Изобретение относится к ядерной физике, а точнее, к способам получения изображений различных объектов с использованием мюонов космических лучей и предназначено для мониторинга состояния и процессов в окружающей среде.
Известен способ геологической томографии с помощью мюонов космических лучей [1]. Исследование определенной геологической структуры проводится путем нескольких измерений интенсивности мюонов, осуществляемых в различных точках. Трехмерный анализ данных позволяет определить распределение плотности минералов на исследуемом участке. Недостатком данного способа является необходимость размещения детекторов под землей, что зачастую требует значительных затрат. Кроме того, для проведения томографического анализа требуется довольно большое число измерений, что значительно увеличивает время томографии.
Известен способ получении информации о внутренней структуре объектов больших размеров с помощью мультисекционной регистрации горизонтальных мюонов космических лучей [2]. При этом изучаемый объект размещают между координатно-чувствительными детекторами и после анализа траекторий мюонов до и после пролета сквозь объект определяют внутреннюю структуру объекта. Недостатком данного метода является использование двух координатно-чувствительных детекторов. Кроме того, поток горизонтальных мюонов космических лучей очень мал (на два порядка меньше, чем вертикальных), поэтому проведение томографии потребует значительного времени экспозиции.
Известен также способ томографического контроля крупногабаритных грузов [3], в котором используется пара координатно-чувствительных детекторов, расположенных по бокам объекта. С их помощью задают квазипараллельные пучки мюонов под различными направлениями и по ослаблению потоков космических мюонов под разными направлениями воспроизводят томографическую картину содержимого закрытого транспортного средства без сканирования объекта. Недостатками данного способа являются использование двух координатно-чувствительных детекторов и необходимость обязательного расположения исследуемого объекта между ними. Кроме того, при расположении координатных детекторов по бокам объекта большинство направлений соответствует окологоризонтальным мюонам, поток которых невелик, что требует значительного времени для проведения томографии.
Наиболее близким к предложенному способу и устройству является способ регистрации потока мюонов космических лучей на поверхности Земли в широком интервале зенитных углов с помощью устройств, представляющих собой координатные детекторы, состоящие из нескольких параллельных регистрирующих плоскостей [4-5]. Подобные устройства регистрируют мюоны космических лучей и определяют координаты xk, yk, zk точек прохождения мюона через k-ю плоскость координатного детектора. Далее по методу наименьших квадратов [6] вычисляют параметры линии трека мюона в проекции XZ по формуле х=а·z+b, где
n - число сработавших координатных плоскостей в детекторе, зарегистрировавших мюон, и вычисляют параметры линии трека мюона в проекции YZ по формуле: y=с·z+d, где параметры с и d рассчитывают аналогично параметрам а и b. После чего вычисляют зенитный θ и азимутальный φ углы прилета трека в установку из системы уравнений
и определяют число мюонов для нескольких направлений небесной сферы. Недостатком таких устройств является то, что точность реконструкции углов прилета мюонов в детектор невысока и составляет несколько градусов, а максимально возможное число реконструируемых направлений прилета ограничено конструкцией детектора: количеством координатных плоскостей, размерами и количеством регистрирующих элементов в них. Эти недостатки не дают возможности одновременно измерять поток мюонов с любых направлений небесной полусферы, и, как следствие, подобный способ регистрации мюонов не позволяет получать изображения с помощью мюонов космических лучей.
Технический результат предлагаемого изобретения направлен на повышение точности реконструкции углов прилета мюонов в детектор и обеспечение возможности одновременно измерять поток мюонов со всех направлений небесной полусферы, что позволяет получать изображения небесной полусферы в потоке мюонов космических лучей, то есть мюонографии.
Указанный технический результат достигается тем, что в известном способе, включающем регистрацию мюонов космических лучей на поверхности Земли с помощью координатного детектора, измерение координат xk, yk, zk точек прохождения мюона через k-ю плоскость координатного детектора, вычисление зенитного θ и азимутального φ углов прилета мюона в установку, мюоны космических лучей регистрируют одновременно со всех направлений небесной полусферы сначала в течение подготовительного этапа длительностью ΔT, при этом координаты каждого мюона измеряют не менее чем в половине координатных плоскостей детектора, а после измерения координат xk, yk, zk их значения в режиме реального времени передают в систему обработки экспериментальной информации, с помощью которой для каждого мюона вычисляют зенитный и азимутальный углы прилета мюона (θ, φ) по формулам (1)-(2). Предварительно проводят разделение угловых диапазонов чувствительности детектора мюонов по зенитному углу [0°-θmax] и по азимутальному углу [0°-360°] на равные интервалы шириной Δθ - всего imax интервалов и Δφ - всего jmax интервалов, ширина интервалов зенитного и азимутального углов не превышает 5 градусов, далее находят угловой интервал [(i·Δθ, (i+1)Δθ); (j·Δφ, (j+1)Δφ)], где 0≤i<imax, 0≤j<jmax, внутри которого лежат значения полученных углов прилета мюона (θ, φ), и увеличивают значение числа мюонов в найденном зенитно-азимутальном интервале с номером (i, j) на единицу и, таким образом, в течение времени ΔT заполняют матрицу множественности мюонов  ij, называемую фоновой, размером imax на jmax ячеек. Далее регистрируют мюоны космических лучей одновременно со всех направлений небесной полусферы в течение экспозиционного этапа длительностью Δt, причем величина Δt как минимум в десять раз меньше, чем ΔT, и в течение экспозиционного этапа таким же способом, как и в течение подготовительного этапа, заполняют матрицу множественности мюонов Nij, называемую экспозиционной. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям по формуле:
ij, называемую фоновой, размером imax на jmax ячеек. Далее регистрируют мюоны космических лучей одновременно со всех направлений небесной полусферы в течение экспозиционного этапа длительностью Δt, причем величина Δt как минимум в десять раз меньше, чем ΔT, и в течение экспозиционного этапа таким же способом, как и в течение подготовительного этапа, заполняют матрицу множественности мюонов Nij, называемую экспозиционной. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям по формуле:

Полученную таким образом матрицу относительных вариаций потока мюонов ΔNij преобразуют в изображение размером imax на jmax точек, которое представляет собой мюонографию.
