ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к управлению зарядкой транспортного средства и, в частности, к управлению зарядкой транспортного средства, включающего в себя систему зарядки, которая заряжает устройство накопления энергии для приведения в движение транспортного средства электроэнергией, подаваемой из источника питания, внешнего по отношению к транспортному средству.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В последние годы электромобиль, транспортное средство с гибридным приводом, транспортное средство с приводом на топливных элементах и тому подобное привлекают внимание в качестве благоприятного для окружающей среды транспортного средства. На этих транспортных средствах установлены электродвигатель, который вырабатывает движущую силу для движения, а также устройство накопления энергии, которое накапливает электроэнергию, подаваемую на электродвигатель. Транспортное средство с гибридным приводом дополнительно имеет двигатель внутреннего сгорания, установленный на нем в качестве источника энергии, вместе с электродвигателем. Транспортное средство с приводом от топливных элементов имеет топливный элемент, установленный на нем в качестве источника питания постоянного тока (DC) для приведения в движение транспортного средства. Среди этих транспортных средств известно транспортное средство, в котором устанавливаемое на транспортном средстве устройство накопления энергии для приведения в движение транспортного средства может заряжаться от источника питания в обычных домашних хозяйствах. Например, розетка электроснабжения, установленная в доме, присоединяется к зарядному порту, предусмотренному на транспортном средстве, посредством использования кабеля для зарядки, так что электроэнергия подается из источника питания в обычных домашних хозяйствах в устройство накопления энергии. Отмечено, что транспортное средство, в котором устанавливаемое на транспортном средстве устройство накопления энергии может заряжаться от источника питания, внешнего по отношению к транспортному средству, как описано выше, также в дальнейшем будет указываться ссылкой как «подключаемое транспортное средство». Например, выложенный патент Японии № 2000-270484 (патентный документ 1) раскрывает технологию детектирования аномалии, такой как обрыв или нарушение питания электроснабжения от промышленной сети, после того как начинается зарядка на вышеизложенном подключаемом транспортном средстве.
Устройство детектирования аномалии, раскрытое в выложенном патенте Японии № 2000-270484, включает в себя электродвигатель; аккумуляторную батарею; блок преобразования, присоединенный между электродвигателем и аккумуляторной батареей, для преобразования переменного тока от промышленной сети в постоянный ток посредством электродвигателя в соответствии с сигналом переключения и подачи постоянного тока в аккумуляторную батарею; блок детектирования фазы напряжения, присоединенный между электродвигателем и промышленной сетью, для определения перехода через ноль напряжения электроснабжения от промышленной сети и детектирования фазы напряжения у напряжения промышленной сети; первый блок детектирования тока для детектирования переменного тока, протекающего через обмотку электродвигателя; второй блок детектирования тока для детектирования постоянного тока, подаваемого из блока преобразования в аккумуляторную батарею; блок выработки значения команды для формирования значения команды переменного тока на основании значения команды для зарядки, результата детектирования вторым блоком детектирования тока и фазы напряжения; блок выработки сигнала переключения для формирования сигнала переключения на основании значения команды переменного тока и результата детектирования первым блоком детектирования тока; и блок выявления аномалии для детектирования аномалии на основании значения команды переменного тока и результата детектирования первым блоком детектирования тока.
Согласно устройству детектирования аномалии, раскрытому в выложенном патенте Японии № 2000-270484, переменный ток из промышленной сети преобразуется в постоянный ток посредством электродвигателя в соответствии с сигналом переключения, и постоянный ток подается в аккумуляторную батарею. Затем определяется переход через ноль напряжения электроснабжения от промышленной сети, детектируется фаза напряжения электроснабжения от промышленной сети, и детектируются переменный ток, протекающий через обмотку электродвигателя, а также постоянный ток, подаваемый в аккумуляторную батарею. В дополнение, значение команды переменного тока формируется на основании значения команды для зарядки, результата детектирования постоянного тока и фазы напряжения. Сигнал переключения формируется на основании значения команды переменного тока и результата детектирования переменного тока. Более того, аномалия детектируется на основании значения команды переменного тока и результата детектирования переменного тока. Соответственно может детектироваться аномалия, которая возникает в устройстве управления зарядкой после того как начинается зарядка. В дополнение, поскольку не требуется ставить новый специальный датчик для детектирования аномалии, стоимость устройства детектирования аномалии может быть снижена.
Патентный документ 1: выложенный патент Японии № 2000-270484
Генератор для формирования пилот-сигнала, имеющего длительность импульса, основанную на величине номинального тока и тому подобном, который может подаваться из источника питания в транспортное средство, в некоторых случаях предусмотрен в кабеле для зарядки. Пилот-сигнал используется для определения, возможна или нет зарядка на стороне транспортного средства, и желательно использовать этот пилот-сигнал не только для определения в отношении того, возможна или нет зарядка, но также для активизации системы зарядки на стороне транспортного средства, детектирования обрыва в пределах системы зарядки и тому подобного. Хотя выложенный патент Японии № 2000-270484 раскрывает технологию детектирования аномалии в устройстве управления зарядкой на основании значения команды и результата детектирования переменного тока от промышленной сети, он не раскрывает технологию для детектирования аномалии и управления зарядкой посредством использования пилот-сигнала, сформированного в генераторе в кабеле для зарядки.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Настоящее изобретение было сделано для решения описанных выше проблем. Задача настоящего изобретения состоит в создании устройства управления зарядкой, которое может использовать пилот-сигнал из генератора в кабеле для зарядки для системы зарядки транспортного средства.
Устройство управления зарядкой согласно настоящему изобретению управляет транспортным средством, включающим в себя систему зарядки для зарядки устройства накопления энергии электроэнергией, подаваемой из источника питания, внешнего по отношению к транспортному средству, через кабель для зарядки. Транспортное средство принимает пилот-сигнал из генератора, предусмотренного в кабеле для зарядки, когда кабель для зарядки соединяет источник питания и транспортное средство. Генератор вызывает колебание пилот-сигнала по длительности импульса на основании величины номинального тока, который может подаваться в транспортное средство, в ответ на изменение потенциала пилот-сигнала с начального потенциала в потенциал колебаний. Устройство управления зарядкой включает в себя линию управления пилот-сигнала, в которую вводится пилот-сигнал; резистивный элемент, подключенный между линией управления пилот-сигнала и заземлением транспортного средства, для изменения потенциала пилот-сигнала с начального потенциала в потенциал колебаний; блок переключения, подключенный между линией управления пилот-сигнала и резистивным элементом либо между резистивным элементом и заземлением транспортного средства и переключаемый в любое одно из разъединенного состояния, где резистивный элемент отсоединен от любого одного из линии управления пилот-сигнала и заземления транспортного средства, и соединенного состояния, где резистивный элемент присоединен к линии управления пилот-сигнала и заземлению транспортного средства; и блок управления для запуска активизации системы зарядки на основании потенциала линии управления пилот-сигнала. Блок управления переключает блок переключения в разъединенное состояние, по меньшей мере, при соединении кабеля для зарядки и транспортного средства.
Согласно настоящему изобретению резистивный элемент для изменения потенциала пилот-сигнала с начального потенциала в потенциал колебания подключен между заземлением транспортного средства и линией управления пилот-сигнала, в которую вводится пилот-сигнал (пилот-сигнал CPLT) из генератора, предусмотренного в кабеле для зарядки. Блок переключения управляется блоком управления и в силу этого этот резистивный элемент отсоединяется от любого одного из линии управления пилот-сигнала и заземления транспортного средства, по меньшей мере, при соединении кабеля для зарядки и транспортного средства. Как результат, поскольку потенциал пилот-сигнала не изменяется на потенциал колебаний, по меньшей мере, при соединении кабеля для зарядки аккумулятора и транспортного средства, пилот-сигнал не колеблется и его потенциал удерживается на начальном потенциале. Поэтому может без труда определяться, что потенциал линии управления пилот-сигнала изменился в начальный потенциал, без использования сложного преобразователя F/V (частоты в напряжение), и активизация системы зарядки может запускаться на основании результата определения. Другими словами, пилот-сигнал из генератора может использоваться в качестве сигнала активизации для системы зарядки транспортного средства. Следовательно, может быть предложено устройство управления зарядкой, которое может использовать пилот-сигнал из генератора в кабеле для зарядки в качестве сигнала активизации для системы зарядки транспортного средства.
Предпочтительно, блок управления переключает блок переключения в разъединенное состояние при соединении кабеля для зарядки и транспортного средства и переключает блок переключения в соединенное состояние по завершении активизации системы зарядки.
Согласно настоящему изобретению, резистивный элемент отсоединяется от любого одного из линии управления пилот-сигнала и заземления транспортного средства при соединении кабеля для зарядки и транспортного средства. Поэтому пилот-сигнал из генератора может использоваться в качестве сигнала активизации для системы зарядки. Более того, резистивный элемент подключается к линии управления пилот-сигнала и заземлению транспортного средства по завершении активизации системы зарядки. Как результат потенциал пилот-сигнала изменяется на потенциал колебаний, а потому пилот-сигнал колеблется по длительности импульса, на основании величины номинального тока, который может подаваться в транспортное средство. Поэтому номинальный ток, который может подаваться в транспортное средство, может детектироваться посредством детектирования длительности импульса контрольного сигнала.
Более предпочтительно, блок управления дополнительно определяет, подключен или нет кабель для зарядки к транспортному средству на основании наличия или отсутствия пилот-сигнала.
Согласно настоящему изобретению, подключен или нет кабель для зарядки к транспортному средству, определяется на основании наличия или отсутствия пилот-сигнала. Поэтому, например, даже когда нет сигнала соединения между кабелем для зарядки и транспортным средством или даже когда сигнал соединения между кабелем для зарядки и транспортным средством аномален, может надлежащим образом определяться, присоединен или нет кабель для зарядки к транспортному средству.
Более предпочтительно, транспортное средство принимает сигнал соединения, чьи выходные данные изменяются в соответствии с состоянием соединения между кабелем для зарядки и транспортным средством. Блок управления дополнительно детектирует аномалию в сигнале соединения на основании результата сравнения между сигналом соединения и пилот-сигналом.
Согласно настоящему изобретению, например, когда выходные данные сигнала соединения указывают, что кабель для зарядки не подключен к транспортному средству, хотя кабель для зарядки подключен к транспортному средству, и пилот-сигнал из генератора удерживается на начальном потенциале, может быть детектирована аномалия в сигнале соединения. Поэтому пилот-сигнал из генератора может без труда использоваться для детектирования аномалии в сигнале соединения.
Более предпочтительно, транспортное средство принимает сигнал соединения, чьи выходные данные изменяются в соответствии с состоянием соединения между кабелем для зарядки и транспортным средством. Блок управления дополнительно детектирует, по меньшей мере, одно из прекращения подачи электроэнергии на источник питания и перезапуска подачи электроэнергии на источник питания на основании потенциала линии управления пилот-сигнала, когда определено, что кабель для зарядки присоединен к транспортному средству на основании сигнала соединения.
Согласно настоящему изобретению, например, когда выходные данные сигнала соединения указывают, что кабель для зарядки подключен к транспортному средству, и когда потенциал линии управления пилот-сигнала является потенциалом, когда пилот-сигнал не вводится из генератора, определяется, что подача электроэнергии на источник питания прекращается. Более того, когда потенциал линии управления пилот-сигнала изменился с потенциала, когда пилот-сигнал не вводится с генератора, в начальный потенциал, может определяться, что восстановление нарушенного питания было достигнуто.
Более предпочтительно, пилот-сигнал вводится в линию управления пилот-сигнала, когда наступает зарезервированное время зарядки, установленное в таймере для резервирования зарядки транспортного средства, наряду с тем, что кабель для зарядки аккумулятора подключен к транспортному средству и подключен к источнику питания с включенным в разрыв таймером.
