Изобретение относится к робототехнике и может быть использовано при создании электроприводов роботов.
Известен самонастраивающийся электропривод робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с шестерней, приводящей в движение рейку, закрепленную неподвижно на третьем телескопическом звене робота, и движок первого датчика положения, установленного на втором звене и имеющего возможность измерения положения третьего телескопического звена относительно оси вращения второго звена, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и второму входу первого сумматора, последовательно соединенные первый задатчик сигнала, четвертый сумматор, пятый сумматор, к второму входу которого подключен второй задатчик сигнала, второй блок умножения, шестой сумматор и третий блок умножения, а также датчик массы, причем выход первого датчика положения соединен с первым входом седьмого сумматора, подключенного вторым входом к входу устройства, а выходом - к первому входу первого сумматора, причем выход третьего сумматора соединен с вторым входом второго сумматора, последовательно соединенные второй датчик скорости и первый квадратор, выход которого соединен со вторым входом третьего блока умножения, выходом подключенного к третьему входу третьего сумматора, последовательно соединенные третий датчик скорости, четвертый блок умножения, второй квадратор и пятый блок умножения, второй вход которого подключен к выходу шестого сумматора, а выход - к четвертому входу третьего сумматора, последовательно соединенные второй датчик положения, первый функциональный преобразователь, шестой блок умножения и восьмой сумматор, второй вход которого подключен к выходу первого функционального преобразователя, а выход - к пятому входу третьего сумматора, причем выход датчика массы соединен с вторыми входами первого, второго и шестого блоков умножения, второй вход четвертого блока умножения через второй функциональный преобразователь подключен к выходу второго датчика положения, выход первого датчика положения соединен с вторым входом четвертого сумматора, выход которого подключен к второму входу шестого сумматора, а выход первого сумматора соединен с третьим входом второго сумматора (см. изобретение СССР №1798179, БИ №8, 1993 г.).
Недостатком этого электропривода является то, что он предназначен для управления другой степенью подвижности исполнительного органа робота с другой кинематической схемой, поэтому в нем будет отсутствовать полная инвариантность его динамических свойств к непрерывным изменениям моментных нагрузочных характеристик, если его установить в рассматриваемую степень подвижности исполнительного органа робота с рассматриваемой кинематической схемой.
Известно также устройство для управления приводом робота, содержащее первый сумматор, последовательно соединенные первый блок умножения и второй сумматор, последовательно соединенные первый усилитель, электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен со входом устройства, последовательно соединенные второй датчик положения, третий сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, первый квадратор, четвертый сумматор, второй вход которого соединен с выходом второго задатчика постоянного сигнала, пятый сумматор, второй вход которого подключен к выходу третьего задатчика постоянного сигнала, второй блок умножения и шестой сумматор, последовательно соединенные третий датчик положения, второй усилитель, первый функциональный преобразователь и третий блок умножения, второй вход которого подключен к выходу второго датчика скорости, а выход - к второму входу второго блока умножения, последовательно соединенные второй функциональный преобразователь, вход которого подключен к входу второго усилителя, второй квадратор, четвертый блок умножения, второй вход которого соединен с выходом четвертого сумматора, и седьмой сумматор, второй вход которого подключен к выходу четвертого задатчика постоянного сигнала, его третий вход через последовательно соединенные третий функциональный преобразователь и третий квадратор - к входу второго усилителя, последовательно соединенные пятый задатчик постоянного сигнала, восьмой сумматор, второй вход которого подключен к выходу третьего сумматора и первому входу девятого сумматора, пятый блок умножения, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого подключен в выходу восьмого сумматора, а выход - к третьему входу четвертого сумматора, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго квадратора, его второй вход - к выходу девятого сумматора, вторым входом подключенного к выходу пятого блока умножения, и восьмой блок умножения, второй вход которого соединен с выходом третьего датчика скорости, а выход - с вторым входом шестого сумматора, а также девятый блок умножения, выход которого подключен к четвертому входу второго сумматора, десятый сумматор и релейный элемент, выход которого подключен к второму входу второго сумматора, а вход - к выходу первого датчика скорости, третьему входу второго сумматора и первому входу девятого блока умножения, второй вход которого подключен к выходу шестого сумматора, причем первый вход десятого сумматора подключен к выходу первого сумматора, его второй вход - к выходу первого датчика скорости, а выход - к первому входу первого блока умножения, второй вход которого подключен к выходу седьмого сумматора, а выход второго сумматора соединен с входом первого усилителя (см. патент России №2028931, БИ №5, 1995 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению.
