Настоящая заявка притязает на приоритет предварительной заявки на патент США № 60/811245, озаглавленной "СПОСОБ И СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ОБРАТНОЙ СВЯЗИ ДЛЯ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ", зарегистрированной 5 июня 2006 года, назначенной на правообладателя настоящего документа и включенной в настоящий документ по ссылке.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее раскрытие имеет отношение к связи вообще и, в частности, к методике отправки информации обратной связи для формирования диаграммы направленности в системе беспроводной связи.
Уровень техники
В системе беспроводной связи передатчик может использовать несколько (T) передающих антенн для передачи данных приемнику, оборудованному несколькими (R) принимающими антеннами. Несколько передающих и принимающих антенн формируют канал с множеством входов и множеством выходов (MIMO), который может использоваться для увеличения пропускной способности и/или улучшения надежности. Например, передатчик может отправить до T потоков данных одновременно с T передающих антенн для улучшения пропускной способности. В качестве альтернативы передатчик может отправить один поток данных со всех T передающих антенн для улучшения приема приемником.
Хорошие рабочие характеристики (например, высокая пропускная способность) могут быть достигнуты посредством передачи одного или более потоков данных с помощью формирования диаграммы направленности. Чтобы выполнить формирование диаграммы направленности, передатчик может отправить приемнику проверочный кадр, содержащий известные обучающие символы. Термины "кадр" и "пакет" являются синонимичными и используются здесь взаимозаменяемо. Приемник может принять проверочный кадр и оценить характеристику канала MIMO на основе обучающих символов. Затем приемник может отправить передатчику информацию обратной связи. Информация обратной связи может включать в себя матрицы канала или матрицы формирования диаграммы направленности, которые могут использоваться передатчиком для выведения направляющих матриц для формирования диаграммы направленности. Желательно отправить информацию обратной связи как можно быстрее. Поскольку канал MIMO может изменяться и чрезмерная задержка при отправке информации обратной связи может привести к тому, что информация устареет к тому времени, когда она будет использована для передачи данных приемнику, в области техники имеется потребность в методике отправки информации обратной связи для формирования диаграммы направленности с настолько малой задержкой, насколько это возможно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Здесь описана методика быстрой отправки информации обратной связи для формирования диаграммы направленности. Передатчик/инициатор может отправить первый кадр, содержащий обучающие символы. Приемник/респондент может принять первый кадр, определить количество времени для формирования информации обратной связи на основе обучающих символов и определить количество времени для отправки информации обратной связи. Затем приемник может определить длину второго кадра, несущего информацию обратной связи, на основе количества времени для формирования информации обратной связи и количества времени для отправки информации обратной связи. Второй кадр может являться составным кадром, содержащим первую часть, за которой следует вторая часть. Первая часть может иметь длину, равную или превышающую количество времени для формирования информации обратной связи. Вторая часть может нести информацию обратной связи.
Приемник может отправить второй кадр после ожидания в течение периода короткого межкадрового промежутка (SIFS) с конца первого кадра, не выполняя доступ к каналу, что может уменьшить задержку отправки информации обратной связи. Приемник может сформировать информацию обратной связи на основе обучающих символов и отправить информацию обратной связи во втором кадре, когда информация готова. Информация обратной связи может содержать по меньшей мере одну матрицу канала, по меньшей мере одну матрицу формирования диаграммы направленности и т.д. Передатчик может принять второй кадр, вывести по меньшей мере одну направляющую матрицу на основе информации обратной связи и отправить третий кадр с пространственной обработкой передачи на основе по меньшей мере одной направляющей матрицы.
Ниже более подробно описываются различные аспекты и признаки раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
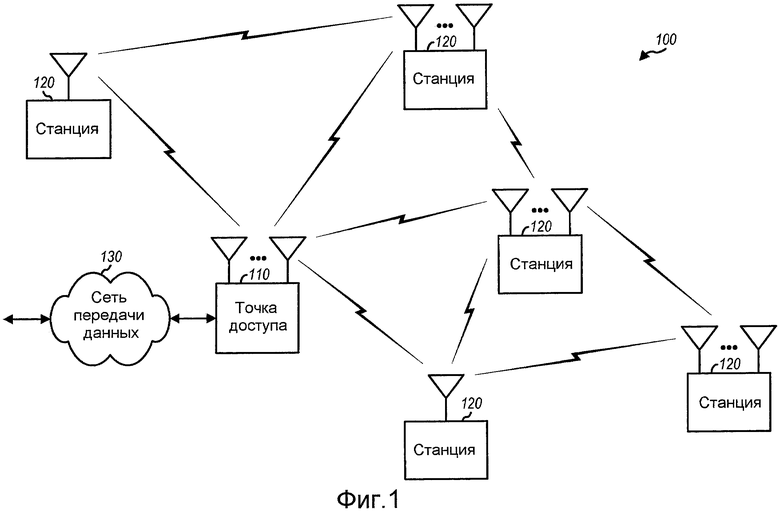
Фиг. 1 показывает беспроводную сеть с точкой доступа и несколькими станциями.
Фиг. 2 показывает обмен кадрами для отправки информации обратной связи для формирования диаграммы направленности.
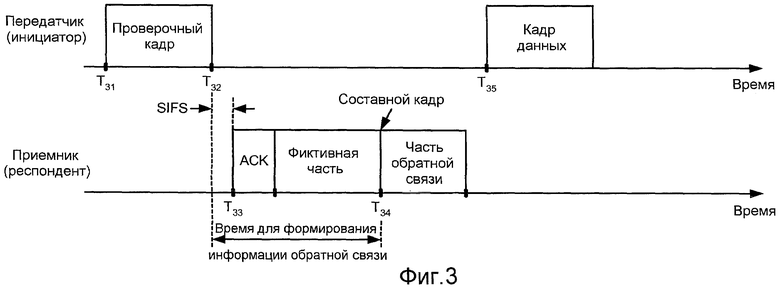
Фиг. 3 показывает обмен кадрами с использованием составного кадра для отправки информации обратной связи для формирования диаграммы направленности с насколько возможно малой задержкой.
Фиг. 4A и 4B показывают две структуры кадра в стандарте IEEE 802.11n.
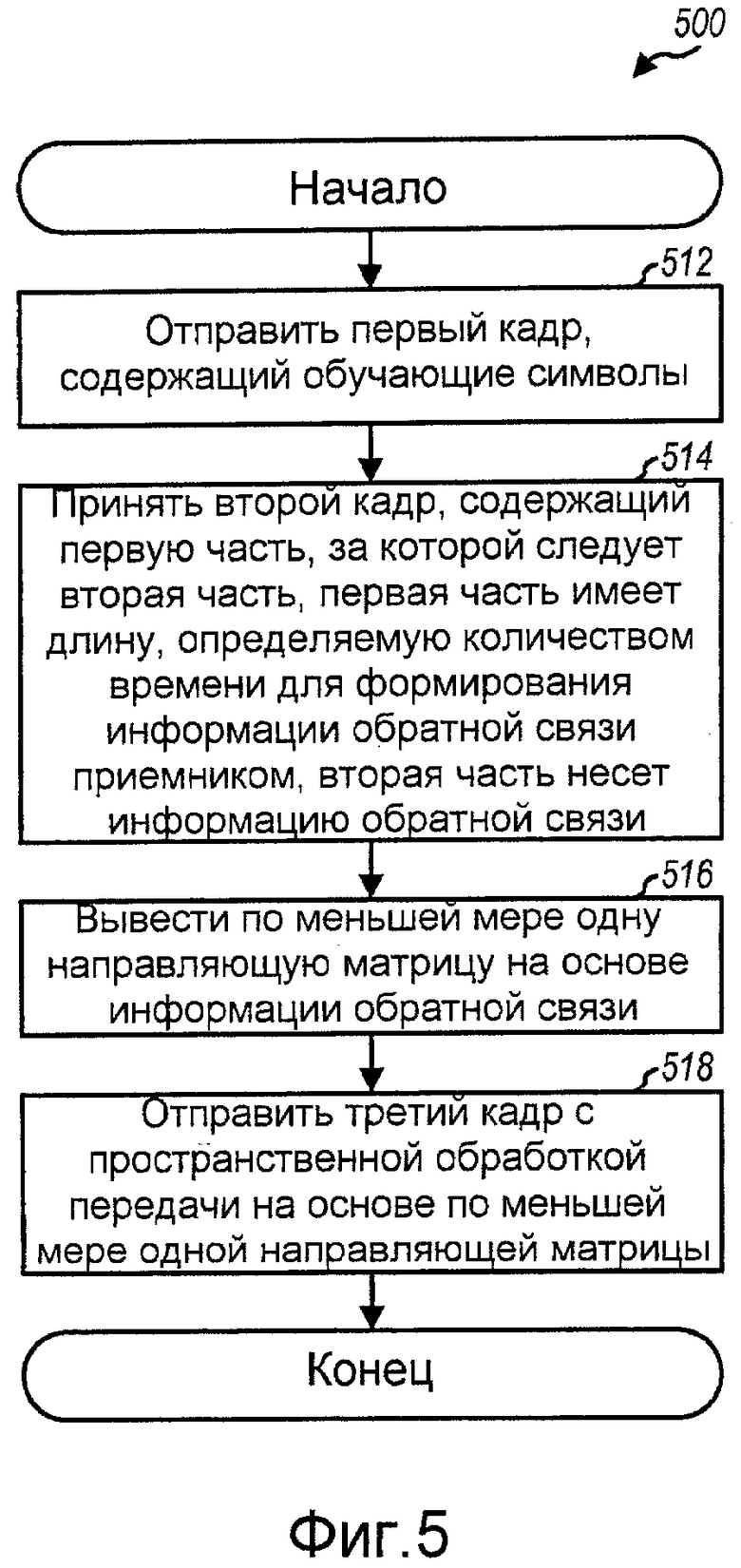
Фиг. 5 показывает процесс, выполняемый передатчиком/инициатором.
