Изобретение относится к области электросвязи и может быть использовано в телекоммуникационных линиях двусторонней связи.
Известны адаптивные эхокомпенсаторы, описанные, например, в ЕР №0412691 А2 от 13.02.91 с приоритетом от 07.08.89; в патенте США №4964118 от 16.10.1990 г.
Адаптивный эхокомпенсатор по заявке ЕР №0412691 состоит из первого блока разделения первичного сигнала на совокупность сигналов, разделенных в пределах спектра первичного сигнала, и второй блок, выполняющий, аналогично первому блоку, функцию с вторичным сигналом. Также эхокомпенсатор включает множество адаптивных фильтров, рассчитанных на первичный и вторичный сигналы и обеспечивающих генерацию сигнала ошибки.
Недостатком данного фильтра является относительно высокий уровень нескомпенсированного эхосигнала.
Адаптивный эхокомпенсатор по пат. США №4964118 состоит из первого и второго канальных фильтров, обеспечивающих подавление эхосигнала за счет генерации компенсирующих сигналов. Эхокомпенсатор генерирует компенсирующий сигнал в соответствии с заданной функцией, позволяющей снижать его по экспоненциальному закону.
Недостатком данного аналога является относительно высокий уровень нескомпенсированного эхосигнала.
Наиболее близким по своей технической сущности к заявленному является адаптивный эхокомпенсатор по авт.св. СССР №1436277, МПК Н04В 3/20, опубл. 7.11.1988, Бюл. №41. Ближайший аналог состоит из М≥2 канальных фильтров (КФ), N-отводной линии задержки (NO ЛЗ), сумматора, усилителя, блока вычитания. Каждый КФ содержит первый и второй перемножители, канальный сумматор (КС), канальный интегратор и канальную N-отводную ЛЗ.
В ближайшем аналоге речевой сигнал дальнего абонента после обработки и его сравнения с остаточным сигналом формируется сигнал оценки импульсной характеристики пути эха и формируется оценка эхосигнала на основе текущей оценки функции взаимной корреляции формируемых сигналов с учетом значений импульсной характеристики пути эха.
Однако прототип имеет недостатки:
недостаточный уровень подавления эхосигнала, что обусловлено линейной зависимостью обратной связи от сигнала ошибки и фиксированным уровнем ограничения амплитуды формируемого сигнал.
Техническим результатом от использования заявленного устройства является разработка адаптивного эхокомпенсатора, обеспечивающего более глубокое подавление эхосигнала во всем диапазоне речевого спектра за счет более точной сходимости и итерационного процесса компенсации эхосигнала.
Заявленное устройство расширяет арсенал средств данного назначения.
Поставленная цель достигается тем, что в известный адаптивный эхокомпенсатор (АЭК), содержащий М≥2 КФ, N-отводную ЛЗ, где N=М-1, вход которой является входом «сигнал дальнего абонента» (СДА) АЭК, М-входовый сумматор (МВх.СУМ), выход которого подключен к выходу блока вычитания (БВ), второй вход и выход которого являются соответственно входом «отраженный сигнал» (Вх. ОтС) и выходом «сигнал ошибки» (вых.СО), n-й отвод NO ЛЗ, где n=1,2,…, N, подключен к сигнальному входу (n+1)-го КФ, а сигнальный вход первого КФ подключен к входу NO ЛЗ, сигнальный выход m-го КФ, где m=1, 2,…,М, подключен к m-му входу МВх.СУМ, дополнительно введен блок адаптивного управления (БАУ). БАУ снабжен М-разрядными сигнальным входом (МР СВх.), входом «обучающий сигнал» (МР Вх. ОбС), выходом «сигнал моделирующих коэффициентов (МР Вых. СМК) и выходом «сигнал коррекции» (МР Вых. СК).
К сигнальному входу m-го КФ подключен m-й разряд МР СВх. БАУ, а m-е разряды МР Вых. СМК, МР Вых. СК и МР Вх.ОбС БАУ подключены соответственно к входам «сигнал моделирующих коэффициентов» (Вх. СМК) и «сигнал коррекции» (Вх. СК) и к выходу «обучающий сигнал» (Вых. ОбС) m-го КФ. БАУ снабжен дополнительным входом «сигнал ошибки» (Вх. СО), который подключен к Вых. СО БВ, являющегося выходом АЭК.