Согласно настоящему изобретению пилот-сигнал вводится в линию управления пилот-сигнала, когда наступает зарезервированное время зарядки, установленное в таймере. Поэтому когда наступает зарезервированное время зарядки, потенциал линии управления пилот-сигнала изменяется с потенциала, когда пилот-сигнал не вводится в начальный потенциал и удерживается на начальном потенциале. Поэтому может без труда определяться, что потенциал линии управления пилот-сигнала изменился в начальный потенциал, и активизация системы зарядки может запускаться на основании результата определения. Согласно такой конфигурации простое подключение доступного для коммерческого приобретения и недорогого таймера зарядки между кабелем для зарядки и источником питания, без обеспечения функции таймера на стороне транспортного средства, предоставляет возможность зарядки во время начала зарядки (например, ночное время, когда плата за электроэнергию является недорогой), предварительно выбранное пользователем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
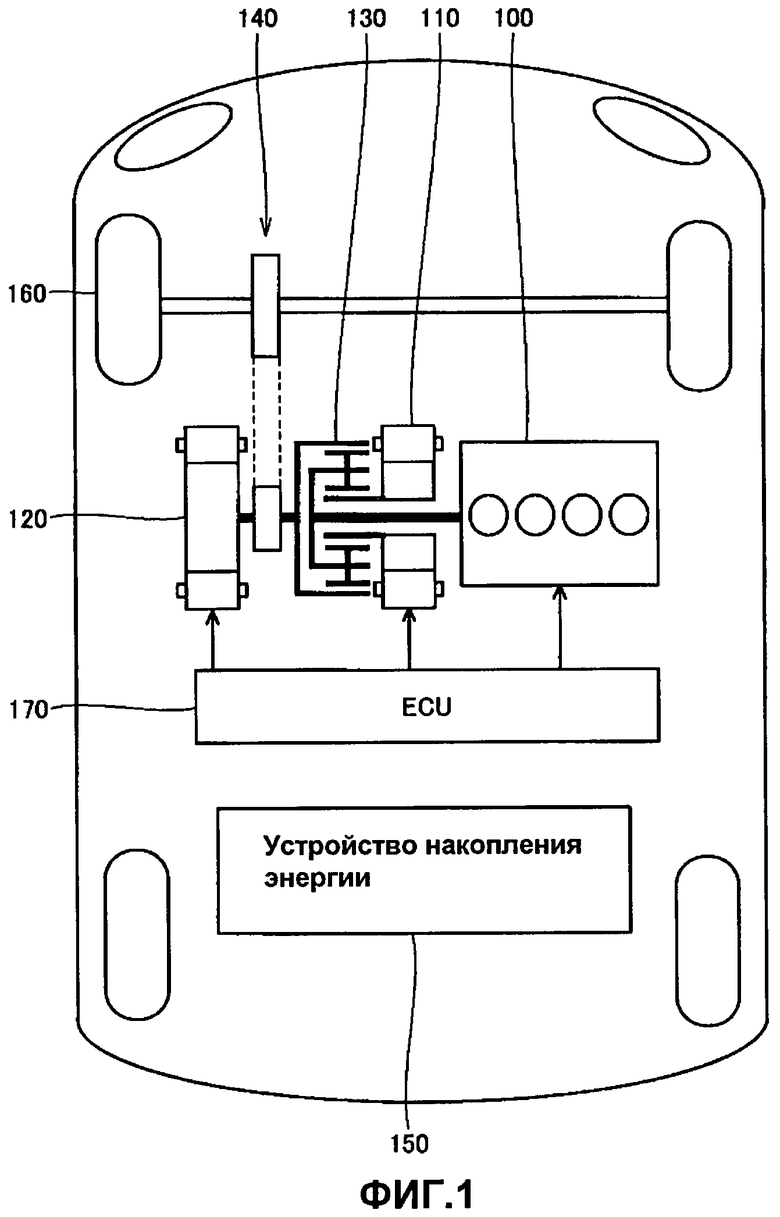
фиг.1 изображает общую схему подключаемого транспортного средства с гибридным приводом, показанного в качестве примера транспортного средства, на котором установлены устройства управления зарядкой, согласно первому варианту осуществления настоящего изобретения;
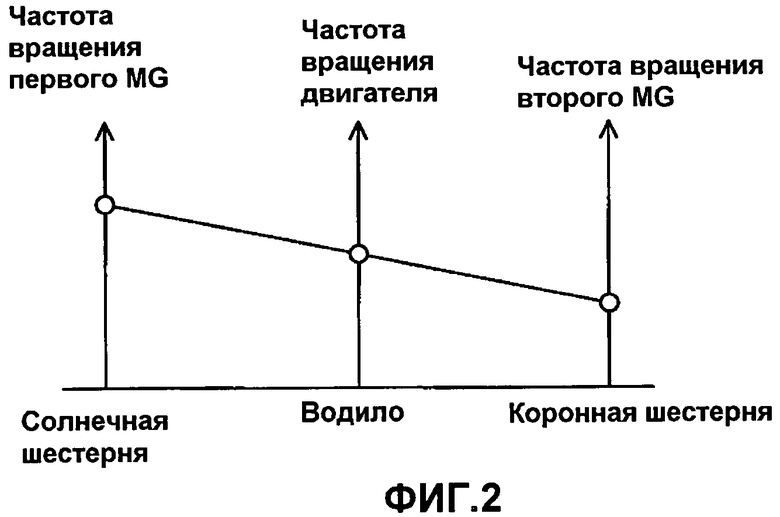
фиг.2 изображает коллинеарную диаграмму устройства деления мощности согласно первому варианту осуществления настоящего изобретения;
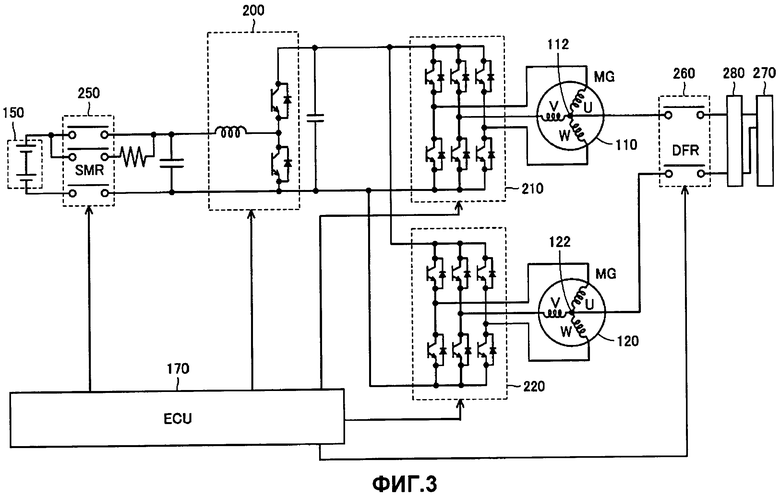
фиг.3 изображает общую схему электрической системы подключаемого транспортного средства с гибридным приводом согласно первому варианту осуществления настоящего изобретения;
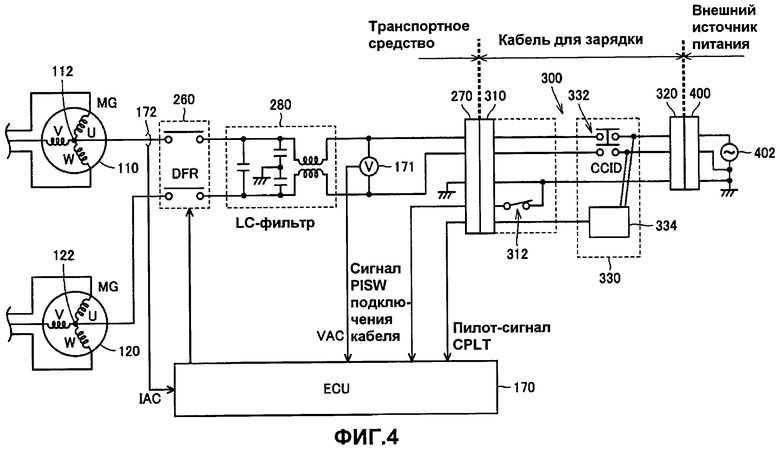
фиг.4 изображает схему конфигурации части, имеющей отношение к системе зарядки электрической системы, согласно первому варианту осуществления настоящего изобретения;
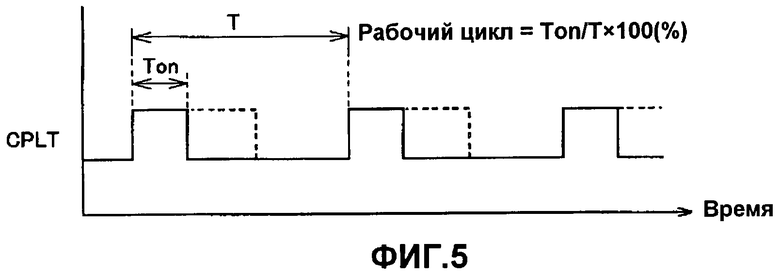
фиг.5 иллюстрирует форму пилот-сигнала, сформированного контроллером EVSE, согласно первому варианту осуществления настоящего изобретения;
фиг.6 изображает электрическую схему системы зарядки согласно первому варианту осуществления настоящего изобретения;
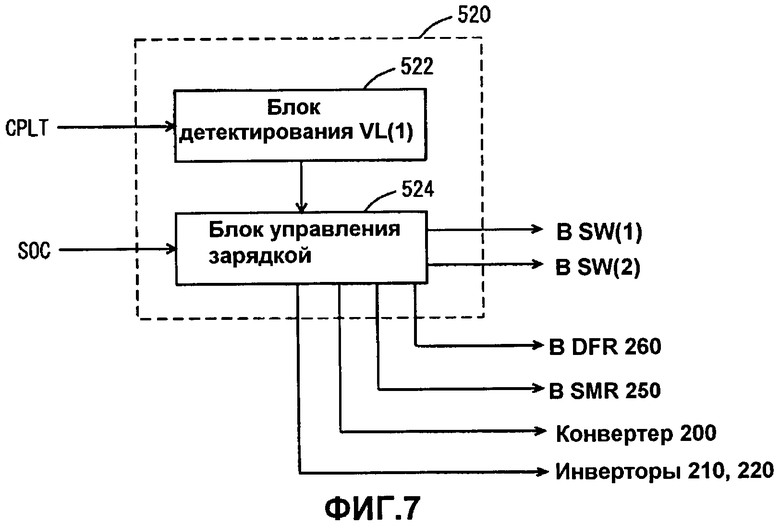
фиг.7 изображает функциональную структурную схему устройства управления зарядкой согласно первому варианту осуществления настоящего изобретения;
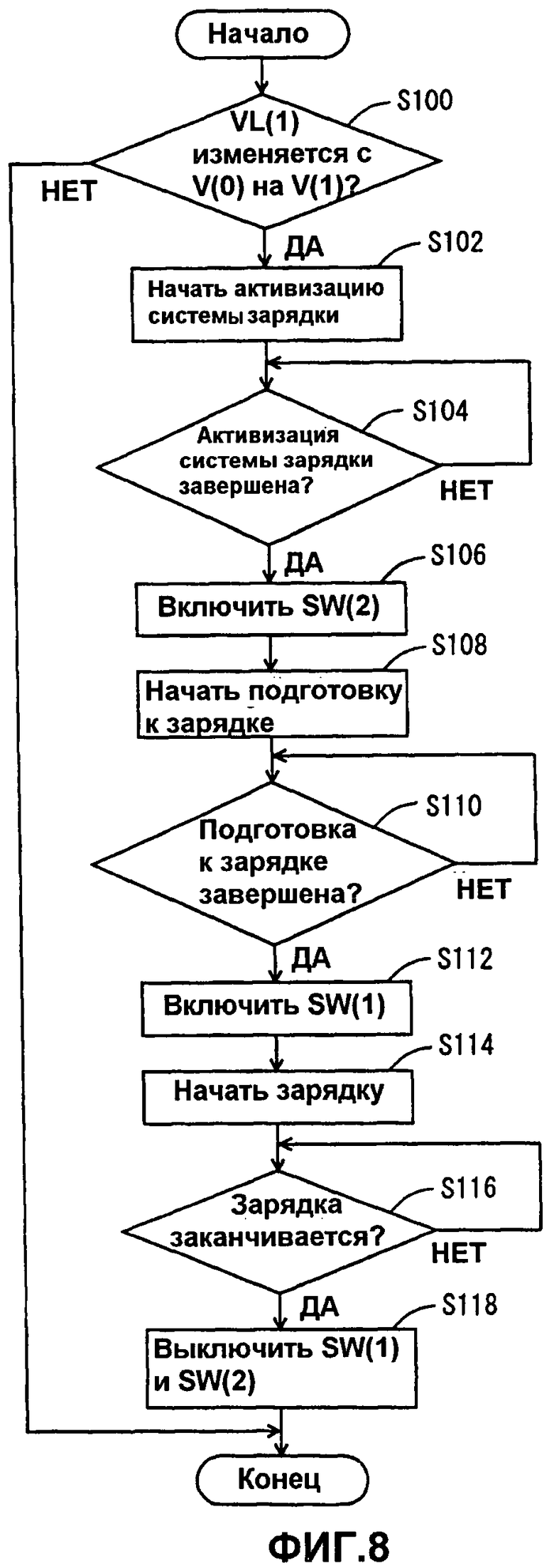
фиг.8 изображает блок-схему последовательности операций способа, иллюстрирующую структуру управления CPU, который конфигурирует устройство управления зарядкой, согласно первому варианту осуществления настоящего изобретения;
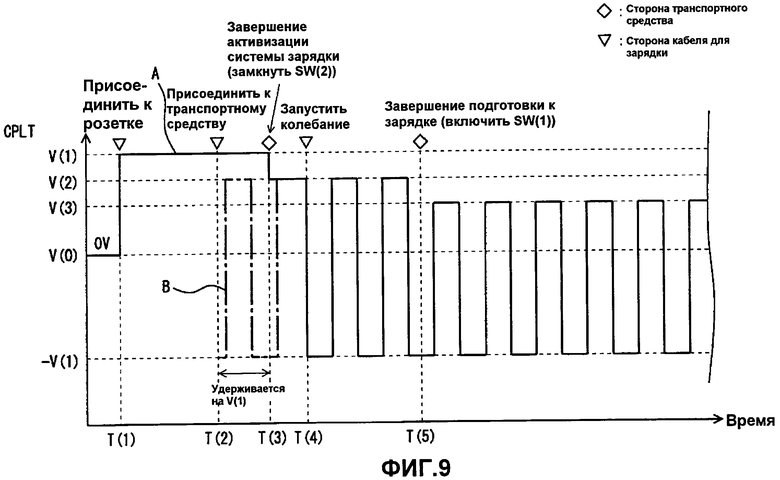
фиг.9 изображает временную диаграмму (№ 1) пилот-сигнала CPLT;
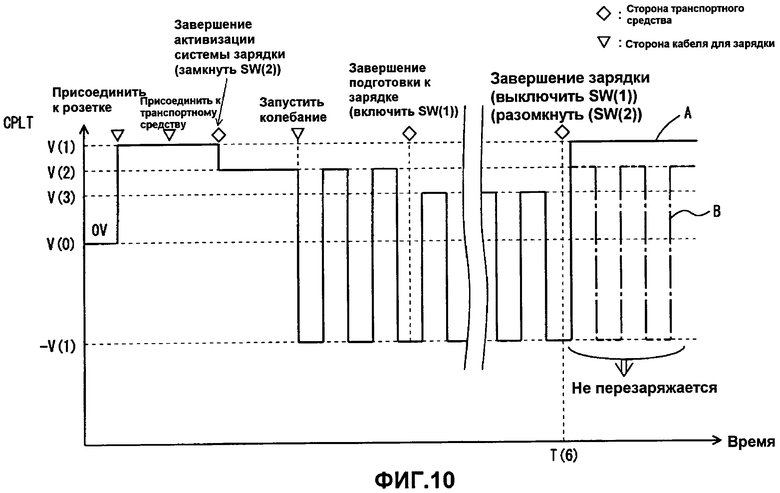
фиг.10 - изображает временную диаграмму (№ 2) пилот-сигнала CPLT;
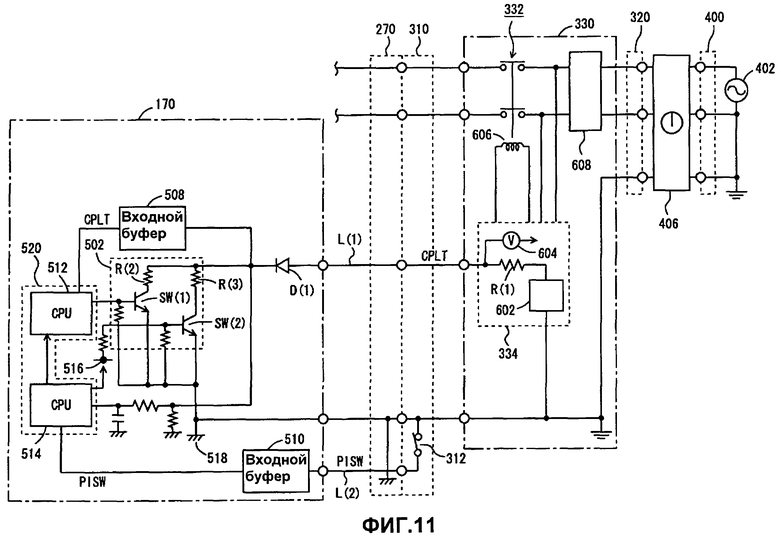
фиг.11 изображает электрическую схему системы зарядки согласно модификации первого варианта осуществления настоящего изобретения;
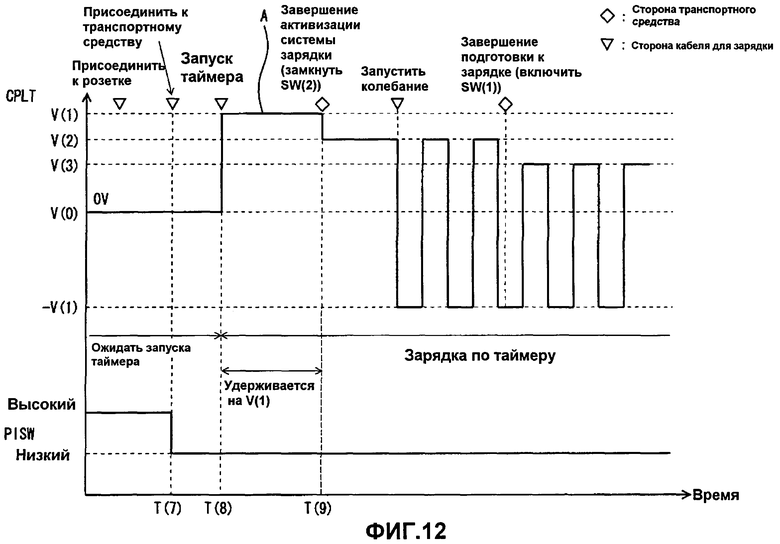
фиг.12 изображает временную диаграмму (№ 1) пилот-сигнала CPLT и сигнала PISW подключения кабеля;
фиг.13 изображает сравнительную таблицу пилот-сигнала CPLT и сигнала PISW подключения кабеля;
фиг.14 изображает блок-схему последовательности операций способа, иллюстрирующую структуру управления CPU, который конфигурирует устройство управления зарядкой, согласно второму варианту осуществления настоящего изобретения;
