Изобретение относится к области контрольно-измерительной техники, в частности к автономным самодвижущимся рентгеновским агрегатам, предназначенным для контроля качества кольцевых сварных швов магистральных газо- и нефтепроводов методом просвечивания проникающим излучением, и может быть использовано в энергетической, газодобывающей, нефтедобывающей промышленности, при строительстве газо- и нефтепроводов или их ремонте.
Рентгенографический контроль сварных швов магистральных нефтегазопроводов является неотъемлемой частью технологического процесса при их строительстве. Основной целью контроля качества является повышение надежности и безопасности эксплуатации трубопроводов.
Известен способ неразрушающего контроля качества кольцевых сварных швов магистральных трубопроводов по патенту №2123683 [1]. Способ реализован на самоходном рентгеновском дефектоскопе, известном под названием «Сирена-5», включающем самоходную тележку с электрическим двигателем, на которой установлены рентгеновский излучатель с источником питания и таймером экспозиции и детектор с электронной схемой управления. В качестве излучателя использован импульсный рентгеновский аппарат «Арина-05-2М». Управление перемещением дефектоскопа внутри трубы осуществляется с помощью командного аппарата, в качестве которого использован портативный импульсный рентгеновский аппарат типа «Арина-1», устанавливаемый снаружи трубы на определенном расстоянии от контролируемого шва. Включение аппарата «Арина-1» осуществляют дистанционно с выносного пульта управления с расстояния 10-20 м. Рентгенографию изображения сварного шва осуществляют на рентгеновской пленке, предварительно наложенной на контролируемый шов.
Однако аппарат «Сирена 5» не предназначен для проведения 100%-ного контроля, когда контролируется каждый шов. Кроме того, рентгеновские аппараты «Арина-01» (используемый в качества устройства управления передвижным дефектоскопом) и «Арина-05» (устанавливается непосредственно на передвижной дефектоскоп) относятся к классу импульсных наносекундных рентгеновских аппаратов, имеющих гораздо меньшую интенсивность излучения, чем аппараты постоянного излучения. Их используют либо при просвечивании трубопроводов с тонкой стенкой, либо используют специальную рентгеновскую пленку для импульсных рентгенаппаратов, которая имеет небольшую длину (приходится соединять несколько пленок в специальных кассетах, в которые вставляются усилительные экраны), что делает процесс просвечивания трудоемким и затяжным.
В настоящее время выпускается целый ряд приборов и устройств, обеспечивающих процесс получения рентгенографических снимков при строительстве трубопроводов.
Наиболее удобным и производительным является устройство, называемое «Кроулер», которое способно самостоятельно перемещаться внутри трубы от шва к шву и по команде оператора включать рентгеновское излучение для получения снимка.
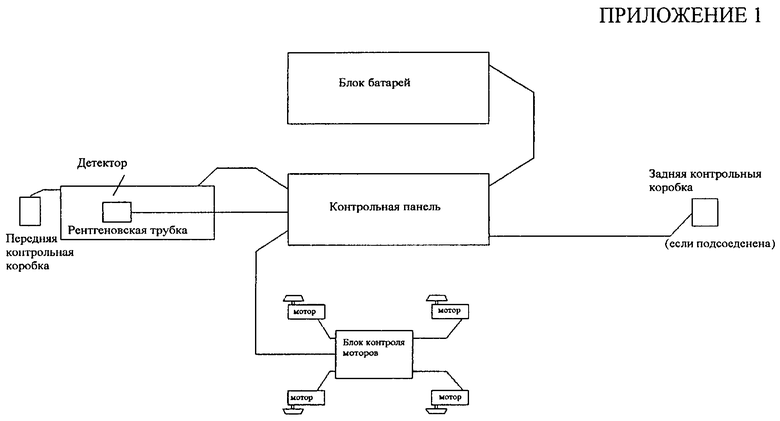
Известно устройство «Krawler» производства фирмы Solus Schall (Англия) [2]. Устройство представляет собой внутритрубный аппарат с электроприводом, автономным питанием и с наружным управлением посредством радиактивного источника малой активности (10 mCi Цезий 137). К недостаткам этого устройства можно отнести использование в качестве системы управления радиоактивного источника, что делает невозможным использование аппарата без специальных условий хранения и разрешительных документов в соответствии с «Основными санитарными правилами обеспечения радиационной безопасности» (ОСПОРБ-99).