КФ состоит из первого, второго и третьего умножителей (УМ), первого и второго сумматоров (СУМ), канальной линии задержки (КЛЗ). Первый вход первого УМ является сигнальным входом КФ. Выход первого УМ является сигнальным входом КФ. Выход первого УМ подключен к первому входу первого СУМ, второй вход которого подключен к выходу третьего УМ. Выход второго УМ подключен к первому входу третьего УМ и второму входу второго СУМ, первый вход которого подключен к выходу первого СУМ. Выход второго СУМ подключен к входу КЛЗ и является сигнальным выходом КФ. Выход КЛЗ подключен к первому входу второго УМ и является выходом «обучающий сигнал» (Вых. ОбС) КФ. Второй вход второго УМ является Вх.СК КФ. Второй вход третьего УМ является Вх.СМК КФ.
БАУ состоит из первого и второго формирований весовых коэффициентов (ФВК), первого и второго корректоров весовых коэффициентов (КВК), формирователей прямого сигнала (ФПС) и сигнала обратной связи (ФСОС). М-разрядные входы ФПС и ФСОС являются М-разрядными соответственно сигнальным входом и Вх.ОбС БАУ. М-разрядный вход ФПС подключен к М-разрядному входу первого ФВК. Выход ФПС подключен к первому входу первого КВК, выход которого подключен к входу «коррекция» первого ФВК. М-разрядный выход первого ФВК является МР Вых.СМК БАУ. М-разрядный вход ФСОС подключен к М-разрядному входу второго ФВК. М-разрядный выход второго ФВК является МР Вых. СК БАУ. Выход ФСОС подключен к первому входу второго КВК, выход которого подключен к входу «коррекция» второго ФВК. Вторые входы первого и второго КВК объединены и являются Вх. СО БАУ.
Благодаря указанной новой совокупности существенных признаков в заявленном устройстве обеспечивается адаптивное регулирование весовых коэффициентов в реальном масштабе времени, что в свою очередь обусловливает более точное формирование компенсирующего сигнала, и, следовательно, более глубокое подавление эхосигнала.
Заявленное устройство поясняется чертежами, на которых показано:
на фиг.1 - общая структурная схема адаптивного эхокомпенсатора;
на фиг.2 - структурная схема канального фильтра;
на фиг.3 - структурная схема блока адаптивного управления;
на фиг.4 - алгоритм работы блока адаптивного управления.
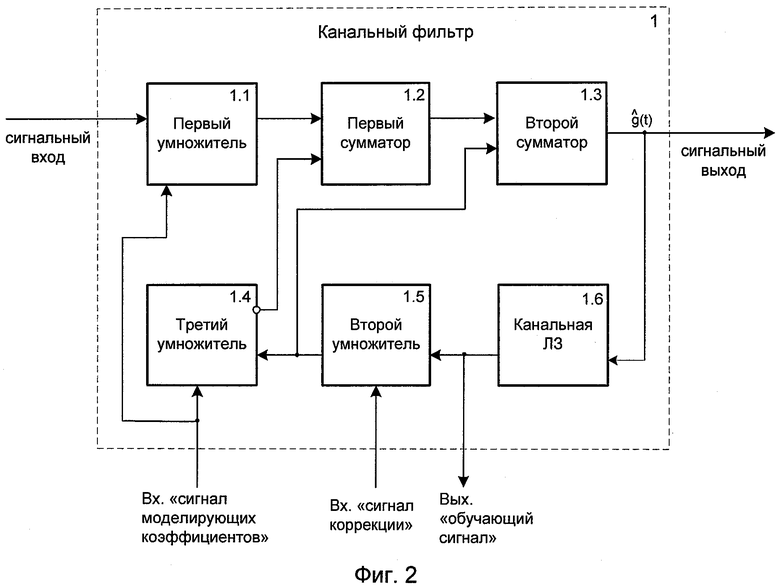
Адаптивный эхокомпенсатор, показанный на фиг.1, состоит из М≥2 КФ 11, 12, …1M, NO ЛЗ 2, МВх. СУМ 3, БВ 4 и БАУ 5. Вход NO ЛЗ 2 подключен к сигнальному входу первого (m=1) КФ 11 и является Вх.СДА АЭК. Сигнальный вход (n+1)-го КФ 1(n+1) подключен к n-му отводу NO ЛЗ 2 и (n+1)-му разряду МР СВх. БАУ. Причем первый разряд (m=1) МР СВх. БАУ 5 подключен к входу NO ЛЗ 2. Сигнальный выход m-го КФ 1m подключен к m-му входу МВх.СУМ 3, выход которого подключен к первому входу БВ 4. Второй вход БВ 4 является Вх. ОтС АЭК. Выход БВ 4 подключен к Вх.СО БАУ 5 и является Вых. СО АЭК. Вход СМК, вход СК и выход ОбС m-го КФ 1m подключены к m-ым разрядам соответственно МР Вых. СМК, МР Вых. СК и МР Вх. ОбС БАУ 5.
