Предлагаемое изобретение относится к области измерительной и микросистемной техники, а более конкретно к интегральным измерительным элементам величин ускорения.
Известен многоосевой микромеханический дифференциальный акселерометр (см. патент США US 7104128, FIG.1), содержащий подложку, преобразователь перемещения, инерционную массу, активную область подвеса, пассивную область подвеса, а также первый чувствительный элемент, второй чувствительный элемент, третий чувствительный элемент, четвертый чувствительный элемент, первый дополнительный преобразователь перемещения, второй дополнительный преобразователь перемещения, третий дополнительный преобразователь перемещения, первую дополнительную активную область подвеса, вторую дополнительную активную область подвеса, третью дополнительную активную область подвеса, первую дополнительную пассивную область подвеса, вторую дополнительную пассивную область подвеса, третью дополнительную пассивную область подвеса, первую пластину жесткости преобразователя перемещения, вторую пластину жесткости преобразователя перемещения, первую пластину жесткости первого дополнительного преобразователя перемещения, вторую пластину жесткости первого дополнительного преобразователя перемещения, первую пластину жесткости второго дополнительного преобразователя перемещения, вторую пластину жесткости второго дополнительного преобразователя перемещения, первую пластину жесткости третьего дополнительного преобразователя перемещения, вторую пластину жесткости третьего дополнительного преобразователя перемещения, первую соединительную область преобразователя перемещения, вторую соединительную область преобразователя перемещения, третью соединительную область преобразователя перемещения, четвертую соединительную область преобразователя перемещения, первую соединительную область первого дополнительного преобразователя перемещения, вторую соединительную область первого дополнительного преобразователя перемещения, третью соединительную область первого дополнительного преобразователя перемещения, четвертую соединительную область первого дополнительного преобразователя перемещения, первую соединительную область второго дополнительного преобразователя перемещения, вторую соединительную область второго дополнительного преобразователя перемещения, третью соединительную область второго дополнительного преобразователя перемещения, четвертую соединительную область второго дополнительного преобразователя перемещения, первую соединительную область третьего дополнительного преобразователя перемещения, вторую соединительную область третьего дополнительного преобразователя перемещения, третью соединительную область третьего дополнительного преобразователя перемещения, четвертую соединительную область третьего дополнительного преобразователя перемещения, первую якорную область преобразователя перемещения, вторую якорную область преобразователя перемещения, третью якорную область преобразователя перемещения, четвертую якорную область преобразователя перемещения, первую якорную область первого дополнительного преобразователя перемещения, вторую якорную область первого дополнительного преобразователя перемещения, третью якорную область первого дополнительного преобразователя перемещения, четвертую якорную область первого дополнительного преобразователя перемещения, первую якорную область второго дополнительного преобразователя перемещения, вторую якорную область второго дополнительного преобразователя перемещения, третью якорную область второго дополнительного преобразователя перемещения, четвертую якорную область второго дополнительного преобразователя перемещения, первую якорную область третьего дополнительного преобразователя перемещения, вторую якорную область третьего дополнительного преобразователя перемещения, третью якорную область третьего дополнительного преобразователя перемещения, четвертую якорную область третьего дополнительного преобразователя перемещения, первую упругую балку преобразователя перемещения, вторую упругую балку преобразователя перемещения, третью упругую балку преобразователя перемещения, четвертую упругую балку преобразователя перемещения, первую упругую балку первого дополнительного преобразователя перемещения, вторую упругую балку первого дополнительного преобразователя перемещения, третью упругую балку первого дополнительного преобразователя перемещения, четвертую упругую балку первого дополнительного преобразователя перемещения, первую упругую балку второго дополнительного преобразователя перемещения, вторую упругую балку второго дополнительного преобразователя перемещения, третью упругую балку второго дополнительного преобразователя перемещения, четвертую упругую балку второго дополнительного преобразователя перемещения, первую упругую балку третьего дополнительного преобразователя перемещения, вторую упругую балку третьего дополнительного преобразователя перемещения, третью упругую балку третьего дополнительного преобразователя перемещения, четвертую упругую балку третьего дополнительного преобразователя перемещения, причем инерционная масса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки, преобразователь перемещений образован первой соединительной областью преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом с первой пластиной жесткости преобразователя перемещений, второй соединительной областью преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом со второй пластиной жесткости преобразователя перемещений, третьей соединительной областью преобразователя перемещений, которая одним концом соединена с пассивной областью подвеса, а другим концом с первой пластиной жесткости преобразователя перемещений, четвертой соединительной областью преобразователя перемещений, которая одним концом соединена с пассивной областью подвеса, а другим концом со второй пластиной жесткости преобразователя перемещений, составляющими активную область подвеса, а также первым чувствительным элементом, представляющим балку из полупроводникового материала, которая одним концом соединена с первой пластиной жесткости преобразователя перемещений, а другим концом со второй пластиной жесткости преобразователя перемещений, первый дополнительный преобразователь перемещений образован первой соединительной областью первого дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом с первой пластиной жесткости первого дополнительного преобразователя перемещений, второй соединительной областью первого дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом со второй пластиной жесткости первого дополнительного преобразователя перемещений, третьей соединительной областью первого дополнительного преобразователя перемещений, которая одним концом соединена с первой дополнительной пассивной областью подвеса, а другим концом с первой пластиной жесткости первого дополнительного преобразователя перемещений, четвертой соединительной областью первого дополнительного преобразователя перемещений, которая одним концом соединена с первой дополнительной пассивной областью подвеса, а другим концом со второй пластиной жесткости первого дополнительного преобразователя перемещений, составляющими первую дополнительную активную область подвеса, а также вторым чувствительным элементом, представляющим балку из полупроводникового материала, которая одним концом соединена с первой пластиной жесткости первого дополнительного преобразователя перемещений, а другим