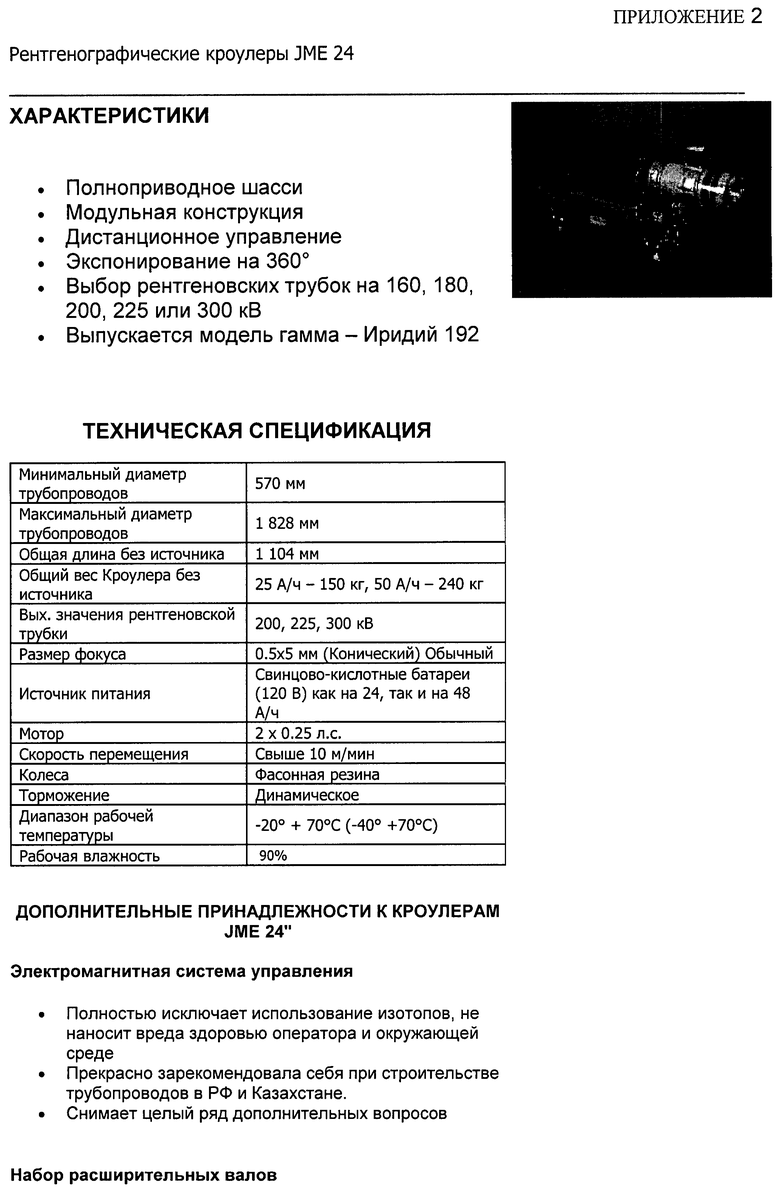
Известны мобильные агрегаты-кроулеры для диагностики качества стыковых сварных соединений при строительстве и эксплуатации магистральных трубопроводов фирмы JME Ltd. (США) [3, 4], содержащие самоходное полноприводное шасси с платформой, на которой размещены блок аккумуляторов, собранный на основе свинцово-кислотных батарей, источник рентгеновского излучения с блоком детекторов, расположенные на платформе, управляющий источник гамма-излучения, выполненный на базе изотопа (цезий-137) или электромагнитный передатчик, многодиапазонный генератор рентгеновской трубки, блок коммутации, блок управления, выходы которого связаны с элементами управления агрегатом.
На рентгеновской трубке установлен приемник команд, подаваемых оператором снаружи трубопровода с помощью управляющего источника на базе изотопа (цезий-137) или электромагнитного передатчика (см. [3], лист 5. Блок-схема кроулера JME 24).
По совокупности признаков Кроулер JME 24 [3, 4] с системой электромагнитного управления движением и рабочим процессом принят в качестве наиболее близкого аналога. Управление производится оператором, который находится рядом с контролируемым объектом. Система электромагнитного управления выгодно отличается от широко распространенных систем управления на изотопах тем, что, во-первых, не оказывает вредного влияния на организм человека и окружающую среду; во-вторых, не требует особых мер предосторожности при транспортировке и хранении; в-третьих, не требует особых условий захоронения и утилизации (Интернет-ресурс www.tkc-ndt.ru. Клюев З.В., Сутулов М.Е. Надежный контроль - основа экологической безопасности. ООО «Трубопровод Контроль Сервис»).
Принцип системы электромагнитного управления основан на прохождении низкочастотного электромагнитного сигнала, генерируемого передатчиком, через стенку трубопровода и приеме этого сигнала приемным устройством, расположенным на устройстве. Приемник имеет два датчика, сигналы от которых после обработки в итоге формируют команды исполнения:
- движение вперед
- остановка
- движение назад
- излучение.
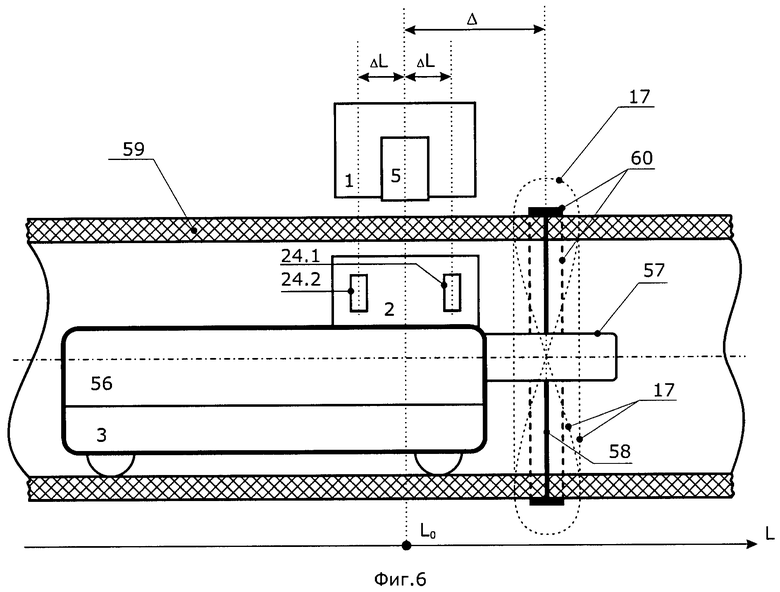
Приемное устройство 2 расположено внутри трубопровода 59 со смещением Δ относительно выхода излучения 17 рентгеновской трубки 57, чтобы вектор направления излучения не пересекал приемное устройство 2 (Фиг.6).
Команда движения («Вперед» или «Назад») создается переносом оператором передающего устройства 1 снаружи трубопровода над приемным устройством 2 в сторону необходимого перемещения. При этом сигнал появляется сначала на первом датчике 24.1, затем на втором 24.2, далее исчезает на первом, затем исчезает на втором. Когда кроулер подает звуковой сигнал движения в соответствующую сторону, оператор, опережая движение кроулера, передвигается в ту же сторону до исследуемого сварного шва 58. Достигнув его, оператор устанавливает передающее устройство 1 перед контролируемым швом на расстоянии Δ от сварного шва (точка L0), равном расстоянию смещения центра приемного устройства 2 относительно выхода излучения 17 рентгеновской трубки 57, который должен быть расположен в плоскости сварного шва 58. Далее, на сварной шов накладывают рентгеновскую пленку 60. После этого подают команду на излучение рентгеновской трубки 57 выключением передающего устройства 1 с последующим включением или его поднятием вертикально с последующим опусканием. При этом происходит одновременное исчезновение сигналов на обоих датчиках 24.1 и 24.2, затем одновременно их появление, что и является командой на включение излучения рентгеновской трубки 57.
