Изобретение относится к области сейсмологии и может найти применение в национальных системах наблюдений и обработки данных измерений для прогнозирования землетрясений.
Основной проблемой при прогнозировании землетрясений является обнаружение и измерение достоверных, устойчивых признаков-предвестников. Среди краткосрочных устойчивых предвестников выявлено явление раскачки очага землетрясения, сопровождаемое распространением от гипоцентра очага сверхнизкочастотных литосферных волн [см., например, Научное открытие №365 «Явление раскачки очага землетрясения перед сейсмическим ударом». Бюллетень, Научные открытия, 2009 г., РАЕН, М., Санкт-Петербург, стр.66-68].
Известно техническое решение «Способ предсказания землетрясений», Патент RU №2170446, 2001 г., - аналог, в котором осуществляют измерения сверхнизкочастотных литосферных волн раскачки очага землетрясения средствами GPS.
В способе-аналоге размещают в сейсмоопасном районе приемные станции космической навигационной системы, разнесенные на протяженной измерительной базе, осуществляют непрерывное высокоточное измерение координат (xi, yi, zi) точек размещения приемных станций, регистрируют момент появления периодических отклонений Δxi, Δyi, Δzi, координат точек и отслеживают изменения этих отклонений во времени, вычисляют гипотетический фазовый центр волн как точку пересечения радиус-векторов в пространстве, длину и направляющие косинусов которых определяют из соотношений:
дл. 
и отождествляют его с центром очага, а время удара (tx), отсчитываемое от момента появления периодических отклонений координат точек и магнитуду (М) ожидаемого землетрясения вычисляют на основе регрессионных зависимостей:
где Т - период отклонения координат, ч; dekr - натуральный логарифм отношения амплитуд отклонения координат двух смежных периодов; d, l - коэффициенты регрессии.
Недостатками аналога следует считать:
- неадекватность регрессионных зависимостей измеряемому физическому процессу, поскольку измеряемый период отклонения координат (Т) изменяется во времени;
- существенный интервал нечувствительности системы GPS, ограниченной среднеквадратической ошибкой измерений в десятки сантиметров, что сокращает время упреждающего прогноза;
- недостоверность определения координат центра сейсмического удара, поскольку последний, как правило, не совпадает с фазовым центром литосферных волн.
Считается, что литосферные волны, распространяющиеся от очага подготавливаемого землетрясения, служат «спусковым крючком» для возникновения симметричных акустических волн электронной концентрации в ионосфере [см., например, «Краткосрочный прогноз катастрофических землетрясений с помощью радиофизических наземно-космических методов», Доклады конференции, ОИФЗ им. О.Ю. Шмидта, РАН, М., 1998 г., Ионосферные предвестники землетрясений, стр.26-32]. Ближайшим аналогом является «Способ предсказания землетрясений». Патент RU №2120647, 1998 г., путем измерения волн ионосферной плазмы.
В способе ближайшего аналога сканируют область ионосферы над контролируемым участком поверхности Земли лучом диаграммы направленности антенны, используют совмещенный тракт приема-передачи на основе СВЧ-автогенератора в режиме автомодуляции генерируемых колебаний отраженным сигналом на длине волны, большей Дебаевского радиуса экранирования в плазме, осуществляют выделение модулирующей функции путем частотного детектирования сигнала автогенератора и ее дискретизацию по амплитуде и времени, формируют кадр m(x, y) цифровых отсчетов модулирующей функции от пространственных координат (x, y) для каждого цикла сканирования, вычисляют энергетический спектр и автокорреляционную функцию сигнала предвестника землетрясения и по параметрам сигнала, их изменению от кадра к кадру и времени существования судят о магнитуде и времени ожидаемого землетрясения.
К недостаткам ближайшего аналога следует отнести:
- неопределенность прогноза центра ожидаемого сейсмического удара, поскольку пространственная протяженность ионосферных волн составляет тысячи километров;
- отсутствие количественных зависимостей между параметрами регистрируемой модулирующей функции и характеристиками ожидаемого сейсмического удара.