Канальные фильтры 11-1M предназначены для моделирования упреждающего речевого эхосигнала.
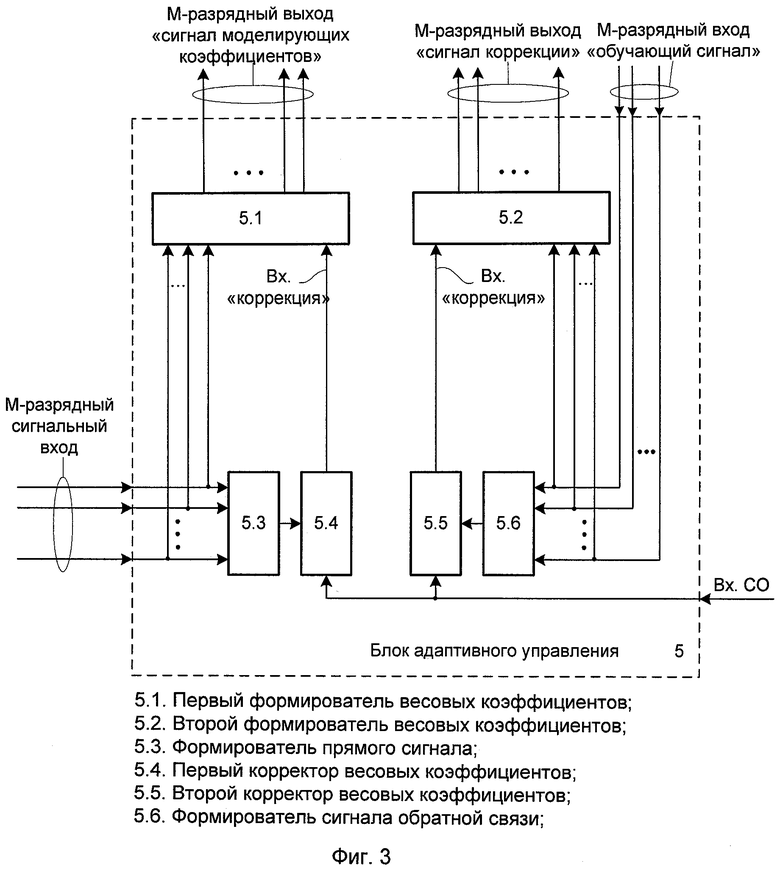
Каждый канальный фильтр 1 выполнен в соответствии с моделью речевого сигнала, в частности, как показано на фиг.2. КФ 1 состоит из первого 1.1., второго 1.5 и третьего 1.4 УМ, первого 1.2 и второго 1.3 СУМ, а также КЛЗ 1.6. Первый вход первого УМ 1.1 является сигнальным входом КФ 1. Выход первого УМ 1.1 подключен к первому входу первого СУМ 1.2, второй вход которого подключен к инверсному выходу третьего УМ 1.4. Выход второго УМ 1.5 подключен к первому входу третьего УМ 1.4 и второму входу второго СУМ 1.3. Первый вход второго СУМ 1.3 подключен к выходу первого СУМ 1.2. Выход второго СУМ 1.3 подключен к входу КЛЗ 1.6 является сигнальным выходом КФ 1. Выход КЛЗ 1.6 подключен к первому входу второго УМ 1.5 и является Вых. ОбС КФ 1. Второй вход второго УМ 1.5 является Вх.СК КФ 1, а второй вход третьего УМ 1.4 является входом СМК КФ 1.
