Область техники
Настоящее изобретение относится к устройству и способу управления потоком мощности в трехфазной линии электропередачи.
Уровень техники
Известны различные виды устройств как для статического, так и для динамического управления потоком мощности в подобной линии электропередачи. Целью управления может быть статическое распределение мощности между линиями электроснабжения или энергосетями, а также подавление колебаний мощности в линии электропередачи.
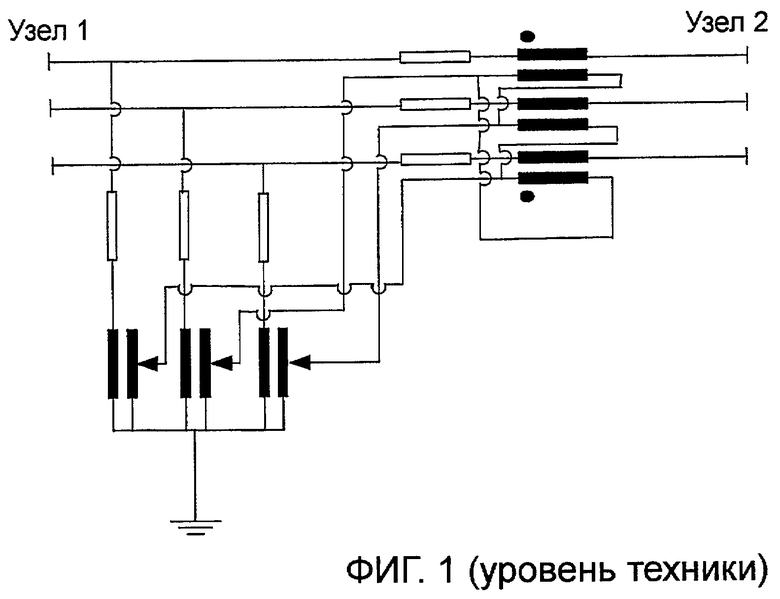
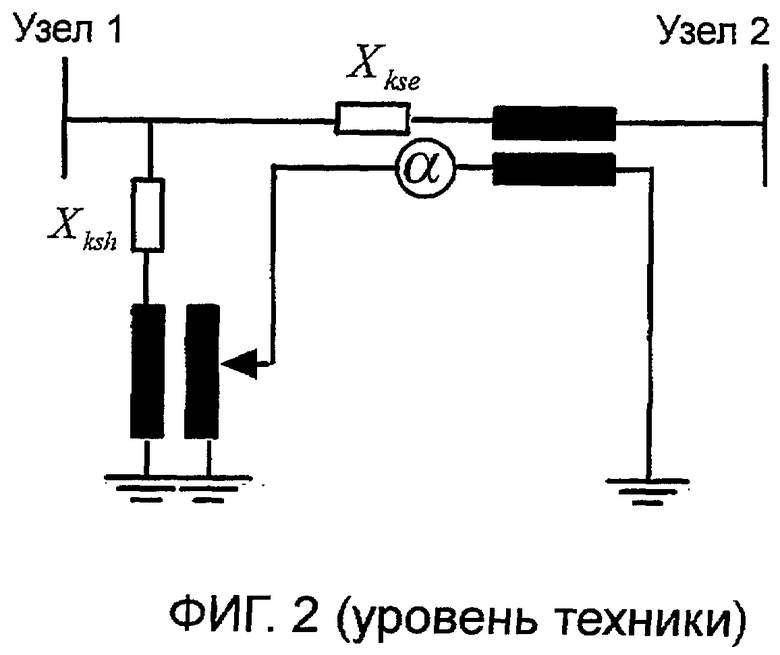
Известно использование фазосдвигающего трансформатора (ФСТ) для управления потоком мощности в линии электропередачи переменного тока, т.е. в трехфазной линии переменного тока, которая соединяет между собой две электрические энергосети и передает активную мощность между указанными энергосетями. Существует несколько различных известных конструктивных решений для фазосдвигающих трансформаторов. На фиг.1 показана принципиальная схема цепи, соответствующей одному такому известному конструктивному решению, обычно называемому квадратурным вольтодобавочным трансформатором, которое было описано в патенте США №6737837 В1. Основными частями этого устройства являются трансформатор напряжения с обмоткой возбуждения и регулировочной обмоткой, последовательный трансформатор с вольтодобавочной обмоткой и последовательной обмоткой, и переключатель отводов трансформатора под нагрузкой, с помощью которого можно регулировать фазовый сдвиг, вносимый фазосдвигающим трансформатором. Сетевое напряжение в узле 1 прикладывается к обмотке возбуждения трансформатора напряжения и наводится в регулировочной обмотке в соответствии с отношением числа витков. С помощью переключателя отводов под нагрузкой можно извлечь часть напряжения регулировочной обмотки и подать его на вольтодобавочную обмотку последовательного трансформатора. Напряжение, приложенное к вольтодобавочной обмотке, затем наводится в последовательной обмотке в соответствии с отношением числа витков. Комбинация соединенной звездой регулировочной обмотки и соединенной треугольником вольтодобавочной обмотки вносит 90-градусный фазовый сдвиг напряжения, которое в результате дает индуцированное последовательное напряжение в последовательной обмотке, которое сдвинуто по фазе на 90 градусов относительно напряжения в узле 1. На фиг.2 показана упрощенная схема цепи с прямой последовательностью того же квадратурного вольтодобавочного трансформатора, который изображен на фиг.1, причем 90-градусный фазовый сдвиг символически обозначен как α=ejβ, при  .
.
Регулируя амплитуду напряжения в последовательной обмотке с помощью переключателя отводов, управляют фазовым сдвигом между напряжениями в узле 1 и в узле 2. Регулируя фазовый сдвиг между напряжениями в узле 1 и в узле 2, можно управлять распределением потока мощности между линией, в которой установлен ФСТ, с одной стороны, и параллельными линиями в электрической энергосистеме, с другой стороны.
Полезной является способность фазосдвигающих трансформаторов блокировать паразитный поток мощности, обусловленный различием фазовых углов в питающей сети. Мощность может быть доставлена потребителю заданным образом, и можно избежать циркулирующих потоков мощности.
Однако использование ФСТ обеспечивает малую скорость управления. Переключатель отводов должен проходить через каждое положение переключателя последовательно. На каждое переключение уходит порядка 3-5 секунд. Таким образом, ФСТ не может решающим образом выполнять свои функции на протяжении переходного периода, следующего за возмущением в сети. Кроме того, частое переключение отводов, в особенности при наличии большого тока, увеличивает потребность в техническом обслуживании.
Переключатель отводов является механическим устройством, и по этой причине является медленным и подвержен механическому изнашиванию. Максимальный регулируемый диапазон напряжения для него составляет 150 кВ, а максимальное число шагов переключения составляет менее 35. Максимальное переключаемое напряжение между двумя положениями переключателя отводов составляет порядка 4000-5000 В, а максимальный номинальный проходящий ток составляет порядка 3000-4500 А. Максимальная обслуживаемая мощность составляет 6000-8000 кВА на отвод; также имеется тепловой предел по короткому замыканию. Шаги с меньшим изменением напряжения приводят к увеличению числа механических операций.
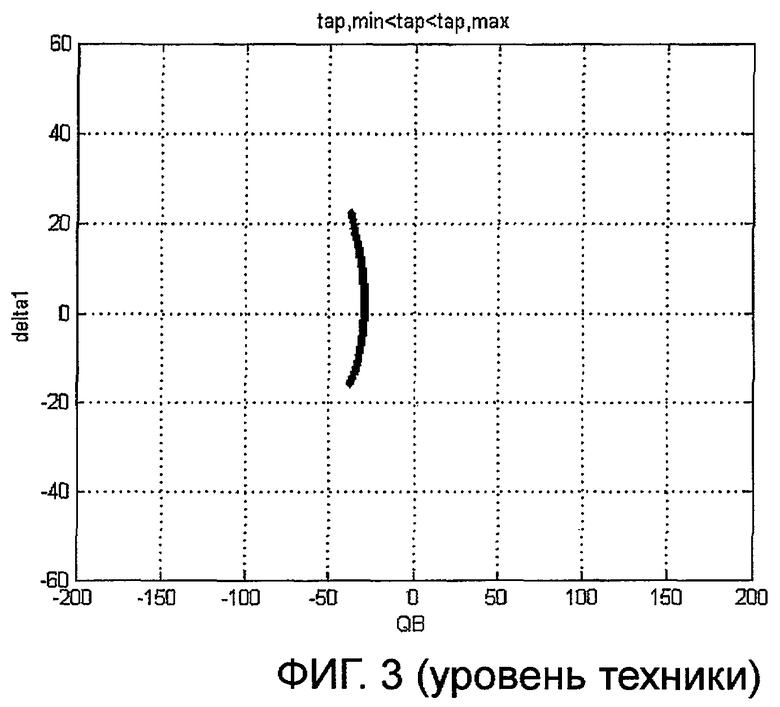
Кроме того, ФСТ потребляет реактивную мощность из-за его реактивных сопротивлений короткого замыкания. На фиг.3 показан диапазон управления в терминах эффективного фазового сдвига и баланса реактивной мощности для заданного проходящего тока, где баланс реактивной мощности для ФСТ отложен по оси x, а фазовый сдвиг - по оси y. Потребление реактивной мощности увеличивается квадратично с увеличением тока в линии и, таким образом, заметно проявляется при большой нагрузке энергосистемы.