Задача, решаемая изобретением, состоит в повышении достоверности и точности определения параметров сейсмического удара, увеличении интервала времени упреждающего прогноза о предстоящем землетрясении путем использования высокочувствительной фазометрической системы из взаимно синхронизированных автогенераторов в режиме затягивания частоты.
Поставленная задача решается тем, что в способе краткосрочного прогнозирования землетрясения используют автодинные измерители в режиме взаимной синхронизации, размещенные на протяженных взаимно ортогональных и равных измерительных базах, сигнал признака-предвестника выделяют путем частотного детектирования несущей частоты автогенераторов, вектор направления движения (R) литосферной волны при раскачке очага рассчитывают через его проекции на ортогональных базах дл.  отслеживают изменение длины вектора R и закономерность изменения периода колебаний амплитуды результирующего сигнала о времени через производную T≈dT/dt·t, получают функцию распределения вероятности землетрясения от относительного изменения периода
отслеживают изменение длины вектора R и закономерность изменения периода колебаний амплитуды результирующего сигнала о времени через производную T≈dT/dt·t, получают функцию распределения вероятности землетрясения от относительного изменения периода  , рассчитывают время существования признака-предвестника, как
, рассчитывают время существования признака-предвестника, как  , определяют магнитуду удара как lgty(суm)=0,54М-3,37, в соответствии с ориентацией измерительных баз наносят линию вектора движения на карту местности, а вероятность центра сейсмического удара на линии в окрестностях точек расчетных длин вектора, стремящихся к нулю, определяют по плотности распределения вероятностей
