Изобретение относится к области вычислительной техники и может быть использовано в цифровых телевизионных и фотосистемах, глобальных систем позиционирования и наблюдения.
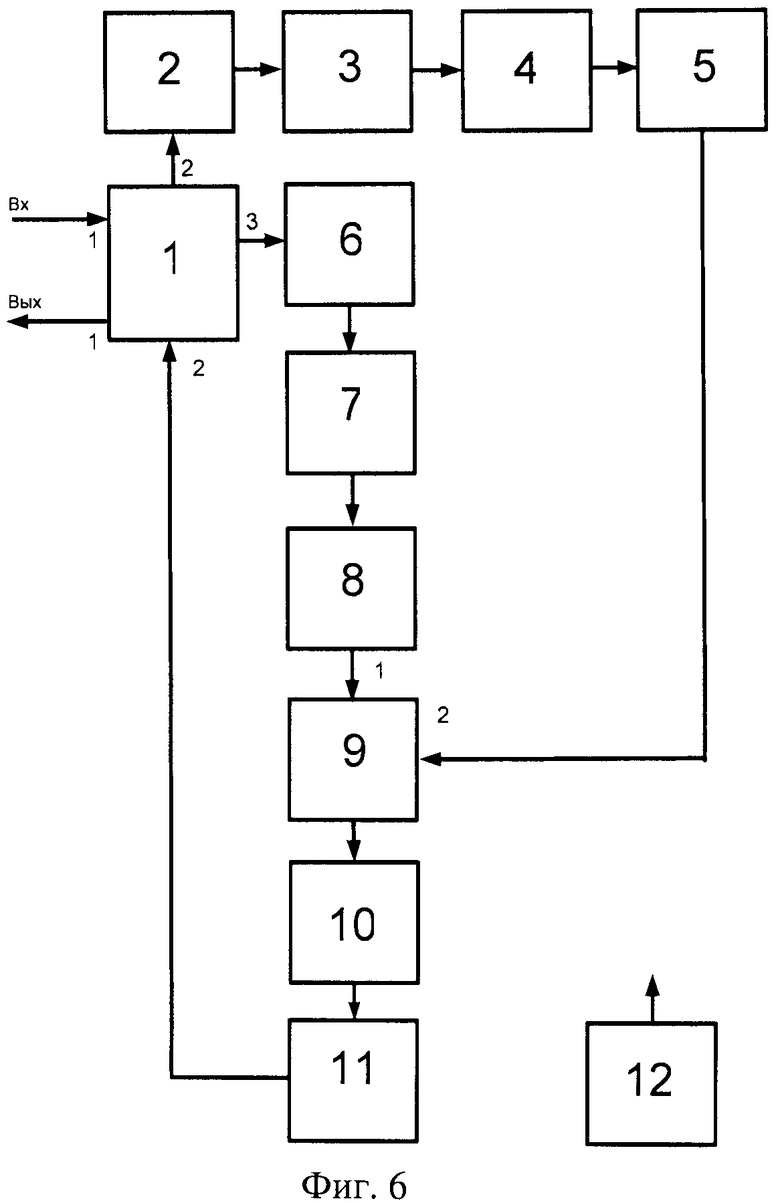
Упрощенная математическая модель изображения представляет собой двумерный дискретный сигнал  (фиг.1), где Si,j - доступные пиксели неискаженного изображения, ηi,j - область изображения с отсутствующими пикселями, δS - граница области S.
(фиг.1), где Si,j - доступные пиксели неискаженного изображения, ηi,j - область изображения с отсутствующими пикселями, δS - граница области S.
Основная решаемая задача - восстановление значений пикселей изображений.
Реконструкция и ретушь изображений предполагает удаление царапин, пятен, пыли, ненужных надписей, предметов и прочих дефектов с поверхности фотографий и восстановление недостающих фрагментов с использованием доступных участков изображения. При обработке архивных изображений, например изображений музейных документов или фотоизображений, возникает задача удаления различных дефектов (пятен, линий сгиба, других поврежденных областей) и восстановления поврежденных участков, не нарушая структуру изображения. В видеоданных встречаются статические изображения, которые мешают просмотру, закрывая часть полезной информации от зрителя. К таким изображениям относятся различные логотипы каналов, дата, время или субтитры, которые были наложены на фильм с дальнейшим кодированием. Также отдельным классом областей, мешающим просмотру видео, являются искаженные блоки при работе видеокодека, появление которых объясняется ненадежностью среды передачи данных от кодера к декодеру.
Упрощенно способы реконструкции значений пикселей изображений можно разделить на следующие группы:
1) Способы на основе решения дифференциальных уравнений в частных производных.
2) Способы на основе ортогональных преобразований.
3) Способы на основе синтеза текстур.