При этом согласно п.2 формулы изобретения дополнительно после регистрации мюона, измерения координат xk, yk, zk точек его прохождения через k-ю плоскость координатного детектора и передачи значений этих координат в режиме реального времени в систему обработки экспериментальной информации для каждого мюона определяют проекционные углы прилета мюона в установку θx и θу по формулам

Предварительно проводят разделение угловых диапазонов чувствительности детектора мюонов по проекционным углам  и
и  на равные интервалы шириной Δθx - всего iXmax интервалов и ΔθУ - всего jYmax интервалов, ширина интервалов не превышает 5 градусов, после чего находят угловой интервал [(i·Δθx, (i+1)Δθx); (j·Δθy, (j+1)Δθy)], где 0≤i<iXmax, 0≤j<jYmax, внутри которого лежат значения проекционных углов прилета мюона в установку θx и θy, и увеличивают значение числа мюонов в найденном угловом интервале с номером (i, j) на единицу. Таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в проекционных углах
на равные интервалы шириной Δθx - всего iXmax интервалов и ΔθУ - всего jYmax интервалов, ширина интервалов не превышает 5 градусов, после чего находят угловой интервал [(i·Δθx, (i+1)Δθx); (j·Δθy, (j+1)Δθy)], где 0≤i<iXmax, 0≤j<jYmax, внутри которого лежат значения проекционных углов прилета мюона в установку θx и θy, и увеличивают значение числа мюонов в найденном угловом интервале с номером (i, j) на единицу. Таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в проекционных углах  размером iXmax на jYmax ячеек и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в проекционных углах N1ij. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в проекционных углах по формуле:
размером iXmax на jYmax ячеек и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в проекционных углах N1ij. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в проекционных углах по формуле:

Полученную таким образом матрицу относительных вариаций потока мюонов ΔN1ij преобразуют в изображение размером iXmax на jYmax точек, которое представляет собой мюонографию в проекционных углах.
При этом согласно п.3 формулы изобретения дополнительно после регистрации мюона, измерения координат xk, yk, zk точек его прохождения через k-ю плоскость координатного детектора, передачи значений этих координат в режиме реального времени в систему обработки экспериментальной информации, определения проекционных углов прилета мюона в установку θx и θy проводят разделение диапазонов чувствительности детектора мюонов по тангенсам проекционных углов  и
и  на равные интервалы шириной Δtanθx - всего iTXmax интервалов и Δtanθy - всего jTYmax интервалов, ширина интервалов не превышает 0.5. После чего находят интервал [(i·Δtanθx, (i+1)Δtanθx); (j·Δtanθy, (j+1)Δtanθy)], где 0≤i<iTXmax, 0≤j<jTYmax, внутри которого лежат значения тангенсов проекционных углов прилета мюона в установку tanθx и tanθy, и увеличивают значение числа мюонов в найденном интервале с номером (i, j) на единицу. Таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в тангенсах проекционных углов
на равные интервалы шириной Δtanθx - всего iTXmax интервалов и Δtanθy - всего jTYmax интервалов, ширина интервалов не превышает 0.5. После чего находят интервал [(i·Δtanθx, (i+1)Δtanθx); (j·Δtanθy, (j+1)Δtanθy)], где 0≤i<iTXmax, 0≤j<jTYmax, внутри которого лежат значения тангенсов проекционных углов прилета мюона в установку tanθx и tanθy, и увеличивают значение числа мюонов в найденном интервале с номером (i, j) на единицу. Таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в тангенсах проекционных углов  размером iTXmax на jTYmax ячеек и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в тангенсах проекционных углов N2ij. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в тангенсах проекционных углов по формуле:
размером iTXmax на jTYmax ячеек и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в тангенсах проекционных углов N2ij. После окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в тангенсах проекционных углов по формуле:

Полученную таким образом матрицу относительных вариаций потока мюонов ΔN2ij преобразуют в изображение размером iTXmax на jTYmax точек, которое представляет собой мюонографию в тангенсах проекционных углов.
