FIELD: physics.
SUBSTANCE: lens can be used in CCD receivers, for example in robot computer vision systems through direct mounting on the manipulator. The objective lens has four components. The fourth component is glued from a converging lens and a negative meniscus whose concave side faces the object. The second and third components are positive biaspherical separate lenses. The fourth component is a negative separate biaspherical meniscus whose concave side faces the image. Coefficients of each aspherical surface are determined using the equation: 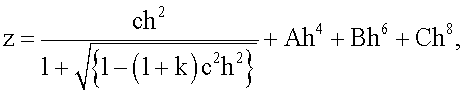 where: z is the arrow of the surface parallel the z axis; c is surface curvature; k is the conical constant of the surface; h is the current coordinate; A, B, C are coefficients of deformation of the 4th, 6th and 8th order, respectively.
where: z is the arrow of the surface parallel the z axis; c is surface curvature; k is the conical constant of the surface; h is the current coordinate; A, B, C are coefficients of deformation of the 4th, 6th and 8th order, respectively.
EFFECT: design of a compact lens with high information content through minimisation of barrel distortion with simultaneous maintenance of high image quality.
3 cl, 3 dwg
| Title | Year | Author | Number |
|---|---|---|---|
| LENS WITH REMOTE INPUT PUPIL | 2009 |
|
RU2393515C1 |
| WIDE-ANGLED LENS OF FISH EYE TYPE | 2008 |
|
RU2379722C1 |
| WIDE-ANGLE PROJECTION OBJECTIVE | 2005 |
|
RU2302650C1 |
| APOCHROMATIC LENS | 2010 |
|
RU2429508C1 |
| LARGE APERTURE LENS FOR THERMAL IMAGING DEVICE | 2009 |
|
RU2403598C1 |
| WIDE-ANGLE OCULAR SYSTEM | 1996 |
|
RU2099758C1 |
| HIGH-SPEED WIDE-ANGLE LENS WITH OUTSIDE ENTRANCE PUPIL | 1992 |
|
RU2024038C1 |
| WIDE-ANGLE OBJECTIVE WITH EXTENDED ENTRANCE PUPIL | 2006 |
|
RU2313812C2 |
| ULTRA-WIDE-ANGLE HIGH-APERTURE RETROFOCUS ATHERMAL INFRARED LENS | 2024 |
|
RU2837522C1 |
| VARIABLE FOCAL DISTANCE OBJECTIVE WITH THREE GROUPS OF LENSES | 1998 |
|
RU2148847C1 |