Анализ существующих способов обработки показывает, что область их использования в условиях ограниченного объема информации о составляющих обрабатываемого процесса крайне ограничена. Использование способов реконструкции значений пикселей изображений на основе решения дифференциальных уравнений в частных производных приводит к размытию резких перепадов яркостей и контуров и требует априорную информацию для выбора параметров способов и минимизации функционала. Неспособность восстанавливать текстуру изображений и изогнутые контуры ограничивает область использования данных способов, которые в основном применимы при удалении царапин и небольших дефектов на структуре изображений. Для использования способов на основе ортогональных преобразований требуется априорная информация для выбора порогового значения, ортогонального базиса и размера блоков спектрального представления. Также следует отметить, что данные способы приводят к размытию текстуры и структуры при восстановлении больших областей с потерянными пикселями, а большое количество итераций приводит к значительным вычислительным затратам. Применение способов на основе синтеза текстур требует априорной информации о размере и формы области восстановления и геометрических свойствах изображения для выбора параметров способов.
Известно цифровое сглаживающее устройство с предварительным обнаружением и устранением аномальных измерений [Патент №2010325, МПК G06F 15/353]. Данное устройство может быть использовано при обработке изображений, при этом потерянные пиксели принимаются за аномальные. Блок обнаружения и устранения аномальных измерений обеспечивает получение абсолютной величины разности  между текущим k-м отсчетом входного сигнала Sk и значением сглаженного выходного сигнала
между текущим k-м отсчетом входного сигнала Sk и значением сглаженного выходного сигнала  , схема сравнения обеспечивает сравнение сигнала абсолютной величины разности с кодом допустимого значения строба Δ и формирует на выходе признак превышения.
, схема сравнения обеспечивает сравнение сигнала абсолютной величины разности с кодом допустимого значения строба Δ и формирует на выходе признак превышения.
В сглаживающем устройстве реализуется следующий алгоритм сглаживания:
где величины mk и mk-1 определены как приведенное значение входного сигнала относительно своего среднего значения соответственно для k-го и (k-1)-го моментов текущего времени, которые равны:
Величина Δ есть допустимое значение строба приведенного отклонения входного сигнала, NC - значение коэффициента деления.
При проверке условия  , являющегося условием отсутствия ошибки, происходит переход на ту или иную ветвь вычислений. Если условие отсутствия ошибки не выполняется, то вычисленное значение mk считается неверным и вместо него для формирования текущего сглаженного значения используется предыдущее верное значение mk-1. Такая замена вследствие монотонности исходного сглаженного сигнала не ведет к его искажению. Если после этого на следующем шаге сглаживания условие отсутствия выполняется, то ошибка классифицируется как исправленное аномальное измерение. Невыполнение условия отсутствия ошибки является признаком отказа.
, являющегося условием отсутствия ошибки, происходит переход на ту или иную ветвь вычислений. Если условие отсутствия ошибки не выполняется, то вычисленное значение mk считается неверным и вместо него для формирования текущего сглаженного значения используется предыдущее верное значение mk-1. Такая замена вследствие монотонности исходного сглаженного сигнала не ведет к его искажению. Если после этого на следующем шаге сглаживания условие отсутствия выполняется, то ошибка классифицируется как исправленное аномальное измерение. Невыполнение условия отсутствия ошибки является признаком отказа.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, сравнение с пороговым уровнем, восстановление аномальных значений.
Недостатками известного способа и устройства, его реализующего, являются:
- процедура обнаружения неэффективна в случае обработки групповых аномальных значений;
- необходимо априорное знание допустимого значения строба Δ.
Причины, препятствующие достижению требуемого технического результата, заключаются в следующем:
- так как данный способ позволяет обнаруживать только одиночные аномальные значения, то эффективность обнаружения групповых аномальных значений будет низкой;
- величина Δ задается в зависимости от класса входных сигналов и области их применения.
Структурная схема устройства, реализующего рассмотренный алгоритм, содержит первый сумматор, счетчик отсчетов, первый и второй дешифраторы, первый и второй элемент И, элемент ИЛИ, триггер, блок задания коэффициента деления, первый регистр и второй сумматор, второй регистр, третий дешифратор, счетчик аномальных измерений, блок выделения модуля, схему сравнения, третий элемент и генератор тактовых импульсов.
Известен способ и устройство для заполнения объектов на основе растеризации изображений (Filling of graphical regions) [Patent USA №08/053, 212)]. Способ основан на растеризации изображений и включает анализ на пересечение с различными объектами каждого пикселя вдоль растровой строки края области восстановления. Приоритетные пиксели для восстановления определяются исходя из выбранного уровня заполнения данных и одним из множества различных объектов с высоким уровнем приоритетности.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, восстановление потерянных значений пикселей.
Недостатками известного способа и устройства, его реализующего, являются:
- априорная информация о структуре изображения и размере области восстановления для выбора параметров способа.
Известен способ восстановления изображений на основе решения дифференциальных уравнений в частных производных [Bertalmio М., Sapiro G., Caselles V., Ballester С. Image inpainting // Computer Graphics Proceedings, K.Akeley, Ed. ACM Press / ACM SIGGRAPH / Addison Wesley Longman, 2000. - P.417-424]. Данный способ позволяет соединять контуры постоянной яркости изображений поперек области восстановления с помощью решения дифференциальных уравнений в частных производных, минимизируя выбранный функционал.
