Изобретение относится к области обувной промышленности, а именно к устройствам противоскольжения обуви.
Уровень техники. Наиболее близким по технической сущности является выбранная за прототип конструкция обуви с шипами, перемещающимися из исходного в рабочее положение с помощью центрального исполнительного механизма, закрепленного на обуви. Шипы располагаются в индивидуальных функциональных блоках, в которых осуществляют возвратно-поступательно движение с помощью компактной ленточной передачи, приводимой в действие вручную носчиком обуви (DE 102006028666 A1, 2007.12.27, A43 15/00 (2006.01), патент).
Причины, препятствующие получению требуемого результата. Прототип имеет недостаток, заключающийся в том, что шипы переводятся в рабочее положение вручную, величина выхода шипа над ходовой поверхностью не регулируется по высоте, что необходимо делать для повышения устойчивости ходьбы при изменении поверхности опоры, например, если она представляет собой твердый лед в мороз, утоптанный снег или рыхлый лед в оттепель. В прототипе для совершения операции перевода шипов в рабочее положение носчику необходимо присесть, наклониться вперед к ноге, дотянуться руками до рычага и повернуть рычаг механизма перевода шипов в активное положение, при этом следует приложить определенные физические усилия, что бывает затруднительно, особенно инвалидам и пожилым людям, и найти место на улице, чтобы сидя проделать все манипуляции. В противном случае, т.е. не в положении сидя, выполнить эти действия стоя, балансируя на одной ноге, пожилому человеку или инвалиду просто невозможно. При этих манипуляциях пачкаются руки или перчатки, что создает неудобство в использовании такой обуви. Если вывести шипы на обуви в рабочее положение в помещении, то появляется опасность скольжения стальными шипами по каменной лестнице, что может привести к травме носчика.
Технический результат
Использование предлагаемого изобретения позволяет повысить удобство приведения в действие механизма противоскольжения, используя дистанционное управление, а также увеличить надежность сцепления шипов с опорной поверхностью за счет перемещения их на различную высоту. Дистанционный управляющий блок дает возможность автоматически выводить шипы над поверхностью каблука с помощью управляющего блока, шагового двигателя, поводкового и кулачкового механизмов, перемещающих вверх-вниз шипы-толкатели. Все это повышает удобство противоскользящей обуви и делает обувь, оснащенную таким устройством, более устойчивой при взаимодействии с различными опорными поверхностями. Устройство компактно и может быть вмонтировано в каблук средней высоты (30-40 мм).
Термин шип-толкатель введен по следующим соображениям:
- шип - его функциональное назначение - обеспечивать противоскользящие свойства обуви;
- толкатель - это составная часть кулачкового механизма, приводимая в возвратно- поступательные движения кулачком.
Так как в предлагаемом устройстве шип и толкатель выполнены одной деталью, им присвоено наименование шип-толкатель.
Осуществление изобретения. Устройство противоскользящей каблучной части обуви с дистанционным управлением перемещения шипов имеет установленные в полостях каблучной части обуви шипы-толкатели, помещенные в индивидуальных функциональных блоках, механизм подъема и опускания шипов. Для приведения в действие механизма подъема и опускания шипов-толкателей применяется автономный дистанционный управляющий блок в виде брелка, передающий радиосигнал подъема/опускания шипов-толкателей на управляющий блок, помещенный в каблучную часть обуви, содержащий антенну, преобразователь принятого сигнала в управляющий сигнал для шагового двигателя, источник питания как самого управляющего устройства, так и шагового двигателя, последний, получая управляющий сигнал и электропитание, предназначен для поворота закрепленного строенного поводка, который жестко соединен с плоскими кулачками, выполняющими функцию подъема/опускания подпружиненных шипов-толкателей, при этом устройство может осуществлять реверсное движение.
В предлагаемом устройстве противоскользящей каблучной части обуви имеется каблук, состоящий из набоечной и основной частей, в последней имеется набор полостей (несквозных отверстий), в одной из этих полостей располагается управляющий блок с антенной, принимающей сигнал автономного дистанционного управляющего блока, с преобразователем сигналов и источником электропитания для шагового двигателя, который располагается в другой полости основной части каблука, также в основной части каблука имеются три секторного вида полости, где размещаются три рычага строенного поводка, соединенного с шаговым двигателем, и три плоских кулачка, приводящие в возвратно-поступательное движение три шипа-толкателя; при этом в набоечной части имеются три сквозных отверстия для размещения трех овальных корпусов шипов-толкателей, в каждом из которых находится овальный пустотелый цилиндр, где размещаются шип-толкатель и возвратные пружины двух направляющих для устойчивого движения шипа-толкателя.