концом со второй пластиной жесткости первого дополнительного преобразователя перемещений, второй дополнительный преобразователь перемещений образован первой соединительной областью второго дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом с первой пластиной жесткости второго дополнительного преобразователя перемещений, второй соединительной областью второго дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом со второй пластиной жесткости второго дополнительного преобразователя перемещений, третьей соединительной областью второго дополнительного преобразователя перемещений, которая одним концом соединена со второй дополнительной пассивной областью подвеса, а другим концом с первой пластиной жесткости второго дополнительного преобразователя перемещений, четвертой соединительной областью второго дополнительного преобразователя перемещений, которая одним концом соединена со второй дополнительной пассивной областью подвеса, а другим концом со второй пластиной жесткости второго дополнительного преобразователя перемещений, составляющими вторую дополнительную активную область подвеса, а также третьим чувствительным элементом, представляющим балку из полупроводникового материала, которая одним концом соединена с первой пластиной жесткости второго дополнительного преобразователя перемещений, а другим концом со второй пластиной жесткости второго дополнительного преобразователя перемещений, третий дополнительный преобразователь перемещений образован первой соединительной областью третьего дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом с первой пластиной жесткости третьего дополнительного преобразователя перемещений, второй соединительной областью третьего дополнительного преобразователя перемещений, которая одним концом соединена с инерционной массой, а другим концом со второй пластиной жесткости третьего дополнительного преобразователя перемещений, третьей соединительной областью третьего дополнительного преобразователя перемещений, которая одним концом соединена с третьей дополнительной пассивной областью подвеса, а другим концом с первой пластиной жесткости третьего дополнительного преобразователя перемещений, четвертой соединительной областью третьего дополнительного преобразователя перемещений, которая одним концом соединена с третьей дополнительной пассивной областью подвеса, а другим концом со второй пластиной жесткости третьего дополнительного преобразователя перемещений, составляющими третью дополнительную активную область подвеса, а также четвертым чувствительным элементом, представляющим балку из полупроводникового материала, которая одним концом соединена с первой пластиной жесткости третьего дополнительного преобразователя перемещений, а другим концом со второй пластиной жесткости третьего дополнительного преобразователя перемещений, пассивная область подвеса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки и соединенную с первой якорной областью преобразователя перемещений посредством первой упругой балки преобразователя перемещения, со второй якорной областью преобразователя перемещений посредством второй упругой балки преобразователя перемещения, с третьей якорной областью преобразователя перемещений посредством третьей упругой балки преобразователя перемещения, с четвертой якорной областью преобразователя перемещений посредством четвертой упругой балки преобразователя перемещения, первая дополнительная пассивная область подвеса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки и соединенную с первой якорной областью первого дополнительного преобразователя перемещений посредством первой упругой балки первого дополнительного преобразователя перемещения, со второй якорной областью первого дополнительного преобразователя перемещений посредством второй упругой балки первого дополнительного преобразователя перемещения, с третьей якорной областью первого дополнительного преобразователя перемещений посредством третьей упругой балки первого дополнительного преобразователя перемещения, с четвертой якорной областью первого дополнительного преобразователя перемещений посредством четвертой упругой балки первого дополнительного преобразователя перемещения, вторая дополнительная пассивная область подвеса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки и соединенную с первой якорной областью второго дополнительного преобразователя перемещений посредством первой упругой балки второго дополнительного преобразователя перемещения, со второй якорной областью второго дополнительного преобразователя перемещений посредством второй упругой балки второго дополнительного преобразователя перемещения, с третьей якорной областью второго дополнительного преобразователя перемещений посредством третьей упругой балки второго дополнительного преобразователя перемещения, с четвертой якорной областью второго дополнительного преобразователя перемещений посредством четвертой упругой балки второго дополнительного преобразователя перемещения, третья дополнительная пассивная область подвеса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки и соединенную с первой якорной областью третьего дополнительного преобразователя перемещений посредством первой упругой балки третьего дополнительного преобразователя перемещения, со второй якорной областью третьего дополнительного преобразователя перемещений посредством второй упругой балки третьего дополнительного преобразователя перемещения, с третьей якорной областью третьего дополнительного преобразователя перемещений посредством третьей упругой балки третьего дополнительного преобразователя перемещения, с четвертой якорной областью третьего дополнительного преобразователя перемещений посредством четвертой упругой балки третьего дополнительного преобразователя перемещения, первая якорная область преобразователя перемещения, вторая якорная область преобразователя перемещения, третья якорная область преобразователя перемещения, четвертая якорная область преобразователя перемещения, первая якорная область первого дополнительного преобразователя перемещения, вторая якорная область первого дополнительного преобразователя перемещения, третья якорная область первого дополнительного преобразователя перемещения, четвертая якорная область первого дополнительного преобразователя перемещения, первая якорная область второго дополнительного преобразователя перемещения, вторая якорная область второго дополнительного преобразователя перемещения, третья якорная область второго дополнительного преобразователя перемещения четвертая якорная область второго дополнительного преобразователя перемещения, первая якорная область третьего дополнительного преобразователя перемещения, вторая якорная область третьего дополнительного преобразователя перемещения, третья якорная область третьего дополнительного преобразователя перемещения, четвертая якорная область третьего дополнительного преобразователя перемещения жестко соединены с подложкой.
Признаками аналога, совпадающими с существенными признаками, являются подложка, преобразователь перемещения, инерционная масса, активная область подвеса, пассивная область подвеса.
Причинами, препятствующими достижению технического результата, являются снижение чувствительности измерительного устройства при переходе к наноразмерным проектным нормам, отсутствие возможности одновременного измерения трех взаимно перпендикулярных составляющих ускорения с одинаковой чувствительностью.
Функциональным аналогом заявляемого объекта является кремниевый интегральный акселерометр (см. патент США US 6683358, FIG.5), содержащий подложку, преобразователь перемещения, инерционную массу, активную область подвеса, пассивную область подвеса, а также якорную область, первый дополнительный преобразователь перемещения, второй дополнительный преобразователь перемещения, третий дополнительный преобразователь перемещения, первую дополнительную активную область подвеса, вторую дополнительную активную область подвеса, третью дополнительную активную область подвеса, четвертую дополнительную активную область подвеса, пятую дополнительную активную область подвеса, шестую дополнительную активную область подвеса, седьмую дополнительную активную область подвеса, первую дополнительную пассивную область подвеса, вторую дополнительную пассивную область подвеса, третью дополнительную пассивную область подвеса, первый чувствительный элемент, второй чувствительный элемент, третий чувствительный элемент, четвертый чувствительный элемент, пятый чувствительный элемент, шестой чувствительный элемент, седьмой чувствительный элемент, восьмой чувствительный элемент, девятый чувствительный элемент, десятый чувствительный элемент, одиннадцатый чувствительный элемент, двенадцатый чувствительный элемент, причем инерционная масса представляет собой квадратную рамку из полупроводникового материала, расположенную с зазором относительно подложки, преобразователь перемещения образован первым и вторым чувствительными элементами, расположенными на активной области подвеса, которая одним концом соединена с инерционной массой, а другим концом с пассивной областью подвеса, а также третьим чувствительным элементом, расположенным на первой дополнительной активной области подвеса, которая одним концом соединена с пассивной областью подвеса, а другим концом с якорной областью, первый дополнительный преобразователь перемещения образован четвертым и пятым чувствительными элементами, расположенными на второй дополнительной активной области подвеса, которая одним концом соединена с инерционной массой, а другим концом с первой дополнительной пассивной областью подвеса, а также шестым чувствительным элементом, расположенным на третьей дополнительной активной области подвеса, которая одним концом соединена с первой дополнительной пассивной областью подвеса, а другим концом с якорной областью, второй дополнительный преобразователь перемещения образован седьмым и восьмым чувствительными элементами, расположенными на четвертой дополнительной активной области подвеса, которая одним концом соединена с якорной областью, а другим концом со второй дополнительной пассивной областью подвеса, а также девятым чувствительным элементом, расположенным на пятой дополнительной активной области подвеса, которая одним концом соединена со второй дополнительной пассивной областью подвеса, а другим концом с инерционной массой, третий дополнительный преобразователь перемещения образован десятым и одиннадцатым чувствительными элементами, расположенными на шестой дополнительной активной области подвеса, которая одним концом соединена с якорной областью, а другим концом с третьей дополнительной пассивной областью подвеса, а также двенадцатым чувствительным элементом, расположенным на седьмой дополнительной активной области подвеса, которая одним концом соединена с третьей дополнительной пассивной областью подвеса, а другим концом с инерционной массой.
Признаками аналога, совпадающими с существенными признаками, являются подложка, преобразователь перемещения, инерционная масса, активная область подвеса, пассивная область подвеса.
Причинами, препятствующими достижению технического результата, являются снижение чувствительности измерительного устройства при переходе к наноразмерным проектным нормам, сложность обеспечения одинаковой чувствительности по трем взаимно перпендикулярным направлениям.
Из известных наиболее близким по технической сущности к заявляемому объекту является балочный акселерометр на основе туннельного эффекта (см. патент США US 4638669, FIG.2), содержащий подложку, преобразователь перемещения, инерционную массу, активную область подвеса, пассивную область подвеса, неподвижный электрод, подвижный электрод, а также якорную область, причем инерционная масса представляет собой пластину из полупроводникового материала, расположенную с зазором относительно подложки и соединенную с активной областью подвеса, которая одним концом соединена с инерционной массой, а другим концом с пассивной областью подвеса, нижняя часть пассивной области подвеса соединена с якорной областью, жестко закрепленной относительно подложки, преобразователь перемещения представляет собой автоэмиссионный контакт, который образован подвижным электродом, закрепленным на нижней части инерционной массы, и неподвижным электродом, закрепленным на подложке.
Признаками прототипа, совпадающими с существенными признаками, являются подложка, преобразователь перемещения, инерционная масса, активная область подвеса, пассивная область подвеса, неподвижный электрод, подвижный электрод.
Причинами, препятствующими достижению технического результата, являются отсутствие возможности одновременного измерения трех взаимно перпендикулярных составляющих ускорения.
Задачей предлагаемого изобретения является обеспечение высокой чувствительности одновременного измерения трех взаимно перпендикулярных составляющих ускорения, а также интегральная реализация в наномасштабе.