Однако известное устройство имеет недостаточную точность позиционирования. Условием останова кроулера является присутствие на обоих датчиках приемного устройства 2 электромагнитных сигналов со значением, равным или выше заданного уровня. Поэтому кроулер останавливается не тогда, когда приемное устройство 2 находится точно над передающим устройством 1, а раньше, когда на более отдаленном от передающего устройства датчике электромагнитный сигнал достигнет заданного уровня. При этом на более близко расположенном датчике этот сигнал будет выше заданного уровня. В этом случае подъем или выключение оператором передающего устройства 1 с целью подачи команды кроулеру на включение излучения рентгеновской трубки 57 может быть интерпретировано им (кроулером) как команда движения, что является недопустимым.
Кроме того, известное устройство обладает недостаточной радиационной безопасностью. После подачи команды на излучение исполнительное устройство (кроулер) запускает излучение рентгеновской трубки 57 с задержкой 10 сек для того, чтобы оператор успел отойти на безопасное расстояние. Однако из-за различных обстоятельств (затрудненное перемещение из-за особенностей грунта: глубокий снег, грязь, горная порода, различные препятствия; общая утомляемость вследствие периодически возникающей необходимости быстрого передвижения; падения; невозможность контролирования несанкционированного появления посторонних лиц в опасной зоне в момент перемещения на безопасное расстояние) отведенного времени может оказаться недостаточно.
По совокупности признаков Кроулер JME 24 [3, 4] принят в качестве наиболее близкого аналога.
Техническим результатом заявленного изобретения является улучшение эксплуатационных характеристик системы управления перемещением устройства диагностики трубопровода за счет повышения точности позиционирования устройства. Дополнительным техническим результатом является повышение уровня радиационной безопасности.
Заявляемый технический результат достигается тем, что система управления перемещением устройства диагностики трубопровода (УДТ), состоящая из передающего устройства, содержащего излучатель низкочастотного электромагнтного сигнала, и внутритрубной части, представляющей собой самоходную тележку с размещенными на ней рентгеновской трубкой и приемным устройством, предназначенным для приема сигналов передающего устройства, обработки их и управления исполнительным устройством, исполнительного устройства, содержащего двигатель тележки, при этом приемное устройство содержит приемные каналы, преобразующие электромагнитный сигнал, генерируемый передающим устройством, в электрические сигналы управления исполнительного устройства, причем приемные каналы подключены к формирователям сигналов, выходы которых являются первым и вторым выходами приемного устройства, подключенных к первому и второму входам исполнительного устройства соответственно, отличающаяся тем, что приемное устройство дополнительно содержит третий формирователь, первый и второй входы которого подключены к выходам первого и второго приемных каналов соответственно, а выход, являющийся третьим выходом приемного устройства, к третьему входу исполнительного устройства.
При этом каждый приемный канал содержит последовательно соединенные датчик, полосовой фильтр, аттенюатор, выпрямитель, причем выход выпрямителя является выходом приемного канала.
При этом в системе управления перемещением третий формирователь содержит первый и второй дифференциальные усилители, первый, второй, третий и четвертый диоды, первый, второй третий и четвертый резисторы и компаратор, причем неинвертирующий вход первого дифференциального усилителя, являющийся первым сигнальным входом третьего формирователя подключен к инвертирующему входу второго дифференциального усилителя и к аноду первого диода, а инвертирующий вход первого дифференциального усилителя, являющийся вторым сигнальным входом третьего формирователя, подключен к неинвертирующему входу второго дифференциального усилителя и к аноду второго диода, катод которого подключен к катоду первого диода и к первому выводу первого резистора, второй вывод которого подключен к первым выводам второго и третьего резисторов и к неинвертирующему входу компаратора, выход которого, являющийся выходом третьего формирователя, подключен ко второму выводу третьего резистора, причем выходы первого и второго дифференциальных усилителей подключены к анодам соответственно третьего и четвертого диодов, катоды которых подключены друг к другу, а также подключены к инвертирующему входу компаратора и к первым выводам четвертого и пятого резисторов, второй вывод которых подключен соответственно к общему проводу и к источнику напряжения, причем общий провод подключен ко второму выводу второго резистора.
Заявляемый технический результат достигается также тем, что передающее устройство дополнительно содержит пульт дистанционного управления (ПДУ), соединенный по радиоканалу с приемником ПДУ, выход которого подключен к управляющему входу генератора.
Заявляемая система управления перемещением устройства диагностики трубопровода иллюстрируется следующими графическими материалами:
Фиг.1 - общая блок-схема системы управления перемещением устройства диагностики трубопровода.