Раскрытие изобретения
Целью настоящего изобретения является создание устройства и способа описанного во введении типа, которые по сравнению с известными решениями уровня техники позволяют устранить отмеченные выше недостатки.
Изобретение основано на понимании того, что между блоком последовательных трансформаторов и блоком трансформаторов напряжения можно предусмотреть блок управляемых реактивных сопротивлений с тем, чтобы одновременно обеспечивать как управление потоком мощности, так и управление поддержанием напряжения.
Согласно изобретению, предлагается устройство для управления потоком мощности в трехфазной линии передачи переменного тока, содержащее блок последовательных трансформаторов, содержащий для каждой из фаз линии электропередачи последовательный трансформатор с первичной обмоткой и вторичной обмоткой, причем вторичная обмотка выполнена с возможностью последовательного подключения в соответствующую фазу линии электропередачи, и блок трансформаторов напряжения, содержащий для каждой из фаз линии электропередачи трансформатор напряжения с первичной обмоткой и вторичной обмоткой, причем первичная обмотка выполнена с возможностью подключения между линией электропередачи и землей, при этом устройство отличается наличием блока реактивных сопротивлений, включающего в себя для каждой из фаз линии электропередачи первое управляемое реактивное сопротивление и второе управляемое реактивное сопротивление, последовательно подключенные между вторичной обмоткой трансформаторов напряжения и землей, при этом между первым управляемым реактивным сопротивлением и вторым управляемым реактивным сопротивлением предусмотрены точки подключения, а первичная обмотка последовательного трансформатора каждой из фаз подключена к точкам подключения между управляемыми реактивными сопротивлениями двух других фаз линии электропередачи.
Таким образом, предлагается устройство для управления потоком мощности, которое одновременно обеспечивает как управление потоком мощности, так и управление поддержанием напряжения.
В предпочтительном варианте осуществления изобретения управляемые реактивные сопротивления содержат полупроводниковые приборы, предпочтительно тиристоры, для управления значениями реактивных сопротивлений. Наличие полупроводниковых переключателей обеспечивает возможность быстрого управления в случае, например, возникновения переходных процессов.
В предпочтительном варианте осуществления изобретения каждый из трансформаторов напряжения содержит переключатель отводов, к которому подключено соответствующее управляемое реактивное сопротивление. С помощью переключателей отводов можно изменять общие характеристики устройства управления потоком мощности с целью учета медленных изменений в энергосистеме.
Дальнейшие предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения станут более понятными для специалиста в указанной области из следующего далее подробного описания вместе с прилагаемыми чертежами.
На фиг.1 изображена схема трехфазной цепи известного из уровня техники фазосдвигающего трансформатора типа квадратурного вольтодобавочного трансформатора.
На фиг.2 изображена упрощенная схема цепи для прямой последовательности известного фазосдвигающего трансформатора по фиг.1.
Фиг.3 иллюстрирует диапазон управления для известного фазосдвигающего трансформатора по фиг.1 и фиг.2.
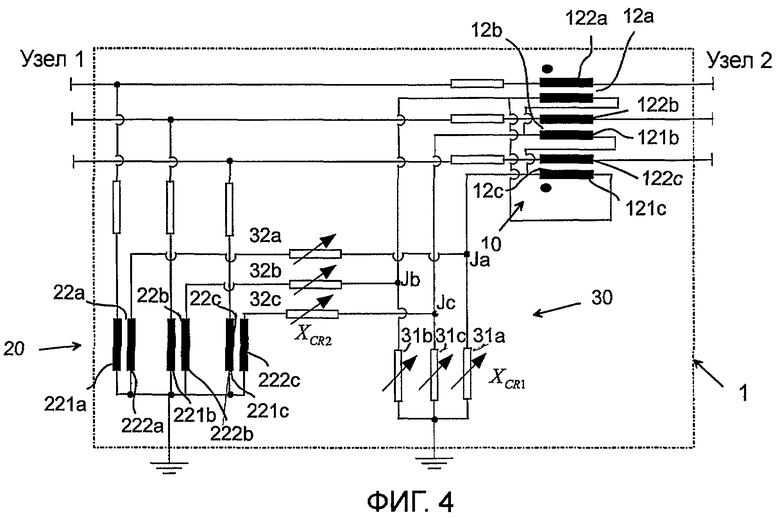
На фиг.4 изображена принципиальная схема трехфазной цепи первого варианта осуществления устройства управления в соответствии с настоящим изобретением.
На фиг.5 изображена упрощенная схема цепи для прямой последовательности устройства управления по фиг.4.
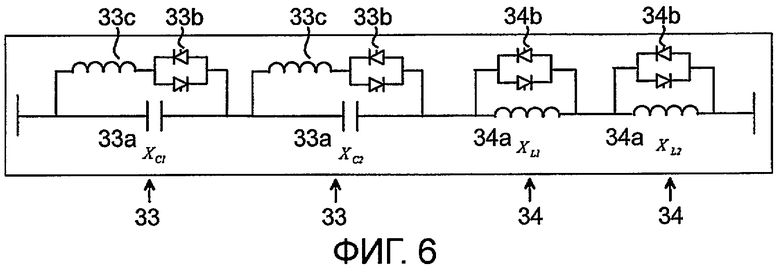
На фиг.6 показана реализация управляемого реактивного сопротивления, входящего в состав устройства управления по фиг.4 и фиг.5.
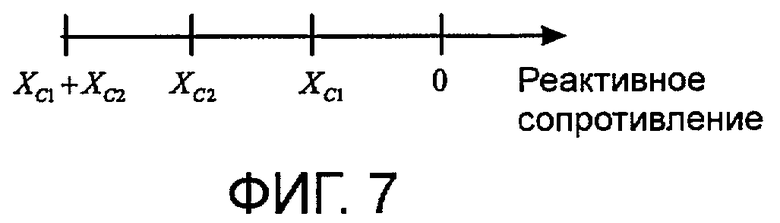
На фиг.7 представлена односторонняя дискретная функция емкости управляемого реактивного сопротивления.
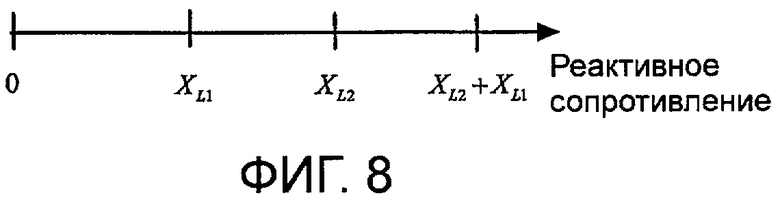
На фиг.8 представлена односторонняя дискретная функция индуктивности управляемого реактивного сопротивления.
На фиг.9 представлена дискретная функция управления управляемого реактивного сопротивления.
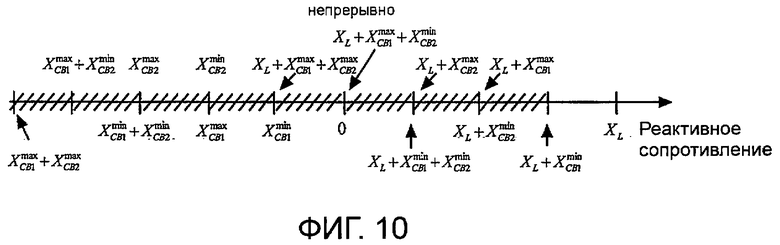
На фиг.10 показана непрерывная функция управления регулируемого реактивного сопротивления.
