Предлагаемое изобретение относится к способам оценки качественных и количественных показателей эффективности борьбы с вредителями в сельском хозяйстве и направлено на повышение точности оценки и сокращение времени контроля количества объектов на плоской поверхности, например количества малоподвижных насекомых на плоской поверхности и вид заболевания и степень поражения с помощью электронного каталога до и после химической обработки растений. Может быть использовано в строительной индустрии, в медицине, в пищевой и в других отраслях промышленности.
Известен микроскопический метод анализа качества опрыскивания (Су-дит Ж.М., Штеренталь М.И., Нагорный Ю.П. Применение методов математической статистики при исследовании распыливающих органов опрыскивателей. - В кн. Механизация технологических процессов защиты растений МСХ СССР-ВАСХНИЛ, Ленинград, 1970, стр.299). Он заключается в подсчете капель после опрыскивания на поверхности специальных подложек (предметные стекла, коллекторы из мелованной бумаги и др.) с минимальным растеканием на них капель.
Замер капель на подложках (коллекторах) проводится с помощью окулярной линейки микроскопа. Диаметры капель и их количество согласно существующей методике определяется на 1 см2 обрабатываемой площади. Далее заполняются таблицы с разбивкой размеров капель на классы и их численность, которые обрабатываются с использованием методов математической статистики.
Однако этот метод очень трудоемкий и недостаточно точный, т.е. зависит от качества и точности визуальной оценки. Недостатком этого способа является недостаточная точность и ограниченные технологические возможности.
Наиболее близким к предлагаемому изобретению является способ определения степени покрытия поверхности рабочей жидкостью (патент РФ №2290693, МКИ G06К 9/52, опубликован 27.12.2006, Бюл. №36), включающий получение одной матрицы с данными, характеризующими размеры объектов путем сканирования с разрешающей способностью на ниже 300 dpi на дюйм черно-белого изображения с расширением файла BMP и последующей его компьютерной обработкой.
Недостатком этого способа является недостаточная точность и ограниченные технологические возможности.
Техническим решением задачи является повышение точности и расширение технологических возможностей.
Поставленная задача достигается тем, что в способ определения количества объектов на плоской поверхности, включающий получение одной матрицы с данными, характеризующими размеры объектов, путем сканирования черно-белого изображения и последующей его компьютерной обработкой, сначала плоская поверхность вместе с объектами в цветном изображении с расширением файла jpg и разрешающей способностью не ниже 600 dpi на дюйм подвергается компьютерной обработке, затем после получения трех матриц компонентов этой поверхности по цветам выбирается матрица компонента одного цвета и один объект в виде матрицы выделяется в этом же цвете, а после в этом одном объекте рассчитывается средняя яркость выбранного цвета и площадь объекта в пикселях, затем определяется общая площадь всех объектов на плоской поверхности путем суммирования всех значений матрицы компонентов одного цвета в пикселях в интервале от 0 до средней яркости объекта, после деления которой на площадь одного объекта получают общее их количество.
По данным патентно-технической литературы не обнаружено техническое решение, аналогичное заявляемому, что позволяет судить об изобретательском уровне предлагаемого способа определения количества объектов на плоской поверхности.
Новизна усматривается в том, что сначала плоская поверхность вместе с объектами в цветном изображении с расширением файла jpg и разрешающей способностью не ниже 600 dpi на дюйм подвергается компьютерной обработке, затем после получения трех матриц компонентов этой поверхности по цветам выбирается матрица компонента одного цвета и один объект в виде матрицы выделяется в этом же цвете, что повышает точность и расширяет технологические возможности.
Новизна обусловлена тем, что после выделения одного объекта в одном из трех цвете рассчитывается средняя яркость выбранного цвета и площадь объекта в пикселях, затем определяется общая площадь всех объектов на плоской поверхности путем суммирования всех значений матрицы в пикселях в интервале от 0 до средней яркости объекта, после деления которой на площадь одного объекта получают общее их количество, что повышает точность и расширяет технологические возможности.