Направление линий задается с помощью граничных условий на краю области восстановления, которые определяются с помощью выражения:

Дифференциальное уравнение в частных производных имеет решение при условии:
Данное выражение определяет направление продолжения линий с помощью сглаживающего оператора ΔS в область восстановления. Анизотропная диффузия вычисляется итерационно для всех пикселей с помощью выражения:

где k(i, j, t) - искривление двумерной плоскости S(i, j, t) в точке (i, j).
Граничные условия для восстановления изображения состоят в том, чтобы соответствовать интенсивности значений яркости изображения на границе области восстановления, а также направлению линий контуров.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, вычисление градиента, восстановление потерянных значений пикселей.
Недостатками известного способа и устройства, его реализующего, являются:
- сглаживание резких яркостных переходов изображений, что значительно ухудшает визуальное качество восстановленного изображения.
Известен нелинейный способ на основе адаптивного разряженного представления сигналов через нелинейные принципы приближения [Guleryuz O.G. Nonlinear approximation based image recovery using adaptive sparse reconstructions and iterated denoising // Part I: theory IEEE transactions on image processing, 2006. - V.15. - No.3]. Адаптивно определяется набор индексов спектральных коэффициентов, который предсказывает отсутствующую область изображения. Ортогональное преобразование для изображения запишется в виде:
D=GS,
где D - спектральные коэффициенты, G - матрица ортогонального преобразования изображения.
При этом можно записать, что G=[GI GJ], где I - обозначает незначимые коэффициенты в преобразовании, a J - значимые. Далее незначимые коэффициенты приравниваются к нулю:

При этом GI можно представить в виде двух составляющих - доступных и отсутствующих значений пикселей:
Тогда условие (2) запишется в виде:
Решение определяется итерационно и имеет вид:

где Р - константа, D - матрица значимых коэффициентов, k - номер итерации.
В качестве нулевой итерации используется заполнение области  случайными числами.
случайными числами.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, восстановление потерянных значений пикселей.
Недостатками известного способа и устройства, его реализующего, являются:
- априорная информация для выбора параметров способа, например, количество уровней, на которые разбивается область с потерянными пикселями, фактор перекрытия уровней разложения, размер блоков спектрального представления и пороговый уровень для определения значимых коэффициентов;
- восстановление значений пикселей происходит равнозначно для всех сторон области восстановления, что иногда приводит к тому, что структура изображения с контурами и перепадами яркости восстанавливается некорректно в центре области;
- использование данного способа приводит к размытию текстуры и структуры при восстановлении больших областей с потерянными пикселями, а количество итераций может достигать порядка 500, что приводит к значительным вычислительным затратам.
Известен способ восстановления текстуры и структуры изображений [Bertalmio M., Vese L., Sapiro G., Osher S. Simultaneous texture and structure image inpainting // Proceedings of the International Conference on Computer Vision and Pattern Recognition, 2003. - P.707-712.], который позволяет экстраполировать значения пикселей изображений как в структуре, так и текстуре изображений, при этом каждая составляющая представляется разряжено значимыми коэффициентами спектрального преобразования. Данный способ основан на декомпозиции изображения, называемого также морфологическим компонентным анализом, разделяющего изображение на линейную комбинацию текстуры и структуры изображения. Для восстановления текстуры используется курвет-преобразование, а для структуры - дискретное косинусное преобразование.
Изображение представляется в виде суммы:

где G - матрица ортогонального преобразования изображения, D - матрица значимых коэффициентов, s - структура изображения, t - текстура изображения.
При этом выражение целевой функции для определения значимых коэффициентов запишется в виде:


где М - маска области с потерянными пикселями, γ, λ - параметры способа, TV - total variation (корректировка с помощью модели общего отклонения), R - остаток, который на первой итерации равен случайному числу.
Признаки способа-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, восстановление потерянных значений пикселей.
Недостатками известного способа и устройства, его реализующего, являются:
- априорная информация о структуре изображения и размера области восстановления для выбора параметров способа;
- восстановление больших областей с помощью известного способа приводит к размытию структуры изображения, а большое количество итераций значительно осложняет вычислительные затраты.
Известен способ восстановления изображений на основе заполнения похожими областями и устройство, его реализующее (Image region filling by exemplar-based inpainting) [Patent USA №11/095,138, №10/453,404].
На первом шаге вычисляется приоритет Р(р) для каждого пикселя границы, который состоит из двух множителей:


где p - текущий пиксель на границе доступных пикселей;
С(p) - данные доверия;
D(p) - данные градиента;
 - количество пикселей квадратного блока с центром в пикселе р;
- количество пикселей квадратного блока с центром в пикселе р;
 - вектор, ортогональный градиенту в точке р;
- вектор, ортогональный градиенту в точке р;
np - вектор, ортогональный границе δS в точке р;
α - нормированный множитель, для черно-белых изображений равен 255.