Недостатком этого устройства также является то, что оно предназначено для управления другой степенью подвижности исполнительного органа робота с другой кинематической схемой, поэтому в нем также будет отсутствовать полная инвариантность динамических свойств к непрерывным изменениям моментных нагрузочных характеристик, если его установить в рассматриваемую степень подвижности исполнительного органа робота с рассматриваемой кинематической схемой.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств электропривода, установленного в рассматриваемую степень подвижности исполнительного органа робота с рассматриваемой кинематической схемой, к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении этого исполнительного органа одновременно во всех его степенях подвижности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает создание моментного воздействия, необходимого для обеспечения полной инвариантности его показателей качества к непрерывно изменяющимся параметрам нагрузки.
Поставленная задача решается тем, что в электропривод робота, содержащий последовательно соединенные первый и второй сумматоры, первый блок умножения, третий сумматор, усилитель, электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен со входом устройства, последовательно соединенные второй датчик положения, четвертый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, пятый сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, второй блок умножения, второй вход которого подключен к выходу датчика массы, шестой сумматор и третий блок умножения, последовательно соединенные третий датчик положения и первый косинусный функциональный преобразователь, последовательно соединенные второй датчик скорости, четвертый и пятый блоки умножения, седьмой сумматор, второй вход которого подключен к выходу шестого блока умножения, и седьмой блок умножения, последовательно соединенные третий задатчик постоянного сигнала и восьмой сумматор, последовательно соединенные четвертый задатчик постоянного сигнала и девятый сумматор, релейный элемент, вход которого подключен к выходу первого датчика скорости и вторым входам второго и третьего сумматоров, а выход - к третьему входу третьего сумматора, а также пятый задатчик постоянного сигнала, третий датчик скорости и второй синусный функциональный преобразователь, вход которого подключен к выходу третьего датчика положения, дополнительно вводятся последовательно соединенные первый датчик ускорения, восьмой блок умножения, второй вход которого подключен к выходу первого функционального преобразователя и второму входу четвертого блока умножения, десятый сумматор, второй вход которого через последовательно соединенные квадратор и девятый блок умножения подключен к выходу третьего датчика скорости и второму входу пятого блока умножения, а выход - ко второму входу третьего блока умножения, выход которого соединен с четвертым входом третьего сумматора, а также одиннадцатый сумматор, первый и второй входы которого соединены с выходами восьмого сумматора и пятого задатчика постоянного сигнала, а выход - с пятым входом третьего сумматора и вторым входом девятого сумматора, выход которого подключен ко второму входу первого блока умножения, второй датчик ускорения, выход которого соединен с первым входом шестого блока умножения, второй вход которого подключен к выходу второго функционального преобразователя и второму входу девятого блока умножения, и десятый блок умножения, первый и второй входы которого подключены к выходам четвертого сумматора и третьего задатчика постоянного сигнала, а выход - ко второму входу шестого сумматора, причем шестой вход третьего сумматора соединен с выходом седьмого блока умножения, второй вход которого подключен к выходу восьмого сумматора, второй вход которого подключен к выходу датчика массы.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают высокую точность и устойчивость работы электропривода робота в условиях существенного изменения его параметров нагрузки.