Фиг. 6 показывает устройство для передатчика/инициатора.
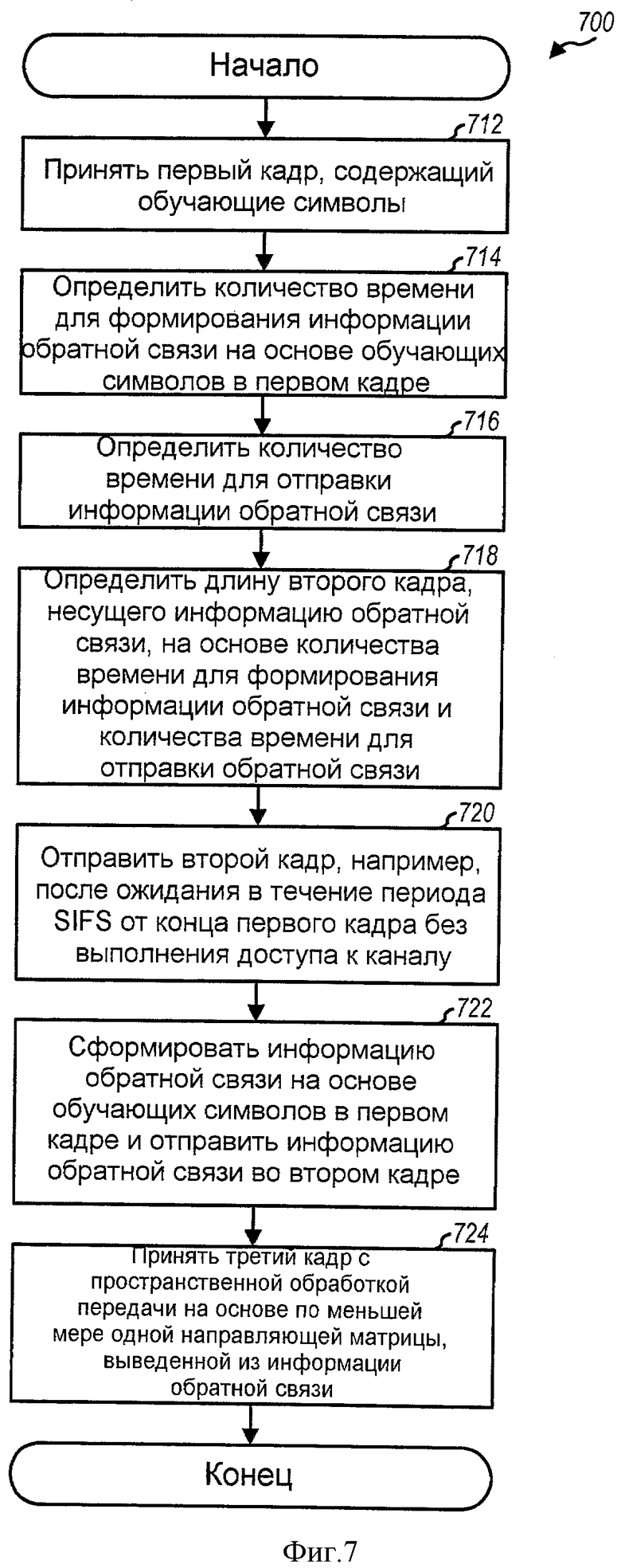
Фиг. 7 показывает процесс, выполняемый приемником/респондентом.
Фиг. 8 показывает устройство для приемника/респондента.
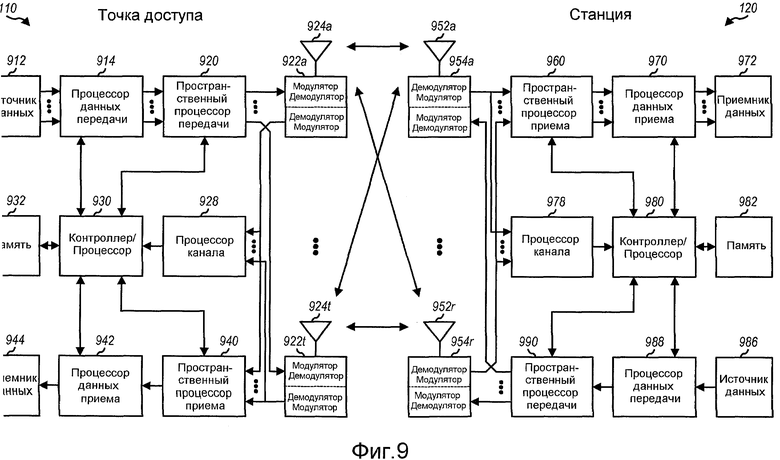
Фиг. 9 показывает блок-схему точки доступа и одной станции.
ПОДРОБНОЕ ОПИСАНИЕ
Описанная здесь методика может использоваться для различных сетей беспроводной связи и систем, таких как беспроводные локальные сети (WLAN), беспроводные общегородские сети (WMAN), беспроводные глобальные сети (WWAN) и т.д. Термины "сети" и "системы" часто используются взаимозаменяемо. Беспроводная локальная сеть (WLAN) может реализовать любую из беспроводных технологий в семействе стандартов IEEE 802.11, беспроводную локальную сеть с высокой производительностью (Hiperlan) и т.д. Беспроводная общегородская сеть (WMAN) может реализовать стандарт IEEE 802.16 и т.д. Беспроводная глобальная сеть (WWAN) может являться сетью сотовой связи, такой как сеть с множественным доступом с кодовым разделением каналов (CDMA), сеть с множественным доступом с временным разделением каналов (TDMA), сеть с множественным доступом с частотным разделением каналов (FDMA), сеть с множественным доступом с ортогональным частотным разделением каналов (OFDMA), сеть FDMA с одной несущей (SC-FDMA) и т.д. Для ясности некоторые аспекты методики описываются ниже для беспроводной локальной сети, которая реализует стандарт IEEE 802.11n.
Стандарт IEEE 802.11n использует мультиплексирование с ортогональным частотным разделением (OFDM), являющееся методикой модуляции, которая делит ширину полосы пропускания системы на несколько (K) ортогональных поднесущих. В стандарте IEEE 802.11n все K = 64 поднесущие определяются с помощью мультиплексирования OFDM, и им назначены индексы от -32 до +31. Все 64 поднесущие включают в себя 52 поднесущие данных с индексами ± {1, ..., 6, 8, ..., 20, 22, ..., 28} и четыре контрольные поднесущие с индексами ± {7, 21}. Поднесущая DC с индексом 0 и остальные поднесущие не используются. Стандарт IEEE 802.11n также поддерживает передачу MIMO от нескольких передающих антенн на несколько принимающих антенн. Стандарт IEEE 802.11n описан в документе, названном "IEEE P802.11n™/D2.00, Часть 11: Спецификации управления доступом к среде передачи (MAC) и физического канала (PHY) для беспроводной локальной сети (LAN): Дополнение: Расширения для более высокой пропускной способности", февраль 2007 года, который является общедоступным.
Фиг. 1 показывает беспроводную сеть 100 с точкой 110 доступа и несколькими станциями 120. В общем случае беспроводная сеть может включать в себя любое количество точек доступа и любое количество станций. Станция представляет собой устройство, которое может взаимодействовать с другой станцией через беспроводную среду/канал. Станция также может называться терминалом, мобильной станцией, пользовательским оборудованием, абонентским пунктом и т.д. и может содержать некоторые или все их функциональные возможности. Станция может являться сотовым телефоном, карманным устройством, беспроводным устройством, карманным компьютером (PDA), переносным компьютером, беспроводным модемом, беспроводным телефоном и т.д. Точка доступа представляет собой станцию, которая обеспечивает доступ к службам распределения через беспроводную среду для станций, привязанных к этой точке доступа. Точка доступа также может называться базовой станцией, базовой приемопередающей станцией (BTS), узлом B и т.д. и может содержать некоторых или все их функциональные возможности. Станции 120 могут взаимодействовать с точкой 110 доступа и/или друг с другом через одноранговую связь. Точка 110 доступа может быть присоединена к сети передачи данных 130 и может взаимодействовать с другими устройствами через сеть передачи данных. Сеть 130 передачи данных может являться Интернетом, интранетом или любой другой проводной или беспроводной сетью.
Описанная здесь методика может использоваться для передачи по каналу MIMO на нисходящей линии связи, а также на восходящей линии связи. Для нисходящей линии связи точка 110 доступа может являться передатчиком, и станции 120 могут являться приемниками. Для восходящей линии связи станции 120 могут являться передатчиками, и точка 110 доступа может являться приемником.
