целей распознавания образа, выбранной пользователем, в информационный сервер; и
информационный сервер для распознавания образа изображения из выбранной цели распознавания образа, поиска информации, связанной с распознанным образом изображения, и передачи найденной информации в подвижный терминал;
причем подвижный терминал принимает найденную информацию, предоставленную из информационного сервера, и отображает принятую информацию.
2. Подвижный терминал для предоставления информации, связанной с изображением, пользователю, содержащий
модуль фотокамеры для фотографирования изображения;
базу данных для запоминания изображения, образа изображения и информации, связанной с образом изображения; и
контроллер для распознавания целей распознавания образа из сфотографированного изображения, отображения целей распознавания образа, распознавания образа изображения из одной из целей распознавания образа, выбранной пользователем, поиска в базе данных информации, связанной с образом изображения, и предоставления найденной информации пользователю.
3. Подвижный терминал по п.2, в котором контроллер отображает окно захвата, предназначенное для захвата части изображения, и изменяет размер и/или позицию окна захвата в соответствии с входными данными клавиши от пользователя.
4. Способ предоставления информации, связанной с изображением, пользователю в системе, включающей в себя подвижный терминал и информационный сервер, содержащий этапы, на которых фотографируют с помощью подвижного терминала изображение, распознают цели распознавания образа из сфотографированного изображения, отображают цели распознавания образа, передают одну из целей распознавания образа, выбранную пользователем, в информационный сервер; и
распознают с помощью информационного сервера образ изображения из выбранной цели распознавания образа, ищут информацию, связанную с распознанным образом изображения принятой цели распознавания образа, и передают найденную информацию в подвижный терминал; и отображают с помощью подвижного терминала найденную информацию, предоставленную из информационного сервера.
5. Подвижный терминал для предоставления информации, связанной с изображением, пользователю, содержащий
дисплей для отображения движущегося изображения;
базу данных для запоминания изображения, образа изображения и информации, связанной с образом изображения; и
контроллер для захвата из движущегося изображения изображения, отображенного в момент времени, когда нажата кнопка захвата, если кнопка захвата нажата пользователем во время отображения движущегося изображения, распознавания целей распознавания образа из захваченного изображения, отображения целей распознавания образа, распознавания образа изображения из одной из целей распознавания образа, выбранной пользователем, поиска в базе данных информации, связанной с образом изображения, и предоставления найденной информации пользователю.
| US 2004208372 A1, 21.10.2004 | |||
| US 2003044086 A1, 06.03.2003 | |||
| RU 2003104828 A, 10.06.2004 | |||
| DE 10336320 A1, 03.03.2005 | |||
| ДЭВИД ФОРСАЙТ, ЖАН ПОНС, Компьютерное зрение | |||
| Современный подход | |||
| - М.: Издательский дом Вильямс, 2004, с.727-730. |