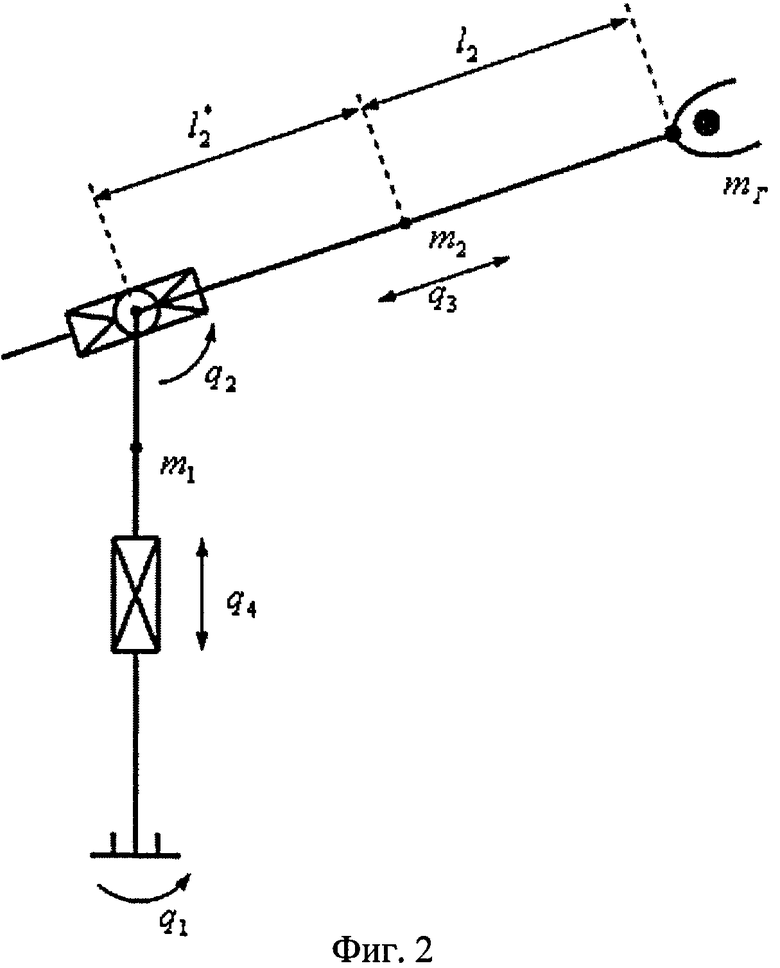
На фиг.1 дана блок-схема предлагаемого электропривода робота, а на фиг.2 - кинематическая схема исполнительного органа этого робота. На этих фигурах введены следующие обозначения: αВХ - сигнал желаемого положения; q1, q2, q3, q4 - соответствующие обобщенные координаты исполнительного органа робота;  ,
,  ,
,  - скорости изменения соответствующих обобщенных координат;
- скорости изменения соответствующих обобщенных координат;  - скорость вращения ротора электродвигателя; iР - передаточное отношение редуктора;
- скорость вращения ротора электродвигателя; iР - передаточное отношение редуктора;  - ускорение в четвертой обобщенной координате; ε - ошибка электропривода (величина рассогласования); m1, m2, mГ - соответственно массы первого, второго звеньев исполнительного органа и захваченного груза;
- ускорение в четвертой обобщенной координате; ε - ошибка электропривода (величина рассогласования); m1, m2, mГ - соответственно массы первого, второго звеньев исполнительного органа и захваченного груза;  - расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки охвата; U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем 5.
- расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки охвата; U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем 5.
