Изобретение относится к силоизмерительной технике и может быть использовано при изготовлении весоизмерительных приборов.
Известен датчик силы, содержащий жесткие силопередающие элементы, соединенные упругой частью устройства в виде двух балочек с утонениями на концах, образующими упругие шарниры и измерительной перемычкой с тензорезисторами, при этом средняя часть перемычки выполнена в виде кольцеобразного упругого элемента, размещенного в плоскости действия силы с внутренней цилиндрической поверхностью, для размещения тензорезисторов. Стенки кольцеобразного упругого элемента в зонах размещения тензорезисторов выполнены переменной толщины, которые образованы пересекающимися отверстиями с различными координатами (см. описание к патенту №2308010,6, МПК G01L 1/22).
Недостатком аналога является сложность изготовления.
Известен датчик силы, содержащий корпус в виде параллелограмма с полостью в боковой стенке, в которой размещена упругая балка с пьезопластинами и генератор. Поперечная полость корпуса выполнена из центрального и двух пересекающих его симметрично расположенных сквозных боковых отверстий, диаметр которых больше диаметра центрального отверстия. В центральном отверстии вертикально расположена упругая балка, которая имеет сегментальные выемки, образованные отверстиями. Пьезоэлементы расположены на балке под углом 45 градусов к продольной оси корпуса. Точка пересечения их осей совпадает с центром отверстия. Боковые отверстия с верхней и нижней гранями корпуса образуют упругие шарниры (см. описание к патенту 2130593,6, МПК G01L 1/16, 1/22).
Этот датчик принят за прототип по наибольшему числу существенных признаков.
Недостатками конструкции прототипа является: во-первых, сложность изготовления из-за необходимости выполнения трех отверстий в боковой стенке и шлифования поверхности под наклейку тензорезисторов, а эта поверхность в прототипе - плоское дно глухого центрального отверстия, следовательно, необходимо торцевое шлифование, причем - с двух сторон, следовательно, необходима переустановка детали с поворотом; во-вторых, низкая чувствительность датчика из-за того, что измерение главных напряжений в прототипе производится на нейтральной оси под углом 45 градусов к ней, и они равны максимальным касательным напряжениям в этом сечении, допустимый уровень которых в 1,67 раза меньше допустимого уровня нормальных напряжений, вследствие чего измеряемые деформации в прототипе занижены в 1,67 раз.
Задачей настоящего изобретения является упрощение конструкции, снижение трудоемкости изготовления и повышение чувствительности датчика силы.
Для решения поставленной задачи в тензометрическом датчике силы, содержащем корпус в виде параллелограмма, образованного верхней и нижней гранями и двумя сквозными поперечными отверстиями с упругой перемычкой - чувствительным элементом между ними, тензорезисторы размещены в зонах максимальных деформаций на прилегающих поверхностях отверстий выше и ниже нейтральной оси корпуса датчика. Расстояние между отверстиями, являющееся толщиной перемычки, - чувствительного элемента рассчитывается таким образом, чтобы уровень измеряемых деформаций, возникающих при нагружении датчика, соответствовал техническим характеристикам тензорезисторов. С целью увеличения зон равномерного распределения напряжений (деформаций) в местах наклейки тензорезисторов в боковых стенках перемычки - чувствительного элемента выше и ниже нейтральной оси корпуса датчика выполнены пазы.
Упрощение конструкции и снижение трудоемкости изготовления достигается за счет того, что в предлагаемом решении боковая полость выполнена только двумя сквозными поперечными отверстиями - исключено третье центральное глухое отверстие. Кроме этого снижение трудоемкости достигается за счет того, что требуемые измерительные деформации получены на прилегающих поверхностях двух сквозных поперечных отверстий, выполненных в виде цилиндров. А внутреннее цилиндрическое шлифование существенно технологичнее торцевого шлифования, как в прототипе, и не требует переустановки детали.
Увеличение чувствительности датчика достигается за счет того, что тензорезисторы измеряют деформации при максимальных нормальных изгибных напряжениях, допустимый уровень которых в 1,67 раза выше допустимого уровня напряжений при определении максимальных касательных напряжений от сдвига, как в прототипе. Вышесказанное подтверждается формулой:
σ1=τmax ≤ [τ]=0,6[σ]=0,6σв/3
σmax ≤ [σ]=σв/3 таким образом, σ1<σmax в 1,67 раза, где
σ1 - главное напряжение;
[σ] - допустимый уровень нормальных напряжений;
τmax - максимальное касательное напряжение;
[τ] - допустимый уровень касательных напряжений;
σв - напряжение, при котором происходит разрушение образца.