Вначале предполагается, что значение данных доверия С для пикселей из области S равно 1, а для области  равно 0.
равно 0.
Вычисление приоритета с помощью выражения (1) позволяет придать больший вес пикселям, находящимся на перепадах яркости (границах), таким образом, восстанавливая их в первую очередь. Учет данных доверия С(р) позволяет присваивать меньший вес восстановленным пикселям при увеличении дистанции от доступных пикселей из области S.
На втором шаге находится блок ψq в области доступных пикселей S, для которого евклидова норма минимальна:

Значения пикселей из найденного блока копируются в области  . Данные доверия С для восстановленных пикселей присваиваются равным текущему значению С(р). Процедура пересчета приоритета и поиска похожих областей с последующей заменой повторяется.
. Данные доверия С для восстановленных пикселей присваиваются равным текущему значению С(р). Процедура пересчета приоритета и поиска похожих областей с последующей заменой повторяется.
Признаки устройства-аналога, совпадающие с признаками заявляемого технического решения, следующие: запоминание цифрового сигнала, вычисление коэффициента приоритета, поиск похожих блоков, восстановление потерянных значений пикселей.
Недостатками известного устройства являются:
- видимость границ на восстановленном изображении между найденными похожими блоками;
- неправильное восстановление при отсутствии похожего блока;
- зависимость эффективности восстановления от выбора размера блока.
Наиболее близким к изобретению является устройство обработки двумерных сигналов при реконструкции изображений [Заявка №2010132434, МПК G06F 17/17]. Рассматриваемое устройство-прототип предполагает:
1) записываются значения входного изображения 
2) определяется значение коэффициента доверия С,  , если
, если  , если
, если  ;
;
3) вычисляется значение приоритета Р(δSi,j) для каждого значения пикселя границы Р(δSi,j)=С(δSi,j)·D(δSi,j), где

4) определяется пиксель p∈(i,j) с максимальным значением приоритета max(P(δSi,j)) на границе δS;
5) определяется квадратная форма области для поиска подобия Ψp с центральным пикселем р∈(i,j);
6) вычисляется евклидова метрика для всех доступных значений пикселей изображения  ,
,  ;
;
7) количество блоков подобия R определяется с помощью доверительного интервала:

где:  ; α - уровень значимости;
; α - уровень значимости;
8) значения пикселей в области η, смежные к пикселю с максимальным приоритетом р, восстанавливаются путем усреднения соответствующих пикселей найденных областей  из области доступных пикселей Si,j:
из области доступных пикселей Si,j:
9) коэффициент доверия С для восстановленных пикселей присваивается равным текущему значению С(р). После чего процедура пересчета приоритета и поиска похожих областей с последующей заменой повторяется.
Устройство для восстановления изображений содержит блок хранения изображения, блок хранения пикселей, блок создания словаря, блок хранения словаря, блок поиска подобия, блок обработки, блок вычисления приоритета, блок определения адаптивной формы, блок усреднения пикселей, блок заполнения изображения.
Недостатками известного устройства-прототипа являются;
- неправильное восстановление при отсутствии похожего блока;
- зависимость эффективности восстановления от структуры изображения.
Причины, препятствующие достижению требуемого технического результата, заключаются в следующем:
- отсутствие похожего блока приводит к неправильному восстановлению, так как замена пикселей происходит на пиксели блока, для которого евклидова метрика минимальна, даже в том случае если она имеет большое значение по абсолютной величине;
- на изображении при поиске похожих блоков не учитывается их ориентация.