Электропривод робота содержит последовательно соединенные первый 1 и второй 2 сумматоры, первый блок 3 умножения, третий сумматор 4, усилитель 5, электродвигатель 6, связанный непосредственно с первым датчиком 7 скорости и через редуктор 8 - с первым датчиком 9 положения, выход которого подключен к первому входу первого сумматора 1, второй вход которого соединен со входом устройства, последовательно соединенные второй датчик 10 положения, четвертый сумматор 11, второй вход которого подключен к выходу первого задатчика 12 постоянного сигнала, пятый сумматор 13, второй вход которого подключен к выходу второго задатчика 14 постоянного сигнала, второй блок 15 умножения, второй вход которого подключен к выходу датчика 16 массы, шестой сумматор 17 и третий блок 18 умножения, последовательно соединенные третий датчик 19 положения и первый косинусный функциональный преобразователь 20, последовательно соединенные второй датчик 21 скорости, четвертый 22 и пятый 23 блоки умножения, седьмой сумматор 24, второй вход которого подключен к выходу шестого блока 25 умножения, и седьмой блок 26 умножения, последовательно соединенные третий задатчик 27 постоянного сигнала и восьмой сумматор 28, последовательно соединенные четвертый задатчик 29 постоянного сигнала и девятый сумматор 30, релейный элемент 31, вход которого подключен к выходу первого датчика 7 скорости и вторым входам второго 2 и третьего 4 сумматоров, а выход - к третьему входу третьего сумматора, а также пятый задатчик 32 постоянного сигнала, третий датчик 33 скорости и второй синусный функциональный преобразователь 34, вход которого подключен к выходу третьего датчика 19 положения, последовательно соединенные первый датчик 35 ускорения, восьмой блок 36 умножения, второй вход которого подключен к выходу первого функционального преобразователя 20 и второму входу четвертого 22 блока умножения, десятый сумматор 37, второй вход которого через последовательно соединенные квадратор 38 и девятый блок 39 умножения подключен к выходу третьего датчика 33 скорости и второму входу пятого 23 блока умножения, а выход - ко второму входу третьего блока 18 умножения, выход которого соединен с четвертым входом третьего 4 сумматора, а также одиннадцатый сумматор 40, первый и второй входы которого соединены с выходами восьмого сумматора 28 и пятого задатчика 32 постоянного сигнала, а выход - с пятым входом третьего 4 сумматора и вторым входом девятого сумматора 30, выход которого подключен ко второму входу первого блока 3 умножения, второй датчик 41 ускорения, выход которого соединен с первым входом шестого блока 25 умножения, второй вход которого подключен к выходу второго функционального преобразователя 34 и второму входу девятого блока 39 умножения, и десятый блок 42 умножения, первый и второй входы которого подключены к выходам четвертого сумматора 11 и третьего задатчика 27 постоянного сигнала, а выход - ко второму входу шестого сумматора 17, причем шестой вход третьего сумматора 4 соединен с выходом седьмого блока 26 умножения, второй вход которого подключен к выходу восьмого сумматора 28, второй вход которого подключен к выходу датчика 16 массы, а выход редуктора 8 соединен с шестерней 43.
Устройство работает следующим образом. Сигнал ошибки ε после коррекции в блоках 1, 2, 3, 4, усиливаясь, поступает на электродвигатель 6, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала U, моментов трения и внешнего моментного воздействия МВ. Электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности исполнительного органа обладает переменными моментными характеристиками, которые могут меняться в широких пределах. Это снижает качественные показатели работы электропривода и даже приводит к потере устойчивости его работы. В результате возникает задача, связанная с обеспечением инвариантности динамических свойств электропривода к непрерывным и быстрым изменениям его моментных нагрузочных характеристик, что позволяет обеспечить стабильность заданного качества системы управления.
Моментные характеристики привода, управляющего координатой q4, существенно зависят от изменения координат q2, q3,  ,
,  ,
,  ,
,  и груза mГ. В связи с этим для качественного управления координатой q4 необходимо точно компенсировать отрицательное влияние изменения этих координат, а также переменной массы груза mГ на динамические свойства рассматриваемого привода (координата q4).
и груза mГ. В связи с этим для качественного управления координатой q4 необходимо точно компенсировать отрицательное влияние изменения этих координат, а также переменной массы груза mГ на динамические свойства рассматриваемого привода (координата q4).
Манипулятор в вертикальной плоскости перемещается с помощью рассматриваемого электропривода посредством передачи шестерня 43 - рейка (координата q4). Причем рейка установлена на первом вертикальном звене, а шестерня 43 имеет радиус r.