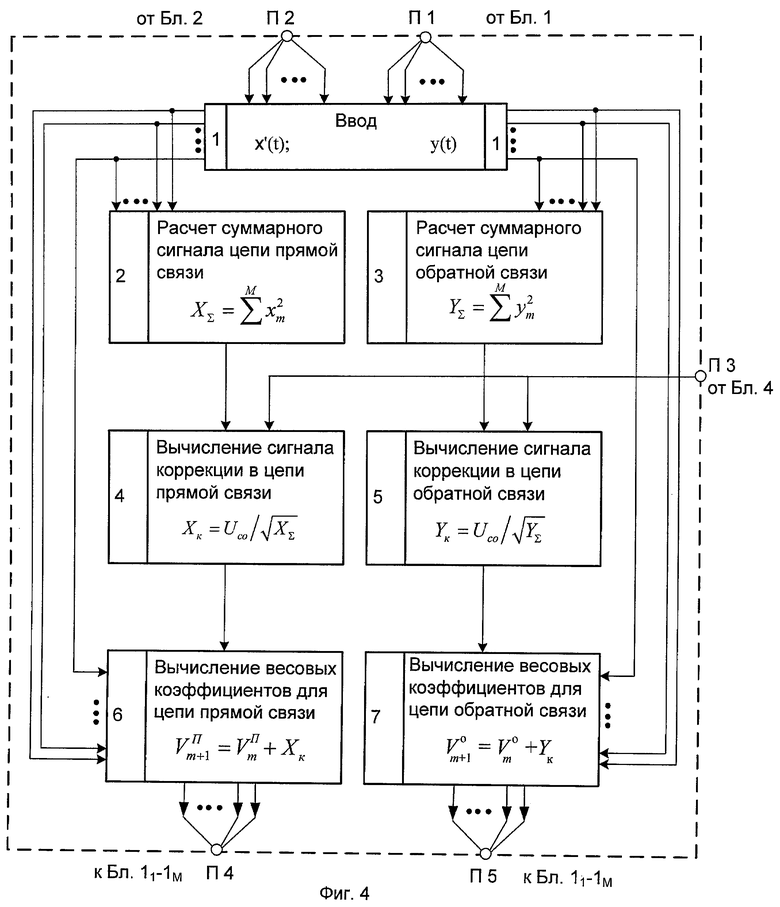
БАУ 5 предназначен для расчета и формирования весовых коэффициентов для каждого канального фильтра по цепям прямой и обратной связи. БАУ 5, в частности, может быть реализован как показано на фиг.3. БАУ 5 состоит из первого 5.1 и второго 5.2 ФВК, первого 5.4 и второго 5.5 КВК, ФПС 5.3 и ФСОС 5.6. М-разрядные входы ФПС 5.3 и ФСОС 5.6 являются соответственно М-разрядным сигнальным входом и МР Вх. ОбС БАУ 5. М-разрядный вход ФПС 5.3 подключен к М-разрядному входу первого ФВК 5.1, а выход ФПС 5.3 подключен к первому входу первого КВК 5.4, выход которого подключен к входу «коррекция» первого ФВК 5.1. М-разрядный выход первого ФВК 5.1 является МР Вых. СМК БАУ 5, М-разрядный вход ФСОС 5.6 подключен к М-разрядному входу второго ФВК 5.2. М-разрядный выход второго ФВК 5.5 является МР Вых. СК БАУ 5. Выход ФСОС 5.6 подключен к первому входу второго КВК 5.5., выход которого подключен к входу «коррекция» второго ФВК 5.2. Вторые входы первого 5.4 и второго 5.5. КВК объединены и являются Вх. СО БАУ 5.
Входящие в БАУ 5 элементы имеют следующее назначение.
Первый 5.1 и второй 5.2 ФВК предназначены для вычисления весовых коэффициентов  и
и  в цепях соответственно прямой и обратной связи для каждого m-го канального фильтра в период времени выборки Т.
в цепях соответственно прямой и обратной связи для каждого m-го канального фильтра в период времени выборки Т.
Первый 5.4 и второй 5.5 КВК предназначены для вычисления в каждый период выборки Т сигналов коррекции Хк и Yк соответственно для цепи прямой и обратной связи с учетом остаточного уровня отраженного сигнала (сигнала ошибки) Uco.
ФПС 5.3 и ФСОС 5.6 предназначены для расчета суммарных сигналов ХΣ и YΣ соответственно по цепям прямой и обратной связи в каждый временной период выборки Т.