Согласно п.4 формулы изобретения после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии дополнительно проводят несколько экспозиционных этапов под номерами m=2, …, М, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов  и, используя при этом одну фоновую матрицу
и, используя при этом одну фоновую матрицу  для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов по формуле
для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов по формуле  . Полученные таким образом матрицы относительных вариаций потока мюонов
. Полученные таким образом матрицы относительных вариаций потока мюонов  преобразуют в изображения размером imax на jmax точек, которые представляют собой мюонографии.
преобразуют в изображения размером imax на jmax точек, которые представляют собой мюонографии.
Согласно п.5 формулы изобретения после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии в проекционных углах дополнительно проводят несколько экспозиционных этапов под номерами m=2, …, М, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов в проекционных углах  и, используя при этом одну фоновую матрицу в проекционных углах
и, используя при этом одну фоновую матрицу в проекционных углах  для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в проекционных углах по формуле
для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в проекционных углах по формуле  . Полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах
. Полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах  преобразуют в изображения размером iXmax на jYmax точек, которые представляют собой мюонографии в проекционных углах.
преобразуют в изображения размером iXmax на jYmax точек, которые представляют собой мюонографии в проекционных углах.
Согласно п.6 формулы изобретения после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии в тангенсах проекционных углов дополнительно проводят несколько экспозиционных этапов под номерами m=2, …, М, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов в тангенсах проекционных углов  и, используя при этом одну фоновую матрицу в тангенсах проекционных углов
и, используя при этом одну фоновую матрицу в тангенсах проекционных углов  для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в тангенсах проекционных углов по формуле
для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в тангенсах проекционных углов по формуле  . Полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах
. Полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах  преобразуют в изображения размером iTXmax на jTYmax точек, которые представляют собой мюонографии в проекционных углах.
преобразуют в изображения размером iTXmax на jTYmax точек, которые представляют собой мюонографии в проекционных углах.
Для реализации способов по пп.1-6 в формуле изобретения предложено устройство, включающее координатный детектор для регистрации заряженных частиц, который состоит из нескольких горизонтальных координатных плоскостей, расположенных параллельно друг другу, при этом каждая плоскость состоит из двух слоев - Х-слой и Y-слой - регистрирующих элементов, представляющих собой детекторы мюонов, ширина которых в Х-слоях равна sx, а ширина в Y-слоях равна sy, кроме того, в X и Y слоях каждой плоскости регистрирующие элементы уложены взаимно перпендикулярно, систему для обработки экспериментальной информации и устройство для визуализации, при этом количество, размеры и взаимное расположение регистрирующих элементов в координатных плоскостях выбраны исходя из требований, определяемых соотношениями:
где
N - число координатных плоскостей в детекторе,
mx - количество регистрирующих элементов в Х-слоях,
my - количество регистрирующих элементов в Y-слоях,
Δz - расстояние между координатными плоскостями.
При этом количество регистрирующих элементов в координатных плоскостях и число плоскостей в детекторе выбраны исходя из требования, определяемого соотношением:

Сущность предложенного изобретения заключается в регистрации потока мюонов одновременно со всех направлений небесной полусферы с одновременным увеличением точности реконструкции углов прилета мюона в детектор, что позволяет получать изображения с помощью потока мюонов космических лучей. Этот способ реализуется путем выбора количества, размеров и взаимного расположения регистрирующих элементов в координатных плоскостях устройства для получения мюонографии исходя из условий (7)-(8), накладываемых на конструкцию детектора. При выполнении условия (7) точность реконструкции трека мюона в координатном детекторе выше, чем размеры угловых ячеек матриц множественности мюонов, а при выполнении условия (8) количество возможных реконструируемых направлений для треков мюонов на два порядка превышает количество угловых ячеек матриц множественности мюонов. В этом случае получение мюонографии аналогично наложению двумерной сетки в виде матрицы множественности мюонов на измеренное непрерывное угловое распределение потока мюонов из верхней полусферы. Этот способ принципиально отличается от ранее используемых способов регистрации мюонов из верхней полусферы с помощью координатных детекторов [4-5], которые измеряют поток мюонов из нескольких направлений небесной сферы, получая, таким образом, дискретную информацию об интенсивности потока мюонов из конечного количества направлений, причем число направлений однозначно определяется конструкцией детектора.
Образование мюонов в атмосфере происходит на высоте 15-20 км в результате ядерных взаимодействий частиц первичного космического излучения (ПКИ), в основном протонов, с ядрами атомов атмосферы: азотом и кислородом. Мюоны, которые являются продуктом распада π-мезонов, в больших количествах образующихся при прохождении ПКИ через верхние слои атмосферы, легко проходят через нижние слои атмосферы, в основном сохраняя направления движения первичных частиц. Энергия частиц первичного космического излучения, ответственных за образование потока мюонов на поверхности Земли, достаточно высока и лежит в диапазоне от нескольких десятков до нескольких сотен гигаэлектронвольт. Первичные космические лучи и вторичные мюоны при таких энергиях являются природным проникающим излучением, которое пронизывает межпланетное пространство, магнитосферу и атмосферу Земли. В спокойных условиях поток первичных космических лучей имеет галактическое происхождение и обладает высокой степенью изотропии в пространстве и постоянства во времени. Следовательно, природный поток мюонов космических лучей на поверхности Земли является уже готовым постоянным источником проникающего излучения, интенсивность которого хорошо известна [7].