, определяют магнитуду удара как lgty(суm)=0,54М-3,37, в соответствии с ориентацией измерительных баз наносят линию вектора движения на карту местности, а вероятность центра сейсмического удара на линии в окрестностях точек расчетных длин вектора, стремящихся к нулю, определяют по плотности распределения вероятностей
.
Изобретение поясняется чертежами, где
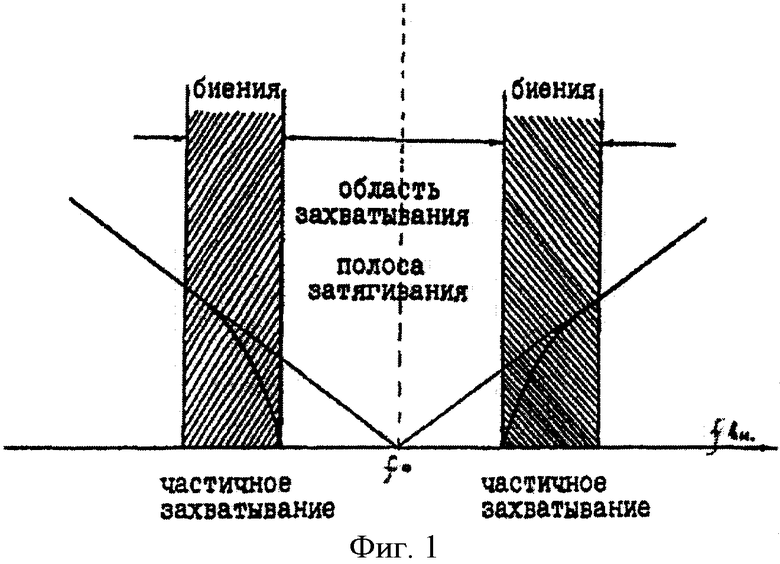
фиг.1 - синхронизация частоты автогенератора в режиме затягивания внешним сигналом;
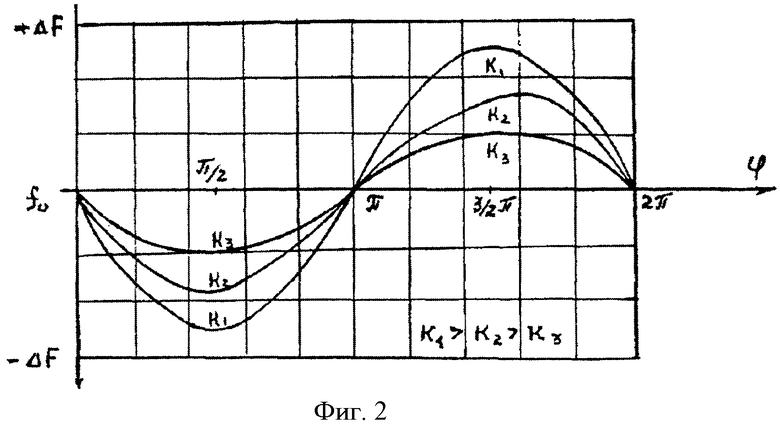
фиг.2 - семейство кривых затягивания частоты автогенератора;
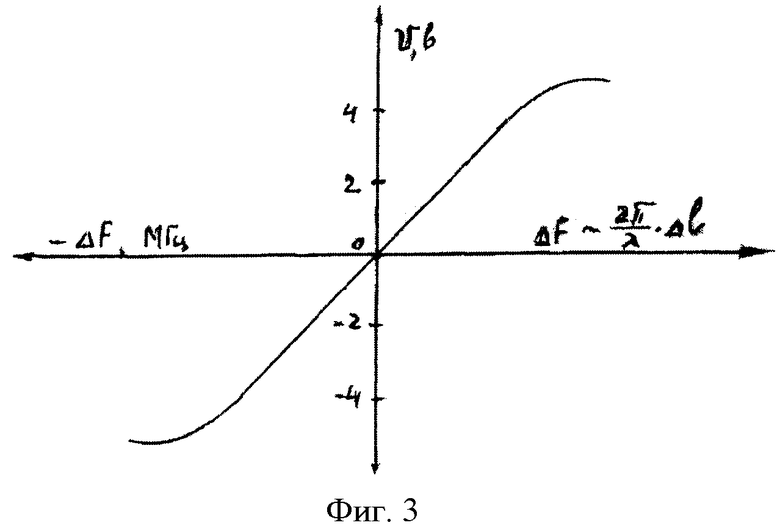
фиг.3 - выходная характеристика частотного детектора;
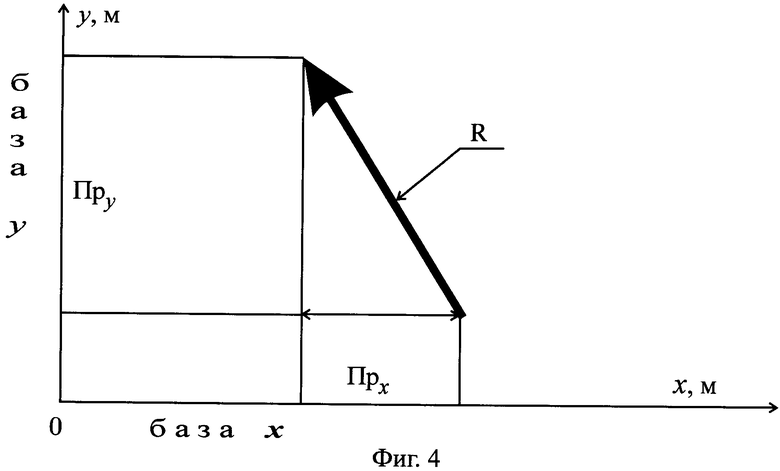
фиг.4 - вектор направления движения литосферной волны при раскачке очага землетрясения;
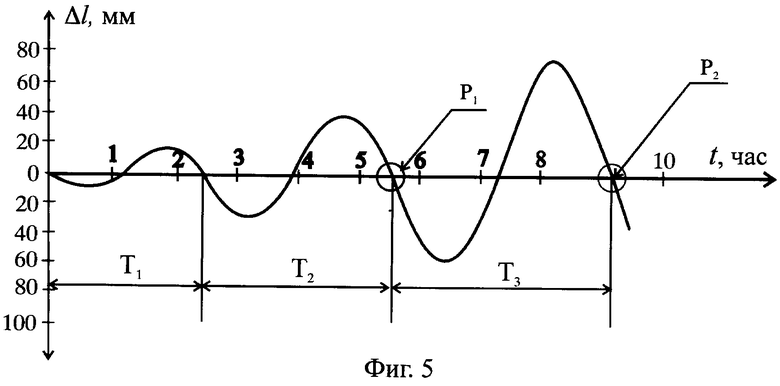
фиг.5 - изменение периода Т и амплитуды (длины вектора R) регистрируемой литосферной волны во времени;
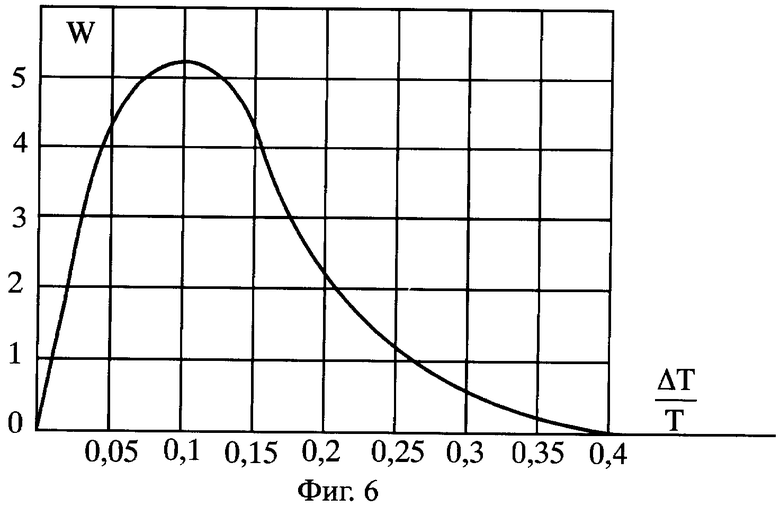
фиг.6 - плотность вероятности землетрясения от относительного изменения периода  ;
;
фиг.7 - функциональная схема устройства, реализующего способ.
Техническая сущность изобретения состоит в следующем. В качестве устойчивого признака-предвестника, согласно аналогу, измерению подлежат литосферные волны раскачки очага землетрясения. Сама по себе раскачка очага представляет собой переходный процесс от исходного литостатического состояния к сейсмическому удару. Направление распространения (фазовый фронт) литосферных волн, период колебаний и изменение их амплитуды содержат всю информацию о параметрах ожидаемого сейсмического удара. Для расширения интервала времени упреждающего прогноза о землетрясении необходима высокая чувствительность измерительных средств, чтобы зарегистрировать само начало переходного процесса. В этом отношении средства GPS способа-аналога имеют существенный интервал нечувствительности, определяемый среднеквадратической ошибкой измерений. Для системы GPS - это десятки сантиметров, для системы ГЛОНАСС ошибка определения координат на данный момент составляет порядка одного метра.