Другие элементы, входящие в общую схему АЭК и схему КФ 1, известны и описаны, например, в книге Уидроу Б., Стирнз С. «Адаптивная обработка сигналов». Пер. с англ. // М.: «Радио и связь», 1989 г., 440 с. или Chao J., Shigeo Т. A new IIR adaptive echo canceler: GIVE., IEEE journal on selected areas in communications, vol.12, no.9, december 1994.
БАУ 5 может быть реализован также в виде процессора, алгоритм работы которого показан на фиг.4. Порты П 1 и П 2 соответствуют МРСВх и МРВх ОбС БАУ 5.
При поступлении на эти порты сигналов по цепям соответственно прямой и обратной связи происходит вычисление их суммарных значений ХΣ и YΣ (блоки 2 и 3 алгоритма). Затем с учетом поступающего на порт П 3 от БВ 4 сигнала ошибки происходит вычисление сигналов коррекции Хк и Yк соответственно для цепи прямой и обратной связи (блоки 4, 5 алгоритма). Затем по методу наименьших квадратов происходит вычисление весовых коэффициентов для цепей прямой VП и обратной VO связи для каждого m-го КФ 1, которые через порты П 4 и П 5 процессора поступают на Вх СМК и Вх СК каждого m-го КФ 1.
Заявленное устройство работает следующим образом.
Речевой Вх. СДА x(t) (см. фиг.1) поступает на вход NO ЛЗ 2, на сигнальный вход первого КФ 11 и на первый разряд МРС Вх.БАУ 5. На сигнальные входы остальных КФ 1 сигналы поступают от n-го отвода NO ЛЗ 2 на сигнальный вход (n+1)-го КФ, с достижением задержки между n-м и (n+1)-ым отводами NO ЛЗ 2 на время Т.
На второй вход первого УМ 1.1 (см. фиг.2) с БАУ 5 поступает вычисленный весовой коэффициент. На выходе второго СУМ 1.3 формируется сигнальная оценка импульсной характеристики пути эха x'(t). Сигнал x'(t) с сигнального выхода КФ 1 поступает на соответствующий вход М-входового сумматора 3 (фиг.1) и на вход КЛЗ 1.6 (фиг.2), с выхода которой поступает на первый вход второго УМ 1.5 и на Вых. ОбС КФ 1. Сигнал с Вых. ОбС КФ поступает на соответствующий разряд МР Вх.ОбС БАУ 5. Вычисленный коэффициент усиления от соответствующего разряда МР Вых.СК поступает на вторые входы второго 1.5 и первого 1.1 УМ КФ 1. С выхода второго УМ 1.5 скорректированный сигнал импульсной характеристики поступает на первый вход третьего УМ 1.4 и на второй вход второго СУМ 1.3. На второй вход третьего УМ 1.4 КФ 1 от соответствующего разряда МР Вых.СМК БАУ 5 поступает вычисленный весовой коэффициент. В результате вторичной корректировки импульсной характеристики в третьем УМ 1.4 сформированный сигнал с инверсного выхода третьего умножителя 1.4 поступает на второй вход первого СУМ 1.2. Сигналы с сигнальных выходов всех М СУМ 11-1m поступают на соответствующие М входы М-входового СУМ 3, на выходе которого формируется прогнозируемая оценка отраженного сигнала y'(t). С выхода М Вх.Сум сигнал y'(t) поступает на первый вход БВ 4, на второй вход которого поступает эхосигнал y(t), подлежащий подавлению. Сигнал ошибки e(t) с выхода БВ 4 поступает на Вх.СО БАУ 5 и на выход АЭК. Таким образом сигнал оценки импульсной характеристики пути эха формируется не только на основе текущих оценок сигналов x(t) и e(t), но и с учетом значений импульсной характеристики пути эха, полученных на М предшествующих шагах настройки. Этим достигается прогноз значений оценки сигнала x(t) в момент времени t на основе известных его значений в М предшествующих моментов времени x(t-T), x(t-2T), …, x(t-MT). Весовые коэффициенты усиления, поступающие от соответствующих разрядов МР Вых.СМК и МР Вых.СК БАУ 5 на Вх. СМК и Вх. СК КФ 1, являются фактически прогнозными, и значения которых определяются в реальном масштабе времени с помощью метода наименьших квадратов на основе использования точного определения уровня сигнала x(t) в виде матрицы Х и сигнала e(t).
