Изобретение относится к сельскохозяйственному машиностроению и предназначено для управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем.
Известен фронтальный ротационный внутрипочвенный рыхлитель, глубина обработки почвы которым регулируется прямым способом путем изменения расположения опорных колес относительно устройства по вертикали (свидетельство СССР №818512, А01В 49/02, 1981 - прототип).
Наиболее близким по технической сущности к заявляемому объекту является косвенный способ управления глубиной механической обработки почвы путем гидравлического увеличения сцепного веса трактора (Трактор/ ред. М.А.Орлов. - М.: Просвещение, 1980. 272 с. С.153 - аналог).
В данном устройстве имеются недостатки:
- отсутствие прямого регулирования глубины обработки почвы почвообрабатывающей машиной, что снижает стабильность и качество выполнения обработки почвы на заданную глубину;
- регулирование глубины обработки почвы почвообрабатывающей машиной без учета приоритета режима извлечения из почвы рабочего органа фронтального ротационного внутрипочвенного рыхлителя перед режимом подъема, что снижает надежность устройства ввиду вероятности избыточного заглубления рабочего органа в процессе движения агрегата в случае, когда при задержке гидромеханической системы регулирования происходит непосредственная смена режима опускания навески трактора на режим ее подъема.
Технической задачей, для решения которой служит предлагаемое изобретение, является создание условий, при которых обеспечивается прямое устойчивое управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем с приоритетом режима извлечения из почвы рабочего органа фронтального ротационного внутрипочвенного рыхлителя перед режимом подъема при оборудовании трактора гидравлическим распределителем штатной навесной гидравлической системы с электрическим управлением гидравлическим распределителем.
