По настоящей заявке испрашивается приоритет по дате подачи предварительной заявки на выдачу патента США под № 61/031368, поданной 26 февраля 2008 года, предварительной заявки на выдачу патента США под № 61/038040, поданной 19 марта 2008 года, предварительной заявки на выдачу патента США под № 61/038,057, поданной 20 марта 2008 года, и заявки на выдачу патента Кореи под № 10-2008-0057271, поданной 18 июня 2008 года, все из которых включены в материалы настоящей заявки посредством ссылки во всей своей полноте.
Область техники, к которой относится изобретение
Настоящее изобретение относится к беспроводной связи, а более точно к способу размещения существенной управляющей информации в кадре с поддержкой разнородных систем.
Уровень техники
Стандарт 802.16 института инженеров по электротехнике и электронике (IEEE) предусматривает методику и протокол для поддержки широкополосного беспроводного доступа. Стандартизация была проведена начиная с 1999 года до тех пор, пока IEEE 802.16-2001 не был принят в 2001 году. IEEE 802.16-2001 основан на физическом уровне одиночной несущей (SC), названной 'WirelessMAN-SC'. Стандарт IEEE 802.16a был принят в 2003 году. В стандарте IEEE 802.16a, 'WirelessMAN-OFDM' и 'WirelessMAN-OFDMA', кроме того, добавлены на физический уровень в дополнение к 'WirelessMAN-SC'. После расширения стандарта IEEE 802.16a, исправленный стандарт IEEE 802.16-20 был принят в 2004 году. Для исправления недостатков и ошибок стандарта IEEE 802.16-2004, IEEE 802.16-2004/Corl (в дальнейшем, IEEE 802.16e) был завершен в 2005 году в формате 'исправленной опечатки'.
Связь между базовой станцией (BS) и пользовательским оборудованием (UE) включает в себя передачу нисходящей линии связи (DL) с BS на UE и передачу восходящей линии связи (UL) с UE на BS. Профиль системы, основанный на существующем IEEE 802.16e, поддерживает схему дуплекса с временным разделением каналов (TDD), в которой передача DL и передача UL разделены во временной области. В схеме TDD передача UL и передача DL выполняются в разных промежутках времени посредством использования одной и той же полосы частот. Схема TDD обладает преимуществом по той причине, что частотно-селективное планирование выполняется просто, поскольку характеристика канала UL и характеристика канала DL являются взаимообратными.
В настоящее время есть продолжающаяся деятельность по стандартизации для стандарта IEEE 802.16m, который является новым техническим стандартом, основанным на IEEE 802.16e. Система IEEE 802.16e принимает во внимание не только схему дуплекса с частотным разделением каналов (FDD), но также схему полудуплексного FDD (H-FDD). В схеме FDD передача DL и передача UL выполняются одновременно посредством использования разных полос частот. В схеме H-FDD передача DL и передача UL выполняются в разные промежутки времени посредством использования разных полос частот. То есть схема H-FDD не выполняет передачу DL и передачу UL одновременно, радиоресурсы DL и радиоресурсы UL не выделяются на UE с использованием схемы H-FDD в одной и той же временной области.
Должна быть спроектирована эволюционная система, развитая из унаследованной системы, чтобы действовала посредством заключения в себе унаследованной системы, что указывается ссылкой как обратная совместимость. Чтобы удовлетворять обратной совместимости, эволюционная система должна быть способна поддерживать не только схему TDD, но также и схему FDD, схему H-FDD и т.д. Так как поддерживаются различные схемы передачи, существенной управляющей информации необходимо выдаваться для каждой из унаследованной системы и эволюционной системы. Существенная управляющая информация является управляющей информацией, которая должна приобретаться всеми UE, использующими систему. Примеры существенной управляющей информации включают в себя системную информацию, которая должна широковещательно передаваться, информацию о синхронизации и т.д. Существенная управляющая информация для эволюционной системы предпочтительно предоставляется без оказания влияния на существенную управляющую информацию унаследованной системы.
Однако, до сих пор не предусмотрено, как размещать существенную управляющую информацию в эволюционной системе, удовлетворяющей обратной совместимости с унаследованной системой.
Сущность изобретения
Настоящее изобретение предлагает способ размещения существенной управляющей информации в кадре, поддерживающем разнородные системы.
Согласно аспекту настоящего изобретения предложен способ размещения управляющей информации в системе беспроводной связи. Способ включает в себя: размещение существенной управляющей информации первой системы в первый подкадр в кадре, включающем в себя множество подкадров, каждый из которых содержит множество символов мультиплексирования с ортогональным частотным разделением каналов (OFDM); и размещение существенной управляющей информации второй системы в nый подкадр в фиксированном положении от первого подкадра (где n - целое число, удовлетворяющее n>1).
Согласно аспекту настоящего изобретения предложен способ размещения управляющей информации в системе беспроводной связи. Способ включает в себя: размещение по меньшей мере одного подкадра для первой системы в кадре нисходящей линии связи, включающем в себя множество подкадров; размещение по меньшей мере одного подкадра, смежного во временной области, для второй системы в подкадр для первой системы; размещение существенной управляющей информации первой системы в подкадр для первой системы; и размещение существенной управляющей информации второй системы в подкадр для второй системы.
Краткое описание чертежей
Фиг.1 показывает систему беспроводной связи.
Фиг.2 показывает пример структуры кадра.
Фиг.3 показывает пример кадра, включающего в себя множество перестановок.
Фиг.4 показывает пример кадра, поддерживающего разнородные системы.
Фиг.5 показывает еще один пример кадра, поддерживающего разнородные системы.
Фиг.6 показывает еще один пример кадра, поддерживающего разнородные системы.
Фиг.7 показывает еще один пример кадра, поддерживающего разнородные системы.
Фиг.8 показывает еще один пример кадра, поддерживающего разнородные системы.
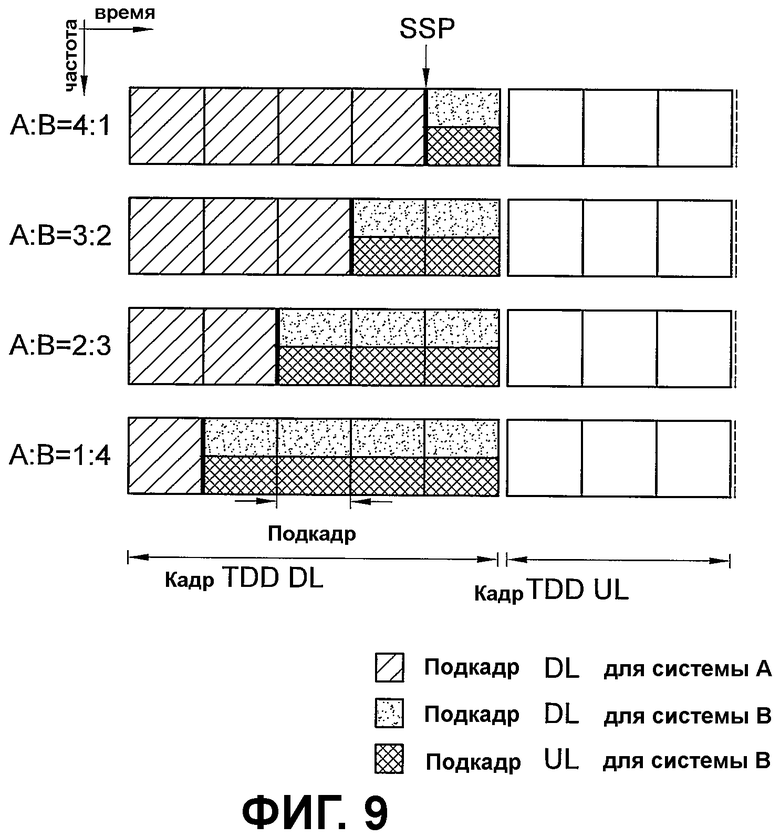
Фиг.9 показывает еще один пример кадра, поддерживающего разнородные системы.
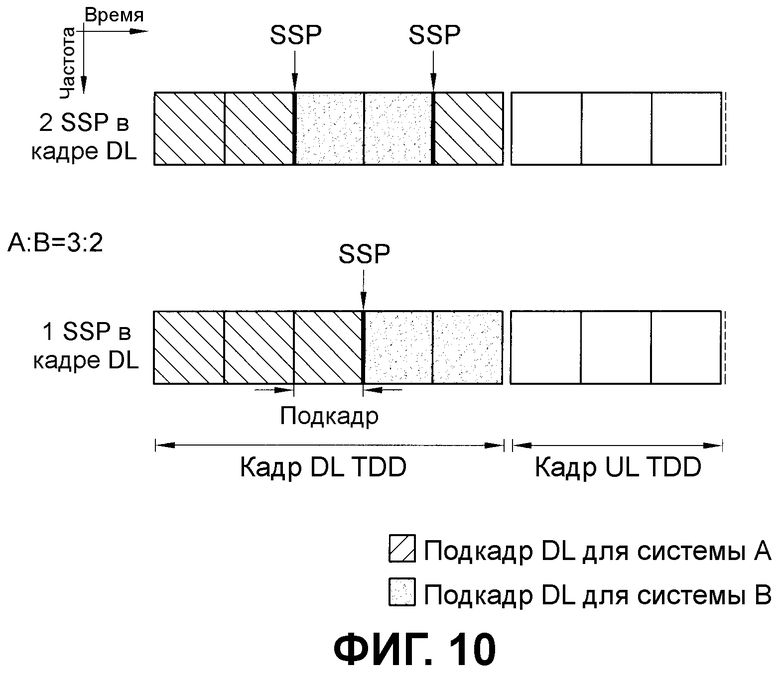
Фиг.10 показывает еще один пример кадра, поддерживающего разнородные системы.
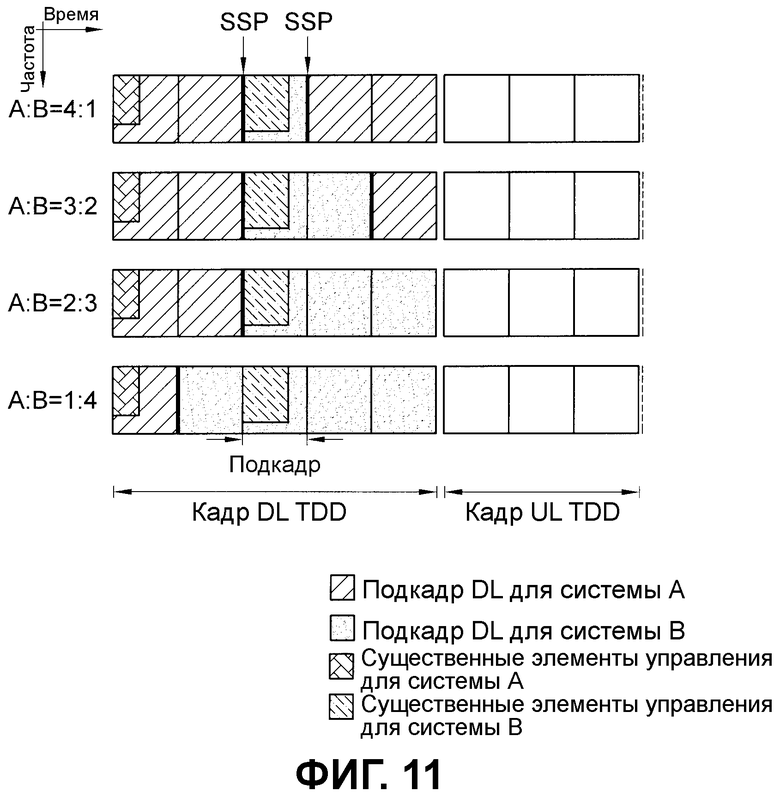
Фиг.11 показывает пример управляющей информации в кадре, поддерживающем разнородные системы.