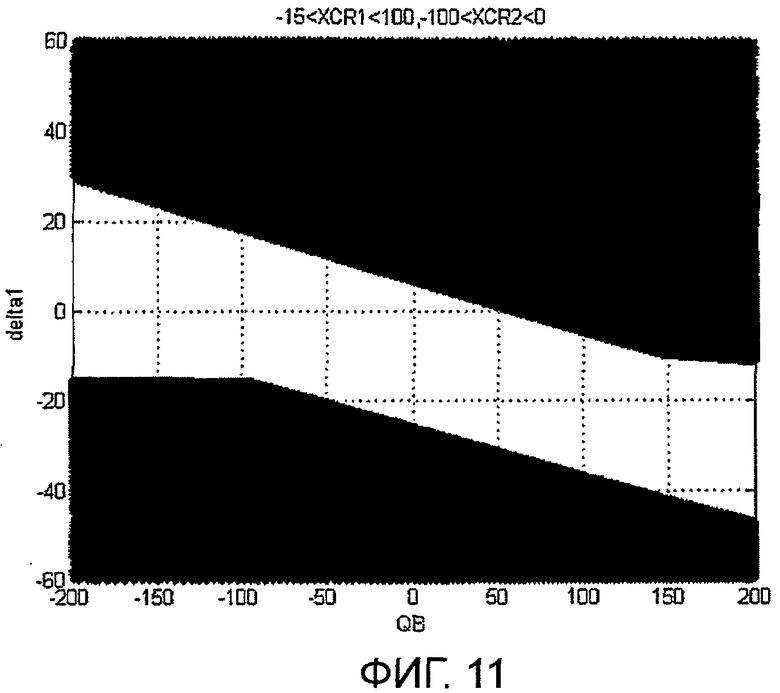
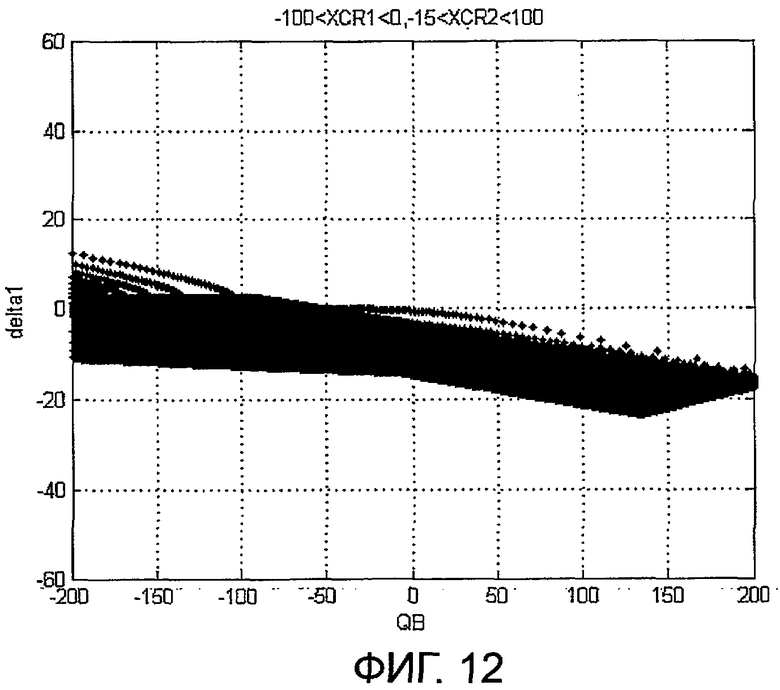
На фиг.11 и 12 показаны части диапазона управления для устройства управления по фиг.4 и 5.
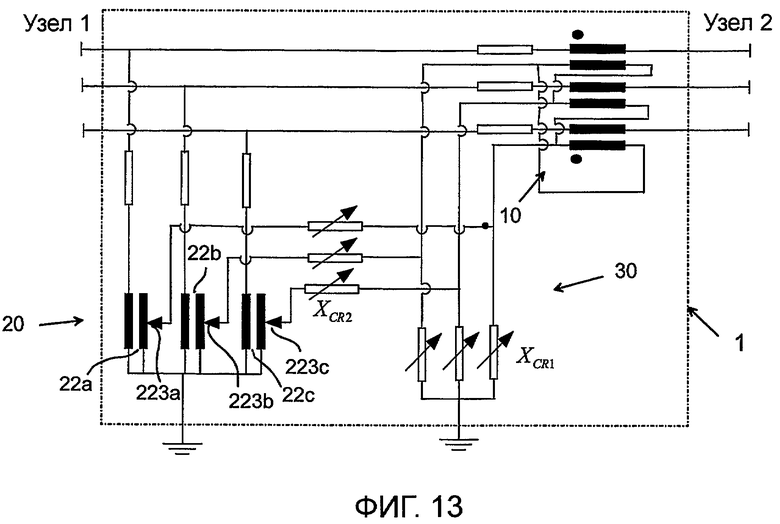
На фиг.13 представлена принципиальная схема трехфазной цепи второго варианта осуществления устройства управления согласно настоящему изобретению.
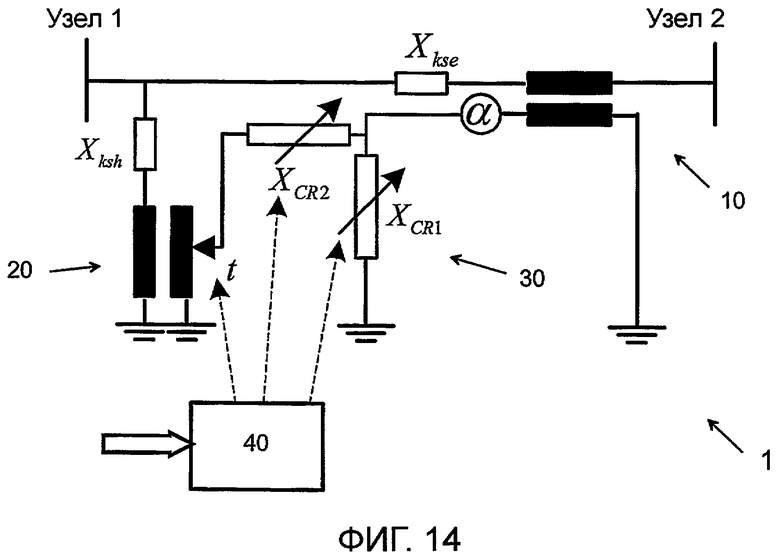
На фиг.14 показана упрощенная схема цепи для прямой последовательности устройства управления по фиг.13.