Техническим результатом, получаемым при практическом использовании изобретения, является создание возможности при движении рыхлителя в почве производить прямое дифференцированное управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором, оборудованным электрическим управлением гидросистемой, с высокой стабильностью, качеством и надежностью.
Для решения поставленной технической задачи устройство для дифференцированного управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы, содержащее датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорного элемента с оптико-механическим электронными датчиками положения опорного элемента относительно рамы фронтального ротационного внутрипочвенного рыхлителя, оптико-механическим электронным датчиком угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора, связанной с оптико-механическими электронными датчиками информационно-логической электронной системой управления заданной глубиной обработки почвы, снабжено информационно-логической электронной системой управления заданной глубиной обработки почвы, которая снабжена электронным ключевым манипулятором импульсного циклического включения штатного шагового режима подъема навесной системы трактора и электронным ключевым манипулятором импульсного циклического включения штатного шагового режима опускания навесной системы трактора, причем частота срабатывания электронного ключевого манипулятора импульсного циклического включения штатного шагового режима подъема навесной системы трактора задана информационно-логической электронной системой управления выше, чем частота срабатывания электронного ключевого манипулятора импульсного циклического включения штатного шагового режима опускания навесной системы трактора.
Изобретение поясняется прилагаемыми схемами, где
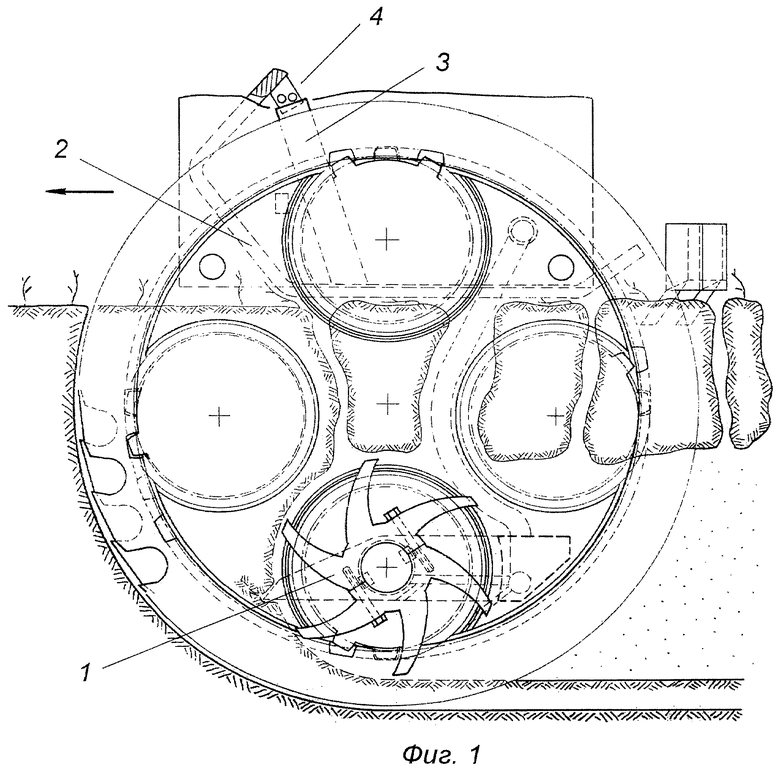
на фиг.1 показано предлагаемое устройство, вид сбоку;
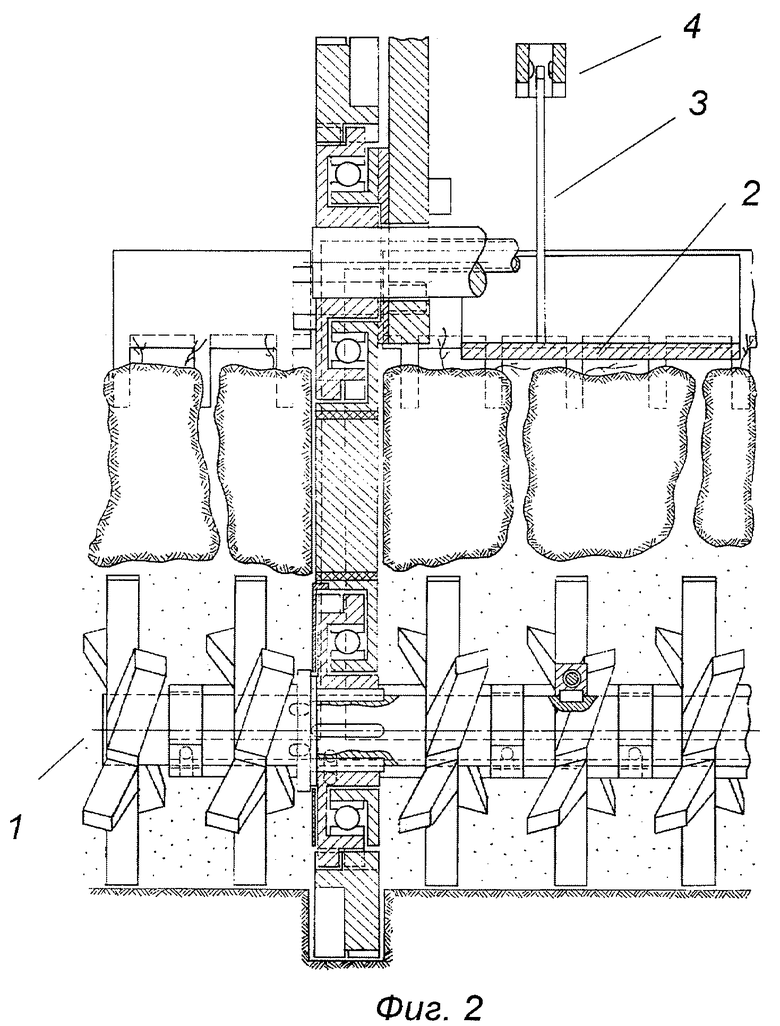
на фиг.2 показано предлагаемое устройство, вид сзади;
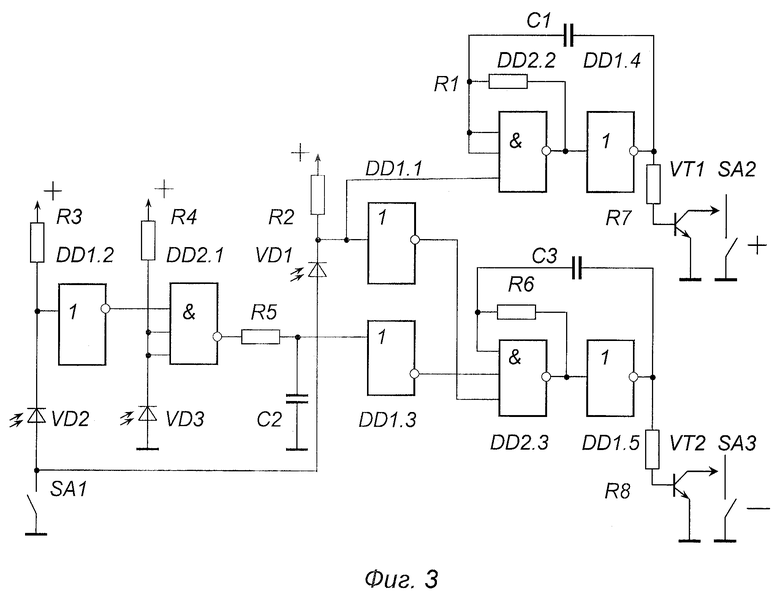
на фиг.3 показана принципиальная электрическая схема информационно-логической электронной системы управления.