В качестве высокочувствительного измерителя в заявляемом способе используют фазометрическую радиоволновую систему на базе автогенераторов в режиме затягивания частоты с точностью измерений изменения длины базы - десятые доли миллиметра. Под затягиванием частоты автогенератора понимается зависимость частоты генерируемых колебаний от фазы отраженной волны. В режиме затягивания частоты достигается совмещение приемного и передающего трактов. Такие системы получили название автодинных. В автодинных системах автогенератор и объект образуют квазиединую колебательную систему, содержащую переменный параметр в виде изменения параметров среды или меняющегося расстояния между ними.
Воздействие внешнего электромагнитного поля с частотой fв на автогенератор с частотой f0, в некоторой полосе частот ΔF=fв-f0, называемой полосой захвата, приводит к изменению генерируемой автогенератором частоты. На начальном этапе процесс захвата характеризуется биениями между частотой внешнего сигнала и автогенератора, а затем, если автогенератор находится в режиме затягивания частоты, наступает синхронизация генерируемых автогенератором колебаний частотой внешнего сигнала f0=fв. Процесс синхронизации колебаний автогенератора внешним сигналом характеризуется фиг.1 [см., например, «Справочник по радиоэлектронике, т.2, под редакцией А.А.Куликовского. - М., Энергия, 1968 г., «Затягивание частоты автогенераторов», стр.32-34, рис.12.50]. При теоретическом анализе явления затягивания частоты используют аналитическое выражение:

где f0 - частота колебаний генератора при согласованной нагрузке;
К, φ - модуль и фаза коэффициента отражения;
ΔF - коэффициент затягивания частоты, паспортная характеристика электронного прибора [см., например, Бычков С.И., Буренин Н.И., Сафаров Р.Т. «Стабилизация частоты генераторов СВЧ». - М.: Сов. Радио, 1962 г., стр.73-83].