Предложенное в данном изобретении устройство, которое регистрирует поток мюонов со всех направлений, можно рассматривать в качестве экрана для получения изображения любых областей пространства или объектов, расположенных на пути движения проникающего излучения. При этом используется поток мюонов из всей верхней полусферы, а не окологоризонтальный или околовертикальный. Для получения изображения достаточно, чтобы исследуемый объект находился на пути потока мюонов космических лучей, регистрируемого установкой, или косвенным образом влиял на характеристики этого потока.
Схема устройства для получения мюонографии представлена на фиг.1. Мюоны космических лучей, прилетающие со всех направлений небесной полусферы, регистрируют координатным детектором 1, состоящим из нескольких координатных плоскостей 2, расположенных горизонтально и параллельных друг другу. Каждая координатная плоскость сложена из Х-слоя 3 и Y-слоя 4, которые также горизонтальны. Каждый слой состоит из большого количества регистрирующих элементов 5, представляющих собой детекторы мюонов, причем в Х-слое и в Y-слое регистрирующие элементы уложены взаимно перпендикулярно. Информацию о координатах точек прохождения мюона через координатные плоскости координатного детектора передают в систему обработки экспериментальной информации 6, в которой вычисляют углы прилета мюона, и заполняют матрицы множественности мюонов. После окончания времени экспозиции в системе обработки экспериментальной информации формируют матрицу относительных вариаций мюонов по различным направлениям, которую передают в устройство для визуализации 7. Устройство для визуализации преобразует матрицу относительных вариаций мюонов в изображение, которое представляет собой мюонографию 8.
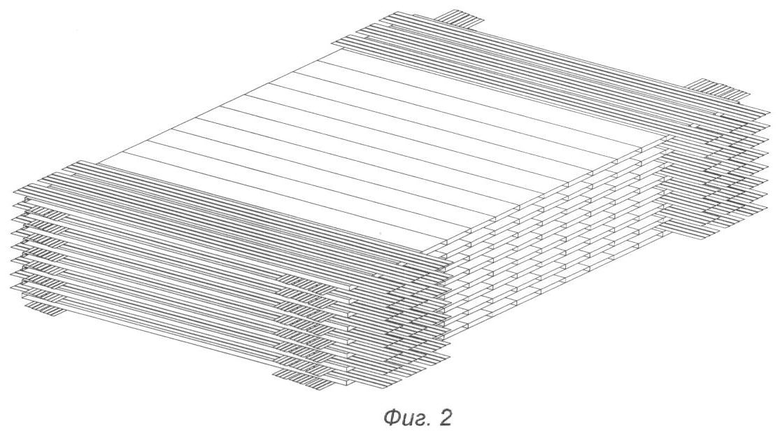
Работоспособность способа была проверена при проведении измерений интенсивности потока мюонов на поверхности Земли на координатном детекторе (фиг.2), позволяющем регистрировать мюоны космических лучей в широком интервале зенитных углов. Детектор состоит из восьми (N=8) координатных плоскостей, в каждой из которых находится 320 стримерных трубок сечением 1 мм × 1 мм. Координаты мюона в каждой координатной плоскости определяются путем съема сигналов со внешних стрипов, которые в каждой плоскости расположены параллельно стримерным трубкам, строго над ними (Х-слой, mx=320), и перпендикулярно стримерным трубкам (Y-слой). Количество стрипов в Y-слое немного меньше, чем Х-слое (my=288). Ширина стрипов в Х-проекции совпадает с шириной стримерных трубок (sx=1 мм), а ширина стрипов в Y-проекции равна sy=1 мм. Расстояние между плоскостями детектора равно Δz=500 мм. Максимальный зенитный угол приема установки равен θmax=80°, а размеры угловых интервалов равны Δθ=1°, Δφ=4°, при этом количество угловых интервалов составляет imax=80, jmax=90, что соответствует разрешению мюонографии, равному imax×jmax=7200 точек. Параметры установки обеспечивают выполнение условий (7) и (8), которые в данном случае выглядят следующим образом:
0.017°<1°,
0.21°<4°
и
1014>720000,
то есть заведомо выполняются.
Информация с координатного детектора поступает в систему обработки экспериментальной информации, представляющую собой компьютер со специальным программным обеспечением. К компьютеру подключено устройство для визуализации изображения, представляющее собой принтер.
