Изобретение относится к области вооружения, в частности к управляемым артиллерийским снарядам (УАС) с лазерной полуактивной головкой самонаведения, захватывающей подсвеченную цель на конечном участке траектории.
В качестве прототипа выбран способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения [1] [Патент RU №2247297 от 27.02.2005 г., МПК 7 F41G 5/00, 7/22 - Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения].
Способ [1] включает обнаружение цели целеуказателем, измерение расстояния от целеуказателя до цели и азимута цели относительно целеуказателя, топографическую привязку цели, целеуказателя и огневой позиции к местности, расчет установок стрельбы по координатам цели и огневой позиции, реализацию установок, производство выстрела, включение лазерного целеуказателя в режим подсвета и наведение снаряда на подсвеченную цель.
Конкретные значения установок для стрельбы определяются по таблицам стрельбы [2] исходя из топографической дальности до цели DЦ, а также метеорологических и баллистических условий стрельбы,
Wx, Wz, - средние значения скоростей продольного и бокового ветра в слое воздуха, где происходит полет снаряда,
ΔTB - среднее отклонение температуры воздуха от стандартного закона (нормальной артиллерийской атмосферы - НАА) в слое воздуха, где происходит полет снаряда,
ΔP0 - отклонение наземного атмосферного давления от стандартного (согласно НАА, 750 мм рт.ст. на уровне моря),
ΔTЗ - отклонение температуры метательного заряда от стандартной (15°С),
ΔV0 - отклонение начальной скорости снаряда из-за износа ствола орудия.
При помощи таблиц стрельбы [2] по заданным значениям метеорологических и баллистических факторов Wx, Wz, ΔTB, ΔP0, ΔTЗ, ΔV0 определяется исчисленная дальность DИ, учитывающая влияние этих факторов на дальность полета снаряда. Установки для стрельбы, соответствующие исчисленной дальности, реализуются на орудии и снаряде.
В ряде случаев применения УАС определить перечисленные выше отклонения условий стрельбы от стандартных невозможно, например:
- при эксплуатации УАС в ряде развивающихся стран ввиду отсутствия там метеорологического и баллистического обеспечения артиллерии,
- в зоне реальных боевых действий вследствие изменчивости тактической обстановки, когда средства обеспечения отстают от огневых средств,
- при выходе из строя указанных средств обеспечения.
В этих случаях условия стрельбы определяются «на глаз» аналогично глазомерной подготовке [3], что допустимо для малых дальностей стрельбы. При стрельбе на дистанции 15-20 км ошибки определения факторов «на глаз» вызывают столь большие отклонения траектории полета УАС от цели к моменту включения лазерного прибора подсветки, что подсвеченная цель может оказаться вне поля зрения головки самонаведения, то есть попадание в цель будет невозможно.
Если установлено, что при стрельбе УАС имел место полет без самонаведения, а точку разрыва удалось засечь, то в последующих выстрелах может быть введена корректура, компенсирующая промах. При этом, однако, будет потерян один или несколько (если стрельба ведется из нескольких орудий) управляемых снарядов, стоимость каждого из которых в десятки раз превышает стоимость обычного неуправляемого боеприпаса.
Задачей предлагаемого изобретения является повышение вероятности попадания снаряда с лазерной полуактивной головкой самонаведения в цель при неполной информации о метеорологических и баллистических условиях стрельбы.
Решение поставленной задачи достигается за счет того, что в способе стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения, включающем обнаружение цели целеуказателем, измерение расстояния от целеуказателя до цели и азимута цели относительно целеуказателя, топографическую привязку цели, целеуказателя и огневой позиции к местности, расчет установок стрельбы по координатам цели и огневой позиции, реализацию установок, производство выстрела, включение лазерного целеуказателя в режим подсвета и наведение снаряда на подсвеченную цель, новым является то, что перед выстрелом управляемым снарядом производится выстрел штатным неуправляемым снарядом на основе глазомерной подготовки, по отклонениям точки падения штатного снаряда от расчетной точки прицеливания определяются корректуры для штатного снаряда по дальности ΔDш, и направлению Δαш и прогнозируются корректуры в дальность  и направление
и направление  для стрельбы управляемым снарядом по зависимостям:
для стрельбы управляемым снарядом по зависимостям:

где k1 и k2 - заданные функции дальности до цели управляемого снаряда DЦ и дальности до точки прицеливания штатного снаряда Dш,
при этом установки для стрельбы управляемым снарядом, определяющие движение в вертикальной плоскости, определяются по таблицам стрельбы для исчисленной дальности
а угол горизонтального наведения определяется по зависимости:
где 
 - исчисленные дальность стрельбы и доворот для управляемого снаряда, определяемые способом глазомерной подготовки,
- исчисленные дальность стрельбы и доворот для управляемого снаряда, определяемые способом глазомерной подготовки,
где Ci - обобщенное обозначение отдельных возмущающих факторов, вызывающих отклонение по дальности Wx, ΔP0, ΔTB, ΔTЗ, ΔV0 (продольный ветер, отклонение атмосферного давления от стандартного, отклонение температуры воздуха и метательного заряда от стандартных, отклонение начальной скорости), определяемых глазомерно,
dDуi - поправка в дальность полета управляемого снаряда на i-й фактор, определяемая по таблицам стрельбы,
Zу - поправка на деривацию управляемого снаряда, определяемая по таблицам стрельбы,
Wz - скорость бокового ветра, определяемая глазомерно,
dZw - поправка на боковой ветер для управляемого снаряда, определяемая по таблицам стрельбы.
Значения k1, k2, в частности, могут быть приняты исходя из обеспечения минимума дисперсии ошибки:
где dDшi, dαшi - поправки в дальность и направление штатных снарядов на i-й фактор, определяемые по таблицам стрельбы,
dαyi - поправка в направление полета управляемого снаряда на i-й фактор, определяемая по таблицам стрельбы,
Pi - обобщенное обозначение отдельных возмущающих факторов, вызывающих боковое отклонение - Wz, Δα0 (боковой ветер, погрешность ориентирования орудия),
 - дисперсии ошибок глазомерного определения условий стрельбы,
- дисперсии ошибок глазомерного определения условий стрельбы,


 - дисперсии технического рассеивания штатных снарядов по дальности и направлению, определяемые по таблицам стрельбы.
- дисперсии технического рассеивания штатных снарядов по дальности и направлению, определяемые по таблицам стрельбы.
Способ поясняется графическим материалом (фиг.1-4).
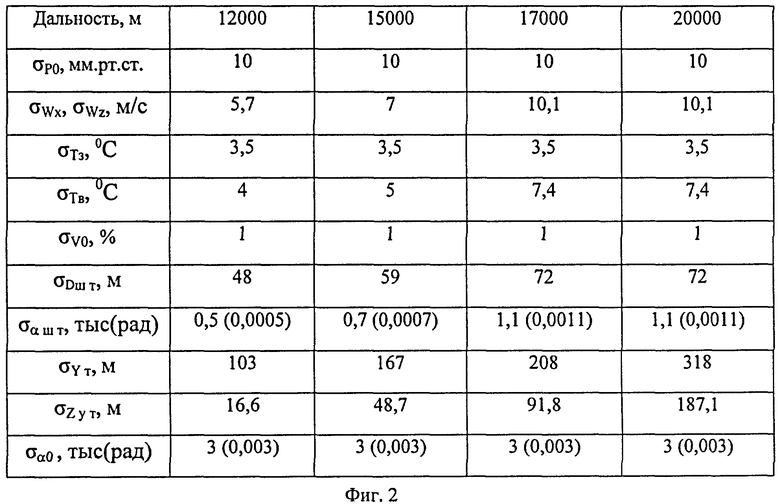
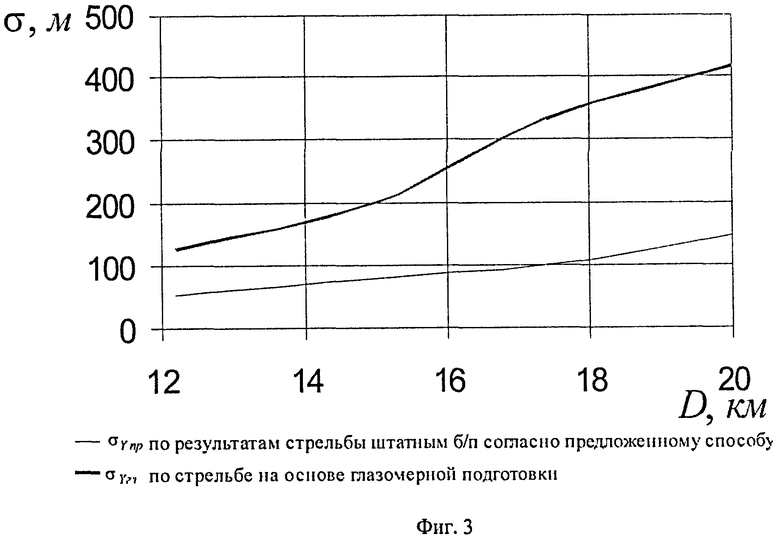
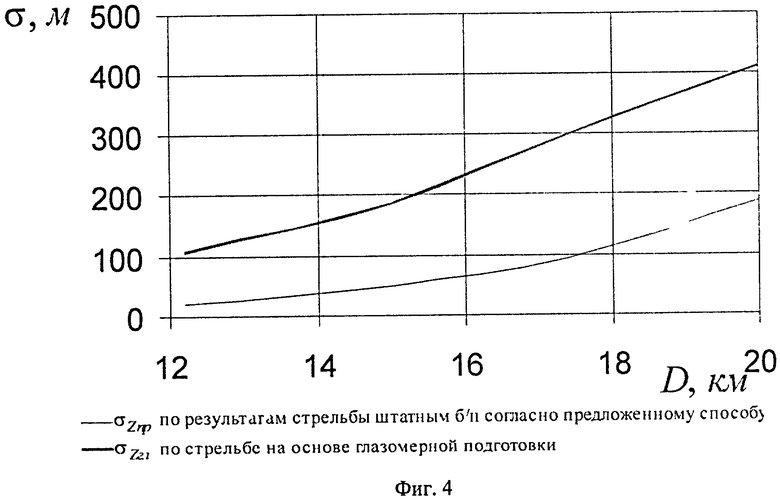
На фиг.1 показано направление осей системы координат OXYZ, на фиг.2 приведены с.к.о. условий стрельбы и технического рассеивания, на фиг.3 и 4 приведена оценка рассеивания при стрельбе предлагаемым способом по сравнению с рассеиванием при стрельбе известным способом, то есть на основе глазомерной подготовки [3] в вертикальной и в горизонтальной плоскостях соответственно.
В основе предлагаемого способа лежит тот факт, что неизвестные отклонения условий стрельбы от глазомерной оценки воздействуют как на управляемый, так и на неуправляемый боеприпас. Следовательно, имеется связь между отклонениями от цели траекторий неуправляемого ΔDш, Δαш, и управляемого ΔDy, Δαy боеприпаса. Отклонения траекторий двух типов снарядов объясняется различием их чувствительностей отклоняющего фактора. Эти различия выражаются величиной коэффициентов k1 и k2, устанавливающих соотношение между ΔDy и ΔDш, Δαy и Δαш соответственно.
Значения коэффициентов k1, и k2 могут быть найдены исходя из обеспечения минимума дисперсии ошибки прогнозирования, т.е. разности точных значений корректур ΔDy, Δαy и их прогнозируемых значений  ,
,  .
.

