Настоящее изобретение относится к ручному молокоотсасывателю и ручной молокоотсасывающей системе.
Документ WO-A-01/47577 описывает программируемое питаемое энергией молокоотсасывающее устройство. Описанное молокоотсасывающее устройство запрограммировано посредством записи данных управления на носитель или в носитель данных, который затем помещают в молокоотсасывающее устройство. Данные управления считываются с носителя данных и управляют циклом сцеживания.
Молокоотсасывающее устройство, описанное в документе WO-A-01/47577, имеет недостаток, состоящий в сложности процесса программирования.
Документ US-А-5571084 описывает питаемый энергией молокоотсасыватель, с которым пользователь имеет некоторую ограниченную возможность управления циклом сцеживания. Ограниченная возможность управления, которой обладает пользователь, сама по себе составляет проблему.
Документ ЕР-А-1502610 описывает питаемый энергией молокоотсасыватель, который действует в режиме обучения и работы.
Согласно настоящему изобретению получен ручной питаемый энергией молокоотсасыватель, содержащий:
корпус, имеющий принимающую грудь часть и средство для прикрепления сосуда для приема сцеженного молока;
поршневое средство, включающее пусковой элемент для осуществления сцеживания; и
двигательный узел, включающий электродвигатель и приводной механизм для возвратно-поступательного движения поршневого средства,
в котором приводной механизм конфигурирован для соединения с указанным пусковым элементом, когда он введен в контакт с ним.
Приводной механизм может быть конфигурирован таким образом, что он соединяется с пусковым элементом в ходе процесса установки двигательного элемента на корпусе. Если приводной механизм имеет кривошипно-шатунный механизм, предпочтительно, чтобы он имел кривошипно-шатунный механизм в положении его нижней мертвой точки и/или чтобы он соединялся с пусковым элементом будучи приводимым из его положения в нижней мертвой точке.
Предпочтительно, приводной механизм представляет собой кривошипно-шатунный механизм и включает собой шатун (средство соединительного штока), и указанное соединение с пусковым элементом осуществляется благодаря относительному упругому отклонению и восстановлению между шатуном и пусковым элементом. Однако могут использоваться другие механизмы для преобразования вращательного движения в линейное движение, например механизм с ходовым винтом. Линейное движение может осуществляться с использованием линейного электродвигателя вместо вращательного электродвигателя.
Предпочтительно, пусковой элемент представляет собой упруго отклоняемый выступ, отступающий от поршневого средства. Однако упругость может обеспечиваться шатуном.
Предпочтительно, выступ имеет утолщение, и шатун включает средство для приема указанного утолщения для соединения в рабочем положении шатуна и выступа. Однако утолщение может быть расположено на шатуне при помощи средства для приема утолщения, находящегося на выступе. Более предпочтительно, шатун имеет соединительную часть, сформированную для частичного окружения выступа, и средство для приема утолщения содержит выемку или паз в указанной соединительной части. Вместо этого могут использоваться другие соединительные механизмы, например упруго разъединяющиеся и магнитные соединения.
Предпочтительно, поршневое средство содержит упругую диафрагму, но может быть жестким поршнем. В случае с поршневым средством диафрагменного типа предпочтительно, чтобы:
приводной механизм представлял собой кривошипно-шатунный механизм и включал шатун;
пусковой элемент выступал от диафрагмы; и
шатун конфигурирован таким образом, что указанное соединение с пусковым элементом осуществлялось пусковым элементом, сначала отклоняемым и затем восстанавливающим первоначальное положение благодаря упругости диафрагмы.
Предпочтительно, в конструкцию включена схема управления, конфигурированная для осуществления сцеживания посредством чередования направления работы электродвигателя.
Корпус может содержать насосную камеру, в которой работает поршневое средство. Однако насосная камера может находиться в двигательном узле.
Питаемый батареей ручной молокоотсасыватель может питаться батареей и в этом случае может включать импульсный регулятор для регулирования напряжения, подаваемого к электродвигателю.
Согласно настоящему изобретению получен питаемый батареей ручной молокоотсасыватель, включающий электродвигатель насоса и импульсный регулятор для регулирования напряжения, подаваемого к электродвигателю насоса.
Согласно настоящему изобретению получена система ручного молокоотсасывателя, содержащая:
корпус, имеющий принимающую грудь часть, и средство для прикрепления к сосуду для приема сцеженного молока; и
взаимозаменяемые ручные и снабженные приводом пусковые узлы.
Каждый пусковой узел может включать соответствующую насосную камеру и в таком случае может быть применен канал для соединения насосной камеры с внутренним пространством корпуса. Канал может содержать трубку, которая может вставляться в отверстие в корпусе. Однако, предпочтительно, корпус включает насосную камеру и, более предпочтительно, применяется поршневое средство, которое работает в насосной камере при помощи как ручного, так и двигательного пусковых узлов.
Предпочтительно, поршневое средство включает пусковой элемент для осуществления сцеживания, двигательный приводной узел включает электродвигатель и приводной механизм для возвратно-поступательного движения поршневого средства, и приводной механизм конфигурирован для соединения с пусковым элементом, когда он введен в контакт с ним.
Приводной механизм может быть конфигурирован таким образом, что он соединяется с пусковым элементом в ходе процесса установки двигательного узла на корпусе.
Если приводной механизм имеет кривошипно-шатунный механизм, он, предпочтительно, имеет кривошипно-шатунный механизм в положении его нижней мертвой точки и/или соединенный с пусковым элементом при его запуске через его положение в нижней мертвой точке.
Предпочтительно, кривошипно-шатунный механизм включает шатун, и указанное соединение с пусковым элементом осуществляется относительным упругим отклонением и восстановлением исходного положения между шатуном и пусковым элементом.
Предпочтительно, пусковой элемент представляет собой упруго отклоняемый выступ, отступающий от поршневого средства. Однако упругость может обеспечиваться шатуном.
Предпочтительно, выступ имеет утолщение, и шатун включает средство для приема утолщения для соединения шатуна и выступа в рабочем положении. Однако утолщение может быть выполнено на шатуне со средством для приема утолщения, выполненного на выступе. Более предпочтительно, шатун имеет соединительную часть, сформированную для частичного окружения выступа, и средство для приема утолщения содержит выемку или паз в соединительной части. Вместо указанных могут использоваться другие соединительные механизмы, например подпружиненные и магнитные соединения.
Предпочтительно, поршневое средство содержит упругую диафрагму, но может быть жестким поршнем. В случае с ручным молокоотсасывающим поршневым средством, предпочтительно, чтобы:
приводной механизм содержал кривошипно-шатунный механизм и включал шатун;
пусковой элемент выступал от диафрагмы; и
шатун был конфигурирован таким образом, чтобы указанное соединение с пусковым элементом сначала осуществлялось посредством отклонения пускового элемента и затем его восстановления благодаря упругости диафрагмы.
Предпочтительно, включена схема управления, конфигурированная для осуществления сцеживания посредством чередования направления работы электродвигателя.
Ручной молокоотсасыватель может питаться от батареи и в таком случае может включать импульсный регулятор для регулирования напряжения, подаваемого к электродвигателю.