В предлагаемом устройстве перемещение шипов-толкателей осуществляется за счет ступенчатой криволинейной поверхности плоских кулачков, на которых имеются участки подъема/опускания и плоские участки, последние предназначены для устойчивой опоры шипов-толкателей при установке их на определенную высоту и восприятия усилий от ледяной или снежной поверхностей. Под плоскими кулачками по линиям их дугового перемещения находятся жесткие пластины, служащие для обеспечения движения плоских кулачков с минимальными потерями на трение, а также, для надежной устойчивой опоры плоских кулачков при их нагружении со стороны шипов-толкателей в процессе ходьбы.
Сущность изобретения
Изобретение направлено на решение задачи дистанционным управлением выхода шипов над ходовой поверхностью каблука и регулирования их высоты в диапазоне 1-3 мм для придания лучших свойств противоскольжения низа обуви при различных характеристиках опорной поверхности.
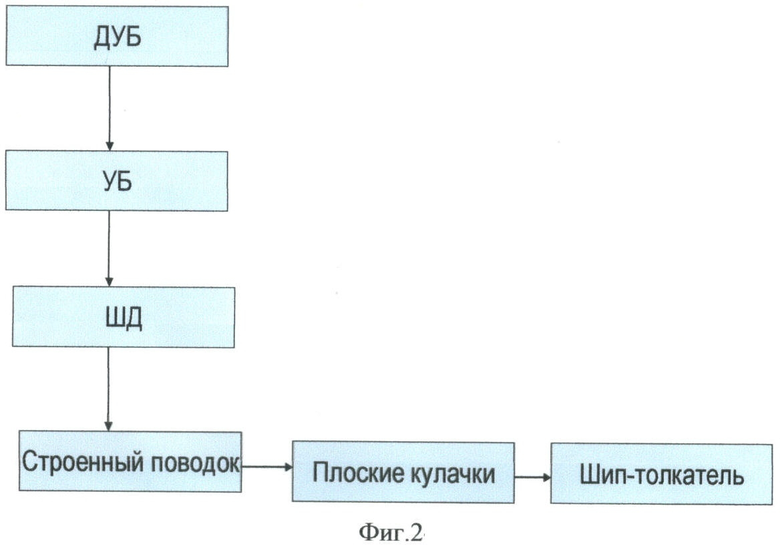
Предлагаемое устройство противоскольжения состоит из последовательно соединенных блоков и механизмов:
- дистанционный управляющий блок (ДУБ);
- управляющий блок (УБ);
- шаговый двигатель (ШД);
- поводковый механизм;
- кулачковый механизм;
- блок шипов-толкателей.
ДУБ, выполненный в форме брелка, имеет две кнопки управления, при нажатии соответствующей кнопки ДУБ передает сигнал на УБ, который воспринимает сигнал и передает его на ШД, заставляя поворачивать вал последнего на определенный угол. Вал ШД жестко соединен со строенным поводком, поворачивающимся и тем самым приводящим в дуговое движение соответствующие три плоских кулачка, с профилированной ступенчатой рабочей поверхностью у каждого кулачка. Плоские кулачки сообщают возвратно-поступательные движения трем шипам-толкателям в соответствии с записанной на их профилях программой. Возвратное движение шипов-толкателей осуществляется за счет возвратных пружин, что происходит при реверсном движении вала ШД и соответственно строенного поводка и трех кулачков.
Команда на реверс подается с ДУБа на УБ при нажатии второй кнопки.
Шипы-толкатели располагаются в теле каблука, так как при переднем толчке в наиболее опасной его фазе, когда кости голени и бедра спрямлены, реакция от основания передается со значительным усилием, что порождает существенный момент проскальзывания, который компенсируется шипами-толкателями каблука. Шипы-толкатели увеличивают сцепление со скользкой поверхностью за счет продавливания водяной пленки на опорной поверхности и внедрения в лед или утоптанный снег. Изменяя высоту выступающей части шипов-толкателей можно подобрать лучшие условия взаимодействия их со скользкой поверхностью.
Существенным отличием предлагаемого изобретения является перемещение шипов-толкателей при помощи ШД, поворачивающего строенный поводок, что вызывает дуговое перемещение кулачков, которые в свою очередь передают вертикальное движение возвратно-поступательно перемещающимся по их криволинейным ступенчатым поверхностям трем шипам-толкателям. Включение и выключение ШД осуществляется дистанционно по сигналу с ДУБа.
Высота выступающей части шипа-толкателя в зависимости от вида скользкой поверхности может регулироваться с помощью набора сигналов, поступающих с ДУБа на УБ, включающий ШД для отработки заданных углов поворота строенного поводка кулачкового механизма и подъема шипа-толкателя над ходовой поверхностью каблука.
Каблук состоит из набоечной и основной частей. В основной части каблука имеется набор полостей (несквозных отверстий). В одной полости каблука располагается УБ с антенной, принимающей сигнал с ДУБа. В УБ имеется также преобразователь сигнала и источник электропитания для ШД. В другой полости каблука располагается ШД, поворачивающий на заданный угол строенный поводок трех плоских кулачков. Имеются также три полости в основной части каблука, в которых располагаются три рычага строенного поводка и три плоских кулачка. В теле набойки имеются три сквозных отверстия, где и размещаются три овальных корпуса, в каждом из них помещается шип-толкатель, возвратные пружины, направляющие для шипа-толкателя и овальный полый цилиндр для шипа-толкателя и пружин.
Перечень чертежей
На фиг.1 изображен каблук, в который вмонтировано устройство противоскольжения, включающее УБ, строенный поводок, закрепленный на валу ШД, три плоских кулачка с подпружиненными шипами-толкателями и направляющими.
На фиг.1а - вид сбоку каблука в продольном разрезе.
На фиг.1б - вид сверху каблука.
На фиг.1в - разрез по ВВ на фиг.1а.
На фиг.1г - разрез ББ на фиг.1б.
На фиг.2 показана блок-схема управления движением шипов-толкателей.
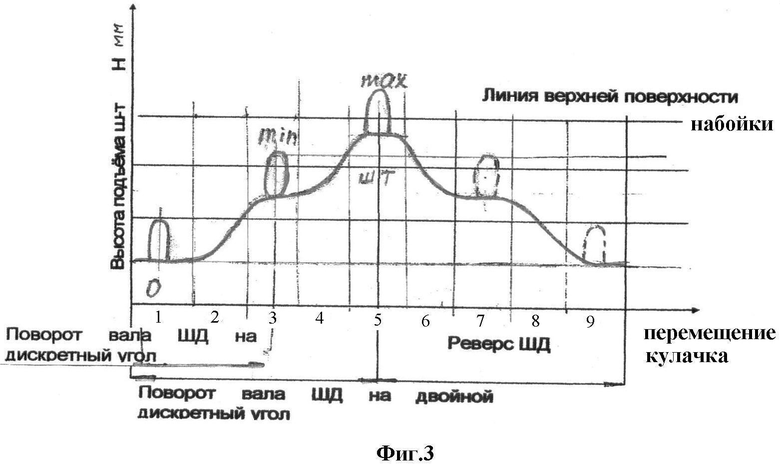
На фиг.3 показан график движения шипа-толкателя.
Сведения, подтверждающие возможность осуществления изобретения
Описание конструкции в статическом состоянии
В обуви, состоящей из верха и низа, последний включает в себя каблук 1 (фиг.1), имеющий основную 2 и набоечную 3 части. В основной части 2 каблука 1 есть ряд полостей. В полости 4 каблука 1, располагается УБ 5 с антенной, принимающей сигнал с ДУБа, имеющего кнопку подъема шипов-толкателей дистанционного управления высотой выхода шипов-толкателей над набоечной поверхностью и кнопку опускания шипов-толкателей для реверсного движения шипов-толкателей.
ДУБ находится отдельно от остальной конструкции устройства, выполнен в виде брелка и приводится в действие пальцем руки носчика, путем нажатия соответствующей кнопки.
В полости 8 основной части 2 каблука 1 располагается ШД 9, поворачивающий на заданный угол строенный поводок 10 трех плоских кулачков 11. Последние находятся в силовом замыкании с тремя шипами-толкателями 12, имеющими возможность вертикально перемещаться в специальном овальном корпусе 13, закрепленном двумя направляющими 14, выполненными в виде круглых шайб с отверстиями, которые предназначены для направленного движения шипов-толкателей 12. Имеются также три полости 15 в основной части 2 каблука 1, в которых располагаются три рычага строенного поводка 10 плоских кулачков 11. В теле набоечной части 3 каблука 1 имеются три сквозных отверстия 16, где размещаются три блока, в каждом из них находится шип-толкатель 12 с выступами 17 для опоры возвратных пружин 18, сами возвратные пружины 18.
Устройство в динамическом состоянии
Предлагаемое устройство функционирует следующим образом.
В ДУБе (фиг.2), выполненном в виде брелка, находящегося в руке носчика, нажимается кнопка подъема шипов-толкателей. Происходит передача сигнала на УБ, который преобразовывает полученный сигнал для поворота вала ШД на определенный угол.
Вал ШД поворачивает жестко закрепленный на нем строенный поводок, который своими тремя рычагами приводит в дугообразное движение плоские кулачки. При движении плоских кулачков их ступенчатые криволинейные поверхности, взаимодействуя с шипами-толкателями, поднимают последние над ходовой поверхностью набоечной части каблука.
При вторичном нажатии кнопки ДУБа подъема шипов-толкателей осуществляется выход шипов-толкателей на максимальную высоту. При нажатии кнопки ДУБа опускания шипов-толкателей осуществляется реверс. Далее приводится детализированное описание работы устройства.
При нажатии на кнопку ДУБа подъема шипов-толкателей радиосигнал с ДУБа передается на УБ (фиг.1), где воспринимается антенной. Принятый антенной, смонтированной в УБ 5, расположенном в основной части 2 каблука 1, сигнал преобразовывается и передается на приведение в действие ШД 9, поворачивающего на заданный угол вал 20 с жестко закрепленными тремя рычагами строенного поводка 10.
Строенный поводок 10, жестко соединенный с тремя плоскими кулачками 11, перемещает их по дуговой траектории. Плоские кулачки 11 своими ступенчатыми криволинейными поверхностями 21 перемещают подпружиненные шипы-толкатели 12, которые при своем подъеме одновременно сжимают возвратные пружины 18 выступами 17, предназначенными для опоры возвратных пружин 18. Шипы-толкатели 12 с рабочей поверхностью 22 выходят над поверхностью набоечной части 3 каблука 1. При вторичном нажатии кнопки ДУБа подъема шипов толкателей 12 последние поднимаются на следующую высоту, опираясь на горизонтальные плоскости ступенчатой криволинейной поверхности 21 плоских кулачков 11, предназначенных для обеспечения большей устойчивости опоры шипов-толкателей. Плоские кулачки 11 совершают дуговые движения по жестким пластинам 23, которые обеспечивают их перемещение с минимальным трением и создают устойчивую опору для кулачков 11 при их нагружении со стороны шипов-толкателей в процессе ходьбы.
При нажатии кнопки ДУБа опускания шипов-толкателей происходит реверсное движение ШД 9 (фиг.1), строенного поводка 10 и плоских кулачков 11. Шипы-толкатели 12, обратно скользя по ступенчатой криволинейной поверхности 21 плоских кулачков 11, под действием возвратных пружин 18 опускаются на первые горизонтальные плоскости профилей кулачков 11.
При вторичном нажатии кнопки ДУБа шипов-толкателей последние опускаются на исходные горизонтальные плоскости плоских кулачков, при этом рабочие поверхности шипов-толкателей занимают положения вровень с ходовой поверхностью набоечной части 3 каблука 1.
Подъем и опускание шипов-толкателей по профилированной поверхности плоского кулачка относительно ходовой поверхности набойки иллюстрируется на фиг.3.
По оси абсцисс нанесены фазы движения кулачка, по оси ординат - высота подъема шипов-толкателей (ШТ).