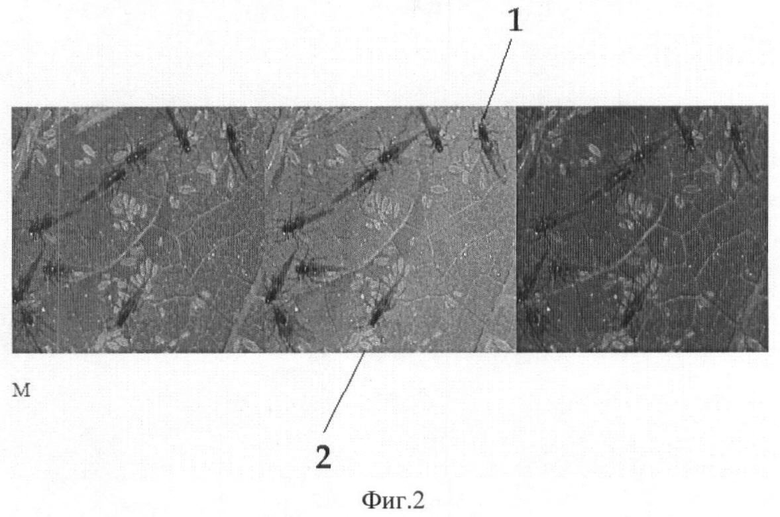
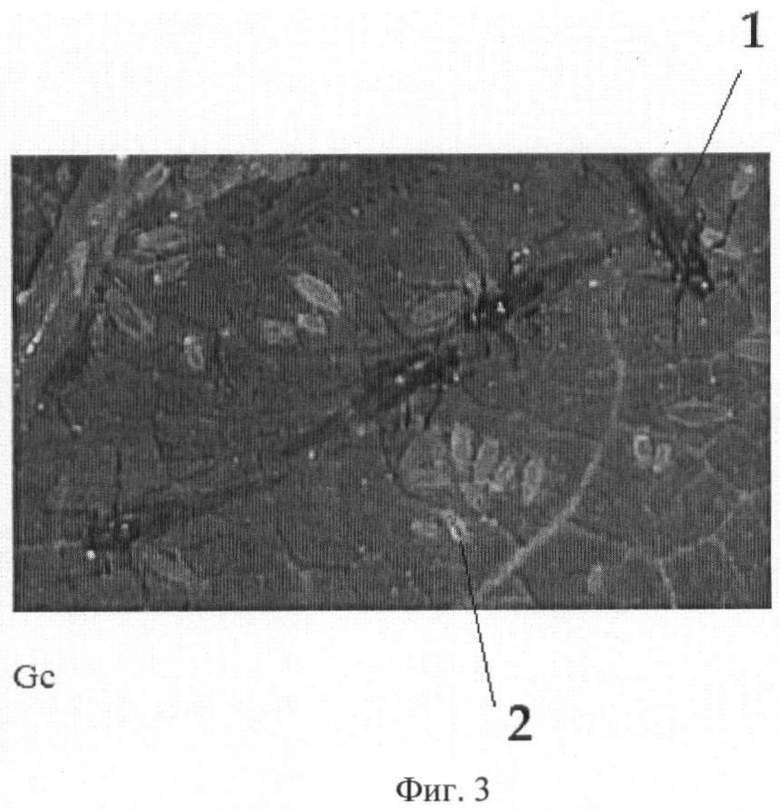
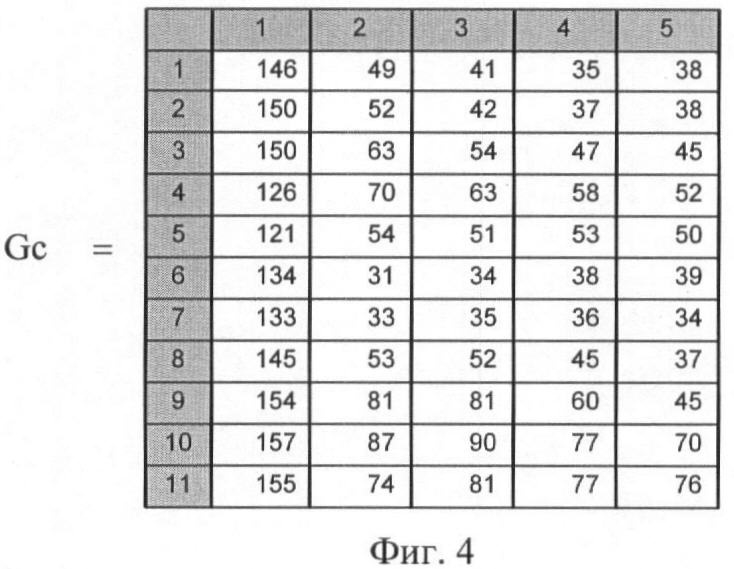
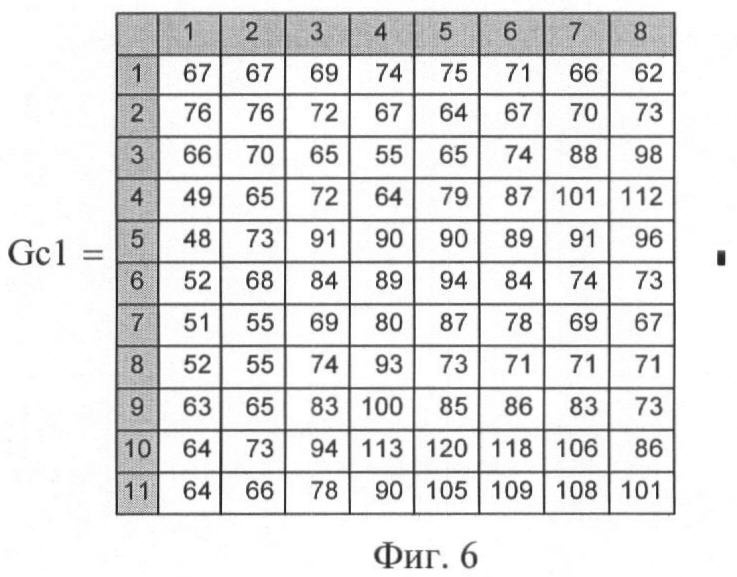
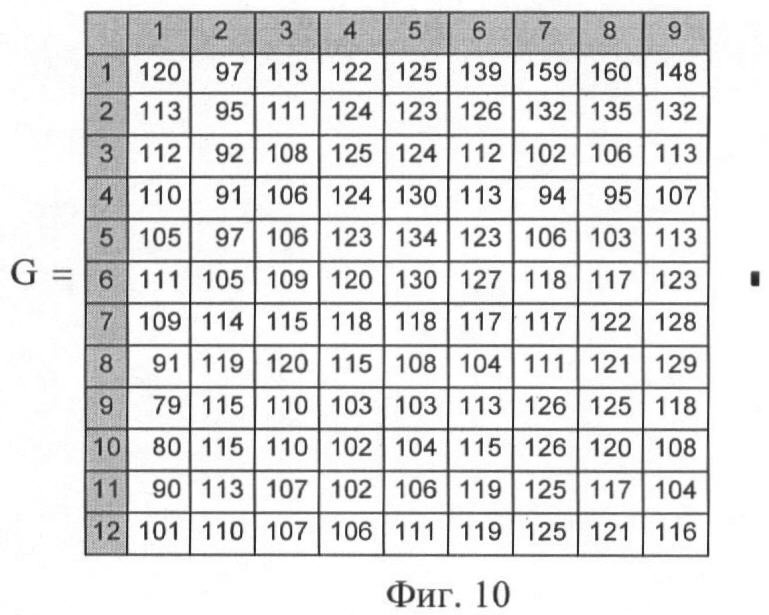
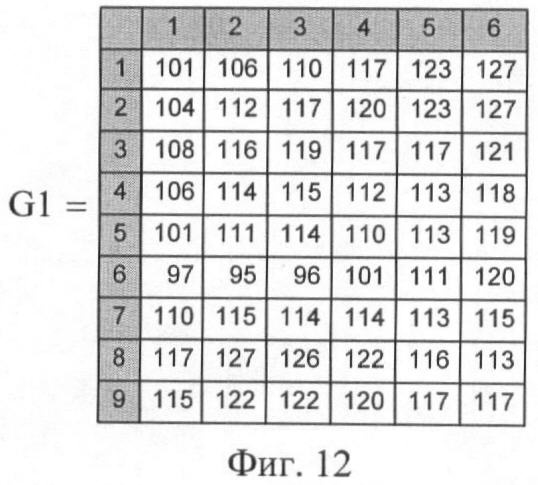
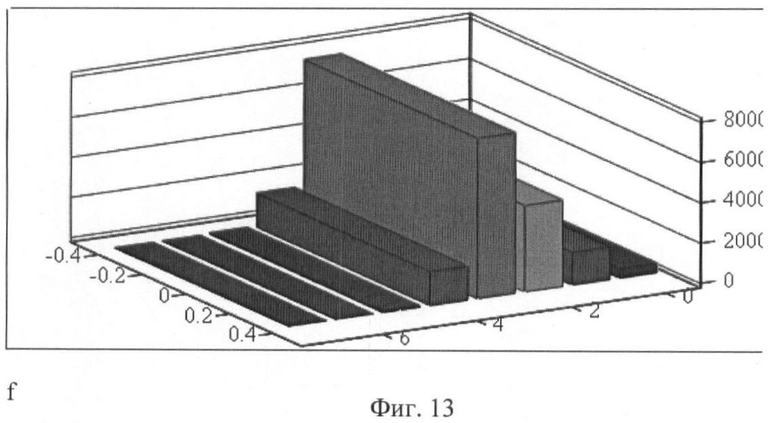
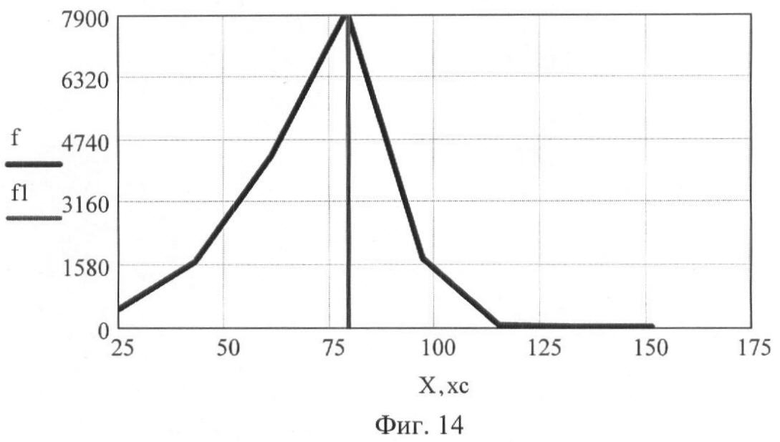
Сущность изобретения поясняется чертежами, где на фиг.1 изображена плоская (листовая) поверхность с объектами в виде тли и ее личинок; на фиг.2 - матрицы яркости компонентов по цветам в виде изображения красного, зеленого и синего цветов; на фиг.3 - фрагмент изображения в виде матрицы яркости синего цвета; на фиг.4 - информация компонента синего цвета в виде цифровой матрицы; на фиг.5 - изображение выделенного объекта (личинка); на фиг.6 - информация компонента синего цвета в виде цифровой матрицы объекта; на фиг.7 - фрагмент плоской (листовой) поверхности, пораженной болезнью; фиг.8 - матрицы компонентов по цветам в виде изображения красного, зеленого и синего цветов; на фиг.9 - изображение матрицы компонента синего цвета; на фиг.10 - информация компонента синего цвета в виде цифровой матрицы; на фиг.11 - изображение выделенного объекта (болезни); на фиг.12 - информация компонента синего цвета в виде цифровой матрицы объекта (болезни); на фиг.13 - гистограмма эмпирического распределения компонента плотности синего цвета объекта (болезни); на фиг.14 - полигон эмпирического распределения компонента яркости синего цвета (болезни).