Канал MIMO, образованный несколькими (T) передающими антеннами в передатчике и несколькими (R) принимающими антеннами в приемнике, может быть характеризован матрицей H k с размерностью R×T для каждой поднесущей k или каждой группы интересующих поднесущих. Матрица H k канала может быть сделана диагональной посредством выполнения декомпозиции собственных значений матрицы корреляции для матрицы H k следующим образом:
R k=H k H H k=V k Λ k V k H, Уравнение (1),
где R k - матрица корреляции для матрицы H k с размерностью T×T,
V k - унитарная матрица с размерностью T×T, столбцы которой являются собственными векторами матрицы R k,
Λ k - диагональная матрица с размерностью T×T собственных значений матрицы R k и
"H" обозначает транспонирование.
Унитарная матрица V k характеризуется свойством V k H V k = I, где I - единичная матрица. Столбцы унитарной матрицы являются ортогональными по отношению друг к другу, и каждый столбец имеет единичную мощность. Матрица V k также называется матрицей формирования диаграммы направленности. Диагональная матрица Λ k содержит возможные ненулевые значения вдоль диагонали и нули во всех других местах. Диагональные элементы матрицы Λ k являются собственными значениями, представляющими коэффициенты усиления по мощности собственных векторов матрицы R k.
Передатчик может выполнять пространственную обработку передачи для формирования диаграммы направленности на приемник следующим образом:
z k=Q k x k, Уравнение (2),
где x k - вектор, содержащий до T символов, которые должны быть отправлены на поднесущей k,
Q k - направляющая матрица для поднесущей k, которая может быть выведена на основе матрицы V k, и
z k - вектор, содержащий T выходных символов для T передающих антенн на поднесущей k.
Формирование диаграммы направленности в Уравнении (2) направляет или формирует лучи, отправленные от передатчика к приемнику. Для эффективного формирования диаграммы направленности передатчик должен иметь точную оценку характеристик канала MIMO от передатчика к приемнику. Эта информация относительно канала MIMO может использоваться для выведения подходящих направляющих матриц для пространственной обработки передачи для направления лучей от передатчика к приемнику.
Для явного формирования диаграммы направленности передатчик может отправить приемнику проверочный кадр. Проверочный кадр представляет собой кадр, несущий известные обучающие символы, которые позволяют приемнику оценить матрицу канала для каждой поднесущей или каждой группы интересующих поднесущих. Проверочный кадр может содержать или не содержать другие данные помимо обучающих символов. Передатчик может отправить либо (i) не направляющий проверочный кадр без использования направляющей матрицы, либо (ii) направляющий проверочный кадр с использованием направляющей матрицы Q'k, полученный из более раннего обмена кадрами с приемником. Приемник может оценить либо (i) фактическую матрицу канала H k на основе не направляющего проверочного кадра, либо (ii) эффективную матрицу канала Η eff,k = H k Q'k на основе направляющего проверочного кадра.
Приемник может отправить передатчику матрицы H k или H eff,k канала в качестве информации обратной связи. Матрицы H k и Η eff,k также могут называться матрицами информации о состоянии канала (CSI). Передатчик может вывести матрицу V k на основе матрицы H k или матрицы H eff,k, полученной от приемника. Затем передатчик может вывести направляющую матрицу Q k на основе матрицы V k, например, Q k = V k, если приемнику был отправлен не управляющий проверочный кадр, или Q k = Q'k V k, если был отправлен управляющий проверочный кадр. Затем передатчик может использовать матрицу Q k для отправки данных приемнику, например, как показано в Уравнении (2).
В качестве альтернативы приемник может вычислить матрицу V k на основе матрицы H k или H eff,k, полученной из проверочного кадра. Затем приемник может отправить передатчику матрицу V k в качестве информации обратной связи. Передатчик может вывести матрицу Q k на основе матрицы V k и затем может использовать матрицу Q k для отправки данных приемнику.
Фиг. 2 показывает обмен кадрами для отправки информации обратной связи для формирования диаграммы направленности. В момент T21 времени передатчик может отправить приемнику проверочный кадр. В стандарте IEEE 802.11n передатчик также называется инициатором, и приемник также называется респондентом. Проверочный кадр несет известные обучающие символы и может нести или не нести другие данные.
Приемник может отслеживать беспроводной канал на предмет кадров, отправленных приемнику. Приемник может распознать, что ему отправлен проверочный кадр, на основе адреса получателя в кадре, если в кадре присутствуют данные управления доступом к среде (MAC). Если используется формат проверочного кадра, у которого нет данных управления доступом к среде (MAC) (например, нулевой пакет данных в стандарте IEEE 802.11n), то намеченному получателю отправляют предшествующую индикацию о прибытии проверочного кадра. После обнаружения конца проверочного кадра в момент T22 времени приемник может ожидать в течение периода SIFS, который в стандарте IEEE 802.11n составляет 16 микросекунд (мкс), и затем отправляет подтверждение (ACK) для проверочного кадра в момент T23 времени. Беспроводной канал может совместно использоваться многими станциями. Период SIFS является достаточно коротким, с тем чтобы приемник мог управлять усилением беспроводного канала сразу же после проверочного кадра без необходимости конкурировать за беспроводной канал с другими станциями, которые могут желать получить доступ к каналу.
Приемник может оценить матрицу H k или Η eff,k канала для каждой поднесущей или каждой группы интересующих поднесущих на основе обучающих символов в проверочном кадре. Приемник также может вывести матрицу V k для каждой поднесущей или каждой группы поднесущих на основе матрицы H k или матрицы H eff,k. Затем приемник может сформировать информацию обратной связи на основе матрицы H k, матрицы H eff,k или матрицы V k.
После формирования информации обратной связи в момент T24 времени приемник может выполнить доступ к каналу для получения доступа к беспроводному каналу. Доступ к каналу может занять несколько миллисекунд (мс) или больше в зависимости от величины активности на канале. После получения доступа к каналу в момент T25 времени приемник может отправить кадр, содержащий информацию обратной связи. Передатчик может принять кадр обратной связи от приемника и в момент T26 времени может отправить кадр данных с направляющими матрицами, выведенными на основе информации обратной связи.
Как показано на фиг.2, приемник может сразу же возвратить передатчику подтверждение (ACK) для проверочного кадра, но может отправить информацию обратной связи в незапрашиваемом кадре в более позднее время. Приемник не может априорно знать, когда будут приняты проверочные кадры, и никакие ресурсы не могут быть выделены для обработки проверочного кадра. Кроме того, независимо от того, имеет ли приемник предшествующее знание о входящем проверочном кадре, обычно необходимо некоторое количество времени для обработки проверочного кадра. Например, декомпозиция собственных значений в Уравнении (2) может являться интенсивной в вычислительном отношении и может иметься много поднесущих для оценки матрицы канала и выведения матрицы формирования диаграммы направленности.
Отправка незапрашиваемого кадра в более позднее время может предоставить приемнику достаточное количество времени для обработки проверочного кадра и формирования информации обратной связи. Однако приемнику нужно будет выполнить доступ к каналу для отправки незапрашиваемого кадра, содержащего информацию обратной связи. Этот доступ к каналу может повлечь за собой дополнительную (и переменную) задержку. Поскольку беспроводной канал может изменяться, информация обратной связи может устареть или стать менее точной из-за задержки доступа к каналу.
В общем случае желательно отправить информацию обратной связи как можно быстрее. Если приемник может сформировать информацию обратной связи в очень короткое время, например порядка периода SIFS, то приемник может отправить информацию обратной связи вместе с подтверждением (ACK) в непосредственном кадре, начинающемся в момент T23 времени. Непосредственный кадр представляет собой кадр, отправленный после ожидания периода SIFS с конца предшествующего принятого кадра. Однако приемник может не иметь возможности сформировать информацию обратной связи в пределах периода SIFS и может не быть в состоянии отправить информацию обратной связи в непосредственном кадре. Необходимость формирования информации обратной связи в пределах периода SIFS и ее отправки в непосредственном кадре может наложить строгие требования на аппаратное оборудование/полупроводники приемника, что может являтьcя нежелательным.
Фиг. 3 показывает обмен кадрами с использованием составного кадра для отправки информации обратной связи для формирования диаграммы направленности с насколько возможно малой задержкой. Передатчик может отправить проверочный кадр приемнику с момента T31 времени до момента T32 времени. Приемник может принять проверочный кадр, определить количество времени, необходимое для формирования информации обратной связи, и определить количество времени, необходимое для отправки информации обратной связи. Затем приемник может сформировать составной кадр, содержащий подтверждение (ACK) для проверочного кадра, первую/фиктивную часть для количества времени, необходимого для формирования информации обратной связи, и вторую часть для информации обратной связи. Первая часть может нести любые данные, которые будут отправлены приемником передатчику, и может быть сформирована посредством соблюдения правил объединения кадров в пределах составного блока данных протокола MAC (A-MPDU) или составного кадра. В качестве альтернативы первая часть может включать в себя нулевые данные и т.д. Затем приемник может ожидать в течение периода SIFS и затем отправить составной кадр, начиная с момента T33 времени. Приемник может обработать проверочный кадр и сформировать информацию обратной связи, пока отправляется составной кадр. Информация обратной связи может быть готова к концу первой части в момент T34 времени и может быть отправлена без дополнительной задержки во второй части составного кадра.
Передатчик может принять составной кадр от приемника. В момент T35 времени передатчик может отправить кадр данных с направляющими матрицами, выведенными на основе информации обратной связи.