Изобретение работает следующим образом. На подготовительном этапе длительностью ΔT=1440 минут с помощью координатного детектора регистрируют мюоны космических лучей. При срабатывании пяти координатных плоскостей из восьми измеряют координаты прохождения мюона через каждую сработавшую плоскость. Координаты передают в систему обработки экспериментальной информации, в которой в режиме реального времени проводят реконструкцию трека каждого мюона по формулам (1)-(2), определяют углы прилета мюона в детектор и согласно п.1 формулы изобретения заполняют фоновую матрицу множественности мюонов  , дополнительно согласно пп.2 и 3 формулы изобретения заполняют фоновую матрицу множественности мюонов в проекционных углах
, дополнительно согласно пп.2 и 3 формулы изобретения заполняют фоновую матрицу множественности мюонов в проекционных углах  и фоновую матрицу множественности мюонов в тангенсах проекционных углов
и фоновую матрицу множественности мюонов в тангенсах проекционных углов  . После окончания подготовительного этапа проводят экспозиционный этап длительностью Δt=1 минута, в течение которого заполняют экспозиционную матрицу множественности мюонов Nij, дополнительно согласно пп.2 и 3 формулы изобретения заполняют матрицу множественности мюонов в проекционных углах N1ij и матрицу множественности мюонов в тангенсах проекционных углов N2ij. После окончания экспозиционного этапа в системе обработки экспериментальной информации вычисляют матрицу относительных вариаций мюонов по различным направлениям ΔNij, дополнительно согласно пп.2 и 3 формулы изобретения вычисляют матрицу относительных вариаций мюонов в проекционных углах ΔN1ij и матрицу относительных вариаций мюонов в тангенсах проекционных углов ΔN2ij. Данные матрицы направляют на принтер для визуализации. Визуализация происходит путем присвоения каждому значению в ячейках матриц определенного цвета. Пример визуализованной матрицы ΔNij которая представляет собой мюонографию небесной полусферы, изображен на фиг.3. Пример визуализованной матрицы ΔN1ij, которая представляет собой мюонографию в проекционных углах, изображен на фиг.4. Пример визуализованной матрицы ΔN2ij, которая представляет собой мюонографию в тангенсах проекционных углов, изображен на фиг.5.
. После окончания подготовительного этапа проводят экспозиционный этап длительностью Δt=1 минута, в течение которого заполняют экспозиционную матрицу множественности мюонов Nij, дополнительно согласно пп.2 и 3 формулы изобретения заполняют матрицу множественности мюонов в проекционных углах N1ij и матрицу множественности мюонов в тангенсах проекционных углов N2ij. После окончания экспозиционного этапа в системе обработки экспериментальной информации вычисляют матрицу относительных вариаций мюонов по различным направлениям ΔNij, дополнительно согласно пп.2 и 3 формулы изобретения вычисляют матрицу относительных вариаций мюонов в проекционных углах ΔN1ij и матрицу относительных вариаций мюонов в тангенсах проекционных углов ΔN2ij. Данные матрицы направляют на принтер для визуализации. Визуализация происходит путем присвоения каждому значению в ячейках матриц определенного цвета. Пример визуализованной матрицы ΔNij которая представляет собой мюонографию небесной полусферы, изображен на фиг.3. Пример визуализованной матрицы ΔN1ij, которая представляет собой мюонографию в проекционных углах, изображен на фиг.4. Пример визуализованной матрицы ΔN2ij, которая представляет собой мюонографию в тангенсах проекционных углов, изображен на фиг.5.
Таким образом, предложенный способ и устройство для его реализации позволяют получать мюонографии с помощью одного координатного детектора, регистрирующего мюоны космических лучей. Мюонография представляет собой изображение небесной сферы над детектором и любых возмущенных областей, попадающих в конус приема детектора. Так как мюоны космических лучей и первичное космическое излучение, которое формирует поток таких мюонов, имеют большую проникающую способность, то полученная мюонография содержит информацию и о размерах, и о внутренней структуре возмущенной области, расположенной над устройством для получения мюонографии.
Список литературы
1. Патент Канады. СА 2603829. Geological tomography using cosmic rays. 26.07.2007.
2. Заявка на патент Японии. JP 2006284329. Method of acquiring internal structure information of large-sized structure by horizontal cosmic ray muon by multi-division type detection. 19.10.2006.
3. Патент Российской Федерации. RU 2072513. Способ томографического контроля крупногабаритных грузов. 27.01.1997.
4. М.Б.Амельчаков и др. Координатный детектор ДЕКОР для исследования космических лучей под большими зенитными углами. Изв. РАН. сер. физич. 2002. Т.66. №11, с.1611-1613.
5. Y.Hayashi et al. A large area muon tracking detector for ultra-high energy cosmic ray astrophysics - the GRAPES-3 experiment. Nuclear Instruments and Methods in Physics Research A, 2005. V.545. P.643-657.
6. W.H.Press et al. Numerical Recipes. The Art of Scientific Computing. Third Edition. Cambridge University Press. 2007. P.785.
