Предлагаемое изобретение относится к устройствам управления вооружением, а более конкретно - к оборудованию рабочих мест операторов вооружения боевых машин, например танков, БМП, ПТРК и других объектов.
Для поражения цели необходимо, прежде всего, решить задачу встречи снаряда (ракеты) с целью. Эта задача решается путем придания вооружению такого положения перед выстрелом, которое обеспечило бы совмещение траектории снаряда (ракеты) с целью в момент ее достижения снарядом (ракетой). Это обеспечивается различными приводами наведения, прицельными устройствами и другими приборами, одной из основных функций которых является поиск и визирование цели. От эффективности прицеливания (прежде всего точности визирования) зависит и эффективность вооружения, а вместе с тем и эффективность стрельбы в целом.
Известна, например, прицельно - поисковая система (ППС) оператора вооружения танка Т-62 (см., например, «Руководство по материальной части и эксплуатации танка Т-62», Воениздат, М., 1968, 195-210). Она содержит пульт управления оператора, дальномер и оптически сопряженные блок формирования прицельной марки и оптическую формирующую систему. В этой системе при стрельбе в обычных условиях с места по неподвижной цели визирование осуществляется путем совмещения точки визирования (прицеливания) на цели с визирным индексом (прицельной маркой), а изменение условий стрельбы учитывается перемещением визирного индекса (прицельной марки) прицела на определенную угловую величину до выстрела. При этом возникает угловое рассогласование между линией визирования и вооружением (осью ствола). В месте с этим возникает недостаток: линия визирования отклоняется от оптической оси поля зрения прицельного устройства, что сопровождается ухудшением видимости и снижением разрешающей способности оптической системы. Кроме того, при стрельбе в условиях, отличных от обычных (стрельба с ходу, по движущейся цели, стрельба при сильном боковом ветре и т.д.), приходится все равно вводить поправку в положение линии визирования относительно цели, что вызывает смещение визирного индекса (прицельной марки) относительно цели. В этом случае однообразие визирования нарушается, снижается его точность, а вместе с тем резко падает и эффективность стрельбы.
Известна также прицельно-поисковая система оператора вооружения (см. например, А.Н.Латухин "Противотанковое вооружение", Воениздат, МО СССР, М., 1974, с.218-235), являющаяся прототипом предлагаемой системы. Она содержит пульт управления оператора, дальномер, вход которого соединен с первым выходом пульта управления оператора, и оптически сопряженные блок формирования прицельной марки и оптическую формирующую систему, первый вход которой соединен со вторым выходом первого пульта управления оператора, а второй - с выходом дальномера.
В этой системе визирование заключается в определении и установке исходных размеров поля зрения (оптической формирующей системы), совмещении его оптической оси с объектом визирования и удержании его (поля зрения) в таком положении в течение заданного времени (пока снаряд или ракета не достигнут цели). В этом устройстве, в отличие от других известных (см. выше), поправки на отклонение условий стрельбы от нормальных вводятся в положение вооружения по отношению к прицельной марке (визирному индексу), а не наоборот, совмещение оптической оси (линии визирования) с целью при визировании (прицеливании) и ввод поправок в положение вооружения относительно линии визирования (прицеливания) обеспечивает однообразие при прицеливании во всех условиях стрельбы, предотвращает ухудшение видимости и снижение разрешающей способности оптической системы (так как линия визирования совмещена с оптической осью оптической формирующей системы), а вместе с этим и улучшает эргономические условия при визировании.
Однако эта прицельно-поисковая система оператора вооружения также имеет недостатки. Несмотря на однообразие визирования при каждом выстреле в различных условиях и по различным целям оператор должен удерживать линию визирования (прицеливания) на цели (на точке прицеливания) в течение продолжительного времени, чтобы обеспечить по времени ввод в положение вооружения всех поправок. Это время довольно продолжительное и составляет около 2-3 с. Оно еще более увеличивается, если стрельба производится управляемой ракетой. Например, при стрельбе управляемой ракетой на максимальную дальность оператор вынужден удерживать линию визирования на цели более 15 с (см., например, А.Н.Латухин «Противотанковое вооружение», М., Воениздат, 1974, с.192-235). Такое визирование, несмотря на то что оно точнее и проще, чем в танке Т-62, вызывает повышенную напряженность оператора, в частности его зрительного аппарата, что очень часто приводит к потере цели или прицельной марки в условиях действия пыледымовых и световых помех.