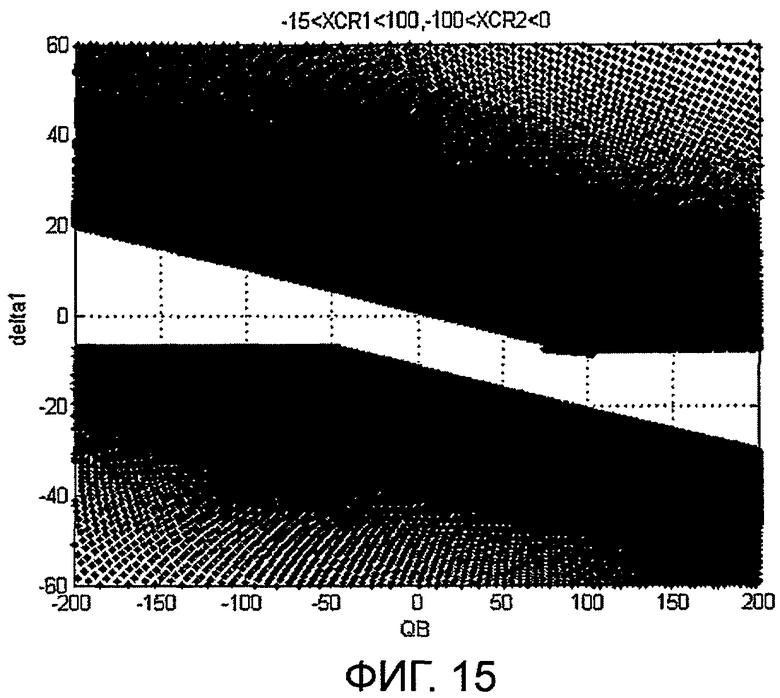
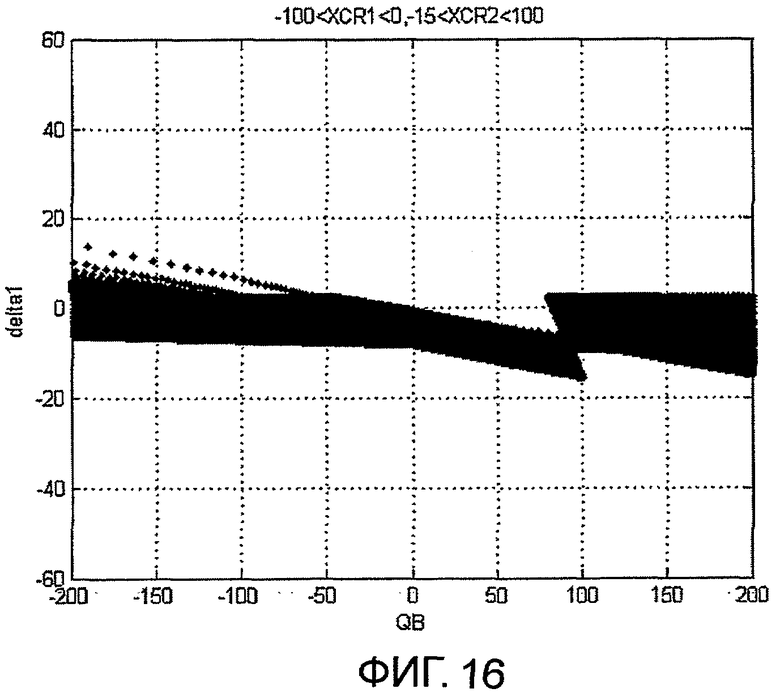
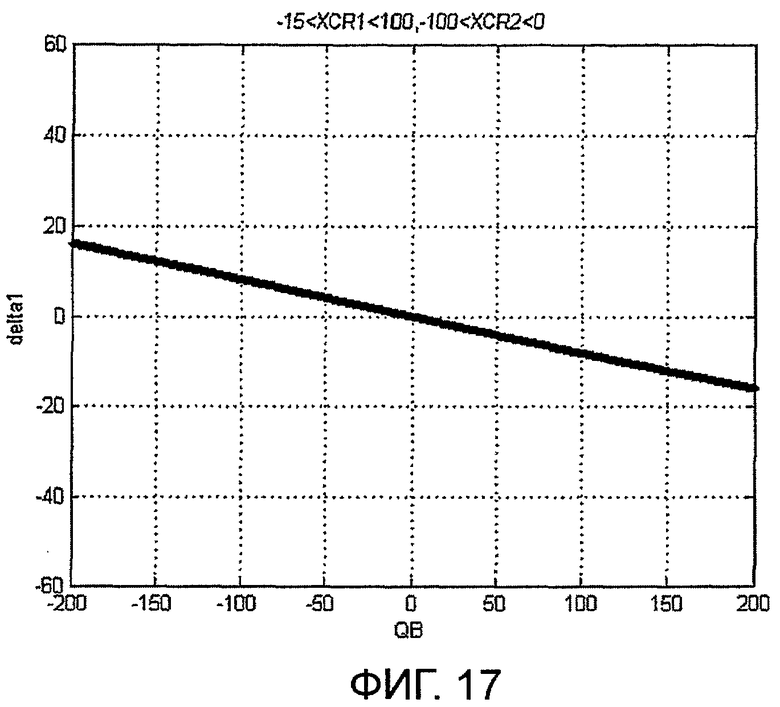
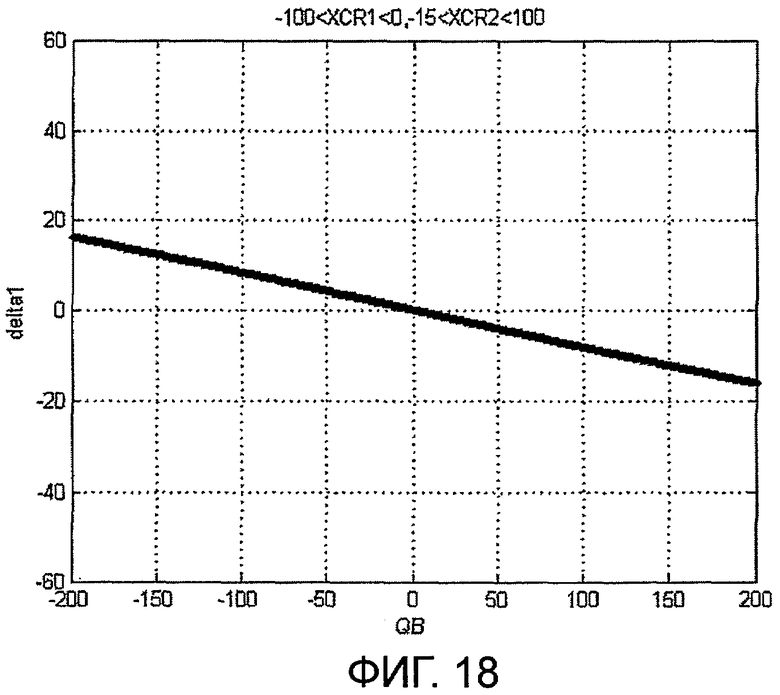
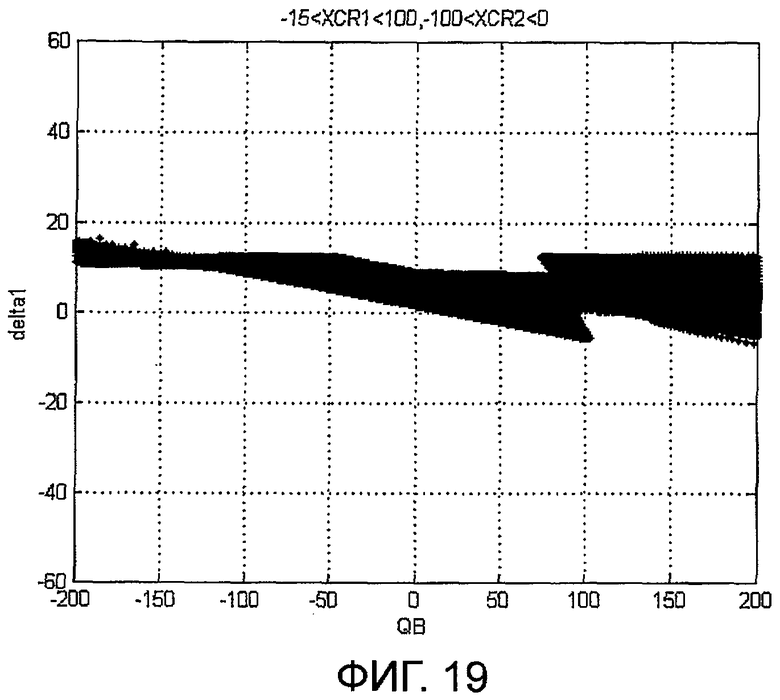
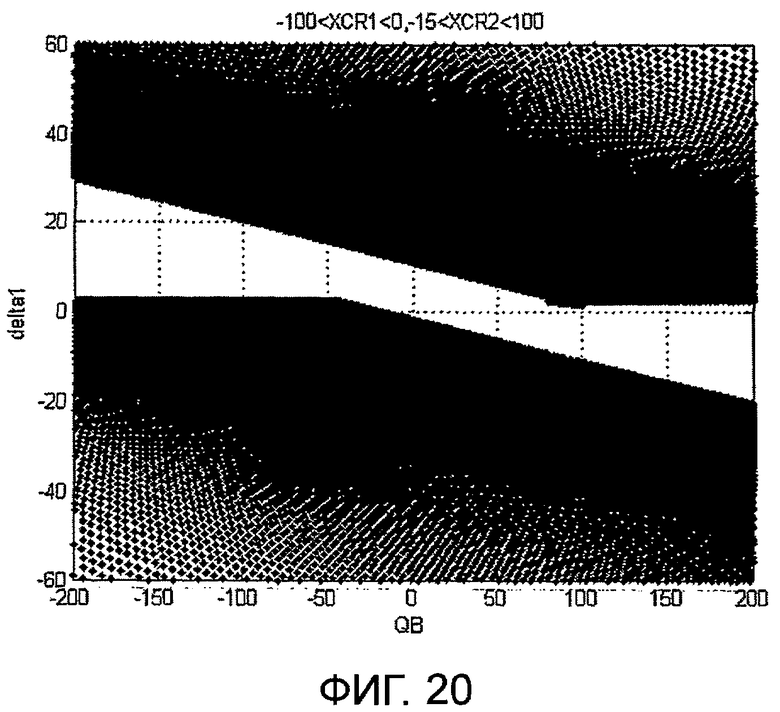
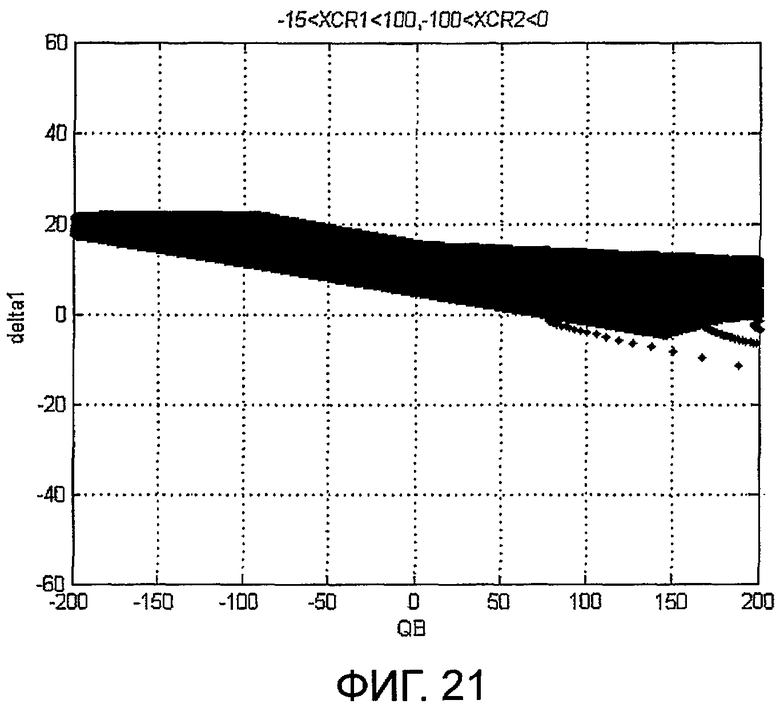
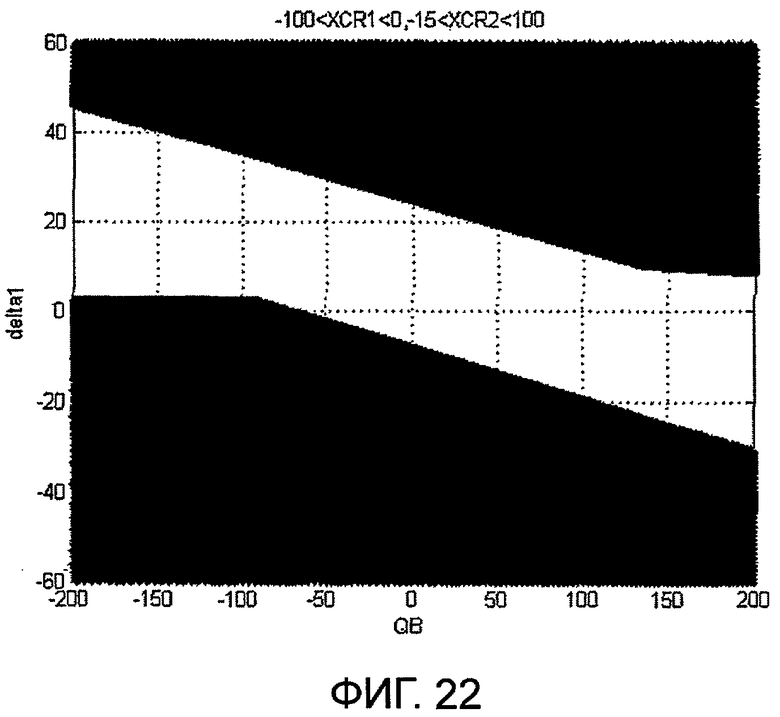
На фиг.15-22 показаны части диапазона управления для управляющего устройства по фиг.13 и 14.