Сущность изобретения поясняется следующими чертежами:
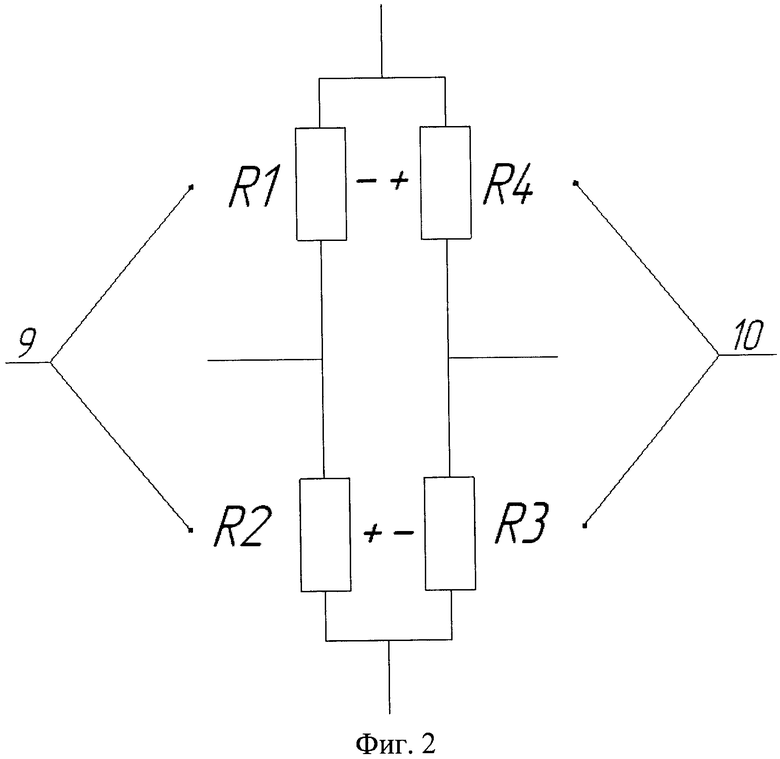
на фиг.1 изображен датчик силы, содержащий корпус 1 в виде параллелограмма, силопередающие элементы 2 и 3, соединенные упругой параллелограммной системой, образованной в корпусе 1 двумя сквозными поперечными отверстиями 4 и гранями, верхней 5 и нижней 6. Упругая перемычка между отверстиями является чувствительным элементом 7. На прилегающие цилиндрические поверхности отверстий, образующие чувствительный элемент 7 выше и ниже нейтральной оси корпуса 8, - в верхних деформируемых зонах наклеены тензорезисторы 9, а ниже - в нижних аналогичных зонах - тензорезисторы 10. Для удлинения зон с равномерным распределением деформаций в боковых стенках чувствительного элемента 7 выполнены пазы 11 и 12, которые «утоняют» чувствительный элемент 7 в его малонапряженных зонах для поднятия в них напряжений (уровней деформаций);
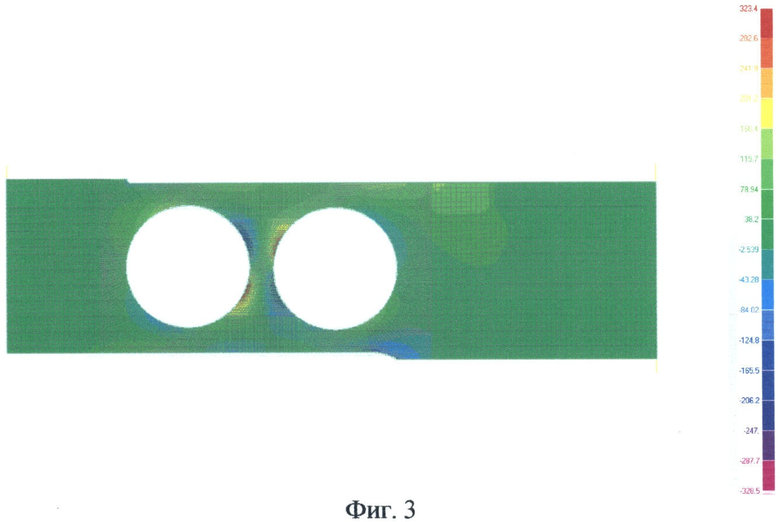
на фиг.2 - схема соединения тензорезисторов 9 и 10;
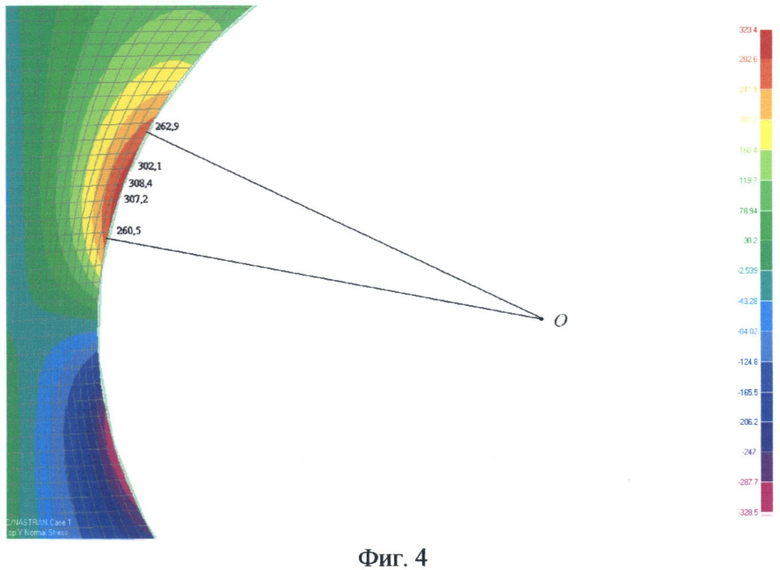
на фиг.3 - распределение напряжений в расчетной модели датчика, полученное методом конечных элементов с помощью специальной программы;
на фиг.4 - фрагмент фиг.3 с указанием величин напряжений в узлах расчетной модели датчика, расположенных в зоне наклейки одного из тензорезисторов.