На фиг.2 представлено семейство кривых затягивания частоты твердотельного генератора СВЧ, выполненного на туннельном диоде Ганна Ф225 с коэффициентом затягивания ΔF=50 МГц.
В радиолинии амплитуда волны убывает обратно пропорционально расстоянию до объекта, поэтому получить амплитуду отраженной волны, соизмеримой с падающей, невозможно. При малых значениях коэффициента отражения |K|<<1 приближенное значение для девиации частоты автогенератора примет вид:
где Рв - мощность сигнала внешнего синхронизирующего генератора,
 - фаза расстройки между частотами синхронизированных автогенераторов, зависящая от длины измерительной базы между ними l.
- фаза расстройки между частотами синхронизированных автогенераторов, зависящая от длины измерительной базы между ними l.
Таким образом, при возникновении литосферных волн раскачки очага землетрясения будет изменяться длина базы l между двумя закрепленными на местности антеннами автогенераторов. Поскольку генераторы находятся в режиме синхронизации, то последнее вызовет девиацию частоты Δf, которая может быть выделена при частотном детектировании. При выборе рабочей точки на кривых затягивания (фиг.2) в области (π) изменение длины базы (Δl) вызовет линейное изменение девиации частоты Δf синхронизированных автогенераторов и линейное изменение напряжения на выходе частотного детектора, как это иллюстрировано графиком на фиг.3.
Известно, что вектор скорости перпендикулярен фазовому фронту волны в любой ее точке. Проекции радиуса вектора переноса энергии волной на оси координат (x, y) несут информацию о положении радиус-вектора в пространстве и, соответственно, о гипоцентре источника волн.
Известно также [см., например, Корн Г., Корн Т. «Справочник по математике для научных работников и инженеров», перевод с англ., раздел «Аналитическая геометрия», стр.73-74], что положение радиус-векторов в пространстве (в частности на плоскости поверхности Земли) полностью определяется косинус-направляющими (cosα, cosβ), для которых справедливо cos2α+cos2β=1. Из аналитической геометрии известно, что в прямоугольной системе координат косинус-направляющая вектора равна отношению его проекции (Пр) на данную ось к длине вектора. Длина вектора находится как корень квадратный из суммы квадратов его проекций:
дл. 
Таким образом, осуществляя частотное детектирование сигналов автогенераторов, напряжение на выходе детекторов которых пропорционально изменению длины соответствующих баз, определяют положение радиус-векторов в пространстве. Фазовый центр волн находят как точку пересечения соответствующих векторов. Положение радиус-вектора в пространстве, определенное его проекциями, иллюстрируется на фиг.4.
Реально измеренные средствами GPS литосферные волны раскачки очага перед землетрясением на полигоне МЧС «Кавказские Минеральные воды» 21.12.95 иллюстрируются графиком на фиг.5 (см. способ-аналог). Кроме направления распространения в пространстве литосферная волна характеризуется периодом (Т) и амплитудой, которые увеличиваются во времени. В частности, при длине базы 50 км способа-аналога, максимальное отклонение Δl составило 140 мм на базе, равной 16 км, Δl≈20 мм. Отклонения Δl зависят также от ориентации баз относительно вектора раскачки. Одновременно период колебаний (фиг.5) изменялся от 3 до 4,5 ч.
Известно соотношение Гуттенберга-Рихтера, в соответствии с которым магнитуда предстоящего удара связана с временем существования предвестника как lgty(сут)=0,54 M-3,37.