фиг.15 изображает временную диаграмму (№ 2) пилот-сигнала CPLT и сигнала PISW подключения кабеля;
фиг.16 изображает блок-схему последовательности операций способа, иллюстрирующую структуру управления CPU, который конфигурирует устройство управления зарядкой, согласно третьему варианту осуществления настоящего изобретения;
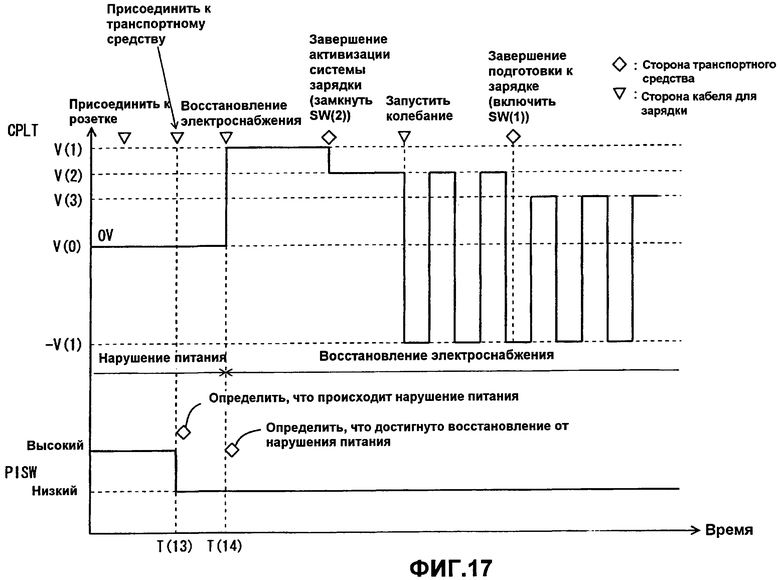
фиг.17 изображает временную диаграмму (№ 3) пилот-сигнала CPLT и сигнала PISW подключения кабеля.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут описаны в дальнейшем со ссылками на чертежи. В последующем описании одинаковые компоненты обозначены идентичными условными обозначениями.
Первый вариант осуществления
Подключаемое транспортное средство с гибридным приводом, включающее в себя устройство управления зарядкой согласно настоящему варианту осуществления, будет описано со ссылкой на фиг.1 и 2. Отмечено, что транспортное средство, к которому применено устройство управления зарядкой согласно настоящему варианту осуществления, не ограничено транспортным средством с гибридным приводом, но может быть электромобилем.
Это подключаемое транспортное средство с гибридным приводом включает в себя двигатель 100, первый MG (двигатель-генератор) 110, второй MG 120, устройство 130 деления мощности, редуктор 140, устройство 150 накопления энергии, ведущее колесо 160 и ECU 170.
Двигатель 100, первый MG 110 и второй MG 120 присоединены к устройству 130 деления мощности. Подключаемое транспортное средство с гибридным приводом движется, используя движущую силу от, по меньшей мере, одного двигателя 100 и второго MG 120. Движущая сила, вырабатываемая двигателем 100, делится устройством 130 деления мощности на два тракта, то есть один тракт, через который движущая сила передается на ведущее колесо 160 через редуктор 140, и другой, через который движущая сила передается на первый MG 110.
Первый MG 110 является вращающейся электрической машиной переменного тока (AC) и, например, является трехфазным синхронным электродвигателем переменного тока, включающим в себя обмотку фазы U, обмотку фазы V и обмотку фазы W. Первый MG 110 вырабатывает электроэнергию, используя движущую силу двигателя 100, разделенную устройством 130 деления мощности. Например, когда состояние заряда (которое также будет указываться ссылкой как «SOC (состояние заряда)» в дальнейшем) устройства 150 накопления энергии падает ниже предопределенного значения, двигатель 100 запускается, и электроэнергия вырабатывается первым MG 110. Электроэнергия, вырабатываемая первым MG 110, преобразуется из переменного тока в постоянный ток инвертором (который будет описан в дальнейшем), ее напряжение регулируется конвертером (который будет описан в дальнейшем), а затем электроэнергия накапливается в устройстве 150 накопления энергии.
Второй MG 120 является вращающейся электрической машиной переменного тока и, например, является трехфазным синхронным электродвигателем переменного тока, включающим в себя обмотку фазы U, обмотку фазы V и обмотку фазы W. Второй MG 120 вырабатывает движущую силу, используя, по меньшей мере, одну из электроэнергии, накопленной в устройстве 150 накопления энергии, и электроэнергии, вырабатываемой первым MG 110. Движущая сила второго MG 120 передается на ведущее колесо 160 через редуктор 140. Как результат второй MG 120 помогает двигателю 100 или заставляет транспортное средство двигаться, используя движущую силу из второго MG 120. Хотя ведущее колесо 160 показано в качестве переднего колеса на фиг.1, заднее колесо может приводиться в движение вторым MG 120 вместо переднего колеса или вместе с передним колесом.