Как показано на фиг. 3, приемник может сразу же возвратить передатчику подтверждение (ACK) для проверочного кадра и может отправить информацию обратной связи в том же самом непосредственном составном кадре, чтобы избежать дополнительной задержки, связанной с выполнением доступа к каналу. Приемник может сформировать информацию обратной связи в соответствии со своими возможностями и может выбрать подходящую продолжительность для первой части, чтобы иметь достаточное количество времени для формирования информации обратной связи. Приемник может отправить информацию обратной связи во второй части составного кадра, как только информация будет готова, не имея необходимости выполнять доступ к каналу.
Составной кадр, несущий информацию обратной связи, может быть сформирован различными способами для различных систем. Для ясности ниже описан составной кадр в стандарте IEEE 802.11n.
В стандарте IEEE 802.11n протокол управления доступом к среде передачи (MAC) обрабатывает данные как блоки данных протокола MAC (MPDU). Затем протокол слияния физического уровня (PLCP) обрабатывает блоки MPDU, чтобы сформировать блоки данных протокола PLCP (PPDU). Затем физический уровень (PHY) обрабатывает каждый блок PPDU, чтобы сформировать кадр, который передается через беспроводный канал. В протоколе IEEE 802.11n могут использоваться блоки PPDU для высокой пропускной способности (HT-PPDU) для передачи по каналу MIMO с нескольких передающих антенны на несколько приемных антенн.
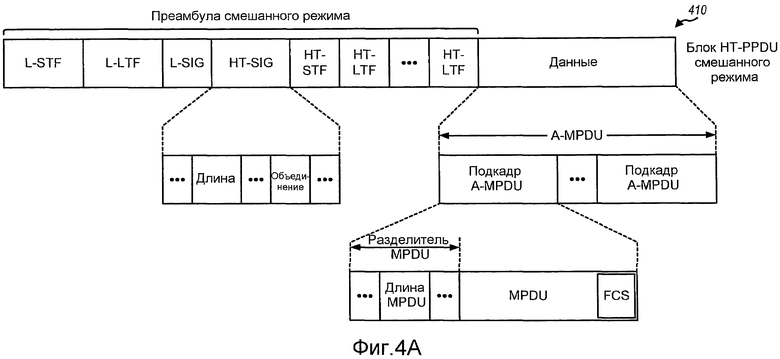
Фиг. 4А показывает структуру блока HT-PPDU 410 со смешанным форматом с высокой пропускной способностью (HT) в стандарте IEEE 802.11n. Блок HT-PPDU 410 включает в себя преамбулу смешанного режима, за которой следует поле данных. Преамбула смешанного режима включает в себя (i) преамбулу прежних версий, составленную из короткого обучающего поля прежних версий (L-STF) и длинного обучающего поля прежних версий (L-LTF), (ii) управляющее поле прежних версий (L-SIG), (iii) управляющее поле для высокой пропускной способности (HT-SIG) и (iv) преамбулу для высокой пропускной способности, составленную из короткого обучающего поля для высокой пропускной способности (HT-STF) и одного или более длинных обучающих полей для высокой пропускной способности (HT-LTF). Количество полей HT-LTF равно или больше количества одновременно отправляемых потоков. Длинные и короткие обучающие поля несут известные обучающие символы, которые могут использоваться для обнаружения кадра, синхронизации, оценки и поправки частоты, автоматической регулировки усиления (AGC), оценки канала и т.д. Поля L-SIG и HT-SIG несут управляющую информацию для блока HT-PPDU. Например, поле HT-SIG несет (i) поле длины, которое указывает длину поля данных, и (ii) поле объединения (Aggr), которое указывает, несет ли поле данных составной блок MPDU (A-MPDU). Поле данных несет полезную информацию блока HT-PPDU и имеет переменную длину, указанную посредством поля длины. Блок HT-PPDU 410 может использоваться для проверочного кадра или составного кадра. Поля L-STF, L-LTF и L-SIG имеют общую длительность 20 мкс, и длительность фиктивной части может быть уменьшена посредством длительности этих полей прежних версий, когда блок HT-PPDU 410 используется для составного кадра.
Фиг.4В показывает структуру блока HT-PPDU 420 с форматом «зеленое поле» для высокой пропускной способности в стандарте IEEE 802.11n. Блок HT-PPDU 420 включает в себя преамбулу «зеленое поле», за которой следует поле данных. Преамбула «зеленое поле» включает в себя “«зеленое поле»” короткое обучающее поле для высокой пропускной способности (HT-GF-STF), длинное обучающее поле для высокой пропускной способности (НТ-LTF1), поле HT-SIG и одно или более полей HT-LTF. Поле HT-SIG несет поле длины и поле объединения, как показано на фиг.4А. Поле данных несет полезную информацию блока HT-PPDU и имеет переменную длину, указанную полем длины. Блок HT-PPDU 420 также может использоваться для проверочного кадра или составного кадра.
Блоки HT-PPDU 410 и 420 являются двумя форматами кадра блока PPDU, поддерживаемыми стандартом IEEE 802.11n. Блок HT-PPDU 410 может использоваться для развертывания беспроводной локальной сети (WLAN) как со станциями прежних версий, которые не поддерживают передачу с высокой пропускной способностью, так и со станциями, которые поддерживают передачу с высокой пропускной способностью. Станции прежних версий могут распознать преамбулу прежних версий и поле L-SIG, которое может информировать эти станции проигнорировать блок HT-PPDU. Блок HT-PPDU 420 может использоваться для кадров, передаваемых между станциями с поддержкой высокой пропускной способности. Форматы блока HT-PPDU 410, блока HT-PPDU 420 и других блоков PPDU, поддерживаемые стандартом IEEE 802.11n, описываются в упомянутом выше документе стандарта IEEE 802.11n.
Передатчик может отправить проверочный кадр с использованием блока HT-PPDU 410 или 420. Проверочный кадр включает в себя преамбулу для высокой пропускной способности, может включать или не включать в себя какие-либо из оставшихся полей в блоке HT-PPDU 410 или 420. Проверочный кадр может включать в себя поле данных, которое может нести один или более блоков MPDU с данными, предназначенными для приемника. Проверочный кадр также может являться нулевым пакетом данных (NDP) или кадром нулевой длины (ZLF), не имеющим поля данных.
Приемник может отправить составной кадр с использованием блока HT-PPDU 410 или 420. Составной кадр может включать в себя преамбулу смешанного режима, показанную на фиг.4А, или преамбулу «зеленое поле», показанную на фиг.4 В, а также поле данных. Поле данных может нести блок A-MPDU подходящей длины. Приемник может выбрать блок HT-PPDU 410 или 420 для составного кадра на основе различных факторов. Например, приемник может выбрать блок HT-PPDU 410 при работе в среде со смешанным режимом. Длина преамбулы смешанного режима больше длины преамбулы «зеленое поле» приблизительно на 8 мкс в стандарте IEEE 802.11n. Таким образом, приемник может выбрать блок HT-PPDU 410 или 420 на основе количества времени, необходимого для формирования информации обратной связи. Например, приемник может выбрать блок HT-PPDU 410, когда время формирования обратной связи превышает порог, который может являться длиной блока А-MPDU плюс допуск, например, 7 мкс, и может выбрать блок HT-PPDU 420 в ином случае. Приемник также может отправить блок HT-PPDU 410 смешанного режима, когда передатчик отправил блок «зеленое поле» HT-PPDU 420 с блоком MPDU. Приемник также может отправить блок HT-PPDU 410 смешанного режима, когда передатчик отправил блок «зеленое поле» HT-PPDU 420 для нулевого пакета данных (NDP)/кадра нулевой длины (ZLF).
Независимо от формата блока PPDU, выбранного для проверочного кадра, блок PPDU несет блок A-MPDU подходящей длины. Как показано на фиг.4А, блок A-MPDU содержит несколько субкадров блока A-MPDU, и каждый субкадр имеет переменную длину. Каждый субкадр блока A-MPDU включает в себя разделитель между блоками MPDU и блок MPDU. Разделитель между блоками MPDU включает в себя поле длины блока MPDU, которое указывает длину соответствующего блока MPDU. Каждый блок MPDU может содержать данные, которые закодированы отдельно посредством управления доступом к среде передачи (MAC) и могут включать в себя последовательность проверки кадра (FCS), используемую для обнаружения ошибок блока MPDU. Последовательность FCS также обычно называется проверкой с помощью циклического избыточного кода (CRC).
В общем случае приемник может формировать составной кадр с блоком A-MPDU, содержащим любое количество блоков MPDU. Один или более блоков MPDU могут охватить длительность времени, необходимую приемнику для формирования информации обратной связи, и могут называться фиктивными блоками MPDU. Каждый фиктивный блок MPDU может представлять собой любой правильный протокольный блок данных (PDU) протокола управления доступом к среде передачи (MAC), например, блок PDU управления протокола MAC, отраженное сообщение протокола ICMP и т.д. Тип данных, отправляемых в каждом фиктивном блоке MPDU, может быть обозначен соответствующими служебными битами в блоке MPDU, например, посредством значений типа и подтипа кадра в части управления/заголовка кадра блока MPDU. Один или более блоков MPDU могут нести информацию обратной связи для формирования диаграммы направленности и могут называться блоками MPDU обратной связи. Например, вся информация обратной связи может быть отправлена в одном блоке MPDU. В качестве альтернативы несколько блоков MPDU могут нести информацию обратной связи, например, и каждый блок MPDU несет информацию обратной связи для разных наборов поднесущих. Для ясности последующее описание предполагает, что в блоке A-MDPU оправляются один фиктивный блок MPDU и один блок MDPU обратной связи.