Теперь будет описан вариант осуществления настоящего изобретения на примере и со ссылками на прилагаемые чертежи, на которых:
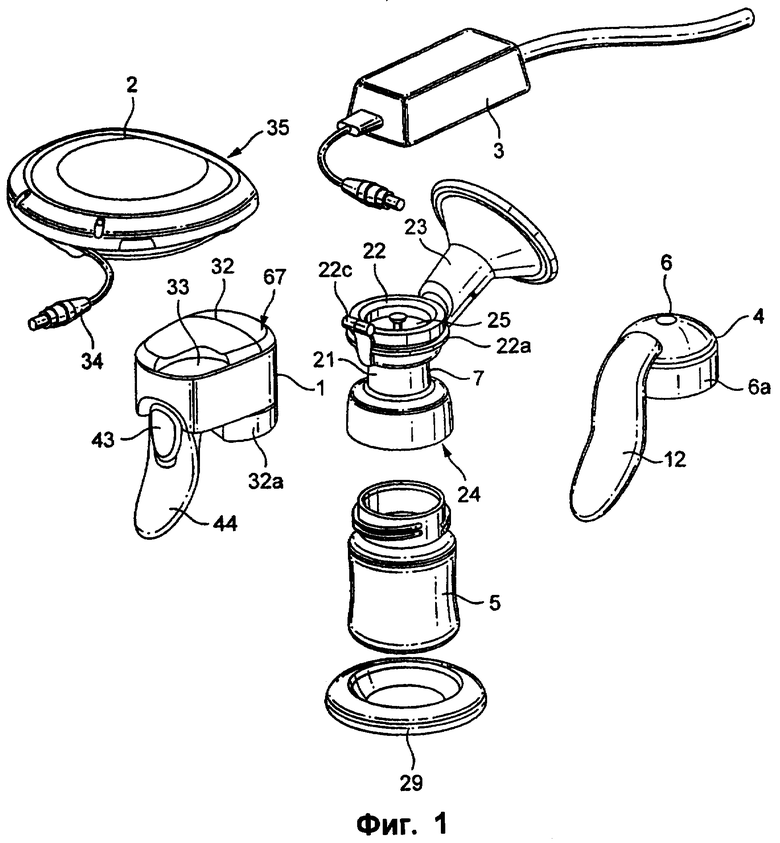
фиг.1 - вид молокоотсасывающей системы, соответствующей настоящему изобретению;
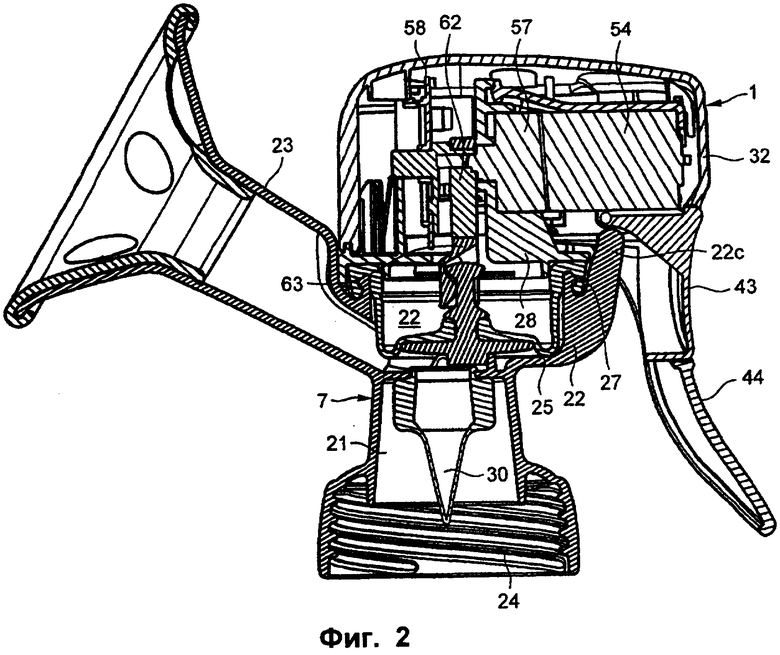
фиг.2 - вид сбоку сечения питаемой энергией головки, показанной на фиг.1, установленной на корпусе;
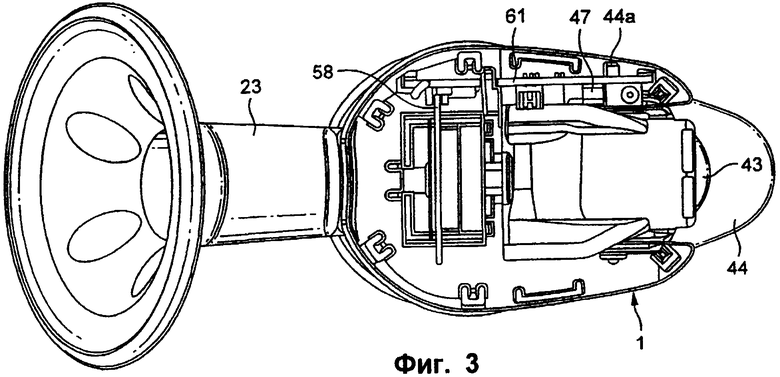
фиг.3 - вид в плане питаемой энергией головки и части корпуса при удалении крышки головки;
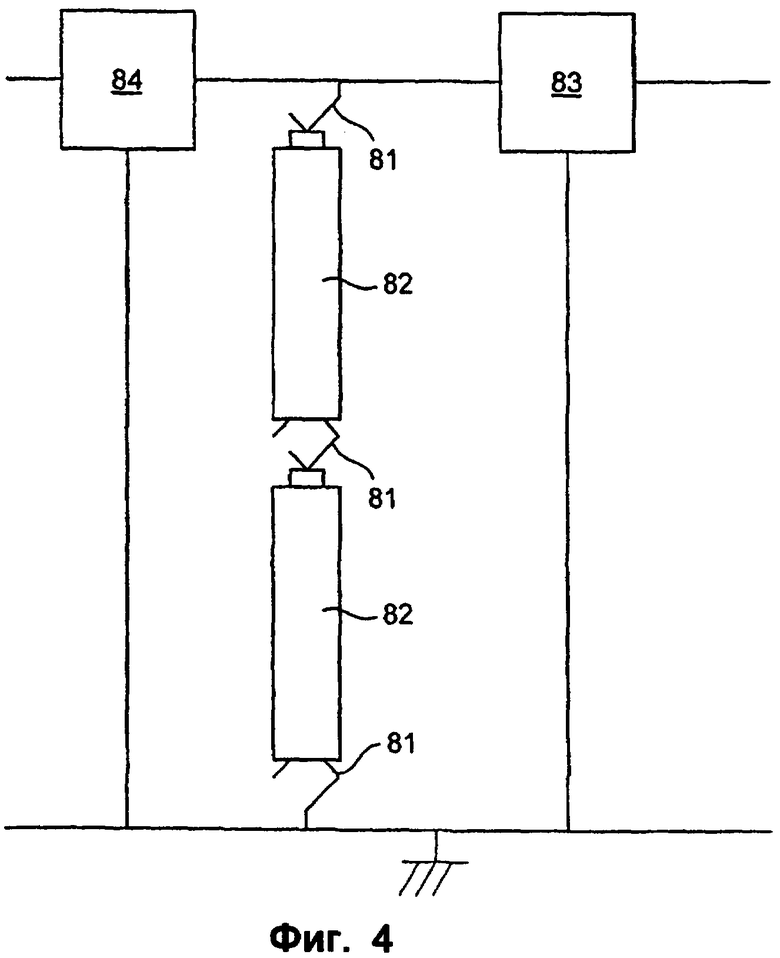
фиг.4 - блок-схема пакета батарей, показанного на фиг.1;
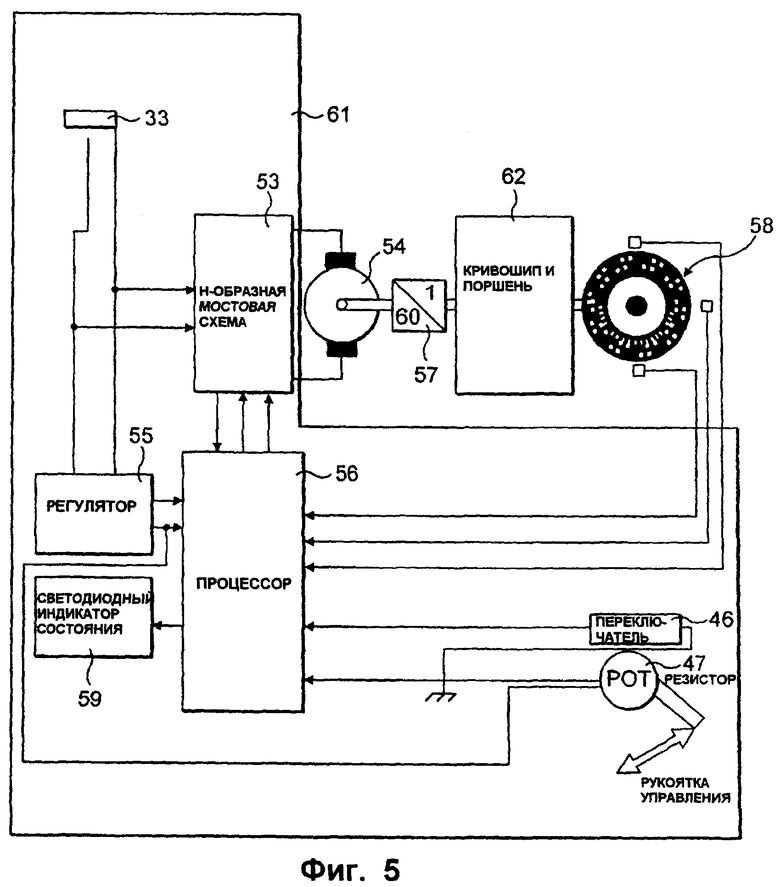
фиг.5 - блок-схема питаемой энергией головки и ее системы управления;
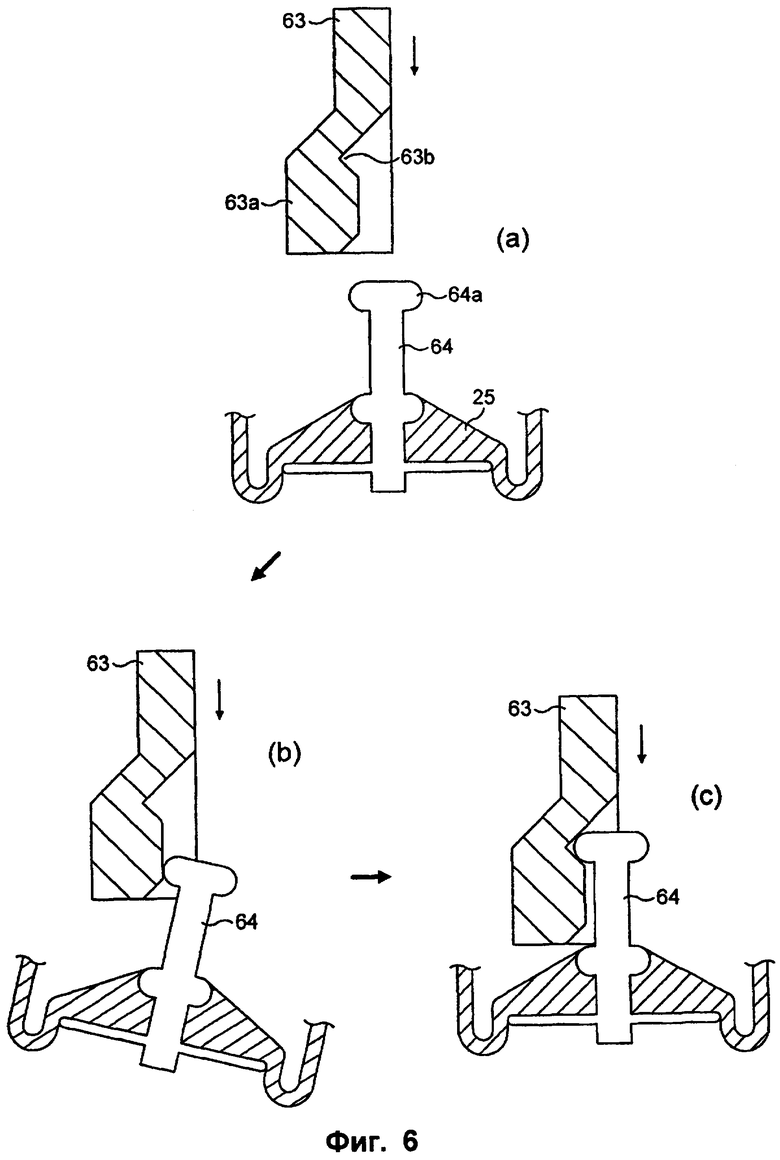
фиг.6(a)-6(c) - процесс соединения шатуна питаемой энергией головки, показанной на фиг.2, с ее диафрагмой;