Целью настоящего изобретения является улучшение условий, повышение помехоустойчивости и точности визирования (прицеливания).
Указанная цель достигается тем, что в известную прицельно-поисковую систему оператора вооружения, содержащую первый пульт управления оператора, дальномер, вход которого соединен с первым выходом пульта управления оператора, и оптически сопряженные блок формирования прицельной марки и оптическую формирующую систему, первый вход которой соединен со вторым выходом первого пульта управления оператора, а второй - с выходом дальномера, введены датчик квалификации оператора, второй пульт управления оператора, вход которого соединен с первым выходом первого пульта управления оператора, датчик типа прицела, датчик времени инерции зрительного аппарата оператора, последовательно соединенные датчик типа объекта визирования, блок изменения масштаба, второй вход которого соединен с первым выходом датчика типа прицела, первый делитель, второй вход которого соединен с выходом дальномера, первый сумматор, второй вход которого соединен с выходом датчика квалификации оператора, привод, второй вход которого соединен с первым выходом второго пульта управления оператора, и оптически сопряженную с оптической формирующей системой апертурную диафрагму с регулируемой апертурой, последовательно соединенные датчик типа боеприпаса, второй делитель, второй вход которого соединен с выходом дальномера, второй сумматор, второй и третий входы которого соединены с выходами датчиков соответственно типа прицела и времени инерции зрительного аппарата оператора, и реле времени, второй и третий входы которого соединены со вторыми выходами соответственно первого и второго пультов управления оператора, а выход - с третьим входом привода.
Изобретение поясняется чертежом, на котором показано взаимное расположение и связи элементов предлагаемой прицельно-поисковой системы оператора вооружения. Новые элементы и связи показаны пунктиром. Сплошными линиями показаны элементы и связи, реализующие прототип. На чертеже приняты следующие обозначения:
1 - оператор (О),
2 - блок формирования прицельной марки (БФПМ),
3 - апертурная диафрагма (АД),
4 - оптическая формирующая система (ОФС),
5 - объект визирования (ОВ),
6 - датчик типа объекта визирования (ДТОВ),
7 - блок изменения масштаба (БИМ),
8 - привод (ПРД),
9 - датчик типа прицела (ДТП),
10 - первый делитель (ДЕЛ1),
11 - первый сумматор (+1),
12 - датчик квалификации оператора (ДКО),
13 - первый пульт управления оператора (ПУО1),
14 - дальномер (Д),
15 - второй делитель (ДЕЛ2),
16 - второй сумматор (+2),
17 - реле времени (РВ),
18 - датчик типа боеприпаса (ДТБ),
19 - датчик времени инерции зрительного аппарата оператора (ДВИ),
20 - второй пульт управления оператора (ПУО2).
Блоки 2, 4, 13 и 14 являются штатными элементами прототипа и используются в предлагаемом техническом решении без каких-либо конструктивных изменений. Конструктивное исполнение блоков 7, 8, 10, 11, 15, 16 широко известно в научно-технической литературе (см., например, В.В.Корнеев и др. «Электроавтоматика и электрооборудование танков», ч.1, М., ВАБТВ, 1964, с.19-104, 191-220; «Энциклопедия кибернетики», т.1, Киев, 1975, с.254-256). То же касается и блоков 3 и 17 (см., например, Е.И.Бутиков «Оптика», М., «Высшая школа», 1986, с.347-352; А.Х.Синельников «Электронные реле времени», М., «Энергия», 1974, с.101-129, 148-162, 172-181; Р.Фелпс «750 практических схем». Справочное руководство, пер. с англ., М., "Мир", 1986, с.347, 440-454, 462 и др.). Датчики 6, 9, 12, 18 и 19 выполнены на основе делителей напряжения (см., например, В.В.Корнеев и др. «Основы автоматики и танковые автоматические системы», М., ВАБТВ, 1976, с.134-136) с переключателем и указателем (шкалой) соответствующей информации.