Приемник может сформировать и отправить передатчику разные типы обратной связи для формирования диаграммы направленности. В стандарте IEEE 802.11n приемник может отправить любую информацию обратной связи из следующей:
- Обратная связь с матрицами информации CSI - отправляет матрицы информации CSI, содержащие матрицу H k или H eff,k,
- Обратная связь с несжатой матрицей формирования диаграммы направленности - отправляет элементы матрицы V k, и
- Обратная связь со сжатой матрицей формирования диаграммы направленности - производит декомпозицию матрицы V k в набор матриц и отправляет углы для этих матриц.
Приемник может знать априорно, сколько времени необходимо для формирования обратной связи каждого типа. Приемник также может знать априорно, какое количество данных следует посылать для обратной связи каждого типа. Эта информация может храниться в таблице поиска.
После приема проверочного кадра приемник может выбрать тип обратной связи для отправки передатчику. Приемник также может определить количество времени для формирования информации обратной связи этого типа из таблицы поиска. Приемник может выяснить скорость передачи данных, которую следует использовать для составного кадра. Эта скорость передачи данных может быть определена на основе конфигурации приемника (например, количества антенн), условий канала и т.д. Приемник может оценить качество принятого сигнала на основе обучающих символов в проверочном кадре и может выбрать соответствующую скорость передачи данных на основе качества принятого сигнала. Из скорости передачи данных приемник может определить, сколько байтов данных можно отправить в каждом блоке времени, например, в каждом периоде символа OFDM, составляющем 4 мкс в стандарте IEEE 802.11n.
Приемник может определить длину (Len_D) фиктивной части блока A-MPDU на основе количества времени, необходимого для формирования информации обратной связи, и скорости передачи данных. Приемник также может определить длину (Len_FB) части обратной связи блока A-MPDU на основе количества данных, необходимых для отправки информации обратной связи и скорости передачи данных. Приемник может сформировать блок HT-PPDU с (i) полем длины в поле HT-SIG, установленным равным длине фиктивной части плюс длина части обратной связи, в блоке A-MPDU и (ii) полем объединения, установленным равным '1' для указания, что в поле данных блока HT-PPDU отправляется блок A-MPDU. Приемник может cформировать фиктивный блок MPDU с длиной Len_D и может установить поле длины блока MPDU соответствующего субкадра блока A-MPDU равным Len_D. Приемник также может сформировать блок MPDU обратной связи с длиной Len_FB и может установить поле длины блока MPDU соответствующего субкадра блока A-MPDU равным Len_FB.
Приемник может отправить блок HT-PPDU после ожидания в течение периода SIFS с конца проверочного кадра. Приемник может отправить преамбулу блока HT-PPDU, а также фиктивный блок MPDU, пока он формирует информацию обратной связи. Приемник может закодировать информацию обратной связи и отправить закодированные данные в блоке MPDU обратной связи, который может быть приложен в конце фиктивного блока MPDU.
Использование составного кадра с дополнительным/фиктивным блоком MPDU с длительностью, покрывающей время, необходимое для формирования информации обратной связи, может обеспечить некоторые преимущества. Во-первых, требования к аппаратному оборудованию/полупроводникам приемника могут быть уменьшены/ослаблены, поскольку приемник может иметь больше времени для формирования информации обратной связи. Дополнительный блок MPDU может являться особенно выгодным, когда передатчик отправляет проверочный кадр как нулевой пакет данных (NDP)/кадр нулевой длины (ZLF) без полезной информации управления доступом к среде передачи (MAC). В этом случае количество времени с конца проверочного кадра до начала непосредственного составного кадра является даже меньшим, чем для проверочного кадра с полезной информацией управления доступом к среде передачи (MAC). Использование дополнительного блока MPDU в непосредственном блоке A-MPDU может ослабить требования ко времени ответа приемника.
Передатчик может принять составной кадр от приемника и обработать этот кадр, чтобы восстановить информацию обратной связи, отправленную приемником. Передатчик может распознать, что блок A-MPDU отправлен в составном кадре, на основе поля объединения в поле HT-SIG. Передатчик может проверить каждый принятый блок MPDU на основе последовательности FCS для этого блока MPDU. Если блок MPDU обратной связи проходит проверку последовательности FCS, то передатчик может вывести направляющие матрицы на основе информации обратной связи, полученной из этого блока MPDU. Для обратной связи с матрицами информации CSI передатчик может получить матрицу H k или матрицу H eff,k из блока MPDU обратной связи, вывести матрицу V k на основе матрицы H k или матрицы H eff,k и обновить матрицу Q k на основе матрицы V k. Для обратной связи с несжатой или сжатой матрицей формирования диаграммы направленности передатчик может получить матрицу V k из блока MPDU обратной связи и обновить матрицу Q k на основе матрицы V k.
В передатчике уровень управления доступом к среде передачи (MAC) может выполнить проверку последовательности FCS, и уровень физического канала (PHY) может вывести направляющие матрицы. Уровень PHY может первоначально принять блок MPDU обратной связи и передать этот блок MPDU уровню MAC для проверки последовательности FCS. После прохождения проверки последовательности FCS уровень MAC может отправить блок MPDU обратной связи обратно уровню PHY для вычисления направляющей матрицы. Чтобы уменьшить количество времени для обработки блока MPDU обратной связи обеими уровнями PHY и MAC, информация обратной связи может быть сохранена в памяти, которая доступна и для уровня PHY, и для уровня MAC. Применение совместно используемой памяти может избежать потребности передавать данные между уровнем PHY и уровнем MAC. Уровень PHY также может выполнять вычисление направляющих матриц одновременно с проверкой последовательности FCS, выполняемой уровнем MAC, с тем чтобы некоторое вычисление направляющих матриц или его большая часть могло быть завершено к тому времени, когда сделана проверка последовательности FCS.
Уровень PHY также может выполнять вычисление направляющих матриц и объединять прием кадров конвейерным способом. Блок MPDU обратной связи может нести информацию обратной связи для поднесущей 1, затем для поднесущей 2 и т.д. и затем для поднесущей N. Уровень PHY может выполнять вычисление направляющей матрицы для каждой поднесущей после получения информации обратной связи для этой поднесущей, в то время как информация обратной связи для оставшихся поднесущих принимается. Организация конвейера для вычисления направляющих матриц и приема кадров может уменьшить задержки обработки, с тем чтобы следующий непосредственный кадр с направляющими матрицами, выведенными из информации обратной связи, мог быть отправлен как можно быстрее.
Передатчик также может вывести направляющие векторы для одной моды за один раз. Каждая направляющая матрица может содержать S столбцов для S лучей (или мод), которые могут быть отправлены параллельно с T передающих антенн, где 1≤S≤T. Передатчик может вывести направляющие векторы для одной моды для всех интересующих поднесущих и может использовать эти направляющие векторы для передачи данных при вычислении направляющих векторов для другой моды. Передатчик может использовать направляющие векторы для каждой моды для передачи данных по мере их вычисления. Если передатчик и приемник имеют текущий обмен кадрами, то эта обработка может позволить передатчику и приемнику эффективно использовать явное формирование диаграммы направленности в непосредственном ответном обмене кадрами.
Фиг. 5 показывает схему процесса 500, выполняемого передатчиком/инициатором. Первый кадр (например, проверочный кадр), содержащий обучающие символы, может быть отправлен приемнику (этап 512). Второй кадр (например, составной кадр), содержащий первую часть, за которой следует вторая часть, может быть принят, например, по прошествии периода SIFS с конца первого кадра (этап 514). Первая часть может содержать по меньшей мере один блок MPDU, имеющий длину, определяемую количеством времени для формирования информации обратной связи приемником. Вторая часть может содержать по меньшей мере один блок MPDU, несущий информацию обратной связи.
По меньшей мере одна направляющая матрица может быть выведена на основе информации обратной связи, полученной из второго кадра (этап 516). Для этапа 516 по меньшей мере одна матрица канала может быть получена из информации обратной связи. По меньшей мере одна матрица формирования диаграммы направленности может быть выведена на основе по меньшей мере одной матрицы канала и использоваться для выведения по меньшей мере одной направляющей матрицы. В качестве альтернативы по меньшей мере одна матрица формирования диаграммы направленности может быть получена из информации обратной связи и использоваться для выведения по меньшей мере одной направляющей матрицы. В любом случае третий кадр может быть отправлен приемнику с пространственной обработкой передачи на основе по меньшей мере одной направляющей матрицы (этап 518).
Фиг. 6 показывает схему устройства 600 для передатчика/инициатора. Устройство 600 включает в себя средство для отправки первого кадра, содержащего обучающие символы (модуль 612), средство для приема второго кадра, содержащего первую часть, за которой следует вторая часть, первая часть имеет длину, определяемую количеством времени для формирования информации обратной связи приемником, и вторая часть несет информацию обратной связи (модуль 614), средство для вывода по меньшей мере одной направляющей матрицы на основе информации обратной связи, полученной из второго кадра (модуль 616), и средство для отправки третьего кадра с пространственной обработкой передачи на основе по меньшей мере одной направляющей матрицы (модуль 618).
