Перекрестная ссылка на родственную заявку
Данная заявка испрашивает приоритет предварительной патентной заявки США № 60/863793, поданной 31 октября 2006 года и озаглавленной "A METHOD AND APPARATUS FOR SCHEDULING UL TRANSMISSION". Эта заявка полностью включена в данный документ посредством ссылки.
Область техники, к которой относится изобретение
Последующее описание, в общем, относится к беспроводной связи, а более конкретно к структуре контрольных сигналов и централизованному планированию для динамического режима работы SIMO, SU-MIMO и MU-MIMO при передачах по обратной линии связи.
Уровень техники
Системы беспроводной связи широко развернуты с тем, чтобы предоставлять различные типы содержимого связи, например речь, данные и т.п. Эти системы могут быть системами множественного доступа, допускающими поддержку связи с несколькими пользователями посредством совместного использования доступных системных ресурсов (к примеру, полосы пропускания и мощности передачи). Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA); системы множественного доступа с временным разделением каналов (TDMA); системы множественного доступа с частотным разделением каналов (FDMA) и системы множественного доступа с ортогональным частотным разделением каналов (OFDMA); системы сверхширокополосных передач для мобильных устройств (UMB) согласно партнерскому проекту третьего поколения 2; и системы долгосрочного развития (LTE) согласно партнерскому проекту третьего поколения. В общем, каждый терминал обменивается данными с одной или более базовых станций через передачи по прямым и обратным линиям связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи от базовой станции(й) к терминалу(ам), а обратная линия связи (или восходящая линия связи) относится к связи от терминала(ов) к базовой станции(ям). Эти линии связи могут быть установлены через одну и/или несколько приемных/передающих антенн в базовых станциях или терминалах.
Дополнительно, в беспроводной связи большая часть полосы пропускания спектра, а также мощность передачи базовой станции, регулируется. Проектирование с учетом таких ограничений привело к системам со многими входами и многими выходами (MIMO) в качестве пути к реализации увеличенной пиковой скорости передачи данных, спектральной эффективности и качества обслуживания. MIMO-система состоит из передающих(его) устройств(а) и приемных(ого) устройств(а) соответственно с несколькими (NT) передающими антеннами и несколькими (NR) приемными антеннами для передачи данных. Вариантом MIMO-системы, которая по-прежнему представляет улучшения по сравнению с системами с одним входом и одним выходом (SISO), является система с одним входом и многими выходами (SIMO). MIMO-канал, формируемый посредством NT передающих и NR приемных антенн, может быть разложен на NV независимых каналов, которые также упоминаются как пространственные собственные каналы, где 1≤NV<min{NT,NR}.
MIMO-системы могут предоставлять повышенную эффективность (к примеру, более высокую производительность, большую пропускную способность или повышенную надежность или любую комбинацию вышеозначенного), если используются дополнительные размерности, созданные посредством нескольких передающих и приемных антенн. Следует принимать во внимание, что, хотя SIMO-системы предоставляют несколько меньший прирост эффективности, такие системы исключают сложность в приемном устройстве за счет использования только одной антенны в абонентском устройстве и употребления нескольких антенн в базовых станциях. MIMO-системы могут быть разделены на два функциональных класса: (i) однопользовательская MIMO и (ii) многопользовательская MIMO. Основная цель работы однопользовательской MIMO (SU-MIMO) может заключаться в том, чтобы увеличивать пиковую скорость передачи данных на терминал, тогда как основная цель многопользовательской MIMO (MU-MIMO) может заключаться в том, чтобы увеличивать пропускную способность сектора (или обслуживающей соты). Работа в каждом из этих классов имеет преимущества. SU-MIMO использует пространственное мультиплексирование для того, чтобы предоставлять увеличенную производительность и надежность, MU-MIMO использует многопользовательское мультиплексирование (или многопользовательское разнесение), чтобы получать дополнительные преимущества по пропускной способности. Дополнительно, MU-MIMO извлекает выгоду из пространственного мультиплексирования, даже когда абонентское устройство имеет одну приемную антенну.Чтобы извлекать выгоду из повышенной эффективности, получаемой согласно парадигме MIMO беспроводной связи, при этом обслуживая одновременно пользователей SIMO, SU-MIMO и MU-MIMO без ущерба для любого из этих режимов работы, существует потребность в системах и способах, которые предоставляют объединенное и централизованное, а также динамическое планирование передач SIMO, SU-MIMO и MU-MIMO.
Раскрытие изобретения
Далее представлена упрощенная сущность для того, чтобы предоставить базовое понимание некоторых аспектов раскрытых вариантов осуществления. Эта сущность не является всесторонним обзором и не предназначена идентифицировать ключевые или критические элементы либо устанавливать границы таких вариантов осуществления. Ее цель состоит в том, чтобы представить некоторые понятия описанных вариантов осуществления в упрощенной форме в качестве вступления в более подробное описание, которое представлено далее.
В аспекте способ, используемый в системе беспроводной связи, раскрывается в данном документе, при этом способ содержит: передачу, по меньшей мере, одного опорного сигнала управления мощностью из антенны, выбранной из группы из M антенн, где M является положительным целым числом; перенос смещения спектральной плотности мощности (PSD) из антенны, используемой для того, чтобы сообщать, по меньшей мере, один опорный сигнал управления мощностью, при этом PSD-смещение основано, по меньшей мере, частично на опорном уровне PSD для передачи, по меньшей мере, одного опорного сигнала управления мощностью; и передачу контрольного сигнала из каждой антенны в наборе из M антенн для оценки канала системы со многими входами и многими выходами, когда M>1, и SIMO-канала, когда M=1.
В другом аспекте раскрывается устройство беспроводной связи, содержащее: процессор, выполненный с возможностью передавать опорный сигнал управления мощностью из антенны, выбранной из набора виртуальных антенн или физических антенн; переносить значение спектральной плотности мощности (PSD) из выбранной антенны, при этом PSD-значение определяется, по меньшей мере, частично посредством опорной PSD, используемой для того, чтобы сообщать опорный сигнал управления мощностью; периодически передавать зондирующий опорный сигнал из каждой из антенн в наборе виртуальных антенн или физических антенн; и запоминающее устройство, соединенное с процессором.
В еще одном аспекте настоящее описание раскрывает устройство, которое работает в окружении беспроводной связи, при этом устройство содержит: средство передачи, по меньшей мере, одного опорного сигнала управления мощностью из антенны, выбранной из группы, включающей в себя M виртуальных антенн или G физических антенн, при этом M и G являются положительными целыми числами; средство переноса смещения спектральной плотности мощности (PSD) из антенны, используемой для того, чтобы сообщать, по меньшей мере, один опорный сигнал управления мощностью; и средство передачи контрольного сигнала из каждой из антенн в группе из M виртуальных антенн или группе из G физических антенн.
В еще одном дополнительном аспекте раскрывается компьютерный программный продукт, содержащий машиночитаемый носитель, включающий в себя: код для инструктирования, по меньшей мере, одному компьютеру передавать, по меньшей мере, один опорный сигнал управления мощностью из антенны, выбранной из группы из M антенн, при этом M является положительным целым числом; код для инструктирования, по меньшей мере, одному компьютеру переносить смещение спектральной плотности мощности (PSD) из антенны, используемой для того, чтобы сообщать, по меньшей мере, один опорный сигнал управления мощностью, при этом PSD-смещение основано, по меньшей мере, на опорном уровне PSD для передачи, по меньшей мере, одного опорного сигнала управления мощностью; и код для инструктирования, по меньшей мере, одному компьютеру передавать контрольный сигнал из каждой антенны в наборе из M антенн.
Настоящее новшество, в аспекте, раскрывает другой способ, используемый в системе беспроводной связи, при этом способ содержит: оценку канала системы с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO), по меньшей мере, частично на основе приема набора контрольных сигналов, передаваемых посредством M антенн; определение спектральной плотности мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; определение скорости передачи данных для переноса данных в RL согласно набору запланированных потоков данных; и планирование терминала доступа в одном из режима с одним входом и многими выходами (SIMO), режима однопользовательской MIMO или режима многопользовательской MIMO.
В другом аспекте раскрывается устройство, которое работает в системе беспроводной связи, при этом устройство содержит: средство оценки беспроводного канала; средство определения спектральной плотности мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; средство определения скорости передачи данных для переноса данных в RL согласно набору запланированных потоков данных; и средство планирования терминала в одном из режима с одним входом и многими выходами (SIMO), режима однопользовательской MIMO или режима многопользовательской MIMO.
В еще одном аспекте настоящее новшество раскрывает устройство беспроводной связи, содержащее: процессор, выполненный с возможностью оценивать канал системы с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO); определять спектральную плотность мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; определять скорость передачи данных для переноса данных в RL согласно набору запланированных потоков данных; и планировать терминал доступа в одном из режима с одним входом и многими выходами (SIMO), режима однопользовательской MIMO или режима многопользовательской MIMO; и запоминающее устройство, соединенное с процессором.
В еще дополнительном аспекте настоящее описание раскрывает компьютерный программный продукт, содержащий машиночитаемый носитель, включающий в себя: код для побуждения, по меньшей мере, одного компьютера оценивать канал системы с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO); код для побуждения, по меньшей мере, одного компьютера определять спектральную плотность мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; код для побуждения, по меньшей мере, одного компьютера определять скорость передачи данных для переноса данных в RL согласно набору запланированных потоков данных; и код для побуждения, по меньшей мере, одного компьютера планировать терминал в одном из режима (SIMO) с одним входом и многими выходами, режима однопользовательской MIMO или режима многопользовательской MIMO.
Для достижения вышеуказанных и связанных целей один или более вариантов осуществления содержат признаки, далее полностью описанные и конкретно указанные в формуле изобретения. Последующее описание и прилагаемые чертежи подробно излагают определенные иллюстративные аспекты и указывают некоторые из множества способов, которыми могут быть использованы принципы вариантов осуществления. Другие преимущества и новые признаки станут очевидны из последующего подробного описания, когда рассматриваются вместе с чертежами, а раскрытые варианты осуществления предназначены включать в себя все такие аспекты и их эквиваленты.
Краткое описание чертежей
Фиг.1 иллюстрирует систему беспроводной связи с множественным доступом, где точка доступа с несколькими антеннами одновременно обменивается данными с различными терминалами доступа, которые работают в режиме SIMO, SU-MIMO и MU-MIMO, согласно аспектам, раскрытым в данном документе.
Фиг.2 является блок-схемой высокого уровня системы 200, которая упрощает динамическое централизованное планирование и совместную работу в UL терминала доступа в режиме SIMO, SU-MIMO или MU-MIMO.
Фиг.3A и 3B являются схематичными представлениями, которые иллюстрируют соответственно относительную величину мощности опорного сигнала, принимаемой посредством терминала, для того чтобы определять CQI и PSD данных, используемые для того, чтобы передавать данные в RL и зондирующие (контрольные) опорные сигналы.
Фиг.4 является схемой, которая иллюстрирует назначение контрольных сигналов частотных ресурсов для нескольких пользователей.
Фиг.5 является схемой структур каналов назначения UL для планирования совместной работы пользователей SIMO, SU-MIMO и MU-MIMO.
Фиг.6 является блок-схемой примерного варианта осуществления системы передающего устройства и системы приемного устройства в режиме MIMO.
Фиг.7 иллюстрирует примерную MU-MIMO-систему.
Фиг.8 представляет блок-схему способа для управления мощностью и передачей контрольных сигналов согласно аспекту, раскрытому в данном документе.
Фиг.9 представляет блок-схему способа для планирования режима работы SIMO, SU-MIMO или MU-MIMO.
Фиг.10 представляет блок-схему способа для приема назначения ресурсов для работы в режиме SIMO, SU-MIMO или MU-MIMO.
Фиг.11 иллюстрирует блок-схему примерной системы, которая предоставляет управление мощностью и контрольным сигналом, а также прием назначения ресурсов связи согласно аспектам, раскрытым в настоящем подробном описании.
Фиг.12 является блок-схемой системы, которая предоставляет планирование режимов работы SIMO, SU-MIMO или MU-MIMO, а также передачу назначения ресурсов связи согласно аспекту, изложенному в данном документе.
Осуществление изобретения
Далее описываются различные варианты осуществления со ссылками на чертежи, на которых одинаковые номера ссылок используются для того, чтобы ссылаться на одинаковые элементы. В последующем описании, для целей пояснения, многие конкретные детали пояснены для того, чтобы обеспечить полное понимание одного или более вариантов осуществления. Тем не менее, может быть очевидным, что эти варианты осуществления могут применяться на практике без этих конкретных деталей. В других случаях, на модели блок-схемы показаны распространенные структуры и устройства, чтобы упростить описание одного или более вариантов осуществления.
При использовании в данной заявке термины "компонент", "модуль", "система" и т.п. имеют намерение ссылаться на связанный с компьютером объект, будь то аппаратные средства, микропрограммное обеспечение, комбинация аппаратных средств и программного обеспечения, программное обеспечение или программное обеспечение в ходе исполнения. Например, компонент может быть, но не только, процессом, запущенным на процессоре, процессором, объектом, исполняемым файлом, потоком исполнения, программой и/или компьютером. В качестве иллюстрации, и приложение, запущенное на вычислительном устройстве, и вычислительное устройство может быть компонентом. Один или более компонентов могут постоянно размещаться внутри процесса и/или потока исполнения, и компонент может быть локализован на компьютере и/или распределен между двумя и более компьютерами. Кроме того, эти компоненты могут приводиться в исполнение с различных машиночитаемых носителей, имеющих сохраненные на них различные структуры данных. Компоненты могут обмениваться данными посредством локальных и/или удаленных процессов, например, в соответствии с сигналом, имеющим один или более пакетов данных (к примеру, данных из одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или по сети, например по Интернету, с другими системами посредством сигнала).
Кроме того, термин "или" имеет намерение означать включающее "или" вместо исключающего "или". Т.е., если не указано иное или не очевидно из контекста, "X использует A или B" имеет намерение означать любую из естественных включающих перестановок. Т.е. если X использует A; X использует B; или X использует и A, и B, то "X использует A или B" удовлетворяется в любом из вышеуказанных случаев. Помимо этого, использование единственного числа в данной заявке и прилагаемой формуле изобретения, в общем, должно истолковываться так, чтобы означать "один или более", если иное не указано или не очевидно из контекста, направленного на форму единственного числа.