Отмечено, что во время торможения и тому подобного транспортного средства второй MG 120 приводится в движение ведущим колесом 160 через редуктор 140, и второй MG 120 работает в качестве генератора. Как результат второй MG 120 работает в качестве рекуперативного тормоза для преобразования энергии торможения в электроэнергию. Электроэнергия, выработанная вторым MG 120, накапливается в устройстве 150 накопления энергии.
Устройство 130 деления мощности сформировано из планетарной передачи, включающей в себя солнечную шестерню, ведущую шестерню, водило и коронную шестерню. Ведущая шестерня зацепляется с солнечной шестерней и коронной шестерней. Водило с возможностью вращения поддерживает ведущую шестерню и в дополнение присоединено к коленчатому валу двигателя 100. Солнечная шестерня присоединена к валу вращения первого MG 110. Коронная шестерня присоединена к валу вращения второго MG 120 и редуктора 140.
Двигатель 100, первый MG 110 и второй MG 120 соединены с устройством 130 деления мощности, сформированным из планетарной передачи, включенным в разрыв между ними, так что соотношение между частотами вращения двигателя 100, первого MG 110 и второго MG 120 является таким, что они соединяются прямой линией на коллинеарной диаграмме, как показано на фиг.2.
Устройство 150 накопления энергии является перезаряжаемым источником питания постоянного тока и образовано из вторичной аккумуляторной батареи, например, такой как никель-металлогидридная или литий-ионная батарея. Напряжение устройства 150 накопления энергии, например, имеет значение около 200 В. В дополнение к электроэнергии, вырабатываемой первым MG 110 и вторым MG 120, электроэнергия, подаваемая из источника питания, внешнего по отношению к транспортному средству, накапливается в устройстве 150 накопления энергии, как будет описано в дальнейшем. Отмечено, что конденсатор большой емкости также может применяться в качестве устройства 150 накопления энергии, и любой буферный накопитель электроэнергии может применяться, если он может временно хранить электроэнергию, вырабатываемую первым MG 110 и вторым MG 120, а также электроэнергию из источника питания, внешнего по отношению к транспортному средству, и выдавать накопленную электроэнергию во второй MG 120.
Двигатель 100, первый MG 110 и второй MG 120 управляются посредством ECU 170. Отмечено, что ECU 170 может быть поделен на множество ECU для каждой функции. Отмечено, что конфигурация ECU 170 будет описана в дальнейшем.
Электрическая система подключаемого транспортного средства с гибридным приводом согласно настоящему варианту осуществления будет описана со ссылкой на фиг.3. Эта электрическая система включает в себя устройство 150 накопления энергии, SMR (главное реле системы) 250, конвертер 200, первый инвертор 210, второй инвертор 220, первый MG 110, второй MG 120, DFR (реле мертвого фронта) 260, LC-фильтр 280, зарядный ввод 270 и ECU 170.
SMR 250 предусмотрено между устройством 150 накопления энергии и конвертером 200. SMR 250 является реле для электрического соединения/разъединения устройства 150 накопления энергии и электрической системы, а включение/выключение SMR 250 управляется посредством ECU 170. Другими словами, когда транспортное средство движется и когда устройство 150 накопления энергии заряжается от источника питания, внешнего по отношению к транспортному средству, SMR 250 включено, а устройство 150 накопления энергии электрически подключено к электрической системе. С другой стороны, когда система транспортного средства останавливается, SMR 250 выключается, а устройство 150 накопления энергии электрически отсоединяется от электрической системы.
Конвертер 200 включает в себя дроссель, два транзистора npn-типа и два диода. Дроссель имеет один конец, присоединенный к стороне положительного электрода устройства 150 накопления энергии, а другой конец присоединен к точке соединения двух транзисторов npn-типа. Два транзистора npn-типа соединены последовательно, и каждый транзистор npn-типа имеет диод, присоединенный параллельно.
Отмечено, что, например, IGBT (биполярный транзистор с изолированным затвором) может использоваться в качестве транзистора npn-типа. Более того, мощный переключающий элемент, такой как мощный MOSFET (полевой транзистор на основе перехода металл-оксид-полупроводник), может использоваться вместо транзистора npn-типа.
Когда электроэнергия подается из устройства 150 накопления энергии на первый MG 110 или второй MG 120, конвертер 200 поднимает напряжение электроэнергии, разряжаемой из устройства 150 накопления энергии, и подает электроэнергию на первый MG 110 или второй MG 120 на основании сигнала управления из ECU 170. Более того, когда устройство 150 накопления энергии заряжается, конвертер 200 понижает напряжение электроэнергии, подаваемой из первого MG 110 или второго MG 120, и выдает электроэнергию в устройство 150 накопления энергии.
Первый инвертор 210 включает в себя плечо фазы U, плечо фазы V и плечо фазы W. Плечо фазы U, плечо фазы V и плечо фазы W соединены параллельно. Плечо каждой фазы включает в себя два транзистора npn-типа, соединенные последовательно, и каждый транзистор npn-типа имеет диод, присоединенный встречно-параллельно. Точка соединения между двумя транзисторами npn-типа в плече каждой фазы присоединена к концу соответствующей обмотки в первом MG 110, который отличен от нейтральной точки 112.
Первый инвертор 210 преобразует электроэнергию постоянного тока, подаваемую из конвертера 200, в электроэнергию переменного тока и подает преобразованную электроэнергию переменного тока на первый MG 110. Более того, первый инвертор 210 преобразует электроэнергию переменного тока, вырабатываемую первым MG 110, в электроэнергию постоянного тока и подает преобразованную электроэнергию постоянного тока в конвертер 200.
Второй инвертор 220 также имеет конфигурацию, подобную таковой у первого инвертора 210. Точка соединения между двумя транзисторами npn-типа в плече каждой фазы присоединена к концу соответствующей обмотки во втором MG 120, который отличен от нейтральной точки 122.
Второй инвертор 220 преобразует электроэнергию постоянного тока, подаваемую из конвертера 200, в электроэнергию переменного тока и подает преобразованную электроэнергию переменного тока на второй MG 120. Более того, второй инвертор 220 преобразует электроэнергию переменного тока, вырабатываемую вторым MG 120, в электроэнергию постоянного тока и подает преобразованную электроэнергию постоянного тока в конвертер 200.
В дополнение, когда устройство 150 накопления энергии заряжается от источника питания, внешнего по отношению к транспортному средству, первый инвертор 210 и второй инвертор 220 преобразуют электроэнергию переменного тока, выдаваемую из источника питания, внешнего по отношению к транспортному средству, в нейтральную точку 112 первого MG 110 и нейтральную точку 122 второго MG 120, в электроэнергию постоянного тока на основании сигнала управления из ECU 170 и подают преобразованную электроэнергию постоянного тока на конвертер 200, используя способ, который будет описан в дальнейшем.
DFR 260 предусмотрено между парой линий питания, присоединенных к нейтральным точкам 112, 122, и парой линий питания, присоединенных к LC-фильтру 280. DFR 260 является реле для электрического подключения/отключения зарядного ввода 270 и электрической системы, а включение/выключение DFR 260 управляется посредством ECU 170. Другими словами, когда транспортное средство движется, DFR 260 выключено, а зарядный ввод 270 электрически отсоединен от электрической системы. С другой стороны, когда устройство 150 накопления энергии заряжается от источника питания, внешнего по отношению к транспортному средству, DFR 260 включено, а зарядный ввод 270 электрически подключен к электрической системе.
LC-фильтр 280 предусмотрен между DFR 260 и зарядным вводом 270 и предотвращает вывод высокочастотных шумов из электрической системы подключаемого транспортного средства с гибридным приводом в источник питания, внешний по отношению к транспортному средству, когда устройство 150 накопления энергии заряжается от источника питания, внешнего по отношению к транспортному средству.
Зарядный ввод 270 служит в качестве средства сопряжения электроэнергии для приема электроэнергии зарядки из источника питания, внешнего по отношению к транспортному средству. Когда устройство 150 накопления энергии заряжается от источника питания, внешнего по отношению к транспортному средству, разъем кабеля для зарядки аккумулятора, через который электроэнергия подается в транспортное средство из источника питания, внешнего по отношению к транспортному средству, подключен к зарядному вводу 270.
ECU 170 вырабатывает сигналы управления для приведения в действие SMR 250, DFR 260, конвертера 200, первого инвертора 210 и второго инвертора 220 и управляет работой каждого из этих устройств.
Часть, имеющая отношение к системе зарядки в электрической системе согласно настоящему варианту осуществления, будет описана со ссылкой на фиг.4. Кабель 300 для зарядки аккумулятора для соединения подключаемого транспортного средства с гибридным приводом и источника питания, внешнего по отношению к транспортному средству, включает в себя разъем 310, штепсель 320 и CCID 330 (устройство прерывания зарядной цепи).
Разъем 310 сконфигурирован с возможностью присоединения к зарядному вводу 270, предусмотренному на транспортном средстве. Концевой выключатель 312 предусмотрен в разъеме 310. Когда разъем 310 подключается к зарядному вводу 270, концевой выключатель 312 приводится в действие, и сигнал PISW подключения кабеля, указывающий, что разъем 310 подключен к зарядному вводу 270, вводится в ECU 170.
Штепсель 320, например, подключается к розетке 400 электроснабжения, предусмотренной в доме. Электроэнергия переменного тока подается из источника 402 питания (например, сети электроснабжения) в розетку 400 электроснабжения.
CCID 330 включает в себя реле 332 и контроллер 334 EVSE (электрооборудования питания транспортного средства). Реле 332 установлено на паре линий питания, через которые электроэнергия зарядки подается из источника 402 питания в подключаемое транспортное средство с гибридным приводом. Включение/выключение реле 332 управляется контроллером 334 EVSE. Когда реле 332 выключено, проводящий тракт, через который электроэнергия подается из источника 402 питания в подключаемое транспортное средство с гибридным приводом, размыкается. С другой стороны, когда реле 332 включено, электроэнергия может подаваться из источника 402 питания в подключаемое транспортное средство с гибридным приводом.
Когда штепсель 320 присоединен к розетке 400 электроснабжения, контроллер 334 EVSE приводится в действие электроэнергией, подаваемой из источника 402 питания. Контроллер 334 EVSE вырабатывает пилот-сигнал CPLT, который должен отправляться в ECU 170 транспортного средства через линию управления пилот-сигнала. Когда разъем 310 подключен к зарядному вводу 270 и потенциал пилот-сигнала CPLT понижается до предписанного значения, контроллер 334 EVSE заставляет пилот-сигнал CPLT колебаться в предписанном рабочем цикле (отношении длительности импульса к циклу колебания).
Этот рабочий цикл устанавливается на основании номинального тока, который может подаваться из источника 402 питания через кабель 300 для зарядки в транспортное средство.
Датчик 171 напряжения и датчик 172 тока предусмотрены на стороне транспортного средства.
Датчик 171 напряжения детектирует напряжение VAC между парой линий питания, предусмотренных между зарядным вводом 270 и LC-фильтром 280, и выводит детектированное значение в ECU 170. Датчик 172 тока детектирует ток IAC, протекающий через линию питания между DFR 260 и нейтральной точкой 112 первого MG 110, и выводит детектированное значение в ECU 170. Отмечено, что датчик 172 тока может быть предусмотрен в линии питания между DFR 260 и нейтральной точкой 122 второго MG 120.
Пилот-сигнал CPLT, сформированный контроллером 334 EVSE, будет описан со ссылкой на фиг.5. Пилот-сигнал CPLT колеблется в пределах предписанного цикла T. Здесь длительность Ton импульса пилот-сигнала устанавливается на основании номинального тока, который может подаваться из источника 402 питания через кабель 300 для зарядки в транспортное средство. Сообщение номинального тока предусмотрено из контроллера 334 EVSE в ECU 170 транспортного средства посредством использования пилот-сигнала CPLT, в соответствии с рабочим циклом, указываемым отношением длительности Ton импульса к циклу T.
Отмечено, что номинальный ток определен для каждого кабеля для зарядки. В зависимости от типа кабеля для зарядки номинальный ток меняется, а потому рабочий цикл пилот-сигнала CPLT также меняется. ECU 170 транспортного средства принимает через линию управления пилот-сигнала пилот-сигнал CPLT, отправленный из контроллера 334 EVSE, предусмотренного в кабеле 300 для зарядки, и детектирует рабочий цикл принятого пилот-сигнала CPLT, так что ECU 170 транспортного средства может детектировать номинальный ток, который может подаваться из источника 402 питания через кабель 300 для зарядки транспортного средства.