Устройство по фиг.1, 2 состоит из почвообрабатывающей машины с рыхлящим рабочим органом, например фронтального ротационного внутрипочвенного рыхлителя 1, механического датчика положения рыхлителя относительно почвы в виде опорного элемента 2, закрепленного на раме рыхлителя с возможностью перемещения при упругой деформации при вертикальной нагрузке 0,05-0,1 веса фронтального ротационного внутрипочвенного рыхлителя, механической оптической шторки 3, выполненной на верхней поверхности опорного элемента 2 и оптически связанной с двойной открытой оптоэлектронной парой 4, установленной на раме фронтального ротационного внутрипочвенного рыхлителя 1.
Устройство снабжено оптико-механическим датчиком предельного заглубления фронтального ротационного внутрипочвенного рыхлителя, по сигналу которого в процессе работы агрегата ограничивают угол наклона вала отбора мощности трактора не более +15°.
Информационно-логическая электронная система управления по фиг.3 содержит блок регистрации информации о глубине обработки почвы фронтальным ротационным внутрипочвенным рыхлителем относительно поверхности почвы по фиг.1, 2 на двойной оптоэлектронной паре 4, по фиг.3 с инфракрасным излучающим диодом и инфракрасными фотодиодами VD1, VD2, задающих начальный ток инфракрасных фотодиодов резисторах R2, R3, инверторах DD1.1, DD1.2, фильтре низких частот на резисторе R5 и конденсаторе С2; блок принудительного извлечения фронтального ротационного внутрипочвенного рыхлителя из почвы на двухпозиционном переключателе SA1; блок защиты рыхлителя и трактора от механических перегрузок содержит узел контроля предельного угла наклона карданного вала привода рыхлителя с оптико-механическим датчиком угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора, состоящим из оптико-механической шторки, установленной на кронштейне навесной системы трактора, и оптоэлектронной открытой инфракрасной пары, установленной на верхнем вале навесной системы трактора, состоящей из светоизлучающего инфракрасного диода и инфракрасного фотодиода VD3 с задающим ток резистором R4; блок электронного манипулирования штатными шаговыми переключателями SA2 (подъем), SA3 (опускание) штатной навесной гидравлической системы трактора с гидравлическим распределителем с электрическим управлением (электронный манипулятор), включенный параллельно цепям управления шаговым опусканием-подъемом штатной навесной гидравлической системы трактора с гидравлическим распределителем с электрическим управлением, выполнен в виде двух управляемых генераторов импульсов соответственно па логических элементах DD2.2, DD1.4, резисторе R1, конденсаторе С1, на логических элементах DD2.3, DD1.4, резисторе R6, конденсаторе С3 с ключевыми элементами на резисторах R7, R8 транзисторах VT1, VT2, переход эмиттер-коллектор каждого из которых подсоединен параллельно соответствующему штатному шаговому переключателю SA2, SA3.
Устройство для дифференцированного управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы работает следующим образом.
Для выполнения технологического процесса внутрипочвенного рыхления оператор включает трансмиссию трактора, начинает движение в выбранном направлении обработки. Фронтальный ротационный внутрипочвенный рыхлитель в исходном положении поднят над поверхностью почвы навесной системой трактора. Информационно-логическая электронная система управления отключена от источника электрического питания.
Опускание гидравлической навесной системой трактора выполняется по штатной схеме до начала погружения рабочего органа фронтального ротационного внутрипочвенного рыхлителя.
Устройство для дифференцированного управления глубиной обработки почвы при фронтальном ротационном внутрипочвенном рыхлении в агрегате с трактором с шаговым электрическим управлением гидравлическим распределителем навесной системы переводят в активный режим путем включения электрического питания информационно-логической электронной системы управления. Переводят двухпозиционный переключатель SA1 в замкнутое положение.
Устройство в номинальном режиме работает следующим образом.
Управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем ведут по электронно-логическим сигналам датчика положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы на оптоэлектронных парах с инфракрасными фотодиодами VD1, VD2.
После замыкания переключателя SA1 инфракрасные фотодиоды VD1 и VD2 дают информацию о глубине погружения рабочего органа фронтального ротационного внутрипочвенного рыхлителя в почву. Когда опорный элемент рыхлителя, с которой связаны оптоэлектронные пары с инфракрасными фотодиодами VD1, VD2, находится в свободном положении или едва касается почвы, инфракрасный фотодиод VD1 облучается излучающим инфракрасным диодом. На входе инвертора DD1.1 и нижнем входе логического элемента DD2.2 устанавливается логический уровень 0, инфракрасный фотодиод VD2 также облучается излучающим инфракрасным диодом, на входе инвертора DD1.2 устанавливается логический уровень 0, на верхнем по фиг.3 входе логического элемента DD2.1 устанавливается логический уровень 1.
Оптическая шторка, установленная на верхнем валу навески, в рабочем положении рыхлителя перекрывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару. При этом инфракрасный светодиод не облучает инфракрасный фотодиод VD3, контролирующий положение карданного вала привода рыхлителя не более +15° относительно продольной оси трактора. На нижнем по фиг.3 входе логического элемента DD2.1 устанавливается логический уровень 1.
На оба входа логического элемента DD2.1 подан логический уровень 1, на его выходе, а также через интегрирующую цепь на резисторе R5 и конденсаторе С2 на входе инвертора DD1.3 устанавливается логический уровень 0. Логический уровень 1 на выходе инвертора DD1.3 разрешает работу управляемого генератора импульсов на логических элементах DD2.3, DD1.4, резисторе R6, конденсаторе С3. Генератор начинает работать и периодически через резистор R8 подает положительные импульсы на ключевой элемент на транзисторе VT2, на его коллекторе формируются импульсы, которые с той же периодичностью замыкают штатный переключатель SA3, навеска трактора опускается.
В момент достижения заданной глубины обработки оптическая связь в оптоэлектронной паре с фотодиодом VD2 разрывается, на входе инвертора DD1.2 устанавливается логический уровень 0, который через элементы DD2.1, DD1.3 запрещает работу генератора импульсов на логических элементах DD2.3, DD1.4, резисторе R6, конденсаторе С3, а также прохождение импульсов через транзистор VT2 на штатный переключатель SA3.
Заглубление рабочего органа прекращается, рыхлитель работает на заданной глубине.
В процессе работы навесной системы трактора на неровностях рельефа поля рыхлитель может быть заглублен в почву на глубину, несколько большую заданной. При этом отключается оптическая связь в открытой оптоэлектронной инфракрасной паре с инфракрасным фотодиодом VD1. На входе инвертора DD1.1 устанавливается логический уровень 1, на его выходе устанавливается логический уровень 0, который запрещает ложное включение режима заглубления рабочего органа в случае нештатного замыкания цепи фотодиода VD2 или обрыва цепи фотодиода VD3.
На нижнем входе логического элемента DD2.2 через резистор R2 также устанавливается логический уровень 1, который разрешает работу управляемого генератора импульсов на логических элементах DD2.2, DD1.4, резисторе R1, конденсаторе С1. Генератор начинает работать и периодически через резистор R7 подает положительные импульсы на ключевой элемент на транзисторе VT1, на его коллекторе формируются импульсы, которые с той же периодичностью замыкают штатный переключатель SA2, навеска трактора поднимается.
В момент достижения заданной глубины обработки оптическая связь в оптоэлектронной паре с фотодиодом VD1 включается, фотодиод VD1 облучается, на нижнем по фиг.3 входе инвертора DD2.2 устанавливается логический уровень 0, который запрещает работу генератора импульсов на логических элементах DD2.2, DD1.4, резисторе R1, конденсаторе С1, а также прохождение импульсов через транзистор VT2 на штатный переключатель SA2.
Извлечение рабочего органа из почвы прекращается. Рыхлитель возвращается из положения избыточного заглубления на заданную глубину обработки почвы.
Информационно-логическая электронная система дифференцированного управления заданной глубиной обработки почвы с электронным манипулятором штатными шаговыми переключателями электрического управления гидравлическим распределителем навесной системы трактора обеспечивает приоритет режима извлечения из почвы рабочего органа фронтального ротационного внутрипочвенного рыхлителя перед режимом подъема.