Различные варианты осуществления описываются в данном документе в связи с беспроводным терминалом. Беспроводной терминал может упоминаться как устройство, предоставляющее возможности передачи речи и/или данных пользователю. Беспроводной терминал может быть подключен к вычислительному устройству, такому как дорожный компьютер или настольный компьютер, или он может быть автономным устройством, таким как персональное цифровое устройство (PDA). Беспроводной терминал можно также называть системой, абонентским устройством, абонентской станцией, мобильной станцией, мобильным терминалом, удаленной станцией, точкой доступа, удаленным терминалом, терминалом доступа, пользовательским терминалом, пользовательским агентом, пользовательским устройством, находящимся у абонента устройством или устройством оборудованием. Беспроводной терминал может быть абонентской станцией, беспроводным устройством, сотовым телефоном, PCS-телефоном, радиотелефоном, телефоном по протоколу инициирования сеанса (SIP), станцией беспроводного абонентского доступа (WLL), персональным цифровым устройством (PDA), карманным устройством, имеющим поддержку беспроводного подключения, или другим устройством обработки, подключенным к беспроводному модему.
Базовая станция может означать устройство в сети доступа, которое обменивается данными по радиоинтерфейсу посредством одного или более секторов с терминалами доступа. Базовая станция может выступать в качестве маршрутизатора между беспроводным терминалом и остальной частью сети доступа, которая может включать в себя IP-сеть, посредством преобразования принимаемых кадров радиоинтерфейса в IP-пакеты. Базовая станция также координирует управление атрибутами для радиоинтерфейса. Помимо этого, различные варианты осуществления описываются в данном документе в связи с базовой станцией. Базовая станция может быть использована для обмена данными с мобильным устройством(ами) и также может упоминаться как точка доступа, узел B, усовершенствованный узел B (eNodeB) или какой-либо другой термин.
Фиг.1 иллюстрирует систему 100 беспроводной связи с множественным доступом, в которой точка 110 доступа с несколько антеннами 113-128 одновременно планирует и обменивается данными с различными мобильными терминалами в режимах работы SIMO, SU-MIMO и MU-MIMO согласно аспектам, раскрытым в данном документе. Режим работы является динамическим: точка 110 доступа может повторно планировать режим работы каждого из терминалов 130-160 и 1701-1706. В свете сказанного, фиг.1 иллюстрирует изображение линий связи между терминалами и антеннами. Как проиллюстрировано, такие терминалы могут быть стационарными или мобильными и рассредоточенными по всей соте 180. При использовании в данном документе и, в общем, в данной области техники термин "сота" может относиться к базовой станции 110 и/или ее географической области 180 покрытия в зависимости от контекста, в котором используется термин. Дополнительно, терминал (к примеру, 130-160 и 1701-1706) может обмениваться данными с любым числом базовых станций (к примеру, с показанной точкой 110 доступа) либо ни с одной из базовых станций в любой данный момент. Следует отметить, что терминал 130 имеет одну антенну, и поэтому он практически всегда работает в режиме SIMO.
В общем, точка 110 доступа обладает NT≥1 передающих антенн. Антенны в точке 110 доступа (AP) проиллюстрированы в нескольких группах антенн, одна из которых включает в себя 113 и 128, другая включает в себя 116 и 119 и дополнительная включает в себя 122 и 125. На фиг.1, две антенны показаны для каждой группы антенн, хотя больше или меньше антенн может быть использовано для каждой группы антенн. На фиг.1 терминал 130 доступа (AT) работает в режиме связи SIMO с антеннами 125 и 122, где антенны 125 и 122 передают информацию в терминал 130 доступа по прямой линии 135FL связи и получают информацию от терминала 130 доступа по обратной линии 135RL связи. Мобильные терминалы 140, 150 и 160 обмениваются данными в режиме SU-MIMO с антеннами 119 и 116. MIMO-каналы формируются между каждым из терминалов 140, 150 и 160 и антеннами 119 и 116, приводя к различным FL 145FL, 155FL, 165FL и различным RL 145RL, 155RL, 165RL. Дополнительно на фиг.1 группа 185 терминалов 1701-1706 планируется в режиме MU-MIMO, формируя несколько MIMO-каналов между терминалом в группе 185 и антеннами 128 и 113 в точке 110 доступа. Прямая линия 175FL связи и обратная линия 175RL связи RL указывают несколько FL и RL, существующих между терминалами 1701-1706 и базовой станцией 110.
В одном аспекте усовершенствованная система, такая как LTE, может использовать режим MIMO для как дуплексной связи с частотным разделением каналов (FDD), так и дуплексной связи с временным разделением каналов (TDD). При FDD-связи линии 135RL-175RL связи используют отличные полосы частот от соответствующих линий 135FL-175FL связи. При TDD-связи линии 135RL-175RL и 135FL-175FL связи используют одинаковые частотные ресурсы; тем не менее, такие ресурсы совместно используются с течением времени для обмена данными по прямой линии связи и по обратной линии связи.
В другом аспекте система 100 может использовать одну или более схем множественного доступа, такие как CDMA, TDMA, FDMA, OFDMA, FDMA с одной несущей (SC-FDMA), множественный доступ с пространственным разделением (SDMA) и/или другие подходящие схемы множественного доступа. TDMA использует мультиплексирование с временным разделением (TDM), в котором передачи для различных терминалов 130-160 и 1701-1706 ортогонализированы посредством передачи в различные временные интервалы. FDMA использует мультиплексирование с частотным разделением (FDM), в котором передачи для различных терминалов 130-160 и 1701-1706 ортогонализированы посредством передачи в различных частотных поднесущих. В качестве примера, системы TDMA и FDMA также могут использовать мультиплексирование с кодовым разделением (CDM), в котором передачи для нескольких терминалов (к примеру, 130-160 и 1701-1706) могут быть ортогонализированы с помощью различных ортогональных кодов (к примеру, кодов Уолша-Адамара) даже при том, что эти передачи отправляются в одном интервале времени или на одной частотной поднесущей. OFDMA использует мультиплексирование с ортогональным частотным разделением (OFDM), а SC-FDMA использует FDM с одной несущей. OFDM и SC-FDM могут секционировать полосу пропускания системы на несколько ортогональных поднесущих (к примеру, тоны, элементы разрешения и т.д.), каждая из которых может модулироваться с помощью данных. Обычно символы модуляции отправляются в частотной области при OFDM и во временной области при SC-FDM. Дополнительно и/или альтернативно, полоса пропускания системы может быть разделена на одну или более частотных несущих, каждая из которых может содержать одну или более поднесущих. Хотя структура контрольных сигналов и планирование пользователей SIMO, SU-MIMO и MU-MIMO, описанные в данном документе, в общем, поясняются для OFDMA-системы, следует принимать во внимание, что способы, раскрытые в данном документе, аналогично могут быть применены практически к любой системе беспроводной связи, работающей при множественном доступе.
В дополнительном аспекте базовые станции 110 и терминалы 120 в системе 100 могут обмениваться данными с помощью одного или более каналов передачи данных и служебными сигналами с помощью одного или более каналов управления. Каналы передачи данных, используемые посредством системы 100, могут быть назначены активным терминалам 120 так, что каждый канал передачи данных используется только одним терминалом в любой данный момент времени. Альтернативно, каналы передачи данных могут быть назначены нескольким терминалам 120, которые могут быть наложены или ортогонально запланированы на канале передачи данных. Чтобы сэкономить системные ресурсы, каналы управления, используемые посредством системы 100, также могут быть совместно использованы среди нескольких терминалов 120 с помощью, например, мультиплексирования с кодовым разделением. В одном примере каналы передачи данных, ортогонально мультиплексированные только по частоте и времени (к примеру, каналы передачи данных, не мультиплексированные с помощью CDM), могут быть менее подвержены потере в ортогональности, обусловленной характеристиками каналов и недостатками приемного устройства, чем соответствующие каналы управления.
Каждая группа антенн и/или область, для которой они предназначены осуществлять связь, зачастую упоминается как сектор точки доступа. Сектор может быть всей сотой 180, как проиллюстрировано на фиг.1, или меньшей зоной. Как правило, когда разбита на сектора, сота (к примеру, 180) включает в себя небольшое число секторов (не показаны), покрываемых посредством отдельной точки доступа, например, 110. Следует принимать во внимание, что различные аспекты, раскрытые в данном документе, могут использоваться в системе, имеющей секторизованные и/или несекторизованные соты. Дополнительно, следует принимать во внимание то, что все подходящие сети беспроводной связи, имеющие любое число секторизованных и/или несекторизованных сот, находятся в пределах объема прилагаемой формулы изобретения. Для простоты термин "базовая станция" при использовании в данном документе может упоминаться как станция, которая обслуживает сектор, так и станция, которая обслуживает соту. Хотя последующее описание для простоты, в общем, относится к системе, в которой каждый терминал обменивается данными с одной обслуживающей точкой доступа (к примеру, 110), следует дополнительно принимать во внимание, что терминалы могут обмениваться данными практически с любым числом обслуживающих точек доступа.
При осуществлении обмена данными по прямым линиям 135FL-175FL связи передающие антенны точки 110 доступа могут использовать формирование диаграммы направленности (к примеру, чтобы осуществлять связь SDMA), для того чтобы улучшить отношение "сигнал-шум" прямых линий связи для различных терминалов 130-160 и 1701-1706 доступа. Кроме того, точка доступа, использующая формирование диаграммы направленности для того, чтобы передавать в терминалы доступа, рассредоточенные произвольно по ее зоне покрытия, вызывает меньше помех для терминалов доступа в соседних сотах, чем точка доступа, передающая через одну антенну во все свои терминалы доступа.
Следует отметить, что базовая станция 110 может обмениваться данными через транзитную сеть с другими базовыми станциями (не показаны), которые обслуживают другие соты (не показаны) в сотовой сети, частью которой является сота 180. Такая связь является связью "точка-точка", осуществляемой по магистрали сотовой сети, которая может использовать линии связи типа T-carrier/E-carrier (к примеру, линии T1/E1), а также Интернет-протокол (IP) на основе пакетов.
Фиг.2 является блок-схемой высокого уровня системы 200, которая упрощает динамическое централизованное планирование и совместную работу в UL терминала доступа в режиме SIMO, SU-MIMO или MU-MIMO. Терминал 220 доступа передает системную информацию (CQI 239, смещение 243 спектральной плотности мощности (PSD) и контрольный сигнал(ы) 247) через обратную линию 235 связи в узел B 250, который обрабатывает такую информацию и передает назначение 261 ресурсов в терминал доступа через DL 265. Следует отметить, что терминал 220 доступа может работать с вплоть до NR≥1 физических антенн для ассоциативно связанных приемо-передающих устройств (не показаны), а узел B 250 работает с NT>1 антенн. Дополнительно следует отметить, что, хотя режим MU-MIMO включает несколько терминалов, планирование этого режима согласно аспектам настоящего изобретения базируется на передаче системной информации из одного терминала. Далее описываются различные аспекты настоящего новшества, которые упрощают совместную работу в режиме SIMO, SU-MIMO и MU-MIMO.
MIMO-канал, формируемый посредством NT передающих и NR приемных антенн, является матричным каналом NR×NT комплексных чисел, которые могут быть разложены (через разложение по собственным значениям) на NV независимых (собственных) каналов, которые также упоминаются как пространственные каналы либо ортогональные потоки или уровни, где 1≤NV≤min{NT, NR} является пространственным мультиплексированием или порядком разнесения. Каждый из NV независимых каналов соответствует размерности. Следует принимать во внимание, что осуществление связи с использованием ортогонального потока не вызывает межпотоковых помех. Такое разложение обеспечивает возможность формирования виртуальных антенн, которые могут быть заданы как повороты физических антенн, которые равномерно используют NT физических антенн в передающем устройстве, при этом статистика канала сохраняется, и мощность распределяется равномерно среди физических антенн. Такие повороты характеризуются посредством унитарной матрицы U NT×NT (U H U=UU H=1, где 1 является единичной матрицей NT×NT, а U H является эрмитово сопряженной матрицей U), которая используется. Число доступных поднаборов виртуальных антенн [n(V)] зависит и от NT, и от NR:
n(V)=Σ1≤q≤min{NT,NR}NT![q!(NT-q)!]-1, (1)
где n!=1·2...(n-1)·n является функцией факториала для целого числа n. Для симметричной (NT, NR=NT) конфигурации TX- и RX-антенн уравнение (3) прогнозирует  возможных неэквивалентных наборов виртуальных антенн. Каждый из этих наборов имеет NV виртуальных антенн.
возможных неэквивалентных наборов виртуальных антенн. Каждый из этих наборов имеет NV виртуальных антенн.
CQI 239 - терминал 220 доступа передает CQI 239 в UL 235 из одной физической антенны или виртуальной антенны независимо от числа разрешенных физических/виртуальных, доступных для мобильного устройства. Такое определение гарантирует, что терминалы с NR=1 могут быть запланированы совместно с терминалами с большим числом антенн. Сообщенный CQI 239 основан на принимаемой известной контрольной последовательности символов, которая передается посредством обслуживающей базовой станции (к примеру, узла B 250). Могут использоваться различные последовательности, например: последовательность с постоянной амплитудой и нулевой автокорреляцией (CAZAC), псевдослучайный код или псевдошумовая последовательность, последовательность Голда, последовательность Уолша-Адамара, экспоненциальная последовательность, последовательность Голомба, последовательность Райса, M-последовательность или обобщенная линейно-частотно-модулированная последовательность (GCL) (к примеру, последовательность Задова-Чу). В одном аспекте компонент 224 формирования CQI принимает контрольный сигнал, переносимый согласно конкретному режиму работы с множественным доступом (к примеру, CDMA, FDMA или TDMA), и определяет CQI. После определения значения CQI терминал 220 доступа, через компонент 224 формирования, передает канал CQI, который сообщает CQI 239, используя опорный уровень мощности или спектральной плотности мощности. Содержимое канала CQI, к примеру CQI 239, модулируется с помощью последовательности с постоянной амплитудой и нулевой автокорреляцией (CAZAC). Индикатор качества канала может быть основан, по меньшей мере, на одном из отношения "сигнал-помеха", отношения "сигнал-шум", отношения "сигнал-к-помехам-и-шуму" и т.д. В дополнительном аспекте мобильное устройство может определять, использовать физические антенны или виртуальные антенны для передачи CQI 239. Следует принимать во внимание, что такая гибкость возникает из того факта, что CQI 239 обрабатывается/определяется в терминале 220 доступа, и узел B 250 может обходиться без сведений о том, используется физическая или виртуальная антенна для передачи CQI, поскольку фактической информацией, которая требуется, является значение индикатора качества канала. Следует отметить, тем не менее, что CQI 239 обнаруживается в точке 250 доступа через компонент 254 обнаружения.
