Область техники
Изобретение относится к инженерным изысканиям в строительстве и может быть применено для определения деформационных и прочностных характеристик грунтов в полевых условиях.
Область техники
Аналогом данного предлагаемого изобретения является установка для испытания грунта статической нагрузкой (авторское свидетельство на изобретение SU 367363 А1, заявка 1633584 от 09.03.1971, МПК G01N 3/42, опубликовано 23.01.1973, бюл. №8), включающая нагрузочную гидросистему с измерительными приспособлениями, полую анкерную сваю и нагрузочную штангу с винтовым штампом, отличающаяся тем, что с целью повышения точности измерений при испытании грунта нагрузочная штанга смонтирована в полости анкерной сваи с возможностью перемещения вдоль ее оси.
Недостатком известного решения является то, что при создании статической нагрузки нагрузочная штанга изгибается внутри полой анкерной сваи, что приводит к погрешности в измерении осадки штампа.
Следующим аналогом заявляемого технического решения является УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ГРУНТА (авторское свидетельство на изобретение SU 379875 А1, заявка 1639084 от 28.03.1971, МПК G01N 33/24, G01B 19/16, B30B 15/02, опубликовано 20.04.1973, бюл. №20), включающая гидравлическую нагрузочную систему и штамп, взаимодействующий со штоком приспособления для регистрации осадка штампа, отличающаяся тем, что с целью воспроизведения величины осадки штампа, приспособление для регистрации осадки штампа выполнено в виде укрепленного на реперном устройстве датчика перемещения, связанного с импульсным генератором, соединенным со счетчиком импульсов и реверсивными шаговыми механизмами, один из которых связан с контактом датчика, шарнирно соединенным со штоком, а другой - с записывающим устройством.
Недостатком известного решения является то, что при создании статической нагрузки нагрузочная штанга изгибается, что приводит к погрешности в измерении осадки штампа.
Наиболее близким аналогом (прототипом) заявляемого изобретения в части способа по технической сущности и общему количеству существенных признаков является способ испытания грунтов винтовым штампом, реализованный в УСТРОЙСТВЕ ДЛЯ ИСПЫТАНИЯ ГРУНТА (авторское свидетельство на изобретение SU 1381245 А1, заявка 4076346 от 06.06.1986, МПК E02D 1/00, опубликовано 15.03.1988, бюл. №10), включающее лопастной штамп, полую штангу с лопастным анкером, нагрузочное приспособление в виде силового гидроцилиндра, измерительного приспособления в виде датчиков линейных перемещений, и механизм нагружения, отличающийся тем, что с целью расширения диапазона исследуемых грунтов и повышения надежности измерений лопастной анкер установлен с возможностью свободного перемещения вдоль штанги, лопастной штамп выполнен полым, а силовой гидроцилиндр размещен в полости лопастного штампа и контактирует с торцом лопастного анкера, при этом датчики линейных перемещений размещены внутри полости между лопастным штампом и штангой.
Способ заключается в том, что в массив грунта с помощью бурового станка погружают путем завинчивания с приложением осевой нагрузки полые колонны труб, оснащенные на нижнем конце винтовой лопастью-штампом и винтовым анкером, с возможностью их ограниченного осевого перемещения как относительно друг друга, так и относительно колонны труб, а после погружения штампа на глубину испытания грунта верхний конец колонны труб жестко крепят к анкерному приспособлению и проводят испытания грунта путем приложения к штампу нагрузок заданными ступенями нагружения с измерением осадки штампа на каждой ступени через заданные интервалы времени до наступления условной стабилизации осадки, а по завершению одной ступени нагружения переходят на следующую ступень нагружения, причем нагрузочное приспособление в виде силового гидроцилиндра размещают в полости колонны труб в контакте со штампом и одновременно с анкером, а величину осадки штампа определяют по разности перемещений штампа относительно анкера и анкера относительно колонны труб с помощью датчиков линейных перемещений, соединенных, как и нагрузочное приспособление, каналом обратной связи с дневной поверхностью.
Недостаток прототипа заключается в низкой точности измерения осадки штампа на значительной глубине испытаний из-за не учета продольного изгиба штанги, что неизбежно при значительной глубине испытаний и значительной нагрузке. Другим недостатком является использование проводных каналов связи для передачи на поверхность грунта сигналов с датчиков перемещений, что усложняет и снижает производительность испытаний, так как приходится пропускать перед началом испытаний кабель через набор штанг. Кроме того, данное устройство применимо только для определения деформационных характеристик грунтов и неприменимо для определения прочностных характеристик грунтов, что ограничивает его возможности.
Сущность технического решения
Технической задачей изобретения является повышение точности измерений осадки винтового штампа, а также расширение функциональных возможностей и повышение производительности испытаний грунтов в полевых условиях.