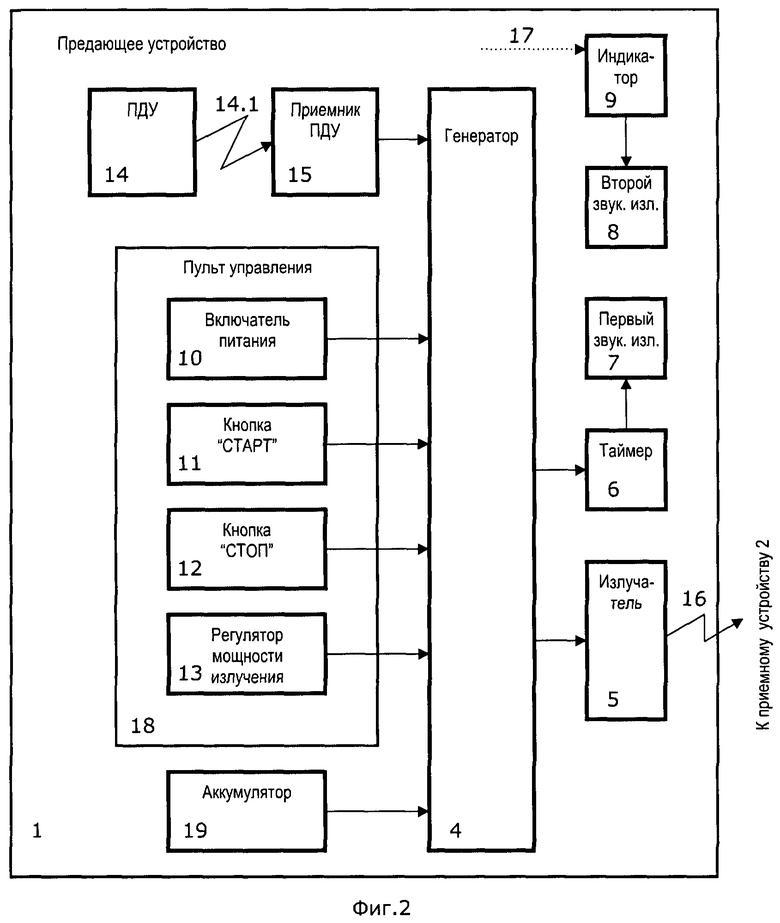
Фиг.2 - функциональная схема передающего устройства.
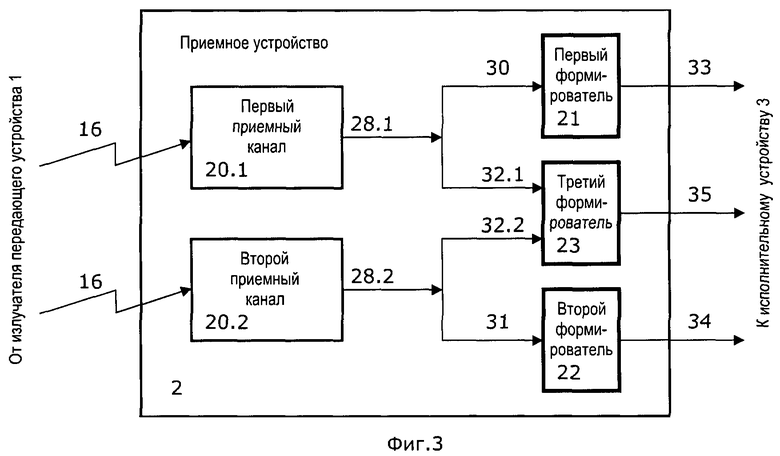
Фиг.3 - функциональная схема приемного устройства.
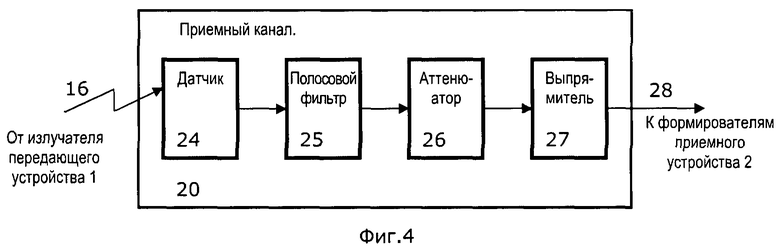
Фиг.4 - функциональная схема приемного канала.
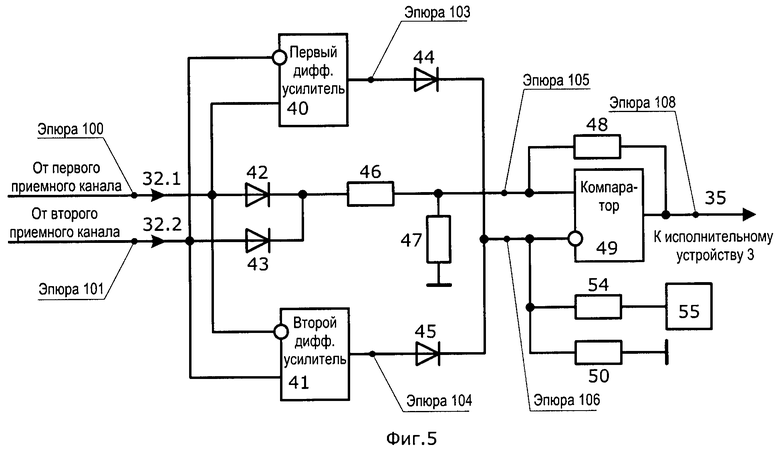
Фиг.5 - функциональная схема третьего формирователя сигналов.
Фиг.6 - функциональная схема системы управления перемещением УДТ.
Фиг.7 - диаграмма работы системы управления перемещением УДТ.
Система управления перемещением устройства диагностики трубопровода (УДТ) состоит из наружной части - передающего устройства 1 и внутритрубной части: приемного устройства 2 и исполнительного устройства 3. Внутритрубная часть представляет собой самоходную тележку 56 с размещенными на ней рентгеновской трубкой 57 и приемным устройством 2 (фиг.1, 6).
Исполнительное устройство 3 имеет устройство в соответствии с прототипом [3, 4], установлено на самоходной тележке 56, содержит схему управления, электродвигатель, редукторы и прочие элементы для осуществления процесса перемещения.