Работает предложенное устройство для визирования следующим образом. Оператор, наблюдая через оптическую систему 4, обнаруживает объект визирования 5, определяет и устанавливает необходимый исходный размер поля зрения (как правило, угол поля зрения) и как можно точнее совмещает линию визирования с объектом визирования. Определение и выбор исходных размеров поля зрения зависят от типа визирного (прицельного) устройства. Если это оптический прибор, то основным размером, как правило, будет угол поля зрения, измеряемый плавно или дискретно, в зависимости от необходимого увеличения, размеров объекта визирования, скорости его движения, наличия помех в поле зрения и т.д. В процессе поиска объекта визирования (цели на поле боя, летательного аппарата на фоне звездного неба, подвижного объекта при телевизионной или киносъемке и т.д.) до момента его опознания размеры поля зрения, как правило, максимальны, что необходимо для ускорения процесса поиска. Если же поиск объекта визирования производится по экрану (например, телевизионного устройства), то основными размерами поля зрения будут его ширина и высота, которые, как правило, соответствуют ширине и высоте объекта визирования. Совмещение линии визирования с объектом визирования производится с помощью визирного индекса (прицельной марки), который в прототипе съюстирован с оптической осью поля зрения прицельного устройства. Поэтому при совмещении линии визирования с объектом визирования одновременно происходит совмещение с ним и оптической оси поля зрения визирного устройства ППС, благодаря чему достигается использование области поля зрения с максимальной разрешающей способностью и видимостью, а также уменьшается вероятность оптических искажений.
Убедившись в совмещении визирного индекса с точкой визирования на объекте визирования, оператор уменьшает поле зрения до величины:
В=Во+6 бв,
где В - размер поля зрения (уменьшенный), Во - размер объекта визирования, бв - среднеквадратическое значение ошибки визирования. В предлагаемом устройстве команда на уменьшение может подаваться в ручном и автоматическом режимах. Переключение режимов происходит с помощью второго пульта управления оператора 20, на котором установлены переключатель режимов и две кнопки ручного управления. При положении переключателя режимов в походном положении обеспечивается работа предложенного устройства в режиме работы прототипа. При переключении (оператором) вручную переключателя на втором пульте управления в 1-е положение - обеспечивается управление диафрагмой в ручном режиме: при нажатии на первую кнопку ручного управления - поле зрения уменьшается, пока нажата кнопка, а при нажатии на вторую - увеличивается, возвращаясь в исходное положение. При отпущенных кнопках привод 8 остается неподвижным. Таким образом, обеспечивается возможность установки оператором вручную любого положения диафрагмы: от исходного состояния (полностью открыто) до конечного (полностью закрыто). В этом режиме работа реле времени 17 блокируется, благодаря его связи с блоком 20. В автоматическом режиме (переключатель на блоке 20 во 2-м положении, в котором блокировка реле времени 17 снимается), команда на уменьшение поля зрения (перемещение приводом 8 диафрагмы 3) совмещается с командой на измерение дальности, которая подается с первого пульта управления оператора 13 на привод 8 (через второй пульт управления оператора) после нажатия оператором 1 кнопки измерения дальности на первом пульте управления оператора 13. Информация о размере объекта визирования 5 обеспечивается датчиком типа объекта 6, представляющим собой переключатель на несколько положений, каждое из которых соответствует определенному типу объекта визирования, размеры которого существенно отличаются от других. Сигнал, соответствующий размерам объекта визирования в виде, например, напряжения, подается с выхода блока 