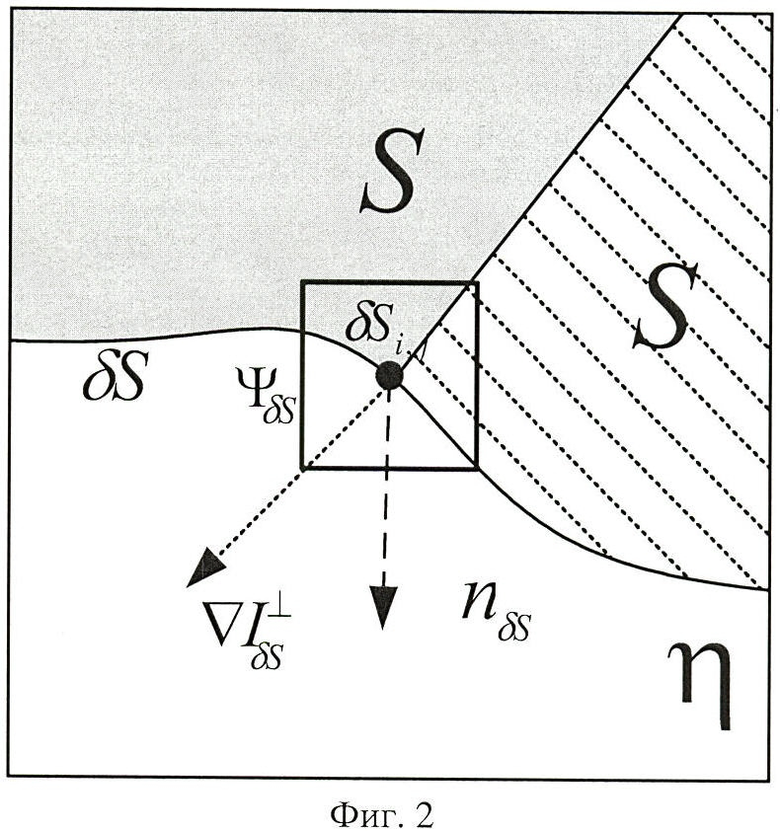
Предлагаемое устройство для восстановления изображений позволяет уменьшить погрешность восстановления изображений за счет увеличения количества похожих блоков, путем их поворота. Устройство реализуют следующий алгоритм. На первом шаге вычисляется значение приоритета P(δSi,j) для каждого значения пикселя границы, который состоит из двух множителей (фиг.2):


где δSi,j - текущий пиксель на границе доступных пикселей; С(δSi,j) - коэффициент доверия; D(δSi,j) - коэффициент градиента; ΨδSi,j - квадратный блок пикселей с центром в пикселе δSi,j;  - количество пикселей квадратного блока,
- количество пикселей квадратного блока,
 вектор, ортогональный градиенту в точке δSi,j; nδSi,j - вектор, ортогональный границе δS в точке δSi,j; α - нормированный множитель, который для восьми битных изображений равен 255.
вектор, ортогональный градиенту в точке δSi,j; nδSi,j - вектор, ортогональный границе δS в точке δSi,j; α - нормированный множитель, который для восьми битных изображений равен 255.
Вначале предполагается, что значение коэффициента доверия С для пикселей из области  равно 1, а для области η равно 0.
равно 1, а для области η равно 0.
Вычисление приоритета с помощью выражения (3) позволяет придавать больший вес пикселям, которые находятся на перепадах яркости (границах), таким образом, восстанавливая их в первую очередь. Учет коэффициента доверия С(δSi,j) позволяет присваивать меньший вес восстановленным пикселям при увеличении расстояния от доступных пикселей из области .
На втором шаге, для пикселя p∈(i,j) с максимальным значением приоритета max(P(δSi,j)) на границе δS с помощью способа инверсий адаптивно определяется форма области для поиска подобия, что позволяет корректно учитывать форму области восстановления и не захватывать лишние границы, которые могут привести к неправильной реконструкции изображения.
Для формирования адаптивных областей двумерного сигнала для пикселя p∈(i,j) задаются восемь направлений  , в которых определяются интервалы квазистационарности. Условие квазистационарности проверяется с помощью вычисления случайной величины τ, равной сумме числа инверсий значений пикселей в каждом из направлений двумерного сигнала , в котором присутствуют доступные пиксели.
, в которых определяются интервалы квазистационарности. Условие квазистационарности проверяется с помощью вычисления случайной величины τ, равной сумме числа инверсий значений пикселей в каждом из направлений двумерного сигнала , в котором присутствуют доступные пиксели.
Например, сумма числа инверсий для направления 5 равна:

где Si+l,j, l=0…d-1 - текущее значение пикселя изображения с координатами (i+l,j); Si+k,j, k=l+1…d - последующие значения пикселей изображения по j-ому столбцу (движение в направлении 5), R - максимальная длина интервала квазистационарности.
Количество сочетаний, для которых вычисляется сумма инверсий, составляет:
Первая альтернатива (убывающий сигнал) принимается, если 
Правило для принятия второй альтернативы (возрастающий сигнал) имеет вид 
где α - значение ошибки первого рода.
Гипотеза о стационарности сигнала принимается, если

По полученным границам интервалов для каждого из восьми секторов, образованных направлениями 1-2, 2-3, 3-4, 5-6, 7-8, 8-1, происходит формирование областей квазистационарности. Для этого используется линейная интерполяция границ смежных интервалов уравнением прямой, проходящей через две точки:
 ,
, 
где (i1,j1) - координаты границы направления h, (i2,j2) - координаты границы направления h+1.
Значения пикселей, попавшие между всеми направлениями и интерполирующими прямыми проходящими через границы интервалов квазистационарности, объединяются в одну область Ω.