ΔPSD 243 - терминал 220 доступа всегда возвращает одну ΔPSD; регулирование (к примеру, управление) спектральной плотности мощности (PSD), которая определяется, по меньшей мере, частично на основе опорного уровня PSD передаваемого CQI-канала, который сообщает CQI 239, и ассоциативно связанной физической или виртуальной антенны, которую терминал (к примеру, 220) использует для передачи CQI (см. ниже). Передача одной ΔPSD 243 предоставляет совместимость с планированием терминала при NR=1 совместно с терминалами, запланированными в SU-MIMO и/или MU-MIMO. Следует принимать во внимание, что хотя канал CQI используется в качестве опорного сигнала для управления мощностью, практически любой другой опорный сигнал, передаваемый при опорном уровне PSD и переносимый через соответствующий канал, может быть использован для управления мощностью, а также для того, чтобы определять ΔPSD 243.
Контрольный сигнал(ы) 247 - зондирующие (контрольные) опорные сигналы могут периодически передаваться от нескольких физических или виртуальных антенн в терминале с поддержкой MIMO (к примеру, NR>1), чтобы выполнять оценку MIMO-канала в передающем устройстве, к примеру узле B 250. Абонентское устройство SIMO переносит один контрольный сигнал, передаваемый из одной антенны. Следует принимать во внимание, что зондирование MIMO-канала необходимо для того, чтобы извлекать выгоду из формирования диаграммы направленности или предварительного кодирования, усиления пропускной способности (и производительности) MIMO, а также многопользовательского разнесения. Зондирующие опорные сигналы (RS) формируются в терминале доступа (к примеру, 220) посредством компонента 228 формирования контрольных сигналов. В аспекте сформированные контрольные последовательности могут быть CAZAC-последовательностью, псевдослучайным кодом или псевдошумовой последовательностью, последовательностью Голда, последовательностью Уолша-Адамара, экспоненциальной последовательностью, последовательностью Голомба, последовательностью Райса, M-последовательностью или GCL-последовательностью. Следует принимать во внимание, тем не менее, что поскольку мобильные устройства, передающие зондирующие RS, могут совместно использовать каналы множественного доступа для мультиплексирования, ортогональные RS могут уменьшить помехи между несущими, повышая вероятность успешного декодирования в базовой станции (например, 250) и тем самым сокращая передачу служебной информации посредством уменьшения циклов повторной передачи.
Следует отметить, что перестановка антенн не применяется к зондирующим RS, чтобы обеспечить гибкость динамического планирования SU-MIMO и MU-MIMO.
Аналогично случаю CQI, точка 250 доступа может обходиться без сведений о том, использовалось отображение физической антенны или виртуальной антенны для того, чтобы передавать зондирующий (контрольный) опорный сигнал(ы) 247.
Информация, переносимая посредством терминала 220 доступа, используется посредством точки 250 доступа для того, чтобы планировать, через планировщик 258, режим работы (к примеру, SIMO, SU-MIMO и MU-MIMO) мобильного терминала. Пользователи (к примеру, терминалы доступа 1701-1706) могут быть запланированы для того, чтобы максимизировать целевую функцию, такую как производительность сектора, пропускную способность сектора или потребление мощности множеством пользователей. Помимо этого, определения планирования выполняются посредством планировщика 258, чтобы достичь заранее определенного качества обслуживания, такого как конкретная частота ошибок в разряде, конкретное время задержки или конкретная спектральная эффективность. Несколько классических алгоритмов (к примеру, циклический алгоритм, справедливая организация очереди, пропорциональная равнодоступность и планирование с максимальной производительностью) и квантовых алгоритмов (к примеру, квантовый генетический алгоритм) могут использоваться для определенного оптимального режима работы. Процессор 262 может выполнять часть алгоритмов, используемых для планирования. Алгоритмы, инструкции, чтобы выполнять их, и принимаемая управляющая информация, к примеру CQI 239, ΔPSD 243 и контрольный сигнал(ы) 247, могут быть сохранены в запоминающем устройстве 266. Далее описывается планирование SIMO, SU-MIMO и MU-MIMO.
Режим SIMO - планировщик 258 определяет скорость передачи данных на основе чистого уровня PSD, который является результатом добавления PSD опорного сигнала, переносимого в терминал доступа, чтобы определять CQI 239 и сообщенную ΔPSD 243 от каждого из UE, которые определены для планирования в режиме SIMO. Терминал доступа с самым высоким показателем планирования согласно алгоритму планирования планируется с этой скоростью.
SU-MIMO режим - планировщик 258 сначала оценивает MIMO-канал из принимаемого контрольного сигнала(ов) 247. В случаях, в которых перестановка антенн должна быть использована для передачи в SU-MIMO, оцененный MIMO-канал переставляется согласно конкретному шаблону перестановок, определенному посредством точки 250 доступа, чтобы обеспечить точные определения скорости. Следует принимать во внимание, что шаблон перестановок может быть характеризован посредством унитарной матрицы P (PP +=P+ P=1, где 1 является единичной матрицей NV×NV), заданной в подпространстве ортогональных уровней NV, так что кодовое слово в первом уровне переставляется на второй уровень в каждом тоне или поднесущей, назначенной для связи. Перестановки являются, в общем, циклическими или псевдослучайными. Унитарная матрица P должна быть известна в точке 250 доступа терминал 220 доступа. Следует принимать во внимание, что часть вычислений, включенных в определение скорости, может быть выполнена посредством процессора 262. Аналогично, процессор 262 может выполнять перестановку антенн.
Компонент 254 обнаружения может включать в себя компенсатор по методу минимальной среднеквадратической ошибки (MMSE), фильтр с форсированием нуля (ZF) или фильтр объединения с максимальным отношением (MRC). Эти компоненты обнаружения могут дополнительно включать компонент последовательного подавления помех (SIC). Компонент декодирования может быть использован для того, чтобы определять PSD для каждого принимаемого контрольного сигнала(ов) 247.
PSD данных (к примеру, PSD для передачи данных в RL), которая извлекается из первого принимаемого потока без учета межпотоковых или межпользовательских помех, диктуется посредством PSD опорного сигнала в дополнение к ΔPSD 243. PSD данных из оставшихся (контрольных) потоков соответствуют PSD данных первого потока с регулированием PAR и корректировкой дифференциалов трактов согласно MIMO-каналу. Следует принимать во внимание, что результирующий уровень PSD должен быть уменьшен согласно числу запланированных MIMO-потоков, чтобы поддерживать неизменную полную передаваемую мощность от терминала 220. В качестве примера, в случае, когда два потока планируются (через планировщик 258), ΔPSD эффективно уменьшается наполовину для каждой из антенн, включенных в передачу данных. Помимо этого, ΔPSD должна регулироваться на основе назначенной полосы пропускания для терминала доступа, когда назначенный блок ресурсов меньше запрошенного. После того как PSD данных определена, вычисление скорости для различных потоков с приемным устройством MMSE и приемным устройством MMSE-SIC может быть выполнено. Процессор 262 может выполнить часть такого вычисления.
Режим MU-MIMO - точка 250 доступа сначала оценивает MIMO-канал из широкополосных контрольных сигналов для терминалов (к примеру, 1701-1706), запрашивающих передачу данных. Как пояснено выше, каждый из терминалов передает CQI 239, ΔPSD 243 и контрольный сигнал(ы) 247. Следует принимать во внимание, что терминал доступа (к примеру, 220), который запрашивает передачу данных, может быть терминалом доступа, который ранее запланирован, и в этом случае число антенн, которые терминал доступа использует для того, чтобы передавать зондирующие RS, известно точке доступа (к примеру, 250); эта информация может быть сохранена в запоминающем устройстве 266. Тем не менее, если беспроводной терминал ранее не запланирован, точка доступа может планировать беспроводной терминал запроса на близком к оптимальному уровне вследствие отсутствия сведений о конфигурации антенн. Следует отметить, что канал, оцененный из нескольких потоков данных, принимаемых от пользователя MU-MIMO, должен быть переставлен с помощью шаблона перестановок P', который должен быть использован при передаче данных терминала доступа.
Как только MIMO-канал оценен, скорость передачи данных вычисляется из последовательного декодирования PSD контрольного сигнала(ов) 247. Декодирование может быть осуществлено через компонент 254 обнаружения, который может включать в себя приемное устройство MMSE-SIC. После успешного декодирования нескольких принимаемых потоков, ассоциативно связанных с контрольным сигналом(ами) 247, вычисляется скорость для каждого потока. Процессор 262 может выполнить часть вычислений скорости.
Чтобы (повторно) планировать терминал 220 в режиме работы SIMO, SU-MIMO или MU-MIMO, точка 250 доступа переносит назначение 261 ресурсов в терминал 220 доступа, со скоростью передачи данных, смещением скорости передачи данных, выбором поднабора антенн для передачи и выбором диаграммы направленности антенны.
Фиг.3A является схематичным представлением 300, которое иллюстрирует относительную величину мощности опорного сигнала, PREF 310, используемую мобильным терминалом, чтобы передавать опорный сигнал канала CQI, сообщающий значение CQI, и PSDDATA 315, используемую для того, чтобы передавать данные по RL. PSDDATA определяется через ΔPSD 320, возвращаемую посредством мобильного терминала (к примеру, 130, 140 или 220), который сообщает CQI. Как пояснено выше, одна (физическая или виртуальная) антенна, используемая для того, чтобы сообщать CQI, используется для того, чтобы передавать ΔPSD 320 независимо от доступных антенн в терминал. Когда используется физическая антенна, ΔPSD 320 может быть вычислена (например, посредством процессора 232) на основе запаса мощности усилителя мощности (PA) в антенне, используемой для того, чтобы сообщать CQI 239, и индикаторов нагрузки, принимаемых от соседних сот, а также сообщенного CQI 239. Помимо этого, другие факторы, такие как предполагаемое время работы аккумулятора, тип приложения, выполняемого посредством беспроводного терминала, - к примеру, беспроводной терминал, который должен выполнять приложение, которое требует того, чтобы поддерживать активную линию связи до завершения задачи, такой как передача денежных средств при онлайновом банковском обслуживании, могут игнорировать индикаторы помех от других секторов и сообщать ΔPSD 320, более высокую, чем ожидается с точки зрения межсотовых помех. Если виртуальная антенна используется и PA каждой физической антенны, доступной для терминала, имеет практически тот же самый тип (к примеру, напряжение питания, полное сопротивление ввода-вывода и так далее), ΔPSD 320 может быть вычислена на основе оставшегося запаса мощности практически любого из PA, который управляет практически любой из физических антенн, объединенных так, чтобы составить виртуальную антенну. PA лучше используется, когда CQI 243 переносится из виртуальной антенны. Альтернативно или помимо этого, ΔPSD 320 может быть табулировано на основе схемы модуляции и кодирования, назначаемой терминалу доступа.
Фиг.3B является схематичным представлением 350 зондирующих (контрольных) опорных сигналов. Зондирующие RS P1-PV 3731-373V, P'1-P'V 3761-376V, P"1-P"V 3791-379V и т.д. периодически передаются с периодом τ 360, который определяется посредством временных характеристик затухания (к примеру, быстрого или медленного) канала связи. В качестве примера, в канале с достаточно медленным затуханием по сравнению с отрезком времени трафика UL для конкретного пользователя 1/τ является очень небольшим. Следует отметить, что период τ 360 является адаптивным, регулируется посредством терминала доступа (к примеру, 130, 140 или 220) по мере того, как характеристики канала (к примеру, сообщенный CQI 243) обнаруживаются. Следует принимать во внимание, что τ уменьшается, улучшение обработки может быть реализовано в принимающей точке доступа; тем не менее, объем передаваемой служебной информации возрастает. В аспекте RS охватывает интервал Δt 365, соответствующий тому, что называется в данном документе как "t-блок" 370. Такой t-блок может соответствовать одному или более временным квантам, переносящим опорный уровень. В качестве примера, t-блок 370 может соответствовать длинному блоку (LB) в субкадре в рамках структуры радиокадра в LTE. В другом примере t-блок может соответствовать нескольким LB, включающим различные субкадры связи. Следует принимать во внимание, что один t-блок определяется, Δt 365 устанавливается. Дополнительно следует принимать во внимание, что объем служебной информации возрастает вместе с Δt 365; тем не менее, транспортировка нескольких блоков, переносящих RS, может быть необходимой для того, чтобы гарантировать успешное декодирование в точке доступа (к примеру, узле B 250), особенно при плохих характеристиках канала. Компонент 228 формирования контрольных сигналов, вместе с процессором 232, может определять период τ 360 и охват t-блока Δt 365.
Как проиллюстрировано на фиг.3B, RS переносятся в смежных частотных ресурсах, к примеру, 3731-373V. Каждый из таких частотных ресурсов соответствует конкретному числу подполос частот, которые переносят последовательность, к примеру, P1-PV, или ее часть, для физической или виртуальной антенны J (J=1,...,V). Выделение с частотным перемежением частотных ресурсов, а также передача зондирующих RS также возможна.
Следует принимать во внимание, что схема опорного сигнала, чтобы сообщать CQI (к примеру, 239) и зондирование канала, а также схема управления мощностью (ΔPSD) являются практически одинаковыми для SIMO, SU-MIMO и MU-MIMO.
Фиг.4 является схематичным представлением 400, которое иллюстрирует назначение контрольных сигналов частотных ресурсов для нескольких пользователей. Чтобы достичь совместной производительности режима работы SIMO, SU-MIMO и MU-MIMO, необходимо сохранять ортогональность среди зондирующих RS пространственно разделенных пользователей. Чтобы сохранять ортогональность контрольных сигналов, максимальный разрешенный порядок пространственного мультиплексирования N для запланированного пользователя в пределах соты, извлеченный из зондирующих опорных сигналов, должен быть передан в широковещательном режиме посредством обслуживающей базовой станции пользователю. В качестве примера, а не ограничения, в случае если один SIMO-пользователь 130 планируется посредством базовой станции 110 в соте 180, этот пользователь может передавать зондирующие RS практически на всех доступных частотно-временных ресурсах 410. Тем не менее, когда SIMO-пользователь 130 планируется одновременно с другим SIMO-пользователем 140, каждый из упомянутых пользователей может использовать часть доступных частотно-временных ресурсов для того, чтобы переносить взаимно ортогональные контрольные сигналы - к примеру, поднесущие 430 могут использоваться пользователем 420, тогда как пользователь 430 может использовать поднесущие 440. Следует отметить, что защитные поднесущие 435 отделяют доступные частотные ресурсы, чтобы дополнительно гарантировать ортогональность. Контрольные сигналы переносятся в t-блоке 370, который охватывает интервал времени Δt 365. Следует принимать во внимание, что предыдущий пример может быть приведен для SU-MIMO-пользователя, MU-MIMO-пользователя или их комбинации вместо SIMO-пользователей 130 и 420.