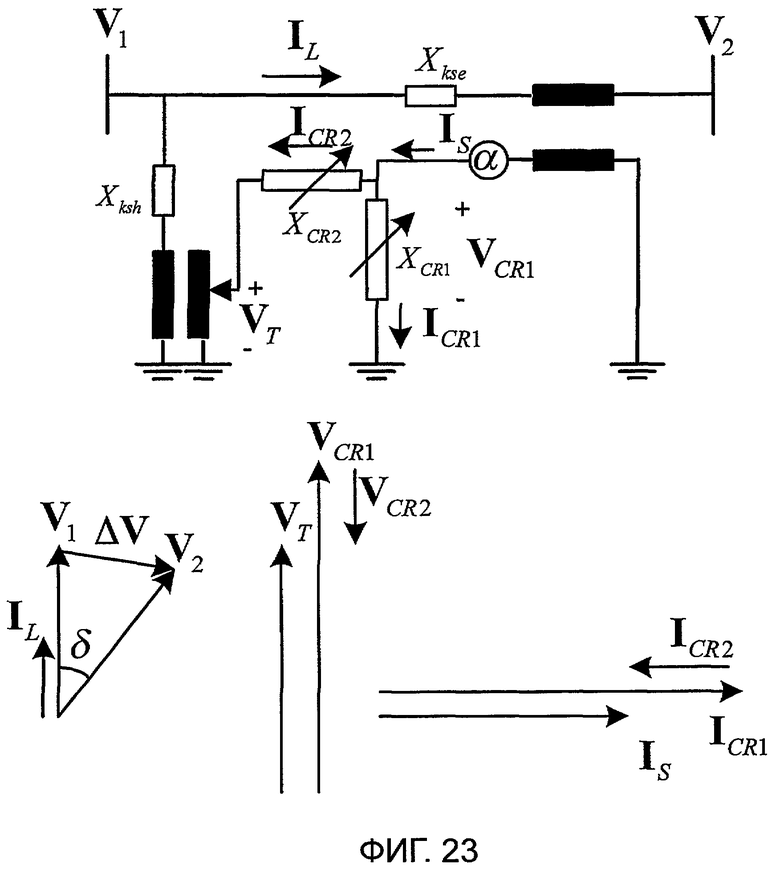
На фиг.23 показана схема цепи для прямой последовательности с фиг.14 вместе с упрощенной векторной диаграммой.
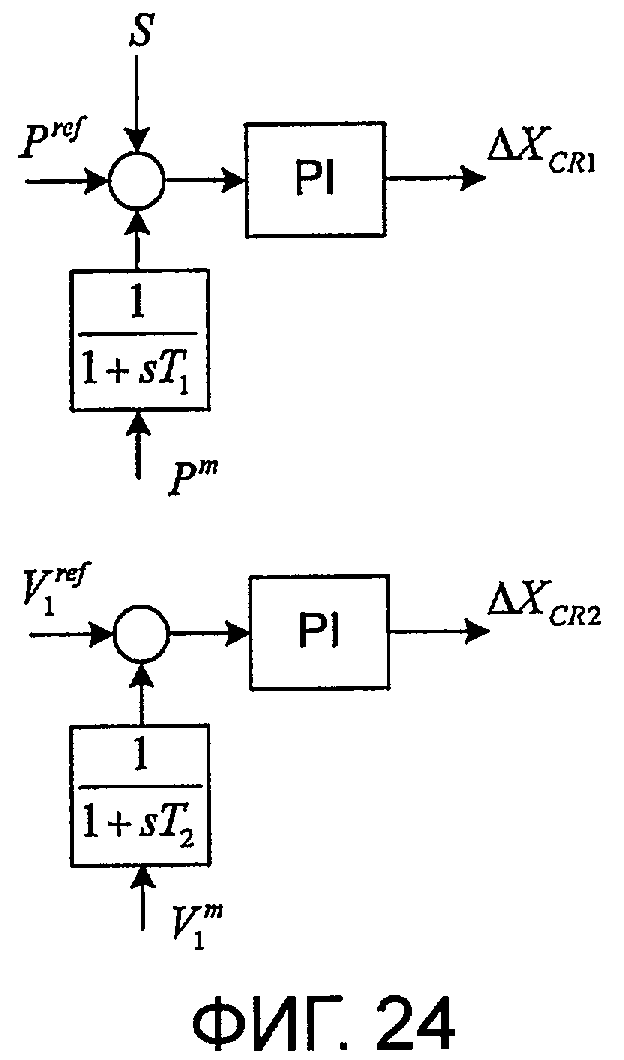
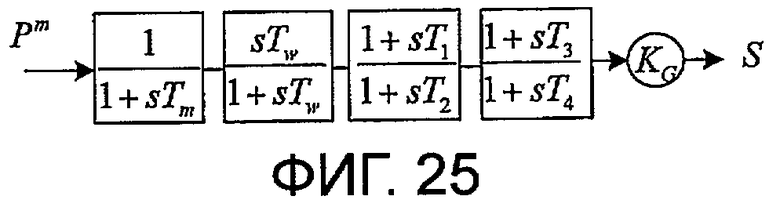
На фиг.24 и 25 показаны схемы управления, используемые с устройством управления согласно настоящему изобретению.