Передающее устройство 1 (фиг.2) имеет устройство в соответствии с прототипом [3, 4] и содержит излучатель 5, таймер 6, первый звуковой излучатель 7, второй звуковой излучатель 8, индикатор 9, пульт управления 18, аккумулятор 19. Пульт управления 18 содержит включатель 10 питания, кнопку «Старт» 11, кнопку «Стоп» 12, регулятор 13 мощности излучения. Пульт 18 управления соединен с генератором 4, при этом включатель 10 питания подключен к первому управляющему входу, кнопка «Старт» 11 подключена ко второму управляющему входу генератора 4, кнопка «Стоп» 12 подключена к третьему управляющему входу генератора 4, регулятор 13 мощности излучения подключен к четвертому управляющему входу генератора 4. К входу питания генератора 4 подключен аккумулятор 19, а к первому выходу генератора 4 подключен излучатель 5, излучающий в окружающую среду электромагнитное поле 16. Второй выход генератора 4 подключен к входу таймера 6, выход которого подключен к первому звуковому излучателю 7. Выход индикатора 9, на чувствительный вход которого поступает рентгеновское излучение 17 от рентгеновской трубки 57, расположенной на подвижной тележке 56 (Фиг.6), подключен к входу второго звукового излучателя 8.
В целях повышения радиационной безопасности передающее устройство 1 может дополнительно содержать пульт 14 дистанционного управления (ПДУ), соединенный по радиоканалу 14.1 с приемником 15 ПДУ, выход которого подключен к пятому управляющему входу генератора 4 (фиг.2).
Приемное устройство 2 (фиг.3, 6), предназначено для приема электромагнитных сигналов 16 излучаемых передающим устройством 1, обработки их и управления исполнительным устройством 3. Приемное устройство 2 расположено на подвижной тележке 56 и содержит приемные каналы 20: первый приемный канал 20.1 и второй приемный канал 20.2, а также первый формирователь 21, второй формирователь 22, третий формирователь 23. Приемные каналы 20.1 и 20.2 имеют одинаковое устройство (фиг.4). Каждый приемный канал 20 состоит из последовательно включенных датчика 24, полосового фильтра 25, аттенюатора 26 и выпрямителя 27. На датчик 24, являющийся чувствительным входом приемного канала 20, поступает электромагнитное излучение 16 от излучателя 5 передающего устройства 1. Выход выпрямителя 27 является выходом 28 приемного канала 20. В дальнейшем, первый приемный канал будем обозначать 20.1, а его элементы датчик 24.1, полосовой фильтр 25.1, аттенюатор 26.1 и выпрямитель 27.1. Аналогично, второй приемный канал 20.2, а его элементы датчик 24.2, полосовой фильтр 25.2, аттенюатор 26.2 и выпрямитель 27.2.
Выход 28.1 первого приемного канала 20.1 (фиг.3) подключен к входу 30 первого формирователя 21, выход которого является первым выходом 33 приемного устройства 2. Выход 28.2 второго приемного канала 20.2 подключен к входу 31 второго формирователя 22, выход которого является вторым выходом 34 приемного устройства 2. Первый вход 32.1 третьего формирователя 23 подключен к выходу 28.1 первого приемного канала 20.1, второй вход 32.2 подключен к выходу 28.2 второго приемного канала 20.2, а выход третьего формирователя 23 является третьим выходом 35 приемного устройства 2.
Выходы 33, 34, 35 приемного устройства, подключены к первому, второму и третьему входам исполнительного устройства 3.
Третий формирователь 23 может иметь следующее устройство (не ограничивающее и иные варианты исполнения).
В системе управления перемещением третий формирователь 23 (фиг.5) содержит первый дифференциальный усилитель 40, второй дифференциальный усилитель 41, первый, второй, третий и четвертый диоды, соответствующие позициям 42, 43, 44 и 45, первый, второй третий четвертый и пятый резисторы, соответствующие позициям 46, 47, 48, 50 и 54, компаратор 49 и источник 55 напряжения. Неинвертирующий вход первого дифференциального усилителя 40, являющийся первым входом 32.1 третьего формирователя 23, подключен к инвертирующему входу второго дифференциального усилителя 41 и к аноду первого диода 42. Инвертирующий вход первого дифференциального усилителя 40, являющийся вторым сигнальным входом 32.2 третьего формирователя 23, подключен к неинвертирующему входу второго дифференциального усилителя 41 и к аноду второго диода 43, катод которого подключен к катоду первого диода 42 и к первому выводу первого резистора 46, второй вывод которого подключен к первым выводам второго и третьего резисторов 47 и 48 соответственно и к неинвертирующему входу компаратора 49. Выход последнего, являющийся выходом 35 третьего формирователя 23, подключен ко второму выводу третьего резистора 48. При этом выход первого дифференциального усилителя 40 подключен к аноду третьего диода 44, а выход второго дифференциального усилителя 41 подключен к аноду четвертого диода 45. Причем катод третьего диода 44 подключен к катоду четвертого диода 45, к инвертирующему входу компаратора 49 и к первым выводам четвертого и пятого резисторов 50 и 54, вторые выводы которых подключены соответственно к нулевому потенциалу схемы и к источнику 55 напряжения, а нулевой потенциал схемы подключен ко второму выводу второго резистора 47.
Работа заявляемой системы.
Для проведения исследования качества сварного шва передающее устройство 1, являющееся внешней частью устройства диагностики трубопровода, работающего под управлением заявляемой системы, размещается обслуживающим персоналом в области исследуемого сварного шва 58 на поверхности трубопровода 59 (Фиг.6). Предварительно на исследуемом сварном шве фиксируется рентгеновская пленка 60, на которой в результате исследований будет сформировано изображение внутреннего строения шва. По этому изображению можно судить о его качестве. Изображение на рентгеновскую пленку 60 наносится благодаря действию излучения 17 рентгеновской трубки 57, располагаемой на внутритрубной части устройства диагностики трубопровода (Фиг.6).
Качество исследований в значительной мере определяется точностью расположения рентгеновской трубки 57 относительно исследуемого сварного шва 58. В идеале она должна быть расположена точно в его плоскости. Задачу точного позиционирования рентгеновской трубки решает заявляемая система управления перемещением устройства диагностики трубопровода. Происходит это следующим образом.
