Настоящее изобретение относится к способу контроля пиломатериалов и устройству для его осуществления, предназначенных для обнаружения дефектных участков вследствие изменения цвета, которые существуют в материалах на основе дерева, таких как шпон или отрезанные от деревянного бревна заготовки или т.п. Например, при изготовлении клееной фанеры бревно разрезают с использованием режущего инструмента для последовательного получения листов шпона толщиной в несколько миллиметров. Затем листы шпона обрезают до заданного размера и после сушки несколько листов шпона скрепляют в единое целое путем ламинирования с использованием клея. Во время указанных технологических процессов необходимо сортировать листы шпона на листы, которые пойдут на внешние слои клееной фанеры, или, другими словами, листы с небольшими или эстетически незначимыми дефектами и листы, которые пойдут на внутренние слои, или, другими словами, листы со многими, хотя и не проблемными, но эстетически значимыми дефектами, в соответствии с расположением, количеством, размерами и т.п. дефектов, которые влияют на качество шпона (например, дефекты, образующиеся вследствие изменения цвета поверхности шпона, деформации, отверстия в шпоне, образованные выпавшими сучьями, а также трещины). Такая сортировка включает в себя классификацию, например, на пять-семь сортов.
Уровень техники
Обычно процесс сортировки шпона на листы, которые пойдут на поверхностные слои клееной фанеры, и листы, которые пойдут на ее внутренние слои, включает определение невооруженным глазом качества листов шпона, транспортируемых конвейером.
Вдобавок известный способ контроля дефектных участков в пиломатериале включает в себя: захват изображения пиломатериала с помощью цветной камеры на приборах с зарядовой связью (ПЗС); сравнение видеосигнала с эталонными цветами смолы и эталонными образцами изменения цвета с использованием устройства выделения цветного изображения; и преобразование видеосигнала в двоичную форму, маркирование преобразованного в двоичную форму изображения, соответствующего контролируемой области, и сопоставление преобразованного в двоичную форму изображения с допустимым значением, чтобы обнаружить дефектные участки, включая, например, смолу, гниль и изменения цвета (см. Патентный документ 1).
Патентный документ 1: выложенная патентная заявка Японии №09-210785.
Сущность изобретения
Проблемы, решаемые изобретением
С известными способами, описанными выше, связаны следующие проблемы.
Определение качества невооруженным глазом является неточным из-за разброса в оценках разными людьми и отличается низкой производительностью, поскольку нельзя увеличивать скорость конвейера.
Вдобавок известный способ контроля дефектных участков в пиломатериале, который содержит сравнение с эталонным цветом и выполнение преобразования в двоичную форму, не включает в себя точный контроль дефектов с использованием цветового распределения.
Целью настоящего изобретения является решение указанных проблем известного уровня техники и предоставление возможности точного обнаружения дефектных участков, образовавшихся вследствие изменения цвета поверхности пиломатериала, которые влияют на качество пиломатериала, с использованием цветового распределения из захваченного изображения пиломатериала, например шпона, захваченного средством формирования изображения, даже в том случае, если появились изменения цветности, яркости и т.п. аномального участка.
Средства решения проблем
На фиг. 1 показана примерная схема сортировщика шпона. На фиг. 1 ссылочная позиция 1 обозначает процессор изображения (средство обработки изображения), 2 обозначает контроллер сортировщика, 3 обозначает операционную панель, 4 обозначает ленточный конвейер, 5 обозначает облучение для проходящего света, 6 обозначает облучение для отраженного света, 7 обозначает сортировочное устройство, 8 обозначает камеру с однострочным датчиком (средство формирования изображения), а 9 обозначает шпон (пиломатериал).
Для решения вышеописанных проблем настоящее изобретение сконфигурировано следующим образом.
(1) Средство 8 формирования изображения захватывает цветное изображение пиломатериала 9. Средство 1 обработки изображения получает цветовое распределение цветного изображения, захваченного средством 8 формирования изображения, сравнивает полученное цветовое распределение с заранее определенным распределением цветов для нормального пиломатериала, оценивает полученное цветовое распределение как аномальное в случае его отклонения от цветового распределения нормального пиломатериала на заранее определенную величину или более и определяет в качестве дефекта пиломатериала зону на поверхности пиломатериала, захваченную средством 8 формирования изображения, где аномальное цветовое распределение превышает заранее определенную величину. Таким образом, используя цветовое распределение, можно точно обнаружить дефектные участки, образовавшиеся вследствие изменения цвета поверхности пиломатериала, которые влияют на качество пиломатериала.
(2) В вышеописанном способе контроля пиломатериала или устройстве согласно (1) при установке в качестве объекта контроля пиломатериала, в котором площадь дефектной зоны мала по отношению к площади объекта контроля, распределения изображений, полученные по каждому объекту, используют как взаимозаменяемые в качестве заранее определенных распределений цветов нормального пиломатериала. Следовательно, можно легко получить заранее определенные цветовые распределения нормального пиломатериала.
(3) В вышеописанном способе контроля пиломатериала или устройстве согласно (1) или (2) участок с аномальной яркостью обнаруживают путем получения гистограммы яркости для цветового распределения захваченного цветного изображения. Таким образом, можно легко обнаружить участок с аномальной яркостью, например ожог.
(4) В вышеописанном способе контроля пиломатериала или устройстве согласно (3) предполагается, что полная гистограмма яркости заранее определенного цветового распределения для нормального пиломатериала соответствует нормальному распределению, и полное нормальное распределение оценивают исходя из кумулятивной частоты частичной области. Следовательно, цветовое распределение для нормального пиломатериала можно оценить исходя из контролируемого пиломатериала, подлежащего контролю, без необходимости предварительного определения цветового распределения нормального пиломатериала.
Преимущества изобретения
Настоящее изобретение имеет следующие положительные эффекты.
(1) Средство обработки изображения получает цветовое распределение цветного изображения, захваченного средством формирования изображения, сравнивает полученное цветовое распределение с заранее определенным цветовым распределением для нормального пиломатериала, оценивает полученное цветовое распределение как аномальное распределение при его отклонении от цветового распределения нормального пиломатериала на заранее определенную величину или более и определяет в качестве дефекта пиломатериала зону на поверхности пиломатериала, захваченную средством формирования изображения, где аномальное цветовое распределение превышает заранее определенную величину. Таким образом, используя цветовое распределение, можно точно обнаружить дефектные участки, образовавшиеся вследствие изменения цвета поверхности пиломатериала, которые влияют на качество пиломатериала.
(2) При установке в качестве объекта контроля пиломатериала, в котором дефектная зона мала по отношению к площади объекта контроля, распределения изображений, полученные по каждому объекту контроля, используют как взаимозаменяемые в качестве заранее определенных распределений цветов нормального пиломатериала. Следовательно, можно легко получить заранее определенные цветовые распределения нормального пиломатериала.
(3) Поскольку участок с аномальной яркостью обнаруживают путем получения гистограммы яркости для цветового распределения захваченного цветного изображения, можно легко обнаружить участок с аномальной яркостью, такой как ожог.
(4) Предполагается, что полная гистограмма яркости заранее определенного цветового распределения для нормального пиломатериала соответствует нормальному распределению, и полное нормальное распределение оценивают исходя из кумулятивной частоты частичной области. Следовательно, цветовое распределение для нормального пиломатериала можно оценить исходя из пиломатериала, подлежащего контролю, без необходимости предварительного определения цветового распределения нормального пиломатериала.