Таким образом для каждого КФ 1 достигается устойчивая обратная связь, быстрая сходимость аппроксимации эхосигнала с высокой точностью и соответственно с большой глубиной его подавления. При этом обеспечивается сохранение всех характеристик основного речевого сигнала, передаваемого по каналу связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЭХОКОМПЕНСАТОР НА РЕКУРСИВНОМ ФИЛЬТРЕ | 2009 |
|
RU2412546C1 |
| АДАПТИВНЫЙ ЭХОКОМПЕНСАТОР НА РЕКУРСИВНОМ ФИЛЬТРЕ М-ГО ПОРЯДКА | 2009 |
|
RU2407148C1 |
| ПРИЕМОПЕРЕДАЮЩАЯ АНТЕННАЯ СИСТЕМА | 2019 |
|
RU2706914C1 |
| Адаптивный эхокомпенсатор | 1987 |
|
SU1436277A1 |
| ДИСКРЕТНЫЙ СОГЛАСОВАННЫЙ ФИЛЬТР | 2005 |
|
RU2310978C2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1979 |
|
SU1840116A2 |
| Цифровая адаптивная многолучевая антенная система | 1988 |
|
SU1633472A1 |
| Адаптивный эхокомпенсатор | 1989 |
|
SU1665520A1 |
| ЧЕТЫРЕХПРОВОДНАЯ ЦИФРОВАЯ СИСТЕМА ПЕРЕДАЧИ | 2002 |
|
RU2260909C2 |
| Устройство распознавания изображений | 1989 |
|
SU1674153A1 |
Изобретение относится к области электросвязи и может быть использовано в телекоммуникационных линиях двухсторонней связи. Техническим результатом является более глубокое подавление эхосигнала во всем диапазоне речевого спектра. Адаптивный эхокомпенсатор (АЭК) состоит из N≥2 канальных фильтров (КФ) (1), N-отводной линии задержки (ЛЗ) (2), М-входового сумматора (МВх.СУМ) (3), блока вычитания (БВ) (4) и блока адаптивного управления (БАУ) (5). В АЭК формируют цепи прохождения прямого и обратного сигналов (эха), вычисляют прогнозное значение уровня сигнала, на основании чего методом наискорейшего спуска вычисляют корректирующие весовые коэффициенты для более глубокого подавления эхосигнала. 2 з.п. ф-лы, 4 ил.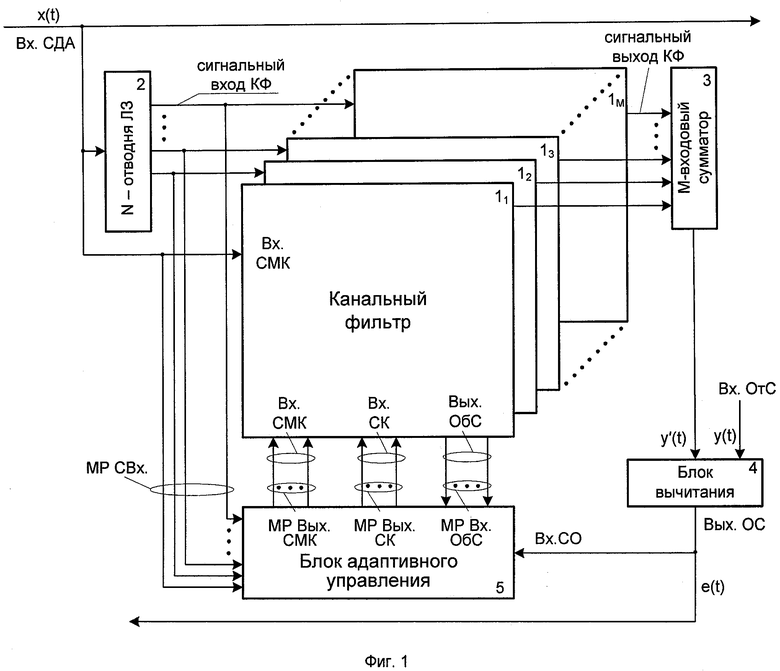
1. Адаптивный эхокомпенсатор, содержащий М≥2 канальных фильтров, N-отводную линию задержки, где N=M-1, вход которой является входом «сигнал дальнего абонента» адаптивного эхокомпенсатора, М-входовый сумматор, выход которого подключен к входу блока вычитания, второй вход и выход которого являются соответственно входом «отраженный сигнал» и выходом «сигнал ошибки», n-й отвод N-отводной линии задержки, где n=1, 2,…, N, подключен к сигнальному входу (n+1)-го канального фильтра, а сигнальный вход первого канального фильтра подключен к входу N-отводной линии задержки, сигнальный выход m-го канального фильтра подключен к m-му входу М-входового сумматора, где m=1, 2,…, М, отличающийся тем, что дополнительно введен блок адаптивного управления, снабженный М-разрядными сигнальным входом, входом «обучающий сигнал», выходом «сигнал моделирующих коэффициентов» и выходом «сигнал коррекции», m-й разряд М-разрядного сигнального входа блока адаптивного управления подключен к сигнальному входу m-го канального фильтра, а m-е разряды М-разрядных выходов «сигнал моделирующих коэффициентов» и «сигнал коррекции» блока адаптивного управления подключены соответственно к входам «сигнал моделирующих коэффициентов» и «сигнал коррекции» m-го канального фильтра, причем блок адаптивного управления снабжен дополнительным входом «сигнал ошибки», который подключен к выходу блока вычитания.