С помощью уравнений Лагранжа второго рода несложно показать, что в процессе движения исполнительного органа робота на его линейную вертикальную степень подвижности действует сила

(g - ускорение свободного падения), которая в процессе движения этого исполнительного органа создает на выходном валу редуктора 8 момент, равный

С учетом соотношения (1), а также уравнений электрической  и механической
и механической  цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый привод, управляющий координатой q4, можно описать следующим дифференциальным уравнением
цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения рассматриваемый привод, управляющий координатой q4, можно описать следующим дифференциальным уравнением

где  ;
;

R - активное сопротивление якорной цепи двигателя 6; J - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенный к валу электродвигателя; KM - коэффициент крутящего момента; kω - коэффициент противо-ЭДС; kB - коэффициент вязкого трения; ip - передаточное отношение редуктора; Mстр - момент сухого трения; ky - коэффициент усиления усилителя 5; i - ток якоря электродвигателя 6.
Из выражения (2) видно, что его параметры, а следовательно, параметры и динамические свойства электропривода, управляющего координатой q4, являются существенно переменными, зависящими от q2, q3, , , , и mГ. В результате для реализации поставленной выше задачи необходимо сформировать такое корректирующее устройство, которое стабилизировало бы параметры электропривода, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Первый положительный вход сумматора 2 имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления kω/ky. В результате на выходе сумматора 2 формируется сигнал  .
.
Датчики 19 и 10 установлены соответственно во второй и третьей степенях подвижности исполнительного органа робота и измеряют обобщенные координаты q2 и q3 соответственно. Датчики 33 и 21 установлены во второй и третьей степенях его подвижности и измеряют скорости  и
и  соответственно. Датчики 35 и 41 установлены соответственно во второй и третьей степенях подвижности этого исполнительного органа и измеряют ускорения
соответственно. Датчики 35 и 41 установлены соответственно во второй и третьей степенях подвижности этого исполнительного органа и измеряют ускорения  и
и  соответственно. В результате на выходе блока 22 формируется сигнал
соответственно. В результате на выходе блока 22 формируется сигнал  на выходе блока 23 - сигнал
на выходе блока 23 - сигнал  , на выходе блока 39 - сигнал
, на выходе блока 39 - сигнал  , на выходе блока 36 - сигнал
, на выходе блока 36 - сигнал  , а на выходе блока 25 - сигнал
, а на выходе блока 25 - сигнал  .
.
Задатчики 12 и 14 формируют сигналы  и l2 соответственно. Положительные входы сумматоров 11 и 13 имеют единичные коэффициенты усиления. В результате на выходе сумматора 11 формируется сигнал
и l2 соответственно. Положительные входы сумматоров 11 и 13 имеют единичные коэффициенты усиления. В результате на выходе сумматора 11 формируется сигнал  , а на выходе сумматора 14 - сигнал
, а на выходе сумматора 14 - сигнал  . Задатчики 29, 27 и 32 формируют сигналы
. Задатчики 29, 27 и 32 формируют сигналы  , m2 и m1 соответственно. Положительные входы сумматоров 28 и 40 и первый положительный вход сумматора 30 (со стороны задатчика 29) имеют единичные коэффициенты усиления, второй положительный вход сумматора 30 имеет коэффициент усиления r2. В результате на выходах сумматоров 28, 40 и 30 формируются сигналы m2+mГ, m1+m2+mГ и
, m2 и m1 соответственно. Положительные входы сумматоров 28 и 40 и первый положительный вход сумматора 30 (со стороны задатчика 29) имеют единичные коэффициенты усиления, второй положительный вход сумматора 30 имеет коэффициент усиления r2. В результате на выходах сумматоров 28, 40 и 30 формируются сигналы m2+mГ, m1+m2+mГ и  соответственно.
соответственно.