Краткое описание чертежей
Фиг. 1 - примерная схема сортировщика шпона согласно настоящему изобретению;
фиг. 2 - примерная схема процессора изображения согласно настоящему изобретению;
фиг. 3 - примерная диаграмма, показывающая преобразование цветов соответствующих точек изображения на плоскости HS согласно настоящему изобретению;
фиг. 4 - примерная блок-схема релаксации согласно настоящему изобретению;
фиг. 5 - примерная диаграмма цветового распределения в цветовом пространстве HSC согласно настоящему изобретению;
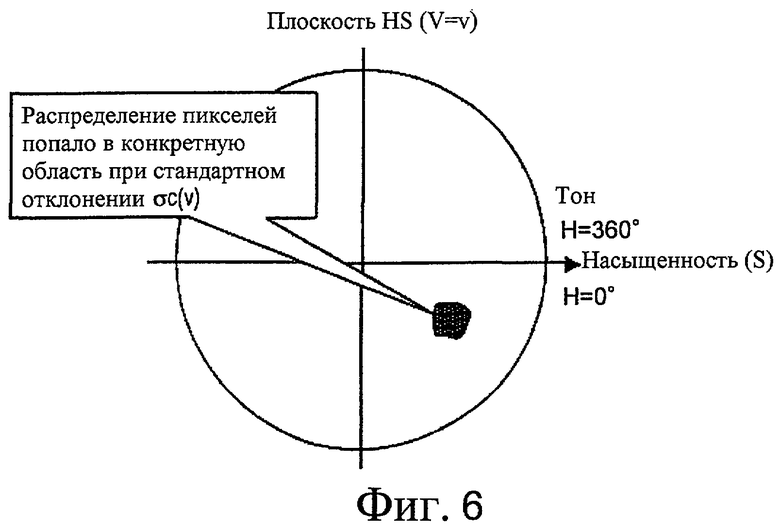
фиг. 6 - примерная диаграмма распределения пикселей на конкретной плоскости яркости v согласно настоящему изобретению;
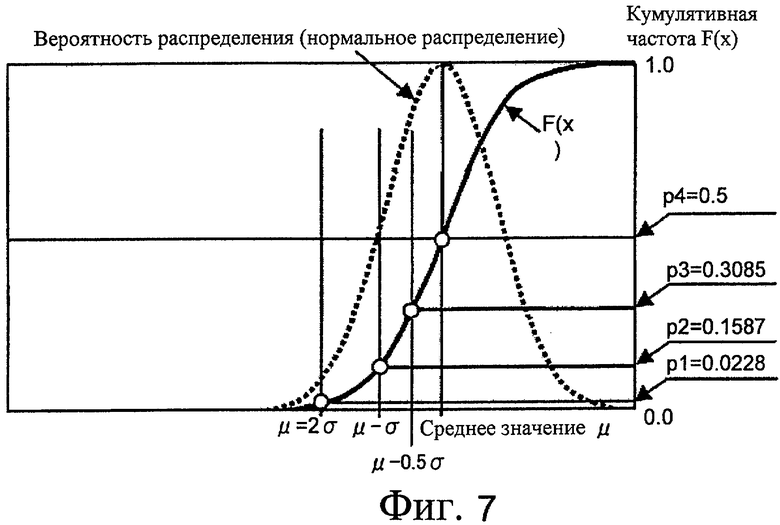
фиг. 7 - примерная диаграмма кумулятивной частоты F(x) нормального распределения согласно настоящему изобретению;
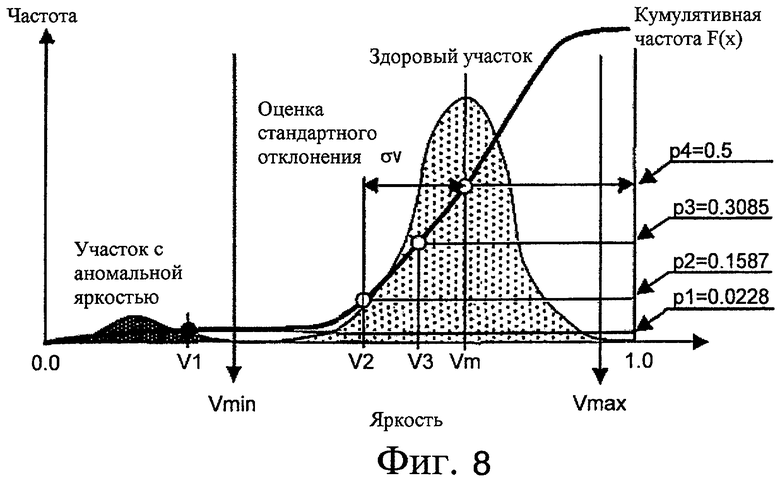
фиг. 8 - примерная диаграмма распределения пикселей (профиль нормального распределения) в направлении центральной оси согласно настоящему изобретению;
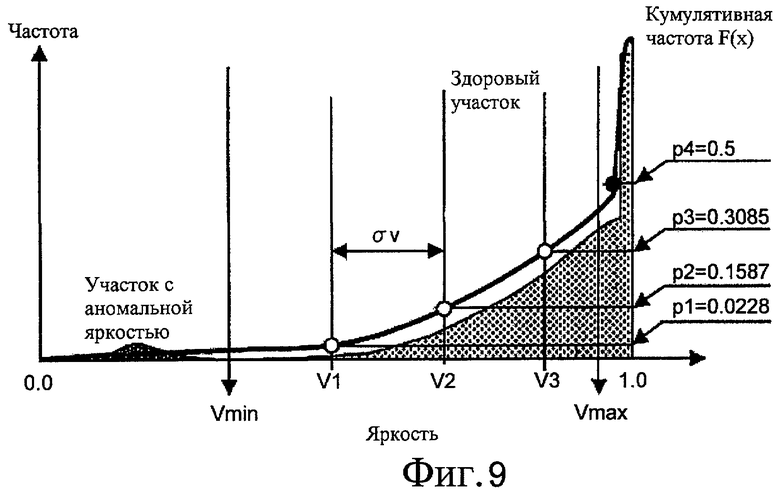
фиг. 9 - примерная диаграмма для оценки среднего значения Vm согласно настоящему изобретению;
фиг. 10 - примерная диаграмма для случая, когда участок с аномальной яркостью занимает большую площадь согласно настоящему изобретению.
Описание символов
1 обозначает процессор изображения (средство обработки изображения);
2 обозначает контроллер сортировщика;
3 обозначает операционную панель;
4 обозначает ленточный конвейер;
5 обозначает излучение для проходящего света (средство облучения);
6 обозначает излучение для отраженного света (средство облучения);
7 обозначает сортировочное устройство;
8 обозначает камеру с однострочным датчиком (средство формирования изображения);
9 обозначает шпон (пиломатериал).
Наилучший вариант осуществления изобретения
(1) Описание сортировщика шпона
На фиг. 1 показана примерная схема сортировщика шпона. На этой фигуре представлена полная конфигурация сортировщика шпона. Сортировщик шпона включает в себя процессор 1 изображения, контроллер 2 сортировщика, операционную панель 3, ленточный конвейер 4, облучение 5 для проходящего света, облучение 6 для отраженного света, сортировочное устройство 7 и камеру 8 с однострочным датчиком.
Процессор 1 изображения обрабатывает данные изображения, получаемые из камеры 8 с однострочным датчиком, и выводит в контроллер 2 сортировщика результаты обработки, например класс качества шпона. Контроллер 2 сортировщика выдает сигналы управления конвейером сортировщика, например, для приведения в движение и остановки конвейера, а также сигналы управления для сортировочного устройства 7 в ответ на выходной сигнал процессора 1 изображения. Операционная панель 3 предназначена для выполнения таких операций, как изменение уставок процессора 1 изображения и управление контроллером 2 сортировщика. Ленточный конвейер 4 выполняет транспортировку шпона 9. Облучение 5 для проходящего света представляет собой облучающее средство (источник света), например светоизлучающий диод (LED), для обнаружения отверстий, трещин и т.п. в шпоне 9, причем его облучение отличается по цвету (например, зеленое излучение) от облучения 6 для отраженного света. Это делается для того, чтобы различать (по цвету и интенсивности) проходящий свет от отраженного света, поступающего от облучающего средства 6 для отраженного света, для обнаружения в шпоне отверстий (от сучков), трещин и т.п. Облучение 6 для отраженного света представляет собой облучающее средство (источник света), такое как LED, для обнаружения света, отраженного от шпона 9, причем обычно используют белое излучение. Камера 8 с однострочным датчиком захватывает строчные изображения шпона 9.