Датчик работает следующим образом.
При действии силы Р силопередающий элемент 1 перемещается в направлении силы и происходит поворот перемычки - чувствительного элемента 7. В результате чего на прилегающих поверхностях сквозных отверстий 4 выше и ниже нейтральной оси 8 корпуса 1 возникают деформации сжатия и растяжения, которые соответственно изменяют сопротивления тензорезисторов. Разнополярные деформации позволяют соединить тензорезисторы 9 и 10 по схеме полного дифференциального моста (фиг.2), отличающегося высокой чувствительностью преобразования деформаций в электрическое напряжение.
Благодаря тому, что передача усилий на чувствительный элемент 7 происходит в зоне нейтральной оси 8 корпуса 1 устройства, зависимость от внешних паразитных моментов минимизирована. Кроме того, тензорезисторы R1 и R2, размещенные в верхней части, и тензорезисторы R3 и R4, расположенные в нижней части, включены в одни и те же плечи моста, что дополнительно компенсирует остаточное влияние деформаций от внешнего момента на результат измерений.
За счет того, что тензорезисторы размещены в зонах с равномерным распределением деформаций по длине измерительной решетки, достигается максимальный коэффициент преобразования механических деформаций в изменение сопротивлений.
Применение предлагаемого датчика в производстве позволит обеспечить высокую точность измерения усилий. На предлагаемый датчик разработана конструкторская документация, изготовлены и успешно испытаны опытные образцы на номиналы измеряемых усилий от 150 кг до 7000 кг. Общая погрешность измерения не превышает 0,02%, нелинейность - не более 0,01%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2004 |
|
RU2308010C2 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ УСИЛИЙ | 2001 |
|
RU2175117C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ УСИЛИЙ | 2009 |
|
RU2404415C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
| Чувствительный элемент | 2016 |
|
RU2629918C1 |
| Устройство для измерения динамических нагрузок Поляковского Л.Ю. | 1982 |
|
SU1237920A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2010 |
|
RU2423677C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1998 |
|
RU2166741C2 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2815576C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2012 |
|
RU2498242C1 |
Изобретение относится к силоизмерительной технике и может быть использовано при изготовлении весоизмерительных приборов. Техническим результатом является упрощение конструкции, снижение трудоемкости изготовления и повышение чувствительности устройства. Тензометрический датчик силы содержит корпус в виде параллелограмма, образованного верхней и нижней гранями и двумя сквозными поперечными отверстиями с перемычкой - чувствительным элементом между ними, и тензорезисторы. Тензорезисторы размещены в зонах максимальных деформаций на прилегающих поверхностях отверстий выше и ниже нейтральной оси корпуса. 1 з.п. ф-лы, 4 ил.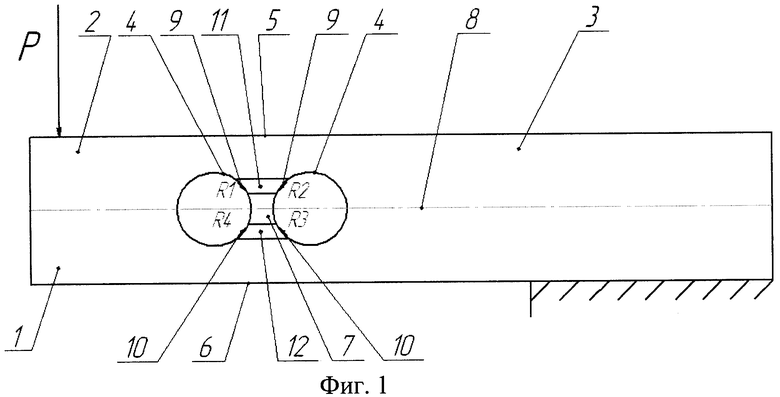
1. Тензометрический датчик силы, содержащий корпус в виде параллелограмма, образованного верхней и нижней гранями и двумя сквозными поперечными отверстиями с перемычкой - чувствительным элементом между ними, и тензорезисторы, отличающийся тем, что тензорезисторы размещены в зонах максимальных деформаций на прилегающих поверхностях отверстий выше и ниже нейтральной оси корпуса.
2. Датчик по п.1, отличающийся тем, что чувствительный элемент выполнен с пазами в боковых стенках выше и ниже нейтральной оси корпуса.
| ДАТЧИК СИЛЫ | 1997 |
|
RU2130593C1 |
| JP 7083766 A, 31.03.1995 | |||
| "Тензометрический датчик силы "Ринта" | 1990 |
|
SU1820245A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2004 |
|
RU2308010C2 |
| JP 11201839 A, 30.07.1999 | |||
| JP 60211329 A, 23.10.1985. | |||