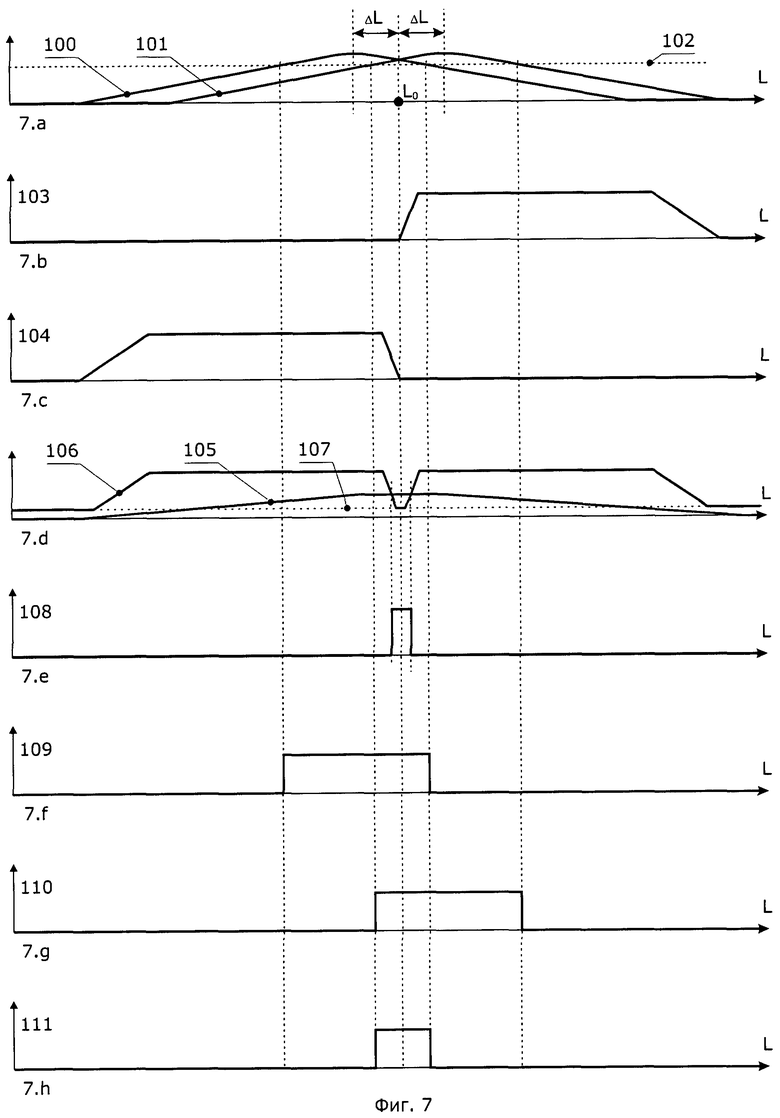
В начале проведения работ самоходная тележка 56, содержащая приемное устройство 2, располагается внутри трубопровода 59 в его начале, а внешняя часть устройства диагностики трубопровода, содержащая передающее устройство 1, располагается снаружи трубопровода 59 над подвижной тележкой 56. Включателем 10 питания оператор переводит передающее устройство 1 в режим ожидания. Далее кнопкой «Старт» 11 оператор запускает генератор 4, вырабатывающий мощный периодический электрический сигнал, например, частотой 29 Гц, поступающий на излучатель 5. Излучатель 5 излучает электромагнитные колебания 16. При этом источником энергии для работы генератора 4 и других блоков передающего устройства 1 является аккумулятор 19. Мощность излучаемых электромагнитных колебаний устанавливается оператором с помощью регулятора 13 мощности излучения в зависимости от толщины стенок трубопровода. Электромагнитные колебания 16 улавливаются датчиками 24 приемных каналов 20.1 и 20.2 приемного устройства 2, расположенного на самоходной тележке 56, и преобразовываются ими в электрический сигнал, который с их выходов поступает на полосовые фильтры 25 приемных каналов 20. Датчики 24 расположены на некотором расстоянии друг от друга (2ΔL) (Фиг.6) на линии L, направленной вдоль оси трубопровода 59. Уровень полезного сигнала (сигнала, принятого от излучателя 5) на выходе каждого датчика 24 зависит от расстояния между датчиком 24 и излучателем 5. Поэтому, если приемное устройство 2 находится на расстоянии от излучателя 5, превышающем ΔL, то уровни полезных сигналов на выходах датчиков 24 будут разными. Причем, если излучатель 5 находится впереди самоходной тележки 56, то уровень полезного сигнала на выходе датчика 24.1 первого канала 20.1 будет больше уровня полезного сигнала на выходе датчика 24.2 второго канала 20.2. Если же излучатель 5 находится позади самоходной тележки, то уровень полезного сигнала на выходе датчика 24.1 первого канала 20.1 будет меньше уровня полезного сигнала на выходе датчика 24.2 второго канала 20.2. Реальные сигналы на выходах датчиков 24.1 и 24.2 представляют собой сумму полезного сигнала и сигнала помехи. Для подавления сигнала помехи принятые сигналы поступают на полосовые фильтры 25. Датчики 24 имеют разную чувствительность. Для ее выравнивания сигналы с полосовых фильтров 25 поступают на аттенюаторы 26. С их помощью амплитуды полезных сигналов корректируются таким образом, чтобы при равенстве уровней электромагнитного излучения 16, поступающего на датчики 24, величина полезного сигнала на выходах аттенюаторов 26 была одинаковой. Далее сигналы поступают на выпрямители 27, где происходит их преобразование в постоянное напряжение. Зависимость величины постоянного напряжения на выходе выпрямителей 27 от положения приемного устройства 2 в трубопроводе 59 относительно положения излучателя 5 показана на фиг.7.а, где эпюры 100 и 101 отображают зависимости напряжений на выходах выпрямителей 27 первого 20.1 и второго 20.2 приемного канала соответственно. На фиг.7 осью абсцисс всех графиков является расстояние L вдоль оси трубопровода 59. Причем излучатель 5 находится в точке L0. С выходов выпрямителей 27, являющихся выходами приемных каналов 20.1 и 20.2, сигналы поступают на формирователи 21 и 22 соответственно, которые представляют собой пороговые элементы, формирующие на своих выходах уровни логической единицы при достижении определенного уровня (уровня срабатывания) напряжения на их входах. Зависимости сигналов на выходах формирователей 21 и 22 от положения приемного устройства 2 в трубопроводе 59 относительно излучателя 5 показаны на фиг.7.f, 7.g - эпюры 109 и 110 соответственно. При этом напряжения на их входах - эпюры 100 и 101 соответственно, а уровень срабатывания формирователей 21 и 22 показан горизонтальной пунктирной линией 102 (фиг.7.