Функционирование сортировщика шпона включает захват изображения шпона 9, транспортируемого ленточным конвейером 4 с помощью камеры 8 с однострочным датчиком, и вывод данных изображения в процессор 1 изображения. Процессор 1 изображения обрабатывает данные изображения и выводит на контроллер 2 сортировщика результаты обработки, например класс качества шпона. Контроллер 2 сортировщика выдает сигнал управления в сортировочное устройство 7 и сортирует фанеру 9 согласно классификации качества. Сортировку выполняют в соответствии с количеством червоточин, отверстий или выпавших сучков, свежих сучков, засохших сучков, обзола, трещин, смолы и карманов с корой, синей гнили, деформаций (коробления) и т.п., а также в соответствии с их размерами.
(2) Описание процесса изображения
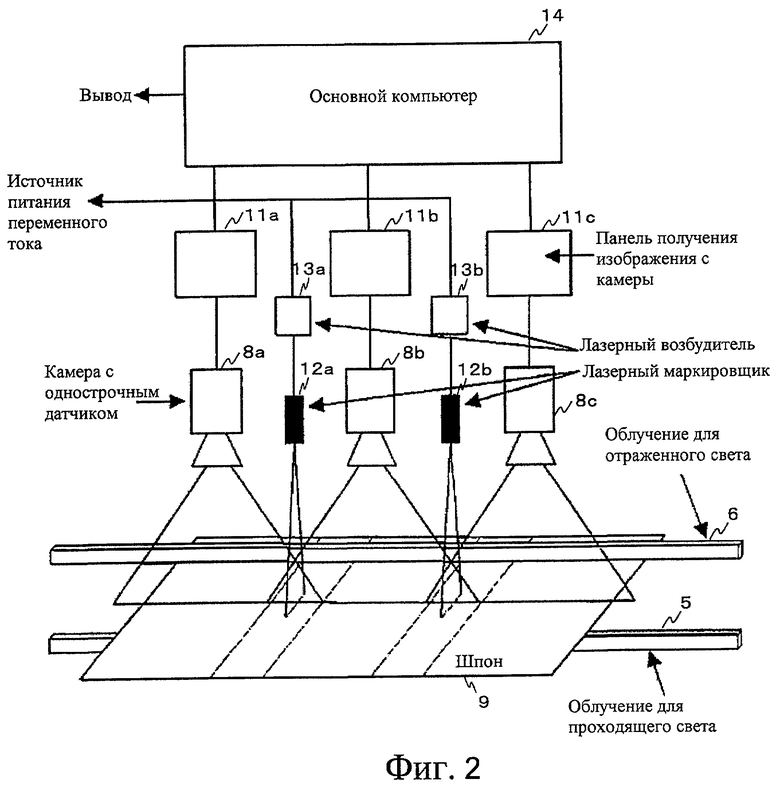
На фиг. 2 представлена примерная схема процессора 1 изображения. На фиг. 2 процессор 1 изображения включает в себя три камеры 8а, 8b и 8с с однострочным датчиком; панели 11а, 11b и 11с изображения с камер; лазерные маркеры 12а и 12b; лазерные возбудители 13а и 13b и основной компьютер 14.
Камеры 8а, 8b и 8с с однострочным датчиком разделяют шпон 9 в направлении, перпендикулярном направлению транспортировки, между тремя камерами и захватывают цветные изображения. Панели 11а, 11b и 11с получения изображения с камер каждый раз выполняют оцифровку однострочного изображения, загруженного из соответствующих камер с однострочным датчиком, и передают данные изображения на основной компьютер 14. Лазерные маркеры 12а и 12b излучают тонкие световые лучи в направлении транспортировки шпона, которые предназначены для использования в качестве меток при синтезе (соединении) соответствующих изображений из камер 8а, 8b и 8с с однострочным датчиком. Излучаемым световым лучом может быть тонкий световой луч разного цвета (например, монохроматический световой луч красного лазера) в зависимости от цвета шпона (пиломатериала), чтобы его можно было легко удалить в последующих процессах. Лазерные возбудители 13а и 13b подсоединены к источнику питания переменного тока и возбуждают лазерные маркеры 12а и 12b. Основной компьютер 14 включает в себя средство обработки, средство памяти, средство вывода и т.п. и выполняет обработку изображения (синтез изображения, поиск сучков, поиск дефектов и т.п.) шпона 9. В этом случае панели 11а, 11b и 11с получения изображения с камер и основной компьютер 14 образуют средство обработки изображения.
Функционирование процессора изображения включает в себя облучение транспортируемого шпона 9 светом от средства 5 облучения для проходящего света и средства 6 облучения для отраженного света. Каждый раз, когда из камер 8а, 8b и 8с с однострочным датчиком загружается однострочное изображение, панели 11а, 11b и 11с получения изображения с камер передают их данные на основной компьютер 14. Основной компьютер 14 осуществляет компенсацию полученных изображений и определяет величину коробления, а затем последовательно соединяет изображения. В итоге, когда заканчивается загрузка изображений на панелях 11а, 11b и 11с получения изображений, основной компьютер 14 практически заканчивает синтез цветного изображения и преобразование черно-белого полутонового изображения. Затем основной компьютер 14 соединяет изображения с панелей 11а, 11b и 11с получения изображения с камер, где изображение шпона разделено на три части.
В этот момент лазерные маркеры 12а и 12b излучают на шпон 9 лазерные метки для разделения шпона 9 на три части. Кроме того, благодаря выравниванию строчных изображений по соответствующим лазерным меткам на шпоне 9, осуществляемому камерами 8а, 8b и 8с с однострочным датчиком, изображение можно легко соединить. Вдобавок, чтобы увеличить скорость обработки изображения, поиск сучков можно осуществлять с использованием черно-белых полутоновых изображений, которые имеют большое количество пикселей, в то время как поиск засохших сучков и т.п. можно осуществлять, используя цветные изображения в уменьшенном масштабе (с уменьшенным количеством пикселей).
Далее в два этапа будет описано функционирование процессора изображения, а именно во время захвата изображения и последующей обработки.
<Описание обработки во время захвата изображения>
Данные изображения, захваченные камерами 8а, 8b и 8с, доставляются построчно на основной компьютер 14 и синтезируются в виде одного общего изображения.
Панели 11а, 11b и 11с получения изображения с камер загружают однострочное цветное изображение из камер 8а, 8b и 8с с однострочным датчиком, обнаруживают положение лазерной метки (положение соединения) и посылают однострочное цветное изображение вместе с информацией о положении лазерной метки на основной компьютер 14.
Основной компьютер 14 осуществляет компенсацию поступившего однострочного цветного изображения, одновременно определяет «величину коробления» и выполняет синтез на основе вышеупомянутой информации о положении (лазерная метка). В этот момент, если в контролируемом объекте имеется коробление, то появляется нелинейное искажение траектории в месте лазерной метки, в результате чего, оценив величину искажения, можно определить величину коробления.
На этапе, когда завершается захват изображения панелями 11а, 11b и 11с получения изображения с камер и получено последнее однострочное цветное изображение, основной компьютер 14 завершает синтез всего цветного изображения. Вдобавок для эффективного использования времени в ходе захвата изображения обработка, выполняемая для каждой отдельной строки, такая как черно-белое преобразование и уменьшение размеров, могут выполняться одновременно.
<Описание обработки во время анализа изображения после его захвата>
Панели 11а, 11b и 11с получения изображения с камер находятся в состоянии ожидания, пока не будет обнаружено поступление следующей доски (пиломатериала).