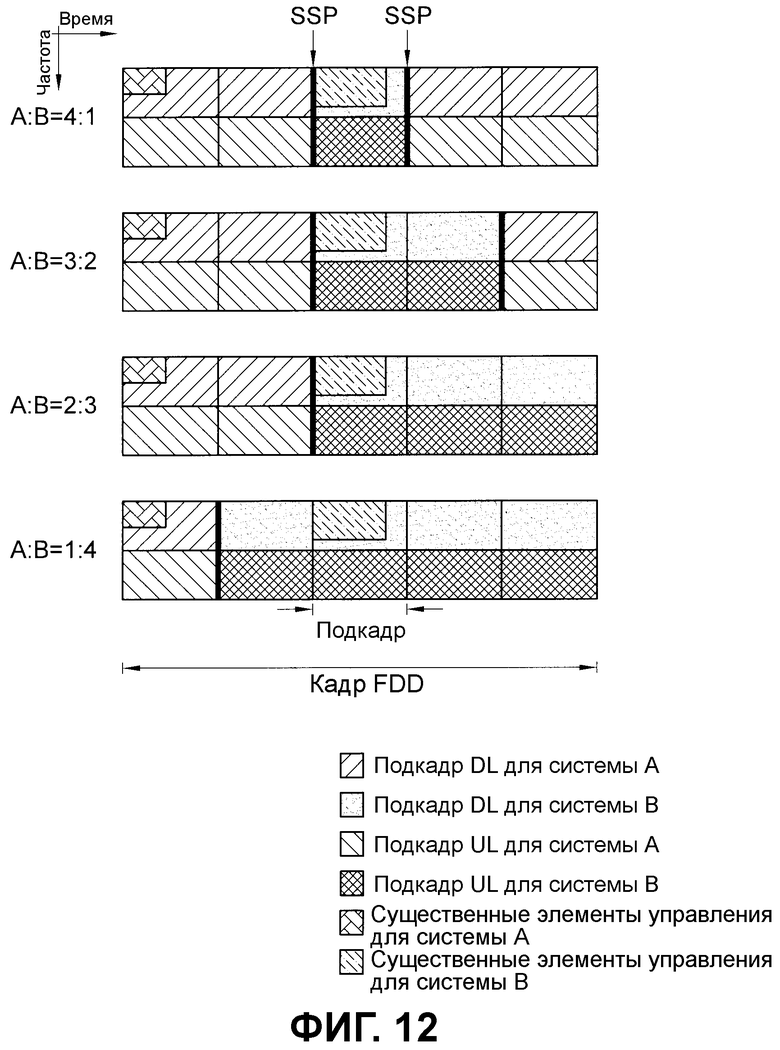
Фиг.12 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
Фиг.13 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
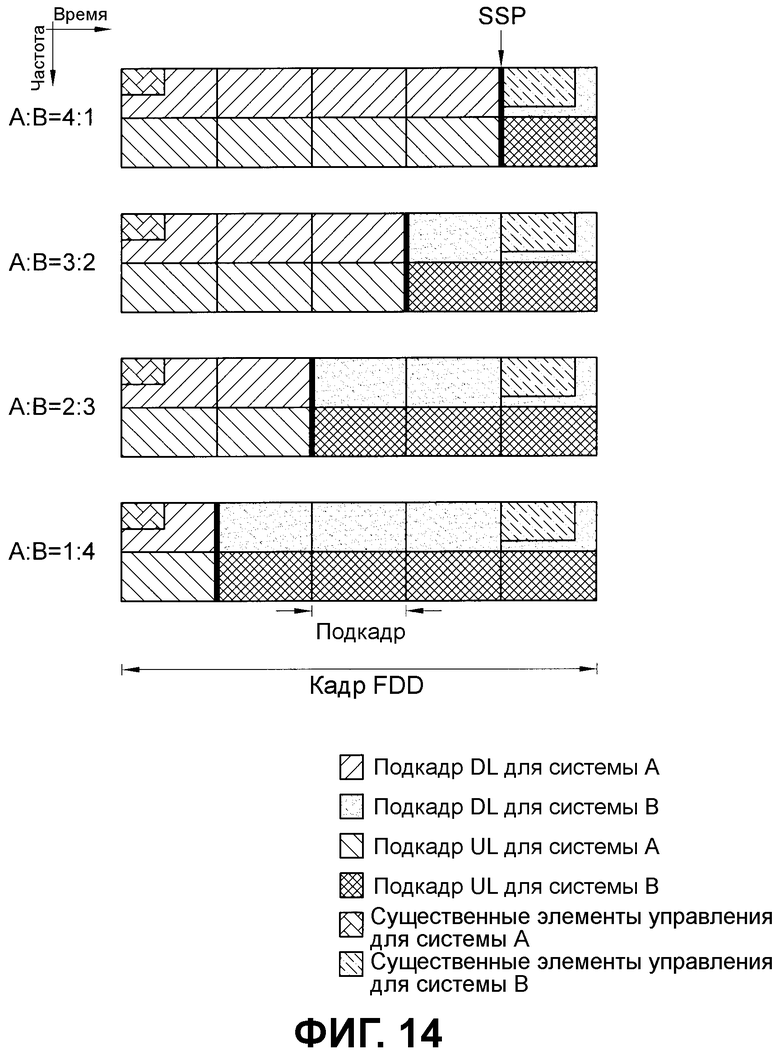
Фиг.14 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
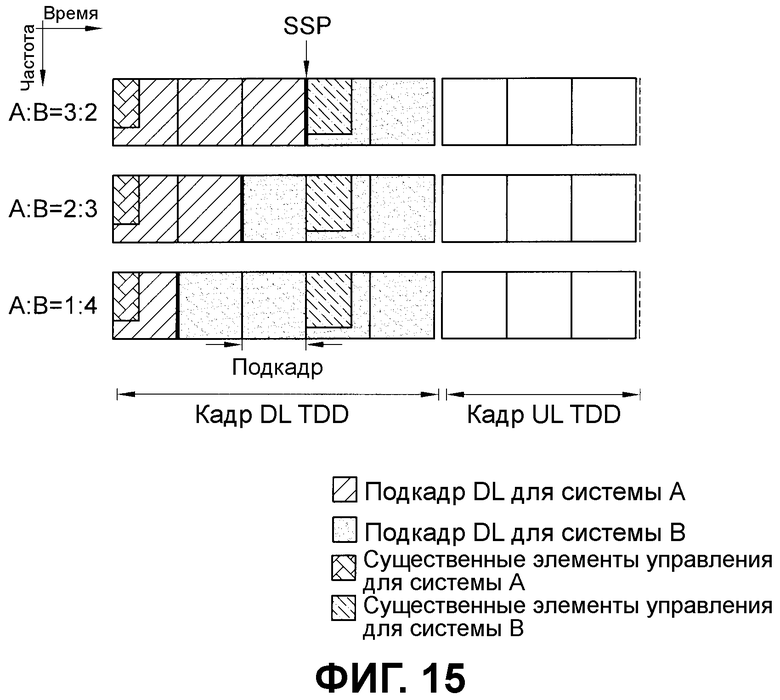
Фиг.15 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
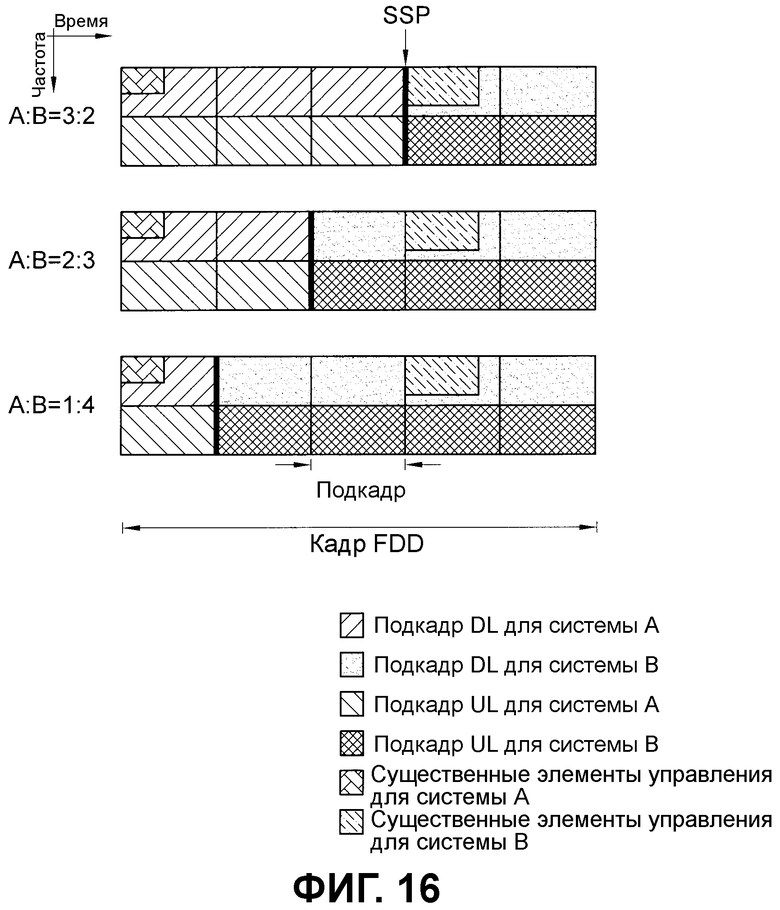
Фиг.16 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
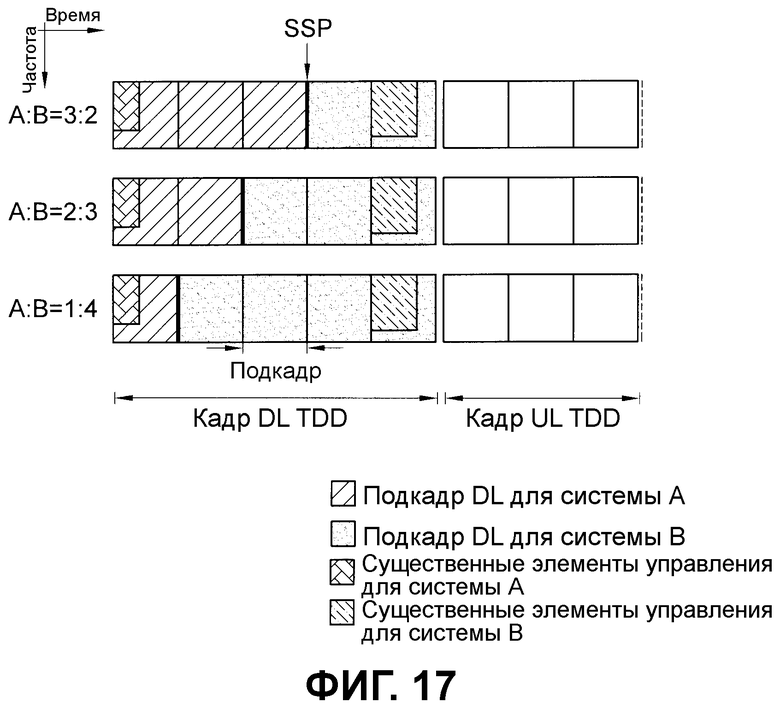
Фиг.17 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
Фиг.18 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
Фиг.19 показывает пример управляющей информации в кадре дуплекса с частотным разделением каналов (FDD).
Фиг.20 показывает пример управляющей информации в кадре полудуплексного FDD (H-FDD).
Фиг.21 показывает пример управляющей информации в кадре, основанном на комплементарной группировке и планировании (CGS) H-FDD.