В процессе раскачки очага землетрясения изменяется масса земной коры, вовлекаемой в колебания. Скорость изменения консолидированной массы земной коры очага землетрясения зависит от скорости дегазации литосферы, характеристик разломной зоны, структуры земной коры, в общем, является величиной неизмеряемой. Измеряемой величиной является период колебаний (Т) изменения амплитуды сигнала во времени.
В первом приближении закономерность изменения периода колебаний во времени T(t) определялась через производную Т≈dT/dt·t. Производная рассчитывалась численным методом по приращениям. Откуда время существования переходного сейсмического процесса
 , где Тmax - максимальный период колебаний консолидированной массы очага в конце переходного процесса, при котором происходит разрыв земной коры вследствие динамического напора колебательной массы. Плотность распределения вероятности землетрясения от относительного изменения периода колебаний иллюстрируется графиком на фиг.6 [см., например, патент RU №2377602, 2009 г. «Способ определения параметров сейсмического удара»]. Из графика на фиг.6 следует, что вероятность землетрясения быстро возрастает при увеличении относительной величины
, где Тmax - максимальный период колебаний консолидированной массы очага в конце переходного процесса, при котором происходит разрыв земной коры вследствие динамического напора колебательной массы. Плотность распределения вероятности землетрясения от относительного изменения периода колебаний иллюстрируется графиком на фиг.6 [см., например, патент RU №2377602, 2009 г. «Способ определения параметров сейсмического удара»]. Из графика на фиг.6 следует, что вероятность землетрясения быстро возрастает при увеличении относительной величины  , достигая Р~0,9 при
, достигая Р~0,9 при  ~0,2. Из механики известно, что движущееся тело имеет свойство сохранения плоскости движения. Каждый раз в зоне подготавливаемого землетрясения из-за асимметрии приложения комбинации различных сил вектор движения раскачки очага может иметь случайное направление. Но, возникнув однажды, он сохраняет только одну плоскость вплоть до сейсмического удара. Поэтому центр сейсмического удара, как правило, находится на линии вектора движения, в окрестностях точек расчетной длины вектора, стремящейся к нулю, как это иллюстрируется графиком литосферной волны на фиг.5.
~0,2. Из механики известно, что движущееся тело имеет свойство сохранения плоскости движения. Каждый раз в зоне подготавливаемого землетрясения из-за асимметрии приложения комбинации различных сил вектор движения раскачки очага может иметь случайное направление. Но, возникнув однажды, он сохраняет только одну плоскость вплоть до сейсмического удара. Поэтому центр сейсмического удара, как правило, находится на линии вектора движения, в окрестностях точек расчетной длины вектора, стремящейся к нулю, как это иллюстрируется графиком литосферной волны на фиг.5.
Пример реализации способа.
Заявленный способ может быть реализован по схеме на фиг.7. Функциональная схема устройства содержит две пары автодинных измерителей 1, 2 и 3, 4, размещенных на взаимно ортогональных базах (база x, база у). Каждая пара измерителей находится в режиме взаимной синхронизации генерируемой частоты посредством радиоканалов 5 и 6 соответственно. Ведущие измерители 1, 4 содержат последовательно подключенные рупорную антенну 7, волноводный тракт 8, фазовращатель в волноводе 9, аттенюатор в волноводе 10, направленный ответвитель в волноводе 11, СВЧ-автогенератор в режиме затягивания частоты 12. Часть энергии сигнала из волновода 8 через направленный ответвитель 11 отбирается в тракт обработки, содержащий детекторную секцию 14 из объемного резонатора на отрезке волновода и частотного детектора. Для выбора режима работы частотного детектора служит аттенюатор 13. Сигнал с выхода детекторной секции 14 оцифровывают аналогово-цифровым преобразователем 15 и записывают в устройство ввода 16 персонального компьютера 17 в стандартном наборе элементов: процессора 18, оперативно-запоминающего устройства 19, винчестера 20, дисплея 21, принтера 22, клавиатуры 23. На устройство ввода 16 поступает аналогичный измерительный сигнал базы (у) с измерителя 4. Результаты обработки сигналов-предвестников выводят на сайт сети «Интернет» 24.