7. S.Eidelman el al. Particle Data Group, Physics Letters B. 2004. V.592, P.228.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ГЕЛИОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2010 |
|
RU2446495C1 |
| СПОСОБ ДИАГНОСТИКИ АВАРИЙНОГО ЯДЕРНОГО РЕАКТОРА | 2012 |
|
RU2503075C1 |
| Способ азимутального сканирования атмосферы с использованием потока мюонов космических лучей | 2023 |
|
RU2819137C1 |
| СПОСОБ КАЛИБРОВКИ МЮОННЫХ ГОДОСКОПОВ | 2011 |
|
RU2461903C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1993 |
|
RU2072513C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА ШИРОКИХ АТМОСФЕРНЫХ ЛИВНЕЙ | 2013 |
|
RU2549612C1 |
| МЮОННЫЙ ГОДОСКОП И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ОБЪЕКТОВ | 2020 |
|
RU2761333C1 |
| Ледяной детектор мюонов | 2020 |
|
RU2755578C1 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ ЗАВИСИМОСТИ ОТКЛИКА ОПТИЧЕСКОГО МОДУЛЯ НЕЙТРИННОГО ЧЕРЕНКОВСКОГО ВОДНОГО ТЕЛЕСКОПА | 2019 |
|
RU2726265C1 |


Изобретение относится к ядерной физике, а точнее, к способам получения изображений различных объектов с использованием мюонов космических лучей и предназначено для мониторинга состояния и процессов в окружающей среде.
Мюоны космических лучей регистрируют одновременно со всех направлений небесной полусферы сначала в течение подготовительного, затем в течение экспозиционного этапов. При этом для каждого мюона определяют углы прилета в установку, находят угловой интервал, внутри которого лежат значения полученных углов прилета, увеличивают значение числа мюонов в найденном интервале на единицу и, таким образом, заполняют фоновую и экспозиционную матрицы множественности мюонов. Далее с помощью заполненных матриц вычисляют матрицу относительных вариаций мюонов по различным направлениям, которую преобразуют в изображение, представляющее собой мюонографию.
В устройстве количество, размеры и взаимное расположение регистрирующих элементов в координатных плоскостях выбраны исходя из требований, повышающих угловую точность реконструкции трека мюона и количество возможных реконструируемых направлений, а система обработки экспериментальной информации способна вычислять углы прилета в установку каждого мюона в режиме реального времени.
Изобретение направлено на повышение точности реконструкции углов прилета мюонов в детектор и обеспечение возможности одновременно измерять поток мюонов со всех направлений небесной полусферы. 2 н. и 5 з.п. ф-лы, 5 ил.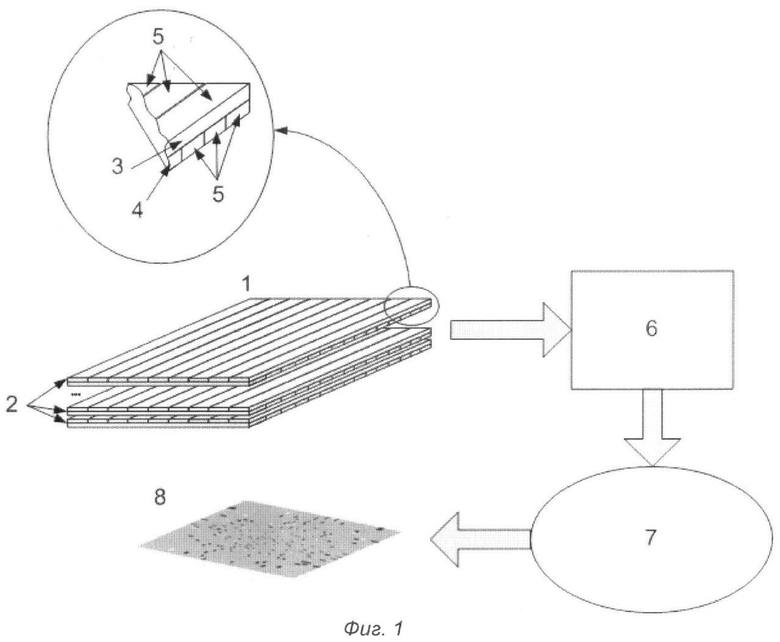
1. Способ для получения мюонографий, включающий регистрацию мюонов космических лучей, измерение координат xk, yk, zk точек прохождения мюона через k-ую плоскость координатного детектора, по которым вычисляют зенитный θ и азимутальный φ углы прилета мюона в установку, отличающийся тем, что мюоны космических лучей регистрируют одновременно со всех направлений небесной полусферы сначала в течение подготовительного этапа длительностью ΔT, при этом координаты каждого мюона измеряют не менее чем в половине координатных плоскостей детектора, предварительно угловые диапазоны чувствительности детектора мюонов по зенитному углу [0º-θmax] и по азимутальному углу [0°-360°] делят на равные интервалы шириной Δθ - всего imax интервалов и Δφ - всего jmax интервалов, ширина интервалов зенитного и азимутального углов не превышает 5°, и после вычисления для каждого мюона зенитного и азимутального углов прилета находят угловой интервал [(i·Δθ, (i+1)Δθ); (j·Δφ, (j+1)Δφ)], где 0≤i<imax, 0≤j<jmax, внутри которого лежат значения полученных углов прилета мюона (θ, φ), и увеличивают значение числа мюонов в найденном зенитно-азимутальном интервале с номером (i, j) на единицу и, таким образом, в течение времени ΔT заполняют матрицу множественности мюонов  , называемую фоновой, размером imax на jmax ячеек, после чего регистрируют мюоны космических лучей одновременно со всех направлений небесной полусферы в течение экспозиционного этапа длительностью Δt, причем величина Δt как минимум в десять раз меньше, чем ΔT, и в течение экспозиционного этапа таким же способом, как и в течение подготовительного этапа, заполняют матрицу множественности мюонов Nij, называемую экспозиционной, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям по формуле
, называемую фоновой, размером imax на jmax ячеек, после чего регистрируют мюоны космических лучей одновременно со всех направлений небесной полусферы в течение экспозиционного этапа длительностью Δt, причем величина Δt как минимум в десять раз меньше, чем ΔT, и в течение экспозиционного этапа таким же способом, как и в течение подготовительного этапа, заполняют матрицу множественности мюонов Nij, называемую экспозиционной, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям по формуле  , полученную таким образом матрицу относительных вариаций потока мюонов ΔNij преобразуют в изображение размером imax на jmax точек, которое представляет собой мюонографию.