Фиг.5 является схематичным представлением 500 примерных структур канала назначения UL для планирования совместной работы пользователей SIMO, SU-MIMO и MU-MIMO. Структуры 510 и 550 соответствуют соответственно максимальному порядку пространственного мультиплексирования NV=2 и NV=4. В аспекте назначение для запланированного абонентского устройства включает в себя базовую скорость, смещение (или дельта) скорости передачи данных для дополнительных потоков, в случае, если такие дополнительные потоки назначаются, индекс выбора поднабора антенн и выбор диаграммы направленности антенны. Как правило, назначения планирования переносятся посредством обслуживающей базовой станции (к примеру, 110) по физическому каналу управления нисходящей линии связи. В качестве примера, в LTE планирование назначений переносится по физическому каналу управления нисходящей линии связи (PDCCH). В общем, PDCCH может быть перенесен в субкадре (к примеру, субкадр LTE охватывает 0,5 мс, перенося 6 или 7 OFDM-символов в зависимости от длины циклического префикса). Структура 510 - скорость 515 передачи данных переносится с помощью 5 битов, а дельта 525 скорости передачи данных переносится с помощью 3 битов; выбору 535 поднабора антенн назначается 1 бит; а выбор 545 диаграммы направленности антенны передается с помощью 1 бита. Следует отметить, что выбор (индекс) 535 поднабора антенн может быть включен в дельту 525 скорости передачи данных. Кроме того, выбор диаграммы направленности антенны в 1 бит может быть удален, если практически во всех случаях точка доступа (к примеру, 110) спаривает пользователей с различными индексами виртуальной антенны. Посредством объединения пользователей с различными индексами виртуальной антенны профили излучения, ассоциативно связанные с поворотами, приводящими к упомянутым виртуальным антеннам, являются почти ортогональными, и межпотоковые помехи в значительной степени уменьшаются. Следовательно, структура 550 - настоящая структура передает скорость 555 передачи данных с помощью 5 битов и дельту 525 скорости передачи данных с помощью 3 битов. В отличие от структуры 510, выбор 575 поднабора антенн передается с помощью 4 битов; а выбор диаграммы направленности антенны передается с помощью 3 битов. Если назначаются только пользователи с различными индексами виртуальной антенны, 2 бита выбора диаграммы направленности антенны могут быть удалены. Шаблон контрольных сигналов должен быть определен непосредственно из индекса антенны.
Для обеих структур 510 и 520, при планировании SIMO-пользователей может быть уменьшен объем рабочих данных (или служебной информации), поскольку обслуживающая базовая станция (к примеру, узел B 250) и терминал пользователя (к примеру, терминал 220 доступа) знает, что может быть назначено не более одного потока. В таких случаях не обязательно должны назначаться дельты 525 и 565 скорости передачи данных и выбор 545 и 585 диаграммы направленности антенны. Следует принимать во внимание, что структуры 510 и 550 могут использоваться и в FDD, и в TDD. Дополнительно следует принимать во внимание то, что конкретное число битов, чтобы переносить назначение UL, раскрытое выше, может модифицироваться адаптивно в зависимости, по меньшей мере, от следующего: характеристик канала, числа пользователей в обслуживающей соте, оставшегося времени работы от аккумулятора в планируемом терминале, типа приложения, выполняемого или назначенного для выполнения посредством планируемого терминала, и так далее.
Фиг.6 является блок-схемой 600 варианта осуществления системы 610 передающего устройства (такой, как узел B 250) и системы 650 приемного устройства (к примеру, терминала 220 доступа) в системе со многими входами и многими выходами (MIMO), которая может предоставлять связь в соте (или секторе) в беспроводном окружении в соответствии с одним или более аспектами, изложенными в данном документе. В системе 610 передающего устройства данные трафика для ряда потоков данных могут быть предоставлены из источника 612 данных в процессор 614 данных передачи (TX). В варианте осуществления каждый поток данных передается по соответствующей передающей антенне. Процессор 614 TX-данных форматирует, кодирует и перемежает данные трафика для каждого потока данных на основе конкретной схемы кодирования, выбранной для этого потока данных, чтобы предоставлять закодированные данные. Закодированные данные для каждого потока данных могут быть мультиплексированы с контрольными данными с использованием OFDM-способов. Контрольные данные типично являются известным шаблоном данных, который обрабатывается известным способом и может быть использован в системе приемного устройства для того, чтобы оценить отклик канала. Мультиплексированные контрольные сигналы и кодированные данные для каждого потока данных далее модулируются (к примеру, символьно отображаются) на основе конкретной схемы модуляции (к примеру, двоичной фазовой манипуляции (BPSK), квадратурной фазовой манипуляции (QPSK), многофазовой манипуляции (M-PSK) или М-квадратурной амплитудной манипуляции (M-QAM)), выбранной для этого потока данных, чтобы предоставить символы модуляции. Скорость передачи данных, кодирование и модуляция для каждого потока данных могут быть определены посредством инструкций, выполняемых посредством процессора 630, инструкции, а также данные могут быть сохранены в запоминающем устройстве 632.
Символы модуляции для всех потоков данных затем предоставляются в TX MIMO-процессор 620, который может дополнительно обрабатывать символы модуляции (к примеру, OFDM). TX MIMO-процессор 620 далее предоставляет NT потоков символов модуляции в NT приемо-передающих устройств (TMTR/RCVR) 622A-622T. В конкретном варианте осуществления TX MIMO-процессор 620 применяет весовые коэффициенты формирования диаграммы направленности к символам потоков данных и к антенне, из которой передается символ. Каждое приемо-передающее устройство 622 принимает и обрабатывает соответствующий поток символов, чтобы предоставлять один или более аналоговых сигналов, и дополнительно приводит к требуемым параметрам (к примеру, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы, чтобы предоставлять модулированный сигнал, подходящий для передачи по MIMO-каналу. NT модулированных сигналов из приемо-передающих устройств 622A-622T затем передаются из NT антенн 6241-624T соответственно. В системе 650 приемного устройства передаваемые модулированные сигналы принимаются посредством NR антенн 6521-652R, и принимаемый сигнал из каждой антенны 652 предоставляется в соответствующее приемо-передающее устройство (RCVR/TMTR) 654A-654R. Каждое приемо-передающее устройство 6541-654R приводит к требуемым параметрам (к примеру, фильтрует, усиливает и преобразует с понижением частоты) соответствующий принимаемый сигнал, оцифровывает приведенный к требуемым параметрам сигнал, чтобы предоставлять выборки, и дополнительно обрабатывает выборки, чтобы предоставлять соответствующий "принимаемый" поток символов.
Процессор 660 RX-данных далее принимает и обрабатывает NR принимаемых потоков символов от NR приемо-передающих устройств 6541-654R на основе конкретного способа обработки приемного устройства, чтобы предоставить NT "обнаруженных" потоков символов. Процессор 660 RX-данных после этого демодулирует, обратно перемежает и декодирует каждый обнаруженный поток символов, чтобы восстановить данные трафика для потока данных. Обработка посредством процессора 660 RX-данных комплементарна обработке, выполняемой посредством TX MIMO-процессора 620 и процессора 614 TX-данных в системе 610 передающего устройства. Процессор 670 периодически определяет, какую матрицу предварительного кодирования использовать, и эта матрица может быть сохранена в запоминающем устройстве 672. Процессор 670 формулирует сообщение обратной линии связи, содержащее часть индекса матрицы и часть значения ранга. Запоминающее устройство 672 может сохранять инструкции, которые, когда выполняются посредством процессора 670, имеют результатом формулирование сообщения обратной линии связи. Сообщение обратной линии связи может содержать различные типы информации, относящейся к линии связи и/или принимаемому потоку данных или к их комбинации. В качестве примера, такая информация может содержать индикатор(ы) качества канала (такие, как CQI 239), смещение для регулирования запланированного ресурса (такого, как ΔPSD 243) и/или зондирующие опорные сигналы для оценки линии связи (или канала). Сообщение обратной линии связи может быть обработано посредством процессора 638 TX-данных, который также принимает данные трафика для ряда потоков данных из источника 636 данных, модулированных посредством модулятора 680, приведенных к требуемым параметрам посредством приемо-передающих устройств 654a-954r и переданных обратно в систему 610 передающего устройства.
В системе 610 передающего устройства модулированные сигналы из системы 650 приемного устройства принимаются посредством антенн 6241-624T, приводятся к требуемым параметрам посредством приемо-передающих устройств 622A-622T, демодулируются посредством демодулятора 640 и обрабатываются посредством процессора 642 RX-данных, чтобы извлечь сообщение обратной линии связи, переданное посредством системы 650 приемного устройства. Процессор 630 затем определяет то, какую матрицу предварительного кодирования использовать для определения весовых коэффициентов формирования диаграммы направленности, и далее обрабатывает извлеченное сообщение.
Как пояснено выше в связи с фиг.2, приемное устройство 650 может быть динамически запланировано так, чтобы работать в SIMO, SU-MIMO и MU-MIMO. Далее описывается обмен данными в этих режимах работы. Следует отметить, что в SIMO-режиме одна антенна в приемном устройстве (NR=1) используется для обмена данными; следовательно, режим работы SIMO может быть интерпретирован как особый случай SU-MIMO. Однопользовательский MIMO-режим работы соответствует случаю, в котором одна система 650 приемного устройства обменивается данными с системой 610 передающего устройства, как ранее проиллюстрированный на фиг.6 и согласно операции, описанной в связи с ним. В этой системе NT передающих устройств 6241-624T (также известных, как TX-антенны) и NR приемных устройств 6521-652R (также известных, как RX-антенны) формируют матричный MIMO-канал (к примеру, релеевский канал или гауссов канал с медленным или быстрым затуханием) для беспроводной связи. Как упомянуто выше, SU-MIMO-канал описывается посредством матрицы NR×NT случайных комплексных чисел. Ранг канала равняется алгебраическому рангу матрицы NR×NT, при этом в отношении пространственно-временного или пространственно-частотного кодирования ранг равняется числу NV≤min{NT, NR} независимых потоков данных (или уровней), которые могут быть отправлены по SU-MIMO-каналу, не вызывая межпотоковых помех.
В одном аспекте в SU-MIMO-режиме передаваемые/принимаемые символы с OFDM, в тоне ω, могут моделироваться посредством следующего:
y(ω)=H(ω)c(ω)+n(ω). (2)
Здесь, y(ω) является принимаемым потоком данных, и он является вектором NR×1, H(ω) является матрицей NR×NT отклика канала в тоне ω (к примеру, преобразование Фурье матрицы h отклика канала с временной зависимостью), c(ω) является вектором выходных символов NT×1, а n(ω) является вектором шума NR×1 (к примеру, аддитивного белого гауссова шума). Предварительное кодирование может преобразовывать вектор уровня NV×1 в выходной вектор предварительного кодирования N×1. NV является фактическим числом потоков данных (уровней), передаваемых посредством передающего устройства 610, и NV могут быть запланированы на усмотрение передающего устройства (к примеру, передающего устройства 610, узла B 250 или точки 110 доступа), по меньшей мере, частично на основе характеристик канала (к примеру, сообщенного CQI) и ранга, сообщенного в запросе планирования посредством терминала (к примеру, приемного устройства 650). Следует принимать во внимание, что c(ω) является результатом, по меньшей мере, одной схемы мультиплексирования и, по меньшей мере, одной схемы предварительного кодирования (или формирования диаграммы направленности), примененной посредством передающего устройства. Дополнительно, c(ω) свертывается с помощью матрицы коэффициентов усиления по мощности, которая определяет величину мощности, которую передающее устройство 610 выделяет, чтобы передавать каждый поток данных NV. Следует принимать во внимание, что эта матрица коэффициентов усиления по мощности может быть ресурсом, который назначается терминалу (к примеру, терминалу 220 доступа, приемному устройству 650 или UE 140), и ей можно управлять через смещения регулирования мощности, такие как ΔPSD 243, как описано выше.
Как упомянуто выше, согласно аспекту, работа в режиме MU-MIMO набора терминалов (к примеру, мобильных устройств 1701-1706) находится в рамках настоящего новшества. Кроме того, запланированные терминалы MU-MIMO работают совместно с терминалами SU-MIMO и терминалами SIMO. Фиг.7 иллюстрирует примерную многопользовательскую MIMO-систему 700, в которой три AT 650P, 650U и 650S, осуществленные в приемных устройствах, практически таких же, как и приемное устройство 650, обмениваются данными с передающим устройством 610, которое осуществляет узел B. Следует принимать во внимание, что работа системы 700 представляет работу практически любой группы (к примеру, 185) беспроводных устройств, таких как терминалы 1701-1706, запланированных при работе MU-MIMO в пределах обслуживающей соты посредством централизованного планировщика, постоянно размещающегося в обслуживающей точке доступа (к примеру, 110 или 250). Как упомянуто выше, передающее устройство 610 имеет NT TX-антенн 6241-624T, и каждая AT имеет несколько RX-антенн; а именно, ATP имеет NP антенн 6521-652P, ATU имеет NU антенн 6521-652U, а APS имеет NS антенн 6521-652S. Связь между терминалами и точкой доступа осуществляется через восходящие линии 715P, 715U и 715S связи. Аналогично, нисходящие линии 710P, 710U и 710S связи упрощают связь между узлом B 610 и терминалами ATP, ATU и ATS соответственно. Дополнительно, связь между каждым терминалом и базовой станцией реализуется практически тем же самым способом, через практически те же самые компоненты, как проиллюстрировано на фиг.6 и в его соответствующем описании.
Терминалы могут находиться в существенно различных местоположениях в пределах соты, обслуживаемой посредством точки доступа 610 (к примеру, соты 180), поэтому каждое абонентское устройство 650P, 650U и 650S имеет собственный матричный MIMO-канал h α и матрицу отклика Hα (α=P, U и S) с собственным рангом (или, эквивалентно, разложением по сингулярным значениям). Внутрисотовые помехи могут присутствовать вследствие множества пользователей, присутствующих в соте, обслуживаемой посредством базовой станции 610. Такие помехи могут затронуть значения CQI, сообщаемые посредством каждого из терминалов 650P, 650U и 650S. Аналогично, помехи также могут затронуть возвращаемые значения смещений мощности (к примеру, ΔPSD 243), используемые для управления мощностью в узле B 610.