Способ определения количества объектов на плоской поверхности, например определения количества личинок на плоской поверхности листа в сельском хозяйстве, осуществляют следующим образом. На фиг.1 показан фрагмент цветного изображения плоской (листовой) поверхности с двумя объектами в виде тли 1 и ее личинок 2, помещенный в компьютере. Используя программу MathCad, проведем обработку цветного изображения всей этой плоской поверхности с объектами (фиг.1) RGB-методом. При этом методе изображение представляется суммой трех составляющих с красным (Red 0…255), зеленым (Green 0…255) и синим (Blue 0…255) цветами. Функция READRGB обеспечивает считывание цветных изображений из файлов формата JPG и возвращает встроенную матрицу М, содержащую три монохромных изображения в виде трех матриц (фиг.2), представляющих яркости трех указанных цветов (В.Дьяконов MathCad 2001: учебный курс. - СПб: Питер, 2001. - С.387). С помощью функции submatrix несложно выделить из матриц М три матрицы, несущие информацию отдельно по каждому из трех цветов. Для дальнейшей работы требуется матрица одного цвета. Выделим матрицу с синим цветом (фиг.3) - фрагмент изображения в виде матрицы яркости синего цвета. На фиг.4 представлен фрагмент матрицы, представляющей яркость синего цвета выделенной матрицы (цифровая матрица). С помощью функции submatrix выделим объект (личинку) фиг.5, и на фиг.6 представлен фрагмент матрицы, представляющей яркость синего цвета объекта (личинки). В матрице, представляющей яркость синего цвета объекта (личинки), определяем размах яркости, выраженный в пикселях, и площадь объекта (личинки). Определив суммарное число пикселей попаданий размаха яркости объекта (личинки) в матрице, представляющей яркость синего цвета выделенной матрицы, и разделив на площадь объекта (личинки), получим общее их количество.
Способ определения количества объектов на плоской поверхности позволяет определить вид заболевания и степень поражения им растения. На фиг.7 показан фрагмент цветного изображения листа растения, пораженный неизвестной болезнью и помещенный в компьютере. Используя программу MathCad, проведем обработку цветного изображения RGB-методом, при нем изображение представляется суммой трех составляющих с красным (Red 0…255), зеленым (Green 0…255) и синим (Blue 0…255) цветами. Функция READRGB обеспечивает считывание цветных изображений из файлов формата JPG и возвращает встроенную матрицу М, содержащую три монохромных изображения (фиг.8), представляющих яркости трех указанных цветов (В.Дьяконов MathCad 2001: учебный курс. - СПб: Питер, 2001. - С.387). С помощью функции submatrix несложно выделить из матрицы М три матрицы, несущие информацию отдельно по каждому из трех цветов. Со всеми матрицами проводят работу поочередно. Выделим матрицу синего цвета - фиг.9. На фиг.10 представлен фрагмент матрицы, представляющей яркость синего цвета. С помощью функции submatrix выделим объект (болезнь) фиг.11, и на фиг.12 представлен фрагмент матрицы представляющей яркость синего цвета объекта (болезни). В данной матрице определим максимальное, среднее и минимальное значения, выраженные в пикселях яркости синего цвета объекта (болезни). Разбив на 8 групп интервал варьирования, определили частоту попадания признака в заданный интервал, по полученным данным построили гистограмму фиг.13 и полигон эмпирического распределения яркости синего цвета объекта (болезни) фиг.14. Определили стандартное отклонение, ошибку выборочной средней, коэффициент вариации и относительную ошибку выборочной средней по яркости синего цвета. Определили общее количество пикселей яркости синей цветовой гаммы в интервале ±σ от среднего значения синего цвета объекта (болезни) на плоской поверхности листа синего цвета. После обработки всех трех цветов определим среднее значение количества пикселей в цветовой гамме, разделив общее значение количества пикселей в цветовой гамме на среднее и умножив на 100, получим процент поражения болезнью данной плоской поверхности листа. Зная средние значения яркости по цветам объекта (болезни), сравнивая с электронным каталогам болезней по всем трем значениям яркости, определим заболевание.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения качества заделки пожнивных остатков в почву в реальном времени | 2018 |