Осуществление изобретения
Далее приводится подробное описание предпочтительных вариантов осуществления настоящего изобретения.
Устройство управления потоком мощности согласно настоящему изобретению, обозначенное в целом как 1, показано на фиг.4 и 5. Устройство содержит блок 10 последовательных трансформаторов, блок 20 трансформаторов напряжения, блок 30 управляемых реактивных сопротивлений, содержащий два управляемых реактивных сопротивления 31 и 32 (XCR1 и XCR2), и блок 40 управления, управляющий значениями реактивных сопротивлений для регулируемых реактивных сопротивлений. Блоки адаптированы для функционирования в трехфазном режиме. Это означает, что блок последовательных трансформаторов содержит три трансформатора 12а-12с, каждый из которых содержит первичную обмотку 121а-121с и вторичную обмотку 122а-122с. Для каждой фазы обеспечена возможность подачи на первичную обмотку напряжения, которое зависит от регулируемой части напряжения между двумя другими фазами линии электропередачи, в то время, как вторичная обмотка выполнена с возможностью последовательного подключения в соответствующую фазу линии электропередачи.
Блок 20 трансформаторов напряжения содержит для каждой из фаз линии передачи трансформатор 22а-22с с первичной обмоткой 221а-221с возбуждения и вторичной регулирующей обмоткой 222а-222с. Первичная обмотка подключена между линией электропередачи и землей, а вторичная обмотка подключена к блоку 30 управляемых реактивных сопротивлений, как будет объяснено ниже.
Блок 30 управляемых реактивных сопротивлений содержит для каждой из фаз линии электропередачи первое управляемое реактивное сопротивление 31а-31с и второе управляемое реактивное сопротивление 32а-32с, последовательно подключенные между вторичной обмоткой трансформаторов напряжения и землей. Между первым и вторым управляемыми реактивными сопротивлениями предусмотрены точки подключения, и первичная обмотка последовательного трансформатора каждой из фаз подключена к точкам подключения между управляемыми реактивными сопротивлениями двух других фаз линии электропередачи.
Управляемые реактивные сопротивления, которые подключены к блоку 40 управления, управляющему значениями реактивных сопротивлений, будут управляться таким образом, что, если первым управляемым реактивным сопротивлением управляют в положительном диапазоне управления (соответствующем положительным значениям XCR1 реактивного сопротивления), то вторым управляемым реактивным сопротивлением управляют в отрицательном диапазоне XCR2 управления и наоборот. Это означает, что первыми управляемыми реактивными сопротивлениями 31а-31с и вторыми управляемыми реактивными сопротивлениями 32а-32с управляют в противоположных диапазонах управления. Будет ли XCR1 управляться в положительном или в отрицательном диапазоне управления, будет зависеть от электрической схемы (т.е. от знака β) устройства, и для переключения между положительным и отрицательным диапазонами управления может быть предусмотрено переключающее устройство (не показано).
Теперь можно использовать две степени свободы в терминах параметров управления для управления как последовательным напряжением, индуцируемым последовательно с линией, так и балансом реактивной мощности устройства. Управляя балансом реактивной мощности, можно, например, управлять напряжением в узле 1. Таким образом, могут быть достигнуты одновременные управление потоком мощности и управление амплитудой напряжения.
На фиг.6 показана общая предпочтительная реализация управляемого реактивного сопротивления XCR, такого как управляемые реактивные сопротивления 31 и 32. XCR состоит в этом случае из двух переключаемых тиристором емкостных реактансных звеньев 33, и двух переключаемых тиристором индуктивных реактансных звеньев 34. Число звеньев может меняться от одного устройства к другому. Управляемое реактивное сопротивление может состоять также только из емкостных звеньев или только из индуктивных звеньев.
Каждое из емкостных звеньев 33 в XCR на фиг.6 содержит емкостной элемент 33а и тиристорный переключатель 33b для подключения и отключения емкостного элемента. В представленном варианте осуществления каждое из емкостных звеньев 33 содержит также индуктивный элемент 33с, соединенный последовательно с тиристорным переключателем 33b и параллельно с емкостным элементом. Индуктивный элемент 33с предназначен только для улучшения характеристик переключения элемента реактивного сопротивления. В варианте по фиг.6 XCR содержит также два индуктивных звена 34, каждое из которых содержит индуктивный элемент 34а и соединенный параллельно тиристорный переключатель 34b для подключения и отключения индуктивного элемента.
Комбинирование произвольного числа емкостных и индуктивных звеньев входит в рамки описываемого изобретения. Таким образом, управляемое последовательное устройство компенсации может содержать множество как емкостных, так и индуктивных цепей.
XCR 31, 32 блока 30 управляемых реактивных сопротивлений может быть реализовано в различных конфигурациях. В первом варианте осуществления, показанном на фиг.7, XCR содержит переключаемые емкостные элементы, с помощью которых можно управлять XCR дискретными шагами. Во втором варианте осуществления, показанном на фиг.8, XCR содержит переключаемые индуктивные элементы, с помощью которых можно управлять XCR дискретными шагами. В третьем варианте осуществления, показанном на фиг.9, XCR содержит комбинацию емкостных и индуктивных элементов и может управляться дискретными шагами. В четвертом варианте осуществления, показанном на фиг.10, XCR содержит множество повышающих емкостных звеньев и множество индуктивных звеньев, что позволяет управлять XCR непрерывным образом.
В первом одностороннем дискретном варианте изобретения XCR содержит только емкостные элементы. Предполагается, что два емкостных звена переключаются тиристорами, и что
XC2=2XC1.
Таким образом, элементы XCR обладают емкостным диапазоном управления, разделенным на дискретные шаги, как показано на фиг.7.
Во втором одностороннем варианте изобретения XCR содержит только индуктивные элементы. Предполагается, что два индуктивных звена переключаются тиристорами и что
XL2=2XL1.
Таким образом, элементы XCR имеют индуктивный диапазон управления, разделенный на дискретные шаги, как показано на фиг.8.
В следующем варианте осуществления изобретения XCR содержит множество как емкостных, так и индуктивных элементов. Возможность дискретного управления можно проиллюстрировать следующим образом. Допустим, что как два емкостных звена, так и индуктивное звено переключаются тиристорами (т.е. не производится повышение, которое порождает гармоники), и что
XC2=2XC1
|XL|=|2XC2|.
Тем самым элементы XCR обладают емкостным и/или индуктивным диапазоном управления, разделенным на дискретные шаги, как показано на фиг.9.
Управляемый непрерывным образом вариант согласно настоящему изобретению можно проиллюстрировать следующим образом (число шагов, разумеется, может быть изменено). В этом варианте осуществления XXR содержит множество индуктивных элементов и множество емкостных элементов, которые допускают управление непрерывным образом. Допустим, что емкостные звенья обладают возможностью повышения так, что являются управляемыми непрерывным образом между
 и
и  ,
,
где
 ,
,  ,
,  ,
,
и что индуктивная часть имеет величину
 .
.
Тогда элементы XCR непрерывно регулируются в диапазоне, показанном на фиг.10.
Разрешающая способность управления устройства согласно настоящему изобретению в этом варианте сделана бесконечной на большом участке диапазона управления.
На фиг.11 и 12 показаны части диапазона регулирования устройства согласно настоящему изобретению в терминах фазового сдвига и баланса реактивной мощности для двух различных диапазонов параметров XCR1 и XCR2 управления. Видно, что может быть получено большинство фазовых сдвигов между -60 и +60 градусами, и что они могут быть получены при различных балансах реактивной мощности. Следует заметить, что динамический отклик в терминах изменения рабочей точки является быстрым по сравнению с классическим ФСТ, поскольку согласно изобретению изменение совершается путем переключения тиристоров.