Хотя проиллюстрирована с тремя терминалами на фиг.7, следует принимать во внимание, что MU-MIMO-система может содержать любое число терминалов, причем каждый из этих терминалов указывается ниже с помощью индекса k. В соответствии с различными аспектами каждый из терминалов доступа 650P, 650U и 650S может сообщать CQI из одной антенны и может переносить обратную связь по смещению PSD, ассоциативно связанному с этой одной антенной, в узел B 610. Помимо этого, каждый из этих терминалов может передавать в узел B 610 зондирующие опорные сигналы из каждой антенны в наборе антенн, используемых для связи. Узел B 610 может динамически повторно планировать каждый из терминалов 650P, 650U и 650S в другом режиме работы, таком как SU-MIMO или SIMO.
В одном аспекте передаваемые/принимаемые символы с OFDM, в тоне ω и для пользователя k, могут моделироваться посредством следующего:
y k(ω)=H k(ω)c k(ω)+H k(ω)Σ'c m(ω)+n k(ω). (3)
При этом символы имеют такой же смысл, как в уравнении (1). Следует принимать во внимание, что вследствие многопользовательского разнесения, помехи от других пользователей в сигнале, принимаемом посредством пользователя k, моделируются с помощью второго члена в левой стороне уравнения (2). Надстрочный символ (') указывает, что передаваемый вектор символов c k исключен из суммирования. Члены в последовательности представляют прием посредством пользователя k (через его отклик канала H k) символов, передаваемых посредством передающего устройства (к примеру, точки 250 доступа) другим пользователям в соте.
В свете примерных систем, показанных и описанных выше, способы, которые могут быть реализованы в соответствии с раскрытым предметом изобретения, должны лучше приниматься во внимание со ссылкой на блок-схемы последовательности операций способа по фиг.8, 9 и 10. Хотя, в целях упрощения пояснения, способы показаны и описаны как последовательность этапов, необходимо понимать и принимать во внимание, что заявленный предмет изобретения не ограничен числом или порядком этапов, поскольку некоторые этапы могут осуществляться в другом порядке и/или параллельно с этапами, отличными от этапов, показанных и описанных в данном документе. Кроме того, не все проиллюстрированные этапы могут потребоваться для реализации способов, описанных далее. Должно быть принято во внимание, что функциональность, ассоциативно связанная с этапами, может быть реализована посредством программного обеспечения, аппаратных средств, их комбинации или любых других подходящих средств (к примеру, устройства, системы, процесса, компонента и т.д.). Дополнительно, следует принимать во внимание, что способы, раскрываемые далее и на всем протяжении этого описания изобретения, являются сохраняемыми в изделии, чтобы упрощать перенос и передачу этих способов в различные устройства. Специалисты в данной области техники должны понимать и принимать во внимание, что способ альтернативно может быть представлен как последовательность взаимосвязанных состояний или событий, к примеру, на диаграмме состояний.
Фиг.8 представляет блок-схему последовательности операций способа 800 управления мощностью и передачей контрольных сигналов для совместной работы в SIMO, SU-MIMO и MU-MIMO. На этапе 810 канал индикатора качества канала (CQI) или опорный сигнал передается из одной антенны в наборе из M антенн. Следует принимать во внимание, что, хотя канал управления CQI может использоваться для управления мощностью, как описано в связи с фиг.2, практически любой опорный канал (сигнал) может использоваться с этой целью. M антенн дают возможность терминалу доступа (к примеру, 220) обмениваться данными/работать в обслуживающей соте (к примеру, 180), в которой несколько терминалов доступа обмениваются данными с базовой станцией в режиме SIMO, SU-MIMO и MU-MIMO (фиг.1). В аспекте CQI определяется из опорного сигнала, передаваемого посредством обслуживающей базовой станции, и может использоваться для того, чтобы оценивать канал нисходящей линии связи во время обмена данными, в дополнение к использованию переносимого CQI в качестве параметра в алгоритме планирования (в обслуживающем секторе), который назначает ресурсы. На этапе 820 PSD-смещение (ΔPSD 243) переносится из антенны, используемой для того, чтобы передавать CQI. Это смещение может быть оценено на основе определенного значения CQI, а также индикаторов нагрузки, ассоциативно связанных с межсотовыми помехами. Передаваемое PSD-смещение может быть табулировано (в дБ) согласно схеме модуляции и кодирования, назначенной сообщающему терминалу доступа (к примеру, терминалу 220 доступа). PSD-смещение определяет мощность, на которой сообщающий терминал передает данные в обратной линии связи, как пояснено в связи с фиг.2. На этапе 830 выполняется запрос по числу антенн в наборе из M антенн. Число M>1 приводит к этапу 840, на котором контрольный сигнал передается из каждой из M антенн. В аспекте контрольные сигналы могут использоваться для того, чтобы определять канал связи (к примеру, зондированием канала) между терминалом, выполняющим передачу контрольных сигналов, и базовой станцией, принимающей опорные сигналы.
Как пояснено в связи с фиг.3B, зондирующие (контрольные) опорные сигналы могут периодически передаваться либо мультиплексированными с данными в обмене данными, либо без одновременной передачи данных. Последнее соответствует использованию ресурсов в терминале, поскольку время работы от аккумуляторов может быть уменьшено, если зондирование канала осуществляется в течение периода отключенной передачи в терминале. Тем не менее, доступ к оценке канала может иметь результатом возможности назначения в обслуживающей базовой станции, которые приводят к улучшению ресурсов, доступных для терминала, или к новому запланированному режиму работы с повышенной производительностью (к примеру, более высокой пиковой скоростью передачи данных, производительностью, меньшими помехами и так далее). Результат M=1 на запрос 830 не приводит к каким-либо дополнительным действиям.
Фиг.9 представляет блок-схему последовательности операций способа 900 для планирования режима работы SIMO, SU-MIMO или MU-MIMO. На этапе 910 SIMO/MIMO-канал оценивается. Для пользователей с одной передающей антенной (к примеру, терминала 130) SIMO-канал оценивается, тогда как MIMO-канал оценивается для пользователей с несколькими передающими антеннами (к примеру, точек 650U, 650P и 650S доступа или терминалов 1701-1706). Оценка может быть выполнена через зондирование канала, т.е. перенос контрольных сигналов или зондирующих опорных сигналов, сформированных в терминале доступа (к примеру, в компоненте 228 формирования контрольных сигналов) и обнаруженных и обработанных в базовой станции. В качестве примера, узел B (к примеру, 250) оценивает SIMO/MIMO из набора контрольных сигналов, принимаемых от набора из M антенн в терминале доступа (к примеру, 220). Оценка канала предусматривает определение максимального порядка мультиплексирования NV или числа линейно независимых, ортогональных уровней или потоков данных, поддерживаемых посредством канала. На этапе 920 проверяется присутствие перестановки антенн. Положительный результат проверки указывает, что несколько пользователей запланированы в режиме MU-MIMO, который типично требует перестановки антенн, и тем самым на этапе 930 определяется шаблон перестановок. Шаблон перестановок может быть характеризован посредством унитарной матрицы P (PP +=P+ P=1NV×NV), заданной в подпространстве уровней NV (к примеру, NV×NV), так что кодовое слово в первом уровне переставляется на второй уровень в каждом тоне или поднесущей, назначенной для связи. В общем, перестановки являются циклическими или псевдослучайными. На этапе 940 уровни переставляются согласно шаблону перестановок P, и P переносится (к примеру, передается в широковещательном режиме пользователям в обслуживающей соте посредством обслуживающей базовой станции). На этапе 960 PSD определяется согласно числу 1≤NS≤NV запланированных потоков. В случае если режим SIMO запланирован для терминала NS=1 (проверка перестановки антенн (например, этап 920) приводит к недопустимому результату проверки), и PSD определяется посредством добавления мощности опорного сигнала, используемой для того, чтобы определять CQI (см. способ 800), и мощности обратной связи, возвращаемой вместе с индикатором канала. В случае если NS>1, каждому потоку назначается PSD на основе дифференциальной процедуры, посредством чего базовое значение добавляется к PSD, определенной для каждого потока (или переставленному, или подвергнутому другой операции). На этапе 970 скорость передачи данных определяется на основе запланированных потоков и их соответствующей PSD. Альтернативно, из нескольких зондирующих RS и взаимности FL/RL обнаружение с помощью последовательного подавления помех может иметь результатом оценку CQI для каждого из нескольких контрольных сигналов, и из каждого из этих значений PSD смещения может быть определена и добавлена к опорной PSD; это определяет PSD для каждого потока в случае NS>1. На этапе 980 терминал планируется в SIMO, SU-MIMO и MU-MIMO, и ассоциативно связанные ресурсы переносятся в терминал. Классические (к примеру, циклический алгоритм, справедливая организация очереди, пропорциональная равнодоступность и планирование максимальной производительности) и квантовые алгоритмы (к примеру, квантовый генетический алгоритм) могут использоваться для планирования. Следует отметить, что хотя вышеописанный способ 900 основан на перестановке антенн для планирования MIMO, другие типы адаптации/преобразований каналов, такие как предварительное кодирование, могут быть использованы для достижения совместного планирования в режиме SIMO/MIMO.
Фиг.10 представляет блок-схему способа 1000 для приема назначения ресурсов для работы в режиме SIMO, SU-MIMO или MU-MIMO. На этапе 1010 принимается скорость передачи данных для основного потока δBASE данных. Скорость передачи данных передается посредством фиксированного числа битов R, определенного посредством обслуживающей базовой станции (к примеру, 110), и переносится в канале управления (к примеру, PDCCH в LTE). В аспекте R соответствует возможным вариантам MCS, доступным для связи по восходящей линии связи, и такая доступность типично определяется в стандартных технических требованиях. Такая скорость передачи данных определяется посредством схемы модуляции и кодирования, которая может быть выделена терминалу, принимающему назначение. Размер созвездия и кодовая скорость зависят от характеристик канала; например, различные MSC, такие как BPSK, QPSK, 4-QAM и 16-QAM, представляют увеличение вероятности битовой ошибки как функцию от SNR при предоставлении возрастания скорости передачи данных. В аспекте прием скорости передачи данных для основного потока обеспечивает то, что терминалы, ограниченные режимом работы SIMO, к примеру, с одной антенной приемо-передающего устройства, могут работать совместно с терминалами с дополнительными антеннами.
На этапе 1020 проверяется число NS запланированных потоков данных. Положительный результат проверки показывает множество запланированных потоков данных, что указывает рабочий режим MIMO. На этапе 1040, чтобы работать с несколькими потоками данных в различных терминалах в различных режимах работы MIMO, принимается дельта скорости Δδ передачи данных; Q<R битов принимается в назначении. Последнее смещение обеспечивает возможность дифференциального определения скорости передачи данных потоков за счет использования лестничной схемы скоростей передачи данных: δJ+1 = δBASE + J×Δδ, при этом J=1,...,NS. На этапе 1050 принимается выбор поднабора антенн, назначение переносится с помощью P битов и указывает антенны, которые должны быть использованы при обмене данными по UL через несколько потоков данных. Поднабор антенн может быть физическим или виртуальным. На этапе 1060 принимается выбор диаграммы направленности антенны, указанный через S битов. Такая диаграмма направленности диктует электромагнитную взаимосвязь между физическими или виртуальными антеннами, используемыми для связи.
Далее поясняются примерные системы, которые могут обеспечить аспекты раскрываемого предмета изобретения, в связи с фиг.11 и 12. Такие системы могут включать в себя функциональные блоки, которые могут быть функциональными блоками, которые представляют функции, реализованные посредством процессора или электронной машины, программного обеспечения или комбинации вышеозначенного (к примеру, микропрограммного обеспечения).
Фиг.11 иллюстрирует блок-схему примерной системы, которая предоставляет управление мощностью и контрольными сигналами, а также прием назначения ресурсов связи согласно аспектам, раскрытым в настоящем подробном описании. Система 1100 может постоянно размещаться, по меньшей мере, частично в терминале доступа (к примеру, абонентского устройства 1701-1706 или терминала 220 доступа). Система 1100 включает в себя логическое группирование 1110 электронных компонентов, которые могут действовать совместно. В аспекте логическое группирование 1110 включает в себя электронный компонент 1115 для передачи, по меньшей мере, одного опорного сигнала управления мощностью из антенны, выбранной из группы, включающей в себя M виртуальных антенн или G физических антенн, при этом M и G являются положительными целыми числами; электронный компонент 1125 для переноса смещения спектральной плотности мощности (PSD) из антенны, используемой для того, чтобы сообщать, по меньшей мере, один опорный сигнал управления мощностью; и электронный компонент 1135 для передачи контрольного сигнала из каждой из антенн в группе из M виртуальных антенн или группе из G физических антенн. Помимо этого, система 1100 может включать в себя компонент 1145 для приема назначения скорости передачи данных; электронный компонент 1155 для приема назначения смещения скорости передачи данных, когда два или более потоков данных запланированы для передачи данных; электронный компонент 1165 для приема выбора поднабора антенн из группы из M виртуальных антенн или группы из G физических антенн; и электронный компонент 1175 для приема выбора диаграммы направленности антенны.
Система 1100 также может включать в себя запоминающее устройство 1180, которое сохраняет инструкции для выполнения функций, ассоциативно связанных с электрическими компонентами 1115, 1125, 1135, 1145, 1155, 1165 и 1175, а также измеренные и/или вычисленные данные, которые могут быть сформированы во время выполнения этих функций. Хотя показаны как являющиеся внешними к запоминающему устройству 1180, следует понимать, что один или более электронных компонентов 1115, 1125 и 1135, 1145, 1155, 1165 и 1175 могут существовать в рамках запоминающего устройства 1180.
Фиг.12 является блок-схемой системы, которая предоставляет планирование режимов работы SIMO, SU-MIMO или MU-MIMO, а также передачу назначения ресурсов связи согласно аспекту, изложенному в данном документе. Система 1200 может постоянно размещаться, по меньшей мере, частично, в базовой станции (к примеру, в точке 110 доступа или узле B 250). Система 1200 включает в себя логическое группирование 1210 электронных компонентов, которые могут действовать совместно. В аспекте логическое группирование 1210 включает в себя электронный компонент 1215 для оценки беспроводного канала режима с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO); электронный компонент 1225 для определения спектральной плотности мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; электронный компонент 1235 для определения скорости передачи данных для переноса данных в RL согласно набору запланированных потоков данных; и электронный компонент 1245 для планирования терминала в одном из режима SIMO, режима с однопользовательской MIMO или режима с многопользовательской MIMO.
Помимо этого, система 1200 может включать в себя электронный компонент 1255 для переноса назначения скорости передачи данных; электронный компонент 1265 для передачи смещения назначения скорости передачи данных; электронный компонент 1275 для передачи выбора поднабора антенн из набора из M физических антенн или набора из G виртуальных антенн; и электронный компонент 1285 для переноса выбора диаграммы направленности антенны.