а). Сигналы с выходов формирователей 21 и 22 поступают в исполнительное устройство 3 для управления движением самоходной тележки. В прототипе соотношения этих сигналов и их изменения интерпретируются исполнительным устройством 3 как команды движения «Вперед», «Назад» и «Стоп». В частности, равенство обоих сигналов логической единице в прототипе воспринимается исполнительным устройством 3 как команда «Стоп». Участок, где выполняется это условие, показан на эпюре 111 (участок с высоким уровнем) (фиг.7.h). Данный участок имеет соответствующую протяженность. Это говорит о том, что самоходная тележка 56 остановится не точно в точке расположения излучателя 5 - точка L0, а в значительном удалении от нее, что является недостатком прототипа. Для его устранения в схему приемного устройства 2 заявляемой системы включен третий формирователь 23. Сигнал на его выходе показан на эпюре 108 (фиг.7.е). Он имеет значительно меньшую протяженность (участок с высоким уровнем), что позволяет остановить подвижную тележку 56 более точно.
После включения генератора 4 передающее устройство 1 вручную, оператором, плавно переносится к исследуемому шву и фиксируется на расстоянии Δ от него (Фиг.6). При этом изменение сигнала от излучателя 5, обработанного, как это описано выше, приемным устройством 2, воспринимается исполнительным устройством 3 как команда движения «Вперед». Самоходная тележка начинает движение вперед. При достижении точки расположения излучателя 5 (точка L0) самоходная тележка останавливается. При этом рентгеновская трубка 57 располагается в плоскости исследуемого сварного шва 57.
Третий формирователь 23 работает следующим образом. Входными сигналами для него являются постоянные напряжения, поступающие с выходов первого и второго приемных каналов 20.1 и 20.2, эпюры 100 и 101 соответственно (Фиг.7.а). Эти напряжения поступают на первый и второй дифференциальные усилители 40 и 41 соответственно и далее через диоды 44 и 45 на инвертирующий вход компаратора 49. Эти напряжения также через диоды 42 и 43 поступают на делитель напряжения на резисторах 46 и 47 и далее на неинвертирующий вход компаратора 49. На эпюрах 103 и 104 (фиг.7.b, 7.с) показаны зависимости положительных значений выходных напряжений на выходах дифференциальных усилителей 40 и 41. Отрицательные значения не показаны, как не представляющие интереса. На этих эпюрах горизонтальные участки с высоким уровнем, это участки, где дифференциальные усилители 40 и 41 выдают максимально возможное напряжение, т.е. находятся в режиме насыщения. На эпюре 106 (фиг.7.d) показана зависимость постоянного напряжения после диодов 44 и 45 на инвертирующем входе компаратора 49. Эпюра приподнята на величину смещения (линия 107), поступающего на вход компаратора 49 от источника 55 через делитель на резисторах 54 и 50. На эпюре 105 показана зависимость постоянного напряжения на неинвертирующем входе компаратора 49, который формирует уровень логической единицы на своем выходе в случае, когда напряжение на его неинвертирующем входе больше напряжения на его инвертирующем входе. В противном случае на его выходе формируется уровень логического нуля. Резистор 48 позволяет исключить дребезг, который может возникнуть благодаря наличию шумов, когда напряжения на обоих входах компаратора по величине близки друг к другу. Схема с таким резистором представляет собой триггер Шмидта и обладает гистерезисом. Ширина петли гистерезиса небольшая, поэтому на эпюрах ее действие не отражено.
Таким образом, за счет введения в схему приемного устройства системы управления перемещением устройства диагностики трубопровода третьего формирователя достигается улучшение ее эксплуатационных характеристик - повышение точности позиционирования рентгеновской трубки, что позволяет повысить качество исследований сварного шва.
Введение в состав передающего устройства пульта дистанционного управления позволяет оператору подавать команды управления излучением рентгеновской трубки, находясь на безопасном расстоянии от источника рентгеновского излучения, что позволяет повысить уровень радиационной безопасности системы.
Источники информации
1. Патент РФ №2123683 СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА КОЛЬЦЕВЫХ СВАРНЫХ ШВОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (Опубл. 20.12.1998. Прекратил действие).
2. Устройство «Кроулер» производства фирмы Solus Schall (Англия). Описание. 2004 г. Приложение 1. Структурная схема «Кроулера».
3. Рентгенографические кроулеры JME 24. http://www.tkc-ntd.ru (Приложение 2) - наиболее близкий аналог.