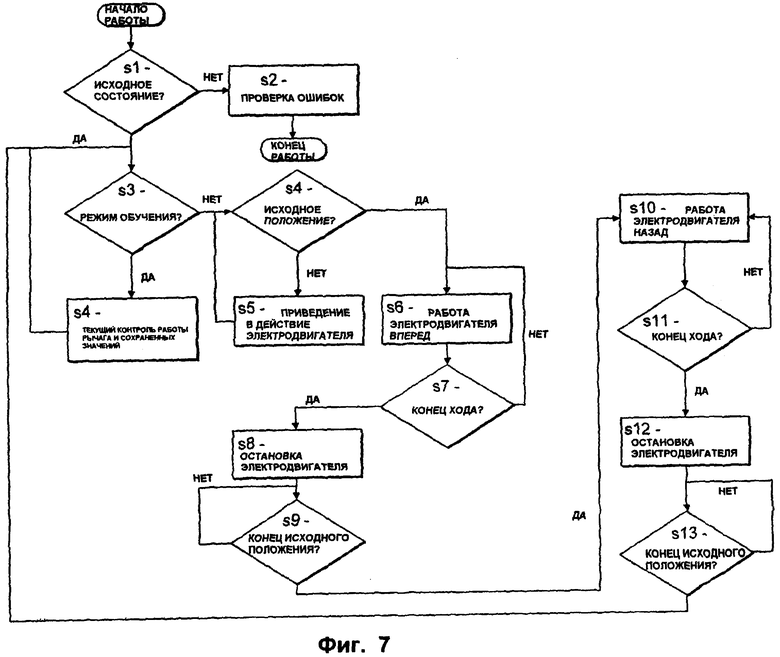
фиг.7 - блок-схема, иллюстрирующая действие системы, показанной на фиг.1;
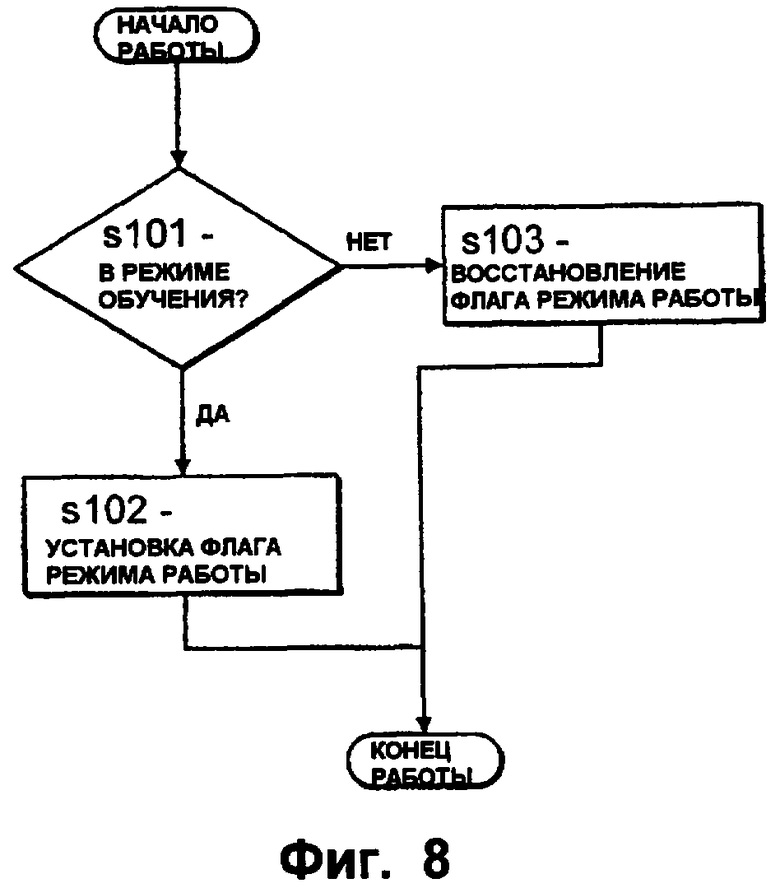
фиг.8 - блок-схема, показывающая изменение режима системы, показанной на фиг.1;
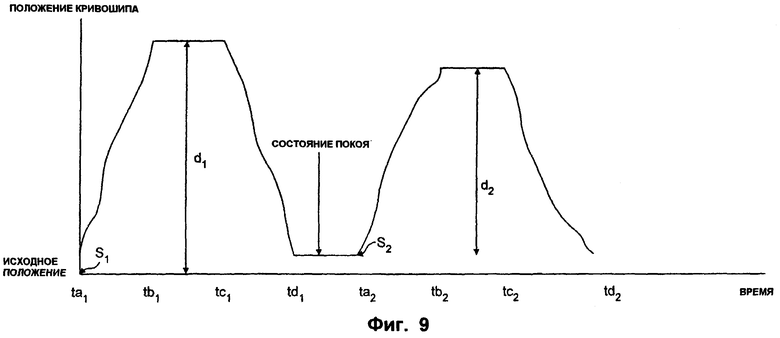
фиг.9 - график, иллюстрирующий два типичных цикла сцеживания в ходе действия в режиме "обучения" системы, показанной на фиг.1;
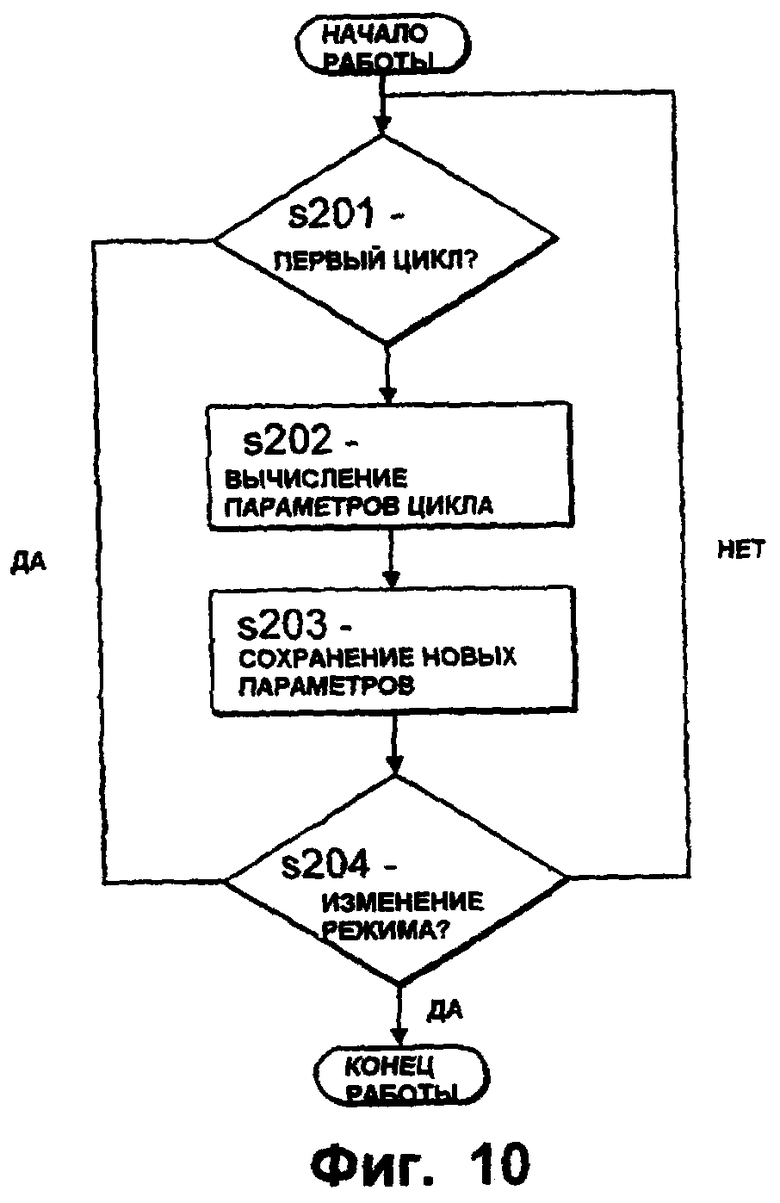
фиг.10 - блок-схема, подробно иллюстрирующая часть действия в режиме "обучения";
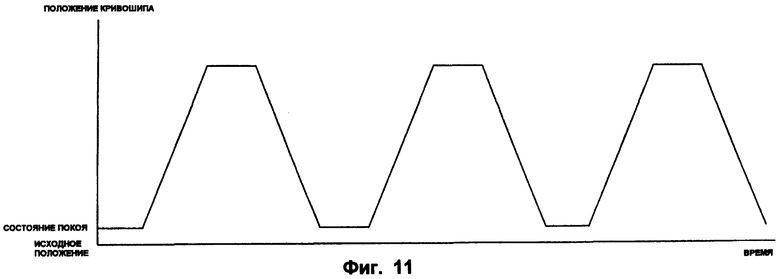
фиг.11 - график, иллюстрирующий три цикла сцеживания в режиме "работы" системы, показанной на фиг.1;
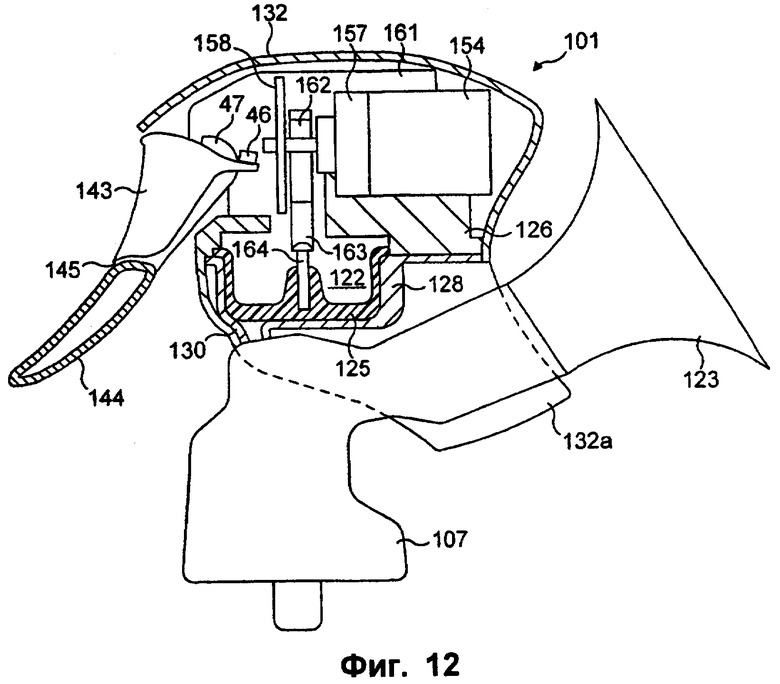
фиг.12 - вид сбоку сечения второй питаемой энергией головки, соответствующей настоящему изобретению; и
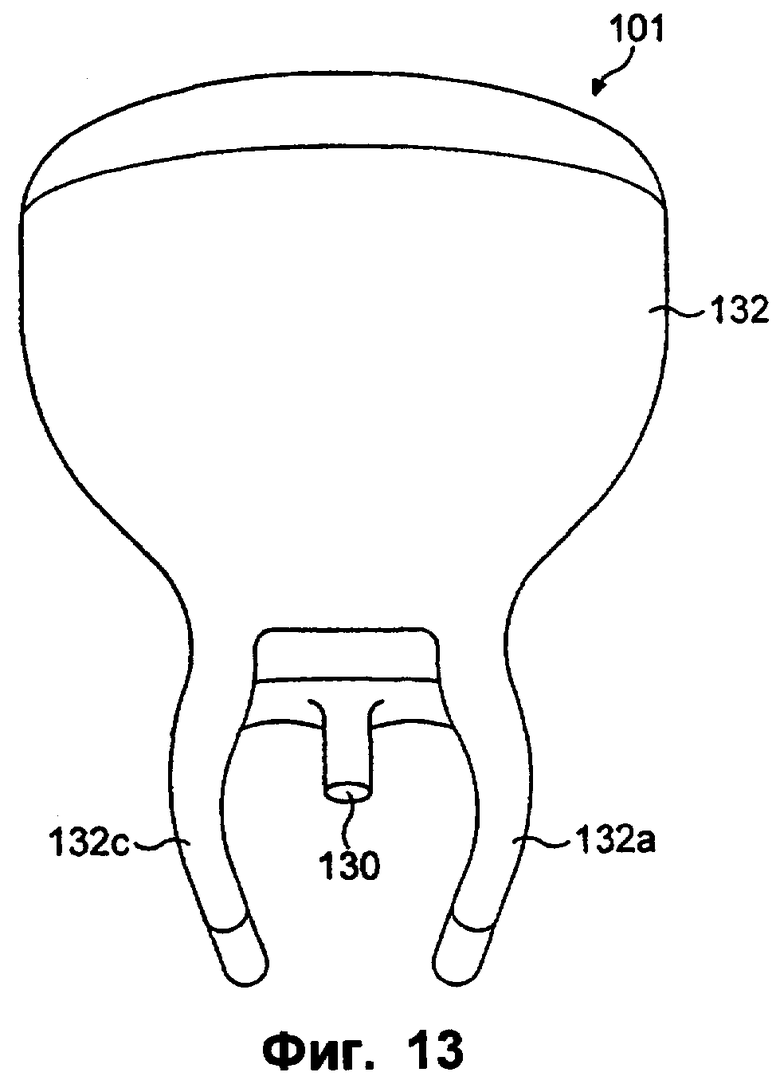
фиг.13 - вид спереди второй питаемой энергией головки, показанной на фиг.12.
Как показано на фиг.1, молокоотсасывающая система, соответствующая настоящему изобретению, содержит питаемую энергией головку 1, батарейный источник 2 питания, сетевой источник 3 питания, ручную головку 4, рожок 5, основание 29 для рожка 5 и корпус 7.
Ручная головка 4, корпус 7 и рожок 5 очень похожи на компоненты сцеживающих устройств Avent (зарегистрированная торговая марка), ISIS (зарегистрированная торговая марка).
Корпус 7 содержит горлышко 21, крышку 22, удерживаемую на горлышке 21, и воронку 23, отступающую от стороны крышки 22. Основание горлышка расширено и снабжено внутренней резьбой 24 (см. фиг.2) для навинчивания корпуса 7 на рожок 5. Воронка 23 отклонена вверх и при использовании принимает ниппель и окружающую грудь часть для пользователя и таким образом уплотнена. От открытого дистального конца воронки 23 через основание крышки 22 и горлышко 21 ведет проход к открытому нижнему концу горлышка 21. Между крышкой 22 и горлышком 21 расположен плоский клапан 30 (см. фиг.2). Клапан 30 закрывается, когда давление в крышке 22 понижается относительно давления в горлышке 21, и открывается, когда давление в крышке 22 повышается до уровня выше давления в горлышке 21.
Ручная головка 4 содержит простую куполообразную крышку 6 и рычаг 12. Куполообразная крышка 6 имеет юбки 6a на противоположных сторонах, которые защелкиваются поверх соответствующих выступающих в радиальном направлении фланцев 22a на крышке 22 корпуса 7. Рычаг 12 предназначен для приведения в действие диафрагмы 25, установленной в крышке 22 корпуса 7, и конфигурирован для поворота на точке опоры, образованной выступом 22c, поднимающимся от заднего края крышки 22 корпуса 7.
Дополнительную информацию, относящуюся к действию ручной головки 4 в комбинации с корпусом 7 и рожком 5, можно получить в документе ЕР-А-0733376.
Как показано на фиг.2, диафрагма 25, вставленная в крышку 22, имеет форму колпачка и сформирована из эластомерного материала. Кромка диафрагмы 25 отогнута назад для формирования канала 27, который принимает кромку крышки 22 для закрепления диафрагмы в крышке 22.
Как показано также на фиг.3, питаемая энергией головка 1 содержит основание 28, которое достаточно велико для того, чтобы закрывать внутреннее пространство диафрагмы 25, и имеет кольцевой фланец, который плотно посажен на верхнюю часть диафрагмы, при этом крышка 32 защелкивается на основании 28. Крышка 32 имеет две юбки 32a (см. фиг.1), которые защелкиваются поверх отступающих в радиальном направлении фланцев 22a на крышке 22.
Рычаг 43 и рукоятка 44 проходят от задней части корпуса 26 через вырез в крышке 32. Общая форма рычага 43 и рукоятки 44 имеет сходство с формой рычага 12 управления ручной головки 4. Рукоятка 44 имеет продольный паз на его проксимальном конце, и рычаг 43 проходит вдоль паза 45, по существу заполняя его. Проксимальный конец рукоятки 44 может поворачиваться внутри крышки 32.
Рычаг 43 с возможностью поворота установлен внутри крышки 32 таким образом, что нажатие на рычаг 43 к крышке 22 вызывает замыкание переключателя 46 (см. фиг.5).
Рукоятка 44 нагружена в направлении наружу пружиной (не показана), расположенной внутри крышки 32.
Вновь возвращаясь к фиг.1, отметим, что батарейный источник 2 питания может находиться в пакете (не показан). Питаемая энергией головка 1 имеет гнездо 33, которое открыто сквозь крышку 32, и батарейный источник питания 2 имеет разъем 34, который вставляется в гнездо 33 для питания энергией головки 1.
Сетевой блок 3 питания является обычным блоком и может вставляться непосредственно в гнездо 33 в питаемой энергией головке 1 в качестве альтернативы батарейному источнику питания. Кроме того, сетевой источник 3 питания может быть включен в гнездо 35 батарейного источника 2 питания для подзарядки находящихся там батарей, и энергия сетевого блока 3 питания может быть передана через батарейный источник 2 питания питаемой энергией головке 1.
Как показано на фиг.4, батарейный источник 2 питания включает клеммы 81 для создания контакта с батареями 82 (две показаны, но их может быть больше), импульсный регулятор 83 и схему 84 зарядки. Использование импульсного регулятора 83 приводит к более последовательному действию насоса, когда батареи 82 разряжаются.
Возвращаясь к фиг.2 и 3 и фиг.5, отметим, что питаемая энергией головка 1 содержит печатную плату 61, которая содержит схему управления узлом, электродвигатель 54, кривошипно-шатунный механизм 62, редукционную передачу 57 и устройство 58 кодирования по углу поворота.
Энергия, подаваемая через гнездо 33, поступает в H-образную мостовую схему 53, которая подает энергию к электродвигателю 54 и к регулятору 55. Стабилизированная выходная мощность от регулятора 55 питает схему 56 обработки, которая встроена в микроконтроллер.
Электродвигатель 54 приводит в действие кривошипно-шатунный механизм 62 назад и вперед в диапазоне до 180° через редукционную передачу 57.
Кривошипно-шатунный механизм 62 включает шатун 63, который соединяется с выступом 64, отступающим от диафрагмы 25. Головка выступа 64 сформирована в виде сплющенного утолщения.
Как показано на фиг.6(a)-6(c), нижний конец 63a шатуна 63 имеет полукруглое сечение. Вблизи нижнего конца шатуна 63 сформирован поперечный паз 63b для приема утолщения 64a на верхнем конце выступа 64.
Питаемая энергией головка 1 установлена на крышке 22 посредством ее совмещения с крышкой 22 и введения в зацепление нажимом. В ходе этого процесса, если шатун 63 находится в нижней мертвой точке, основание шатуна 63 отклоняет выступ 64 (фиг.6(b)) и, когда утолщение 64a выступа 64 совмещается с пазом 63b в шатуне 63, упругость диафрагмы 25 перемещает утолщение 64a выступа 64 в паз 63b, возвращая выступ 64 в его вертикальное положение и соединяя в рабочем положении шатун 63 и выступ 64 (фиг.6(c)).
Если шатун 63 не находится в нижней мертвой точке, когда питаемая энергией головка 1 установлена на крышке 1, шатун 63 входит в зацепление с выступом 64, когда шатун проходит через нижнюю мертвую точку впервые, после того как головка 1 установлена на крышке 22. В этом случае, когда шатун 63 проходит через нижнюю мертвую точку, основание шатуна 63 отклоняет выступ 64 (фиг.6(b)) и, когда утолщение 64a выступа 64 совмещается с пазом 63b в шатуне 63, упругость диафрагмы 25 перемещает утолщение 64a выступа 64 в паз 63b, возвращая выступ 64 в его вертикальное положение, в рабочем положении соединяя шатун 63 и выступ 64 (фиг.6(c)).
Упругость диафрагмы 25 также позволяет снимать корпус 26 с крышки 22.
В отличие от этого ручная головка 4 установлена посредством зацепления выступа 64 с вилкой на одном конце рычага 12 управления 12 таким образом, что утолщение 64a выступа 64 находится над вилкой установки рычага 12 на его точку опоры и защелкивания на крышке 6. Таким образом, когда установленный рычаг 12 управления используется пользователем, выступ 64 поднимается, поднимая с собой большую часть диафрагмы 25. Когда пользователь отпускает рычаг 12 управления, диафрагма 25 возвращается в ее исходное положение.
Как показано на фиг.2, 3 и 5, когда питаемая энергией головка 1 установлена на крышке 22, работа электродвигателя 54 вызывает подъем и опускание диафрагмы 25 кривошипно-шатунным механизмом 62 и осуществление сцеживания. Положение кривошипно-шатунного механизма 62 считывается устройством 58 кодирования по углу поворота.
Светодиодный индикатор 59 состояния управляется выходным сигналом от схемы 56 управления для обеспечения обратной связи для пользователя. Свет от светодиодного индикатора 59 проводится от печатной платы 61 и к линзе 67 (см. фиг.1) световодом (не показан) таким образом, что он может быть виден для пользователя.
Переключатель 46 соединен между входом прерывания схемы 56 обработки и землей. Поворотное устройство рукоятки 44 включает штырек 44a, который проходит через подстроечный резистор 47, установленный на печатной плате 61, таким образом, что движок резистора 47 перемещается, когда рукоятка 44 поворачивается. Резистор 47 соединен между положительным выходом напряжения регулятора 55 и землей, и движок резистора 47 соединен с входом аналого-цифрового преобразователя схемы 56 обработки.
Схема 56 обработки выдает сигналы скорости и направления электродвигателя в H-образную мостовую схему 53 для управления работой электродвигателя 54.
Теперь будет описана работа системы.
Как показано на фиг.7, когда система включена, схема 56 обработки определяет, находится ли кривошип в его исходном положении, посредством сравнения выходного сигнала устройства 58 кодирования по углу поворота с контрольным значением исходного положения, то есть 0 (этап s1). Если кривошипно-шатунный механизм 62 не находится в его исходном положении, схема обработки выполняет программу проверки ошибок и сигнализирует о любых ошибках, используя светодиодный индикатор 59 (этап s2), и останавливает работу системы.
Система вводит режим "обучения" по умолчанию. Однако, как показано на фиг.7, замыкание переключателя 46, когда система находится в режиме "обучения", переключает ее в режим "работы" посредством установки флага режима работы (этапы s101 и s102), и замыкание переключателя 46, когда система находится в режиме работы, будет переключать ее обратно в режим "обучения" посредством восстановления флага режима работы (этапы s101 и s103).
В режиме "обучения" (этап s3) электродвигатель 54 управляется схемой 56 обработки в простой замкнутой сервосистеме (этап s4). Когда пользователь нажимает на рукоятку 44 по направлению к корпусу 7, движок резистора 47 перемещается, изменяя выходное напряжение резистора 47. Это значение напряжения переводится в цифровую форму и сравнивается с выходными данными устройства кодирования по углу поворота, и любая погрешность используется для генерирования управляющего сигнала для приведения в действие электродвигателя 56 для устранения погрешности. Нажатие рукоятки 44 вызывает перемещение электродвигателем 54 диафрагмы 25 и приложение всасывающей силы к принимающей грудь воронке 23, и предоставление возможности рукоятке 44 переместиться в ее исходное положение вызывает перемещение электродвигателем 54 диафрагмы 25 вниз с прекращением всасывания. Таким образом, давление в воронке 23 задается положением рукоятки 44, и пользователь может экспериментировать, нажимая и отпуская рукоятку 44, пока не будет обнаружен удобный и эффективный цикл.
Как показано на фиг.9, в ходе действия в режиме "обучения" схема 56 обработки осуществляет текущий контроль момента начала каждого такта (ta) впуска, конца каждого такта (tb) впуска, начала каждого такта (tc) релаксации и конца каждого такта (td) релаксации. Схема обработки 56 также осуществляет текущий контроль стартового положения (s) и длин (d) каждого такта впуска.
Как показано на фиг.10, в конце второго и каждого последующего такта релаксации, то есть при tdn (этап s201), схема 56 обработки вычисляет скорость такта впуска (то есть d/(tb-ta)), скорость такта релаксации (то есть d/td-tc)) и период покоя предыдущего цикла (если он есть), рассчитанные на основе отслеженных моментов текущих и предшествующих циклов (этапы s202), и сохраняются (этап s203). Затем проверяется состояние флага рабочего режима (этап s204), и если режим изменился на "рабочий" режим, режим обучения остается или иначе процесс возвращается к этапу s101.
Когда система переключена в "рабочий" режим пользователем, замыкающим переключатель 46, схема 56 обработки управляет электродвигателем 54 в соответствии с сохраненными скоростями и периодами и сохраненными значениями хода и глубины.
Как показано на фиг.7 и 11, если система задана для режима работы (этап s3), схема 56 обработки определяет, находится ли коленчатый вал в положении покоя, то есть положении начала такта впуска (этап s4), и, если это не так, выдает поток импульсов в схему H-образной мостовой схемы 53 для задания скорости электродвигателя 54 и сигнал направления, в результате чего диафрагма 25 перемещается с сохраненным средним темпом всасывания (этап s5) до достижения положения покоя. Когда коленчатый вал находится в положении покоя (этап s4), схема обработки 56 начинает выдавать поток импульсов управления скоростью электродвигателя в Н-образную мостовую схему 53 вместе с сигналом работы вперед, вызывающим работу электродвигателя 54 в первом направлении (этап s6). Эти импульсы и сигнал работы вперед выдаются, пока выходные данные устройства 58 кодирования по углу поворота не будут соответствовать сумме значения положения покоя и значения глубины хода (этап s7), и в этот момент электродвигатель останавливается (этап s8). Когда электродвигатель остановлен, схема 56 обработки больше не выдает импульсов управления скоростью до истечения периода, соответствующего сохраненному значению периода выдержки всасывания (этап s9). Когда период выдержки всасывания истекает (этап s9), схема 56 обработки выдает импульсы управления скоростью, соответствующие сохраненной средней скорости хода релаксации, в Н-образную мостовую схему 53 вместе с сигналом работы назад (этап s9). Эти сигналы вызывают работу электродвигателя во втором, противоположном направлении, допуская расслабление диафрагмы 25, и прекращаются, когда устройство 58 кодирования по углу поворота 58 указывает, что диафрагма 25 возвратилась в ее положение покоя (этапы s11 и s12). Схема 56 обработки в этом случае больше не выдает никаких дальнейших сигналов управления электродвигателем, и когда сохраненное среднее значение периода покоя истекло (этап s13), он возвращается к этапу s3.
Система может использоваться пользователем в режиме "обучения" без переключения в режим "работы". Таким образом, система также обеспечивает получение молокоотсасывателя с силовым приводом, который обеспечивает для пользователя непрерывное управление циклом сцеживания как с ручными молокоотсасывателями, но без физического усилия, требуемого с ручным молокоотсасывателем.
Будет понятно, что настоящее изобретение может быть осуществлено другими способами.
Например, циклы режима "работы" могут следовать за циклом режима "обучения" с большей точностью воспроизведения. Это может быть достигнуто благодаря записи положения коленчатого вала во множестве моментов в ходе каждого хода в режиме "обучения". Цикл режима "работы" может быть установлен взятием средних значений параметров цикла, полученных от множества циклов режима "обучения". Для удобства средство ввода пользователя имитирует привод ручного молокоотсасывателя. Это устройство может быть заменено ножным переключателем и педалью, подобным таковым у швейной машины, или отдельно манипулируемым блоком управления. Пользовательские входные команды могут передаваться в схему обработки дистанционно, например, с использованием инфракрасных лучей.
Альтернативой комбинации параметра начала всасывания и параметра длины хода могут быть параметр положения покоя и параметр поддержания положения всасывания.
Второй вариант осуществления изобретения в электрическом выполнении такой же, как и первый описанный выше вариант осуществления изобретения, но физически конфигурирован для использования на корпусе 107 ручного молокоотсасывателя Medela (зарегистрированная торговая марка) Harmony.
Как показано на фиг.12 и 13, вторая питаемая энергией головка 101 содержит основание 128, которое включает насосную камеру 122, содержащую диафрагму 125, раму 126, установленную на основании 128, и крышку 132, которая охватывает основание 128 и раму 126. Крышка 132 имеет пару боковин 132a, которые защелкнуты вокруг основания воронки 123 корпуса молокоотсасывателя 107, для удерживания питаемой энергией головки 101 на месте. От нижней части основания 128 отступает трубка 130 для вставки в соответствующее отверстие в корпусе 107 молокоотсасывателя. Верхний конец трубки 130 открыт в насосную камеру 122.
Рычаг 143 и рукоятка 144 проходят от задней части корпуса 126 через вырез в крышке 132. Полная форма рычага 143 и рукоятки 144 подобна рычагу 12 управления ручной головки 4, описанной выше. Рукоятка 144 имеет продольный паз 145 в ее проксимальном конце, и рычаг 143 проходит вдоль паза 145, по существу заполняя его. Проксимальный конец рукоятки 144 может поворачиваться внутри крышки 132.
Рычаг 143 установлен с возможностью поворота внутри крышки 132 таким образом, что нажим на рычаг 143 к корпусу молокоотсасывателя 107 замыкает переключатель 46 (см. фиг.5).
Рукоятка 144 подпружинена наружу пружиной (не показана) внутри крышки 132 и в рабочем положении соединена с движком резистора 47 (см. также фиг.5).
Питаемая энергией головка 101 содержит печатную плату 161, которая имеет схему управления блока, электродвигатель 154, кривошипно-шатунный механизм 162, редукционную передачу 157 и устройство 158 кодирования по углу поворота.
Электродвигатель 154 приводит в действие кривошипно-шатунный механизм 162 назад и вперед в диапазоне до 180° через редукционную передачу 157.
Кривошипно-шатунный механизм 162 включает шатун 163, который соединен с выступом 164, отступающим от диафрагмы 125.
Действие второй питаемой энергией головки 101 для сцеживания молока аналогично действию первой снабженной энергией головки 1, описанной выше.
Будет понятно, что может быть сделано много модификаций вариантов осуществления изобретения, описанных выше. Например, диафрагма может быть заменена жестким поршнем или может инвертироваться посредством приведения электродвигателем периферии диафрагмы вверх и вниз. Как упомянуто выше, может использоваться механизм ходового винта для приведения в действие поршня или диафрагмы. Потребность в кривошипно-шатунном механизме, винтовом механизме или любом другом механизме преобразования вращательного движения в прямолинейное движение может быть исключена посредством использования линейного электродвигателя вместо вращательного электродвигателя, описанного выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОЛОКООТСАСЫВАТЕЛЬ С ЭЛЕКТРОПРИВОДОМ | 2004 |
|
RU2377023C2 |
| РУЧНОЙ МОЛОКООТСАСЫВАТЕЛЬ | 2012 |
|
RU2607181C2 |
| МОЛОКООТСАСЫВАЮЩЕЕ УСТРОЙСТВО | 2007 |
|
RU2427391C2 |
| ВСПОМОГАТЕЛЬНАЯ РУКОЯТКА | 2010 |
|
RU2522405C2 |
| ПРИВОД ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ | 2015 |
|
RU2614315C1 |
| РУЧНАЯ МАШИНА | 2008 |
|
RU2482957C2 |
| ПОРШНЕВОЙ КОМПРЕССОР ИЛИ НАСОС И СИСТЕМА ПРИВОДА ПЕРЕНОСНОГО ИНСТРУМЕНТА, ВКЛЮЧАЮЩАЯ ПОРШНЕВОЙ КОМПРЕССОР | 2007 |
|
RU2451834C2 |
| ЭЛЕКТРИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2529434C2 |
| ДВИГАТЕЛЬ С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ | 1991 |
|
RU2103790C1 |
| ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2093704C1 |
Изобретение относится к медицинской технике. Ручной питаемый электрической энергией молокоотсасыватель содержит корпус, имеющий принимающую грудь часть и средство для прикрепления сосуда для приема сцеженного молока; поршневое средство, включающее пусковой элемент для осуществления сцеживания; и двигательный узел, включающий электродвигатель и приводной механизм для возвратно-поступательного движения поршневого средства. Приводной механизм конфигурирован для соединения с пусковым элементом, когда он введен в контакт с ним. Приводной механизм конфигурирован таким образом, что он соединен с пусковым элементом в ходе процесса установки двигательного узла на корпусе. Изобретение обеспечивает упрощение молокоотсасывателя за счет того, что соединение двигателя и пускового элемента достигается простой установкой двигательного узла на корпусе. 10 з.п. ф-лы, 13 ил.
1. Ручной питаемый электрической энергией молокоотсасыватель, содержащий:
корпус, имеющий принимающую грудь часть и средство для прикрепления сосуда для приема сцеженного молока;
поршневое средство, включающее пусковой элемент для осуществления сцеживания; и
двигательный узел, включающий электродвигатель и приводной механизм для возвратно-поступательного движения поршневого средства,
в котором приводной механизм конфигурирован для соединения с пусковым элементом, когда он введен в контакт с ним, при этом приводной механизм конфигурирован таким образом, что он соединен с пусковым элементом в ходе процесса установки двигательного узла на корпусе.
2. Ручной питаемый электрической энергией молокоотсасыватель по п.1, в котором приводной механизм представляет собой кривошипно-шатунный механизм и содержит шатун, и указанное соединение с пусковым элементом осуществляется благодаря относительному упругому отклонению и восстановлению положения между шатуном и пусковым элементом.
3. Ручной питаемый электрической энергией молокоотсасыватель по п.2, в котором пусковой элемент представляет собой упруго отклоняемый выступ, отступающий от поршневого средства.
4. Ручной питаемый электрической энергией молокоотсасыватель по п.3, в котором выступ имеет утолщение, и шатун включает средство для приема утолщения для соединения в рабочем положении шатуна и выступа.
5. Ручной питаемый электрической энергией молокоотсасыватель по п.4, в котором шатун имеет соединительную часть, сформированную для частичного окружения выступа, и средство для приема утолщения содержит выемку или паз в соединительной части.
6. Ручной питаемый электрической энергией молокоотсасыватель по п.1, в котором поршневое средство содержит упругую диафрагму.
7. Ручной питаемый электрической энергией молокоотсасыватель по п.6, в котором:
приводной механизм представляет собой кривошипно-шатунный механизм и включает шатун;
пусковой элемент выступает от диафрагмы; и
шатун конфигурирован таким образом, что указанное соединение с пусковым элементом осуществляется пусковым элементом, сначала отклоняемым и затем восстанавливающим первоначальное положение благодаря упругости диафрагмы.
8. Ручной питаемый электрической энергией молокоотсасыватель по п.1, включающий схему управления, конфигурированную для осуществления сцеживания посредством чередования направления работы электродвигателя.
9. Ручной питаемый электрической энергией молокоотсасыватель по п.1, в котором корпус содержит насосную камеру, в которой работает поршневое средство.
10. Ручной питаемый электрической энергией молокоотсасыватель по п.1, в котором источником электрической энергии является батарея.
11. Ручной питаемый электрической энергией молокоотсасыватель по п.10, включающий импульсный регулятор для регулирования напряжения, подаваемого к электродвигателю.
| ЕР 0733376 А, 25.09.1996 | |||
| Способ регенерации отработанной водомасляной эмульсионной смазочно-охлаждающей жидкости | 1987 |
|
SU1502610A1 |
| US 2005068459 A1, 31.03.2005 | |||
| US 6673036 B1, 06.01.2004 | |||
| DE 10132516 A1, 30.01.2003 | |||
| US 2004087898 A1, 06.05.2004 | |||
| Молокоотсос | 1985 |
|
SU1456158A1 |