Фиг. 7 показывает схему процесса 700, выполняемого приемником/респондентом. Первый кадр, содержащий обучающие символы, может быть принят от передатчика/инициатора (этап 712). Может быть определено количество времени для формирования информации обратной связи на основе обучающих символов в первом кадре (этап 714). Также может быть определено количество времени для отправки информации обратной связи (этап 716). Длина второго кадра, несущего информацию обратной связи, может быть определена на основе количества времени для формирования информации обратной связи и количества времени для отправки информации обратной связи (этап 718). Второй кадр может быть отправлен передатчику после ожидания в течение периода SIFS с конца первого кадра без выполнения доступа к каналу (этап 720). Информация обратной связи может быть сформирована на основе обучающих символов в первом кадре и отправлена во втором кадре (этап 722). Может быть принят третий кадр с пространственной обработкой передачи на основе по меньшей мере одной направляющей матрицы, выведенной из информации обратной связи (этап 724).
Для этапов 714 и 716 тип информации обратной связи, которую следует сформировать, может быть идентифицирован из числа нескольких типов информации обратной связи. Скорость передачи данных, которую следует использовать для второго кадра, может быть определена, например, на основе качества принятого сигнала, выясненного из обучающих символов в первом кадре. Количество времени для формирования информации обратной связи может быть определено на основе типа информации обратной связи, которую следует сформировать, и/или других факторов. Количество времени для отправки информации обратной связи может быть определено на основе скорости передачи данных для второго кадра, типа информации обратной связи, которую следует отправить, и/или других факторов.
Второй кадр может содержать первую часть, за которой следует вторая часть. Первая часть может иметь длину, равную количеству времени для формирования информации обратной связи или превышающую его. Вторая часть может нести информацию обратной связи. Второй кадр может нести блок A-MPDU с первым набором из по меньшей мере одного блока MPDU для первой части, за которой следует второй набор из по меньшей мере одного блока MPDU для второй части. Первый набор из по меньшей мере одного блока MPDU может иметь длину, равную количеству времени для формирования информации обратной связи или превышающую его. Второй набор из по меньшей мере одного блока MPDU может нести информацию обратной связи.
Для этапа 722 по меньшей мере одна матрица канала может быть выведена на основе обучающих символов в первом кадре. Информация обратной связи может быть сформирована на основе по меньшей мере одной матрицы канала и может содержать информацию CSI. В качестве альтернативы по меньшей мере одна матрица формирования диаграммы направленности может быть выведена на основе по меньшей мере одной матрицы канала. Информация обратной связи затем может быть сформирована на основе по меньшей мере одной матрицы формирования диаграммы направленности и может содержать несжатые или сжатые матрицы формирования диаграммы направленности.
Фиг. 8 показывает схему устройства 800 для приемника/респондента. Устройство 800 включает в себя средство для приема первого кадра, содержащего обучающие символы (модуль 812), средство для определения количества времени для формирования информации обратной связи на основе обучающих символов в первом кадре (модуль 814), средство для определения количества времени для отправки информации обратной связи (модуль 816), средство для определения длины второго кадра, несущего информацию обратной связи, на основе количества времени для формирования информации обратной связи и количества времени для отправки информации обратной связи (модуль 818), средство для отправки второго кадра, например, после ожидания в течение периода SIFS с конца первого кадра без выполнения доступа к каналу (модуль 820), средство для формирования информации обратной связи на основе обучающих символов в первом кадре и отправки информации обратной связи во втором кадре (модуль 822) и средство для приема третьего кадра с пространственной обработкой передачи на основе по меньшей мере одной направляющей матрицы, выведенной из информации обратной связи (модуль 824).
Модули на фиг. 6 и 8 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, блоки памяти и т.д. или любую их комбинацию.
Фиг. 9 показывает блок-схему точки 110 доступа и одной станции 120, показанных на фиг. 1. Точка 110 доступа оборудована несколькими (T) антеннами 924a-924t, которые могут использоваться для передачи и приема данных. Станция 120 оборудована несколькими (R) антеннами 952a-952r, которые могут использоваться для передачи и приема данных.
На нисходящей линии связи в точке 110 доступа процессор 914 данных передачи (TX) может принимать информационные данные от источника 912 данных и/или другие данные от контроллера/процессора 930. Процессор 914 данных передачи может обрабатывать (например, форматировать, кодировать, выполнять перемежение и преобразовывать в символы) принятые данные и формировать символы данных, которые являются символами модуляции для данных. Пространственный процессор TX 920 передачи может мультиплексировать символы данных с обучающими символами, выполнять пространственную обработку передачи с помощью направляющих матриц нисходящей линии связи и выдавать T потоков выходных символов T модуляторам (MOD) 922a-922t. Обучающие символы также обычно называются контрольными символами. Каждый модулятор 922 может обрабатывать свой выходной поток символов (например, для мультиплексирования OFDM), чтобы сформировать выходной поток элементарных сигналов. Каждый модулятор 922 может затем обрабатывать (например, преобразовывать в аналоговую форму, усиливать, фильтровать и преобразовывать с повышением частоты) свой выходной поток элементарных сигналов, чтобы сформировать сигнал нисходящей линии связи. T сигналов нисходящей линии связи от модуляторов 922a-922t могут быть переданы с антенн 924a-924t соответственно.
В станции 120 R антенн 952a-952r могут принимать сигналы нисходящей линии связи от точки 110 доступа, и каждая антенна 952 может выдавать принятый сигнал соответствующему демодулятору (DEMOD) 954. Каждый демодулятор 954 может выполнять обработку, являющуюся взаимодополняющей для обработки, выполненной модуляторами 922, для получения принятых символов. Пространственный процессор 960 приема (RX) может выполнять пространственную согласованную фильтрацию над символами, принятыми от всех демодуляторов 954a-954r, и выдавать оценки символов данных, которые являются оценками символов данных, переданных точкой 110 доступа. Процессор 970 данных передачи может затем обработать (например, выполнить обратное преобразование символов, выполнить обратное чередование и декодировать) оценки символов данных и выдать декодированные данные приемнику 972 данных и/или контроллеру/процессору 980.
Процессор 978 канала может обрабатывать обучающие символы, принятые от точки 110 доступа, и может оценивать характеристику канала MIMO нисходящей линии связи. Процессор 978 может анализировать матрицу канала нисходящей линии связи для каждой поднесущей или каждой группы интересующих поднесущих, например, как показано в Уравнении (2), для получения соответствующей матрицы формирования диаграммы направленности. Процессор 978 может формировать информацию обратной связи для матриц канала или (несжатые или сжатые) матрицы формирования диаграммы направленности. Процессор 978 может выдавать информацию обратной связи контроллеру/процессору 980 для отправки обратно точке 110 доступа. Процессор 978 также может выводить матрицу пространственной фильтрации для каждой поднесущей или каждой группы интересующих поднесущих на основе соответствующей матрицы канала и/или матрицы формирования диаграммы направленности. Процессор 978 может выдавать матрицы пространственной фильтрации пространственному процессору 960 приема для пространственной согласованной фильтрации нисходящей линии связи.
Обработка для восходящей линии связи может быть такой же или отличающейся от обработки для нисходящей линии связи. Информационные данные из источника 986 данных и/или другие данные (например, информация обратной связи) из контроллера/процессора 980 могут быть обработаны (например, закодированы, подвергнуты чередованию и модулированы) посредством процессора 988 данных передачи и далее мультиплексированы с обучающими символами и пространственно обработаны посредством пространственного процессора 990 передачи с помощью направляющих матриц восходящей линии связи. Выходные символы от пространственного процессора 990 передачи могут быть затем обработаны посредством модуляторов 954a-954r для формирования R сигналов восходящей линии связи, которые могут быть переданы через антенны 952a-952r.
В точке 110 доступа сигналы восходящей линии связи от станции 120 могут быть приняты антеннами 924a-924t и обработаны демодуляторами 922a-922t для получения принятых символов. Пространственный процессор 940 приема может выполнить пространственную согласованную фильтрацию над принятыми символами и выдать оценки символов данных. Процессор 942 данных приема может затем обработать оценки символов данных, выдать декодированные данные приемнику 944 данных и выдать информацию обратной связи контроллеру/процессору 930. Процессор 930 может вывести направляющие матрицы нисходящей линии связи для станции 120 на основе информации обратной связи. Информация обратной связи может быть сохранена в памяти (например, в памяти 932), которая может являться доступной и для уровня MAC, и для уровня PHY для эффективной обработки, как описано выше.
Процессор 928 канала может обработать обучающие символы, принятые от станции 120, и может оценить характеристику канала MIMO восходящей линии связи. Процессор 928 может проанализировать матрицу канала восходящей линии связи для каждой поднесущей или каждой группы интересующих поднесущих для получения соответствующей матрицы формирования диаграммы направленности. Процессор 928 также может вывести матрицу пространственной фильтрации для каждой поднесущей или каждой группы интересующих поднесущих. Процессор 928 может выдать матрицы пространственной фильтрации пространственному процессору 940 приема для пространственной согласованной фильтрации восходящей линии связи и может выдать матрицы канала или матрицы формирования диаграммы направленности контроллеру/процессору 930 для отправки обратно на станцию 120.
Контроллеры/процессоры 930 и 980 могут управлять работой в точке 110 доступа и станции 120 соответственно. Блоки 932 и 982 памяти могут хранить данные и программные коды для точки 110 доступа и станции 120 соответственно. Процессоры 928, 930, 978, 980 и/или другие процессоры могут выполнять описанные здесь процессы и функции, например, процесс 500, показанный на фиг. 5, процесс 700, показанный на фиг. 7, и т.д.