На фиг.13 и 14 показан вариант осуществления изобретения, идентичный варианту по фиг.4 и 5, за исключением того, что вторая регулирующая обмотка трансформаторов 22а-22с напряжения дополнительно оборудована переключателем 223а-223с отводов, содержащим переключатель полярности (не показано) для медленной подстройки общего диапазона управления.
Очевидно, что в этом варианте диапазон управления, показанный на фиг.11 и 12, может быть получен при положении переключателя отводов в одном из крайних положений (которое можно обозначить как max-tap). Если вместо этого переключатель отводов расположить на половине расстояния до положения max-tap, получается диапазон управления, показанный на фиг.15 и 16. В нейтральном положении получается диапазон управления, показанный на фиг.17 и 18. Если переключатель полярности приводится в действие так, что обеспечивается противоположное действие переключателя отводов, то конечное положение переключателя отводов можно обозначить как min-tap. Если переключатель отводов установлен на половину расстояния до положения min-tap, получается диапазон управления, показанный на фиг.19 и 20. И, наконец, если переключатель отводов поставить в положение min-tap, может быть получен диапазон управления, показанный на фиг.21 и 22.
Таким образом, можно медленно подстраивать динамический рабочий диапазон в терминах как фазового сдвига, так и баланса реактивной мощности.
Под динамическим рабочим диапазоном понимается часть рабочего диапазона, которая может управляться достаточно быстро, чтобы смягчить последствия электромеханических переходных процессов в энергосистеме. Поскольку управляемые тиристорами реактивные сопротивления XCR1 и XCR2 могут легко менять рабочую точку от максимальной емкости до максимальной индуктивности и наоборот за доли секунды, они хорошо подходят для участия, например, в подавлении колебаний мощности, возникающих из-за электромеханических колебаний в синхронных машинах (генераторах). Переключатель отводов, с другой стороны, в котором для каждого шага требуется порядка пяти секунд, и каждый шаг должен быть пройден последовательно, оказывается слишком медленным для активного использования в течение переходного процесса. Другими словами, динамическая часть рабочего диапазона устройства соответствует рабочему диапазону управляемых реактивных сопротивлений.
Вместе с тем, управляя переключателем отводов в ситуации, предшествующей возмущению, можно изменять общие характеристики управляющего устройства.
Основные задачи управления, т.е. основные причины для установки устройства управления согласно настоящему изобретению, сводятся к одной или нескольким из следующих задач:
- медленное/квазистационарное управление потоком мощности;
- быстрое динамическое управление потоком мощности;
- быстрое динамическое поддержание напряжения;
- подавление колебаний мощности.
Под медленным/квазистационарным управлением потоком мощности понимается медленное управление распределением мощности между линией передачи, в которой установлено устройство согласно настоящему изобретению, с одной стороны, и параллельными линиями передачи, с другой стороны. Управление потоком мощности в основном достигается за счет управления эффективным фазовым сдвигом устройства. Требования к скорости управления для решения этой задачи достаточно невысоки, чтобы их можно было удовлетворить как применением ФСТ, так и применением устройства управления согласно настоящему изобретению.
Быстрое динамическое управление потоком мощности представляет собой управление распределением мощности между линией передачи, в которой установлено устройство согласно настоящему изобретению, с одной стороны, и параллельными линиями передачи, с другой стороны, с целью освобождения частей системы и смягчения, таким образом, конкретных проблем стабильности. Быстрое динамическое управление потоком мощности в основном достигается также за счет управления эффективным фазовым сдвигом устройства.
Быстрое динамическое поддержание напряжения достигается за счет быстрого изменения баланса реактивной мощности устройства таким образом, чтобы создавалось достаточная реактивная мощность, так чтобы можно было поддерживать желаемое напряжение. Это существенно в системах, подверженных лавинному снижению напряжения. Аналогично, если напряжение слишком высоко, создание реактивной мощности может быть быстро снижено, или увеличено потребление.
Подавление колебаний мощности представляет собой быстрое управление устройством согласно настоящему изобретению для смягчения колебаний мощности, обычно следующих за возмущением в энергосистеме. Подавление колебаний мощности в основном достигается за счет управления эффективным фазовым сдвигом устройства. Частота этих колебаний обычно лежит в диапазоне 0,1-0,2 Гц и в большой степени зависит от постоянных инерции синхронных машин (обычно генераторов) или групп машин, задействованных в колебаниях. Требование по скорости регулирования для решения этой задачи удовлетворяется за счет тиристорно регулируемых XCR1 и XCR2.
Быстро изменяя рабочую точку XCR1 и XCR2, за долю периода, следующего за возмущением переходного процесса, можно изменить характер передающей сети, где установлено устройство согласно настоящему изобретению. В частности, если установлено несколько устройств, и управление ими скоординировано, возмущенная часть системы, испытывающая, например, проблемы стабильности, может быть быстро освобождена от передачи мощности, тогда как незатронутая часть системы принимает на себя передачу мощности. Благодаря способности перехода между крайними положениями диапазона управления, скажем, менее чем за 0,5 с после возникновения возмущения, показатели функционирования во время переходного процесса всей объединенной системы могут быть, таким образом, существенно улучшены. Переключатель отводов трансформатора оказывается слишком медленным, чтобы действовать в пределах такого промежутка времени, однако его рабочая точка перед возмущением будет влиять на общие характеристики изобретения, а значит и на свойства передающей сети.
Переключатель отводов исходно управляется так, чтобы обеспечить устройство с предпочтительным динамическим диапазоном в свете возможных непредвиденных обстоятельств, которые могут произойти. Поэтому ожидается, что число операций переключения отводов будет достаточно небольшим для данной установки, что снижает требования по техническому обслуживанию переключателя отводов трансформатора.
Реактивная мощность потребляется из-за реактивного сопротивления короткого замыкания для трансформатора напряжения и последовательного трансформатора, которое лишь слегка изменяется в зависимости от положения переключателя отводов, по сравнению с XCR1 и XCR2, реактивные сопротивления которых имеют значительно больший диапазон изменений по своей природе. В результате XCR1 и XCR2 могут создавать и потреблять значительный объем реактивной мощности, в зависимости от того, сколько подключено емкостных или индуктивных звеньев. Возможность одновременно выполнять как управление потоком мощности, так и управление поддержанием напряжения является главным преимуществом. Если, например, энергосистема по какой-то причине оказывается слабой в отношении поддержания напряжения, т.е. напряжения малы, то полезно создавать реактивную мощность или по меньшей мере ограничивать общее потребление реактивной мощности в устройстве. Аналогично, если напряжения высоки, полезно потреблять реактивную мощность или по меньшей мере ограничивать общее создание реактивной мощности устройством.
На фиг.23 показана схема прямой последовательности устройства по фиг.14 вместе с упрощенной векторной диаграммой (векторы электрических величин (фазоры) показаны жирным шрифтом). Эффективный фазовый сдвиг δ между узловыми напряжениями в узле 1 и узле 2 будет зависеть от прилагаемого последовательного напряжения и от падения напряжения на реактивном сопротивлении короткого замыкания последовательного трансформатора. Ток в линии, IL, в большинстве случаев более или менее коллинеарен с узловыми напряжениями (в предположении передачи преимущественно активной мощности). Внутренний ток, поступающий с последовательного трансформатора, IS, сдвинут на угол β (+90 или -90 градусов) относительно тока в линии. Этот ток является суммой токов через XCR1, ICR1, и через XCR2, ICR2. Ток ICR2 затем трансформируется и вводится в систему в узле 1. Напряжение на XCR1, VCR1 пропорционально прилагаемому напряжению, которое, в свою очередь, по существу равно ΔV (в пренебрежении падением напряжения на реактивном сопротивлении короткого замыкания последовательного трансформатора). Другими словами, регулируя величину VCR1, можно управлять фазовым сдвигом δ. Величина напряжения VCR1 равна произведению тока через XCR1 и реактивного сопротивления XCR1. Кроме того, величины токов ICR1 и ICR2 будут зависеть от величины и знака XCR1 и XCR2 для фиксированного напряжения VT (которое управляется переключателем отводов). Теперь баланс реактивной мощности в основном (в пренебрежении, для простоты, вкладами от реактивных сопротивлений короткого замыкания трансформатора) будет равен квадрату тока через XCR1 и XCR2, умноженному на соответствующие реактивные сопротивления. Таким образом, регулируя величину и знак XCR1 и XCR2, можно управлять как фазовым сдвигом, так и балансом реактивной мощности устройства.