На выходе блока 3 умножения формируется сигнал  , на выходе блока 15 - сигнал
, на выходе блока 15 - сигнал  , а на выходе блока 42 - сигнал
, а на выходе блока 42 - сигнал  .
.
Положительные входы сумматора 17 имеют единичные коэффициенты усиления. Первый (со стороны блока 25) положительный вход сумматора 24 имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления 2. В результате на выходах сумматоров 17 и 24 формируются сигналы  и
и  соответственно, а на выходе блока 26 - сигнал
соответственно, а на выходе блока 26 - сигнал 
Первый отрицательный (со стороны блока 39) и второй положительный входы сумматора 37 имеют единичные коэффициенты усиления. В результате на выходе этого сумматора формируется сигнал  , а на выходе блока 18 - сигнал
, а на выходе блока 18 - сигнал 
Выходной сигнал релейного элемента 34 имеет вид
где  - величина момента сухого трения при движении.
- величина момента сухого трения при движении.
Первый (со стороны блока 3), второй (со стороны датчика 7), третий (со стороны релейного элемента 31) и пятый (со стороны сумматора 40) положительные входы сумматора 4 имеют коэффициенты усиления  ,
,  ,
,  ,
,  соответственно; а его четвертый и шестой положительные входы - коэффициенты усиления
соответственно; а его четвертый и шестой положительные входы - коэффициенты усиления  .
.
В результате на выходе сумматора 4 формируется сигнал 
где JH - номинальное (желаемое) значение приведенного момента инерции рассматриваемого электропривода.
Несложно показать, что поскольку  при движении электропривода достаточно точно соответствует Мстр, то, подставив полученное значение U* (3) в соотношение (2), получим уравнение
при движении электропривода достаточно точно соответствует Мстр, то, подставив полученное значение U* (3) в соотношение (2), получим уравнение  , которое имеет постоянные желаемые параметры. То есть предложенный электропривод, управляющий координатой q4, будет обладать постоянными желаемыми динамическими свойствами и качественными показателями.
, которое имеет постоянные желаемые параметры. То есть предложенный электропривод, управляющий координатой q4, будет обладать постоянными желаемыми динамическими свойствами и качественными показателями.
Таким образом, за счет введения дополнительных элементов и новых связей удалось обеспечить полную инвариантность рассматриваемого электропривода к действующим на него силовым воздействиям. Это позволяет получить стабильно высокое качество управления в любых его режимах работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2423225C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2454695C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2348509C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2424894C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372186C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2454696C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2453892C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398672C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2363972C2 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2423224C2 |
Изобретение относится к робототехнике и может быть использовано для создания электроприводов роботов. За счет дополнительного введения первого и второго датчиков ускорения, восьмого, девятого и десятого блоков умножения, десятого и одиннадцатого сумматоров, а также квадратора и соответствующих связей удалось обеспечить полную инвариантность динамических свойств электропривода к непрерывно изменяющимся параметрам нагрузки. Изобретение позволяет получить стабильно высокое качество управления в любых режимах работы электропривода. 2 ил.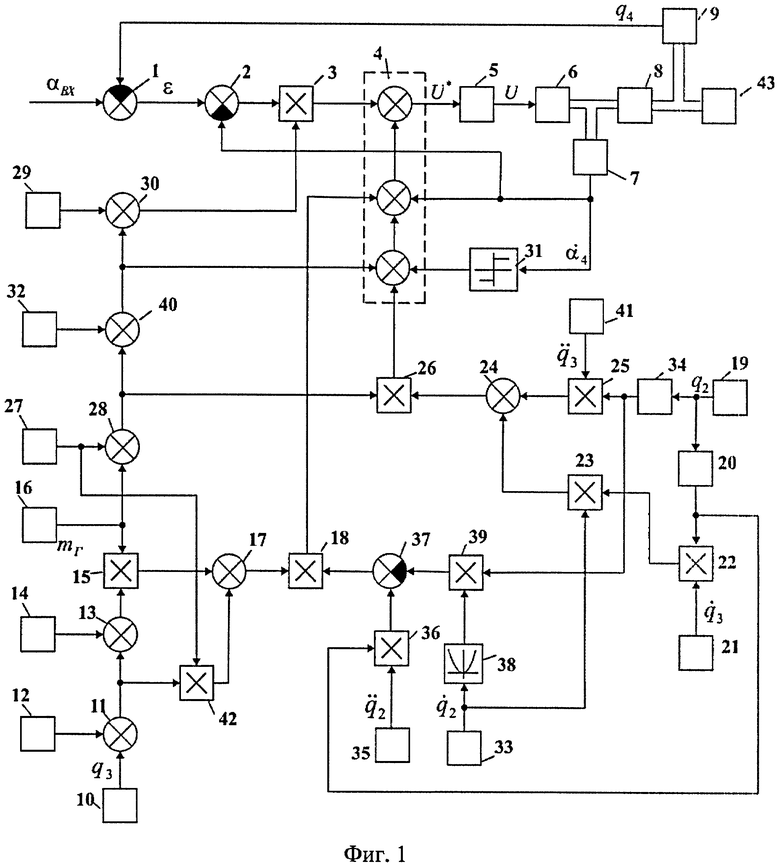