Контроллер 334 EVSE вызывает включение реле 332, когда подготовка к зарядке завершена на стороне транспортного средства.
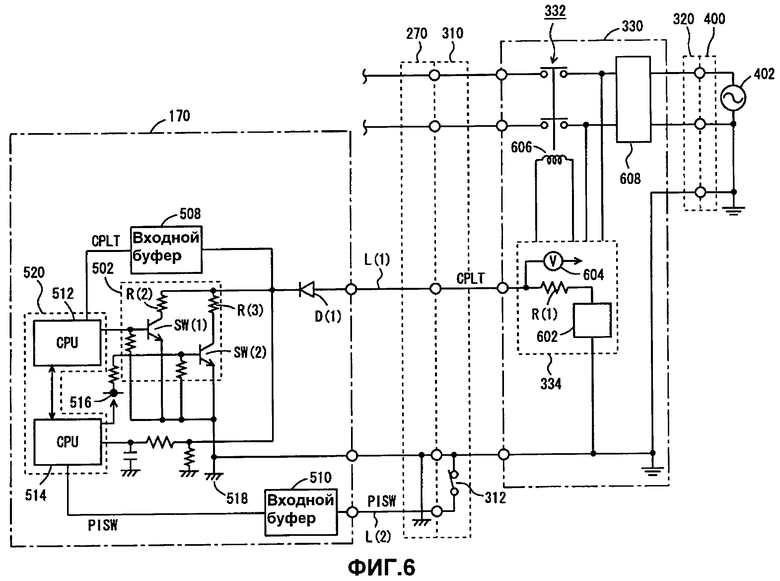
Часть, имеющая отношение к системе зарядки в электрической системе согласно настоящему варианту осуществления, будет дополнительно описана со ссылкой на фиг.6.
CCID 330, предусмотренный в кабеле 300 для зарядки, включает в себя электромагнитную катушку 606 и детектор 608 утечки в дополнение к реле 332 и контроллеру 334 EVSE. Контроллер 334 EVSE включает в себя генератор 602, резистивный элемент R(1) и датчик 604 напряжения.
Генератор 602 приводится в действие электроэнергией, подаваемой из источника 402 питания. Генератор 602 выводит неколебательный сигнал, когда потенциал пилот-сигнала CPLT, детектированный датчиком 604 напряжения, находится около предписанного начального потенциала V(1) (например, 12 В), и выводит сигнал, который колеблется с предписанной частотой (например, 1 кГц) и рабочим циклом, когда потенциал пилот-сигнала CPLT понижается до предписанного потенциала V(2) колебания (например, 9 В), который ниже, чем V(1).
В дополнение контроллер 334 EVSE подает ток в электромагнитную катушку 606, когда потенциал пилот-сигнала CPLT находится около предписанного потенциала V(3) (например, 6 В). Когда ток подается из контроллера 334 EVSE, электромагнитная катушка 606 вырабатывает электромагнитную силу и реле 332 замыкается. Отмечено, что потенциал пилот-сигнала CPLT регулируется переключением значения сопротивления резистивной цепи 502 ECU 170, как будет описано в дальнейшем.
Детектор 608 утечки предусмотрен на паре линий питания, через которые электроэнергия зарядки подается из источника 402 питания в подключаемое транспортное средство с гибридным приводом, и детектирует наличие или отсутствие утечки. Более точно детектор 608 утечки детектирует баланс тока, протекающего через пару линий питания в противоположных направлениях, и детектирует появление утечки, когда нарушается баланс. Отмечено, что хотя не показано особо когда утечка детектирована детектором 608 утечки, подача электроэнергии к электромагнитной катушке 606 прерывается и реле 332 размыкается.
С другой стороны, ECU 170, предусмотренный на подключаемом транспортном средстве с гибридным приводом, включает в себя резистивную цепь 502, входные буферы 508, 510 и CPU (блок обработки и управления) 520. Резистивная цепь 502 включает в себя согласующие резистивные элементы R(2), R(3) и переключатели SW(1), SW(2). CPU 520 включает в себя CPU 512 и CPU 514.
Согласующий резистивный элемент R(2) и переключатель SW(1) подключены последовательно между заземлением 518 транспортного средства и линией L(1) управления пилот-сигнала, через которую передается пилот-сигнал CPLT.
Согласующий резистивный элемент R(3) и переключатель SW(2) подключены последовательно между заземлением 518 транспортного средства и линией L(1) управления пилот-сигнала и подключены параллельно последовательно соединенным согласующему резистивному элементу R(2) и переключателю SW(1). Отмечено, что хотя на фиг.6 показан пример, в котором переключатель SW(2) подключен между согласующим резистивным элементом R(3) и заземлением 518 транспортного средства, переключатель SW(2) может быть присоединен между линией L(1) управления пилот-сигнала и согласующим резистивным элементом R(3).
Переключатель SW(1) замыкается/размыкается в ответ на сигнал управления из CPU 512. Когда переключатель SW(1) замкнут, согласующий резистивный элемент R(2) подключен к заземлению 518 транспортного средства. Когда переключатель SW(1) разомкнут, согласующий резистивный элемент R(2) отключен от заземления 518 транспортного средства. Отмечено, что в состоянии без зарядки переключатель SW(1) разомкнут, а согласующий резистивный элемент R(2) и заземление 518 транспортного средства установлены в разомкнутое состояние. Другими словами, когда кабель 300 для зарядки подключен к транспортному средству, переключатель SW(2) размыкается, и согласующий резистивный элемент R(3) отсоединяется от заземления 518 транспортного средства.
Источник 516 питания, чья выходная мощность регулируется в ответ на сигнал управления из CPU 514, подключен к переключателю SW(2). Когда электроэнергия подается из источника 516 питания на переключатель SW(2) в ответ на сигнал управления из CPU 514, переключатель SW(2) замыкается, и согласующий резистивный элемент R(3) подключается к заземлению 518 транспортного средства. Когда электроэнергия, подаваемая из источника 516 питания на переключатель SW(2), прерывается в ответ на сигнал управления из CPU 514, переключатель SW(2) размыкается, и согласующий резистивный элемент R(3) отключается от заземления 518 транспортного средства. В состоянии без зарядки переключатель SW(2) разомкнут, а согласующий резистивный элемент R(3) и заземление 518 транспортного средства установлены в разомкнутое состояние.
Отмечено, что переключатель SW(2) может быть сконфигурирован, чтобы замыкаться/размыкаться в ответ на сигнал управления из CPU 512 подобно переключателю SW(1). Если не обязательно проводить различие для описания между сигналом управления из CPU 512 и сигналом управления из CPU 514, в последующем описании будут предусмотрены переключатели SW(1) и SW(2), замыкаемые/размыкаемые в ответ на сигнал управления из CPU 520.
Резистивная цепь 502 переключает потенциал пилот-сигнала CPLT, замыкая/размыкая переключатели SW(1) и SW(2) в ответ на сигнал управления из CPU 520.
Другими словами, когда переключатель SW(1) разомкнут и переключатель SW(2) разомкнут в ответ на сигнал управления из CPU 520, каждый из согласующих резистивных элементов R(2) и R(3) отсоединен от заземления 518 транспортного средства, а потенциал пилот-сигнала CPLT поддерживается на начальном потенциале V(1). Как результат пилот-сигнал CPLT поддерживается в неколебательном состоянии.
Когда переключатель SW(1) разомкнут, а переключатель SW(2) замкнут в ответ на сигнал управления из CPU 520, согласующий резистивный элемент R(3) подключается к заземлению 518 транспортного средства. Поэтому потенциал пилот-сигнала CPLT понижается до потенциала V(2) колебаний. Более того, когда переключатель SW(1) разомкнут в ответ на сигнал управления из CPU 520, каждый из согласующих резистивных элементов R(2) и R(3) подключается к заземлению 518 транспортного средства. Поэтому потенциал пилот-сигнала CPLT дополнительно понижается до предписанного потенциала V(3).
Входной буфер 508 принимает пилот-сигнал CPLT линии L(1) управления пилот-сигнала и выводит принятый пилот-сигнал CPLT в CPU 512.
Входной буфер 510 принимает сигнал PISW подключения кабеля из сигнальной линии L(2), подключенной к концевому выключателю 312 разъема 310, и выводит принятый сигнал PISW подключения кабеля в CPU 514.
Отмечено, что предопределенное напряжение (например, напряжение на таком же уровне, как начальный потенциал V(1)), подается на сигнальную линию L(2) из ECU 170, и сигнал PISW подключения кабеля устанавливается в высокий уровень, когда разъем 310 не присоединен к зарядному вводу 270. Когда разъем 310 присоединен к зарядному вводу 270 и концевой выключатель включен, потенциал сигнальной линии L(2) установлен на уровень заземления, а сигнал PISW подключения кабеля установлен в низкий уровень. Другими словами, то обстоятельство, что сигнал PISW подключения кабеля находится на низком уровне, означает состояние, когда кабель 300 для зарядки присоединен к транспортному средству.
CPU 514 определяет, присоединен ли разъем 310 к зарядному вводу 270 на основании сигнала PISW подключения кабеля из входного буфера 510. Затем CPU 514 выводит результат определения в CPU 512.
Функциональная структурная схема устройства управления зарядкой согласно настоящему варианту осуществления будет описана со ссылкой на фиг.7. Как показано на фиг.7, это устройство управления зарядкой включает в себя блок 522 детектирования VL(1) и блок 524 управления зарядкой.
Блок 522 детектирования VL(1) детектирует потенциал VL(1) линии L(1) управления пилот-сигнала по отношению к заземлению 518 транспортного средства (напряжение между линией L(1) управления пилот-сигнала и заземлением 518 транспортного средства) и выводит сигнал, указывающий результат детектирования, в блок 524 управления зарядкой. Потенциал линии L(1) управления пилот-сигнала устанавливается в потенциал V(0) (например, 0 вольт), когда пилот-сигнал CPLT не вводится из кабеля 300 для зарядки аккумулятора, и устанавливается в потенциал пилот-сигнала CPLT, когда пилот-сигнал CPLT вводится. Отмечено, что пилот-сигнал CPLT не вводится в линию L(1) управления пилот-сигнала в любом из следующих случаев: случае, когда кабель 300 для зарядки не подключен к зарядному вводу 270; случае, когда кабель 300 для зарядки не подключен к розетке 400 электроснабжения, хотя кабель 300 для зарядки подключен к зарядному вводу 270; и в случае состояния нарушения питания, когда электроэнергия не подается в источник 402 питания, хотя кабель 300 для зарядки подключен к зарядному вводу 270 и к розетке 400 электроснабжения.
Блок 524 управления зарядкой управляет переключателями SW(1) и SW(2), DFR 260, SMR 250, конвертером 200, а также инверторами 210 и 220 на основании SOC устройства 150 накопления энергии и сигнала из блока 522 детектирования VL(1), и активизирует систему зарядки и готовится к зарядке. В дополнение блок 524 управления зарядкой управляет электроэнергией зарядки из кабеля 300 для зарядки.
Устройство управления согласно настоящему изобретению, имеющее такие функциональные блоки, может быть реализовано в формах как аппаратных средств, так и программного обеспечения, аппаратных средств, образованных, главным образом, из цифровой схемы или аналоговой схемы, и программного обеспечения, образованного, главным образом, из CPU 520 и памяти, включенной в ECU 170, а также программы, считываемой из памяти и выполняемой CPU 520. Вообще, реализация в форме аппаратных средств упоминается преимущественной по быстродействию, а реализация в форме программного обеспечения упоминается преимущественной по изменению конструкции. В последующем будет описана реализация устройства управления в форме программного обеспечения. Отмечено, что носитель записи, имеющий такую программу, записанную на нем, также является аспектом настоящего изобретения.
Структура управления программы, выполняемой CPU 520, служащего в качестве устройства управления зарядкой согласно настоящему варианту осуществления, будет описана со ссылкой на фиг.8. Отмечено, что эта программа выполняется повторно в течение предопределенного времени цикла.