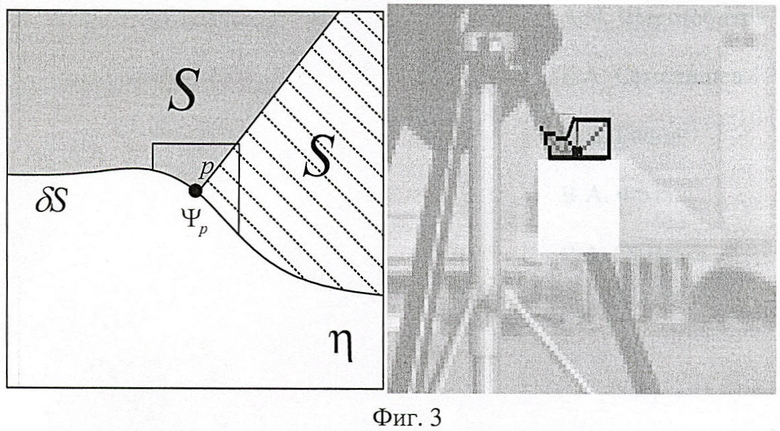
Для пикселя границы смежного с пикселем p∈(i,j), имеющего большее значение  также определяется адаптивно область с помощью способа инверсий. Каждая из полученных областей является квазистационарной, и они находятся по разные стороны от перепада яркости. Данные области объединяются в одну (фиг.3), таким образом, определяется область Ψр с адаптивными размерами и перепадом яркости.
также определяется адаптивно область с помощью способа инверсий. Каждая из полученных областей является квазистационарной, и они находятся по разные стороны от перепада яркости. Данные области объединяются в одну (фиг.3), таким образом, определяется область Ψр с адаптивными размерами и перепадом яркости.
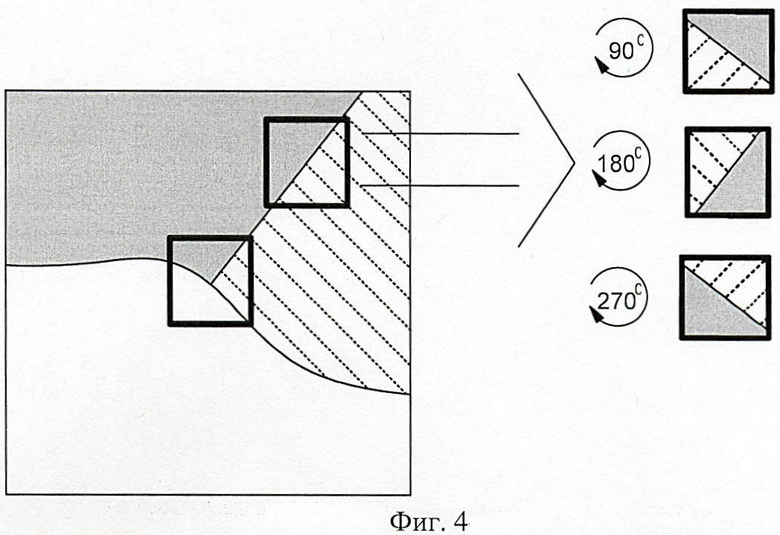
Определяется пиксель p∈(i,j) с максимальным значением приоритета max(P(δSi,j)) на границе δS и выбирается адаптивная область Ψp, принадлежащая данному пикселю, использование которой позволяет корректно учитывать форму области восстановления и не захватывать лишние границы, которые могут привести к неправильной реконструкции изображения. Далее количество блоков, полученных из исходного изображения с доступными пикселями, увеличивается путем их поворота на 90, 180, 270 градусов. Данный подход позволяет уменьшить погрешность восстановления изображения за счет увеличения количества блоков и увеличения вероятности нахождения более похожего блока по евклидовой метрике (фиг.4)
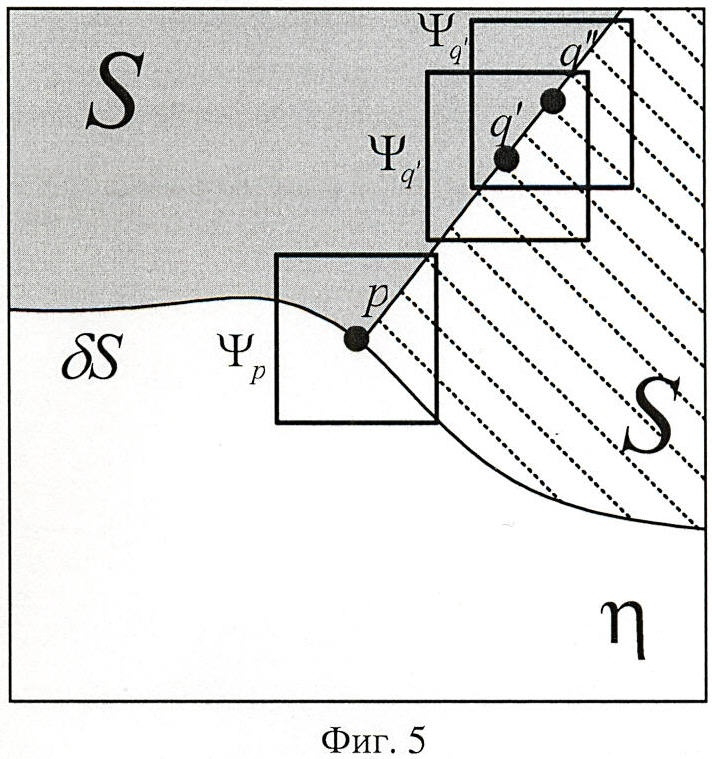
На третьем шаге находятся блоки  , в области доступных пикселей Si,j, для которых евклидова метрика минимальна (фиг.5):
, в области доступных пикселей Si,j, для которых евклидова метрика минимальна (фиг.5):
 ,
,
при этом h обозначает порядковые номера подобных блоков, ранжированных по евклидовой метрике.
Количество блоков подобия R определяется с помощью доверительного интервала:

где ; α - уровень значимости.
Значения пикселей в области η, смежные к пикселю с максимальным приоритетом р, восстанавливаются путем усреднения соответствующих пикселей найденных областей  из области доступных пикселей Si,j:
из области доступных пикселей Si,j:
Коэффициент доверия С для восстановленных пикселей присваивается равным текущему значению С(р). После чего процедура пересчета приоритета и поиска похожих областей с последующей заменой повторяется.
Устройство для восстановления изображений (фиг.6) содержит блок хранения изображения 1, первый вход которого является информационным входом устройства, второй выход которого подключен к входу блока хранения пикселей 2, выход которого подключен к входу блока поворота 3, выход которого подключен к входу блока создания словаря 4, выход которого подключен к входу блока хранения словаря 5, выход которого подключен ко второму входу блока поиска подобия 9; третий выход блока хранения изображения 1 подключен к входу блока обработки 6, выход которого подключен к входу блока вычисления приоритета 7, выход которого подключен к входу блока определения адаптивной формы 8, выход которого подключен к первому входу блока поиска подобия 9, выход которого подключен к входу блока усреднения пикселей 10, выход которого подключен к входу блока заполнения изображения 11, выход которого подключен ко второму входу блока хранения изображения 1, первый выход которого является информационным выход устройства; синхронность работы устройства обеспечивается генератором тактовых импульсов 12.
Устройство для восстановления изображений реализуется следующим образом. На вход блока хранения изображения поступает изображение с потерянными пикселями. Доступные пиксели сохраняются в блоке хранения пикселей. В блоке создания словаря создаются двумерные матрицы, учитывая поворот изображения перед созданием словаря. Данные матрицы используются для заполнения участков изображения с потерянными пикселями. Заполнение происходит для пикселей, смежных к пикселю, для которого приоритет оказывается максимальным. Обработка происходит итеративно, до тех пор пока все пиксели в блоке хранения изображения не будут восстановлены, после чего полученные значения поступают на информационный выход устройства.
Устройство для восстановления изображений работает следующим образом. На вход блока хранения изображения 1 поступает изображение с потерянными пикселями. Доступные пиксели сохраняются в блоке хранения пикселей 2, далее они поворачиваются на 90, 180, 270 градусов в блоке поворота 3 и поступают на вход блока создания словаря 4. Результат формирования словаря сохраняется в блоке хранения словаря 5, полученные двумерные матрицы используются далее для восстановления изображения. Матрицы создаются путем формирования квадратных блоков размером 15 на 15 пикселей из исходного изображения путем смещения блока по всем доступным пикселям изображения. В блоке обработки 6 происходит формирование граничных пикселей вокруг области с потерянными пикселями из блока хранения изображения 1. Далее информация о граничных пикселях поступает на вход блока вычисления приоритета 7, в котором вычисляется приоритет для всех граничных пикселей, который состоит из двух множителей: коэффициент доверия и коэффициент градиента. В данном блоке также осуществляется ранжировка приоритета и определение граничного пикселя с максимальным значением приоритета. В блоке определения адаптивной формы 8 вокруг пикселя с максимальным значением приоритета формируется адаптивная область близких по яркости пикселей с помощью способа инверсий. Адаптивная область поступает на вход блока поиска подобия 9, в котором осуществляется вычисление евклидовой метрики со всеми двумерными матрицам, которые хранятся в блоке хранения словаря 5. В блоке поиска подобия 9 также определяется количество похожих блоков, для которых евклидова метрика не превосходит порогового значения. Данные блоки поступают на вход блока усреднения пикселей 10, в котором происходит формирование усредненной оценки. Полученная оценка поступает в блок заполнения изображения 11, который копирует значения пикселей, смежных к пикселю с максимальным приоритетом, из усредненной оценки в блок хранения изображения 1 на соответственные координаты. Далее процесс вычисления приоритета с поиском похожих блоков и последующей заменой повторяется до тех пор, пока не будут восстановлены все значения в блоке хранения изображения 1. Синхронность работы устройства обеспечивается генератором тактовых импульсов 12.