, полученную таким образом матрицу относительных вариаций потока мюонов ΔNij преобразуют в изображение размером imax на jmax точек, которое представляет собой мюонографию.
2. Способ по п.1, отличающийся тем, что дополнительно после регистрации мюона измерения координат xk, yk, zk точек его прохождения через k-ую плоскость координатного детектора, определяют проекционные углы прилета каждого мюона в установку θх и θy и проводят разбиение угловых диапазонов чувствительности детектора мюонов по проекционным углам  и
и  на равные интервалы шириной Δθх - всего iXmax интервалов и Δθy - всего jYmax интервалов, ширина интервалов не превышает 5°, после чего для каждого мюона находят угловой интервал [(i·Δθx, (i+1)Δθx); (j·Δθy, (j+1)Δθy)], где 0≤i<iXmax, 0≤j<JYmax, внутри которого лежат значения проекционных углов прилета мюона в установку θх и θy, и увеличивают значение числа мюонов в найденном угловом интервале с номером (i, j) на единицу и, таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в проекционных углах
на равные интервалы шириной Δθх - всего iXmax интервалов и Δθy - всего jYmax интервалов, ширина интервалов не превышает 5°, после чего для каждого мюона находят угловой интервал [(i·Δθx, (i+1)Δθx); (j·Δθy, (j+1)Δθy)], где 0≤i<iXmax, 0≤j<JYmax, внутри которого лежат значения проекционных углов прилета мюона в установку θх и θy, и увеличивают значение числа мюонов в найденном угловом интервале с номером (i, j) на единицу и, таким образом, в течение подготовительного этапа длительностью ΔT заполняют фоновую матрицу множественности мюонов в проекционных углах  , размером iXmax на jYmax ячеек, и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в проекционных углах N1ij, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в проекционных углах по формуле:
, размером iXmax на jYmax ячеек, и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в проекционных углах N1ij, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в проекционных углах по формуле:  , полученную таким образом матрицу относительных вариаций потока мюонов ΔN1ij преобразуют в изображение размером iXmax на jYmax точек, которое представляет собой мюонографию в проекционных углах.
, полученную таким образом матрицу относительных вариаций потока мюонов ΔN1ij преобразуют в изображение размером iXmax на jYmax точек, которое представляет собой мюонографию в проекционных углах.
3. Способ по п.1 или 2, отличающийся тем, что дополнительно после регистрации мюона, измерения координат xk, yk, zk точек его прохождения через k-ую плоскость координатного детектора, определения проекционных углов прилета мюона в установку θх и θy, проводят разделение диапазонов чувствительности детектора мюонов по тангенсам проекционных углов и  на равные интервалы шириной Δtanθx - всего iTXmax интервалов и Δtanθy - всего jTYmax интервалов, ширина интервалов не превышает 0,5, после чего находят интервал [(i·Δtanθx, (i+1)Δtanθx); (j·Δtanθy, (j+1)Δtanθy)], где 0≤i<iTXmax, 0≤j<jTYmax, внутри которого лежат значения тангенсов проекционных углов прилета мюона в установку tanθx и tanθy, и увеличивают значение числа мюонов в найденном интервале с номером (i, j) на единицу и, таким образом, в течение подготовительного этапа длительностью ΔТ заполняют фоновую матрицу множественности мюонов в тангенсах проекционных углов
на равные интервалы шириной Δtanθx - всего iTXmax интервалов и Δtanθy - всего jTYmax интервалов, ширина интервалов не превышает 0,5, после чего находят интервал [(i·Δtanθx, (i+1)Δtanθx); (j·Δtanθy, (j+1)Δtanθy)], где 0≤i<iTXmax, 0≤j<jTYmax, внутри которого лежат значения тангенсов проекционных углов прилета мюона в установку tanθx и tanθy, и увеличивают значение числа мюонов в найденном интервале с номером (i, j) на единицу и, таким образом, в течение подготовительного этапа длительностью ΔТ заполняют фоновую матрицу множественности мюонов в тангенсах проекционных углов  , размером iTXmax на jTYmax ячеек, и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в тангенсах проекционных углов N2ij, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в тангенсах проекционных углах по формуле:
, размером iTXmax на jTYmax ячеек, и в течение экспозиционного этапа длительностью Δt аналогичным образом заполняют экспозиционную матрицу множественности мюонов в тангенсах проекционных углов N2ij, после окончания времени экспозиции Δt вычисляют матрицу относительных вариаций мюонов по различным направлениям в тангенсах проекционных углах по формуле:  , полученную таким образом матрицу относительных вариаций потока мюонов ΔN2ij преобразуют в изображение размером iTXmax на jTYmax точек, которое представляет собой мюонографию в тангенсах проекционных углов.