На этапе (который будет в дальнейшем кратко обозначаться как «S») 100 CPU 520 определяет, изменился или нет потенциал VL(1) линии L(1) управления пилот-сигнала относительно заземления 518 транспортного средства с потенциала V(0) на начальный потенциал V(1). Если потенциал VL(1) линии L(1) управления пилот-сигнала изменился на начальный потенциал V(1) (Да на S100), последовательность операций переходит на S102. Если нет (Нет на S100), эта последовательность операций заканчивается.
На S102 CPU 520 начинает активизацию системы зарядки. Например, если CPU 512 выполняет последовательность операций на вышеприведенном S100, CPU 512 отправляет команду для активизации CPU 514 в CPU 514.
На S104 CPU 520 определяет, была или нет завершена активизация системы зарядки. Например, когда CPU 512 принимает ответный сигнал на команду активизации в вышеприведенном S102 из CPU 514, CPU 520 определяет, что активизация системы зарядки была завершена.
На S106 CPU 520 отправляет сигнал управления для включения переключателя SW(2) на переключатель SW(2).
На S108 CPU 520 начинает подготовку к зарядке. Например, CPU 520 определяет, возможна или нет зарядка энергией из кабеля 300 для зарядки, на основании SOC устройства 150 накопления энергии, номинального тока, детектированного по рабочему циклу пилот-сигнала CPLT и тому подобного, а при определении, что зарядка возможна, CPU 520 побуждает конвертер 200 и инверторы 210, 220 ожидать в работоспособном состоянии.
На S110 CPU 520 определяет, была или нет завершена подготовка к зарядке. Если определено, что подготовка к зарядке была завершена (Да на S110), последовательность операций переходит на S112. Если нет (Нет на S110), последовательность операций возвращается на S110 и ожидает до тех пор, пока не завершена подготовка к зарядке.
На S112 CPU 520 отправляет сигнал управления для выключения переключателя SW(1) на переключатель SW(1).
На S114 CPU 520 включает SMR 250 и DFR 260 и запускает зарядку. Как результат электроэнергия переменного тока из источника 402 питания выдается в нейтральную точку 112 первого MG 110 и нейтральную точку 122 второго MG 120, и зарядка устройства 150 накопления энергии таким образом управляется.
На S116 CPU 520 определяет, закончилась или нет зарядка. Например, когда SOC устройства 150 накопления энергии достигает предопределенного значения, CPU 520 определяет, что зарядка закончилась. Если определено, что зарядка закончилась (Да на S116), последовательность операций переходит на S118. Если нет (Нет на S116), последовательность операций возвращается на S116 и ожидает до тех пор, пока не заканчивается зарядка.
На S118 CPU 520 отправляет сигналы управления для выключения переключателей SW(1) и SW(2) на переключатели SW(1) и SW(2) соответственно.
Поведение пилот-сигнала CPLT, управляемого устройством управления зарядкой согласно настоящему варианту осуществления, будет описано на основании вышеприведенной конструкции и блок-схемы последовательности операций способа.
В начале зарядки
В момент T(1) времени, когда пользователь подключает кабель 300 для зарядки к розетке 400 электроснабжения, электроэнергия из источника 402 питания подается в контроллер 334 EVSE, и потенциал пилот-сигнала CPLT поднимается с V(0) (0 вольт) до начального потенциала V(1), как показано на фиг.9.
В момент T(2) времени, когда пользователь подключает кабель 300 для зарядки к зарядному вводу 270 (то есть транспортному средству), пилот-сигнал CPLT вводится в линию L(1) управления пилот-сигнала на стороне транспортного средства.
Обычно переключатель SW(2) не предусмотрен, и согласующий резистивный элемент R(3) постоянно подключен к заземлению 518 транспортного средства. Поэтому в момент T(2) времени, когда кабель 300 для зарядки подключается к зарядному вводу 270, потенциал пилот-сигнала CPLT понижается с начального потенциала V(1) до потенциала V(2) колебаний, и генератор 602 кабеля 300 для зарядки вызывает колебание пилот-сигнала CPLT (см. линию B c чередующимися длинными и короткими пунктирами на фиг.9). По этой причине если предпринимается попытка использовать пилот-сигнал CPLT в качестве сигнала активизации для системы зарядки, должен использоваться сложный преобразователь F/V (частоты в напряжение).
Таким образом, в настоящем варианте осуществления переключатель SW(2) предусмотрен между согласующим резистивным элементом R(3) и заземлением 518 транспортного средства, и в состоянии без зарядки переключатель SW(2) разомкнут, а согласующий резистивный элемент R(3) отсоединен от заземления 518 транспортного средства.
Как результат, как показано сплошной линией A на фиг.9, даже если кабель 300 для зарядки подключен к транспортному средству в момент T(2) времени, потенциал пилот-сигнала CPLT удерживается на начальном потенциале V(1). Поэтому можно без труда определить, что потенциал VL(1) линии L(1) управления пилот-сигнала изменился с V(0) на V(1), не используя сложный преобразователь F/V. Когда потенциал VL(1) изменился с V(0) на V(1) (Да на S100), определяется, что разъем 310 кабеля 300 для зарядки был присоединен к зарядному вводу 270, и активизация системы зарядки может начинаться (S102). Как результат, например, даже если схема для детектирования сигнала PISW подключения кабеля или концевого выключателя 312 в пределах кабеля 300 для зарядки выходит из строя, может надлежащим образом определяться, что кабель 300 для зарядки был подключен к транспортному средству на основании потенциала VL(1) и активизация системы зарядки может начинаться.
Отмечено, что в момент T(3) времени, когда активизация системы зарядки завершена (Да на S104) и переключатель SW(2) замкнут (S106), потенциал пилот-сигнала CPLT понижается до потенциала V(2) колебаний. В момент T(4) времени пилот-сигнал CPLT начинает колебаться, и начинается подготовка к зарядке (S108). В момент T(5) времени, когда подготовка к зарядке завершена (Да на S110) и переключатель SW(1) замкнут (S112), потенциал пилот-сигнала CPLT дополнительно понижается до потенциала V(3). В результате реле 332 в разъеме 310 в кабеле 300 для зарядки замыкается, и дополнительно замыкаются SMR 250 и DFR 260 на стороне транспортного средства, и зарядка начинается (S114).
В конце зарядки
Как показано на фиг.10, в момент T(6) времени, когда зарядка завершена (Да на S116), переключатель SW(1) и переключатель SW(2) размыкаются (S118).
Обычно переключатель SW(2) не предусмотрен, и даже если SW(1) размыкается в момент T(6) времени, когда завершается зарядка, согласующий резистивный элемент R(3) постоянно подключен к заземлению 518 транспортного средства. Поэтому потенциал пилот-сигнала CPLT поднимается только от V(3) до потенциала V(2) колебаний, и пилот-сигнал CPLT продолжает колебание даже после завершения зарядки (см. линию B с чередующимися длинными и короткими пунктирами на фиг.10), которая является такой же, как состояние когда кабель 300 для зарядки подключен к транспортному средству в начале зарядки (см. линию B с чередующимися длинными и короткими пунктирами на фиг.9). Поэтому требуется новая последовательность операций для предотвращения перезарядки.
Таким образом, в настоящем варианте осуществления переключатель SW(2) предусмотрен между согласующим резистивным элементом R(3) и заземлением 518 транспортного средства, и при завершении зарядки переключатели SW(1) и SW(2) размыкаются, и оба согласующих резистивных элемента R(2) и R(3) отсоединяются от заземления 518 транспортного средства. Более того, если потенциал VL(1) линии L(1) управления пилот-сигнала не изменяется с потенциала V(0) на начальный потенциал V(1), активизация зарядной системы не начинается (Нет на S100).
Как результат, как показано сплошной линией A на фиг.10, потенциал VL(1) линии L(1) управления пилот-сигнала не изменяется с потенциала V(0) на начальный потенциал V(1) при завершении зарядки. Поэтому активизация системы зарядки не начинается (Нет на S100), и перезарядка не выполняется. Как результат перезарядка или чрезмерная разрядка после завершения зарядки могут быть предотвращены, не требуя новой последовательности операций для предотвращения перезарядки.
Как описано выше, согласно устройству управления зарядкой по настоящему варианту осуществления, согласующий резистивный элемент для изменения потенциала пилот-сигнала CPLT, выдаваемого из генератора, предусмотренного в кабеле для зарядки, с начального потенциала V(1) на потенциал V(2) колебаний предусмотрен на стороне транспортного средства, и переключатель предусмотрен между этим согласующим резистивным элементом и заземлением транспортного средства. В состоянии без зарядки согласующий резистивный элемент отсоединен от заземления транспортного средства. Как результат даже если кабель для зарядки подключен к транспортному средству, пилот-сигнал CPLT не колеблется, и потенциал пилот-сигнала CPLT удерживается на начальном потенциале V(1). Поэтому может без труда определяться, что потенциал линии управления пилот-сигнала изменился на начальный потенциал V(1). Таким образом, пилот-сигнал CPLT может без труда использоваться в качестве сигнала активизации для системы зарядки.
Модификация первого варианта осуществления
В устройстве управления зарядкой согласно описанному выше первому варианту осуществления таймер 406 зарядки может быть установлен между штепселем 320 и розеткой 400 электроснабжения, как показано на фиг.11.
Этот таймер 406 зарядки является недорогим таймером, который типично доступен для коммерческого приобретения. Таймер 406 зарядки прерывает подачу электроэнергии из источника 402 питания в кабель 300 для зарядки до тех пор, пока не наступает время начала зарядки, и начинает подачу электроэнергии из источника 402 питания в кабель 300 для зарядки, когда наступает время начала зарядки. Отмечено, что таймер 406 зарядки может включать в себя функцию прерывания подачи электроэнергии из источника 402 питания, когда наступает время окончания зарядки, предварительно выбранное пользователем.
Поведение пилот-сигнала CPLT и сигнала PISW подключения кабеля, когда используется такой таймер 406 зарядки, будет описано со ссылкой на фиг.12.
Уровень сигнала у сигнала PISW подключения кабеля изменяется с высокого уровня на низкий уровень в момент T(7) времени, когда пользователь заблаговременно подключает кабель 300 для зарядки к транспортному средству, и остается на низком уровне, даже когда наступает предварительно выбранный момент T(8) времени начала зарядки. Поэтому сигнал PISW подключения кабеля не может использоваться в качестве сигнала активизации для системы зарядки, когда используется таймер 406 зарядки.
С другой стороны, потенциал пилот-сигнала CPLT поддерживается на V(0) (0 вольт), как показано на фиг.12, так как электроэнергия из источника 402 питания не подается на контроллер 334 EVSE до тех пор, пока не наступает предварительно выбранный момент T(8) времени начала зарядки. После этого когда наступает момент T(8) времени начала зарядки, электроэнергия из источника 402 питания подается на контроллер 334 EVSE, а потенциал пилот-сигнала CPLT изменяется с V(0) на начальный потенциал V(1), как показано на фиг.12. До момента T(9) времени, когда замыкается переключатель SW(2), потенциал пилот-сигнала CPLT удерживается на начальном потенциале V(1), как в описанном выше первом варианте осуществления. Поэтому может без труда определяться, что потенциал VL(1) изменился с V(0) на V(1). Когда потенциал VL(1) изменился с потенциала V(0) на начальный потенциал V(1) (Да на S100), начинается активизация системы зарядки (S102).
Как описано выше, простое присоединение доступного для коммерческого приобретения и недорогого таймера зарядки между штепселем 320 и розеткой 400 электроснабжения, без обеспечения функции таймера зарядки на стороне транспортного средства предоставляет возможность зарядки во время начала зарядки (например, ночное время, когда плата за электроэнергию является недорогой), предварительно выбранное пользователем.
Второй вариант осуществления
Устройство управления зарядкой согласно настоящему варианту осуществления будет описано в дальнейшем. Конфигурация устройства управления зарядкой согласно настоящему варианту осуществления отлична от таковой у устройства управления зарядкой согласно описанному выше первому варианту осуществления по той причине, что CPU 520 дополнительно выполняет программу, имеющую структуру управления, показанную на фиг.14, которая будет описана в дальнейшем, в дополнение к вышеприведенной программе, имеющей структуру управления, показанную на фиг.8. Оставшаяся конфигурация устройства управления зарядкой согласно настоящему варианту осуществления является такой же, как у устройства управления зарядкой согласно описанному выше первому варианту осуществления. Их функции также являются одинаковыми. Соответственно подробное описание о них здесь повторяться не будет.