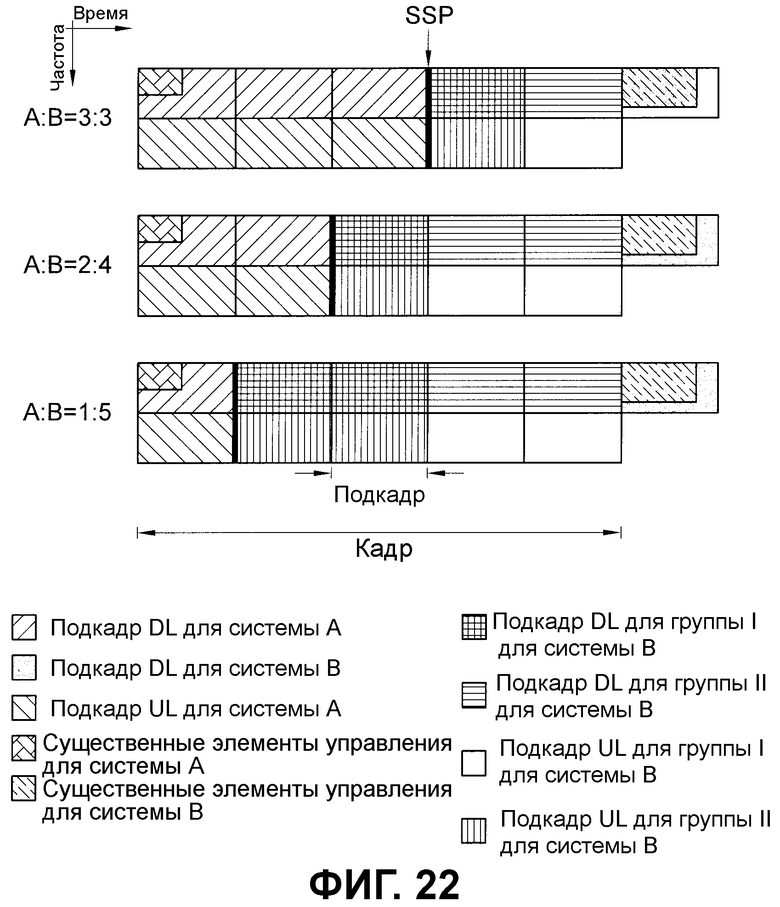
Фиг.22 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
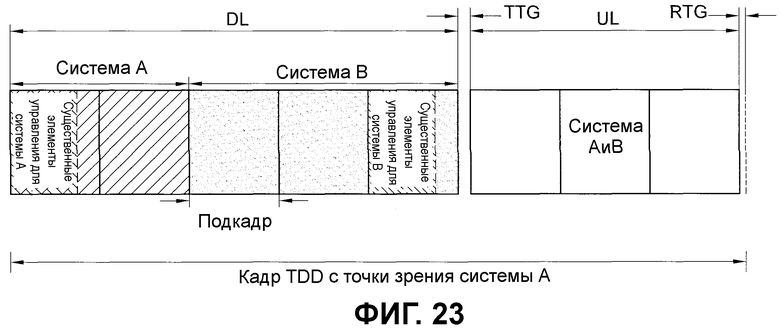
Фиг.23 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
Фиг.24 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
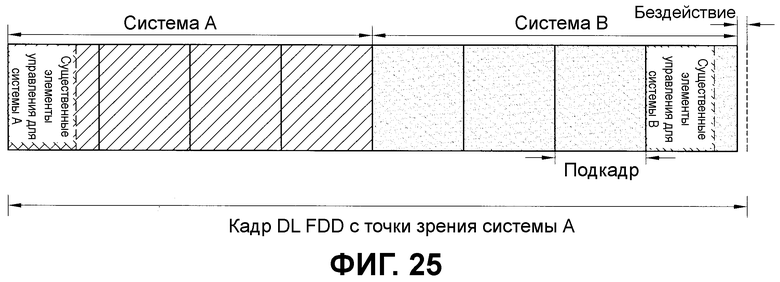
Фиг.25 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
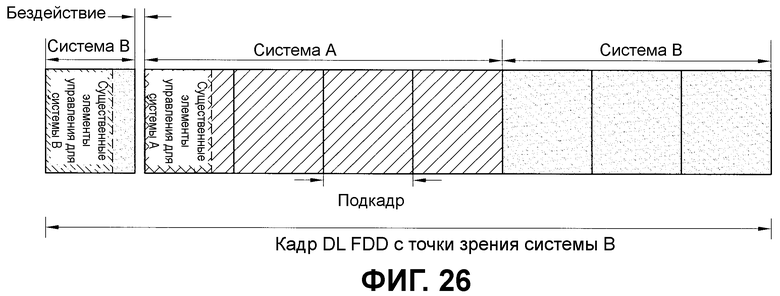
Фиг.26 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
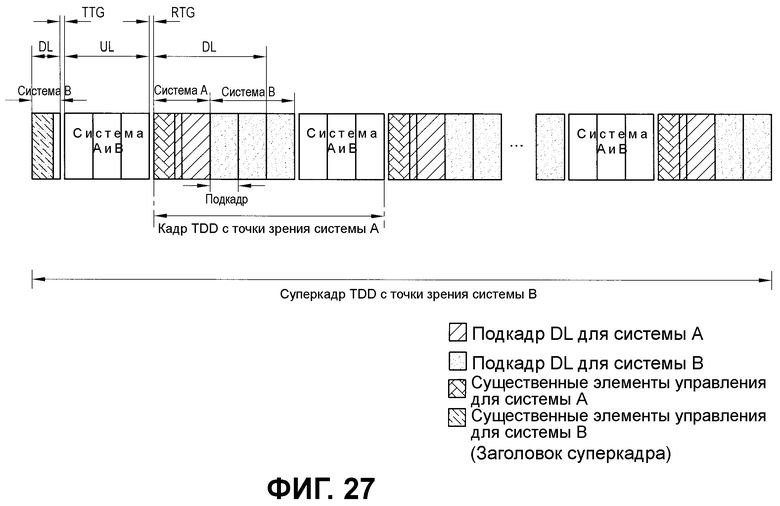
Фиг.27 показывает пример суперкадра, поддерживающего разнородные системы.
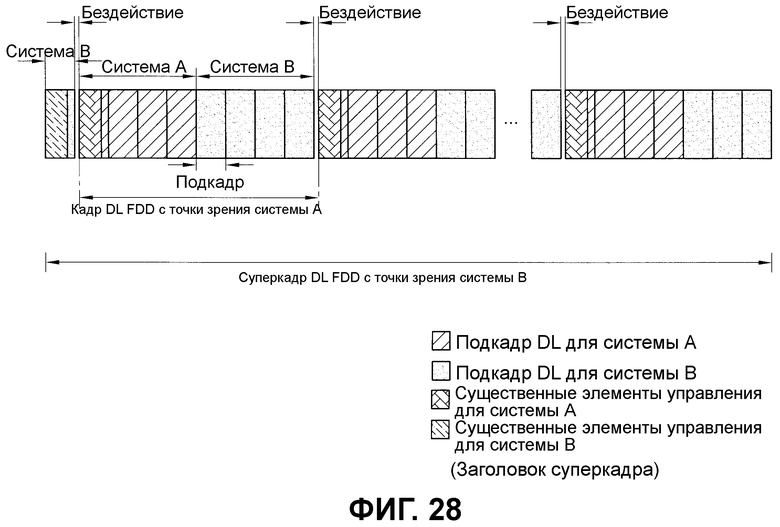
Фиг.28 показывает еще один пример суперкадра, поддерживающего разнородные системы.
Описание примерных вариантов осуществления
Фиг.1 показывает систему беспроводной связи. Система беспроводной связи может широко применяться для предоставления многообразия услуг связи, таких как речевые, пакетные данные и т.д.
Со ссылкой на фиг.1, система беспроводной связи включает в себя, по меньшей мере, одно пользовательское оборудование 10 (UE) и базовую станцию 20 (BS). UE 10 может быть стационарным или мобильным и может указываться ссылкой в качестве другой терминологии, такой как мобильная станция (MS), пользовательский терминал (UT), абонентская станция (SS), беспроводное устройство и т.д. BS 20 обычно является стационарной станцией, которая поддерживает связь с UE 10 и может указываться ссылкой в качестве другой терминологии, такой как Узел Б, базовая приемопередающая система (BTS), точка доступа и т.д. Может быть одна или более сот в пределах покрытия BS 20.
Нисходящая линия связи (DL) представляет линию связи с BS 20 на UE 10, а восходящая линия связи (UL) представляет линию связи с UE 10 на BS 20. В DL передатчик может быть частью BS 20, а приемник может быть частью UE 10. В UL передатчик может быть частью UE 10, а приемник может быть частью BS 20.
Нет ограничения по схеме множественного доступа, используемого в системе беспроводной связи. Примеры схемы множественного доступа являются различными, такими как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), FDMA на одиночной несущей (SC-FDMA) и множественный доступ с ортогональным частотным разделением каналов (OFDMA).
BS 20 имеет, по меньшей мере, одну соту. Сота находится в зоне, в которой BS 20 предоставляет услуги связи. Разные схемы связи могут использоваться в одной соте. То есть разнородные системы беспроводной связи могут существовать наряду с совместным использованием зоны услуг связи. В дальнейшем, в документе, разнородные системы беспроводной связи или разнородные системы указывают ссылкой на системы, использующие разные схемы связи. Например, разнородные системы могут быть системами, использующими разные схемы доступа, или могут быть унаследованными системами и эволюционными системами, поддерживающими обратную совместимость с унаследованной системой.
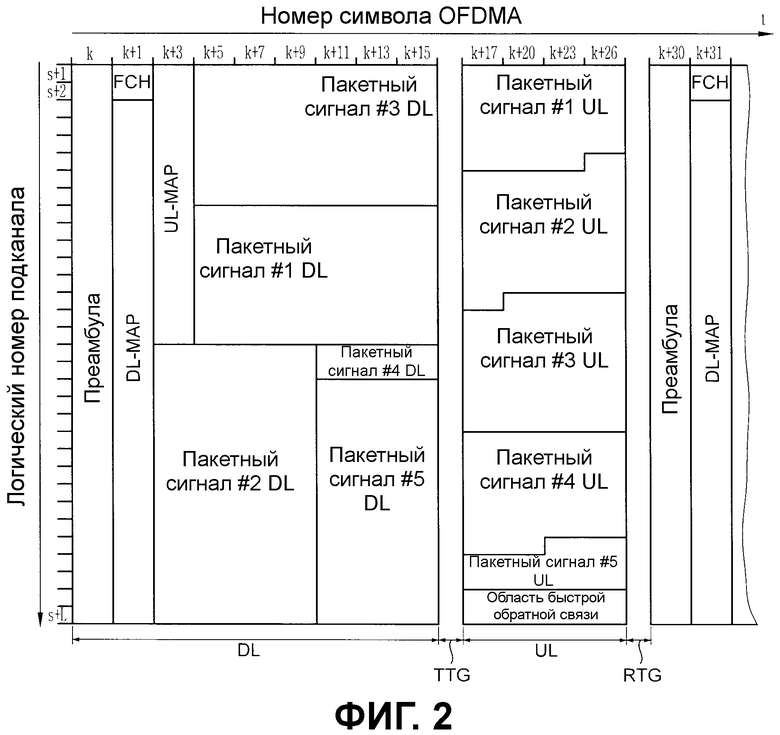
Фиг.2 показывает пример структуры кадра. Кадр является последовательностью данных, используемой согласно физическим техническим условиям в течение фиксированной длительности времени. Это логический кадр, и раздел 8.4.4.2 стандарта 802.16-2004 IEEE, «Part 16: Air Interface for Fixed Broadband Wireless Access Systems» («Часть 16: Эфирный интерфейс для стационарных систем широкополосного беспроводного доступа») может быть включен в материалы настоящей заявки посредством ссылки.