Устройство работает следующим образом. В исходном состоянии осуществляют фазирование системы измерителей. Посредством фазовращателя 9 и аттенюатора 10 выбирают рабочую точку на кривой затягивания (фиг.2) СВЧ-автогенератора 12 таким образом, чтобы выходное напряжение частотного детектора равнялось нулю в каждом из ортогональных трактов измерений. При возникновении в литосфере продольных волн периодических растяжений и сжатий изменяется расстояние l базы между закрепленными на местности антеннами измерителей. Приращение длины базы на Δl эквивалентно фазовому сдвигу между генераторами, находящимися в режиме взаимной синхронизации,
 . Изменение фазы на Δφ вызовет девиацию несущей частоты (f0±Δf) и появление сигнала, предвестника на выходе частотного детектора (фиг.3). При равных длинах измерительных баз сигналы на выходе ортогональных каналов пропорциональны проекциям вектора литосферных волн, как это иллюстрируется на фиг.4. После появления сигналов в измерительных трактах осуществляют непрерывную во времени запись амплитуды результирующего сигнала (длина результирующего вектора), как это иллюстрируется графиком фиг.5. По характеристикам регистрируемого сигнала прогнозируют параметры ожидаемого сейсмического удара. Из графика на фиг.5 максимальный период колебаний Тmax~3,5 ч, а средняя величина производной dT/dt~0,06. Откуда время существования предвестника ty≈3,5/0,006≈58 ч=2,34 сут. Ожидаемая магнитуда удара lg(ty=2,34)=0,54М-3,37, М≈7,5 балла.
. Изменение фазы на Δφ вызовет девиацию несущей частоты (f0±Δf) и появление сигнала, предвестника на выходе частотного детектора (фиг.3). При равных длинах измерительных баз сигналы на выходе ортогональных каналов пропорциональны проекциям вектора литосферных волн, как это иллюстрируется на фиг.4. После появления сигналов в измерительных трактах осуществляют непрерывную во времени запись амплитуды результирующего сигнала (длина результирующего вектора), как это иллюстрируется графиком фиг.5. По характеристикам регистрируемого сигнала прогнозируют параметры ожидаемого сейсмического удара. Из графика на фиг.5 максимальный период колебаний Тmax~3,5 ч, а средняя величина производной dT/dt~0,06. Откуда время существования предвестника ty≈3,5/0,006≈58 ч=2,34 сут. Ожидаемая магнитуда удара lg(ty=2,34)=0,54М-3,37, М≈7,5 балла.
Максимальный напор колебательной массы, соответствующий максимальным разрывным деформациям земной коры приходится на точки (график на фиг.5), где скорость колебаний максимальна, т.е. это точки, где кривая колебательного процесса пересекает ось t. В частности, для точки (P1) отношение составляет  , вероятность землетрясения 0,78. Для точки (Р2) отношение
, вероятность землетрясения 0,78. Для точки (Р2) отношение  , вероятность землетрясения 0,94. Соотнося соответствующие точки максимального динамического напора колебательной массы с их координатами на местности, определяют вероятность центра сейсмического удара на линии вектора движения литосферных волн. Все элементы устройства выполнены по известным электронным схемам и на существующей элементной базе. В частности, элементы автодинного измерителя выполнены по схеме [см., например, В.Ф.Давыдов, Землетрясения. Телеметрия предвестников. Монография, изд. МГУЛ. - М.: 2001 г., стр.37, Схема лабораторной установки «Рифма», рис.21]. Поскольку чувствительность автодинных измерителей по измерению приращения расстояния Δl составляет порядка десятых долей мм, то эффективность заявленного способа по точности прогнозируемых параметров превосходит известные аналоги.