Система 1200 также может включать в себя запоминающее устройство 1290, которое сохраняет инструкции для выполнения функций, ассоциативно связанных с электрическими компонентами 1215, 1225, 1235, 1245, 1255, 1265, 1275 и 1285, а также измеренные и/или вычисленные данные, которые могут быть сформированы во время выполнения этих функций. Хотя показаны как являющиеся внешними к запоминающему устройству 1290, следует понимать, что один или более электронных компонентов 1215, 1225, 1235, 1245, 1255, 1265, 1275 и 1285 могут существовать в рамках запоминающего устройства 1290.
При реализации в программном обеспечении описанные в данном документе способы могут быть реализованы с помощью модулей (к примеру, процедур, функций и т.п.), которые выполняют описанные в данном документе функции. Программные коды могут быть сохранены в запоминающем устройстве и приведены в исполнение посредством процессоров. Запоминающее устройство может быть реализовано в процессоре или внешне по отношению к процессору, причем во втором случае оно может быть функционально соединено с процессором с помощью различных средств, известных в данной области техники.
Различные аспекты или признаки, описанные в данном документе, могут быть реализованы как способ, устройство или изделие с помощью стандартных способов программирования и/или разработки. Термин "изделие" при использовании в данном документе имеет намерение содержать в себе компьютерную программу, доступную из любого машиночитаемого устройства, носителя или среды. Например, машиночитаемые носители могут включать в себя, но не только, магнитные устройства хранения (к примеру, жесткий диск, гибкий диск, магнитную ленту и т.д.), оптические диски (к примеру, компакт-диск (CD), универсальный цифровой диск (DVD) и т.д.), смарт-карты и устройства флэш-памяти (к примеру, EPROM, карточка, карта, флэш-диск и т.д.). Дополнительно, различные носители хранения, описанные в данном документе, могут представлять одно или более устройств и/или других машиночитаемых носителей для хранения информации. Термин "машиночитаемый носитель" может включать в себя, без ограничений, беспроводные каналы и различные другие носители, допускающие хранение, размещение и/или перенос команд(ы) и/или данных.
При использовании в данном документе термин "процессор" может упоминаться как классическая архитектура или квантовый компьютер. Классическая архитектура содержит, но не только, одноядерные процессоры; одноядерные процессоры с программной поддержкой многопоточного выполнения; многоядерные процессоры; многоядерные процессоры с программной поддержкой многопоточного выполнения; многоядерные процессоры с аппаратной технологией многопоточного выполнения; параллельные платформы; и параллельные платформы с распределенным совместно используемым запоминающим устройством. Дополнительно, процессор может упоминаться как интегральная схема, специализированная интегральная схема (ASIC), процессор цифровых сигналов (DSP), программируемая пользователем вентильная матрица (FPGA), контроллер с программируемой логикой (PLC), сложное устройство с программируемой логикой (CPLD), дискретный логический вентиль или транзисторная логика, дискретные аппаратные компоненты или любая комбинация вышеозначенного, предназначенная для того, чтобы выполнять функции, описанные в данном документе. Архитектура квантовых компьютеров может быть основана на квантовых битах, осуществленных в стробированных или самоассемблированных квантовых точках, ядерных магнитных резонансных платформах, сверхпроводящих джозефсоновских переходах и т.д. Процессоры могут использовать архитектуры в наномасштабе, такие как, но не только, молекулярные и основанные на квантовых точках транзисторы, коммутаторы и логические вентили, чтобы оптимизировать использование пространства или повышать производительность абонентского устройства. Процессор также может быть реализован как комбинация вычислительных устройств, к примеру сочетание DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Кроме того, в настоящем подробном описании термин "запоминающее устройство" упоминается как хранилища данных, хранилища алгоритмов и другие информационные хранилища, такие как, но не только, хранилище изображений, хранилище цифровой музыки и видео, карты и базы данных. Следует принимать во внимание, что компоненты запоминающего устройства, описанные в данном документе, могут быть энергозависимым запоминающим устройством или энергонезависимым запоминающим устройством либо могут включать в себя и энергозависимое, и энергонезависимое запоминающее устройство. В качестве иллюстрации, но не ограничения, энергонезависимое запоминающее устройство может включать в себя постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое ROM (EEPROM) или флэш-память. Энергозависимое запоминающее устройство может включать в себя оперативное запоминающее устройство (RAM), которое выступает в качестве внешнего кэша. В качестве иллюстрации, но не ограничения, RAM доступно во многих формах, например синхронное RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с двойной скоростью передачи данных (DDR SDRAM), улучшенное SDRAM (ESDRAM), Synchlink DRAM (SLDRAM) и direct Rambus RAM (DRRAM). Дополнительно, раскрытые компоненты запоминающего устройства систем и/или способов из данного документа имеют намерение содержать, без ограничения, эти и любые другие подходящие типы запоминающих устройств.
То, что описано выше, включает в себя примеры одного или более вариантов осуществления. Конечно, невозможно описать каждое вероятное сочетание компонентов или способов в целях описания вышеозначенных вариантов осуществления, но специалисты в данной области техники могут признавать, что многие дополнительные сочетания и перестановки различных вариантов осуществления допустимы. Следовательно, описанные варианты осуществления имеют намерение охватывать все подобные преобразования, модификации и разновидности, которые попадают под сущность и объем прилагаемой формулы изобретения. Более того, в пределах того как термин "включает в себя" используется в подробном описании или в формуле изобретения, этот термин должен быть включающим способом, аналогичным термину "содержит", как "содержит" интерпретируется, когда используется в качестве переходного слова в формуле изобретения.