где 
δCi, δPi - ошибки глазомерного определения условий стрельбы.
Подставив уравнения (1) в (2), получим


где 
ΔDшт, Δαшт - отклонения по дальности и направлению, вызванные
техническим рассеиванием штатных снарядов (случайные отклонения, обусловленные индивидуальными отличиями каждого из снарядов и метательных зарядов).
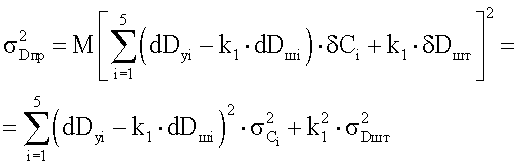
Поскольку случайные величины δCi, δPi, ΔDшт, Δαшт независимы, математические ожидания всех смешанных произведений этих величин (корреляционные моменты) равны 0 и дисперсия ошибки прогнозирования поправок по дальности предлагаемым способом запишется в виде:
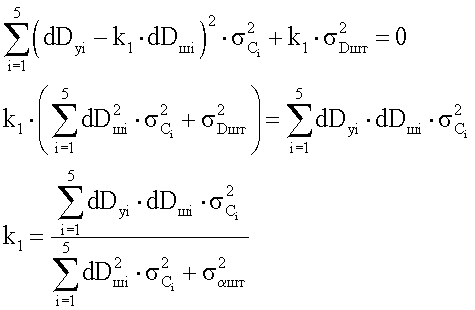
Значения k1, соответствующие минимуму дисперсии, находим, приравнивая нулю производную  по k1:
по k1:
Дисперсия ошибки по направлению имеет вид:
Значения k2 находятся аналогично k1

где  - дисперсии ошибок δPi.
- дисперсии ошибок δPi.
При стрельбе предлагаемым способом выполняются следующие действия.
1. Выстрел штатным снарядом на дальность Dш, выбираемую из условия наблюдаемости разрыва с командно-наблюдательного пункта и по возможности близкую к Dy. Расчет установок для стрельбы штатным снарядом производится способом глазомерной подготовки.
2. Засечка разрыва штатного снаряда средствами разведки, например тем же целеуказателем-дальномером, который используется для подсвета цели.
3. Определение отклонения точки разрыва штатного снаряда от точки прицеливания ΔD' ш и Δα' ш и корректур в дальность и направление ΔDш=-ΔD' ш и
Δαш=-Δα' ш.
4. Прогнозирование поправок в дальность и направление для управляемого снаряда ΔD* у и Δαу * по формуле (1).
5. Определение по таблицам стрельбы [2] установок для стрельбы управляемым снарядом, соответствующих исчисленной дальности
и угла горизонтального наведения
Сравним с.к.о. рассеивания УАС при стрельбе предлагаемым способом и на основе глазомерной подготовки.
В качестве характеристик рассеивания будем рассматривать среднеквадратические отклонения траекторий УАС в плоскости, перпендикулярной направлению полета УАС при подходе к цели в системе координат OXYZ, начало которой О - цель, ось ОХ параллельна вектору скорости УАС в момент захвата, ось OY перпендикулярна ОХ и направлена вверх, ось OZ перпендикулярна ОХ и OY. Зона выбираемых ГСН промахов УАС близка к кругу радиуса 400 м в плоскости YOZ (фиг.1).
С.к.о. рассеивания УАС при стрельбе предлагаемым способом определяется соотношениями:

где θc - угол подхода УАС к цели,
 - с.к.о. ошибки, вызванной техническим рассеиванием управляемых снарядов.
- с.к.о. ошибки, вызванной техническим рассеиванием управляемых снарядов.
С.к о. рассеивания УАС при стрельбе на основе глазомерной подготовки определяется следующими соотношениями:

Рассмотрим в качестве примера ошибки стрельбы 152-мм управляемым и неуправляемым боеприпасом в диапазоне дальностей 12-20 км.
Значения среднеквадратических ошибок глазомерной оценки факторов и технического рассеивания снарядов приведены на фиг.2.
Графики зависимости σY, σZ от дальности стрельбы D приведены на фиг.3 и 4.
Как видно на представленных фиг.3 и 4, предлагаемый способ производит уменьшение рассеивания УАС к моменту захвата цели ГСН в 3 раза в вертикальной плоскости и в 2 раза в горизонтальной плоскости. В частности, при стрельбе на максимальную дальность на основе глазомерной подготовки σYгл=418,77 м, тогда как зона выбираемого промаха (ЗВП) - круг радиуса 400 м. При этом вероятность попадания в ЗВП Р=0,371, то есть в 60% выстрелов будет получен промах, т.к. ГСН окажется не в состоянии захватить цель и выбрать промах, сформировавшийся в процессе полета УАС до момента захвата.
При стрельбе предлагаемым способом σYпр=146,52 м, а вероятность попадания в ЗВП Р=0,945, т.е. промах будет получен в 5.5% выстрелов.
Предлагаемый способ прогнозирования поправок в дальность и направление для управляемого артиллерийского снаряда по сравнению со стрельбой на основе «глазомерной подготовки» позволяет уменьшить рассеивание к моменту захвата цели ГСН за счет учета поправок, полученных в результате пристрелки штатным неуправляемым снарядом. При этом вероятность попадания УАС в цель артиллерийским управляемым снарядом с лазерной полуактивной головкой самонаведения увеличивается в ≈2,5 раза.
Источники информации
1. Патент RU №2247297 от 27.02.2005 г., МПК 7 F41G 5/00, 7/22. Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения.
2. «Таблицы стрельбы для равнинных и горных условий 152-мм самоходной гаубицы 2С3М и 152-мм пушки-гаубицы Д-20» Москва, Военное издательство, 1999 г.
3. «Правила стрельбы и управления огнем артиллерии (дивизион, батарея, взвод, орудие (ПС и УО-83)» Часть 1. Москва, Военное издательство, 1984 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300726C1 |
| Способ расчета установок стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения в условиях облачности | 2019 |
|
RU2733329C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ (ВАРИАНТЫ) | 2007 |
|
RU2347999C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2015 |
|
RU2584210C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291371C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМИ СНАРЯДАМИ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО НЕСКОЛЬКИМ ЦЕЛЯМ | 2006 |
|
RU2317504C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2359214C1 |
| Способ стрельбы управляемыми снарядами с лазерной полуактивной головкой самонаведения | 2019 |
|
RU2716462C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2012 |
|
RU2498190C1 |
| СПОСОБ УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКИМ ОРУДИЕМ ПРИ СТРЕЛЬБЕ | 2008 |
|
RU2379614C2 |
Изобретение относится к управляемым артиллерийским снарядам с лазерной полуактивной головкой самонаведения. Заявленный способ стрельбы управляемым артиллерийским снарядом заключается в расчете установок для стрельбы управляемым снарядом на основании отклонений от цели по дальности и направлению, полученных в результате выстрела штатным неуправляемым снарядом, производящегося перед стрельбой управляемым боеприпасом. Технический результат - повышение вероятности попадания управляемым артиллерийским снарядом в цель при стрельбе в отсутствие данных обо всех или части метеобаллистических условий стрельбы. 1 з.п. ф-лы, 4 ил.
1. Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения, включающий обнаружение цели целеуказателем, измерение расстояния от целеуказателя до цели и азимута цели относительно целеуказателя, топографическую привязку цели, целеуказателя и огневой позиции к местности, расчет установок стрельбы с помощью таблиц стрельбы по координатам цели и огневой позиции, реализацию установок, производство выстрела, включение лазерного целеуказателя в режим подсвета и наведение снаряда на подсвеченную цель, отличающийся тем, что перед выстрелом управляемым снарядом производят выстрел штатным неуправляемым снарядом на основе глазомерной подготовки, по отклонениям точки падения штатного снаряда от расчетной точки прицеливания определяют корректуры для штатного снаряда по дальности ΔDш и направлению Δαш и прогнозируют корректуры в дальность  и направление
и направление  для стрельбы управляемым снарядом, которые определяются по зависимостям:
для стрельбы управляемым снарядом, которые определяются по зависимостям:

где k1 и k2 - заданные функции дальности до цели управляемого снаряда Dц и дальности до точки прицеливания штатного снаряда Dш,
при этом установки для стрельбы управляемым снарядом, определяющие движение в вертикальной плоскости, определяют по таблицам стрельбы для исчисленной дальности
а угол горизонтального наведения определяют по зависимости:
где 
 - исчисленные дальность стрельбы и доворот для управляемого снаряда, определяемые способом глазомерной подготовки,
- исчисленные дальность стрельбы и доворот для управляемого снаряда, определяемые способом глазомерной подготовки,
где Ci - обобщенное обозначение отдельных возмущающих факторов, вызывающих отклонение по дальности (продольный ветер, отклонение атмосферного давления от стандартного, отклонение температур воздуха и метательного заряда от стандартных, отклонение начальной скорости), определяемых глазомерно;
dDуi - поправка в дальность полета управляемого снаряда на i-й фактор, определяемая по таблицам стрельбы;
Zу - поправка на деривацию управляемого снаряда, определяемая по таблицам стрельбы;
Wz - скорость бокового ветра, определяемая глазомерно;
dZw - поправка на боковой ветер для управляемого снаряда, определяемая по таблицам стрельбы.
2. Способ по п.1, отличающийся тем, что значения k1, k2 приняты исходя из обеспечения минимума дисперсии ошибки:
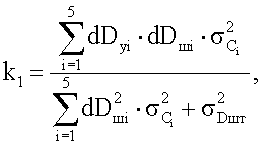
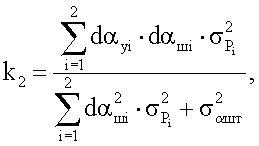
где dDшi, dαшi - поправки в дальность и направление штатных снарядов на i-й фактор, определяемые по таблицам стрельбы;
dαyi - поправка в направление полета управляемого снаряда на i-й фактор, определяемая по таблицам стрельбы;
Pi - обобщенное обозначение отдельных возмущающих факторов, вызывающих боковое отклонение (боковой ветер, погрешность ориентирования орудия);

 - дисперсии ошибок глазомерного определения условий стрельбы, принимается
- дисперсии ошибок глазомерного определения условий стрельбы, принимается

 ,
, 
 ,
, 

 - дисперсии технического рассеивания штатных снарядов по дальности и направлению, определяемые по таблицам стрельбы.
- дисперсии технического рассеивания штатных снарядов по дальности и направлению, определяемые по таблицам стрельбы.
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300726C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| JP 4055697 A, 24.02.1992 | |||
| GB 1424299 A, 11.02.1976 | |||
| Гидросистема | 1984 |
|
SU1326791A1 |