Для достижения необходимого технического результата в многоосевой интегральный микромеханический туннельный акселерометр, содержащий подложку, преобразователь перемещения, инерционную массу, активную область подвеса, пассивную область подвеса, неподвижный электрод, подвижный электрод, введены первая соединительная область, дополнительная активная область подвеса, маскирующая область неподвижного электрода, первый дополнительный неподвижный электрод, первый дополнительный подвижный электрод, первая дополнительная инерционная масса, первая дополнительная соединительная область, активная область первого дополнительного подвеса, дополнительная активная область первого дополнительного подвеса, пассивная область первого дополнительного подвеса, маскирующая область первого дополнительного неподвижного электрода, второй дополнительный неподвижный электрод, второй дополнительный подвижный электрод, вторая дополнительная инерционная масса, вторая дополнительная соединительная область, активная область второго дополнительного подвеса, дополнительная активная область второго дополнительного подвеса, пассивная область второго дополнительного подвеса, маскирующая область второго дополнительного неподвижного электрода, маскирующая область подвижных электродов, якорная область неподвижного электрода, якорная область подвижного электрода, якорная область первого дополнительного неподвижного электрода, якорная область первого дополнительного подвижного электрода, якорная область второго дополнительного неподвижного электрода, якорная область второго дополнительного подвижного электрода, первый дополнительный туннельный преобразователь перемещения, второй дополнительный туннельный преобразователь перемещения, причем преобразователь перемещения представляет собой туннельный контакт, образованный неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой соединительной областью, которая одним концом жестко соединена с инерционной массой, а другим концом с активной областью подвеса и дополнительной активной областью подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой соединительной областью, а другими с пассивной областью подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, первый дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный первым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и первым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности первой дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой дополнительной соединительной областью, которая одним концом жестко соединена с первой дополнительной инерционной массой, а другим концом с активной областью первого дополнительного подвеса и дополнительной активной областью первого дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой дополнительной соединительной областью, а другими с пассивной областью первого дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, второй дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный вторым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и вторым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности второй дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена со второй дополнительной соединительной областью, которая одним концом жестко соединена со второй дополнительной инерционной массой, а другим концом с активной областью второго дополнительного подвеса и дополнительной активной областью второго дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены со второй дополнительной соединительной областью, а другими с пассивной областью второго дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, оси чувствительности преобразователей перемещения взаимно перпендикулярны.
Технический результат достигается тем, что в многоосевой интегральный микромеханический туннельный акселерометр введены первая соединительная область, дополнительная активная область подвеса, маскирующая область неподвижного электрода, первый дополнительный неподвижный электрод, первый дополнительный подвижный электрод, первая дополнительная инерционная масса, первая дополнительная соединительная область, активная область первого дополнительного подвеса, дополнительная активная область первого дополнительного подвеса, пассивная область первого дополнительного подвеса, маскирующая область первого дополнительного неподвижного электрода, второй дополнительный неподвижный электрод, второй дополнительный подвижный электрод, вторая дополнительная инерционная масса, вторая дополнительная соединительная область, активная область второго дополнительного подвеса, дополнительная активная область второго дополнительного подвеса, пассивная область второго дополнительного подвеса, маскирующая область второго дополнительного неподвижного электрода, маскирующая область подвижных электродов, якорная область неподвижного электрода, якорная область подвижного электрода, якорная область первого дополнительного неподвижного электрода, якорная область первого дополнительного подвижного электрода, якорная область второго дополнительного неподвижного электрода, якорная область второго дополнительного подвижного электрода, первый дополнительный туннельный преобразователь перемещения, второй дополнительный туннельный преобразователь перемещения, причем преобразователь перемещения представляет собой туннельный контакт, образованный неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой соединительной областью, которая одним концом жестко соединена с инерционной массой, а другим концом с активной областью подвеса и дополнительной активной областью подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой соединительной областью, а другими с пассивной областью подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, первый дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный первым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и первым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности первой дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой дополнительной соединительной областью, которая одним концом жестко соединена с первой дополнительной инерционной массой, а другим концом с активной областью первого дополнительного подвеса и дополнительной активной областью первого дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой дополнительной соединительной областью, а другими с пассивной областью первого дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, второй дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный вторым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и вторым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности второй дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена со второй дополнительной соединительной областью, которая одним концом жестко соединена со второй дополнительной инерционной массой, а другим концом с активной областью второго дополнительного подвеса и дополнительной активной областью второго дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены со второй дополнительной соединительной областью, а другими с пассивной областью второго дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, оси чувствительности преобразователей перемещения взаимно перпендикулярны.
Сравнивая предлагаемое устройство с прототипом, видим, что оно содержит новые признаки, то есть соответствует критерию новизны. Проводя сравнение с аналогами, приходим к выводу, что предлагаемое устройство соответствует критерию "существенные отличия", так как в аналогах не обнаружены предъявляемые новые признаки. Получен положительный эффект, заключающийся в обеспечении высокой чувствительности при интегральной реализации в наномасштабе, а также возможности одновременной регистрации трех взаимно перпендикулярных составляющих ускорения с одинаковой чувствительностью по различным составляющим.