, вероятность землетрясения 0,94. Соотнося соответствующие точки максимального динамического напора колебательной массы с их координатами на местности, определяют вероятность центра сейсмического удара на линии вектора движения литосферных волн. Все элементы устройства выполнены по известным электронным схемам и на существующей элементной базе. В частности, элементы автодинного измерителя выполнены по схеме [см., например, В.Ф.Давыдов, Землетрясения. Телеметрия предвестников. Монография, изд. МГУЛ. - М.: 2001 г., стр.37, Схема лабораторной установки «Рифма», рис.21]. Поскольку чувствительность автодинных измерителей по измерению приращения расстояния Δl составляет порядка десятых долей мм, то эффективность заявленного способа по точности прогнозируемых параметров превосходит известные аналоги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЙ ЦЕНТРА ОЖИДАЕМОГО СЕЙСМИЧЕСКОГО УДАРА | 2010 |
|
RU2426155C1 |
| СПОСОБ КРАТКОСРОЧНОГО ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2011 |
|
RU2458362C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СЕЙСМИЧЕСКОГО УДАРА | 2008 |
|
RU2377602C1 |
| Способ краткосрочного прогнозирования землетрясений | 2023 |
|
RU2812095C1 |
| ПОЛЯРИЗАЦИОННЫЙ ИЗМЕРИТЕЛЬ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2008 |
|
RU2439624C2 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ | 2007 |
|
RU2353957C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2004 |
|
RU2270465C1 |
| СИСТЕМА ИЗМЕРЕНИЙ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2007 |
|
RU2329525C1 |
| Способ измерения ионосферных предвестников землетрясений | 2018 |
|
RU2695080C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2004 |
|
RU2273869C1 |
Изобретение относится к области сейсмологии и может быть использовано для прогнозирования землетрясений. Сущность: измеряют литосферные волны раскачки очага землетрясения при помощи автодинных измерителей в режиме взаимной синхронизации, размещенных на взаимно ортогональных измерительных базах. При этом сигнал признака-предвестника выделяют путем частотного детектирования несущей частоты автогенераторов. Длину вектора направления движения литосферной плиты при раскачке очага рассчитывают через его проекции на ортогональных базах. Отслеживают изменение длины указанного вектора и закономерность изменения периода колебаний амплитуды результирующего сигнала во времени. Получают функцию распределения вероятности землетрясения от относительного изменения упомянутого периода. Рассчитывают время существования признака-предвестника и магнитуду удара. Затем в соответствии с ориентацией измерительных баз наносят линию вектора движения литосферной плиты на карту местности. Вероятность сейсмического удара на линии вектора определяют по плотности распределения вероятностей. Технический результат: повышение точности определения параметров сейсмического удара, увеличение времени упреждающего прогноза. 7 ил.
Способ краткосрочного прогнозирования землетрясений, в котором для измерения литосферных волн раскачки очага землетрясения используют автодинные измерители в режиме взаимной синхронизации, размещенные на протяженных взаимно ортогональных и равных измерительных базах, сигнал признака-предвестника выделяют путем частотного детектирования несущей частоты автогенераторов, длину вектора направления движения R литосферной волны при раскачке очага рассчитывают через его проекции на ортогональных базах:  отслеживают изменение длины вектора R и закономерность изменения периода колебаний амплитуды результирующего сигнала во времени через производную T≈dT/dt·t, получают функцию распределения вероятности землетрясения от относительного изменения периода W(
отслеживают изменение длины вектора R и закономерность изменения периода колебаний амплитуды результирующего сигнала во времени через производную T≈dT/dt·t, получают функцию распределения вероятности землетрясения от относительного изменения периода W( ), рассчитывают время существования признака-предвестника как , определяют магнитуду удара как lgty(сут)=0,54M-3,37, в соответствии с ориентацией измерительных баз наносят линию вектора движения на карту местности, а вероятность центра сейсмического удара на линии в окрестности точек расчетных длин вектора, стремящихся к нулю, определяют по плотности распределения вероятностей W().
), рассчитывают время существования признака-предвестника как , определяют магнитуду удара как lgty(сут)=0,54M-3,37, в соответствии с ориентацией измерительных баз наносят линию вектора движения на карту местности, а вероятность центра сейсмического удара на линии в окрестности точек расчетных длин вектора, стремящихся к нулю, определяют по плотности распределения вероятностей W().
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1997 |
|
RU2120647C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2000 |
|
RU2170446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СЕЙСМИЧЕСКОГО УДАРА | 2008 |
|
RU2377602C1 |