|
RU2693644C1 |
| Способ определения качества очистки семян масличных культур для селекции | 2018 |
|
RU2693334C1 |
| Почвообрабатывающая дисковая батарея для заделки пожнивных остатков длинностебельных культур | 2023 |
|
RU2825223C1 |
| Способ получения белкового корма для сельскохозяйственных животных в реальном времени | 2018 |
|
RU2688481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ПОКРЫТИЯ ПОВЕРХНОСТИ РАБОЧЕЙ ЖИДКОСТЬЮ | 2004 |
|
RU2290693C2 |
| Способ определения качества внесения твердых гранулированных минеральных удобрений | 2019 |
|
RU2725787C1 |
| Линия для получения белкового корма для сельскохозяйственных животных в реальном времени | 2018 |
|
RU2690882C1 |
| СПОСОБ ДИАГНОСТИКИ АТРОФИИ ЗРИТЕЛЬНОГО НЕРВА | 2005 |
|
RU2282390C1 |
| Устройство для внесения минеральных удобрений | 2019 |
|
RU2726558C1 |
| РЕШЕТЧАТОЕ ИЗОБРАЖЕНИЕ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2006 |
|
RU2422863C2 |

Изобретение относится к области распознавания данных. Технический результат заключается в повышении точности распознавания и расширении технологических возможностей. Такой результат достигается за счет того, что сначала плоскую поверхность вместе с объектами в цветном изображении с расширением файла jpg и разрешающей способностью не ниже 600 dpi на дюйм подвергают компьютерной обработке, затем после получения трех матриц компонентов этой поверхности по цветам выбирают матрицу компонента одного цвета и один объект в виде матрицы выделяют в этом же цвете, после в этом объекте рассчитывают среднюю яркость выбранного цвета и площадь объекта в пикселях, затем определяют общую площадь всех объектов на плоской поверхности путем суммирования всех значений матрицы компонентов одного цвета в пикселях в интервале от 0 до средней яркости объекта, после деления которой на площадь одного объекта получают общее их количество. 14 ил.
Способ определения количества объектов на плоской поверхности, включающий получение одной матрицы с данными, характеризующими размеры объекта, путем сканирования изображения и последующей его обработки, отличающийся тем, что сначала плоскую поверхность вместе с объектами в цветном изображении с расширением файла jpg и разрешающей способностью не ниже 600 dpi на дюйм подвергают компьютерной обработке, затем после получения трех матриц компонентов этой поверхности по цветам выбирают матрицу компонента одного цвета и один объект в виде матрицы выделяют в этом же цвете, после чего в этом объекте рассчитывают среднюю яркость выбранного цвета и площадь объекта в пикселях, затем определяют общую площадь всех объектов на плоской поверхности путем суммирования всех значений матрицы компонентов одного цвета в пикселях в интервале от 0 до средней яркости объекта, после деления которой на площадь одного объекта получают общее их количество.
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ПОКРЫТИЯ ПОВЕРХНОСТИ РАБОЧЕЙ ЖИДКОСТЬЮ | 2004 |
|
RU2290693C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2267232C1 |
| СПОСОБ ФОТОМЕТРИЧЕСКОГО ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА АНАЛИЗИРУЕМОГО ВЕЩЕСТВА С ИСПОЛЬЗОВАНИЕМ ВИДЕОИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА | 1995 |
|
RU2130171C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6453060 B1, 17.09.2002. | |||