Ступенчатая криволинейная поверхность плоского кулачка изображена на графике сплошной ломаной линией. Указаны фазы подъема, спуска и выстоя. По оси абсцисс отмечены периоды поворота ШД на дискретные углы. На графике нанесены горизонтальные линии ходовой плоскости набоечной части каблука и различных высот подъема шипов-толкателей над ней. Также указаны фазы устойчивого положения шипов-толкателей на различных высотах подъема и опускания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОТИВОСКОЛЬЗЯЩЕЙ ПОДОШВЫ ОБУВИ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ ПЕРЕМЕЩЕНИЕМ ШИПОВ | 2010 |
|
RU2416346C1 |
| УСТРОЙСТВО ПРОТИВОСКОЛЬЗЯЩЕЙ ОБУВИ | 2011 |
|
RU2493756C2 |
| ХОДОВАЯ ПОВЕРХНОСТЬ КАБЛУКА С ПРОТИВОСКОЛЬЗЯЩИМИ СВОЙСТВАМИ | 2014 |
|
RU2580083C1 |
| Противоскользящее устройство для обуви | 1989 |
|
SU1736406A1 |
| Противоскользящее устройство для обуви | 1988 |
|
SU1729430A1 |
| Устройство против скольжения обуви для установки в полости каблука | 1989 |
|
SU1694094A1 |
| ПРОТИВОСКОЛЬЗЯЩЕЕ СРЕДСТВО ДЛЯ ОБУВИ (ВАРИАНТЫ) | 2009 |
|
RU2401624C1 |
| Машина для обтягивания кожей деревянных каблуков | 1935 |
|
SU49938A1 |
| ПРОТИВОСКОЛЬЗЯЩЕЕ СРЕДСТВО ДЛЯ ОБУВИ | 2009 |
|
RU2375939C1 |
| Устройство для прикрепления каблука к обуви | 1985 |
|
SU1279588A1 |

Устройство противоскользящей каблучной части обуви с дистанционным управлением перемещением шипов предназначено для решения двух задач: автономного дистанционного управления подъема шипов над ходовой поверхностью каблука и фиксированного выхода шипов на заданную высоту в соответствии с состоянием опорной ледяной поверхности. Дистанционное управляющее устройство, выполненное в виде брелка, находящегося в руке носчика обуви, при нажатии кнопки передает сигнал на управляющее устройство, имеющее принимающую антенну, преобразователь сигнала и источник электропитания, установленные в полости каблука. Управляющее устройство передает преобразованный сигнал на шаговый двигатель, который поворачивает свой вал на определенный угол. Вместе с валом шагового двигателя поворачивается закрепленный на нем строенный поводок, рычаги которого приводят в дуговое движение три плоских кулачка. Спрофилированные рабочие поверхности кулачков поднимают соединенные с ними три шипа-толкателя на заданную высоту над ходовой поверхностью каблука. При подаче с дистанционного управляющего устройства сигнала с противоположным знаком осуществляется опускание шипов-толкателей вровень с ходовой поверхностью каблука. 3 з.п. ф-лы, 3 ил.
1. Устройство противоскользящего каблука обуви с дистанционным управлением перемещения подпружиненных шипов-толкателей, имеющего основную и набоечную части, содержащее установленные в полостях набоечной части каблука обуви подпружиненные шипы-толкатели, помещенные в индивидуальных функциональных блоках, и механизм подъема и опускания шипов-толкателей, приводимый в действие от автономного дистанционного управляющего блока в виде брелка, передающего радиосигнал на управляющий блок, расположенный в полости основной части каблука и содержащий антенну, преобразователь принятого сигнала в управляющий сигнал для шагового двигателя, источник питания управляющего блока и шагового двигателя, расположенного в другой полости основной части каблука, получающего управляющий сигнал, поворачивает закрепленный на валу шагового двигателя строенный поводок, жестко соединенный с плоскими кулачками для подъема/опускания подпружиненных шипов-толкателей, при этом устройство может осуществлять реверсное движение.
2. Устройство по п.1, отличающееся тем, что в основной части каблука имеются три секторного вида полости для размещения трех рычагов строенного поводка и трех плоских кулачков для приведения в возвратно- поступательное движение трех шипов-толкателей; в полостях набоечной части каблука размещены три овальных корпуса, каждый из которых состоит из овального пустотелого цилиндра для размещения шипа-толкателя, возвратных пружин и двух направляющих для устойчивого движения шипа-толкателя.
3. Устройство по п.2, отличающееся тем, что профили плоских кулачков имеют участки подъема/опускания и плоские участки, последние предназначены для устойчивой опоры шипов-толкателей при установке их на определенную высоту и восприятия усилий от ледяной или снежной поверхности.
4. Устройство по пп.2 и 3, отличающееся тем, что под плоскими кулачками по линиям их дугового перемещения находятся жесткие пластины, служащие для обеспечения движения плоских кулачков с минимальными потерями на трение и для надежной устойчивой опоры плоских кулачков при их нагружении со стороны шипов-толкателей в процессе ходьбы.
| US 5557865 А, 24.09.1996 | |||
| US 4741115 А, 03.05.1988 | |||
| Противоскользящий поршень | 1990 |
|
SU1814863A1 |