4. JME Pipeline X-Ray Crawlers, проспект фирмы JME LTD, Англия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2006 |
|
RU2318203C1 |
| КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА | 2010 |
|
RU2446477C2 |
| РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ АНАЛИЗАТОР КОМПОНЕНТНОГО СОСТАВА И СКОРОСТНЫХ ПАРАМЕТРОВ ГАЗОЖИДКОСТНОГО ПОТОКА | 2008 |
|
RU2379663C1 |
| РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ АНАЛИЗАТОР СОСТАВА И СКОРОСТИ ТРЕХКОМПОНЕНТНОГО ПОТОКА | 2008 |
|
RU2379658C1 |
| РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ АНАЛИЗАТОР КОМПОНЕНТНОГО СОСТАВА И СКОРОСТИ ГАЗОЖИДКОСТНОГО ПОТОКА | 2008 |
|
RU2379659C1 |
| Система передачи дискретной информации | 1987 |
|
SU1467779A1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2332699C1 |
| РЕНТГЕНОФЛУОРЕСЦЕНТНЫЙ АНАЛИЗАТОР КОМПОНЕНТНОГО СОСТАВА И СКОРОСТИ ГАЗОЖИДКОСТНОГО ПОТОКА НЕФТЯНЫХ СКВАЖИН | 2008 |
|
RU2379665C1 |
| МУЛЬТИСЕНСОРНЫЙ АНАЛИЗАТОР ПОКОМПОНЕНТНОГО РАСХОДА ТРЕХКОМПОНЕНТНОГО ГАЗОЖИДКОСТНОГО ПОТОКА НЕФТЯНЫХ СКВАЖИН | 2009 |
|
RU2399879C1 |
| Формирователь высоковольтных импульсов специальной формы | 1989 |
|
SU1758852A1 |

Использование: для ультразвукового контроля изделий акустическими поверхностными волнами. Сущность: заключается в том, что система управления перемещением устройства диагностики трубопровода (УДТ) состоит из передающего устройства, содержащего излучатель низкочастотного электромагнитного сигнала, и внутритрубной части, представляющей собой самоходную тележку с размещенными на ней рентгеновской трубкой и приемным устройством, предназначенным для приема сигналов передающего устройства, обработки их и управления исполнительным устройством, исполнительного устройства, содержащего двигатель тележки, при этом приемное устройство содержит приемные каналы, преобразующие электромагнитный сигнал, генерируемый передающим устройством, в электрические сигналы управления исполнительного устройства, причем приемные каналы подключены к формирователям сигналов, выходы которых являются первым и вторым выходами приемного устройства, подключенных к первому и второму входам исполнительного устройства соответственно, при этом приемное устройство дополнительно содержит третий формирователь, первый и второй входы которого подключены к выходам первого и второго приемных каналов соответственно, а выход, являющийся третьим выходом приемного устройства, к третьему входу исполнительного устройства. Технический результат: улучшение эксплуатационных характеристик системы управления перемещением устройства диагностики трубопровода за счет повышения точности позиционирования устройства. 3 з.п. ф-лы, 7 ил.
1. Система управления перемещением устройства диагностики трубопровода (УДТ), состоящая из передающего устройства, содержащего излучатель низкочастотного электромагнитного сигнала, и внутритрубной части, представляющей собой самоходную тележку с размещенными на ней рентгеновской трубкой и приемным устройством, предназначенным для приема сигналов передающего устройства, обработки их и управления исполнительным устройством, исполнительного устройства, содержащего двигатель тележки, при этом приемное устройство содержит приемные каналы, преобразующие электромагнитный сигнал, генерируемый передающим устройством, в электрические сигналы управления исполнительного устройства, причем приемные каналы подключены к формирователям сигналов, выходы которых являются первым и вторым выходами приемного устройства, подключенных к первому и второму входам исполнительного устройства соответственно, отличающаяся тем, что приемное устройство дополнительно содержит третий формирователь, первый и второй входы которого подключены к выходам первого и второго приемных каналов соответственно, а выход, являющийся третьим выходом приемного устройства, к третьему входу исполнительного устройства.
2. Система управления перемещением устройства диагностики трубопровода по п.1, отличающаяся тем, что каждый приемный канал содержит последовательно соединенные датчик, полосовой фильтр, аттенюатор, выпрямитель, причем выход выпрямителя является выходом приемного канала.
3. Система управления перемещением устройства диагностики трубопровода по п.1, отличающаяся тем, что третий формирователь содержит первый и второй дифференциальные усилители, первый, второй, третий и четвертый диоды, первый, второй, третий и четвертый резисторы и компаратор, причем неинвертирующий вход первого дифференциального усилителя, являющийся первым сигнальным входом третьего формирователя, подключен к инвертирующему входу второго дифференциального усилителя и к аноду первого диода, а инвертирующий вход первого дифференциального усилителя, являющийся вторым сигнальным входом третьего формирователя, подключен к неинвертирующему входу второго дифференциального усилителя и к аноду второго диода, катод которого подключен к катоду первого диода и к первому выводу первого резистора, второй вывод которого подключен к первым выводам второго и третьего резисторов и к неинвертирующему входу компаратора, выход которого, являющийся выходом третьего формирователя, подключен ко второму выводу третьего резистора, причем выходы первого и второго дифференциальных усилителей подключены к анодам соответственно третьего и четвертого диодов, катоды которых подключены друг к другу, а также подключены к инвертирующему входу компаратора и к первым выводам четвертого и пятого резисторов, второй вывод которых подключен соответственно к общему проводу и к источнику напряжения, причем общий провод подключен ко второму выводу второго резистора.
4. Система управления перемещением устройства диагностики трубопровода по п.1, отличающаяся тем, что передающее устройство дополнительно содержит пульт дистанционного управления (ПДУ), соединенный по радиоканалу с приемником ПДУ, выход которого подключен к управляющему входу генератора.
| ВНУТРИТРУБНЫЙ КРОТ ДЛЯ КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ ТОРЦЕВЫХ СОЕДИНЕНИЙ | 2005 |
|
RU2285252C1 |
| Способ рентгенорадиометрического или гамма-гамма-опробования руд и устройство для его осуществления | 1988 |
|
SU1673936A1 |
| Устройство для гамма-абсорбционного опробования руды | 1992 |
|
SU1806395A3 |
| Способ рентгенорадиометрического опробывания руды | 1990 |
|
SU1755145A1 |
| US 4224517 A, 23.09.1980 | |||
| US 6002734 A, 14.12.1999. | |||