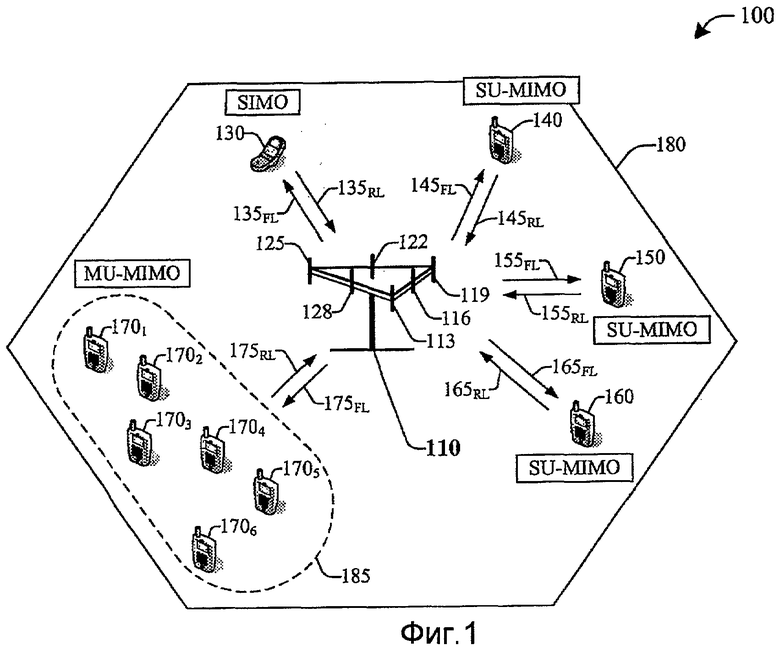
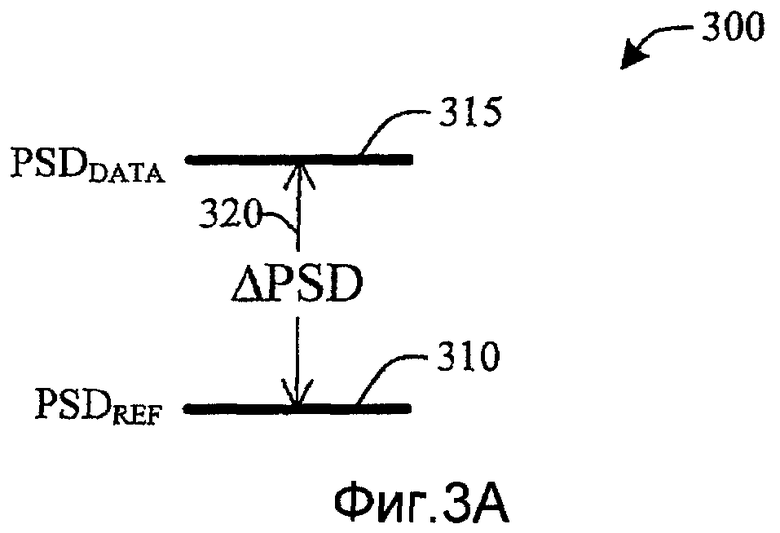
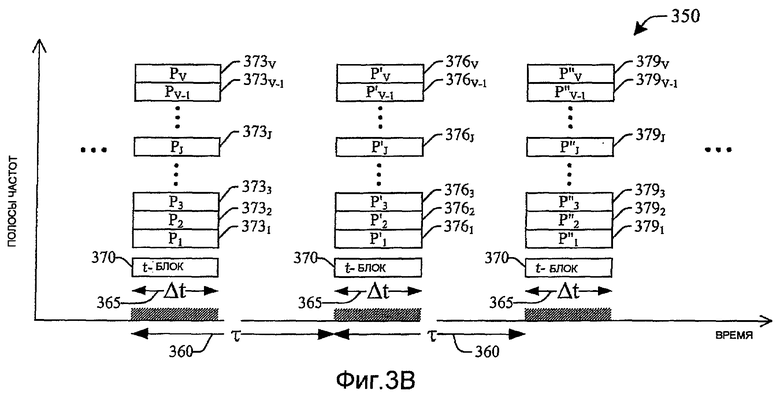
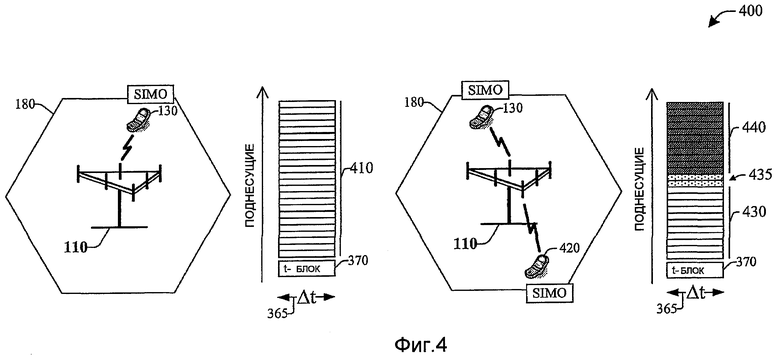
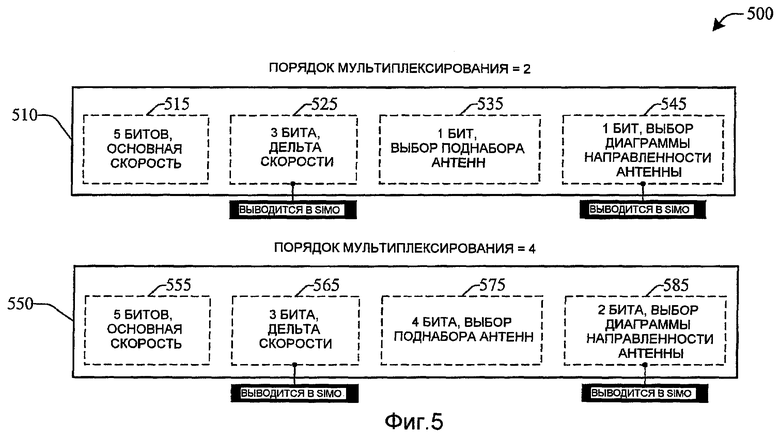
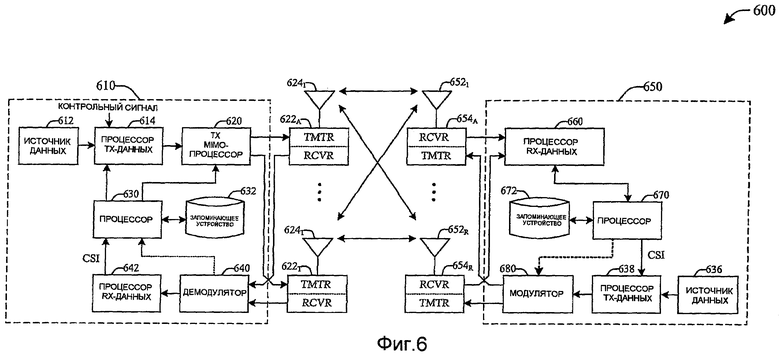
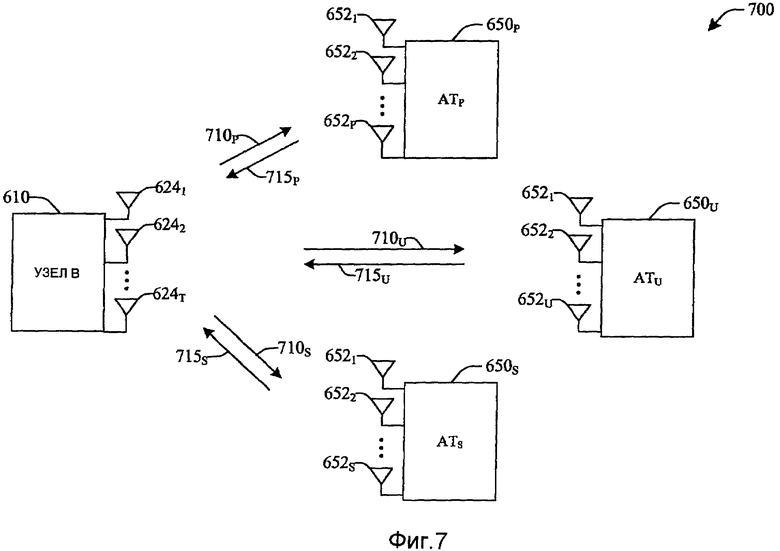
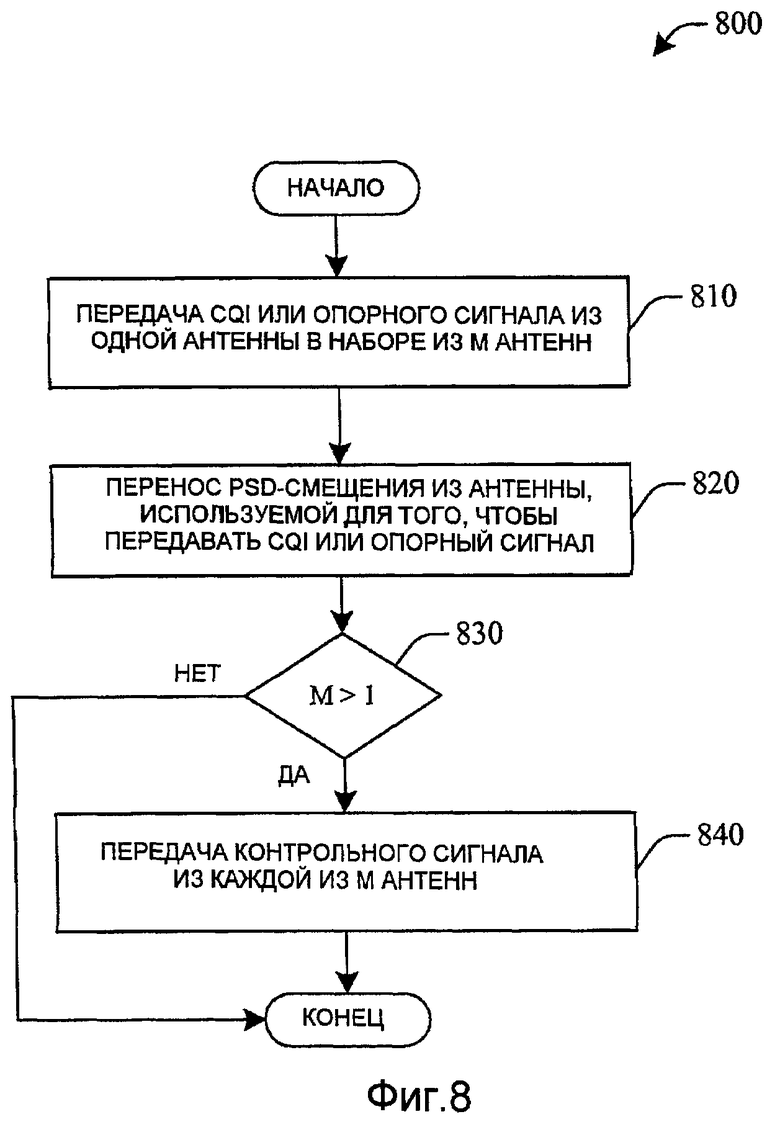
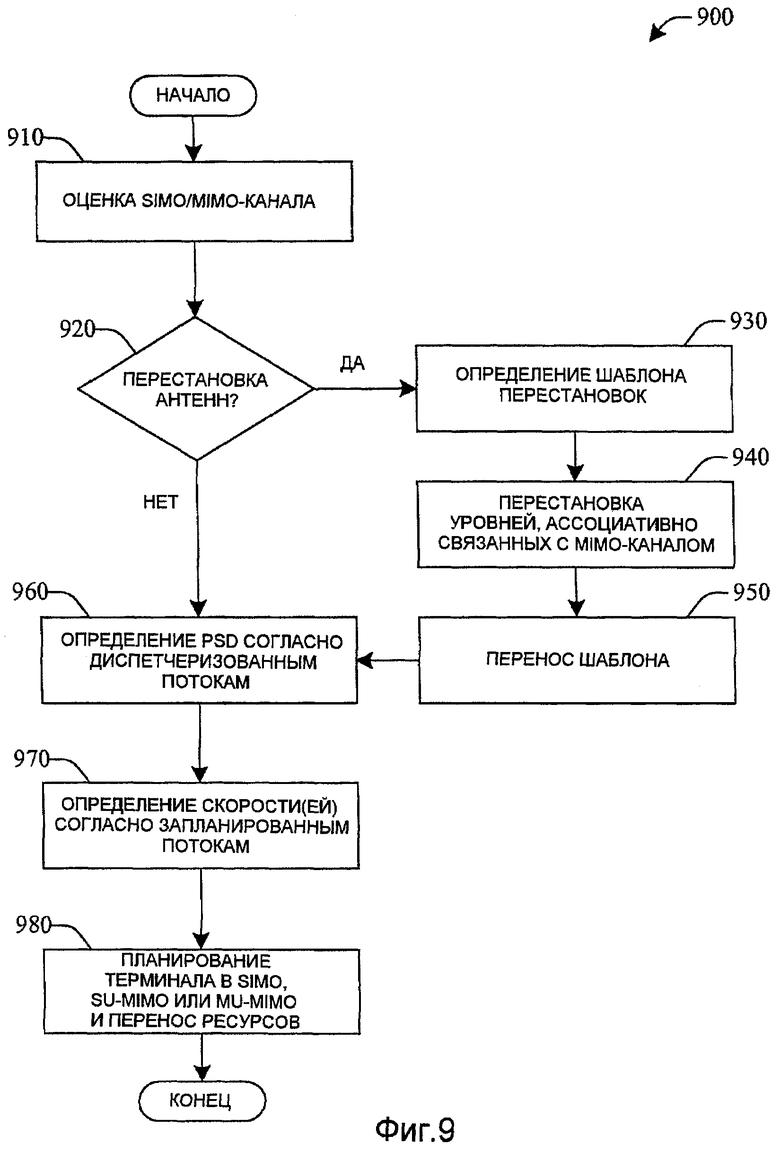
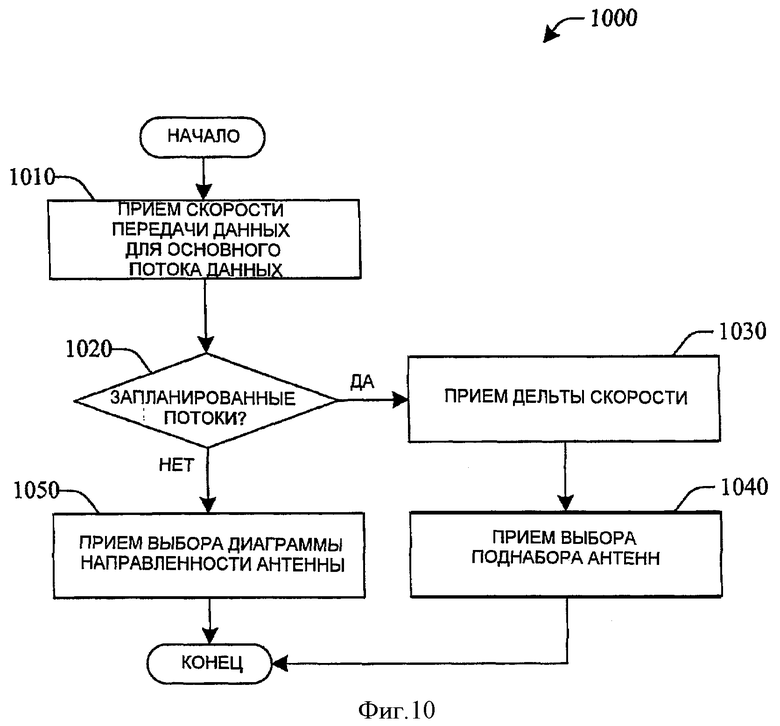
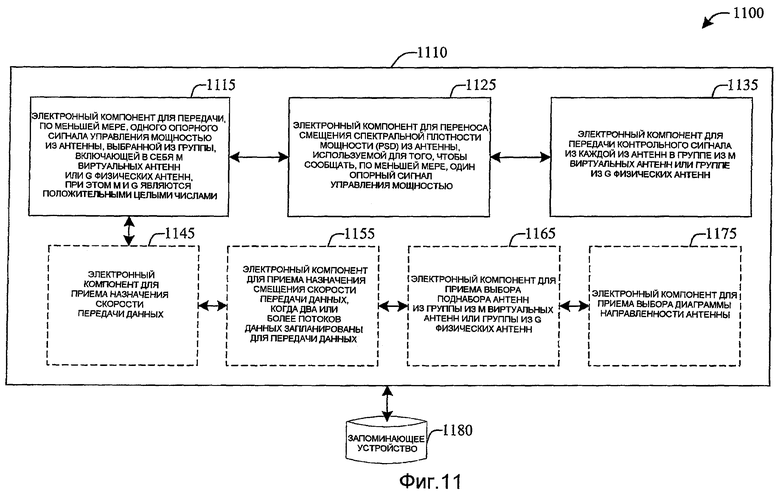
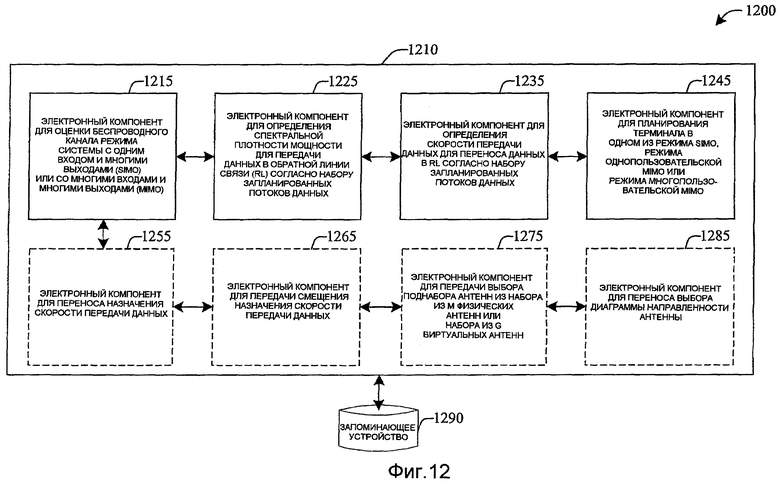
Системы и способы упрощают структуру контрольного сигнала, управление мощностью, определение скорости данных и назначение каналов в обратной линии связи системы беспроводной связи для динамического планирования и совместной работы в режимах с одним входом и многими выходами (SIMO), однопользовательской и многопользовательской системы с многими входами и многими выходами (SU-MIMO и MU-MIMO). Контрольный сигнал основан на периодических передачах нескольких зондирующих опорных последовательностей для оценки канала. Управление мощностью основано на опорном сигнале на заранее определенном уровне спектральной плотности мощности (PSD) и на PSD-смещении, определяемом и передаваемом в служебных сигналах на основе антенны, которая передает опорный сигнал, помехах от других сот и запасе мощности усилителя мощности. Уровни PSD для передач данных согласно SIMO/MIMO определяются на основе оценок канала и заранее определенной PSD и PSD-смещения и используются для формирования скорости передачи данных и динамического планирования потоков данных для связи. Ресурсы связи переносятся через назначение канала с помощью служебной информации, объем которой зависит от максимального порядка мультиплексирования оцененного канала. Техническим результатом является объединенное и централизованное, а также динамическое планирование передач SIMO, SU-MIMO и MU-MIMO. 8 н. и 62 з.п. ф-лы, 13 ил.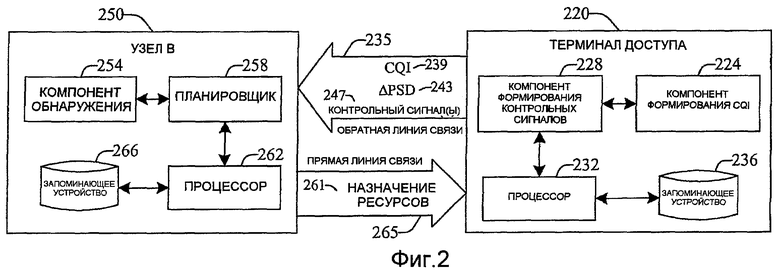
1. Способ беспроводной связи, используемый в системе беспроводной связи, при этом способ содержит этапы, на которых:
- передают, по меньшей мере, один опорный сигнал управления мощностью из антенны, выбранной из группы из М антенн, где М является положительным целым числом;
- передают смещение спектральной плотности мощности (PSD) из антенны, используемой для сообщения, по меньшей мере, одного опорного сигнала управления мощностью, при этом PSD-смещение основано на опорном уровне PSD для передачи, по меньшей мере, одного опорного сигнала управления мощностью; и
- передают контрольный сигнал из каждой антенны в наборе из М антенн для оценки канала системы со многими входами и многими выходами (MIMO), когда М>1, и канала с одним входом и многими выходами (SIMO), когда М=1.
2. Способ по п.1, в котором, по меньшей мере, один опорный сигнал управления мощностью включает в себя канал индикатора качества канала (CQI).
3. Способ по п.1, в котором передаваемый опорный сигнал является, по меньшей мере, одним из последовательности с постоянной амплитудой и нулевой автокорреляцией (CAZAC).
4. Способ по п.1, в котором PSD-смещение оценивается на основе индикатора нагрузки, ассоциированного с межсотовыми помехами.
5. Способ по п.1, в котором PSD-смещение табулировано согласно схеме модуляции и кодирования, назначенной мобильному терминалу.
6. Способ по п.1, в котором PSD-смещение регулирует мощность, которую базовая станция назначает мобильному терминалу для передачи данных в обратной линии связи.
7. Способ по п.1, дополнительно содержащий этап, на котором определяют, следует ли сообщать, по меньшей мере, один опорный сигнал управления мощностью из физической антенны или виртуальной антенны.
8. Способ по п.1, в котором группа из М антенн является набором физических антенн.
9. Способ по п.6, в котором PSD-смещение определяется, по меньшей мере, на основе запаса мощности усилителя мощности в физической антенне, выбранной для сообщения, по меньшей мере, одного опорного сигнала управления мощностью.
10. Способ по п.1, в котором группа из М антенн является набором виртуальных антенн.
11. Способ по п.7, в котором PSD-смещение определяется, по меньшей мере, на основе оставшегося запаса мощности усилителя мощности (РА) в физической антенне, доступной в наборе физических антенн, объединенных так, чтобы составить виртуальную антенну, используемую для сообщения, по меньшей мере, одного опорного сигнала управления мощностью.
12. Способ по п.1, в котором передача контрольного сигнала включает в себя передачу контрольного сигнала периодически.
13. Способ по п.1, в котором контрольный сигнал является, по меньшей мере, одним из последовательности с постоянной амплитудой и нулевой автокорреляцией (CAZAC).
14. Способ по п.1, в котором передаваемый контрольный сигнал является, по меньшей мере, одним из псевдослучайного кода или псевдошумовой последовательности.
15. Способ по п.1, в котором передаваемый контрольный сигнал является, по меньшей мере, одним из последовательности Голда, последовательности Уолша-Адамара, экспоненциальной последовательности, последовательности Голомба, последовательности Раиса, М-последовательности или обобщенной линейно-частотно-модулированной последовательности (GCL).
16. Способ по п.1, дополнительно содержащий этапы, на которых:
- принимают назначение скорости передачи данных;
- принимают назначение скорости передачи данных смещения, когда два или более потоков данных запланированы для передачи данных;
- принимают выбор поднабора антенн из набора из М антенн и
- принимают выбор диаграммы направленности антенны.