Задачи управления, поставленные выше, могут быть реализованы несколькими различными способами. Предпочтительная реализация показана на фиг.24. Схема управления состоит из двух контуров управления, которые могут иметь разные временные характеристики, чтобы избежать нерегулярных колебаний. Верхний контур изменяет активную проходящую мощность Pm и сравнивает ее с опорным значением Pref. Если имеется ошибка управления, будет действовать PI-регулятор, увеличивая или уменьшая XCR1. Другими словами, управление потоком мощности достигается путем управления фазовым сдвигом. Второй контур измеряет величину напряжения в узле 1, V1 m, и сравнивает ее с опорным значением V1 ref. Если имеется ошибка управления, будет действовать PI-регулятор, увеличивая или уменьшая XCR2. Другими словами, управление напряжением достигается путем управления балансом реактивной мощности. Временными характеристиками обеих контуров можно управлять, подбирая соответствующим образом постоянные времени, T1 и T2.
Подавление колебаний мощности может быть обеспечено посредством дополнительного сигнала, S. Этот сигнал может генерироваться, как показано на фиг.25, где первый блок содержит постоянную времени измеряющего устройства, второй блок является фильтрующим блоком, выделяющим колебания мощности, третий и четвертый блоки являются блоками опережения-задержки, которые обеспечивают дополнительный сигнал с правильным фазовым сдвигом относительно колебания мощности, и, наконец, усилитель, который обеспечивает дополнительному сигналу подходящее усиление.
Несмотря на предпочтительность данных вариантов, объем охраны изобретения не должен ограничиваться описанными вариантами, а содержит также варианты, очевидные специалисту в указанной области.
Важно избегать высоких напряжений на XCR1 и XCR2, которые могли бы повредить устройство. Поэтому система управления должна иметь защитные ограничения, реализуемые в системе управления так, чтобы высокие напряжения на этих реактивных сопротивлениях быстро понижались. Кроме того, для дополнительной защиты они должны быть защищены ограничителями перенапряжения.
Здесь были описаны управляемые тиристорами реактивные сопротивления. Следует заметить, что другие виды мощных полупроводниковых приборов также могут использоваться для управления реактивными сопротивлениями.

Использование: в области электротехники. Технический результат заключается в повышении надежности и быстродействия. Устройство (1) для управления потоком мощности в трехфазной линии передачи переменного тока содержит блок (10) последовательных трансформаторов, блок (20) трансформаторов напряжения и блок (30) реактивных сопротивлений, последовательно подключенных между вторичной обмоткой трансформатора напряжения и землей, а первичная обмотка последовательного трансформатора каждой из фаз подключена к определенным точкам подключения между управляемыми реактивными сопротивлениями двух других фаз линии электропередачи. 2 н. и 8 з.п. ф-лы, 25 ил.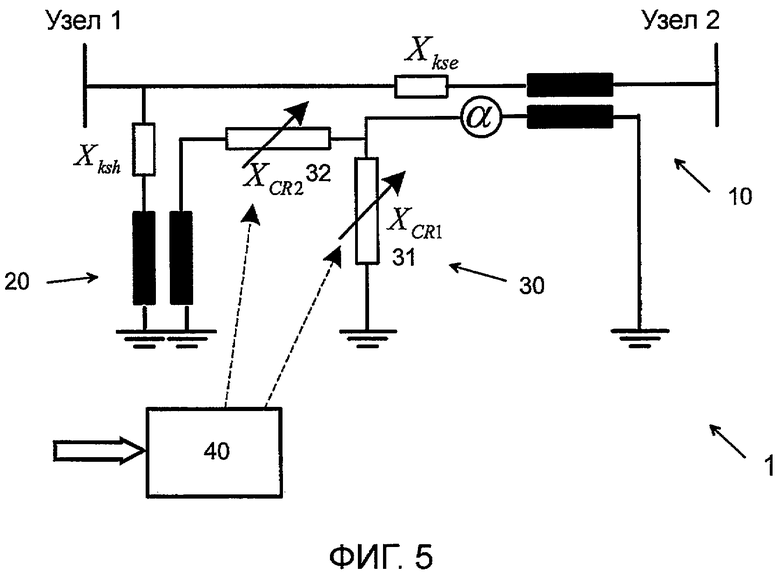
1. Устройство (1) для управления потоком мощности в трехфазной линии электропередачи переменного тока, содержащее блок (10) последовательных трансформаторов, который содержит для каждой из фаз линии электропередачи последовательный трансформатор (12а-12с) с первичной обмоткой (121а-121с) и вторичной обмоткой (122а-122с), причем вторичная обмотка выполнена с возможностью последовательного подключения в соответствующую фазу линии электропередачи; и блок (20) трансформаторов напряжения, который содержит для каждой из фаз линии электропередачи трансформатор (22а-22с) напряжения с первичной обмоткой (221а-221с) и вторичной обмоткой (222а-222с), причем первичная обмотка выполнена с возможностью подключения между линией электропередачи и землей, отличающееся тем, что содержит блок (30) реактивных сопротивлений, включающий в себя для каждой из фаз линии электропередачи первое управляемое реактивное сопротивление (31а-31с) и второе управляемое реактивное сопротивление (32а-32с), последовательно подключенные между вторичной обмоткой трансформаторов напряжения и землей, при этом между первым управляемым реактивным сопротивлением и вторым управляемым реактивным сопротивлением предусмотрены точки (Ja, Jb, Jc) подключения, а первичная обмотка последовательного трансформатора каждой из фаз подключена к указанным точкам подключения между управляемыми реактивными сопротивлениями двух других фаз линии электропередачи.
2. Устройство по п.1, отличающееся тем, что управляемые реактивные сопротивления (31а-31с, 32а-32с) содержат полупроводниковые приборы (33b, 34b), предпочтительно тиристоры, для управления значениями реактивных сопротивлений.
3. Устройство по п.1 или 2, отличающееся тем, что каждый из трансформаторов (22а-22с) напряжения содержит переключатель (223а-223с) отводов, к которому подключено соответствующее управляемое реактивное сопротивление (32а-32с).
4. Устройство по п.1 или 2, отличающееся тем, что первые управляемые реактивные сопротивления (31а-31с) и вторые управляемые реактивные сопротивления (32а-32с) имеют противоположные диапазоны управления.
5. Устройство по п.1 или 2, отличающееся тем, что управляемые реактивные сопротивления (31а-31с, 32а-32с) имеют емкостные и/или индуктивные диапазоны управления, которые разделены на дискретные шаги.
6. Устройство по п.1 или 2, отличающееся тем, что управляемые реактивные сопротивления (31а-31с, 32а-32с) имеют емкостные и/или индуктивные диапазоны управления, в которых управление происходит непрерывным образом.
7. Устройство по п.1 или 2, отличающееся тем, что каждое из управляемых реактивных сопротивлений (31а-31с, 32а-32с) содержит емкостные звенья (33), причем каждое емкостное звено содержит индуктивный элемент (33с), соединенный последовательно с полупроводниковым переключателем (33b) и соединенный параллельно с емкостным элементом (33а).
8. Устройство по п.1 или 2, отличающееся тем, что каждое из управляемых реактивных сопротивлений (31а-31с, 32а-32с) содержит индуктивные звенья (34), причем каждое индуктивное звено содержит индуктивный элемент (34а), соединенный параллельно с полупроводниковым переключателем (34b).
9. Способ управления устройством (1), охарактеризованным в п.1, включающий изменение значений реактивного сопротивления для управляемых реактивных сопротивлений (31а-31с, 32а-32с).
10. Способ по п.9, отличающийся тем, что каждый из трансформаторов (22а-22с) напряжения в устройстве (1) содержит переключатель (23а-23с) отводов, к которому подключено соответствующее регулируемое реактивное сопротивление (32а-32с), и дополнительно включает управление переключателем отводов для изменения общих характеристик устройства.
| US 6737837 B1, 18.05.2004 | |||
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ ЭЛЕКТРОПЕРЕДАЧИ | 1992 |
|
RU2025018C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 1992 |
|
RU2035107C1 |
| US 5469044 A, 21.11.1995. | |||