Поставленная техническая задача в части способа решена тем, что согласно изобретению полая штанга выполнена из отдельных сегментов, внутри каждого введен сенсорный узел, включающий датчик наклона с цифровым выходом и приемопередатчик, подключенные по беспроводной связи к компьютеру находящийся на поверхности грунта, нагрузочное приспособление выполнено в виде двух сервоприводов, один из которых закреплен на консоли бурового станка, а второй находится внутри хвостовика винтового штампа и закреплен одной стороной на фланце, а на второй стороне имеет разъемное соединение для присоединения зонда или пробоотборника, зонд оснащен датчиком сил трения, датчиком лобового сопротивления, датчиком порового давления и подключены к сенсорному узлу, имеющий трехкоординатный акселерометр с цифровым выходом и приемопередатчик, подключенный по беспроводной связи к другим сенсорным узлам внутри полой штанги, а через них к удаленному компьютеру на поверхности грунта, а испытание грунта проводят ступенями или непрерывно с заданной скоростью вертикального перемещения, измеряя осадку штампа от заданной ступени давления или давление с заданной скоростью вертикального перемещения винтового штампа, причем расчетное значение осадки штампа определяется с учетом изгиба полой штанги, используя следующее выражение:
s=sштампа-sштанги,
где s - расчетное значение осадки штампа; sштампа - измеренное значение осадки штампа датчиком линейных перемещений с поверхности грунта; sштанги - ошибка измерения осадки штампа за счет продольного изгиба полой штанги, которая определяется с использованием следующей процедуры.
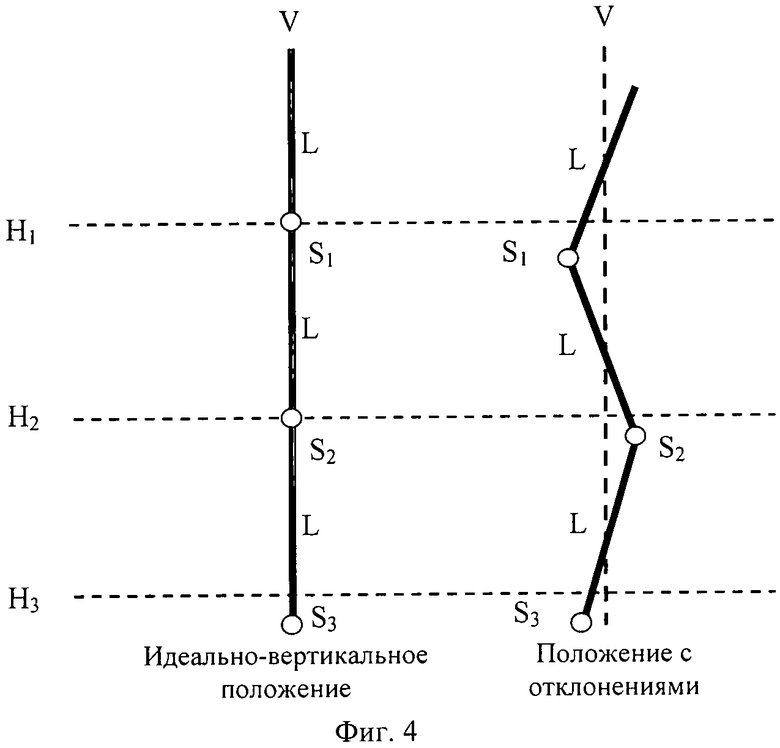
На фиг.4 изображена буровая штанга их трех сегментов полых штанг (К=3). Первый сегмент полой штанги находится сверху. Датчики наклона обозначены как S1, …, Sk. Длина одного сегмента полой штанги, равна L. Вертикальная ось обозначается как V. Горизонтальные плоскости обозначены H1, … Hk. Измеряются углы наклона (фиг.4) относительно оси V в плоскостях VON (угол α) и VOE (угол β).
Для расчета вертикального перемещения (ΔLH) каждого сегмента полой штанги при их отклонении от вертикальной оси относительно горизонтальной плоскости (H) необходимы следующие исходные данные (фиг.4, 5):
- α1, …, αk - измеренный угол наклона сегмента полой штанги в плоскости VON;
- β1, …, βk - измеренный угол наклона сегмента полой штанги в плоскости VOE;
- L - длина одного сегмента полой штанги;
- k - количество сегментов полой штанги.
Lvi - длина проекции i-го сегмента полой штанги на вертикальную ось V вычисляется по формуле:
Lvi=Lcosαicosβi.
Вертикальное перемещение каждого сегмента полой штанги при их отклонении от вертикали вычисляется по формуле:
ΔLHi=Li-Lvi.
Вертикальное перемещение всей полой штанги за счет изгиба вычисляется как сумма вертикальных перемещений отдельных сегментов полых штанг по формуле:
Следующей отличительной особенностью предлагаемого изобретения является введение в конструкцию винтового штампа двух взаимозаменяемых элементов в виде зонда и тонкостенного цилиндрического пробоотборника. Это позволяет, в одной точке массива грунта на любой глубине, провести одновременно не только испытания винтовым штампом, но и испытания зондом или отобрать монолит грунта. В настоящее время для этой цели используются раздельно винтовой штамп и устройство статического зондирования, которые имеют собственные системы нагружения и измерения, что более трудоемко и существенно дороже, так как используются различные технологии.
Испытания винтовым штампом и зондом в одной точке массива грунта позволяют определять одновременно прочностные (зонд) и деформационные (винтовой штамп) характеристики грунта, что расширяет функциональные возможности известного изобретения и снижает стоимость испытаний.
Еще одним из преимуществ предлагаемого изобретения является то, что устройство позволяет также отбирать монолиты грунта. Отбор монолита грунта в точке испытаний винтовым штампом позволяет провести затем лабораторные испытания, например испытания в условиях трехосного сжатия (ГОСТ 12248-96). В результате можно получить два значения модуля деформации из испытаний полевым и лабораторными методами, что позволяет найти корреляционные связи между различными опытными значениями модуля деформации и более точно назначать расчетное значение модуля деформации, используемое при проектировании оснований и фундаментов зданий и сооружений.