Основной компьютер 14 на основе предварительно установленной информации, такой как размер, тип или т.п. доски, являющейся объектом контроля, выполняет поиск сучков, обнаруживает дефекты с использованием проходящего света и т.п. в соответствии с оцениваемой зоной и значениями уставок и, в конце концов, выполняет сортировку, включающую определение величины коробления. Результаты сортировки отображаются на дисплее (не показан), а также выводятся на контроллер 2 сортировщика.
Хотя приведенное выше описание относится к случаю, когда в качестве панелей 11а, 11b и 11с получения изображения с камер используют компьютеры (персональные компьютеры), основной компьютер 14 и т.п. в процессоре изображения, количество используемых компьютеров может изменяться в зависимости от объема данных изображения, производительности компьютера или т.п. В альтернативном варианте обработка может выполняться одним компьютером.
Вдобавок, хотя здесь описан случай использования трех камер 8а, 8b и 8с с однострочным датчиком, в альтернативном варианте можно использовать один, два или четыре или более камер с однострочным датчиком в зависимости от размера и типа доски, являющейся объектом контроля, производительности компьютера или т.п.
(3) Описание обнаружения дефектного участка, образовавшегося вследствие изменения цвета поверхности шпона
Дефектные участки, образовавшиеся вследствие изменения цвета поверхности пиломатериала, которые влияют на качество пиломатериала, можно обнаружить, используя описанные ниже средства согласно описанному ниже способу.
Дефектный участок, образовавшийся вследствие изменения цвета, относится: к участку, цвет которого изменился под действием попавшего на пиломатериал извне грибка (или т.п.); или в случае шпона, используемого в клееной фанере или т.п., к ожогу, образовавшемуся в сушилке; к следу на коре пиломатериала; к смоле, находившейся внутри пиломатериала и просочившейся на его поверхность, и т.п.
Теперь такие участки можно диагностировать как дефектные участки.
(Описание средств обнаружения дефектного участка)
1) Камеры 8а, 8b и 8с с однострочным датчиком захватывают изображение поверхности пиломатериала, которое загружается в компьютер с использованием устройства ввода (средство ввода).
2) Захваченное изображение сохраняют в виде цветного изображения, в котором каждый пиксель составлен из комбинации RGB (красный, зеленый и синий) в памяти компьютера (средство хранения).
3) Компьютерная программа обработки изображения (процессор изображения) преобразует RGB-изображение в изображение типа HSV (тон, насыщенность и яркость).
4) Обнаруживают дефектный участок на основе HSV-изображения описанным ниже способом.
(Описание способа обнаружения дефектного участка)
Цвет поверхности нормального («здорового») пиломатериала в одинаковых образцах распределен в конкретной зоне насыщенности и тона независимо от того, темный ли это цвет или светлый. Однако дефектный участок, например пораженный грибком, имеет отклонение от распределения цвета на здоровом участке как по насыщенности, так и по тону вследствие различия их природы. Вдобавок цветовое распределение дефектного участка, например, с ожогом располагается в гораздо более темной области (с меньшей яркостью) по сравнению с цветовым распределением здорового участка.
Таким образом, данный способ отличается тем, что он выявляет отклонения насыщенности и тона, а также отклонение яркости цветового распределения поверхности контролируемого пиломатериала по сравнению с цветовым распределением поверхности здорового пиломатериала и выявляет участок со значительным отклонением в качестве дефектного участка.
(4) Описание способа получения цветового распределения поверхности здорового пиломатериала, подлежащего использованию в качестве эталонного
1) Цветная камера с однострочным датчиком захватывает изображение поверхности здорового пиломатериала для контрольных экземпляров.
2) На шаге 1) для обеспечения достаточной статистической точности для одних и тех же экземпляров берется множество (порядка 20 или более) изображений поверхности в различных условиях.
3) Каждый цвет пикселя во всех вышеописанных изображениях располагают в трехмерной цветовой позиции в компьютерной памяти для создания трехмерного цветового распределения.
Что касается трехмерного цветового пространства, то можно использовать цветовую позицию RGB (красный, зеленый и синий), цветовое пространство HSV (тон, насыщенность и яркость), пространство Lab (где «L» обозначает яркость, «а» обозначает элемент тона в диапазоне от зеленого до красного, а «b» обозначает элемент тона в диапазоне от синего до желтого) или т.п.
4) Для каждой плоскости с одинаковой яркостью в трехмерном цветовом распределении получают двухмерное распределение, чтобы определить точку, указывающую максимальную частоту.
5) Путем поэтапного изменения яркости можно получить кривую, приблизительно соединяющую точки максимальной частоты в 4). Эту кривую называют эталонной центральной осью трехмерного цветового распределения.
Например, когда значение яркости находится в диапазоне от 0,0 до 1,0 в цветовом распределении HSV, для каждого сегмента яркости величиной 0,02 получают двухмерное цветовое распределение тона и насыщенности пикселей, имеющих одинаковое значение яркости, и получают кривую, соединяющую точки максимальной частоты, которую устанавливают в качестве эталонной центральной оси трехмерного цветового распределения. Одновременно получают стандартное отклонение σc(v) двухмерного распределения тона и насыщенности.
6) Когда заранее известно, что площадь дефектного участка мала по отношению к площади объекта контроля, эталонное распределение можно заменить распределением изображения, полученным для каждого объекта контроля. Это возможно потому, что необходимо получить только среднее значение распределения для здорового участка и значение стандартного отклонения.
(5) Описание способа контроля дефектов
1) С помощью цветной камеры с однострочным датчиком захватывают изображение поверхности контролируемого пиломатериала.
2) Каждый пиксель изображения позиционируют в трехмерном цветовом пространстве для создания трехмерного цветового распределения.
3) Получают хроматическое отклонение от эталонной центральной оси трехмерного цветового распределения следующим образом.
Например, если пиксель в положении x,y в изображении объекта обозначить как d[x,y], то цвет в пространстве цветового распределения HSV выражается как
значение тона: h(g[x,y]),
значение насыщенности: s(g[x,y]),
значение яркости: v(g[x,y]),
координаты эталонной центральной оси при определенной яркости v на эталонной центральной оси трехмерного цветового распределения, полученного ранее, выражаются как
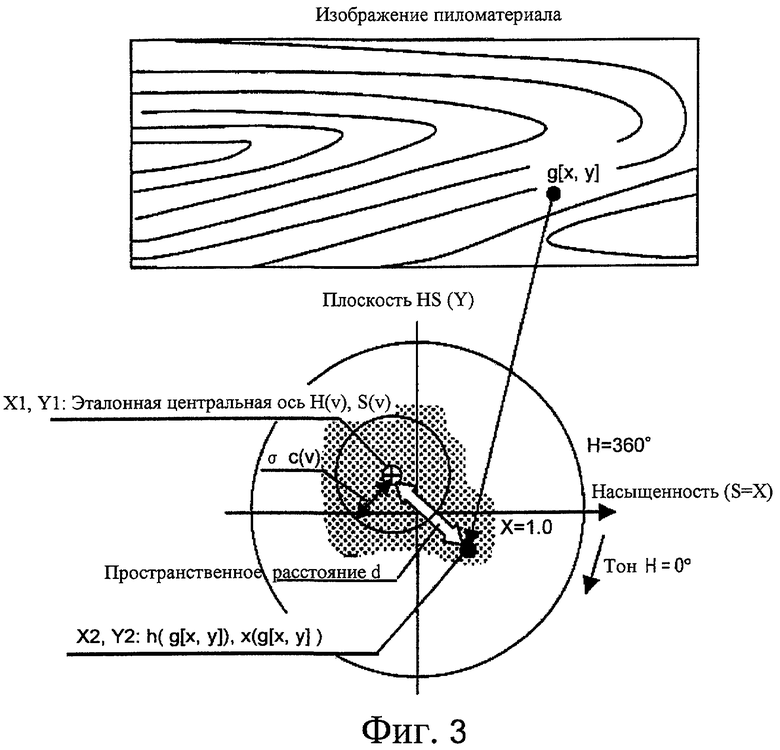
значение тона: H(v), значение насыщенности: S(v), и абсциссу и ординату плоскости с одинаковой яркостью обозначают как X и Y соответственно; после чего получаем диаграмму, фиг. 3. На фиг. 3 представлена примерная диаграмма, показывающая преобразование цветов соответствующих точек изображения g на плоскость HS. На фиг. 3 пиксель g[x,y] изображения объекта преобразуется в декартовы координаты X2, Y2 на плоскости HS. Хотя цветовое распределение (см. заштрихованный участок) может принимать формы, отличные от окружности, здесь получим примерную окружность со стандартным отклонением.