Электропривод робота, содержащий последовательно соединенные первый и второй сумматоры, первый блок умножения, третий сумматор, усилитель, электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к первому входу первого сумматора, второй вход которого соединен со входом устройства, последовательно соединенные второй датчик положения, четвертый сумматор, второй вход которого подключен к выходу первого задатчика постоянного сигнала, пятый сумматор, второй вход которого подключен к выходу второго задатчика постоянного сигнала, второй блок умножения, второй вход которого подключен к выходу датчика массы, шестой сумматор и третий блок умножения, последовательно соединенные третий датчик положения и первый косинусный функциональный преобразователь, последовательно соединенные второй датчик скорости, четвертый и пятый блоки умножения, седьмой сумматор, второй вход которого подключен к выходу шестого блока умножения, и седьмой блок умножения, последовательно соединенные третий задатчик постоянного сигнала и восьмой сумматор, последовательно соединенные четвертый задатчик постоянного сигнала и девятый сумматор, релейный элемент, вход которого подключен к выходу первого датчика скорости и вторым входам второго и третьего сумматоров, а выход - к третьему входу третьего сумматора, а также пятый задатчик постоянного сигнала, третий датчик скорости и второй синусный функциональный преобразователь, вход которого подключен к выходу третьего датчика положения, отличающийся тем, что в него дополнительно введены последовательно соединенные первый датчик ускорения, восьмой блок умножения, второй вход которого подключен к выходу первого функционального преобразователя и второму входу четвертого блока умножения, десятый сумматор, второй вход которого через последовательно соединенные квадратор и девятый блок умножения подключен к выходу третьего датчика скорости и второму входу пятого блока умножения, а выход - ко второму входу третьего блока умножения, выход которого соединен с четвертым входом третьего сумматора, а также одиннадцатый сумматор, первый и второй входы которого соединены с выходами восьмого сумматора и пятого задатчика постоянного сигнала, а выход - с пятым входом третьего сумматора и вторым входом девятого сумматора, выход которого подключен ко второму входу первого блока умножения, второй датчик ускорения, выход которого соединен с первым входом шестого блока умножения, второй вход которого подключен к выходу второго функционального преобразователя и второму входу девятого блока умножения, и десятый блок умножения, первый и второй входы которого подключены к выходам четвертого сумматора и третьего задатчика постоянного сигнала, а выход - ко второму входу шестого сумматора, причем шестой вход третьего сумматора соединен с выходом седьмого блока умножения, второй вход которого подключен к выходу восьмого сумматора, второй вход которого подключен к выходу датчика массы, а выход редуктора соединен с шестерней.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028931C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2312006C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2348509C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| Щитовой добычной агрегат для очистной выемки угля при разработке пологопадающих пластов короткими забоями | 1957 |
|
SU120198A1 |