С целью обеспечения приоритета режима извлечения из почвы рабочего органа фронтального ротационного внутрипочвенного рыхлителя перед режимом подъема постоянную времени цепи R1C1 выбирают меньше, чем у цепи R6C3. Поэтому режим погружения-извлечения фронтального ротационного внутрипочвенного рыхлителя гидравлической системой трактора дифференцирован. Извлечение рабочего органа идет быстрее, чем его погружение. В результате в процессе работы агрегата запоздание системы регулирования на превышение заданной глубины обработки уменьшается ввиду того, что событие избыточного заглубления наступает с меньшей скоростью, чем скорость, с которой предотвращается это событие.
В режиме предельного заглубления фронтального ротационного внутрипочвенного рыхлителя устройство работает следующим образом.
Предельный режим контролируют оптико-механическим путем, индицируя положение карданного вала привода рыхлителя при угле +15° относительно продольной оси трактора. Оптическая шторка, установленная на верхнем валу навески, открывает установленную на неподвижном относительно трактора кронштейне верхнего вала навески открытую оптоэлектронную пару при угле наклона вала отбора мощности трактора более +15°. При этом по фиг.3 облучается инфракрасный фотодиод VD3. На нижнем по фиг.3 входе логического элементе «3и-не» DD2.1 устанавливается логический уровень 0. Независимо от состояния инфракрасного фотодиода VD2 через интегрирующую цепь на резисторе R5 и конденсаторе С2 на входе инверторе DD1.3 устанавливается логический уровень 1, на выходе инвертора DD1.3 устанавливается логический уровень 0. Уровень 0 на выходе инвертора DD1.3 запрещает работу управляемого генератора импульсов на логических элементах DD2.3, DD1.4, резисторе R6, конденсаторе С3 и удерживает в закрытом состоянии ключевой элемент на транзисторе VT2. Информационно-логическая электронная система управления отключает режим «опускание» гидросистемы, электронное замыкание переключателя SA3 логически запрещено. Подача управляющего импульса «опускание» к штатной навесной системе с электрическим управлением гидравлическим распределителем не происходит. Глубина обработки почвы рыхлителем не увеличивается.
Подъем работающего рыхлителя из почвы производится в движении агрегата.
Для выполнения подъема рыхлителя оператор по фиг.3 переводит переключатель SA1 в положение размыкания контактов. Информационно-логический исполнительный блок постоянной глубины обработки почвы рыхлителем принудительно переключается в режим сигнала избыточного заглубления рыхлителя, поскольку при облученном фотодиоде VD1 происходит разрыв цепи его общего провода переключателем SA1 и через резистор R2 на входе инвертора DD1.4 устанавливается уровень логической 1. Навесная система трактора извлекает работающий рыхлитель из почвы.
Подъем работающего рыхлителя из почвы можно производить по штатной схеме, отключив предварительно информационно-логическую электронную систему управления от источника электрического питания.
Рыхлитель последовательно выполняет описанный рабочий цикл.
По завершении внутрипочвенного рыхления или в любой момент работы информационно-логическую электронную систему управления выключают, отключив источник электрического питания.
Использование нового элемента в виде информационно-логической электронной системы дифференцированного управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором, оборудованным электрическим управлением гидросистемой, позволяет при движении рыхлителя в почве производить прямое дифференцированное управление глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором, оборудованным электрическим управлением гидросистемой, с высокой стабильностью, качеством и надежностью, т.к. обеспечиваются:
- высокая скорость реакции системы управления заданной глубиной обработки почвы на выпуклости поверхности поля в направлении обработки агрегатом, точность исполнения обработки почвы на заданной глубине;
- надежность устройства ввиду того, что оно защищено от тяговой перегрузки применением дифференцированного режима погружения-извлечения фронтального ротационного внутрипочвенного рыхлителя гидравлической системой трактора с приоритетом режима извлечения из почвы рабочего органа фронтального ротационного внутрипочвенного рыхлителя перед режимом подъема за счет того, что извлечение рабочего органа из почвы идет быстрее, чем его погружение.