Декартовы координаты X1, Y1 координат H(v), S(v) эталонной центральной оси здесь можно представить как
X1=S(v)·cos(2π·H(v)/360),
Y1=S(v)sin(2πH(v)/360).
Декартовы координаты X2, Y2 пикселя g[x,y] можно представить в виде
X2=S(v)·cos(2π·h(v)/360),
Y2=S(v)·sin(2π·h(v)/360).
Квадрат пространственного расстояния от эталонной центральной оси можно получить в виде
d2=(X1·X2)2+(Y1·Y2)2.
Таким образом, величину хроматического отклонения Zc[x,y] можно выразить в виде
Zc[x,y]=(√d)/(σc(v)×βc),
где σc(v) обозначает стандартное отклонение двухмерного цветового распределения тона и насыщенности при яркости v по эталонной центральной оси, а βс обозначает коэффициент для определения того, насколько цвет должен отклониться от эталонной центральной оси, чтобы считать его аномальным, что оценивают по показателям σс(v), которые, например, принимают значение приблизительно от 1,0 до 2,0.
Вдобавок аналогичным образом можно получить отклонение пространственного расстояния с использованием других цветовых распределений, например цветового пространства Lab.
4) Далее, чтобы вычислить действительную площадь дефектного участка, необходимо отобрать только те цветовые пиксели, которые отклоняются от стандарта в пространстве цветового распределения, где исходный пиксель g[x,y] пиломатериала локально формирует кластер. При этом можно использовать способ, называемый релаксацией, представляющий собой общую технологию обработки изображения, для удаления отдельных изолированных точек и выделения участков со значительным отклонением с учетом цветов окружающих пикселей.
В качестве примера может быть определена дефектная зона вследствие аномальной цветности путем релаксации, при которой в качестве начальной метки используют величину хроматического отклонения Zc[x,y] от эталонной центральной оси (см. описание фиг. 4).
(Описание обнаружения дефектного участка по аномальной яркости)
(5) Получаем гистограмму в направлении эталонной центральной оси (ось яркости) для трехмерного цветового распределения.
(6) Если гистограмма яркости здорового участка, описанного выше, имеет нормальное распределение (гауссово распределение) со средним значением Vm и стандартным отклонением σv, то тогда значение Zv[x,y] отклонения яркости можно получить как
Zv[x,y]=|Vm-g[x,y].v|/(σv×βv),
где βv обозначает коэффициент для определения того, насколько цвет должен отклониться от среднего значения Vm яркости, чтобы его можно было считать аномальным, что оценивают по показателю σv, который принимает значение примерно от 1,0 до 4,0.
Общее значение Zt[x,y] отклонения цветности и яркости может быть выражено как
Zt[x,y]=Zc[x,y]+Zv[x,y].
Если гистограмма яркости не образует нормальное распределение из-за характеристик камеры или т.п. (например, когда на ярком участке, близком к яркости 1,0, появляется насыщение), точное вычисление среднего значения Vm и стандартного отклонения σv может не потребоваться. В таком случае, если предположить, что гистограмма подчиняется стандартному нормальному распределению, нормализованная функция F(x) кумулятивного распределения вероятности может быть выражена как
[Выражение 1]

где x обозначает яркость, µ обозначает среднее значение яркости, а σ обозначает стандартное отклонение.
Гистограммы яркости интегрируют, начиная с минимальной яркости, и получают яркости, которые обозначены как V1, V2, V3 и Vm, значение которых (кумулятивная частота), полученное делением интегрированного значения на общее количество пикселей, соответствует p1, p2, p3 и p4, показанным ниже.
p1=F(µ-2,0σ)=0,0228
p2=F(µ-1,0σ)=0,1587
p3=F(µ-0,5σ)=0,3085
p4=F(µ)=0,5
Вдобавок допустимые диапазоны Vmin и Vmax, достижимые с помощью V1, V2, V3 и Vm, можно получить эмпирическим путем исходя из пиломатериала или т.п., используемого в качестве эталона. Например, возможная уставка может представлять собой Vmin=0,25; Vmax=0,9.
а) Если позицию яркости, соответствующую V2:F(Vm-σ)=0,1587 и Vm:F(Vm)=0,5, находящуюся в допустимом диапазоне, можно найти среди V1, V2, V3 и Vm, то тогда оценочное среднее значение x=Vm, а стандартное отклонение σv можно получить на основе фиг. 8.
b) Однако в случае, когда профиль распределения нарушен на участке, где распределение яркости меньше, чем x=µ, то тогда Vm выпадает из допустимого диапазона области. В этом случае путем вычисления V1:F(Vm-2,0σv) и V2:F(Vm-1,0σv), находящихся в допустимом диапазоне, оценки σv и Vm можно получить как
σv=V2-V1
Vm=V2+σv
(см. фиг. 9).
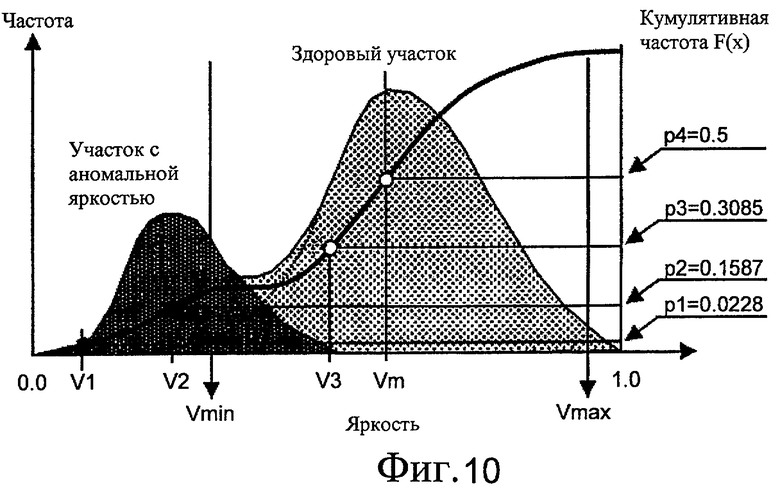
с) В альтернативном варианте, когда участок с аномальной яркостью становится относительно большим, V1:F(Vm-2,0σv) и V2:F(Vm-1,0σv) выпадают из допустимого диапазона. В этом случае исходя из значений яркости V3:F(Vm-0,5σ)=0,3085 и Vm:F(Vm)-0,5, находящихся в допустимом диапазоне, σv можно выразить как σv=(Vm-V3)×2, что позволяет оценить значения σv и Vm (см. фиг. 10).
Используя этот способ, можно получить среднее значение и стандартное отклонение для здорового участка без необходимости использования пиломатериала, служащего в качестве эталона, и независимо от профиля распределения. При использовании пиломатериала, служащего в качестве эталона, среднее значение и стандартное отклонение для него следует использовать без выполнения вычислений.