Наличие беспроводной системы передачи данных с датчиков в компьютер, а также использование беспроводной связи для управления процессом силового нагружения улучшает технические характеристики известного изобретения. Отпадает необходимость выполнения операции по пропуску кабеля через набор полых штанг и далее к измерительной системе. Это не только улучшает условия работы, но и сокращает время на подготовку испытаний, что в совокупности повышает производительность полевых испытаний грунтов.
Введение акселерометра в конструкцию винтового штампа также расширяет функциональные возможности предлагаемого изобретения. Предлагаемый способ позволяет определить не только модуль деформации, применяемый при проектировании фундаментов зданий и сооружений, но и упругий модуль деформации, который используется при проектировании сооружений с учетом сейсмического или динамического воздействия.
Перечень фигур, чертежей и иных материалов
На фиг.1 показан буровой станок с комплектом оборудования для реализации предлагаемого способа и устройство, общий вид.
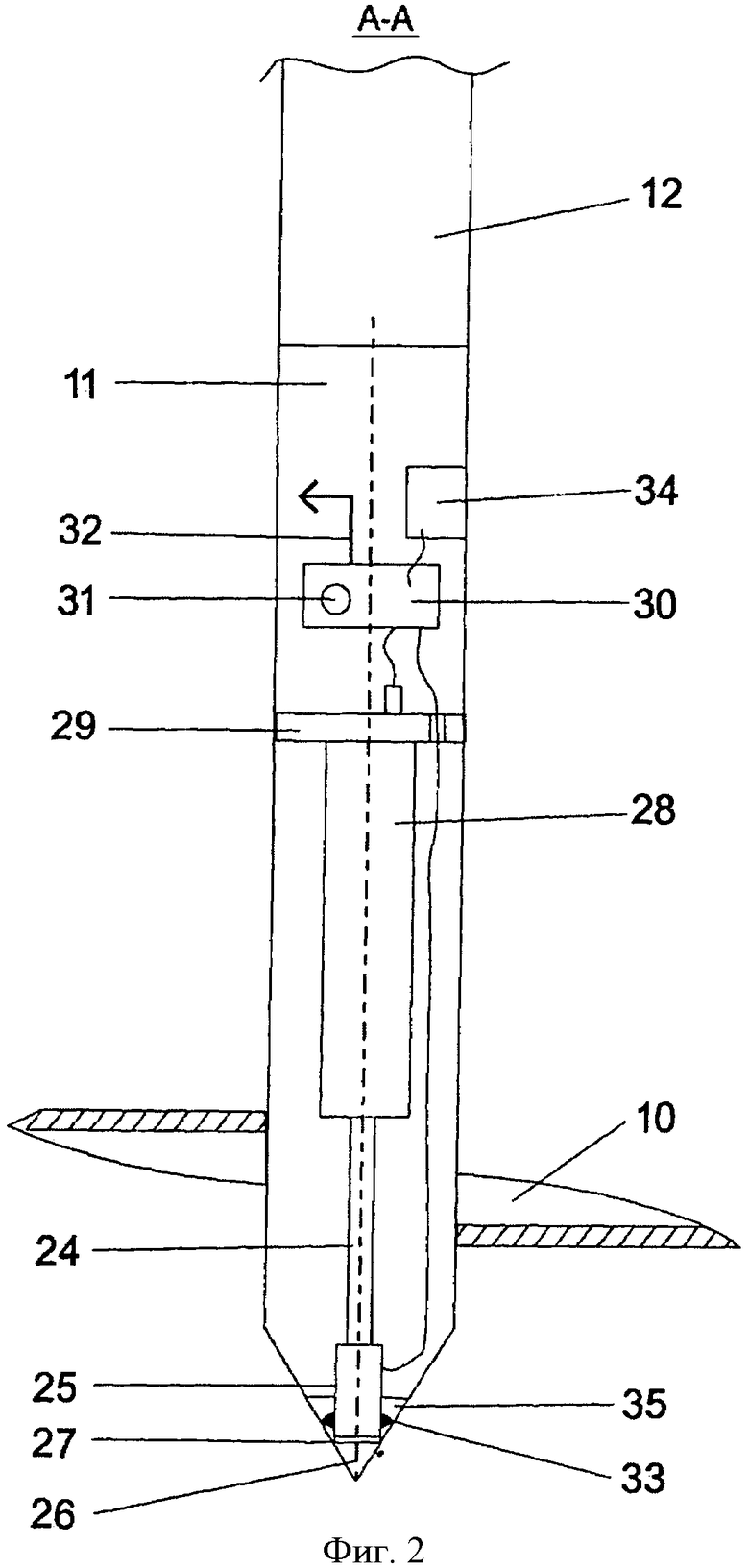
На фиг.2 показана конструкция нижней части винтового штампа с зондом.