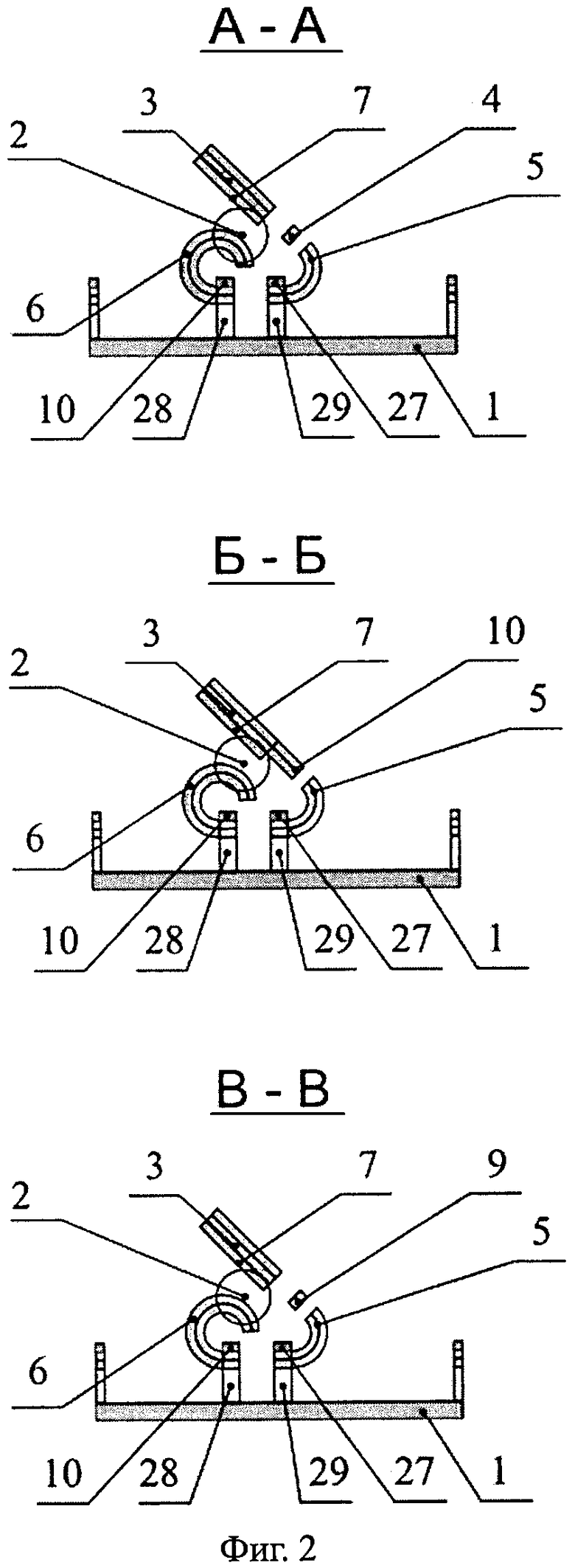
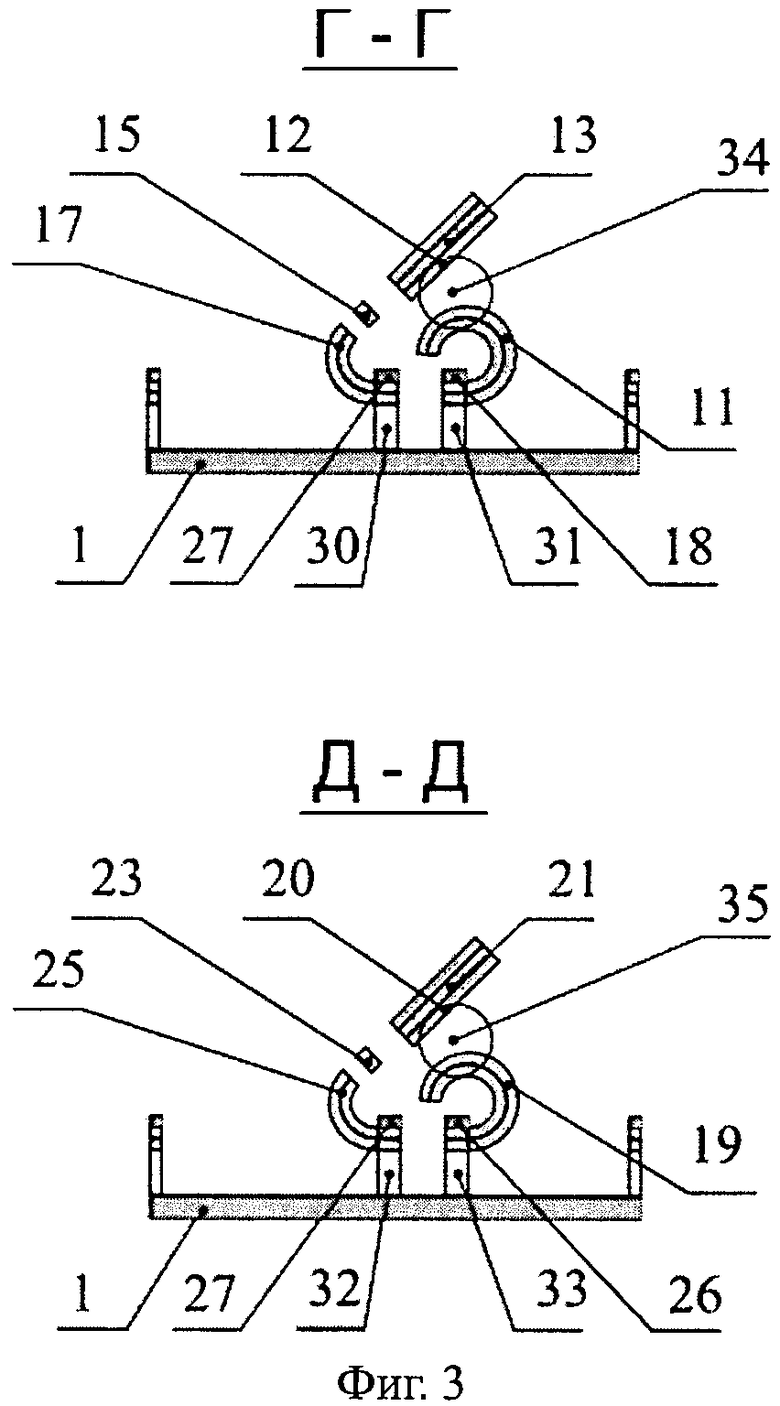
На фиг.1 приведена топология предлагаемого многоосевого интегрального микромеханического туннельного акселерометра, а также обозначены оси координат. На фиг.2 приведены сечения сенсорного элемента предлагаемого многоосевого интегрального микромеханического туннельного акселерометра, обеспечивающего регистрацию линейного ускорения в направлении оси X. На фиг.3 приведены сечения сенсорных элементов предлагаемого многоосевого интегрального микромеханического туннельного акселерометра, обеспечивающих регистрацию линейного ускорения в направлении осей Y и Z.