Со ссылкой на фиг.2, кадр включает в себя кадр нисходящей линии связи (DL) и кадр восходящей линии связи (UL). Передача DL выполняется через кадр DL, а передача UL выполняется через кадр UL. В схеме дуплекса с временным разделением каналов (TDD) передачи UL и DL выполняются в разные промежутки времени, но совместно используют одну и ту же полосу частот. Кадр DL предшествует кадру UL по времени. Кадр DL включает в себя преамбулу, заголовок управления кадром (FCH), DL-MAP, UL-MAP и область пакетного сигнала в таком порядке. Защитные промежутки времени предусмотрены для идентификации кадра UL и кадра DL и вставлены в среднюю часть (между кадром DL и кадром UL) и заключительную часть (следующую за кадром UL) кадра. Пауза переключения передачи/приема (TTG) является паузой между пакетным сигналом DL и следующим пакетным сигналом UL. Пауза переключения приема/передачи (RTG) является паузой между пакетным сигналом UL и следующим пакетным сигналом DL.
Преамбула используется между BS и UE для начальной синхронизации, поиска соты, а также оценки ухода частоты и канала. FCH включает в себя информацию о длине сообщения DL-MAP и схеме кодирования DL-MAP.
DL-MAP является областью для передачи сообщения DL-MAP. Сообщение DL-MAP определяет доступ к каналу DL. Сообщение DL-MAP включает в себя подсчет изменений конфигурации дескриптора канала нисходящей линии связи (DCD) и идентификатор (ID) BS. DCD описывает профиль пакетного сигнала DL, применяемый к текущему MAP (протоколу части мобильных приложений). Профиль пакетного сигнала DL указывает характеристики физического канала DL. DCD периодически передается с BS посредством использования сообщения DCD.
UL-MAP является областью для передачи сообщения UL-MAP. Сообщение UL-MAP определяет доступ к каналу UL. Сообщение UL-MAP включает в себя подсчет изменений конфигурации дескриптора канала восходящей линии связи (UCD) и также включает в себя действующий начальный момент времени размещения восходящей линии связи, определенного согласно UL-MAP. UCD описывает профиль пакетного сигнала восходящей линии связи. Профиль пакетного сигнала восходящей линии связи указывает характеристики физического канала UL и периодически передается с BS посредством использования сообщения UCD.
В дальнейшем, интервал является минимально возможной единицей размещения данных и определен промежутком времени и подканалом. Количество подканалов зависит от размерности БПФ (FFT, быстрого преобразования Фурье) и частотно-временного отображения. Подканал включает в себя множество поднесущих, и количество поднесущих на канал отличается в зависимости от правила перестановки. Перестановка является отображением логического подканала в физический подканал. При полном использовании подканалов (FUSC) подканал включает в себя 48 поднесущих. При частичном использовании подканалов (PUSC) подканал включает в себя 24 или 16 поднесущих. Сегмент является по меньшей мере одной группой подканалов.
Отображение данных в физическую поднесущую на физическом уровне, вообще, выполняется в два этапа. На первом этапе данные отображаются в, по меньшей мере, один интервал данных в по меньшей мере одном логическом подканале. На втором этапе каждый логический подканал отображается в физическую поднесущую. Это называется перестановкой. Правило перестановки, такое как FUSC, PUSC, необязательное FUSC (O-FUSC), необязательное PUSC (O-PUSC), адаптивные модуляция и кодирование (AMC) и т.д., раскрыто в Документе 1. Группа символов мультиплексирования с ортогональным частотным разделением каналов (OFDM), использующая одно и то же правило перестановки, указывается ссылкой как зона перестановки. Один кадр включает в себя, по меньшей мере, одну зону перестановки.
FUSC и O-FUSC используются только в передаче DL. FUSC состоит из одного сегмента, включающего в себя все группы подканалов. Каждый подканал отображается в физическую поднесущую, распределенную по физическому каналу, взятому в целом. Это отображение изменяется в каждом символе OFDM. Интервал состоит из одного подканала в одном символе OFDM. Контрольные сигналы размещаются посредством использования разных схем в O-FUSC и FUSC.
PUSC используется как в передаче DL, так и передаче UL. В DL каждый физический канал поделен на кластер, состоящий из 14 смежных поднесущих в 2 символах OFDM. Отображаются 6 групп физических каналов. В каждой группе контрольный сигнал размещен в фиксированном положении для каждого кластера. В UL поднесущие поделены на мозаичные фрагменты, состоящие из четырех смежных физических поднесущих в 3 символах OFDM. Подканал включает в себя 6 мозаичных фрагментов. Контрольный сигнал размещен в углу каждого мозаичного фрагмента. O-PUSC используется только для передачи UL, и мозаичный фрагмент состоит из 3 смежных физических поднесущих в 3 символах OFDM. Контрольный сигнал размещен в центре мозаичного фрагмента. Контрольный сигнал также может указываться ссылкой как опорный сигнал.
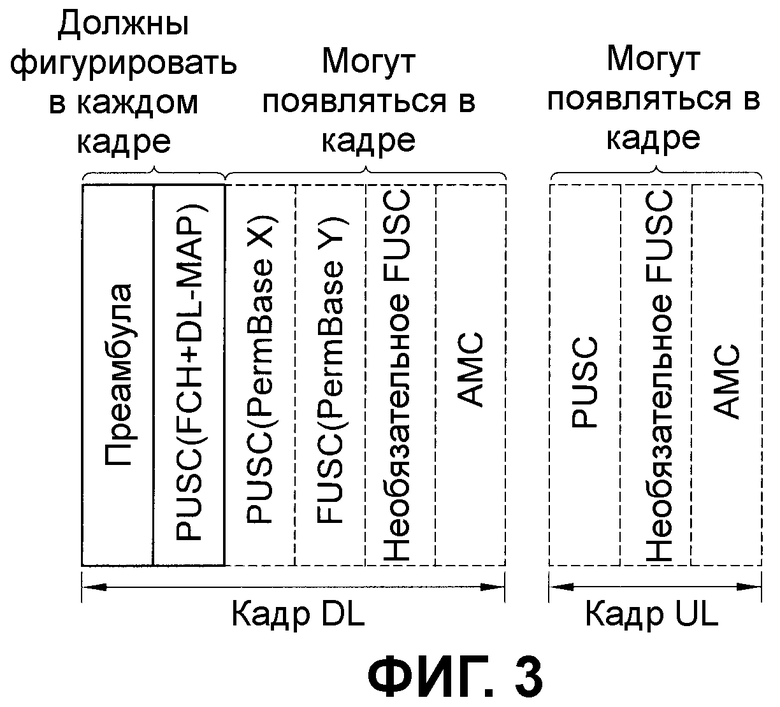
Фиг.3 показывает пример кадра, включающего в себя множество перестановок. Кадр является физическим кадром. Раздел 8.4.4.2 стандарта 802.16-2004 IEEE может быть включен в материалы настоящей заявки посредством ссылки.
Со ссылкой на фиг.3, преамбула, FCH и DL-MAP кадра DL должны фигурировать в каждом кадре. FCH и DL-MAP используют перестановку PUSC. В кадре DL могут появляться перестановки PUSC, FUSC, избирательного PUSC и AMC. Перестановка, которая появляется в кадре DL, может быть определена в DL-MAP. Перестановки PUSC, избирательного PUSC, AMC могут появляться в кадре UL. Перестановка, которая появляется в кадре UL, может быть определена в UL-MAP.
В логической структуре кадра правило перестановки может выбираться, принимая во внимание выигрыш от частотного разнесения, выигрыш от планирования, служебные данные контрольного сигнала, применимость многих антенн, применимости адаптивных антенн и т.д. Область, в которой используется одно и то же правило перестановки, указывается ссылкой как зона перестановки. Множество зон перестановки разделены во временной области. Переключение зоны перестановки определяется в DL-MAP или UL-MAP. Тип перестановки, используемой в кадре UL и кадре DL, не ограничен, и, таким образом, может меняться по-разному.
Таблица 1 показывает примерные параметры для кадра.
Преамбула, FCH, DL-MAP или тому подобное у каждого кадра может использоваться для правильного получения данных или управляющей информации в кадре. Преамбула, FCH и DL-MAP могут рассматриваться в качестве существенной управляющей информации, требуемой UE для выполнения связи посредством доступа к сети системы. Кадр может иметь размер 5 мс. Существенная управляющая информация размещается первой по времени в кадре.
В дальнейшем, будет описан кадр, поддерживающий разнородные системы.
Предложенный кадр предназначен для случая, где разнородные системы совместно используют полосу частот, и не ограничен типом или определением разнородных систем.
Разнородные системы могут быть двумя или более системами беспроводной связи. Для удобства пояснения предполагается, что две системы беспроводной связи мультиплексируются в качестве разнородной системы, и любая одна из двух систем определена как система A, другая система определена как система B. Система A может быть унаследованной системой, а система B может быть эволюционной системой, поддерживающей обратную совместимость с системой A. Например, система A может подразумевать систему беспроводной связи, использующую технологию стандарта IEEE 802.16e, а система B может подразумевать систему беспроводной связи, использующую технологию стандарта IEEE 802.16m. Предполагается, что система A и система B совместно используют полосу частот, будучи мультиплексируемыми с использованием схемы мультиплексирования с временным разделением каналов (TDM). Схема TDM использует радиоресурс, деля его во временной области в одной и той же полосе частот.
В дополнение, предполагается, что радиоресурс выделяется в единицах подкадров, включающих в себя множество символов OFDM в кадре, поддерживающем разнородные системы. Подкадр является минимальной единицей составления кадра и может быть определен в качестве множества символов OFDM. Подкадр может быть единицей деления кадра DL и кадра UL посредством использования схемы TDD, в которой кадр DL и кадр UL разделены по времени. Подкадр может быть единицей деления области ресурсов для системы A и области ресурсов для системы B в кадре. Когда выделение и планирование радиоресурсов выполняются в единицах подкадра, есть преимущество по той причине, что задержка передачи может уменьшаться при повторной передаче данных гибридного автоматического запроса на повторную передачу (HARQ).
В системе A и системе B передача UL и передача DL могут выполняться посредством использования схемы дуплекса с временным разделением каналов (TDD), схемы дуплекса с частотным разделением каналов (FDD) и схемы полудуплексного FDD (H-FDD). В схеме TDD передачи UL и DL выполняются в разных промежутках времени посредством использования одной и той же полосы частот.
В схеме FDD передачи UL и DL выполняются одновременно посредством использования разных полос частот. В схеме H-FDD, передачи UL и DL выполняются в разные промежутки времени посредством использования разных полос частот.