7) Далее для вычисления действительной площади дефектного участка необходимо выбрать только те цветовые пиксели, которые отклоняются от стандарта в пространстве цветового распределения, где исходный пиксель g[x,y] пиломатериала локально образует кластер. При этом для удаления отдельных изолированных точек и выделения участков со значительным отклонением можно использовать способ, называемый релаксацией, который относится к общей технологии обработки изображения, учитывающей цвета окружающих пикселей.
Например, дефектную зону вследствие аномальной цветности и яркости можно определить с помощью релаксации, в которой используется общее значение Zt[x,y] отклонения цветности и яркости в качестве начальной метки (см. описание фиг. 4).
Ранее при автоматическом контроле качества пиломатериала дефектные участки обнаруживали только по тому, насколько светел или темен цвет поверхности, или путем определения конкретного цвета. Однако указанные способы неспособны воспринимать изменения яркости и цвета участков, что приводит к оценке всех контролируемых объектов как бездефектных.
Участки, которые выглядят неприятно для человеческого глаза и которые влияют на качество материала, вероятно будут иметь цвета, которые неестественны для пиломатериала. Указанные цвета проявляются в виде отклонений в цветовом распределении в трехмерном цветовом пространстве. Теперь дефектные участки можно обнаружить с высокой точностью путем использования унифицированного способа, в котором указанные отличия выделяются и диагностируются.
Вдобавок, поскольку грибок и т.п., влияющие на качество пиломатериала, имеет разные цвета в зависимости от типа или области производства пиломатериала, трудно, используя один способ, обнаружить все указанные варианты грибков с высокой точностью. Однако согласно настоящему изобретению, если даже типы пиломатериала как объекты контроля отличаются, обнаружить дефект можно без сильного изменения эталонных значений координат центральной оси. Если даже точность обнаружения ухудшается в зависимости от того или иного экземпляра, точность обнаружения можно восстановить просто путем изменения координат эталонной центральной оси изначального трехмерного цветового распределения.
Кроме того, хотя смолу, кору и т.п. трудно обнаружить путем визуального контроля с использованием обработки изображения, теперь, имея вышеописанный способ, такие дефекты можно обнаружить.
Поскольку потемневшие участки коры и т.п. можно теперь обнаружить с высокой точностью, можно легко оценить, живой ли этот сучок или сухой, путем оценки того, осталась ли потемневшая кора или нет.
(6) Описание релаксации
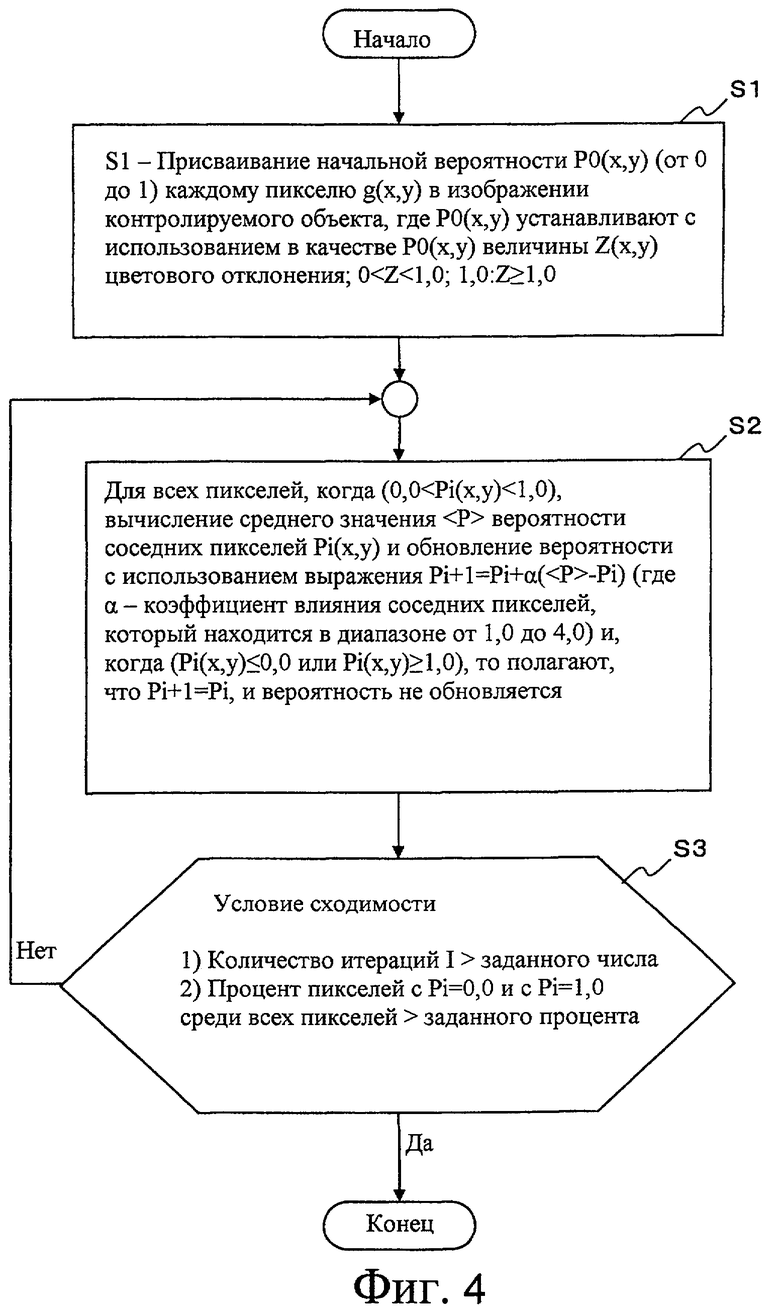
На фиг. 4 представлена примерная диаграмма релаксации. Далее описываются процессы с S1 по S3, показанные на фиг. 4.
В этих процессах для каждого пикселя g(x,y) в изображении, которое становится объектом контроля, устанавливают вероятность Pi(x,y), где Pi(x,y) - вероятность дефекта пикселя g(x,y) после i-й итерации.
S1: Процессор изображения присваивает каждому пикселю g(x,y) в изображении, которое становится объектом контроля, начальную вероятность P0(x,y) (от 0 до 1,0) и переходит к процессу S2. В процессе S1 вероятность P0(x,y) устанавливают следующим образом с использованием значения цветового отклонения Z(x,y).
P0(x,y)=Z(x,y):0<Z<1,0
1,0:Z≥1,0
S2: Для всех пикселей,
если (0,0<Pi(x,y)<1,0),
то тогда процессор изображения вычисляет среднее значение вероятности <P> соседних пикселей Pi(x,y), обновляет эту вероятность как Pi+1=Pi+α(<P>-Pi) (где α - коэффициент влияния соседних пикселей, которые находятся в диапазоне примерно от 1 до 4) и переходит к процессу S3.
Если (Pi(x,y)≤0,0 или Pi(x,y)≥1,0), то тогда процессор изображения полагает, что
Pi+1=Pi
и переходит к процессу S3 без обновления вероятности.
S3: Процессор изображения проверяет условие сходимости.
Если для Pi(x,y) количество итераций I больше заданного числа (I> заданное число) и процент пикселей с Pi=0,0 и Pi=1,0 среди всех пикселей больше заданного процента (> заданный процент), то тогда этот процесс завершается.
Если нет, то процесс S2 повторяется.
В этом случае устанавливают заданное количество итераций около 10, а заданный процент пикселей с Pi=0,0 и Pi=1,0 среди всех пикселей устанавливают около 99%.