Многоосевой интегральный микромеханический туннельный акселерометр содержит подложку 1, преобразователь перемещения 2, инерционную массу 3, активную область подвеса 4, пассивную область подвеса 5, неподвижный электрод 6, подвижный электрод 7, первую соединительную область 8, дополнительную активную область подвеса 9, маскирующую область неподвижного электрода 10, первый дополнительный неподвижный электрод 11, первый дополнительный подвижный электрод 12, первую дополнительную инерционную массу 13, первую дополнительную соединительную область 14, активную область первого дополнительного подвеса 15, дополнительную активную область первого дополнительного подвеса 16, пассивную область первого дополнительного подвеса 17, маскирующую область первого дополнительного неподвижного электрода 18, второй дополнительный неподвижный электрод 19, второй дополнительный подвижный электрод 20, вторую дополнительную инерционную массу 21, вторую дополнительную соединительную область 22, активную область второго дополнительного подвеса 23, дополнительную активную область второго дополнительного подвеса 24, пассивную область второго дополнительного подвеса 25, маскирующую область второго дополнительного неподвижного электрода 26, маскирующую область подвижных электродов 27, якорную область неподвижного электрода 28, якорную область подвижного электрода 29, якорную область первого дополнительного неподвижного электрода 30, якорную область первого дополнительного подвижного электрода 31, якорную область второго дополнительного неподвижного электрода 32, якорную область второго дополнительного подвижного электрода 33, первый дополнительный туннельный преобразователь перемещения 34, второй дополнительный туннельный преобразователь перемещения 35, причем преобразователь перемещения 2 представляет собой туннельный контакт, образованный неподвижным электродом 6, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области неподвижного электрода 28, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области неподвижного электрода 10, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и подвижным электродом 7, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности инерционной массы 3, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой соединительной областью 8, которая одним концом жестко соединена с инерционной массой 3, а другим концом с активной областью подвеса 4 и дополнительной активной областью подвеса 9, представляющими собой торсионные балки, которые одними концами жестко соединены с первой соединительной областью 8, а другими с пассивной областью подвеса 5, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области подвижного электрода 29, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов 27, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, первый дополнительный туннельный преобразователь перемещения 34 представляет собой туннельный контакт, образованный первым дополнительным неподвижным электродом 11, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области первого дополнительного неподвижного электрода 31, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области первого дополнительного неподвижного электрода 18, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и первым дополнительным подвижным электродом 12, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности первой дополнительной инерционной массы 13, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой дополнительной соединительной областью 14, которая одним концом жестко соединена с первой дополнительной инерционной массой 13, а другим концом с активной областью первого дополнительного подвеса 15 и дополнительной активной областью первого дополнительного подвеса 16, представляющими собой торсионные балки, которые одними концами жестко соединены с первой дополнительной соединительной областью 14, а другими с пассивной областью первого дополнительного подвеса 17, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области первого дополнительного подвижного электрода 30, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов 27, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, второй дополнительный туннельный преобразователь перемещения 35 представляет собой туннельный контакт, образованный вторым дополнительным неподвижным электродом 19, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области второго дополнительного неподвижного электрода 33, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области второго дополнительного неподвижного электрода 26, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и вторым дополнительным подвижным электродом 20, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности второй дополнительной инерционной массы 21, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена со второй дополнительной соединительной областью 22, которая одним концом жестко соединена со второй дополнительной инерционной массой 21, а другим концом с активной областью второго дополнительного подвеса 23 и дополнительной активной областью второго дополнительного подвеса 24, представляющими собой торсионные балки, которые одними концами жестко соединены со второй дополнительной соединительной областью 22, а другими с пассивной областью второго дополнительного подвеса 25, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1 посредством якорной области второго дополнительного подвижного электрода 32, нижняя поверхность которой жестко соединена с подложкой 1, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов 27, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, оси чувствительности преобразователей перемещения взаимно перпендикулярны.
Работает устройство следующим образом. При подаче положительного напряжения питания на неподвижные электроды 6, 11, 19 относительно подвижных 7, 12, 20 вследствие малости пространственного зазора, разделяющего области подвижных 7, 12, 20 и неподвижных 6, 11, 19 электродов, электроны туннелируют из областей подвижных электродов 7, 12, 20 в соответствующие области неподвижных электродов 6, 11, 19 сквозь потенциальные барьеры, образованные пространственными зазорами, и создают туннельные токи, по величинам которых могут быть определены составляющие линейного ускорения.
Маскирующие области неподвижных электродов 10, 18, 26, расположенные над якорными областями 28, 31, 33, а также маскирующая область подвижных электродов 27, расположенная над якорными областями 29, 30, 32, ограничивают длину цилиндрических оболочек подвижных электродов 7, 12, 20 и неподвижных электродов 6, 11, 19, а также обеспечивают жесткое закрепление неподвижных электродов 6, 11, 19 и пассивных областей подвеса 8, 14, 22 относительно подложки.
Пассивные области подвеса 5, 17, 25, имеющие форму цилиндрических оболочек, обеспечивают взаимно перпендикулярную ориентацию осей чувствительности преобразователей перемещения 2, 34, 35.
При возникновении ускорения подложки 1 в направлении, совпадающем с положительным направлением оси X, инерционная масса 3 с закрепленным на ней подвижным электродом 7 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 4, 9, с которыми она соединена посредством соединительной области 8. Значение силы туннельного тока, протекающего между подвижным электродом 7 и неподвижным электродом 6, уменьшается вследствие увеличения пространственного зазора между электродами 6, 7.
При возникновении ускорения подложки 1 в направлении, совпадающем с отрицательным направлением оси X, инерционная масса 3 с закрепленным на ней подвижным электродом 7 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 4, 9, с которыми она соединена посредством соединительной области 8. Значение силы туннельного тока, протекающего между подвижным электродом 7 и неподвижным электродом 6, увеличивается вследствие уменьшения пространственного зазора между электродами 6, 7.
При возникновении ускорения подложки 1 в направлении, совпадающем с положительным направлением оси Y, инерционная масса 13 с закрепленным на ней подвижным электродом 12 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 15, 16, с которыми она соединена посредством соединительной области 14. Значение силы туннельного тока, протекающего между подвижным электродом 12 и неподвижным электродом 11, уменьшается вследствие увеличения пространственного зазора между электродами 11, 12.
При возникновении ускорения подложки 1 в направлении, совпадающем с отрицательным направлением оси Y, инерционная масса 13 с закрепленным на ней подвижным электродом 12 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 15, 16, с которыми она соединена посредством соединительной области 14. Значение силы туннельного тока, протекающего между подвижным электродом 12 и неподвижным электродом 11, увеличивается вследствие уменьшения пространственного зазора между электродами 11, 12.
При возникновении ускорения подложки 1 в направлении, совпадающем с положительным направлением оси Z, инерционная масса 21 с закрепленным на ней подвижным электродом 20 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 23, 24, с которыми она соединена посредством соединительной области 22. Значение силы туннельного тока, протекающего между подвижным электродом 20 и неподвижным электродом 19, уменьшается вследствие увеличения пространственного зазора между электродами 19, 20.
При возникновении ускорения подложки 1 в направлении, совпадающем с отрицательным направлением оси Z, инерционная масса 21 с закрепленным на ней подвижным электродом 20 под действием сил инерции перемещается в противоположном направлении, инициируя упругую деформацию активных областей подвеса 23, 24, с которыми она соединена посредством соединительной области 22. Значение силы туннельного тока, протекающего между подвижным электродом 20 и неподвижным электродом 19, увеличивается вследствие уменьшения пространственного зазора между электродами 19, 20.
Таким образом, предлагаемое устройство представляет собой многоосевой интегральный микромеханический туннельный акселерометр, обеспечивающий высокую чувствительность одновременного измерения трех взаимно перпендикулярных составляющих ускорения, а также возможность интегральной реализации в наномасштабе.
Использование эффекта туннелирования носителей заряда между тремя парами соответствующим образом ориентированных подвижных и неподвижных электродов обеспечивает высокую чувствительность одновременного измерения величин трех взаимно перпендикулярных составляющих ускорения, а также интегральную реализацию в наномасштабе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегральный микромеханический туннельный акселерометр | 2017 |
|
RU2660412C1 |
| ИНТЕГРАЛЬНЫЙ НАНОЭЛЕКТРОМЕХАНИЧЕСКИЙ ТУННЕЛЬНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2022 |
|
RU2794468C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АВТОЭМИССИОННЫЙ АКСЕЛЕРОМЕТР | 2006 |
|
RU2298191C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АВТОЭМИССИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2390031C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР НА ОСНОВЕ ТУННЕЛЬНОГО ЭФФЕКТА | 2005 |
|
RU2289822C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ СО СВОБОДНО ВИСЯЩИМИ МИКРОМОСТИКАМИ | 2016 |
|
RU2632630C1 |
| СПОСОБ ФОРМИРОВАНИЯ МНОГОСЛОЙНОГО ОМИЧЕСКОГО КОНТАКТА ФОТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 2009 |
|
RU2391741C1 |
| МИКРОПОЛОСКОВЫЙ СТАБИЛИЗИРОВАННЫЙ РЕЗОНАНСНО-ТУННЕЛЬНЫЙ ГЕНЕРАТОР ЭЛЕКТРОМАГНИТНЫХ ВОЛН ДЛЯ МИЛЛИМЕТРОВОГО И СУБМИЛЛИМЕТРОВОГО ДИАПАЗОНА ДЛИН ВОЛН | 2004 |
|
RU2337467C2 |
| Электростатический преобразователь | 2021 |
|
RU2797442C2 |
| СТРУКТУРА МЕТАЛЛ-ДИЭЛЕКТРИК-ПОЛУПРОВОДНИК НА ОСНОВЕ СОЕДИНЕНИЙ AB И СПОСОБ ЕЕ ФОРМИРОВАНИЯ | 2010 |
|
RU2420828C1 |
Изобретение относится к области измерительной и микросистемной техники, а более конкретно к интегральным измерительным элементам величин ускорения. Акселерометр содержит подложку 1, преобразователь перемещения 2, инерционную массу 3, активные области подвеса 4 и 9, пассивную область подвеса 5, неподвижный электрод 6, подвижный электрод 7, а также два дополнительных подвеса с активными областями 15, 16 и 23, 24 соответственно и с пассивными областями 17 и 25 соответственно, две дополнительные инерционные массы 13 и 21, два дополнительных неподвижных электрода 11 и 19, два дополнительных подвижных электрода 12 и 20 и два дополнительных туннельных преобразователя перемещения 34 и 35. Преобразователь перемещения 2 представляет собой туннельный контакт, образованный неподвижным электродом 6, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки 1. Изобретение позволяет одновременно измерить три взаимно перпендикулярные составляющие ускорения. 3 ил.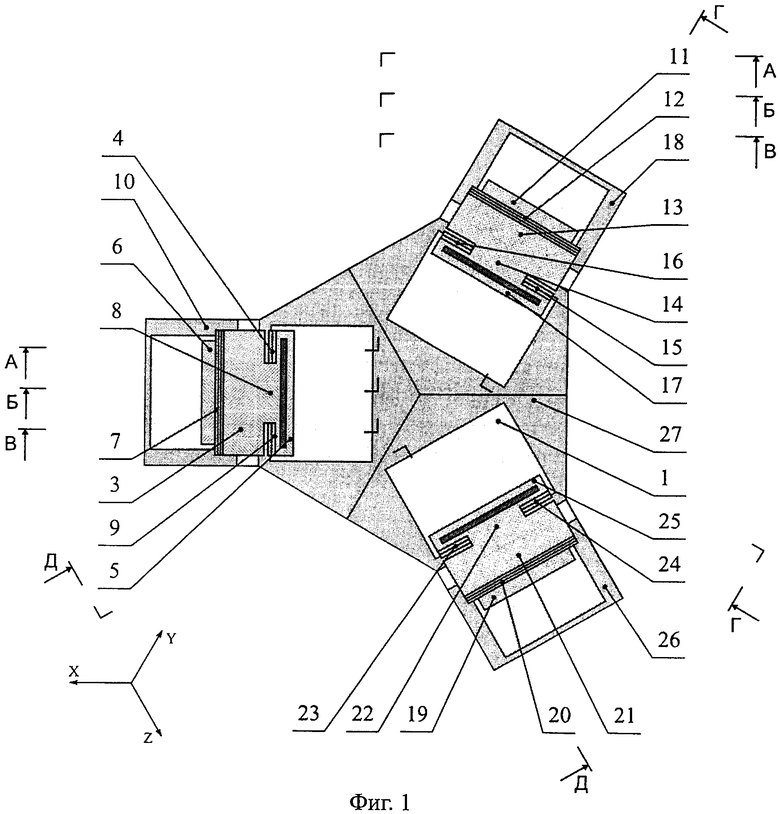
Многоосевой интегральный микромеханический туннельный акселерометр, содержащий подложку, преобразователь перемещения, инерционную массу, активную область подвеса, пассивную область подвеса, неподвижный электрод, подвижный электрод, отличающийся тем, что в него введены первая соединительная область, дополнительная активная область подвеса, маскирующая область неподвижного электрода, первый дополнительный неподвижный электрод, первый дополнительный подвижный электрод, первая дополнительная инерционная масса, первая дополнительная соединительная область, активная область первого дополнительного подвеса, дополнительная активная область первого дополнительного подвеса, пассивная область первого дополнительного подвеса, маскирующая область первого дополнительного неподвижного электрода, второй дополнительный неподвижный электрод, второй дополнительный подвижный электрод, вторая дополнительная инерционная масса, вторая дополнительная соединительная область, активная область второго дополнительного подвеса, дополнительная активная область второго дополнительного подвеса, пассивная область второго дополнительного подвеса, маскирующая область второго дополнительного неподвижного электрода, маскирующая область подвижных электродов, якорная область неподвижного электрода, якорная область подвижного электрода, якорная область первого дополнительного неподвижного электрода, якорная область первого дополнительного подвижного электрода, якорная область второго дополнительного неподвижного электрода, якорная область второго дополнительного подвижного электрода, первый дополнительный туннельный преобразователь перемещения, второй дополнительный туннельный преобразователь перемещения, причем преобразователь перемещения представляет собой туннельный контакт, образованный неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго-типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой соединительной областью, которая одним концом жестко соединена с инерционной массой, а другим концом с активной областью подвеса и дополнительной активной областью подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой соединительной областью, а другими с пассивной областью подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси X, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, первый дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный первым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области первого дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и первым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности первой дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена с первой дополнительной соединительной областью, которая одним концом жестко соединена с первой дополнительной инерционной массой, а другим концом с активной областью первого дополнительного подвеса и дополнительной активной областью первого дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены с первой дополнительной соединительной областью, а другими с пассивной областью первого дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области первого дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Y, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, второй дополнительный туннельный преобразователь перемещения представляет собой туннельный контакт, образованный вторым дополнительным неподвижным электродом, который представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области второго дополнительного неподвижного электрода, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, и вторым дополнительным подвижным электродом, который представляет собой пластину, формируемую из сжатой пленки арсенида галлия второго типа проводимости, жестко закрепленную на нижней поверхности второй дополнительной инерционной массы, которая представляет собой двухслойную пластину, нижняя часть которой формируется из растянутой пленки арсенида индия второго типа проводимости, а верхняя из сжатой пленки арсенида галлия второго типа проводимости и одним концом жестко соединена со второй дополнительной соединительной областью, которая одним концом жестко соединена со второй дополнительной инерционной массой, а другим концом с активной областью второго дополнительного подвеса и дополнительной активной областью второго дополнительного подвеса, представляющими собой торсионные балки, которые одними концами жестко соединены со второй дополнительной соединительной областью, а другими с пассивной областью второго дополнительного подвеса, которая представляет собой цилиндрическую оболочку, жестко закрепленную относительно подложки посредством якорной области второго дополнительного подвижного электрода, нижняя поверхность которой жестко соединена с подложкой, а верхняя с нижней частью внешней поверхности оболочки, и маскирующей области подвижных электродов, нижняя поверхность которой жестко соединена с нижней внутренней поверхностью оболочки, ось симметрии оболочки перпендикулярна оси Z, внешняя поверхность формируется из сжатой пленки арсенида индия второго типа проводимости, а внутренняя из растянутой пленки арсенида галлия второго типа проводимости, оси чувствительности преобразователей перемещения взаимно перпендикулярны.
| US 4638669 А, 27.01.1987 | |||
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР НА ОСНОВЕ ТУННЕЛЬНОГО ЭФФЕКТА | 2005 |
|
RU2289822C1 |
| US 7104128 B2, 12.09.2006 | |||
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АВТОЭМИССИОННЫЙ АКСЕЛЕРОМЕТР | 2006 |
|
RU2298191C1 |
| US 6683358 B1, 27.01.2004. | |||