, полученную таким образом матрицу относительных вариаций потока мюонов ΔN2ij преобразуют в изображение размером iTXmax на jTYmax точек, которое представляет собой мюонографию в тангенсах проекционных углов.
4. Способ по п.1, отличающийся тем, что после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии, дополнительно проводят несколько экспозиционных этапов под номерами m=2, …, M, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов  , и, используя при этом одну фоновую матрицу
, и, используя при этом одну фоновую матрицу  для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов по формуле
для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов по формуле  , полученные таким образом матрицы относительных вариаций потока мюонов
, полученные таким образом матрицы относительных вариаций потока мюонов  преобразуют в изображения размером imax на jmax точек, которые представляют собой мюонографии.
преобразуют в изображения размером imax на jmax точек, которые представляют собой мюонографии.
5. Способ по п.2, отличающийся тем, что после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии в проекционных углах, дополнительно проводят несколько экспозиционных этапов, под номерами m=2, …, M, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов в проекционных углах  , и, используя при этом одну фоновую матрицу в проекционных углах
, и, используя при этом одну фоновую матрицу в проекционных углах  для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в проекционных углах по формуле
для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в проекционных углах по формуле  , полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах
, полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах  преобразуют в изображения размером iXmax на jYmax точек, которые представляют собой мюонографии в проекционных углах.
преобразуют в изображения размером iXmax на jYmax точек, которые представляют собой мюонографии в проекционных углах.
6. Способ по п.3, отличающийся тем, что после проведения подготовительного этапа, экспозиционного этапа и получения первой мюонографии в тангенсах проекционных углов, дополнительно проводят несколько экспозиционных этапов, под номерами m=2, …, M, длительность каждого из которых Δt(m) как минимум в десять раз меньше длительности подготовительного этапа, и во время каждого экспозиционного этапа заполняют матрицы множественности мюонов в тангенсах проекционных углов  , и, используя при этом одну фоновую матрицу в тангенсах проекционных углов
, и, используя при этом одну фоновую матрицу в тангенсах проекционных углов  , для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в тангенсах проекционных углов по формуле
, для всех экспозиционных этапов, вычисляют матрицы относительных вариаций потока мюонов в тангенсах проекционных углов по формуле  , полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах
, полученные таким образом матрицы относительных вариаций потока мюонов в проекционных углах  преобразуют в изображения размером iTXmax на jTYmax точек, которые представляют собой мюонографии в проекционных углах.
преобразуют в изображения размером iTXmax на jTYmax точек, которые представляют собой мюонографии в проекционных углах.
7. Устройство для получения мюонографии по пп.1-6, включающее координатный детектор для регистрации заряженных частиц, состоящий из нескольких горизонтальных координатных плоскостей, расположенных параллельно друг другу, при этом каждая плоскость состоит из двух слоев - Х-слой и Y-слой - регистрирующих элементов, представляющих собой детекторы мюонов, ширина которых в Х-слоях равна sx, а ширина в Y-слоях равна sy, кроме того, в Х и Y слоях каждой плоскости регистрирующие элементы уложены взаимно перпендикулярно, систему для обработки экспериментальной информации и устройство для визуализации, отличающееся тем, что количество, размеры и взаимное расположение регистрирующих элементов в координатных плоскостях выбраны, исходя из требований, определяемых соотношениями
 ,
,
 ,
,
где N - число координатных плоскостей в детекторе;
mx - количество регистрирующих элементов в Х-слоях;
my - количество регистрирующих элементов в Y-слоях;
Δz - расстояние между координатными плоскостями,
при этом количество регистрирующих элементов в координатных плоскостях и число плоскостей в детекторе выбраны, исходя из следующего требования:
42N-3mxmy>100·imax·jmax.
| Способ измерения плотности геологических пород в естественном залегании | 1987 |
|
SU1547509A1 |
| Физика микромира | |||
| Под ред | |||
| Д.В.ШИРКОВА | |||
| - М.: Советская энциклопедия, 1980, с.268-270 | |||
| WO 2009002602 А2, 31.12.2008 | |||
| JP 2006284329 A, 19.10.2006 | |||
| JP 2007271400 A, 18.10.2007. | |||