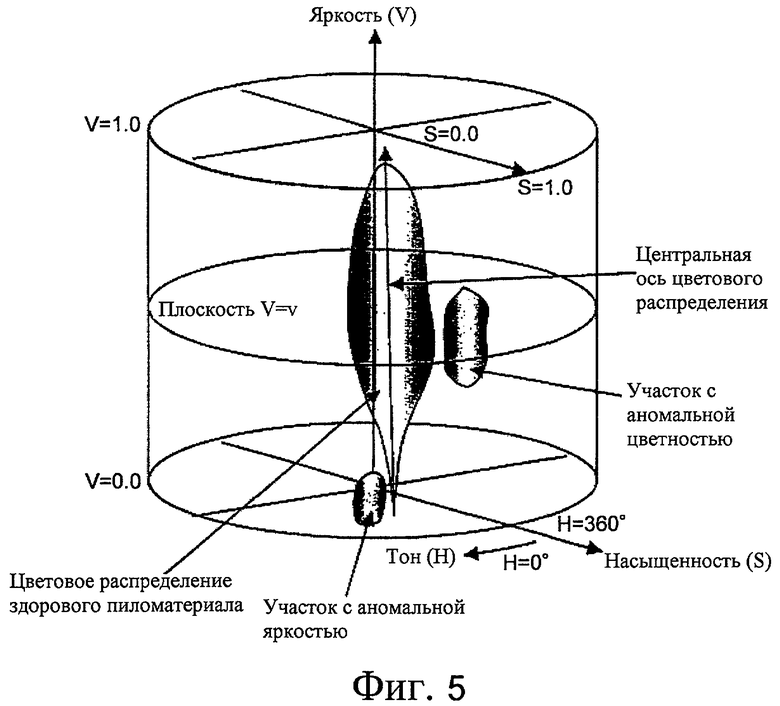
(7) Описание цветового распределения в цветовом пространстве HSV
На фиг. 5 показана примерная диаграмма цветового распределения в цветовом пространстве HSV. На фиг. 5 в направлении по вертикали представлена яркость (V: в данном случае V = от 0,0 до 1,0), в направлении диаметра на той же плоскости яркости представлена насыщенность (S: в данном случае S = от 0,0 до 1,0), а в направлении по окружности на той же плоскости яркости представлен тон (H: в данном случае H = от 0º до 360º). Цветовое распределение для здорового пиломатериала включает в себя значительные верхнюю и нижнюю области цветового распределения. Центральная ось (эталонная центральная ось) показана стрелкой, направленной вверх.
Вдобавок цветовое распределение на участке с аномальной цветностью, который представляет собой обесцвеченную часть, например грибок, показана с правой стороны в виде области аномальной цветности. Кроме того, в нижней части в виде небольшой области цветового распределения показан участок с аномальной яркостью, например ожог, вызванный обработкой в сушилке или т.п.
(8) Описание пиксельного распределения в конкретной плоскости яркости
На фиг. 6 представлена пояснительная диаграмма пиксельного распределения в конкретной плоскости v яркости. На фиг. 6 показано пиксельное распределение для участка с аномальной цветностью в конкретной плоскости v яркости. В этом случае пиксельное распределение для участка с аномальной цветностью занимает конкретную область (см. заштрихованный участок) со стандартным отклонением σс(v).
(9) Описание пиксельного распределения в направлении центральной оси
На фиг. 7 представлена примерная диаграмма кумулятивной частоты F(x) нормального распределения. На фиг. 7 общее нормальное распределение (вероятность распределения) показано пунктирной линией, а кумулятивная частота (кумулятивная функция распределения вероятности) F(x) нормализована путем деления интегрального значения для здорового участка пиломатериала на общее количество пикселей N. В этом случае p1=0,0228(µ-2σ), p2=0,1587(µ-1,0σ), p3=0,3085(µ-0,5σ) и p4=0,5(среднее значение = µ).
На фиг. 8 представлена пояснительная диаграмма пиксельного распределения (профиль нормального распределения) в направлении центральной оси. На фиг. 8 показана гистограмма в направлении эталонной центральной оси (ось яркости) трехмерного цветового распределения. На гистограмме яркости значения яркостей, соответствующие p1, p2, p3 и p4, описанным выше, равны V1, V2, V3 и Vm соответственно, а допустимыми границами диапазона, достижимого на здоровом участке поверхности пиломатериала, будут Vmin и Vmax. В данном случае, если может быть найдена позиция яркости, соответствующая V2:F(Vm-σ)=0,1587 и Vm:F(Vm)=0,5, находящиеся в допустимом диапазоне, то тогда оценка среднего значения составит x=Vm и можно получить стандартное отклонение σv.
На фиг. 9 показана поясняющая диаграмма для оценки среднего значения Vm в случае аномального профиля распределения. На фиг. 9 показана гистограмма в направлении эталонной центральной оси трехмерного цветового распределения. При такой гистограмме яркости в случае, когда профиль распределения нарушается на участке, где распределение яркости здорового участка поверхности пиломатериала меньше, чем x=µ, то тогда Vm выпадает из допустимого диапазона. В этом случае σv и Vm можно оценить, вычислив V1:F(Vm-2,0σv) и V2:F(Vm-1,0σv), причем σv=V2-V1, а Vm=V2+σv.
На фиг. 10 представлена примерная диаграмма для случая, когда участок с аномальной яркостью занимает большую площадь. На фиг. 10 показана гистограмма в направлении эталонной центральной оси (ось яркости) трехмерного цветового распределения. При такой гистограмме яркости в случае, когда площадь участка с аномальной яркостью на поверхности пиломатериала оказывается относительно большой, то тогда V1:F(Vm-2,0σv) и V2:F(Vm-1,0σv) выпадают из допустимого диапазона. В этом случае исходя из значений яркости V3:F(Vm-0,5σ)=0,3085 и Vm:F(Vm)=0,5, находящихся в допустимом диапазоне, величину σv можно выразить как
σv=(Vm-V3)×2, что позволяет оценить σv и Vm.
Как здесь показано, когда гистограмма яркости не имеет форму нормального распределения из-за характеристик камеры или т.п. (например, когда характеристики чувствительности датчиков являются нелинейными на участке, близком к яркости, равной 1,0), не обязательно получать точное среднее значение Vm и стандартное отклонение σv. Однако даже в указанном случае, если предположить, что гистограмма соответствует стандартному нормальному распределению, общее распределение можно оценить из гистограммы на спаде распределения (две точки), можно получить среднее значение Vm и стандартное отклонение σv.
Соответственно, среднее значение Vm и стандартное отклонение σv для здорового участка можно получить (оценить) с помощью процессора изображения с использованием двух точек из числа точек от V1 до Vm, находящихся в допустимом диапазоне (от Vmin до Vmax). В порядке очередности указанных двух используемых точек сначала должны быть использованы среднее значение Vm и другая точка (одна точка из числа точек с V1 по V3), и следует использовать две точки из точек с V1 по V3, если среднее значение Vm не находится в допустимом диапазоне.
(10) Описание установки программы
Процессор 1 изображения (средство обработки изображения), контроллер 2 сортировщика (средство управления сортировщиком), панели 11а, 11b и 11с получения изображения с камеры, основной компьютер 14 и т.п. могут быть сконфигурированы в виде программы, выполняемой центральным процессором (CPU), и запоминаться в основном хранилище. Эта программа должна обрабатываться компьютером. Компьютер выполнен из аппаратных средств, таких как основной управляющий блок, основная память, файловое устройство, устройство вывода, например дисплей, и устройство ввода.
Программа согласно настоящему изобретению устанавливается на упомянутый компьютер. Установка выполняется путем предварительного запоминания программы на портативном носителе записи, таком как гибкий диск, магнитооптический диск и т.п., и установки носителя записи на файловое устройство, включенное в компьютер, либо через дисковод, предусмотренный на компьютере для обеспечения возможности доступа к носителю записи, либо через сеть, например локальную сеть (LAN). Соответственно, можно без труда обеспечить устройство контроля пиломатериалов, способное с использованием цветового распределения точно обнаруживать дефектные участки вследствие изменения цвета поверхности пиломатериала, которые влияют на качество пиломатериала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ СУЧКА В ДРЕВЕСИНЕ | 2006 |
|
RU2381442C2 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2433438C2 |
| Способ обработки изображений магнитно-резонансной томографии для формирования обучающих данных | 2023 |
|
RU2813480C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ СИГНАЛА ИЗОБРАЖЕНИЯ И ПРОГРАММА | 2007 |
|
RU2415481C1 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЙ С HDR НА ОСНОВАНИИ ОБЛАСТЕЙ ЯРКОСТИ | 2013 |
|
RU2643663C2 |
| АВТОМАТИЧЕСКАЯ ОБРАБОТКА БАЛАНСА БЕЛОГО С ГИБКИМ ВЫБОРОМ ЦВЕТОВОГО ПРОСТРАНСТВА | 2011 |
|
RU2537038C2 |
| СПОСОБ МИКРОСКОПИЧЕСКОГО ИССЛЕДОВАНИЯ ОБРАЗЦА, СОДЕРЖАЩЕГО МИКРООБЪЕКТЫ С РАЗНОРОДНЫМИ ЗОНАМИ | 2006 |
|
RU2308745C1 |
| УПРАВЛЕНИЕ АВТОФОКУСИРОВКОЙ С ИСПОЛЬЗОВАНИЕМ СТАТИСТИЧЕСКИХ ДАННЫХ ИЗОБРАЖЕНИЯ НА ОСНОВАНИИ ПОКАЗАТЕЛЕЙ ГРУБОЙ И ТОЧНОЙ АВТОФОКУСИРОВКИ | 2011 |
|
RU2543974C2 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЦИФРОВОГО ФОТОИЗОБРАЖЕНИЯ | 2006 |
|
RU2400815C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕОБРАЗОВАНИЯ СТЕРЕОКОНТЕНТА | 2009 |
|
RU2423018C2 |
Изобретение относится к приборостроению. Средство (8) формирования изображения захватывает цветное изображение пиломатериала (9). Средство (1) обработки изображения получает цветовое распределение цветного изображения, захваченного средством (8) формирования изображения, сравнивает гистограммы яркости полученного цветового распределения с заранее определенной гистограммой яркости цветового распределения нормального пиломатериала. Оценивает полученное цветовое распределение как аномальное, когда оно отклоняется от цветового распределения нормального пиломатериала на заранее определенную величину или более, и обнаруживает дефект пиломатериала, имеющего аномальное цветовое распределение, отклоняющееся на величину, превышающую заранее определенное значение. 3 н. и 4 з.п. ф-лы, 10 ил.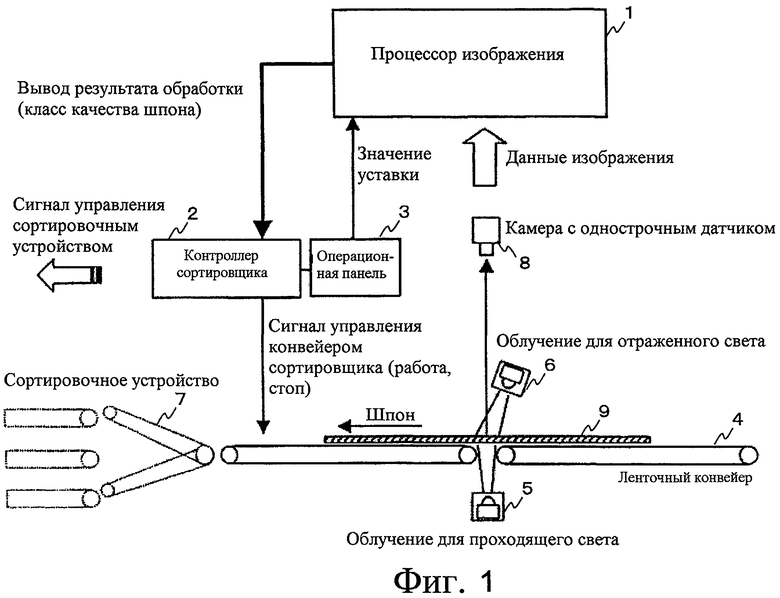
1. Способ контроля пиломатериала, отличающийся тем, что способ содержит этапы, на которых:
используют средство формирования изображения для захвата цветного изображения пиломатериала; и
используют средство обработки изображения для получения цветового распределения цветного изображения, захваченного средством формирования изображения, сравнения гистограммы яркости полученного цветового распределения с заранее определенной гистограммой яркости цветового распределения нормального пиломатериала, оценки полученного цветового распределения как аномального, когда гистограмма яркости полученного цветового распределения отклоняется от заранее определенной гистограммы на заранее определенную величину или более, и обнаружения зоны на поверхности пиломатериала, захваченной средством формирования изображения, чье аномальное цветовое распределение имеет значение, превышающее заранее определенное значение, в качестве дефекта пиломатериала.
2. Способ контроля пиломатериала по п.1, отличающийся тем, что цветовые распределения, полученные от цветного изображения нормального пиломатериала, используются от случая к случаю в качестве заранее определенных цветовых распределений нормального пиломатериала.
3. Способ контроля пиломатериала по п.1 или 2, отличающийся тем, что для гистограммы яркости цветового распределения нормального пиломатериала, определенного заранее, полное нормальное распределение оценивают исходя из кумулятивной частоты частичной области в предположении, что полное распределение следует нормальному распределению.
4. Устройство для контроля пиломатериала, отличающееся тем, что устройство содержит:
средство формирования изображения для захвата цветного изображения пиломатериала; и
средство обработки изображения для получения цветового распределения цветного изображения, захваченного средством формирования изображения, сравнения гистограммы яркости полученного цветового распределения с заранее определенной гистограммой яркости цветового распределения нормального пиломатериала, оценки полученного цветового распределения как аномального, когда гистограмма яркости полученного цветового распределения отклоняется от заранее определенной гистограммы яркости на заранее определенную величину или более, и обнаружения зоны на поверхности пиломатериала, захваченного средством формирования изображения, чье аномальное цветовое распределение имеет значение, превышающее заранее определенное значение, в качестве дефекта пиломатериала.
5. Устройство контроля пиломатериала по п.4, отличающееся тем, что при установке в качестве объекта контроля пиломатериала, чья дефектная зона мала по отношению к площади объекта контроля, средство обработки изображения использует цветовые распределения, полученные от цветного изображения нормальной части пиломатериала, в качестве заранее определенных цветовых распределений нормального пиломатериала.
6. Устройство контроля пиломатериала по п.4, отличающееся тем, что для гистограммы яркости средство обработки изображения оценивает полное нормальное распределение исходя из кумулятивной частоты частичной области в предположении, что полное распределение соответствует нормальному распределению.
7. Машиночитаемый запоминающий носитель, имеющий программу, сохраненную на нем, которая, когда выполняется на компьютере, предписывает ему осуществлять способ, содержащий этапы, на которых:
используют средство формирования изображения для захвата цветного изображения пиломатериала; и
используют средство обработки изображения для получения цветового распределения цветного изображения, захваченного средством формирования изображения, сравнения гистограммы яркости полученного цветового распределения с заранее определенной гистограммой яркости цветового распределения нормального пиломатериала, оценки полученного цветового распределения как аномального, когда гистограмма яркости полученного цветового распределения отклоняется от заранее заданной гистограммы яркости на заранее определенную величину или более, и обнаружения зоны на поверхности пиломатериала, захваченной средством формирования изображения, чье аномальное цветовое распределение имеет значение, превышающее заранее определенное значение, в качестве дефекта пиломатериала.
| JP 8145914 A, 07.06.1996 | |||
| JP 2006322774 A, 30.11.2006 | |||
| US 4221974 A, 09.09.1980 | |||
| US 5644392 A, 01.07.1997 | |||
| СПОСОБ ПРОИЗВОДСТВА МОРОЖЕНОГО "АНТАРКТИДА" (ВАРИАНТЫ) | 2014 |
|
RU2547304C1 |
| Способ определения дефектов в пиленых древесных материалах | 1991 |
|
SU1794246A3 |