17. Способ по п.15, в котором скорость передачи данных передается посредством 5 битов.
18. Способ по п.15, в котором скорость передачи данных определяется схемой модуляции и кодирования.
19. Способ по п.15, в котором назначение скорости передачи данных смещения передается посредством 3 битов.
20. Способ по п.15, в котором выбор поднабора антенн передается с помощью Р битов, при этом Р битов определяются посредством максимального порядка (L) мультиплексирования, ассоциированного с каналом беспроводной связи, ассоциированным с набором из М антенн.
21. Способ по п.20, в котором Р равно 1 биту для L=2 и Р равно 4 битам для L=4.
22. Способ по п.15, в котором выбор диаграммы направленности антенны передается с помощью 1 бита для максимального порядка (L) мультиплексирования, равного двум, и с помощью 2 битов для L=4.
23. Устройство беспроводной связи, содержащее:
- процессор, конфигурированный для передачи опорного сигнала управления мощностью из антенны, выбранной из набора виртуальных антенн или физических антенн; для передачи значения спектральной плотности мощности (PSD) из выбранной антенны, при этом PSD-значение определяется посредством опорной PSD, используемой для сообщения опорного сигнала управления мощностью; для периодической передачи зондирующего опорного сигнала из каждой из антенн в наборе виртуальных антенн или физических антенн; и
- запоминающее устройство, соединенное с процессором.
24. Устройство беспроводной связи по п.23, в котором передаваемый зондирующий опорный сигнал является, по меньшей мере, одним из последовательности Голда, последовательности Уолша-Адамара, экспоненциальной последовательности, последовательности Голомба, последовательности Раиса, М-последовательности или обобщенной линейно-частотно-модулированной последовательности (GCL).
25. Устройство беспроводной связи по п.23, в котором передаваемый зондирующий опорный сигнал является, по меньшей мере, одним из последовательности CAZAC или последовательности Задова-Чу.
26. Устройство беспроводной связи по п.23, в котором процессор дополнительно конфигурирован для передачи зондирующих опорных сигналов на смежных частотных ресурсах.
27. Устройство беспроводной связи по п.26, в котором частотные ресурсы являются конкретными подполосами частот, которые переносят зондирующий опорный сигнал физической или виртуальной антенны.
28. Устройство беспроводной связи по п.23, в котором процессор дополнительно конфигурирован для передачи зондирующих опорных сигналов на перемежающихся частотных ресурсах.
29. Устройство беспроводной связи по п.23, в котором зондирующий опорный сигнал охватывает один или более блоков, по меньшей мере, в одном из суперкадра или радиокадра.
30. Устройство беспроводной связи по п.23, в котором процессор дополнительно конфигурирован для регулирования периода периодически передаваемого зондирующего опорного сигнала в ответ на сообщаемый CQI.
31. Устройство беспроводной связи по п.23, в котором значение PSD определяет PSD, которую базовая станция назначает терминалу доступа для передачи данных в обратной линии связи.
32. Устройство беспроводной связи по п.23, в котором процессор дополнительно конфигурирован для приема назначения скорости передачи данных, для приема назначения скорости передачи данных смещения, для приема выбора поднабора антенн из набора виртуальных антенн или физических антенн и для приема выбора диаграммы направленности антенны.
33. Устройство беспроводной связи по п.32, в котором назначение скорости передачи данных переносится посредством 5 битов и назначение скорости передачи данных смещения переносится посредством 3 битов.
34. Устройство беспроводной связи по п.32, в котором выбор поднабора антенн переносится посредством Р битов, при этом Р битов определяются порядком (L) пространственного мультиплексирования, ассоциированного с набором виртуальных антенн или физических антенн.
35. Устройство беспроводной связи по п.34, в котором Р равно 1 биту для L=2 и Р равно 4 битам для L=4.
36. Устройство беспроводной связи по п.34, в котором выбор диаграммы направленности антенны переносится посредством 1 бита для максимального порядка (L) мультиплексирования, равного двум, и посредством 2 битов для L=4.
37. Устройство беспроводной связи, которое работает в среде беспроводной связи, содержащее:
- средство передачи, по меньшей мере, одного опорного сигнала управления мощностью из антенны, выбранной из группы, включающей в себя М виртуальных антенн или G физических антенн, при этом М и G являются положительными целыми числами;
- средство передачи смещения спектральной плотности мощности (PSD) из антенны, используемой для сообщения, по меньшей мере, одного опорного сигнала управления мощностью и
- средство передачи контрольного сигнала из каждой из антенн в группе из М виртуальных антенн или группе из G физических антенн.
38. Устройство по п.39, дополнительно содержащее:
- средство приема назначения скорости передачи данных;
- средство приема назначения скорости передачи данных смещения, когда два или более потоков данных запланированы для передачи данных;
- средство приема выбора поднабора антенн из группы из М виртуальных антенн или группы из G физических антенн и
- средство приема выбора диаграммы направленности антенны.
39. Машиночитаемый носитель, содержащий сохраненную на нем информацию, содержащую коды для осуществления способа беспроводной связи по п.1, при этом коды включают в себя
- код для побуждения, по меньшей мере, одного компьютера передавать, по меньшей мере, один опорный сигнал управления мощностью из антенны, выбранной из группы из М антенн, где М является положительным целым числом;
- код для побуждения, по меньшей мере, одного компьютера передавать смещение спектральной плотности мощности (PSD) из антенны, используемой для сообщения, по меньшей мере, одного опорного сигнала управления мощностью, при этом PSD-смещение основано, по меньшей мере, на опорном уровне PSD для передачи, по меньшей мере, одного опорного сигнала управления мощностью; и
- код для побуждения, по меньшей мере, одного компьютера передавать контрольный сигнал из каждой антенны в наборе из М антенн.
40. Машиночитаемый носитель по п.39, в котором упомянутые коды дополнительно включают в себя:
- код для побуждения, по меньшей мере, одного компьютера принимать назначение скорости передачи данных;
- код для побуждения, по меньшей мере, одного компьютера принимать назначение скорости передачи данных смещения, когда два или более потоков данных запланированы для передачи данных;
- код для побуждения, по меньшей мере, одного компьютера принимать выбор поднабора антенн из набора из М антенн и
- код для побуждения, по меньшей мере, одного компьютера принимать выбор диаграммы направленности антенны.
41. Способ беспроводной связи, используемый в системе беспроводной связи, содержащий этапы, на которых:
- оценивают канал с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO), по меньшей мере, частично на основе приема набора контрольных сигналов, передаваемых посредством М антенн;
- определяют спектральную плотность мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных;
- определяют скорость передачи данных для передачи данных в RL согласно набору запланированных потоков данных и
- планируют терминал доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO.
42. Способ по п.41, дополнительно содержащий этапы, на которых:
- передают назначение скорости передачи данных;
- передают назначение скорости передачи данных смещения, когда два или более потоков данных запланированы для передачи данных;
- передают выбор поднабора антенн из набора из М физических антенн или набора из G виртуальных антенн и
- передают выбор диаграммы направленности антенны, когда терминал доступа запланирован в режиме однопользовательского MIMO или многопользовательского MIMO.
43. Способ по п.42, в котором передача назначения скорости передачи данных включает в себя передачу 5 битов в канале назначения.
44. Способ по п.42, в котором передача назначения скорости передачи данных смещения включает в себя передачу 3 битов.
45. Способ по п.42, в котором передача выбора поднабора антенн включает в себя передачу Р битов, при этом Р битов определяются порядком (L) пространственного мультиплексирования, ассоциированного с набором из М физических антенн или набором из G виртуальных антенн.
46. Способ по п.45, в котором Р равно 1 биту для L=2 и Р равно 4 битам для L=4.
47. Способ по п.42, в котором передача выбора диаграммы направленности антенны включает в себя передачу 1 бита для максимального порядка (L') мультиплексирования, равного двум, и передачу 2 битов для L'=4.
48. Способ по п.41, дополнительно содержащий этапы, на которых:
- определяют, что перестановка антенн должна быть применена к набору потоков данных;
- определяют шаблон перестановок и переставляют набор уровней данных, ассоциированных с MIMO-каналом; и
- передают шаблон перестановок.
49. Способ по п.41, в котором прием набора контрольных сигналов, передаваемых посредством М антенн, включает в себя прием набора контрольных сигналов периодически.
50. Способ по п.41, в котором член набора контрольных сигналов является, по меньшей мере, одним из последовательности Голда, последовательности Уолша-Адамара, экспоненциальной последовательности, последовательности Голомба, последовательности Раиса, М-последовательности или обобщенной линейно-частотно-модулированной последовательности (GCL).
51. Способ по п.41, в котором член набора контрольных сигналов является, по меньшей мере, одним из последовательности CAZAC или последовательности Задова-Чу.
52. Способ по п.41, в котором определение спектральной плотности мощности для передачи данных в обратной линии связи согласно набору запланированных потоков данных включает в себя этапы, на которых:
- принимают опорный сигнал управления мощностью для одного потока;
- принимают смещение спектральной плотности мощности (PSD) для одного потока, ассоциированного с приемом опорного сигнала управления мощностью;
- определяют основную PSD для передачи данных в RL, при этом основная PSD получается из суммирования опорной PSD и принимаемого PSD-смещения; и
- регулируют основную PSD согласно регулированию соотношения пиковой к средней PSD и корректировке дифференциала пути для MIMO-канала для определения PSD для каждого из потоков данных.
53. Способ по п.41, в котором определение скорости передачи данных для передачи данных в RL согласно набору запланированных потоков данных включает в себя выполнение вычисления скорости для каждого потока данных с использованием корректора минимальной среднеквадратической ошибки с приемником последовательного подавления помех.
54. Способ по п.41, в котором планирование терминала доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO включает в себя назначение ресурсов связи, чтобы максимизировать, по меньшей мере, одно из производительности сектора или пропускной способности сектора.
55. Способ по п.41, в котором планирование терминала доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO включает в себя назначение ресурсов связи так, чтобы поддерживать, по меньшей мере, одно из заранее определенной частоты ошибок в битах, заранее определенного времени задержки или заранее определенной спектральной эффективности.
56. Способ по п.48, в котором определение шаблона перестановок включает в себя определение унитарной матрицы Р, которая применяет циклическую перестановку или псевдослучайную перестановку.
57. Устройство беспроводной связи, которое работает в системе беспроводной связи, содержащее:
- средство оценки беспроводного канала с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO);
- средство определения спектральной плотности мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных;
- средство определения скорости передачи данных для передачи данных в RL согласно набору запланированных потоков данных и
- средство планирования терминала в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO.
58. Устройство по п.57, дополнительно содержащее:
- средство передачи назначения скорости передачи данных;
- средство передачи назначения скорости передачи данных смещения;
- средство передачи выбора поднабора антенн из набора из М физических антенн или набора из G виртуальных антенн и
- средство передачи выбора диаграммы направленности антенны.
59. Устройство беспроводной связи, содержащее:
- процессор, конфигурированный для оценивания канала с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO); определения спектральной плотности мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных; определения скорости передачи данных для переноса данных в RL согласно набору запланированных потоков данных и планирования терминала доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO; и
- запоминающее устройство, соединенное с процессором.
60. Устройство беспроводной связи по п.59, в котором процессор дополнительно конфигурирован для передачи назначения скорости передачи данных, для передачи назначения скорости передачи данных смещения, передачи выбора поднабора антенн из набора из М физических антенн или набора из G виртуальных антенн и передачи выбора диаграммы направленности антенны, когда терминал запланирован в однопользовательском MIMO или многопользовательском MIMO.
61. Устройство беспроводной связи по п.60, в котором передача назначения скорости передачи данных включает в себя передачу 5 битов в канале назначения.
62. Устройство беспроводной связи по п.60, в котором передача назначения скорости передачи данных смещения включает в себя передачу 3 битов в канале назначения.
63. Устройство беспроводной связи по п.60, в котором передача выбора поднабора антенн включает в себя передачу Р битов, при этом Р битов определяются посредством порядка (L) пространственного мультиплексирования, ассоциированного с набором из М физических антенн или набором из G виртуальных антенн, при этом Р=1 для L=2 и Р=4 для L=4.
64. Устройство беспроводной связи по п.60, в котором передача выбора диаграммы направленности антенны включает в себя передачу 1 бита для максимального порядка (L') мультиплексирования, равного двум, и передачу 2 битов для L'=4.
65. Устройство беспроводной связи по п.59, в котором процессор дополнительно конфигурирован для приема опорного сигнала управления мощностью для одного потока передачи, для приема смещения спектральной плотности мощности (PSD) для одного потока, ассоциированного с опорным сигналом управления мощностью, определения основной PSD для передачи данных в RL, при этом основная PSD получается из суммирования опорной PSD и принимаемого PSD-смещения, и регулирования основной PSD согласно регулированию соотношения пиковой к средней PSD и корректировке дифференциала пути для MIMO-канала для определения PSD для каждого из потоков данных.
66. Устройство беспроводной связи по п.65, в котором сигнал управления мощностью является каналом CQI.
67. Устройство беспроводной связи по п.65, в котором содержимое канала CQI модулируется последовательностью с постоянной амплитудой и нулевой автокорреляцией (CAZAC).
68. Устройство беспроводной связи по п.59, в котором планирование терминала доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO включает в себя оптимизацию, по меньшей мере, одного из производительности сектора или пропускной способности сектора.
69. Устройство беспроводной связи по п.59, в котором планирование терминала доступа в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO включает в себя назначение ресурсов связи так, чтобы поддерживать, по меньшей мере, одно из заранее определенной частоты ошибок в битах, заранее определенного времени задержки или заранее определенной спектральной эффективности.
70. Машиночитаемый носитель, содержащий сохраненную на нем информацию, содержащую коды для осуществления способа беспроводной связи по п.41, при этом коды включают в себя
- код для побуждения, по меньшей мере, одного компьютера оценивать канал с одним входом и многими выходами (SIMO) или со многими входами и многими выходами (MIMO);
- код для побуждения, по меньшей мере, одного компьютера определять спектральную плотность мощности для передачи данных в обратной линии связи (RL) согласно набору запланированных потоков данных;
- код для побуждения, по меньшей мере, одного компьютера определять скорость передачи данных для переноса данных в RL согласно набору запланированных потоков данных и
- код для побуждения, по меньшей мере, одного компьютера планировать терминал в одном из режима SIMO, режима однопользовательского MIMO или режима многопользовательского MIMO.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ВО ВРЕМЯ ГИБКОГО ПЕРЕКЛЮЧЕНИЯ КАНАЛОВ СВЯЗИ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 2002 |
|
RU2237975C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