2. Адаптивный эхокомпенсатор по п.1, отличающийся тем, что канальный фильтр состоит из первого, второго и третьего умножителей, первого и второго сумматоров и канальной линии задержки, первый вход первого умножителя является сигнальным входом канального фильтра, выход первого умножителя подключен к первому входу первого сумматора, второй вход которого подключен к инверсному выходу третьего умножителя, выход второго умножителя подключен к первому входу третьего умножителя и второму входу второго сумматора, первый вход которого подключен к выходу первого сумматора, выход второго сумматора подключен к входу канальной линии задержки и является сигнальным выходом канального фильтра, выход канальной линии задержки подключен к первому входу второго умножителя и является выходом «обучающий сигнал» канального фильтра, второй вход второго умножителя является входом «сигнал коррекции» канального фильтра, а вторые входы первого и третьего умножителей являются входом «сигнал моделирующих коэффициентов» канального фильтра.
3. Адаптивный эхокомпенсатор по п.1, отличающийся тем, что блок адаптивного управления состоит из первого и второго формирователей весовых коэффициентов, первого и второго корректоров весовых коэффициентов, формирователя прямого сигнала и формирователя сигнала обратной связи, М-разрядные входы формирователя прямого сигнала и формирователя сигнала обратной связи являются М-разрядными соответственно сигнальным входом и входом «обучающий сигнал» блока адаптивного управления, М-разрядный вход формирователя прямого сигнала подключен к М-разрядному входу первого формирователя весовых коэффициентов, выход формирователя прямого сигнала подключен к первому входу первого корректора весовых коэффициентов, выход которого подключен к входу «коррекция» первого формирователя весовых коэффициентов, М-разрядный выход которого является М-разрядным выходом «сигнал моделирующих коэффициентов» блока адаптивного управления, М-разрядный вход формирователя сигнала обратной связи подключен к М-разрядному входу второго формирователя весовых коэффициентов, М-разрядный выход которого является М-разрядным выходом «сигнал коррекции» блока адаптивного управления, выход формирователя сигнала обратной связи подключен к первому входу второго корректора весовых коэффициентов, выход которого подключен к входу «коррекция» второго формирователя весовых коэффициентов, причем вторые входы первого и второго корректоров весовых коэффициентов объединены и являются входом «сигнал ошибки» блока адаптивного управления.
| Адаптивный эхокомпенсатор | 1987 |
|
SU1436277A1 |
| СЕТЕВОЙ ЭХОПОДАВИТЕЛЬ | 1993 |
|
RU2109408C1 |
| СПОСОБ ПОДАВЛЕНИЯ ЭХО-СИГНАЛОВ АДАПТИВНЫМ ДВОЙНЫМ ФИЛЬТРОМ | 1996 |
|
RU2175814C2 |
| US 4964118 A, 16.10.1990 | |||
| US 6510313 B1, 21.01.2003 | |||
| US 5224122 A, 29.06.1993. | |||