Описанные здесь методики могут быть реализованы различными средствами. Например, эти методики могут быть реализованы в аппаратном оборудовании, встроенном программном обеспечении, программном обеспечении или их комбинации. Для аппаратной реализации процессоры, используемые для выполнения методики в заданном объекте (например, передатчике или приемнике), могут быть реализованы в одном или более элементах, представляющих собой специализированные интегральные схемы (ASIC), процессоры цифровых сигналов (DSP), устройства обработки цифровых сигналов (DSPD), программируемые логические устройства (PLD), программируемые вентильные матрицы (FPGA), процессоры, контроллеры, микроконтроллеры, микропроцессоры, электронные устройства, другие электронные элементы, выполненные для выполнения описанных здесь функций, компьютер или их комбинацию.
Для реализации с помощью встроенного программного обеспечения и/или программного обеспечения методики могут быть реализованы с помощью модулей (например, процедур, функций и т.д.), которые выполняют описанные здесь функции. Команды встроенного программного обеспечения и/или программного обеспечения могут быть сохранены в памяти (например, в памяти 932 или 982 на фиг. 9) и исполняться процессором (например, процессором 930 или 980). Память может быть реализована внутри процессора или являться внешней по отношению к процессору. Команды встроенного программного обеспечения и/или программного обеспечения также могут быть сохранены на другом читаемом с помощью процессора носителе, таком как оперативное запоминающее устройство (RAM; ОЗУ), постоянное запоминающее устройство (ROM; ПЗУ), энергонезависимое оперативное запоминающее устройство (NVRAM), программируемое постоянное запоминающее устройство (PROM; ППЗУ), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM; ЭСППЗУ), флэш-память, компакт-диск (CD), магнитное или оптическое запоминающее устройство и т.д.
В одном или более иллюстративных вариантах воплощения описанные функции могут быть реализованы в аппаратном оборудовании, программном обеспечении, встроенном программном обеспечении или любой их комбинации. При программной реализации функции могут быть сохранены в виде одной или более команд или кода на машиночитаемом носителе или переданы на него. Машиночитаемые носители включают в себя компьютерные носители данных и коммуникационные носители, включающие в себя любую среду, которая способствует передаче компьютерной программы из одного места в другое. Носители данных могут представлять собой любые доступные носители, к которым может получить доступ компьютер. В качестве примера, но без ограничения, такие машиночитаемые носители могут содержать оперативное запоминающее устройство (ОЗУ; RAM), постоянное запоминающее устройство (ПЗУ; ROM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ; EEPROM), компакт-диск, предназначенный только для чтения (CD-ROM), или другой накопитель на оптическом диске, накопитель на магнитном диске или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться для переноса или хранения желаемого программного кода в виде команд или структур данных и к которому может получить доступ компьютер. Кроме того, любое соединение правильно называть машиночитаемым носителем. Например, если программное обеспечение передается с вебсайта, сервера или другого удаленного источника с использованием коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные волны, радиоволны и микроволны, то коаксиальный кабель, волоконно-оптический кабель, витая пара, линия DSL или беспроводные технологии, такие как инфракрасные волны, радиоволны и микроволны, входят в определение носителя. В настоящем документе "диск" включает в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и диск blu-ray, причем диски обычно воспроизводят данные магнитным способом или оптическим способом с помощью лазера. Комбинации упомянутого выше также должны входить в объем машиночитаемых носителей.
Предшествующее описание раскрытия дано для того, чтобы дать возможность любому специалисту в области техники осуществить или использовать раскрытие изобретения. Различные модификации этого раскрытия могут быть понятны специалистам в области техники, и определенные здесь общие принципы могут быть применены к другим вариантам без отступления от сущности или объема раскрытия изобретения. Таким образом, настоящее раскрытие изобретения не подразумевается ограниченным описанными здесь примерами и схемами, а должно получить самый широкий объем, совместимый с раскрытыми здесь принципами и новыми признаками.



Описана методика для быстрой отправки информации обратной связи для формирования диаграммы направленности. Технический результат заключается в отправке информации обратной связи для формирования диаграммы направленности с малой задержкой, насколько это возможно. Для этого передатчик/инициатор отправляет первый кадр, содержащий обучающие символы. Приемник/респондент принимает первый кадр, определяет количество времени для формирования информации обратной связи и определяет количество времени для отправки информации обратной связи. Затем приемник определяет длину второго кадра, несущего информацию обратной связи, на основе количества времени для формирования и отправки информации обратной связи. Приемник отправляет второй кадр после ожидания в течение периода короткого межкадрового промежутка (SIFS) с конца первого кадра без выполнения доступа к каналу. Приемник формирует информацию обратной связи на основе обучающих символов и отправляет информацию во втором кадре, когда она готова. Передатчик принимает второй кадр, выводит по меньшей мере одну направляющую матрицу на основе информации обратной связи и отправляет третий кадр с помощью по меньшей мере одной направляющей матрицы. 9 н.п. и 33 з.п. ф-лы, 10 ил.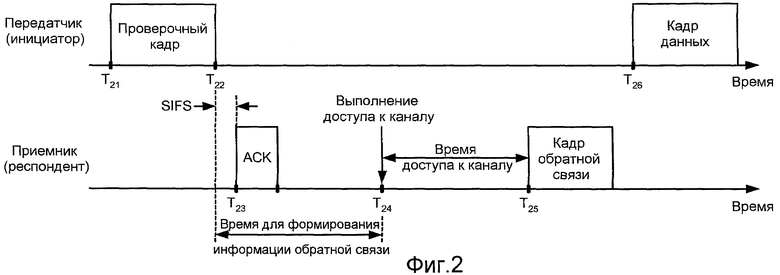
1. Устройство для обеспечения информации обратной связи для использования при осуществлении технологий формирования диаграммы направленности, содержащее:
процессор, выполненный с возможностью принимать первый кадр, содержащий обучающие символы, определять количество времени для формирования информации обратной связи на основе обучающих символов в первом кадре и отправлять второй кадр, имеющий длину, определяемую на основе по меньшей мере количества времени для формирования информации обратной связи; и
память, присоединенную к процессору, хранящую команды, чтобы побудить процессор осуществить вышеуказанные действия.
2. Устройство по п.1, в котором процессор выполнен с возможностью идентифицировать тип информации обратной связи, которая должна быть сформирована, из числа нескольких типов информации обратной связи и определять количество времени для формирования информации обратной связи на основе типа информации обратной связи, которая должна быть сформирована.
3. Устройство по п.1, в котором процессор выполнен с возможностью определять количество времени для отправки информации обратной связи и определять длину второго кадра также на основе количества времени для отправки информации обратной связи.
4. Устройство по п.3, в котором процессор выполнен с возможностью определять скорость передачи данных для второго кадра, идентифицировать тип информации обратной связи, которая должна быть отправлена, из числа нескольких типов информации обратной связи и определять количество времени для отправки информации обратной связи на основе скорости передачи данных и типа информации обратной связи, которая должна быть отправлена.
5. Устройство по п.1, в котором процессор выполнен с возможностью формировать второй кадр с первой частью, за которой следует вторая часть, первая часть имеет длину, равную количеству времени для формирования информации обратной связи или превышающую его, вторая часть несет информацию обратной связи.
6. Устройство по п.1, в котором процессор выполнен с возможностью сформировать составной блок данных протокола управления доступом к среде передачи (A-MPDU), содержащий несколько блоков MPDU, и формировать второй кадр с блоком A-MPDU.
7. Устройство по п.6, в котором процессор выполнен с возможностью формировать блок A-MPDU с первым набором из по меньшей мере одного блока MPDU, за которым следует второй набор из по меньшей мере одного блока MPDU, первый набор из по меньшей мере одного блока MPDU имеет длину, равную количеству времени для формирования информации обратной связи или превышающую его, и обеспечивать информацию обратной связи во втором наборе из по меньшей мере одного блока MPDU.
8. Устройство по п.6, в котором процессор выполнен с возможностью формировать первый блок MPDU, имеющий длину, равную количеству времени для формирования информации обратной связи или превышающую его, формировать второй блок MPDU с информацией обратной связи и формировать блок A-MPDU с первым блоком MPDU, за которым следует второй блок MPDU.
9. Устройство по п.1, в котором процессор выполнен с возможностью ожидать в течение периода короткого межкадрового промежутка (SIFS) после конца первого кадра и отправлять второй кадр после ожидания в течение периода SIFS и без выполнения доступа к каналу.
10. Устройство по п.1, в котором процессор выполнен с возможностью выводить по меньшей мере одну матрицу канала на основе обучающих символов в первом кадре и формировать информацию обратной связи на основе по меньшей мере одной матрицы канала.
11. Устройство по п.1, в котором процессор выполнен с возможностью выводить по меньшей мере одну матрицу канала на основе обучающих символов в первом кадре, выводить по меньшей мере одну матрицу формирования диаграммы направленности на основе по меньшей мере одной матрицы канала и формировать информацию обратной связи на основе по меньшей мере одной матрицы формирования диаграммы направленности.
12. Устройство по п.1, в котором информация обратной связи содержит по меньшей мере одну сжатую матрицу формирования диаграммы направленности.
13. Устройство по п.1, в котором информация обратной связи содержит информацию о состоянии канала (CSI).
14. Устройство по п.1, в котором процессор выполнен с возможностью устанавливать поле длины второго кадра к длине второго кадра.