В результате в процессе работы агрегата запоздание системы регулирования на превышение заданной глубины обработки уменьшается, поскольку событие избыточного заглубления наступает с меньшей скоростью, чем скорость, с которой это событие предотвращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ В АГРЕГАТЕ С ТРАКТОРОМ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ГИДРАВЛИЧЕСКИМ РАСПРЕДЕЛИТЕЛЕМ НАВЕСНОЙ СИСТЕМЫ | 2009 |
|
RU2418398C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ | 2009 |
|
RU2418399C2 |
| УСТРОЙСТВО ДЛЯ РОТАЦИОННОГО ВНУТРИПОЧВЕННОГО РЫХЛЕНИЯ | 2009 |
|
RU2407255C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ВАЛА РОТАЦИОННОГО ВНУТРИПОЧВЕННОГО РЫХЛИТЕЛЯ | 2009 |
|
RU2413406C1 |
| СПОСОБ ДОЛГОВРЕМЕННОГО УПРАВЛЕНИЯ ПРОДУКТИВНОСТЬЮ СТЕПНЫХ БИОГЕОСИСТЕМ | 2011 |
|
RU2480980C1 |
| УСТРОЙСТВО ДЛЯ РОТОРНОГО ВНУТРИПОЧВЕННОГО РЫХЛЕНИЯ | 2010 |
|
RU2475005C2 |
| КОМБИНИРОВАННОЕ УСТРОЙСТВО ДЛЯ РОТАЦИОННОГО ВНУТРИПОЧВЕННОГО РЫХЛЕНИЯ | 2009 |
|
RU2440708C2 |
| Глубокорыхлитель для обработки склоновых земель | 2018 |
|
RU2698280C1 |
| УСТРОЙСТВО ДЛЯ РОТАЦИОННОГО ВНУТРИПОЧВЕННОГО РЫХЛЕНИЯ | 2008 |
|
RU2376737C1 |
| СПОСОБ РЕГИСТРАЦИИ ДЫМА | 2003 |
|
RU2256229C2 |
Устройство содержит датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорного элемента. Опорный элемент связан с оптико-механическими электронными датчиками его положения относительно рамы рыхлителя. Устройство имеет также оптико-механический электронный датчик угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора. Оптико-механические электронные датчики связаны с информационно-логической электронной системой управления заданной глубиной обработки почвы. Информационно-логическая электронная система управления снабжена электронными ключевыми манипуляторами импульсного циклического включения штатных шаговых режимов подъема и опускания навесной системы трактора. Частота срабатывания манипулятора включения режима подъема навесной системы трактора задана информационно-логической электронной системой управления выше, чем частота срабатывания манипулятора включения режима опускания навесной системы трактора. Такое конструктивное выполнение позволит при движении агрегата управлять глубиной обработки почвы с высокой стабильностью, качеством и надежностью. 3 ил.
Устройство для дифференцированного управления глубиной обработки почвы фронтальным ротационным внутрипочвенным рыхлителем в агрегате с трактором с электрическим управлением гидравлическим распределителем навесной системы, содержащее датчик вертикального положения рабочего органа фронтального ротационного внутрипочвенного рыхлителя относительно поверхности почвы в виде опорного элемента с оптико-механическими электронными датчиками положения опорного элемента относительно рамы фронтального ротационного внутрипочвенного рыхлителя, оптико-механический электронный датчик угла наклона вала отбора мощности трактора +15° относительно продольной оси трактора, информационно-логическую электронную систему управления заданной глубиной обработки почвы, связанную с оптико-механическими электронными датчиками, отличающееся тем, что информационно-логическая электронная система управления заданной глубиной обработки почвы снабжена электронным ключевым манипулятором импульсного циклического включения штатного шагового режима подъема навесной системы трактора и электронным ключевым манипулятором импульсного циклического включения штатного шагового режима опускания навесной системы трактора, причем частота срабатывания электронного ключевого манипулятора импульсного циклического включения штатного шагового режима подъема навесной системы трактора задана информационно-логической электронной системой управления выше, чем частота срабатывания электронного ключевого манипулятора импульсного циклического включения штатного шагового режима опускания навесной системы трактора.
| РОТАЦИОННЫЙ РЫХЛИТЕЛЬ ПОДГУМУСНОГО СЛОЯ ПОЧВЫ | 2004 |
|
RU2273120C2 |
| Рабочий орган для обработкии почв,подверженных водной эрозии | 1972 |
|
SU442759A1 |
| СПОСОБ ДЕБЛОКИРОВАННОГО ЩЕЛЕВАНИЯ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2223621C1 |
| RU 2053613 C1, 10.02.1996. | |||