6 на первый вход блока изменения масштаба 7, на второй вход которого поступает сигнал с выхода датчика типа прицела 9, соответствующий увеличению прицела, которое в свою очередь зависит от типа прицела (если увеличение не изменяется) и от установленного значения увеличения (если оно изменяется). Под действием этого сигнала в блоке 7 устанавливается соответствующий масштаб, обеспечивающий изменение сигнала с выхода блока 6 (датчика типа объекта). С выхода блока 7 сигнал поступает на первый вход первого делителя 10, на второй вход которого поступает сигнал с выхода датчика дальности объекта. На первом делителе 10 обеспечивается деление сигнала, соответствующего размерам цели на сигнал, соответствующий дальности до нее. Благодаря этому информация о линейном размере объекта преобразуется в информацию об угловом размере и с выхода делителя 10 подается на первый вход первого сумматора 11, где суммируется (алгебраически) с сигналом датчика квалификации оператора, соответствующего среднеквадратическим угловым ошибкам визирования оператора данной квалификации. С выхода первого сумматора 11 сигнал подается на вход привода 8 и обеспечивает остановку привода при достижении диафрагмой 3 заданного размера, соответствующего величине В=Во+6 бв. Это может быть сделано с помощью концевого выключателя, положение которого относительно подвижных элементов привода может изменяться в соответствии с величиной сигнала на выходе блока 11. В этом положении диафрагма и привод остаются в течение определенного времени tз-tи, по истечении которого привод 8 и диафрагма 3 возвращаются в исходное положение, а поле зрения восстанавливается в исходных размерах. Команда на возвращение привода и диафрагмы в исходное положение поступает на привод с выхода реле времени 17, которое обеспечивает выполнение алгоритма: tз-tи. В общем случае отсчет заданного времени tз начинается от момента нажатия оператором 1 кнопки измерения дальности, расположенной на первом пульте управления оператора 13. Поскольку положение диафрагмы 3 и ее привода 8 за время от нажатия на кнопку измерения дальности до нажатия на кнопку стрельбы не меняется, то для упрощения аппаратурной реализации в предложенном устройстве отсчет заданного времени ведется от момента нажатия на кнопку стрельбы, то есть выполняется алгоритм t'з-tи, что не меняет существа дела (t'з - время от момента нажатия на кнопку стрельбы до окончания времени визирования). В этом случае время t'з для предлагаемого устройства определяется временем полета боеприпаса до объекта визирования и временем инерции системы «глаз-визирное устройство», которое определяется временем инерции зрительного аппарата оператора и соответствующей характеристики используемого прицела (особенно в электронно-оптических прицелах). Информация о времени полета боеприпаса на дальность объекта визирования снимается с выхода блока 15, которая вырабатывается делением значения дальности до объекта на скорость боеприпаса в процессе его полета к объекту визирования. Информация о дальности до объекта визирования поступает на второй делитель 15 (на его первый вход), а информация о скорости боеприпаса - с выхода датчика типа боеприпаса 18 на его второй вход. Информация о времени инерции визирного устройства и оператора снимается с выходов блоков соответственно 9 и 19. Все три сигнала о временных характеристиках суммируются на сумматоре 16 и результирующий сигнал подается на первый вход реле времени 17 и обеспечивает задержку в его срабатывании после подачи на его второй вход сигнала о производстве выстрела, снимаемого с пульта управления оператора 13 после нажатия на кнопки стрельбы. По истечении времени t'з-tи на выходе реле времени формируется сигнал возврата привода 8, а вместе с ним и диафрагмы 3 в исходное положение. При достижении диафрагмой 3 исходного положения привод 8 отключается.