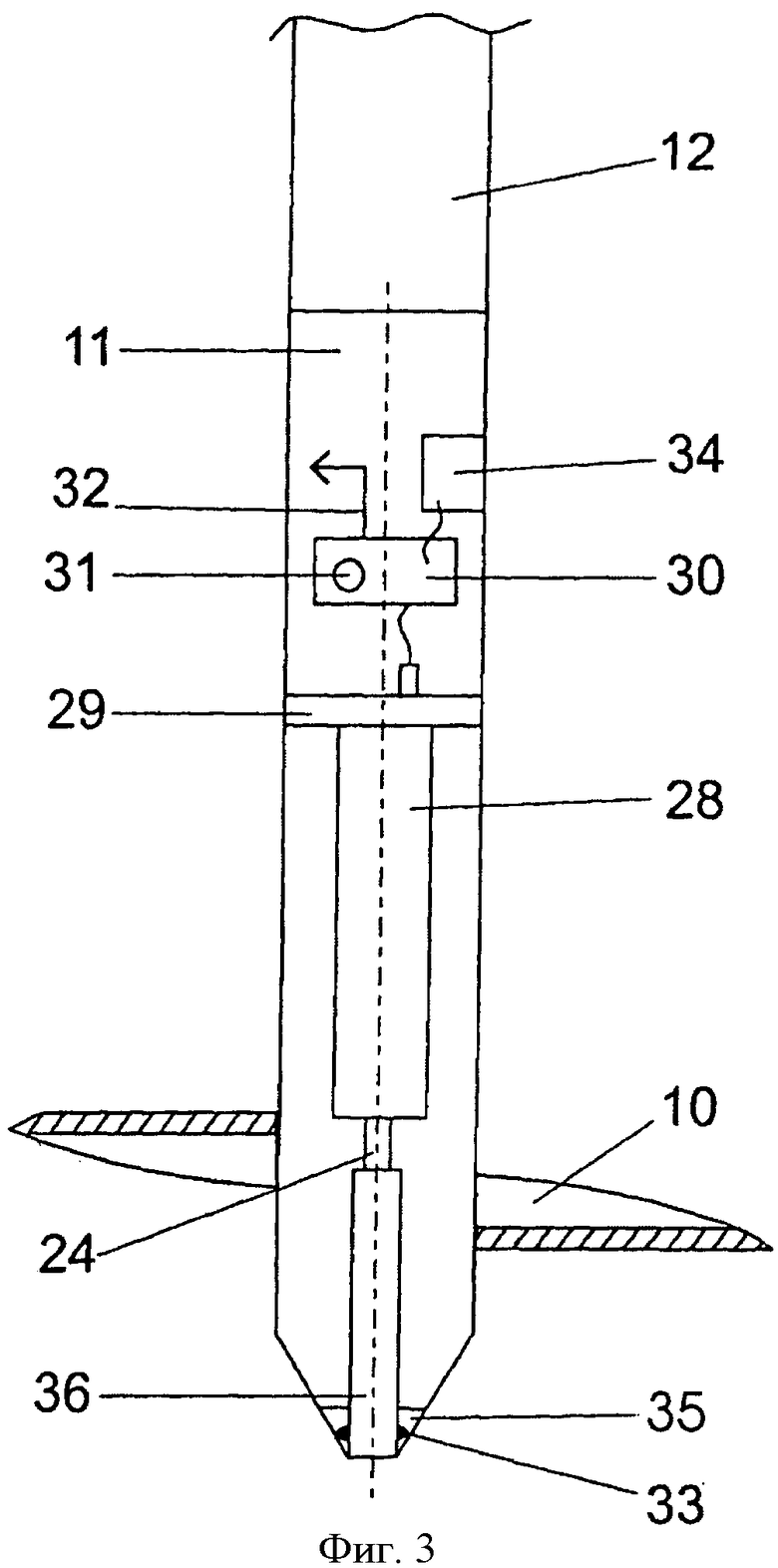
На фиг.3 показана конструкция нижней части винтового штампа с пробоотборником.
На фиг.4 показана расчетная схема для определения осадки винтового штампа за счет продольного изгиба полой штанги.
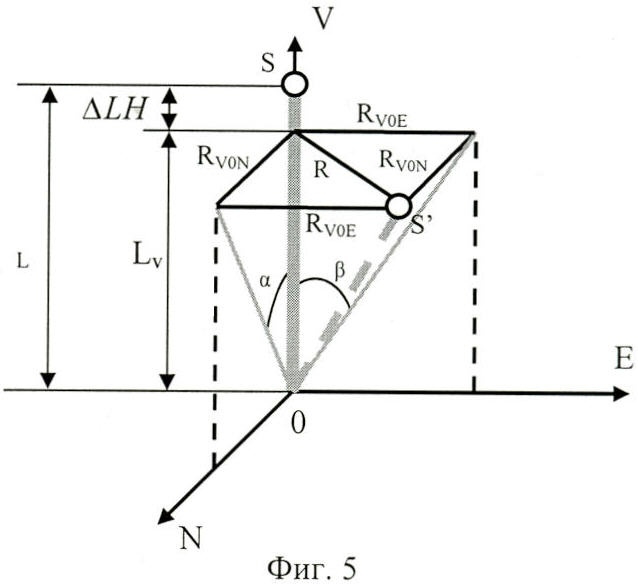
На фиг.5 показана схема вертикального смещения i-го сегмента полой штанги относительно горизонтальной плоскости.
Пример реализации технического решения
На фиг.1 показан буровой станок 1, выставленный на триггеры 2 и закрепленный винтовыми анкерами 3, оснащенный поворотной мачтой 4 с подвижным вдоль мачты с помощью гидроцилиндров станка вращателем 5 с выходным валом 6, который упирается в консоль 7, вдвигаемую в гнездо 8, закрепленное на шасси бурового станка. К нижней части консоли вертикально закреплен сервопривод 9, соединенный по беспроводной связи с помощью блока сбора данных 20 через интерфейс 21 с удаленным компьютером 22. Винтовой штамп 10 хвостовиком 11 прикреплен к нижнему сегменту полой штанги 12. Внутри каждого сегмента полой штанги установлены сенсорные узлы, включающие двухкоординатные датчики наклона 13, которые по беспроводной связи передают сигналы с датчиков в цифровом виде на приемопередатчик 14, размещенный внутри верхнего сегмента полой штанги и подключенный по беспроводной связи на частоте 2,5 ГГц к блоку сбора данных 20. На верхнем сегменте полой штанги установлена опорная головка 15, на которой закреплены четыре консоли 16. Реперная система состоит из четырех стоек 17 с подвижными кронштейнами, на которых закреплены держателями цифровые датчики линейных перемещений 18. На головке 15 установлен цифровой датчик силы 19. Датчик силы 19 и четыре датчика линейных перемещений 18 подключены по беспроводной связи к блоку сбора данных 20, который через интерфейс 21 подключен к компьютеру 22. Для центровки полой штанги используется стальной фартук 23, устанавливаемый на устье скважины.
На фиг.2 дополнительно показано сечение винтового штампа с хвостовиком, внутри хвостовика размещен цилиндрический зонд, включающий датчик 25 для измерения сил трения, датчик лобового сопротивления 26 в виде конуса при вершине в 60°, датчик порового давления 27. Зонд присоединен к штоку 24 сервопривода 28, а сам сервопривод закреплен на фланце 29. Выход датчика сил трения 25, датчика лобового сопротивления 26, датчика порового давления 27, канала управления шаговым двигателем подключены к блоку сбора данных и управления 30, включающий трехкоординатный акселерометр 31, усилитель сигналов, аналого-цифровой и цифро-аналоговый преобразователи, радиоприемник и радиопередатчик с антенной 32. В нижней конической части винтового штампа 10 имеется конический фланец 35 с сальником 33, причем внутренний диаметр сальника соответствует внешнему диаметру зонда.
Источником питания для блока управления и шагового двигателя является литиевые аккумуляторы 34.
На фиг.3 дополнительно показано сечение винтового штампа с хвостовиком, в нижней части винтового штампа размещен тонкостенный пробоотборник 36, прикрепленный штоком 24 к сервоприводу 28.
Осевая нагрузка на винтовой штамп создается при помощи сервопривода 9. Осевая нагрузка на зонд или пробоотборник создается при помощи второго сервопривода 28.
На фиг.4 обозначены:
H1, H2, Н3 - горизонтальные плоскости; L - длина одного сегмента полой штанги; S1, S2, S3 - датчики наклона.
На фиг.5 обозначены:
S - исходное положение датчика наклона; S' - положение датчика наклона после смещения; α - измеренный угол наклона сегмента полой штанги в плоскости VON; β - измеренный угол наклона сегмента полой штанги в плоскости VOE; L - длина сегмента полой штанги; Lv - проекция сегмента полой штанги на ось V; R - расстояние от датчика наклона S' до оси V; RVOE - проекция вектора R на плоскость VOE; RVON - проекция вектора R на плоскость VON.
На изображенном на фиг.1-3 устройстве, реализующем предлагаемый способ, работы по подготовке и испытанию грунтов, осуществляют следующим образом.
1. Устанавливают буровой станок 1 на заданной точке испытаний, используя инклинометр, подключенный к компьютеру, и триггеры, поднимают и выравнивают положение станка строго горизонтально. При нагрузках более веса бурового станка по направлению триггеров завинчивают в грунт вертикально или наклонно винтовые анкера 3.
2. При помощи бурового станка 1 проходят скважину на заданную глубину, в зависимости от вида грунта с обсадной или без обсадной трубы. Внутренний диаметр обсадной трубы или скважины принимается равным диаметру винтового штампа.
3. К полой штанге 12 присоединяют хвостовик 11 винтового штампа 10 и, используя лебедку бурового станка, опускают их в пробуренную скважину до забоя скважины.
4. На устье скважины устанавливается фартук 23 и, используя показания инклинометров, с помощью компьютера, ось полой штанги устанавливают строго вертикально.
5. Используя механизм бурового станка, опускают вал 6, соединяют его с полой штангой 12, включают привод 5 и завинчивают винтовой штамп в грунт на глубину 30-40 см ниже забоя скважины.
6. Освобождают вал 6 от полой штанги 12 и поднимают вал в начальное положение. Затем в гнездо 8 вставляют консоль 7 и вал 6 опускают до упора в консоль.
7. Наверх полой штанги устанавливают опорную головку 15 с консолями 16 и датчик силы 19, который по беспроводной связи подключается к блоку сбора данных 20.
8. К низу консоли закрепляют сервопривод 9, который по беспроводной связи подключается к блоку сбора данных 20.
9. Испытания с целью определения параметров прочности грунтов.
9.1. По команде компьютера включают сервопривод 28 и с заданной скоростью (мм/мин) осуществляют вдавливание зонда в грунт, при этом снимают показания с датчиков трения, лобового сопротивления и порового давления. Показания датчиков при помощи блока сбора данных и управления 30 передаются по лицензионной частоте 2,5 ГГц на приемопередатчик 14, далее на блок сбора данных 20 и через интерфейс 21 записываются в память компьютера 22. Скорость вдавливания зонда и величина его перемещения контролируются числом импульсов, подаваемые на шаговый двигатель сервопривода. После полного выдвижения зонда из винтового штампа по команде компьютера отключают сервопривод.
9.2. Используя значения сил трения, лобового сопротивления и порового давления, определяются параметры прочности грунта угол внутреннего трения φ и силы удельного сцепления c, а используя соответствующие номограммы, определяют вид грунта.
10. Испытания с целью определения деформационных характеристик грунтов.
10.1. По команде компьютера включают сервопривод 9 и прикладывают осевую нагрузку на винтовой штамп 10 ступенями с выдержкой на каждой ступени до условной стабилизации осадки или непрерывно с заданной скоростью осадки (мм/мин). В базу данных записываются значения осадки винтового штампа sштампа, измеренные при помощи четырех датчиков линейных перемещений на поверхности грунта, и приложенное давление p под винтовым штампом. Одновременно в процессе нагружения винтового штампа записывают показания инклинометров, установленные внутри сегментов полой штанги и, используя следующую процедуру, определяют ошибку измерения осадки штампа за счет продольного изгиба полых штанг.
На фиг.4, 5 изображена полая штанга, состоящая для примера из трех сегментов полых штанг (К=3). Первый сегмент полой штанги находится сверху. Датчики наклона обозначены как S1, …, Sk. Длина одного сегмента полой штанги равна L. Вертикальная ось обозначается как V. Горизонтальные плоскости обозначены H1, … Hk. Измеряются углы наклона (фиг.4) относительно оси V в плоскостях VON (угол α) и VOE (угол β).
Для расчета вертикального перемещения (ΔLH) каждого сегмента полой штанги при их отклонении от вертикальной оси относительно горизонтальной плоскости (H) необходимы следующие исходные данные (фиг.5):
- α1, …, αk - измеренный угол наклона сегмента полой штанги в плоскости VON;
- β1, …, βk - измеренный угол наклона сегмента полой штанги в плоскости VOE;
- L - длина одного сегмента полой штанги;
- k - количество сегментов полой штанги.
Lvi - длина проекции i-го сегмента полой штанги на вертикальную ось V вычисляется по формуле:
Lvi=Lcosαicosβi.
Вертикальное перемещение каждого сегмента полой штанги при их отклонении от вертикали вычисляется по формуле:
ΔLHi=Li-Lvi.
Вертикальное перемещение всей полой штанги за счет изгиба вычисляется как сумма вертикальных перемещений отдельных сегментов полых штанг по формуле:
 .
.
10.2. Нагружение винтового штампа выполняют до нагрузки, определяемой в пределах линейного участка зависимости осадки винтового штампа от давления, причем давление определяется как сумма внешней нагрузки (те), веса полой штанги и винтового штампа, деленная на площадь винтового штампа.
10.3. Вычисляют расчетное значение осадки винтового штампа с учетом изгиба полой штанги:
s=sштампа-sштанги.
10.4. Используя расчетное значение осадки s и приложенное давление p, по формуле ГОСТ 20276-99 «Методы полевого определения характеристик деформируемости» находят штамповый модуль деформации:
где E - модуль деформации; v - коэффициент Пуассона; k1 - безразмерный коэффициент; d - диаметр штампа; k2 - безразмерный коэффициент; Δp - приращение давления; Δs - расчетное значение приращения осадки штампа, соответствующее приращению давления Δp и определенное с учетом изгиба буровой штанги.
11. Испытания с целью определения динамических характеристик грунтов.
11.1. Под один из триггеров вводится стальная пластина.
11.2. Используя молоток с массой 5-8 кг с датчиком силы, выполняют удар по стальной пластине. Синхронизация времени удара и начала записи колебаний грунта акселерометром 31 выполняется путем передачи сигнала с датчика силы по беспроводной связи через сенсорные узлы на блок сбора данных и управления 30 и запускает запись данных с акселерометра во внутреннюю память блока.
11.3. Возникшие упругие колебания грунта регистрируются акселерометром 31, акселерограмма колебаний записывается во внутреннюю память блока сбора данных и управления 30 и передается по команде компьютера по беспроводной связи последовательно через сенсорные узлы в память компьютера, находяегося на поверхности грунта.
11.4. Используя акселерограмму, находят скорость поперечной волны Vs.
11.5. Используя известное выражение, определяют скорость прохождения поперечной волны Vs и упругий модуль сдвига G:
 ,
,
где ρ - плотность грунта.
12. Отбор образцов грунта для лабораторных испытаний в ходе испытаний винтовым штампом.
12.1. Зонд заменяется тонкостенным цилиндрическим пробоотборником 36 (фиг.3), который после завинчивания в грунт винтового штампа, при помощи сервопривода 28 погружается в грунт под штамп, что приводит к отбору монолита грунта во внутреннюю полость пробоотборника.
12.2. Проводятся испытания винтовым штампом по пунктам 10-11.
12.3. После испытаний винтовым штампом включается сервопривод и пробоотборник вводится внутрь винтового штампа, после чего винтовой штамп поднимается на поверхность грунта.
12.4. Включается сервопривод и пробоотборник выдвигается из винтового штампа, затем вывинчивается и заменяется новым или зондом, в зависимости от цели испытаний.
Промышленная применимость
Данное изобретение промышленно реализуемо, обладает новыми, более широкими функциональными возможностями и высокой производительностью испытаний грунта в полевых условиях, повышенной точностью измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ И МЕХАНИЧЕСКИХ СВОЙСТВ ГРУНТОВ В ПОЛЕВЫХ УСЛОВИЯХ | 2012 |
|
RU2510440C2 |
| СПОСОБ ИСПЫТАНИЯ ГРУНТОВ СТАТИЧЕСКОЙ НАГРУЗКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252297C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИНЖЕНЕРНО-ГЕОЛОГИЧЕСКИХ ИЗЫСКАНИЙ | 2019 |
|
RU2706284C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СИЛ ТРЕНИЯ И МОДУЛЯ СДВИГА ГРУНТОВ В ПОЛЕВЫХ УСЛОВИЯХ | 2018 |
|
RU2705851C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ГРУНТОВ НА СЖИМАЕМОСТЬ ВИНТОВЫМ ШТАМПОМ | 2004 |
|
RU2258113C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ БУРЕНИЯ И ЗОНДИРОВАНИЯ | 2019 |
|
RU2712897C1 |
| Лопастный штамп | 1989 |
|
SU1675489A1 |
| Устройство для определения механических характеристик грунтов | 1991 |
|
SU1763569A1 |
| БИБЛИОТЕКА | 1973 |
|
SU367363A1 |
| Прибор для измерения несущей способности строительного материала | 2021 |
|
RU2766826C1 |
Предложенная группа изобретений относится к инженерно-геологическим изысканиям в строительстве и может быть использовано для определения деформационных и прочностных характеристик грунтов в полевых условиях. Техническим результатом является повышение точности измерений осадки винтового штампа, а также расширение функциональных возможностей и повышение производительности испытаний грунтов в полевых условиях. Способ испытания грунтов статической и динамической нагрузкой заключается в том, что испытание грунта проводят ступенями или непрерывно с заданной скоростью перемещения винтового штампа от заданной ступени нагрузки с учетом деформации за счет изгиба сегментов полой штанги. При этом устройство для осуществления указанного способа содержит винтовой штамп, полую насосную штангу, состоящую из сегментов, нагрузочное приспособление, измерительные приспособления, выполненные в виде датчика линейных перемещений, и механизм нагружения. Причем внутри каждого сегмента полой штанги введен сенсорный узел, включающий датчик наклона с цифровым выходом и приемопередатчик. Сенсорные узлы соединены в единую сенсорную сеть и передают информацию по радиочастоте друг другу и на удаленный компьютер. 2 н. и 9 з.п. ф-лы, 5 ил.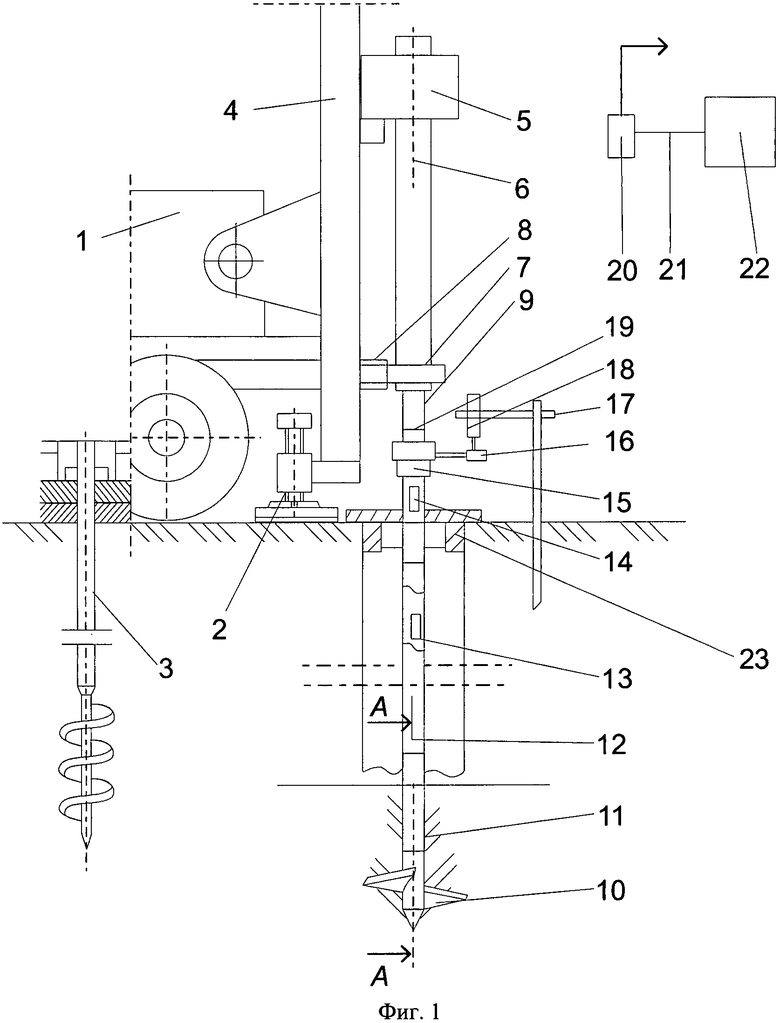
1. Способ испытания грунтов статической и динамической нагрузкой, использующий винтовой штамп, полую штангу, нагрузочное приспособление в виде силового гидроцилиндра, измерительные приспособления в виде датчика линейных перемещений и механизм нагружения, отличающийся тем, что испытание грунта проводят ступенями или непрерывно с заданной скоростью перемещения винтового штампа, измеряя осадку штампа от заданной ступени нагрузки с учетом деформации за счет изгиба сегментов полой штанги, при этом расчетное значение осадки штампа определяется из выражения:
s=sштампа-sштанги,
где s - расчетное значение осадки штампа; sштампа - измеренное значение осадки штампа датчиком линейных перемещений с поверхности грунта; sштанги - ошибка измерения осадки штампа за счет продольного изгиба полой штанги, которая определяется по измеренным значениям углов поворота сегментов полой штанги датчиками наклона и расчетной схемы с использованием выражения:
где ΔLHi - вертикальное перемещение каждого сегмента полой штанги при их отклонении от вертикали за счет изгиба полой штанги, испытание с целью определения динамической характеристики грунта проводят с использованием стальной пластины и молотка с датчиком силы, которым выполняют удар по стальной пластине, синхронизация времени удара и начала записи колебаний грунта акселерометром производят путем передачи сигнала с датчика силы по беспроводной связи через сенсорные узлы на блок сбора данных и управления, запускают запись данных с акселерометра во внутреннюю память блока, возникшие упругие колебания грунта регистрируют акселерометром, акселерограмма колебаний записывается во внутреннюю память блока сбора данных и управления и передается по команде компьютера по беспроводной связи через сенсорные узлы в память компьютера, находящегося на поверхности грунта, используя акселерограмму, находят скорость поперечной волны Vs и упругий модуль сдвига G:

где ρ - плотность грунта.
2. Способ по п.1, отличающийся тем, что одновременно на одной и той же глубине испытаний выполняют определение прочностных и деформационных характеристик грунтов.
3. Способ по п.1, отличающийся тем, что одновременно с испытаниями грунта винтовым штампом выполняют отбор монолитов грунта, проводят параллельные испытания образцов грунта в приборах трехосного сжатия, а значения расчетного модуля деформации принимают из сравнительного анализа результатов испытаний винтовым штампом и в условиях трехосного сжатия.
4. Способ по п.1, отличающийся тем, что в ходе испытания грунта винтовым штампом дополнительно определяют динамические характеристики грунтов.
5. Способ по п.1, отличающийся тем, что нагружение винтового штампа выполняют как ступенями, так и непрерывно с контролем скорости осадки винтового штампа и зонда.
6. Устройство для испытания грунтов статической и динамической нагрузкой для реализации способа по пп.1-5, включающее винтовой штамп, полую штангу, нагрузочное приспособление в виде силового гидроцилиндра, измерительные приспособления в виде датчика линейных перемещений, и механизм нагружения, отличающееся тем, что нагрузочное приспособление выполнено в виде полой штанги, собираемой из отдельных сегментов, внутри каждого сегмента введен сенсорный узел, включающий датчик наклона с цифровым выходом и приемопередатчик, при этом сенсорные узлы соединены беспроводной связью в единую сенсорную сеть и передают информацию по радиочастоте друг другу и на удаленный компьютер, находящийся на поверхности грунта.
7. Устройство по п.6, отличающееся тем, что нагрузочное приспособление имеет два сервопривода, один из которых расположен на поверхности грунта, а второй внутри винтового штампа, при этом управление работой сервоприводов выполняется автоматически по программе при помощи удаленного компьютера с использованием сенсорных узлов и беспроводной связи.
8. Устройство по п.6, отличающееся тем, что внутрь винтового штампа введен зонд, включающий датчик сил трения, датчик лобового сопротивления, датчик порового давления, при этом зонд соединен разъемным соединением с сервоприводом, а датчики подключены к сенсорному узлу.
9. Устройство по п.6, отличающееся тем, что в хвостовике винтового штампа размещен блок сбора данных и управления, включающий трехкоординатный акселерометр, усилитель сигналов, аналого-цифровой и цифроаналоговый преобразователи и внутреннюю память.
10. Устройство по п.6, отличающееся тем, что оно дополнительно содержит молоток, который имеет датчик силы, а синхронизация времени удара и начала записи колебаний грунта акселерометром выполняется путем передачи сигнала с датчика силы по беспроводной связи через сенсорные узлы на блок сбора данных и управления.
11. Устройство по п.7, отличающееся тем, что к сервоприводу внутри винтового штампа через разъемное соединение присоединен тонкостенный цилиндрический пробоотборник.
| СПОСОБ ИСПЫТАНИЯ ГРУНТОВ СТАТИЧЕСКОЙ НАГРУЗКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252297C1 |
| БИБЛИОТЕКА | 0 |
|
SU367363A1 |
| Способ испытания грунта статической нагрузкой | 1980 |
|
SU945276A1 |
| Винтовой штамп для испытания рыхлого грунта | 1989 |
|
SU1760988A3 |
| СПОСОБ ИСПЫТАНИЯ ГРУНТА СТАТИЧЕСКОЙ НАГРУЗКОЙ | 2002 |
|
RU2212494C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2366944C1 |
| RU 2008125936 A, 27.12.2009 | |||
| JP 11140858 A, 25.05.1999 | |||
| JP 2000178956 A, 27.06.2000 | |||
| JP 2001020268 A, 23.01.2001. | |||