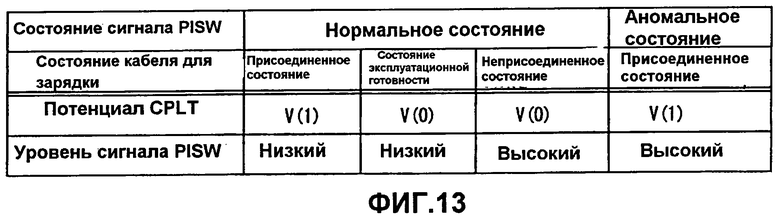
Фиг.13 изображает таблицу, представляющую потенциал пилот-сигнала CPLT и уровень сигнала PISW подключения кабеля в состоянии сигнала PISW подключения кабеля и состоянии кабеля 300 для зарядки. На фиг.13 аномальное состояние указывается ссылкой на состояние сигнала у сигнала PISW подключения кабеля, когда концевой выключатель 312 выходит из строя, или оборвана сигнальная линия L(2). Подключенное состояние означает, что кабель 300 для зарядки подключен к транспортному средству и источнику 402 питания, а неподключенное состояние означает, что кабель 300 для зарядки не подключен к обоим - транспортному средству и источнику 402 питания. В дополнение состояние эксплуатационной готовности указывается ссылкой на состояние, когда электроэнергия из источника 402 питания не подается в кабель 300 для зарядки, хотя кабель 300 для зарядки аккумулятора и транспортное средство соединены (состояние, когда кабель 300 для зарядки не подключен к источнику 402 питания, состояние, когда время начала зарядки таймера зарядки еще не наступило, хотя кабель 300 для зарядки подключен к источнику 402 питания, состояние, когда электроэнергия не подается на источник 402 питания вследствие нарушения питания, хотя кабель 300 для зарядки подключен к источнику 402 питания, и тому подобное). Отмечено, что все значения пилот-сигнала CPLT являются нормальными.
Как ясно из фиг.13, сигнал PISW подключения кабеля может устанавливаться в высокий уровень в обоих - нормальном состоянии и аномальном состоянии. Только когда сигнал PISW подключения кабеля находится в аномальном состоянии (состоянии, когда выходит из строя конечный выключатель 312, или оборвана сигнальная линия L(2)), такой сигнал PISW подключения кабеля устанавливается в высокий уровень, хотя потенциал пилот-сигнала CPLT находится на начальном потенциале V(1). Таким образом, устройство управления зарядкой согласно настоящему варианту осуществления сравнивает сигнал PISW подключения кабеля и пилот-сигнал CPLT и выявляет аномалию в сигнале PISW подключения кабеля (то есть неисправность концевого выключателя 312 или обрыв в сигнальной линии L(2)).
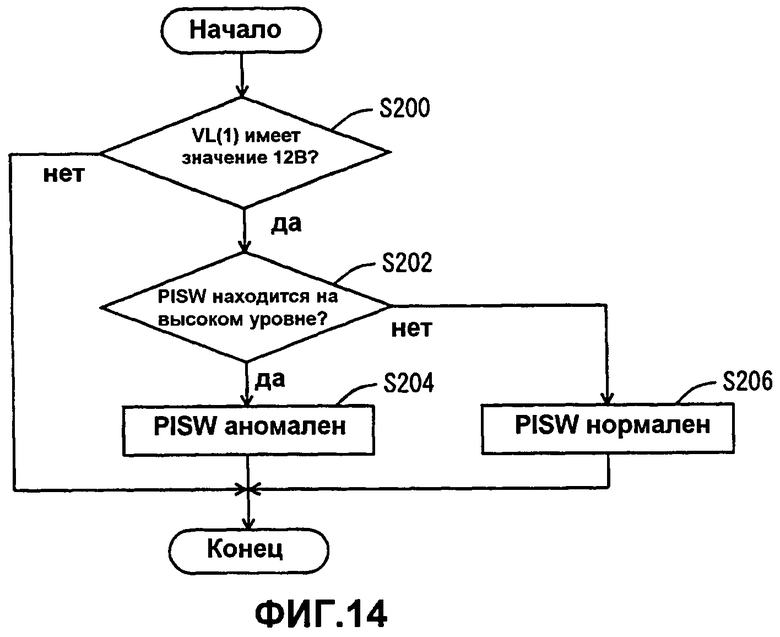
Структура управления программы, выполняемой CPU 520, который конфигурирует устройство управления зарядкой согласно настоящему варианту осуществления, будет описана со ссылкой на фиг.14.
На S200 CPU 520 определяет, находится или нет потенциал VL(1) линии L(1) управления пилот-сигнала на начальном потенциале V(1). Если потенциал VL(1) линии L(1) управления пилот-сигнала находится на начальном потенциале V(1) (Да на S200), последовательность операций переходит на S202. Если нет (Нет на S200), эта последовательность операций заканчивается.
На S202 CPU 520 определяет, находится или нет сигнал PISW подключения кабеля на высоком уровне. Если сигнал PISW подключения кабеля находится на высоком уровне (Да на S202), последовательность операций переходит на S204. Если нет (Нет на S202), эта последовательность операций переходит на S206.
На S204 CPU 520 определяет, что сигнал PISW подключения кабеля аномален, и концевой выключатель 312 выведен из строя или сигнальная линия L(2) оборвана. На S206 CPU 520 определяет, что сигнал PISW подключения кабеля нормален.
Выявление аномалии в сигнале PISW подключения кабеля устройством управления зарядкой согласно настоящему варианту осуществления будет описано на основании вышеприведенной конструкции и блок-схемы последовательности операций способа.
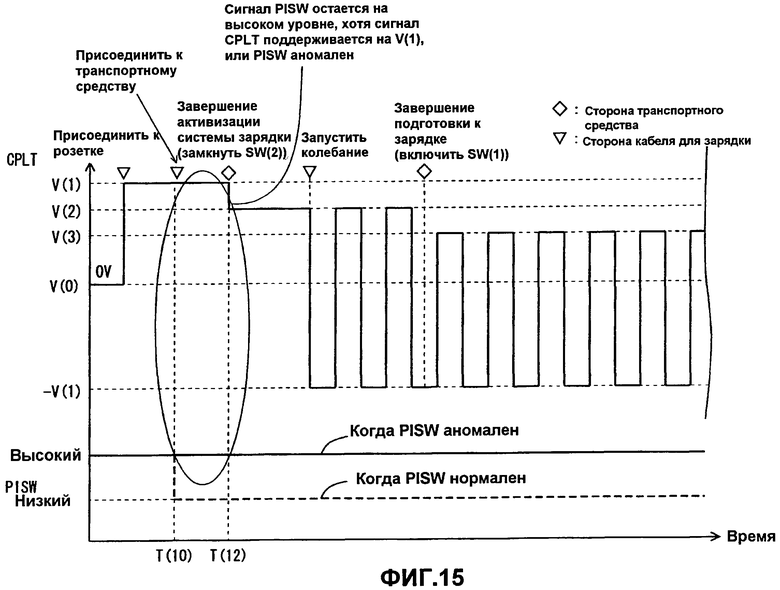
Как показано на фиг.15, когда сигнал PISW подключения кабеля поддерживается на высоком уровне, хотя пилот-сигнал CPLT поддерживается на V(1) (Да на S200, Да на S202) с момента T(10) времени, когда кабель 300 для зарядки присоединен к транспортному средству, до момента T(12) времени, когда замыкается переключатель SW(2), определяется, что сигнал PISW подключения кабеля является аномальным, и концевой выключатель 312 выходит из строя, или оборвана сигнальная линия L(2) (S204).
Как описано выше, согласно устройству управления зарядкой по настоящему варианту осуществления переключатель предусмотрен между заземлением транспортного средства и согласующим резистивным элементом для изменения потенциала пилот-сигнала CPLT с начального потенциала V(1) на потенциал V(2) колебаний, и согласующий резистивный элемент отсоединен от заземления транспортного средства в состоянии без зарядки. Поэтому может без труда определяться, что потенциал линии управления пилот-сигнала удерживается на начальном потенциале V(1). Когда детектировано, что сигнал PISW подключения кабеля остается на высоком уровне, хотя пилот-сигнал CPLT удерживается на начальном потенциале V(1), может определяться, что сигнал PISW подключения кабеля является аномальным. Поэтому пилот-сигнал CPLT может без труда использоваться для выявления аномалии в сигнале PISW подключения кабеля.
Третий вариант осуществления
Устройство управления зарядкой согласно настоящему варианту осуществления будет описано в дальнейшем. Конфигурация устройства управления зарядкой согласно настоящему варианту осуществления отлична от таковой у устройства управления зарядкой согласно описанному выше первому варианту осуществления по той причине, что CPU 520 дополнительно выполняет программу, имеющую структуру управления, показанную на фиг.16, которая будет описана в дальнейшем для детектирования нарушения питания и восстановления от нарушения питания, в дополнение к программе, имеющей вышеприведенную структуру управления, показанную на фиг.8. Оставшаяся конфигурация устройства управления зарядкой согласно настоящему варианту осуществления является такой же, как у устройства управления зарядкой согласно описанному выше первому варианту осуществления. Их функции также являются одинаковыми. Соответственно подробное описание о них здесь повторяться не будет.
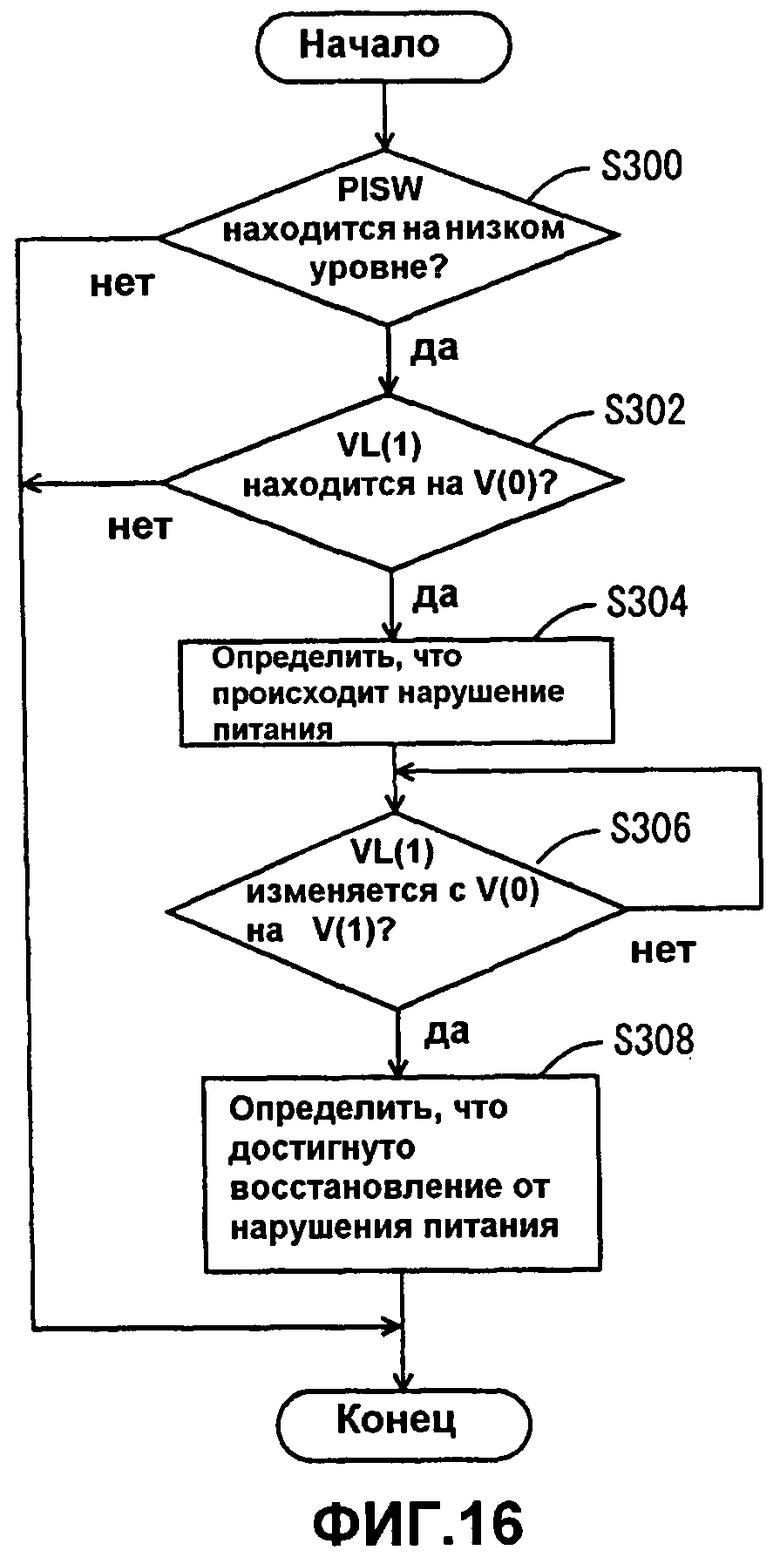
Структура управления программы, выполняемой CPU 520, который конфигурирует устройство управления зарядкой согласно настоящему варианту осуществления, будет описана со ссылкой на фиг.16.