Технический результат - реконструкция значений пикселей изображений в условиях неполной априорной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ДВУМЕРНЫХ СИГНАЛОВ ПРИ РЕКОНСТРУКЦИИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2440614C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ ДВУМЕРНЫХ СИГНАЛОВ НА ОСНОВЕ РЕКОНСТРУКЦИИ ИСКАЖЕННЫХ ПИКСЕЛЕЙ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2582554C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ ИСКАЖЕННЫХ ЗНАЧЕНИЙ ПИКСЕЛЕЙ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2580456C1 |
| УСТРОЙСТВО РЕДАКТИРОВАНИЯ ВИДЕОПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2014 |
|
RU2572377C1 |
| Устройство восстановления папиллярных узоров оптечатка пальца | 2019 |
|
RU2718426C1 |
| Устройство восстановления изображений в пространстве кватернионов с использованием анизотропного градиента и нейронной сети | 2020 |
|
RU2754965C1 |
| Устройство для восстановления карты глубины с поиском похожих блоков на основе нейронной сети | 2019 |
|
RU2716311C1 |
| Устройство сжатия изображений на основе метода реконструкции пикселей | 2020 |
|
RU2750416C1 |
| Устройство для реконструкции изображений на основе хэш-функций | 2017 |
|
RU2661534C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ КАРТЫ ГЛУБИНЫ СЦЕНЫ | 2014 |
|
RU2580466C1 |
Изобретение относится к области вычислительной техники. Техническим результатом является реконструкция значений пикселей изображений в условиях неполной априорной информации. Устройство содержит блок хранения изображения, блок хранения пикселей, блок поворота, блок создания словаря, блок хранения словаря, блок обработки, блок вычисления приоритета, блок поворота, блок определения адаптивной формы, блок поиска подобия, блок усреднения пикселей, блок заполнения изображения, генератор тактовых импульсов. 6 ил.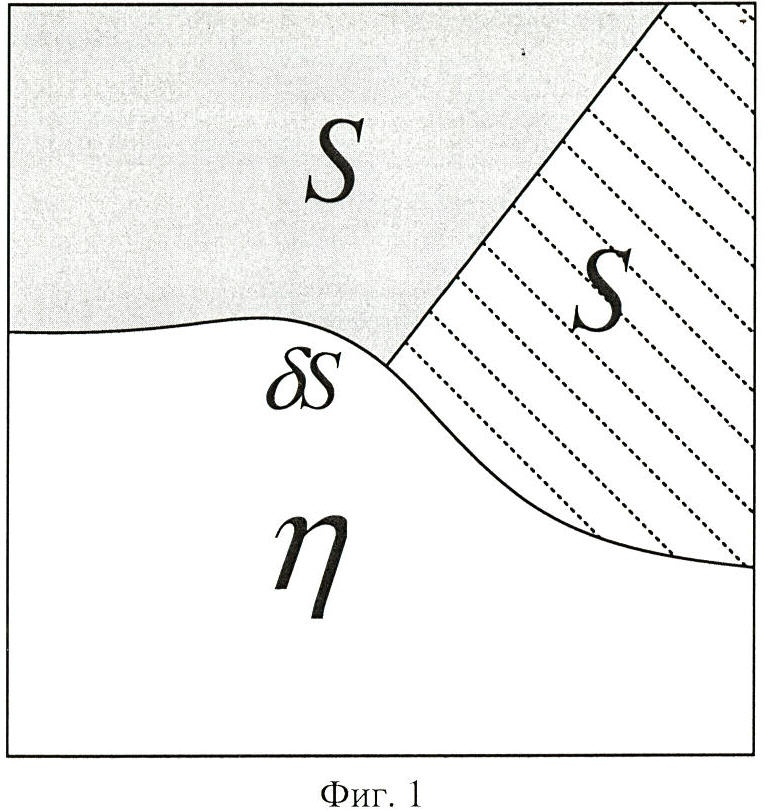
Устройство для восстановления изображений, содержащее блок хранения изображения, первый вход которого является информационным входом устройства, второй выход которого подключен к входу блока хранения пикселей; выход блока создания словаря подключен к входу блока хранения словаря, выход которого подключен ко второму входу блока поиска подобия; третий выход блока хранения изображения подключен к входу блока обработки, выход которого подключен к входу блоку вычисления приоритета, выход которого подключен к входу блока определения адаптивной формы, выход которого подключен к первому входу блока поиска подобия, выход которого подключен к входу блока усреднения пикселей, выход которого подключен к входу блока заполнения изображения, выход которого подключен ко второму входу блока хранения изображения, первый выход которого является информационным выходом устройства, отличающееся тем, что выход блока хранения пикселей подключен к входу блока поворота, выход которого подключен к входу блока создания словаря, синхронность работы устройства обеспечивается генератором тактовых импульсов.
| СИСТЕМЫ И СПОСОБЫ МОДЕЛИРОВАНИЯ ДАННЫХ В ОСНОВАННОЙ НА ПРЕДМЕТАХ ПЛАТФОРМЕ ХРАНЕНИЯ | 2003 |
|
RU2371757C2 |
| ПРЕДСКАЗАТЕЛЬНОЕ КОДИРОВАНИЕ БЕЗ ПОТЕРЬ ДЛЯ ИЗОБРАЖЕНИЙ И ВИДЕО | 2005 |
|
RU2355127C2 |
| ЕР 0987873 А2, 22.03.2000 | |||
| ЕР 1376382 А2, 02.01.2004. | |||