15. Способ обеспечения информации обратной связи для использования при осуществлении технологий формирования диаграммы направленности, содержащий этапы, на которых:
принимают первый кадр, содержащий обучающие символы;
определяют количество времени для формирования информации обратной связи на основе обучающих символов в первом кадре; и
отправляют второй кадр, имеющий длину, определяемую на основе по меньшей мере количества времени для формирования информации обратной связи.
16. Способ по п.15, дополнительно содержащий этапы, на которых:
определяют количество времени для отправки информации обратной связи; и
определяют длину второго кадра также на основе количества времени для отправки информации обратной связи.
17. Способ по п.15, дополнительно содержащий этапы, на которых:
формируют второй кадр с первой частью, за которой следует вторая часть, первая часть имеет длину, равную количеству времени для формирования информации обратной связи или превышающую его, вторая часть несет информацию обратной связи.
18. Способ по п.15, в котором отправка второго кадра содержит этапы, на которых:
ожидают в течение периода короткого межкадрового промежутка (SIFS) после конца первого кадра, и
отправляют второй кадр после ожидания в течение периода SIFS и без выполнения доступа к каналу.
19. Устройство для обеспечения информации обратной связи для использования при осуществлении технологий формирования диаграммы направленности, содержащее:
средство для приема первого кадра, содержащего обучающие символы;
средство для определения количества времени для формирования информации обратной связи на основе обучающих символов в первом кадре; и
средство для отправки второго кадра, имеющего длину, определяемую на основе по меньшей мере количества времени для формирования информации обратной связи.
20. Устройство по п.19, дополнительно содержащее:
средство для определения количества времени для отправки информации обратной связи; и
средство для определения длины второго кадра дополнительно на основе количества времени для отправки информации обратной связи.
21. Устройство по п.19, дополнительно содержащее:
средство для формирования второго кадра с первой частью, за которой следует вторая часть, первая часть имеет длину, равную количеству времени для формирования информации обратной связи или превышающую его, вторая часть несет информацию обратной связи.
22. Устройство по п.19, в котором средство для отправки второго кадра содержит:
средство для ожидания в течение периода короткого межкадрового промежутка (SIFS) после конца первого кадра, и
средство для отправки второго кадра после ожидания в течение периода SIFS и без выполнения доступа к каналу.
23. Читаемый процессором носитель, хранящий команды для обеспечения информации обратной связи для использования при осуществлении технологий формирования диаграммы направленности, команды, исполняемые процессором для:
приема первого кадра, содержащего обучающие символы;
определения количества времени для формирования информации обратной связи на основе обучающих символов в первом кадре; и
отправки второго кадра, имеющего длину, определяемую на основе по меньшей мере количества времени для формирования информации обратной связи.
24. Читаемый процессором носитель по п.23, дополнительно содержащий команды, исполняемые для:
определения количества времени для отправки информации обратной связи и
определения длины второго кадра также на основе количества времени для отправки информации обратной связи.
25. Читаемый процессором носитель по п.23, дополнительно содержащий команды, исполняемые для:
формирования второго кадра с первой частью, за которой следует вторая часть, первая часть имеет длину, равную количеству времени для формирования информации обратной связи или превышающую его, вторая часть несет информацию обратной связи.
26. Устройство для обеспечения информации обратной связи для формирования диаграммы направленности, содержащее:
процессор, выполненный с возможностью отправлять первый кадр, содержащий обучающие символы, принимать второй кадр, содержащий первую часть, за которой следует вторая часть, первая часть имеет длину, определяемую количеством времени для формирования информации обратной связи приемником первого кадра, вторая часть несет информацию обратной связи, и выводить по меньшей мере одну направляющую матрицу на основе информации обратной связи, полученной из второго кадра; и
память, присоединенную к процессору, хранящую команды, чтобы побудить процессор осуществить вышеуказанные действия.
27. Устройство по п.26, в котором процессор выполнен с возможностью принимать из второго кадра составной блок данных протокола управления доступом к среде передачи (A-MPDU), содержащий первый блок MPDU для первой части и второй блок MPDU для второй части.
28. Устройство по п.26, в котором процессор выполнен с возможностью получать по меньшей мере одну матрицу канала из информации обратной связи, выводить по меньшей мере одну матрицу формирования диаграммы направленности на основе по меньшей мере одной матрицы канала и выводить по меньшей мере одну направляющую матрицу на основе по меньшей мере одной матрицы формирования диаграммы направленности.
29. Устройство по п.26, в котором процессор выполнен с возможностью получать по меньшей мере одну матрицу формирования диаграммы направленности из информации обратной связи и выводить по меньшей мере одну направляющую матрицу на основе по меньшей мере одной матрицы формирования диаграммы направленности.
30. Устройство по п.1, в котором процессор выполнен с возможностью принимать второй кадр после периода короткого межкадрового промежутка (SIFS) с конца первого кадра.
31. Устройство по п.26, в котором процессор выполнен с возможностью выполнять пространственную обработку передачи для третьего кадра на основе по меньшей мере одной направляющей матрицы и отправлять третий кадр приемнику.
32. Способ для обеспечения информации обратной связи для формирования диаграммы направленности, содержащий этапы, на которых:
отправляют первый кадр, содержащий обучающие символы;
принимают второй кадр, содержащий первую часть, за которой следует вторая часть, первая часть имеет длину, определяемую количеством времени для формирования информации обратной связи приемником первого кадра, вторая часть несет информацию обратной связи; и
выводят по меньшей мере одну направляющую матрицу на основе информации обратной связи, полученной из второго кадра.
33. Способ по п.32, в котором выведение по меньшей мере одной направляющей матрицы содержит этапы, на которых:
получают по меньшей мере одну матрицу канала из информации обратной связи,
выводят по меньшей мере одну матрицу формирования диаграммы направленности на основе по меньшей мере одной матрицы канала, и
выводят по меньшей мере одну направляющую матрицу на основе по меньшей мере одной матрицы формирования диаграммы направленности.
34. Способ по п.32, в котором выведение по меньшей мере одной направляющей матрицы содержит этапы, на которых:
получают по меньшей мере одну матрицу формирования диаграммы направленности из информации обратной связи, и
выводят по меньшей мере одну направляющую матрицу на основе по меньшей мере одной матрицы формирования диаграммы направленности.
35. Устройство для обеспечения информации обратной связи для формирования диаграммы направленности, содержащее:
средство для отправки первого кадра, содержащего обучающие символы;
средство для приема второго кадра, содержащего первую часть, за которой следует вторая часть, первая часть имеет длину, определяемую количеством времени для формирования информации обратной связи приемником первого кадра, вторая часть несет информацию обратной связи; и
средство для выведения по меньшей мере одной направляющей матрицы на основе информации обратной связи, полученной из второго кадра.
36. Устройство по п.35, в котором средство для выведения по меньшей мере одной направляющей матрицы содержит:
средство для получения по меньшей мере одной матрицы канала из информации обратной связи,
средство для выведения по меньшей мере одной матрицы формирования диаграммы направленности на основе по меньшей мере одной матрицы канала, и
средство для выведения по меньшей мере одной направляющей матрицы на основе по меньшей мере одной матрицы формирования диаграммы направленности.
37. Устройство по п.35, в котором средство для выведения по меньшей мере одной направляющей матрицы содержит:
средство для получения по меньшей мере одной матрицы формирования диаграммы направленности из информации обратной связи, и
средство для выведения по меньшей мере одной направляющей матрицы на основе по меньшей мере одной матрицы формирования диаграммы направленности.
38. Читаемый процессором носитель, хранящий команды для обеспечения информации обратной связи для формирования диаграммы направленности, команды, исполняемые процессором для:
отправки первого кадра, содержащего обучающие символы;
приема второго кадра, содержащего первую часть, за которой следует вторая часть, первая часть имеет длину, определяемую количеством времени для формирования информации обратной связи приемником первого кадра, вторая часть несет информацию обратной связи; и
выведения по меньшей мере одной направляющей матрицы на основе информации обратной связи, полученной из второго кадра.
39. Устройство для обеспечения информации обратной связи для использования при осуществлении технологий формирования диаграммы направленности, содержащее:
процессор, выполненный с возможностью принимать первый кадр, запрашивающий информацию обратной связи для формирования диаграммы направленности, выбирать один из нескольких типов преамбулы и отправлять второй кадр с преамбулой выбранного типа и включающий в себя информацию обратной связи; и
память, присоединенную к процессору, хранящую команды, чтобы побудить процессор осуществить вышеуказанные действия.
40. Устройство по п.39, в котором процессор выполнен с возможностью определять тип кадра первого кадра на основе преамбулы для первого кадра и выбирать тип преамбулы для второго кадра на основе типа кадра первого кадра.
41. Устройство по п.39, в котором процессор выполнен с возможностью определять количество времени для формирования информации обратной связи на основе обучающих символов в первом кадре и выбирать тип преамбулы для второго кадра на основе количества времени для формирования информации обратной связи.
42. Устройство по п.39, в котором процессор выполнен с возможностью выбирать преамбулу смешанного режима или преамбулу «зеленое поле» для второго кадра.
| ADRIAN STEPHENS, SEAN COFFEY: «IEEE P 802.11 Wireless LANs; Joint Proposal: High throughput extension to the 802.11; Standard: MAC», IEEE P802.11-05/1095R5, 01.01.2006, стр.1-101, размещен в Интернете по адресу: http://users.ece.utexas.edu/~rdaniels/11n_mac_spec.pdf | |||
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ БАЗОВОЙ СТАНЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2237379C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