На S300 CPU 520 определяет, находится или нет сигнал PISW подключения кабеля на низком уровне. Если сигнал PISW подключения кабеля находится на низком уровне (Да на S300), последовательность операций переходит на S302. Если нет (Нет на S300), эта последовательность операций заканчивается.
На S302 CPU 520 определяет, находится или нет потенциал VL(1) линии L(1) управления пилот-сигнала на потенциале V(0). Если потенциал VL(1) линии L(1) управления пилот-сигнала находится на потенциале V(0) (Да на S302), последовательность операций переходит на S304. Если нет (Нет на S302), эта последовательность операций заканчивается.
На S304 CPU 520 определяет, что произошло нарушение питания. Отмечено, что нарушение питания здесь указывается ссылкой на состояние, когда прекращена подача электроэнергии на источник 402 питания.
На S306 CPU 520 определяет, изменился или нет потенциал VL(1) линии L(1) управления пилот-сигнала с потенциала V(0) на начальный потенциал V(1). Если потенциал VL(1) линии L(1) управления пилот-сигнала изменился с потенциала V(0) на начальный потенциал V(1) (Да на S306), последовательность операций переходит на S308. Если нет (Нет на S306), последовательность операций возвращается на S306 и ожидает до тех пор, пока потенциал VL(1) линии L(1) управления пилот-сигнала не изменится с потенциала V(0) на начальный потенциал V(1).
На S308 CPU 520 определяет, что было достигнуто восстановление от нарушения питания. Другими словами, CPU 520 определяет, что была возобновлена подача электроэнергии на источник 402 питания.
Определение нарушения питания и восстановления от нарушения питания устройством управления зарядкой согласно настоящему варианту осуществления будет описано на основании вышеприведенной конструкции и блок-схемы последовательности операций способа.
Как показано на фиг.17, в момент T(13) времени, когда кабель 300 для зарядки присоединяется к транспортному средству, сигнал PISW подключения кабеля изменяется с высокого уровня на низкий уровень. Потенциал пилот-сигнала CPLT, однако, остается на потенциале V(0) вследствие нарушения питания до момента T(14) времени, когда достигается восстановление от нарушения питания. Таким образом, когда потенциал VL(1) линии L(1) управления пилот-сигнала поддерживается на потенциале V(0), хотя сигнал PISW подключения кабеля находится на низком уровне (Да на S300, Да на S302), определяется, что произошло нарушение питания (S304).
Когда восстановление от нарушения питания достигается в следующий момент T(14) времени, потенциал пилот-сигнала CPLT автоматически изменяется с потенциала V(0) на начальный потенциал V(1), как показано на фиг.17. Когда детектируется, что потенциал VL(1) линии L(1) управления пилот-сигнала изменился на начальный потенциал V(1) (Да на S306), определяется, что было достигнуто восстановление от нарушения питания (S308). Отмечено, что также в момент времени восстановления от нарушения питания потенциал пилот-сигнала CPLT удерживается на начальном потенциале V(1) до тех пор, пока не замыкается переключатель SW(2), как в описанном выше первом варианте осуществления.
Как описано выше, согласно устройству управления зарядкой по настоящему варианту осуществления переключатель предусмотрен между заземлением транспортного средства и согласующим резистивным элементом для изменения потенциала пилот-сигнала CPLT с начального потенциала V(1) на потенциал V(2) колебаний, и согласующий резистивный элемент отсоединен от заземления транспортного средства в состоянии без зарядки. Поэтому может без труда определяться, что потенциал линии управления пилот-сигнала удерживается на начальном потенциале V(1). Когда детектируется, что потенциал VL(1) линии L(1) управления пилот-сигнала изменился с потенциала V(0) на начальный потенциал V(1) наряду с тем, что сигнал PISW подключения кабеля находится на низком уровне, может быть определено, что было достигнуто восстановление от нарушения питания. Более того, также в момент времени восстановления от нарушения питания активизация системы зарядки может начинаться в ответ на изменение потенциала VL(1) линии L(1) управления пилот-сигнала с потенциала V(0) на начальный потенциал V(1). Поэтому зарядка может начинаться без необходимости в трудной операции, такой как вставка и выемка пользователем кабеля 300 для зарядки вновь, в момент времени восстановления от нарушения питания, что может повысить удобство для пользователя.
Должно быть понятно, что варианты осуществления, раскрытые в материалах настоящей заявки, являются иллюстративными и не ограничивающими ни в каких отношениях. Объем настоящего изобретения определен скорее терминами формулы изобретения, чем вышеприведенного описания, и подразумевается включающим в себя любые модификации в пределах объема и смысла, эквивалентных терминам формулы изобретения.
ОПИСАНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ:
100 двигатель;
110 первый MG;
112, 122 нейтральная точка;
120 второй MG;
130 устройство деления мощности;
140 редуктор;
150 устройство накопления энергии;
160 ведущее колесо;
170 ECU;
171 датчик напряжения;
172 датчик тока;
200 конвертер;
210 первый инвертор;
220 второй инвертор;
250 SMR;
260 DFR;
270 зарядный ввод;
280 LC-фильтр;
300 кабель для зарядки;
310 разъем;
312 концевой выключатель;
320 штепсель;
330 CCID;
332 реле;
334 контроллер EVSE;
400 розетка электроснабжения;
402 источник питания;
406 таймер зарядки;
502 резистивная схема;
508, 510 входной буфер;
512, 514, 520 CPU;
516 источник питания;
518 заземление транспортного средства;
522 блок детектирования VL(1);
524 блок управления зарядкой;
602 генератор;
604 датчик напряжения;
606 электромагнитная катушка;
608 детектор утечки;
R(1) резистивный элемент;
R(2), R(3) согласующий резистивный элемент;
SW(1), SW(2) переключатель;
L(1) линия управления пилот-сигнала;
L(2) сигнальная линия.
Изобретение относится к устройству управления зарядкой транспортного средства. Устройство содержит линию управления пилот-сигнала, резистивный элемент, блок переключения, блок управления. Резистивный элемент подключен между линией управления пилот-сигнала и заземлением транспортного средства. Блок переключения подключен между линией управления пилот-сигнала и резистивным элементом либо между резистивным элементом и заземлением транспортного средства. Блок управления предназначен для запуска активизации системы зарядки на основании потенциала линии управления пилот-сигнала. Блок управления переключает блок переключения в разъединенное состояние при соединении кабеля для зарядки и транспортного средства. Технический результат заключается в обеспечении детектирования аномалии и управления зарядкой посредством использования пилот-сигнала. 5 з.п. ф-лы, 17 ил.
1. Устройство управления зарядкой для транспортного средства, включающего в себя систему зарядки для зарядки устройства (150) накопления энергии электроэнергией, подаваемой из источника (402) питания, внешнего по отношению к транспортному средству, через кабель (300) для зарядки, причем транспортное средство принимает пилот-сигнал (CPLT) из генератора (602), предусмотренного в кабеле (300) для зарядки, когда кабель (300) для зарядки соединяет источник (402) питания и транспортное средство, причем генератор (602) конфигурирован для создания колебаний пилот-сигнала (CPLT) по длительности импульса, на основании величины номинального тока, который может подаваться в транспортное средство, в ответ на изменение потенциала пилот-сигнала (CPLT) с начального потенциала в потенциал колебания, при этом устройство управления зарядкой содержит линию (L(1)) управления пилот-сигнала, в которую вводится пилот-сигнал (CPLT), когда кабель (300) для зарядки присоединен к транспортному средству, резистивный элемент (R(3)), подключенный между линией (L(1)) управления пилот-сигнала и заземлением транспортного средства, для изменения потенциала пилот-сигнала (CPLT) с начального потенциала в потенциал колебания, блок (SW(2)) переключения, подключенный между линией (L(1)) управления пилот-сигнала и резистивным элементом (R(3)) либо между резистивным элементом (R(3)) и заземлением транспортного средства и переключаемый в любое одно из разъединенного состояния, когда резистивный элемент (R(3)) отсоединен от любого одного из линии (L(1)) управления пилот-сигнала и заземления транспортного средства, и соединенного состояния, когда резистивный элемент (R(3)) присоединен к линии (L(1)) управления пилот-сигнала и заземлению транспортного средства, и блок (520) управления для запуска активизации системы зарядки на основании потенциала линии (L(1)) управления пилот-сигнала, при этом блок (520) управления переключает блок (SW(2)) переключения в разъединенное состояние, по меньшей мере, при соединении кабеля (300) для зарядки и транспортного средства.
2. Устройство по п.1, в котором блок (520) управления конфигурирован для переключения блока (SW(2)) переключения в разъединенное состояние при соединении кабеля (300) для зарядки и транспортного средства и переключения блока (SW(2)) переключения в соединенное состояние по завершении активизации системы зарядки.
3. Устройство по п.1, в котором блок (520) управления дополнительно конфигурирован для определения, присоединен или нет кабель (300) для зарядки к транспортному средству, на основании наличия или отсутствия пилот-сигнала (CPLT).
4. Устройство по п.1, в котором транспортное средство выполнено с возможностью приема сигнала (PISW) соединения, чьи выходные данные изменяются в соответствии с состоянием соединения между кабелем (300) для зарядки и транспортным средством, и блок (520) управления дополнительно выполнен с возможностью детектирования аномалии в сигнале (PISW) соединения на основании результата сравнения между сигналом (PISW) соединения и пилот-сигналом (CPLT).
5. Устройство по п.1, в котором транспортное средство выполнено с возможностью приема сигнала (PISW) соединения, чьи выходные данные изменяются в соответствии с состоянием соединения между кабелем (300) для зарядки и транспортным средством, и блок (520) управления дополнительно выполнен с возможностью детектирования, по меньшей мере, любого одно из прекращения подачи электроэнергии на источник (402) питания и перезапуска подачи электроэнергии на источник (402) питания, на основании потенциала линии (L(1)) управления пилот-сигнала, когда определено, что кабель (300) для зарядки присоединен к транспортному средству, на основании сигнала (PISW) соединения.
6. Устройство по п.1, в котором пилот-сигнал (CPLT) вводится в линию (L(1)) управления пилот-сигнала, когда наступает зарезервированное время зарядки, установленное на таймере (406) для резервирования зарядки транспортного средства, наряду с тем, что кабель (300) для зарядки присоединен к транспортному средству и присоединен к источнику (402) питания с таймером (406), включенным в разрыв.
| ЭЛЕКТРОМОБИЛЬ | 1992 |
|
RU2048309C1 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С АСИНХРОННЫМ СТАРТЕР-ГЕНЕРАТОРОМ | 2004 |
|
RU2282301C2 |
| JP 7123519 А, 12.05.1995 | |||
| JP 7255105 А, 03.10.1995. | |||