Введение новых элементов и связей позволило в существенной степени устранить ранее отмеченные недостатки и достичь положительного эффекта: обеспечить увеличение контраста визирного индекса с фоном и местностью, реализовать возможность экранирования значительной части поля зрения, например уменьшить его в 5-20 раз, что практически исключает действие световых и пыледымовых помех. Все это позволило в значительной степени улучшить прицельно-поисковые возможности операторов вооружения, а вместе с этим повысить и его точность, особенно при стрельбе управляемой ракетой (на 7-15%).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗИРНО-ПОИСКОВАЯ СИСТЕМА | 2010 |
|
RU2440545C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2009 |
|
RU2395058C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2010 |
|
RU2434198C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436030C1 |
| СПОСОБ ВИЗИРОВАНИЯ | 2010 |
|
RU2436029C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2439463C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2396505C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2010 |
|
RU2439462C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2426055C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436031C1 |
Изобретение относится к области вооружения и военной техники, в частности к прицельно-поисковым системам операторов вооружения. Система содержит первый пульт управления оператора, дальномер и оптически сопряженные блок формирования прицельной марки и оптическую формирующую систему, соединенную с пультом управления оператора и дальномером. Дополнительно в систему введены датчик квалификации оператора, второй пульт управления оператора, вход которого соединен с первым выходом первого пульта управления оператора, датчик типа прицела, датчик времени инерции зрительного аппарата оператора, последовательно соединенные датчик типа объекта визирования, блок изменения масштаба, второй вход которого соединен с первым выходом датчика типа прицела, первый делитель, второй вход которого соединен с выходом дальномера, первый сумматор, второй вход которого соединен с выходом датчика квалификации оператора, привод, второй вход которого соединен с первым выходом второго пульта управления оператора, и оптически сопряженную с оптической формирующей системой апертурную диафрагму с регулируемой апертурой, последовательно соединенные датчик типа боеприпаса, второй делитель, второй вход которого соединен с выходом дальномера, второй сумматор, второй и третий входы которого соединены с выходами датчиков соответственно типа прицела и времени инерции зрительного аппарата оператора, и реле времени, второй и третий входы которого соединены со вторыми выходами соответственно первого и второго пультов управления оператора, а выход - с третьим входом привода. Технический результат заключается в повышении эффективности стрельбы, повышении помехоустойчивости и точности системы. 1 ил.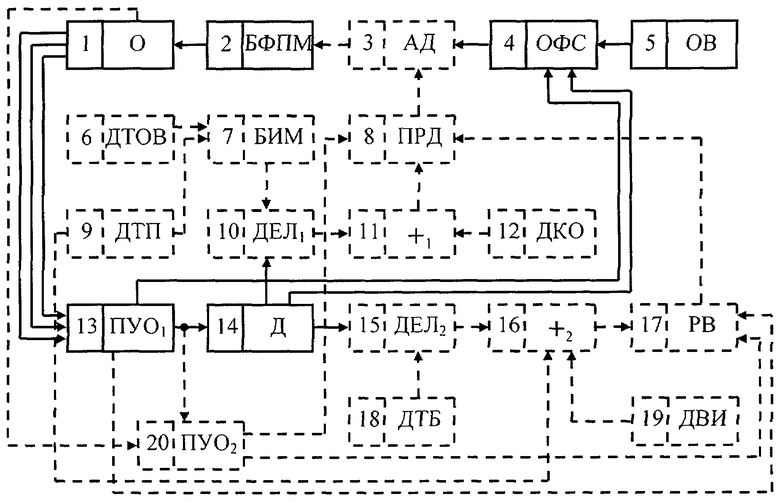
Прицельно-поисковая система оператора вооружения, содержащая первый пульт управления оператора, дальномер, вход которого соединен с первым выходом пульта управления оператора, и оптически сопряженные блок формирования прицельной марки и оптическую формирующую систему, первый вход которой соединен со вторым выходом первого пульта управления оператора, а второй - с выходом дальномера, отличающаяся тем, что в нее введены датчик квалификации оператора, второй пульт управления оператора, вход которого соединен с первым выходом первого пульта управления оператора, датчик типа прицела, датчик времени инерции зрительного аппарата оператора, последовательно соединенные датчик типа объекта визирования, блок изменения масштаба, второй вход которого соединен с первым выходом датчика типа прицела, первый делитель, второй вход которого соединен с выходом дальномера, первый сумматор, второй вход которого соединен с выходом датчика квалификации оператора, привод, второй вход которого соединен с первым выходом второго пульта управления оператора, и оптически сопряженную с оптической формирующей системой апертурную диафрагму с регулируемой апертурой, последовательно соединенные датчик типа боеприпаса, второй делитель, второй вход которого соединен с выходом дальномера, второй сумматор, второй и третий входы которого соединены с выходами датчиков соответственно типа прицела и времени инерции зрительного аппарата оператора, и реле времени, второй и третий входы которого соединены со вторыми выходами соответственно первого и второго пультов управления оператора, а выход - с третьим входом привода.
| Латухин А.Н | |||
| Противотанковое вооружение | |||
| - М.: Воениздат, МО СССР, 1974, с.218-235 | |||
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |