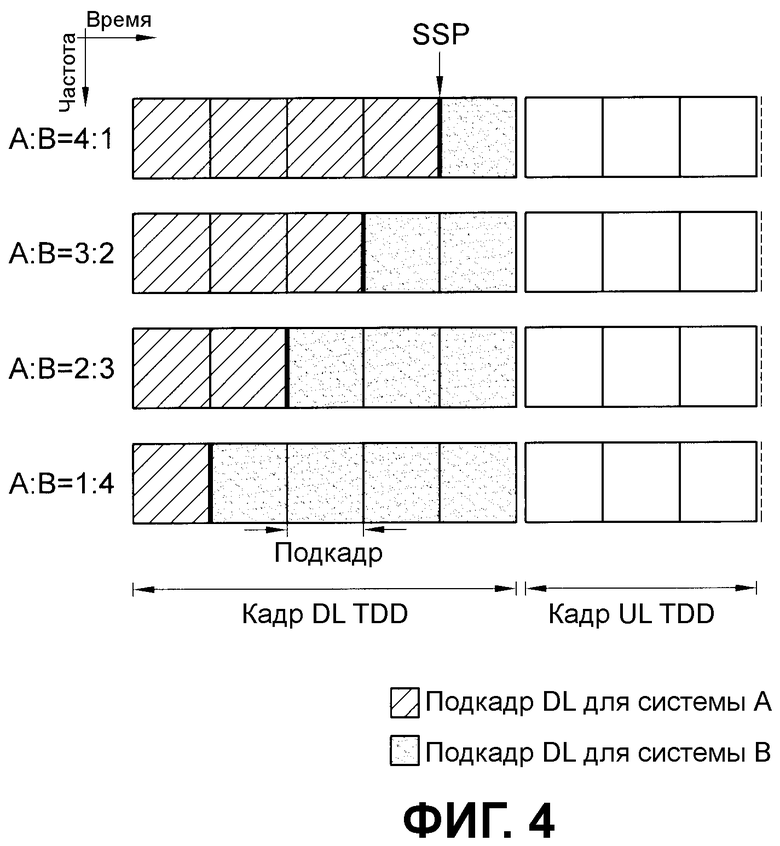
Фиг.4 показывает пример кадра, поддерживающего разнородные системы. В этом случае система A и система B используют схему TDD.
Со ссылкой на фиг.4, кадр включает в себя кадр DL и кадр UL. В схеме TDD кадр DL предшествует по времени кадру UL. Кадр DL и кадр UL включают в себя множество подкадров. Подкадр включает в себя множество символов OFDM. Множество подкадров используется в качестве подкадров для системы A и подкадров для системы B. То есть, кадр DL и кадр UL включают в себя подкадры для системы A и подкадры для системы B в определенном отношении. Предполагается, что все подкадры для системы A в кадре DL или кадре UL указываются ссылкой как область ресурсов для системы A, а все подкадры для системы B указываются ссылкой как область ресурсов для системы B. Подкадр является минимальной единицей определения отношения радиоресурсов, выделенных для системы A, к радиоресурсам, выделенным для системы B в кадре DL или кадре UL.
Для пояснения, предполагается, что кадр DL включает в себя 5 подкадров, а кадр UL включает в себя 3 подкадра. В кадре DL A:B, которое является отношением подкадров для системы A к подкадрам для системы B, может быть определено по-разному, таким как 4:1, 3:2, 2:3, 1:4. Граница между подкадром для системы A и подкадром для системы B указывается ссылкой как точка переключения систем (SSP). Способ выделения ресурсов в зависимости от системы может изменяться, когда SSP используется в качестве границы в кадре. Например, при использовании SSP в качестве границы, правило перестановки, такое как PUSC, FUSC, AMC, и т.д., может использоваться в области ресурсов для системы A, и вновь определенное правило перестановки может использоваться в области ресурсов для системы B. Положение SSP в кадре может изменяться в зависимости от изменения отношения подкадра для системы A к подкадру для системы B.
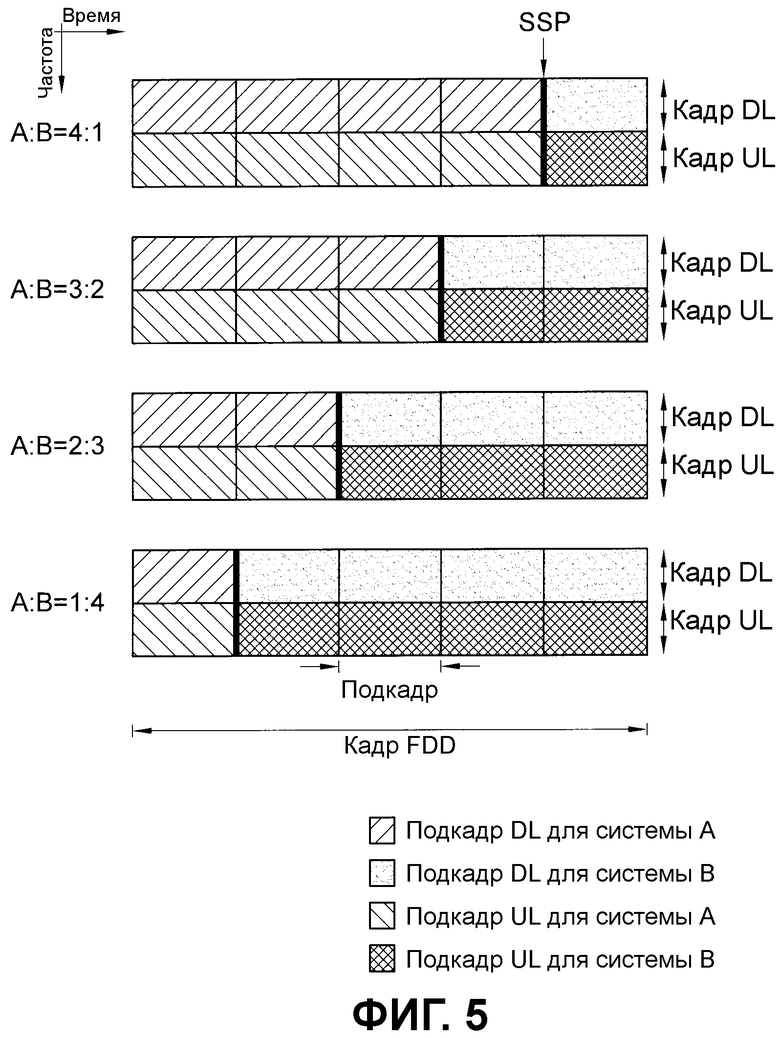
Фиг.5 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае, система A и система B используют схему FDD.
Со ссылкой на фиг.5, кадр является кадром типа FDD, в котором кадр DL и кадр UL разделены в частотной области. Кадр DL и кадр UL мультиплексируются с использованием схемы TDM, в которой подкадр для системы A и подкадр для системы B разделены по времени. Когда каждый из кадра DL и кадра UL включает в себя 5 подкадров, A:B, которое является отношением подкадров для системы A к подкадрам для системы B, может быть определено по-разному, таким как 4:1, 3:2, 2:3, 1:4.
Между тем, когда подкадр для системы A и подкадр для системы B мультиплексируются с использованием схемы TDM в кадре DL, подкадры могут мультиплексироваться с использованием схемы FDM в кадре UL.
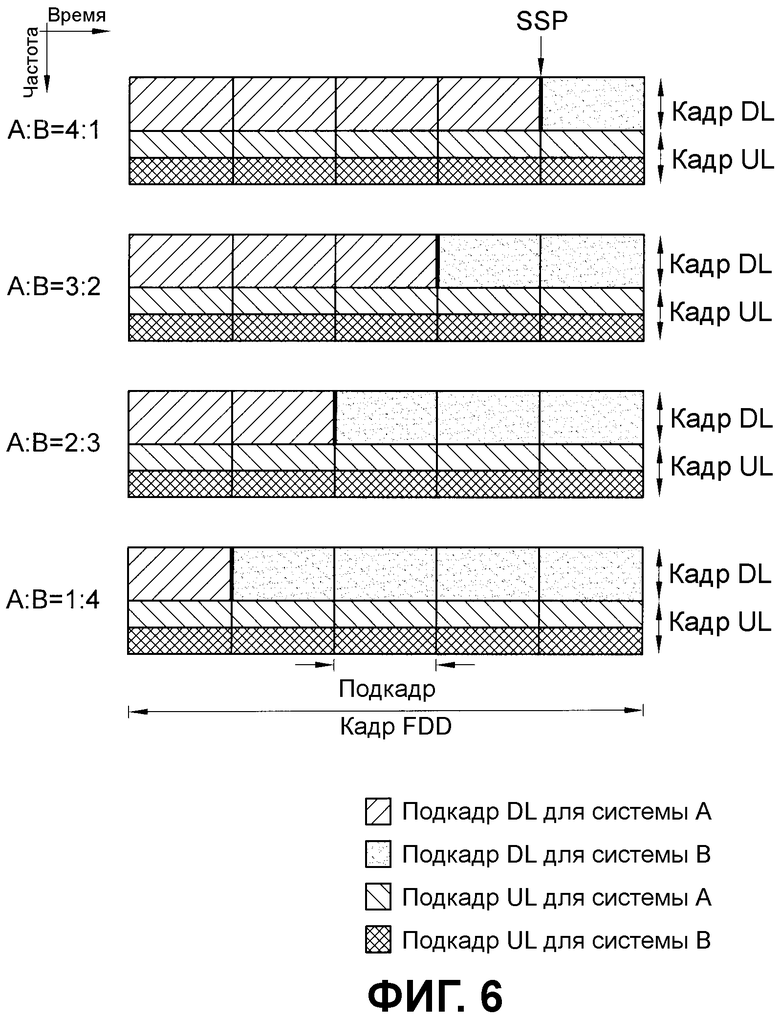
Фиг.6 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае, касательно кадра типа FDD, подкадр для системы A и подкадр для системы B мультиплексируются с использованием схемы FDM в кадре UL.
Со ссылкой на фиг.6, кадр является кадром типа FDD, в котором кадр DL и кадр UL разделены в частотной области. В кадре DL, подкадр DL для системы A и подкадр DL для системы B мультиплексируются с использованием схемы TDM, в которой подкадры разделены по времени. С другой стороны, в кадре UL, подкадр UL для системы A и подкадр UL для системы B мультиплексируются с использованием схемы FDM, в которой подкадры разделены спектрально.
Когда кадр DL включает в себя 5 подкадров, A:B, которое является отношением подкадров DL для системы A к подкадрам DL для системы B в кадре DL, может быть определено по-разному, таким как 4:1, 3:2, 2:3, 1:4. В кадре DL, положение SSP изменяется согласно отношению подкадра DL для системы A к подкадру DL для системы B. Поскольку подкадр UL для системы A и подкадр UL для системы B мультиплексируются с использованием схемы FDM в кадре UL, количество подкадров UL для системы A равно количеству подкадров UL для системы B.
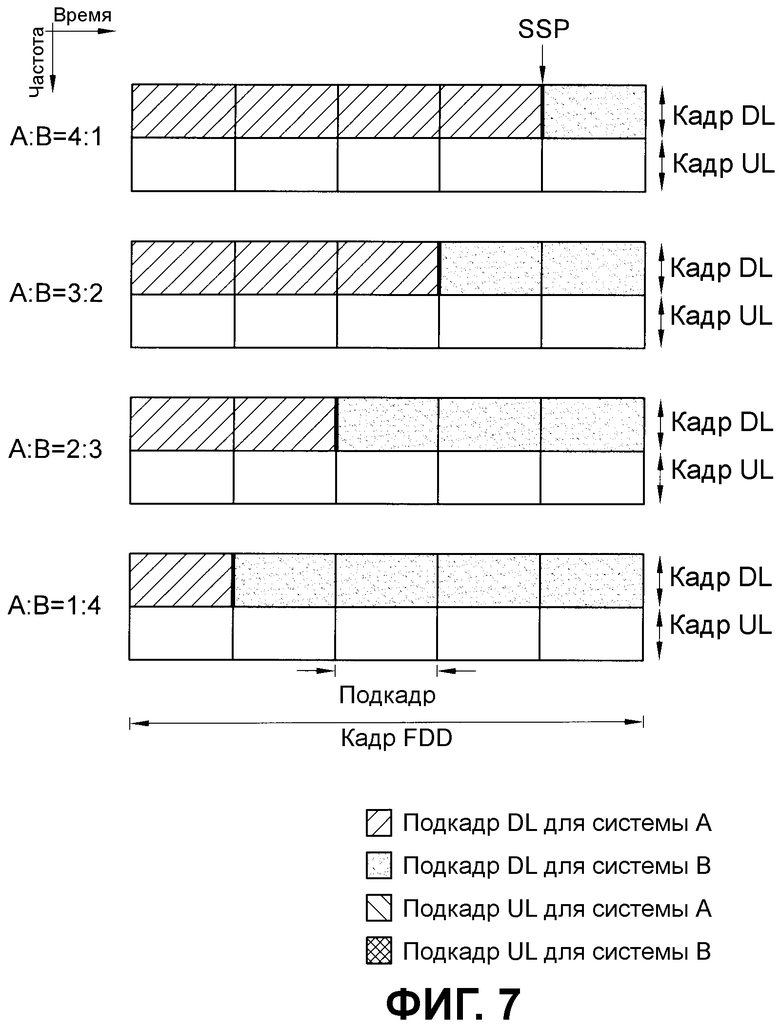
Фиг.7 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае нет ограничения на кадр UL в кадре типа FDD.
Со ссылкой на фиг.7, в кадре типа FDD по фиг.5, количество подкадров для системы A и количество подкадров для системы B определены, чтобы быть равными друг другу в кадре DL и кадре UL. То есть SSP применяется одинаково в кадре DL и кадре UL. Однако в кадре типа FDD по фиг.6 подкадр UL для системы A и подкадр UL для системы B мультиплексируются с использованием схемы FDM, а SSP применяется только в кадре DL.
По существу, в кадре типа FDD, количество подкадров для системы A и количество подкадров для системы B могут определяться, чтобы быть отличными друг от друга в кадре DL и кадре UL, и, таким образом, положение SSP может определяться по-разному. В кадре UL способ мультиплексирования подкадра для системы A и подкадра для системы B может не быть ограниченным, и при рассмотрении только кадра DL, кадр FDD может быть представлен, как проиллюстрировано. В этом случае положение SSP изменяется согласно отношению подкадра DL для системы A к подкадру DL для системы B в кадре DL.
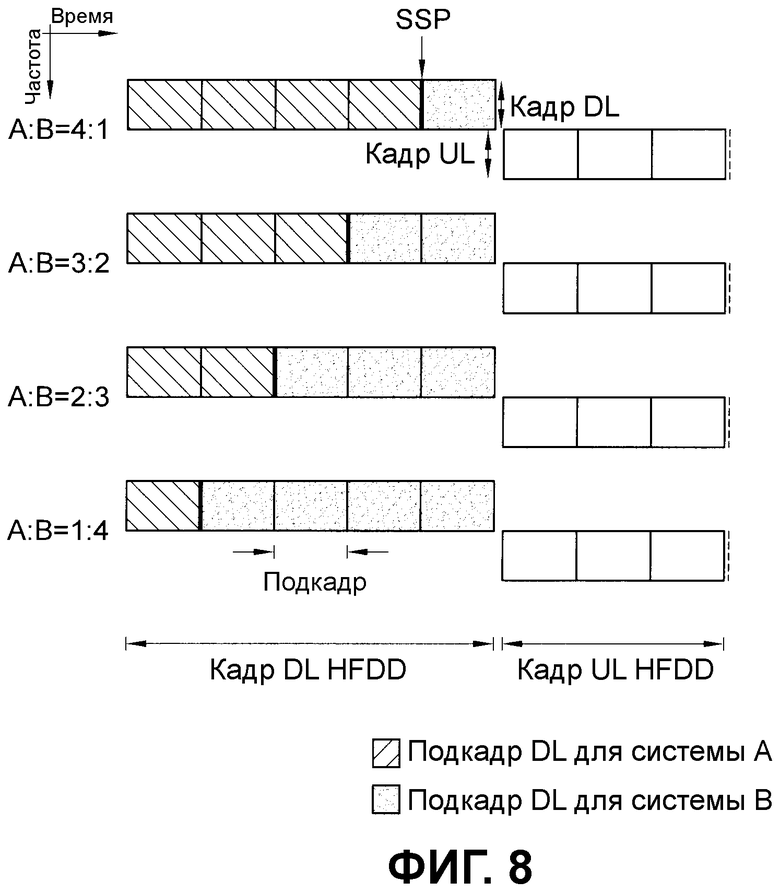
Фиг.8 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае система A и система B используют схему H-FDD.
Со ссылкой на фиг.8, поскольку схема H-FDD выполняет передачу DL и передачу UL в разных промежутках времени посредством использования разных полос частот, кадр DL и кадр UL занимают разные частотные области и разные временные области. В кадре DL, подкадр DL для системы A и подкадр DL для системы B могут мультиплексироваться с различными отношениями посредством использования схемы TDM, и положение SSP определяется согласно отношениям. В кадре UL схема мультиплексирования подкадров не является сугубо ограниченной.
Фиг.9 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае система A использует схему TDD, а система B использует схему FDD.
Со ссылкой на фиг.9, поскольку система A использует схему TDD, кадры DL и UL системы A разделены во временной области. Поскольку система B использует схему FDD, кадры DL и UL системы B разделены в частотной области. Подкадр DL для системы A и подкадр DL/UL для системы B могут мультиплексироваться с использованием схемы TDM в кадре DL. Отношение подкадра DL для системы A и подкадра DL для системы B может быть определено различно. Поскольку система B использует схему FDD, количество подкадров DL для системы B равно количеству подкадров UL для системы B. В кадре UL схема мультиплексирования подкадров не является сугубо ограниченной.
В вышеприведенном описании схема передачи, в которой передача DL и передача UL разделены во временной области или частотной области, могут использоваться одинаково или по-разному в системе A и системе B. В дополнение к вышеупомянутой схеме передачи, (A, B), которая является комбинацией схемы передачи системы A и схемой передачи системы B, может применяться по-разному, например, (FDD, TDD), (H-FDD, FDD), (H-FDD, TDD), (FDD, H-FDD), (TDD, H-FDD) и т.д., а система A и система B могут мультиплексироваться согласно вышеупомянутой схеме.
Фиг.10 показывает еще один пример кадра, поддерживающего разнородные системы. В этом случае количество точек переключения систем (SSP) изменяется, когда отношение подкадра для системы A к подкадру для системы B является постоянным.
Со ссылкой на фиг.10, предполагается, что A:B, которое является отношение подкадра DL для системы A к подкадру DL для системы B, имеет значение 3:2 в кадре DL, включающем в себя 5 подкадров. Количество SSP может отличаться в зависимости от компоновки подкадра DL для системы A и подкадра DL для системы B. Когда подкадры для одной и той же системы скомпонованы последовательно, одна SSP предусмотрена для системы A и системы B в кадре DL. Однако, когда подкадры для одной и той же системы распределены и, таким образом, подкадры для системы A и системы B мультиплексируются в компоновке, две или более SSP присутствуют в кадре DL.
Когда переключение между системами происходит часто в одном кадре, должен часто изменяться параметр для системы. Это может иметь следствием увеличение сложности алгоритма и увеличение служебных данных системы, тем самым, ухудшая эффективность передачи. Поэтому есть необходимость минимизировать количество SSP в одном кадре. То есть предпочтительно иметь одну SSP посредством компоновки подкадра для системы A и подкадра для системы B последовательно в кадре, поддерживающем систему A и систему B.
Далее будет описан способ размещения существенной управляющей информации в кадре, поддерживающем две или более систем. В кадре, поддерживающем систему A и систему B, предполагается, что существенная управляющая информация системы A размещена в подкадр DL для системы A, а существенная управляющая информация системы B размещена в подкадр DL для системы B. Существенная управляющая информация является управляющей информацией, которая должна приобретаться UE с использованием соответствующей системы. Например, существенная управляющая информация может быть управляющей информацией, которая должна получаться для выполнения начального поиска соты, выполняемого в начале, после того, как включено питание UE, или неначального поиска соты для выполнения эстафетной передачи обслуживания или измерения соседней соты. Примеры существенной управляющей информации включают в себя преамбулу, FCH, DL-MAP/UL-MAP и т.д. В дополнение к ним, существенная управляющая информация может быть системной информацией, информацией о синхронизации или тому подобной, которая широковещательно передается. Поскольку существенная управляющая информация передается через кадр DL с BS на UE, схема мультиплексирования разнородных систем не ограничена кадром UL. В кадре UL разнородные системы могут мультиплексироваться с использованием различных схем, таких как схема TDM, схема FDM, схема CDM и так далее.
Фиг.11 показывает пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация системы A и существенная управляющая информация системы B размещаются в фиксированном положении в кадре, в котором система A и система B используют схему TDD.
Со ссылкой на фиг.11, когда кадр DL включает в себя 5 подкадров, предполагается, что существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B неизменно размещается в третий подкадр DL. Поскольку каждая существенная управляющая информация должна размещаться в подкадре DL соответствующей системы, первый подкадр DL, в который размещена существенная управляющая информация системы A, всегда является подкадром DL для системы A, а третий подкадр DL, в который размещена существенная управляющая информация системы B, всегда является подкадром DL для системы B. Если A:B, которое является отношением подкадра DL для системы A к подкадру DL для системы B, имеет значение 4:1 или 3:2, присутствуют две SSP, а если A:B имеет значение 2:3 или 1:4, присутствует одна SSP.
Когда существенная управляющая информация системы A и существенная управляющая информация системы B размещены в постоянном положении в кадре, положение существенной управляющей информации не изменяется, даже если есть изменение в отношении подкадра DL для системы A к подкадру DL для системы B. Поэтому UE не должно информироваться о специфичном значении сдвига для указания положения существенной управляющей информации. В дополнение, можно решать проблему в том, что UE должно повторно выполнять начальную последовательность операций входа в сеть для того, чтобы получать существенную управляющую информацию.
Например, в кадре DL, имеющем одну SSP, предполагается, что существенная управляющая информация системы A размещается неизменно в первый подкадр, тогда как существенная управляющая информация системы B размещается в подкадр, прилегающий к SSP. По мере того как изменяется отношение подкадра DL для системы A к подкадру DL для системы B, изменяется положение существенной управляющей информации системы B. В этом случае положение существенной управляющей информации системы B должно сообщаться посредством использования специфичного значения сдвига согласно существенной управляющей информации системы A. Если положение существенной управляющей информации системы B не указано значением сдвига, UE должно повторно выполнять начальную последовательность операций сетевой сущности для того, чтобы получать существенную управляющую информацию системы B. Это может быть причиной задержки последовательности операций, которая выполняется посредством UE для получения существенной управляющей информации системы B. Такая проблема не возникает, когда существенная управляющая информация системы A и системы B размещены в постоянном положении в кадре DL.
Фиг.12 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация системы A и существенная управляющая информация системы B размещаются в фиксированном положении в кадре, в котором система A и система B используют схему FDD.
Со ссылкой на фиг.12, когда кадр DL включает в себя 5 подкадров в кадре FDD, предполагается, что существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B неизменно размещается в третий подкадр DL. Если A:B, которое является отношением подкадра DL для системы A к подкадру DL для системы B, имеет значение 4:1 или 3:2, присутствуют две SSP, а если A:B имеет значение 2:3 или 1:4, присутствует одна SSP. Поскольку положение существенной управляющей информации не изменяется, даже если меняется отношение подкадра DL для системы A к подкадру DL для системы B, UE не должно информироваться о специфичном значении сдвига для указания существенной управляющей информации, и UE не должно повторно выполнять начальную последовательность операций входа в сеть для получения существенной управляющей информации.
Однако, когда существенная управляющая информация системы B неизменно размещается в третий подкадр DL среди 5 подкадров DL, есть случай, где присутствуют две SSP согласно отношению подкадра DL для системы A к подкадру DL для системы B. Когда определено, что следует использовать множество SSP в одном кадре, частая смена между системами имеет следствием повышение сложности алгоритма и снижение эффективности системы. Поэтому предпочтительно минимизировать количество SSP наряду с размещением существенной управляющей информации в кадре.
Фиг.13 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация системы B неизменно размещается в последний по времени подкадр кадра DL в кадре, в котором система A и система B используют схему TDD.
Со ссылкой на фиг.13, когда кадр DL включает в себя 5 подкадров, существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B размещается в пятый подкадр DL, то есть неизменно размещается в последний по времени подкадр DL. Существенная управляющая информация системы A и существенная управляющая информация системы B соответственно размещаются в подкадры DL, расположенные на обоих концах кадра DL. В кадре типа TDD существенная управляющая информации системы B размещается в подкадр DL, соседний паузе переключения передачи/приема (TTG), которая является защитным интервалом между кадром DL и кадром UL.
По существу, когда существенная управляющая информация системы A и существенная управляющая информация системы B размещаются в подкадры DL, расположенные на обоих концах неизменного кадра DL, количество SSP может всегда сохраняться единичным, даже если изменяется отношение подкадра DL для системы A и подкадра DL для системы B. Поэтому UE не должно информироваться о специфичном значении сдвига для указания положения существенной управляющей информации, а увеличение сложности алгоритма, обусловленное частой сменой систем, может избегаться.
Фиг.14 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае в кадре, в котором система A и система B используют схему FDD, существенная управляющая информация системы B неизменно размещается в последний по времени подкадр в кадре DL.
Со ссылкой на фиг.14, когда существенная управляющая информация системы A и существенная управляющая информация системы B соответственно размещаются в подкадры DL, расположенные на обоих концах кадра DL, количество SSP может всегда сохраняться единичным в кадре, в котором система A и система B используют схему FDD, даже если изменяется отношение подкадра DL для системы A к подкадру DL для системы B. Поэтому UE не должно информироваться о специфичном значении сдвига для указания положения существенной управляющей информации, а увеличение сложности алгоритма, обусловленное частой сменой систем, может избегаться.
Фиг.15 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация размещается в неизменном положении в кадре TDD, принимая во внимание диапазон изменений отношения подкадра DL для системы A к подкадру DL для системы B.
Со ссылкой на фиг.15, когда кадр DL у кадра, в котором система A и система B используют схему TDD, включает в себя 5 подкадров, предполагается, что A:B, которое является отношением подкадра DL для системы A к подкадру DL для системы B, изменяется с диапазоном изменений 3:2, 2:3 и 1:4. Количество подкадров DL для системы находится в диапазоне от 1 до 3, а количество подкадров DL для системы B находится в диапазоне от 2 до 4.
Существенная управляющая информация системы B неизменно размещается в положение, отделенное от последнего подкадра DL у кадра DL минимальным количеством подкадров DL для системы B. Поскольку по меньшей мере два подкадра DL выделены для системы B, существенная управляющая информация системы B неизменно размещается во второй последний подкадр DL от последнего подкадра DL у кадра DL. Существенная управляющая информация системы A может всегда размещаться неизменно в первый подкадр DL, или может размещаться неизменно в подкадр DL, отделенный от первого подкадра DL минимальным количеством подкадров DL для системы A.
По существу, количество SSP может всегда сохраняться единичным посредством неизменного размещения существенной управляющей информации системы B в подкадр DL, отделенный от последнего подкадра DL минимальным количеством подкадров DL для системы B. Поэтому, могут достигаться как преимущество размещения существенной управляющей информации в неизменном положении, так и преимущество минимизации количества SSP.
Фиг.16 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация размещается в неизменном положении в кадре FDD, принимая во внимание диапазон изменений отношения подкадра DL для системы A к подкадру DL для системы B.
Со ссылкой на фиг.16, в кадре, в котором система A и система B используют схему FDD, количество SSP может всегда сохраняться единичным посредством неизменного размещения существенной управляющей информации системы B в подкадр DL, отделенный от последнего подкадра DL минимальным количеством подкадров DL для системы B. Существенная управляющая информация системы A может всегда размещаться неизменно в первый подкадр DL, или может размещаться неизменно в подкадр DL, отделенный от первого подкадра DL на минимальное количество подкадров DL для системы A. Поэтому могут достигаться как преимущество размещения существенной управляющей информации в неизменном положении, так и преимущество минимизации количества SSP.
Фиг.17 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация размещается в неизменном положении в кадре TDD, не принимая во внимание диапазон изменений отношения подкадра DL для системы A к подкадру DL для системы B.
Со ссылкой на фиг.17, в случае, где диапазон изменений отношения подкадра DL для системы A и подкадра DL для системы B не учитывается в кадре TDD, существенная управляющая информация системы A размещается неизменно в первый подкадр DL, как показано на фиг.13, а существенная управляющая информация системы B неизменно размещается в последний подкадр DL, и, таким образом, количество SSP может сохраняться единичным.
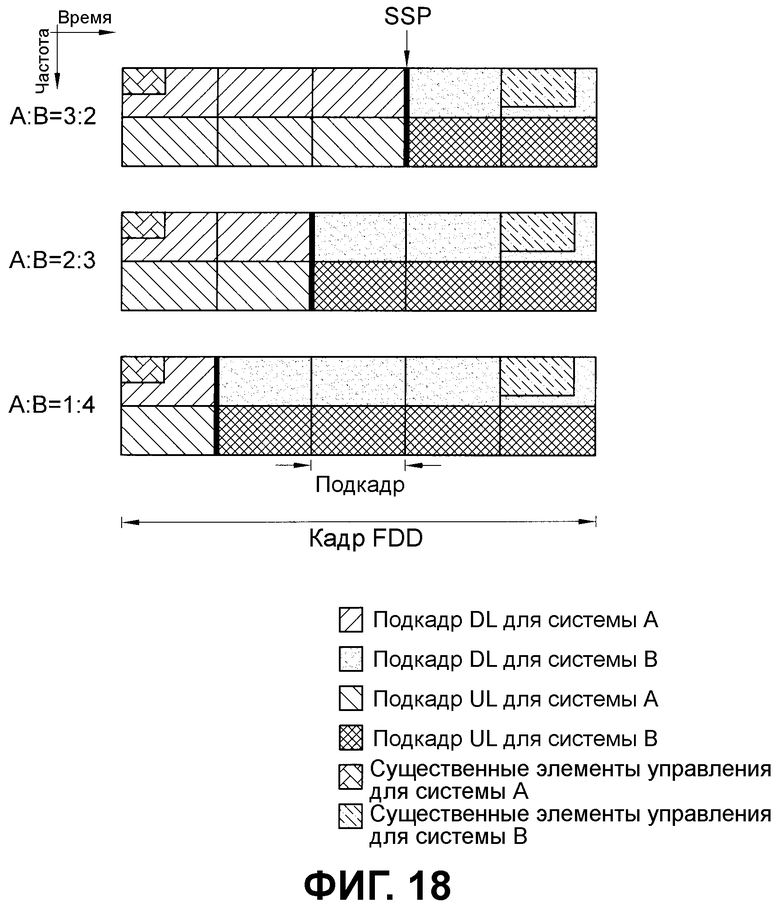
Фиг.18 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. В этом случае существенная управляющая информация размещается в неизменном положении в кадре FDD без учета диапазона изменений отношения подкадра DL для системы A к подкадру DL для системы B.
Со ссылкой на фиг.18, в случае, где диапазон изменений отношения подкадра DL для системы A и подкадра DL для системы B не учитывается в кадре FDD, существенная управляющая информация системы A размещается неизменно в первый подкадр DL, как показано на фиг.13, а существенная управляющая информация системы B неизменно размещается в последний подкадр DL, и, таким образом, количество SSP может сохраняться единичным.
В дальнейшем, будет описано размещение существенной управляющей информации в кадре с использованием основанной на комплементарной группировке и планировании схемы H-FDD. Основанная на CGS схема H-FDD предназначена для эффективного использования радиоресурса, теряемого в схеме H-FDD, в которой передача DL и передача UL должны выполняться в разных промежутках времени посредством использования разных полос частот. Прежде всего, основанная на CGS схема H-FDD будет описана в сравнении со схемой FDD и схемой H-FDD.
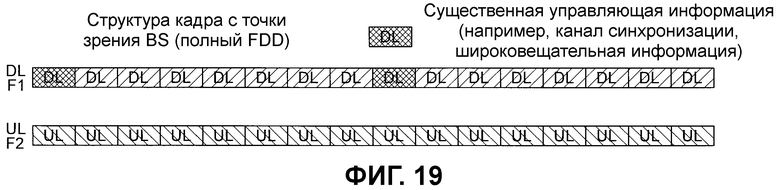
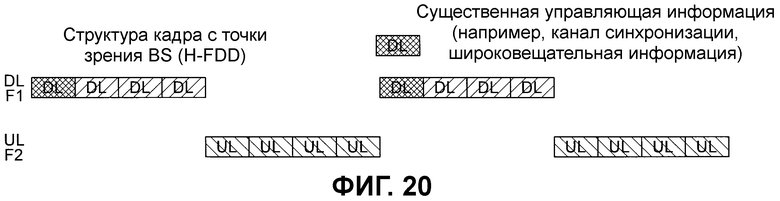
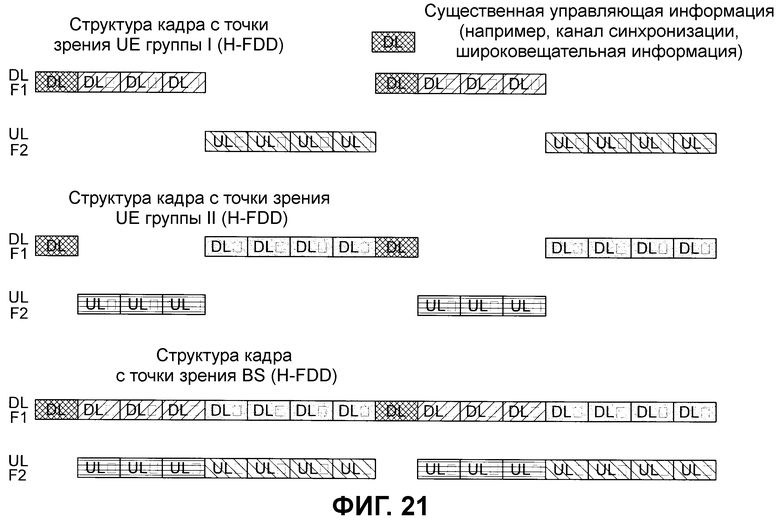
Фиг.19 показывает пример управляющей информации в кадре FDD. Фиг.20 показывает пример управляющей информации в кадре H-FDD. Фиг.21 показывает пример управляющей информации в кадре основанного на CGS H-FDD.
Со ссылкой на с фиг.19 по фиг.21, в кадре типа FDD с точки зрения BS, кадр DL и кадр UL разделены в частотной области. Передача DL и передача UL выполняются одновременно посредством использования разных полос частот. Существенная управляющая информация может передаваться через подкадры с определенным разнесением в кадре DL.
В кадре типа H-FDD с точки зрения BS, кадр DL и кадр UL разделены в частотной области и временной области. Передача DL и передача UL выполняются в разных промежутках времени посредством использования разных полос частот. Существенная управляющая информация может передаваться через подкадры с определенным разнесением в кадре DL. В схеме H-FDD, поскольку передача UL не может выполняться, в то время как выполняется передача DL, присутствует неиспользуемая область ресурсов, и, таким образом, радиоресурсы тратятся впустую до такой степени.
В основанной на CGS схеме H-FDD, когда UE поделены на множество групп, так что подкадр DL выделен под UE первой группы, подкадр UL выделен под UE второй группы, а когда подкадр UL выделяется под UE первой группы, подкадр DL выделяется под UE второй группы. То есть радиоресурсы DL и радиоресурсы UL попеременно выделяются UE первой группы и UE второй группы. С точки зрения UE первой группы, удовлетворена схема H-FDD, в которой передача DL и передача UL выполняются в разных полосах частот в разных промежутках времени. В дополнение, схема H-FDD также удовлетворена с точки зрения второй группы. В основанной на CGS схеме H-FDD, поскольку передача DL и передача UL выполняются одновременно с точки зрения BS, расход радиоресурсов впустую может быть уменьшен. Однако, поскольку существенная управляющая информация должна приниматься одновременно UE первой группы и UE второй группы, подкадр, в который размещается существенная управляющая информация, используется UE двух групп в качестве одного и того же подкадра DL.
Далее, будет описано размещение существенной управляющей информации, когда основанная на CGS схема H-FDD применяется в кадре, поддерживающем разнородные системы.
Фиг.22 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы.
Со ссылкой на фиг.22, предполагается, что система A использует схему FDD, а система B использует основанную на CGS схему H-FDD. Существенная управляющая информация системы A неизменно размещается в первый подкадр DL в кадре DL, а существенная управляющая информация системы B неизменно размещается в последний подкадр DL в кадре DL.
Поскольку система B использует основанную на CGS схему H-FDD, для оставшихся подкадров, иных чем подкадр временной области, в который размещается существенная управляющая информация, подкадр DL для первой группы системы B и подкадр UL для второй группы системы B размещены в одной и той же временной области, и подкадр UL для первой группы системы B и подкадр DL для второй группы системы B размещены в одной и той же временной области.
По существу, посредством размещения существенной управляющей информации системы B с использованием основанной на CGS схемы H-FDD в последний подкадр DL кадра DL, количество SSP всегда может поддерживаться единичным, даже если есть изменение в отношении подкадра DL для системы A к подкадру DL для системы B.
В дополнении к этому, (A, B), которая является комбинацией схемы передачи системы A и схемы передачи системы B, может применяться по-разному, к примеру, (TDD, основанный на CGS H-FDD), (основанный на CGS H-FDD, основанный на CGS H-FDD), и т.д. Даже в этом случае, посредством размещения существенной управляющей информации в последний подкадр DL кадра DL, количество SSP всегда может сохраняться единичным, независимо от отношения подкадра DL для системы A к подкадру DL для системы B.
В вышеупомянутом кадре, поддерживающем разнородные системы, система B мультиплексируется по отношению к системе A. То есть в вышеупомянутой структуре кадра разнородные системы поддерживаются с точки зрения системы A. Например, если система A является унаследованной системой, а система B является эволюционной системой, предполагается, что система A размещается по времени раньше системы B ради обратной совместимости в кадре, а затем дополнительно размещается система B. Однако кадр подразумевает последовательность данных в течение определенного периода времени в процессе непрерывной передачи данных, и, таким образом, система, которая находится по времени раньше другой системы в кадре, может отличаться в зависимости от определения в кадре.
В дальнейшем, будет описана структура кадра, поддерживающая разнородные системы, определенные с точки зрения каждой системы.
Фиг.23 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. Фиг.24 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. Кадр по фиг.23 является кадром TDD, определенным с точки зрения системы A. Кадр по фиг.24 является кадром TDD, определенным с точки зрения системы B.
Со ссылкой на фиг.23 и фиг.24, в кадре TDD, определенном с точки зрения системы A, существенная управляющая информация системы A может быть определена в качестве начала кадра, а RTG (или время бездействия) может быть определена в качестве конца кадра. Существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B размещается в последний подкадр DL.
В кадре TDD, определенном с точки зрения системы B, существенная управляющая информация системы B может быть определена в качестве начала кадра. Вслед за подкадром DL, в который размещена существенная управляющая информация системы B, следует кадр UL с TTG, являющейся расположенной между ними. В дополнение, вслед за кадром UL следует кадр DL, начинающийся с подкадра, в который размещена существенная управляющая информация системы A, с RTG, являющейся расположенной между ними. Конец кадра может быть определен в качестве конца последнего подкадра DL в кадре DL. Вслед за концом кадра, существенная управляющая информация системы следует в качестве начала следующего кадра. При принятии во внимание зависимости смежных кадров она является такой же, как когда существенная управляющая информация системы A размещается в первый подкадр DL в кадре DL, а существенная управляющая информация системы B размещается в последний подкадр DL в кадре DL. То есть она является такой же, как когда подкадры в кадре циклически сдвинуты, так что подкадр DL, в который размещается существенная управляющая информация системы B, входит первым в кадр в кадре FDD, определенном с точки зрения системы A.
Независимо от того, определен ли кадр TDD с точки зрения системы A, или кадр TDD определен с точки зрения системы B, когда циклический сдвиг выполнен так, что существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B размещается в последний подкадр в смежных кадрах DL, количество SSP может сохраняться единичным.
Фиг.25 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. Фиг.26 показывает еще один пример управляющей информации в кадре, поддерживающем разнородные системы. Кадр по фиг.25 является кадром DL кадра FDD, определенного с точки зрения системы A. Кадр по фиг.26 является кадром DL кадра FDD, определенного с точки зрения системы B.
Со ссылкой на фиг.25 и фиг.26, в кадре FDD, определенном с точки зрения системы A, существенная управляющая информация системы A может быть определена в качестве начала кадра, а время бездействия может быть определено в качестве конца кадра. Существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B размещается в последний подкадр DL.
В кадре FDD, определенном с точки зрения системы B, существенная управляющая информация системы B может быть определена в качестве начала кадра. Вслед за подкадром DL, в который размещена существенная управляющая информация системы B, следует подкадр DL для системы A с временем бездействия, расположенным между ними. Существенная управляющая информация системы A размещается в первый подкадр DL среди подкадров DL для системы A. Вслед за подкадром DL для системы A, следует подкадр DL для системы B за исключением подкадра DL, в который размещена существенная управляющая информация системы B. Конец кадра может быть определен в качестве конца последнего подкадра DL среди подкадров DL для системы B. Он является таким же, как когда подкадры в кадре циклически сдвинуты, так что подкадр DL, в котором размещена существенная управляющая информация системы B, входит первым в кадр в кадре FDD, определенном с точки зрения системы A.
Независимо от того, определен ли кадр FDD с точки зрения системы A, или кадр FDD определен с точки зрения системы B, когда циклический сдвиг выполнен так, что существенная управляющая информация системы A размещается в первый подкадр DL, а существенная управляющая информация системы B размещается в последний подкадр в смежных кадрах DL, количество SSP может сохраняться единичным.
Размер кадра для поддержки разнородных систем может быть определен из условия, чтобы множество подкадров было включено в состав и был включен в состав, по меньшей мере, один кусок существенной управляющей информации. То есть кадр может быть определен в качестве периода существенной управляющей информации. Существенная управляющая информация системы A и системы B могут быть размещены вместе в одном кадре наряду с обладанием одним и тем же периодом или разными периодами. В дальнейшем, будет описан случай, где существенная управляющая информация системы A и существенная управляющая информация системы B имеют разные периоды.
Фиг.27 показывает пример суперкадра, поддерживающего разнородные системы. Суперкадр по фиг.27 является суперкадром с точки зрения системы B, когда система A и система B используют схему TDD.
Со ссылкой на фиг.27, существенная управляющая информация системы B и существенная управляющая информация системы A имеют размер, который является целым числом, кратным периоду. То есть размер кадра для системы B является целым числом, кратным размеру кадра для системы A. Период существенной управляющей информации системы A может рассматриваться в качестве размера кадра, а период существенной управляющей информации системы B может рассматриваться в качестве размера суперкадра.
Существенная управляющая информация системы B размещается в первый подкадр суперкадра. Существенная управляющая информация системы B может рассматриваться в качестве заголовка суперкадра. Системная информация, информация о синхронизации или тому подобное, которые должны широковещательно передаваться, размещаются в заголовок суперкадра. Суперкадр включает в себя множество кадров. Существенная управляющая информация системы A размещается в каждый кадр. В кадре, с точки зрения системы A, существенная управляющая информация системы A размещается в первый подкадр кадра и может рассматриваться в качестве заголовка кадра. Заголовок кадра включает в себя информацию о конфигурации ресурсов кадра. Нет ограничения на количество кадров, включенных в суперкадр.
Фиг.28 показывает еще один пример суперкадра, поддерживающего разнородные системы. Суперкадр по фиг.28 является суперкадром DL с точки зрения системы B, когда система A и система B используют схему FDD.
Со ссылкой на фиг.28, существенная управляющая информация системы B и существенная управляющая информация системы A имеют размер, который является целым числом, кратным периоду. Период существенной управляющей информации системы A может рассматриваться в качестве размера кадра, а период существенной управляющей информации системы B может рассматриваться в качестве размера суперкадра. Существенная управляющая информация системы B размещена в первом подкадре суперкадра и может рассматриваться в качестве заголовка суперкадра. Системная информация, информация о синхронизации или тому подобное, которые должны широковещательно передаваться, размещаются в заголовок суперкадра. Суперкадр включает в себя множество кадров. Существенная управляющая информация системы A размещается в каждый кадр. В кадре, с точки зрения системы A, существенная управляющая информация системы A размещается в первый подкадр кадра и может рассматриваться в качестве заголовка кадра. Заголовок кадра включает в себя информацию о конфигурации ресурсов кадра. Нет ограничения на количество кадров, включенных в суперкадр.
В предложенном кадре, описанном выше, существенная управляющая информация не ограничена определением минимальной управляющей информации, которая должна быть приобретена UE с использованием соответствующей системы. Существенная управляющая информация системы A и существенная управляющая информация системы B могут состоять из одного и того же типа управляющей информации или могут состоять из разных типов управляющей информации. Кроме того, суперкадр, кадр и подкадр не ограничены по своим размерам. Система A и система B могут использовать кадры различных размеров. Однако размер подкадра, который является минимальной единицей мультиплексирования системы A и системы B, может быть идентичным между системами. В дополнение, поскольку предложенный способ размещения управляющей информации выполняется с использованием передачи DL, способ мультиплексирования разнородных систем не является сугубо ограниченным передачей UL. В качестве радиоресурса для существенной управляющей информации может быть выделена вся совокупность или часть подкадра. Когда радиоресурс для существенной управляющей информации выделяется в качестве части подкадра, положение, размер или тому подобное, у существенной управляющей информации не ограничено подкадром.
Согласно настоящему изобретению, в кадре, поддерживающем разнородные системы, существенная управляющая информация может неизменно размещаться в определенном положении наряду с сохранением количества точек переключения систем, в которых происходит переключение между системами, единичным, даже если объем выделения радиоресурсов меняется между системами, и, таким образом, существенная управляющая информация, которая должна приниматься всеми пользовательскими оборудованиями, может эффективно предоставляться без увеличения служебных данных. В дополнение, измерение соты может выполняться для эстафетной передачи обслуживания на основе существенной управляющей информации, размещенной в постоянное положение, без вынуждения выявлять, мультиплексируются ли разнородные системы, и, таким образом, служебные данные, вызванные управляющей сигнализацией, могут быть сокращены.
Все функции, описанные выше, могут выполняться процессором, таким как микропроцессор, контроллер, микроконтроллер и специализированная интегральная схема (ASIC), согласно программному обеспечению или управляющей программе для выполнения функций. Управляющая программа может быть спроектирована, разработана и реализована на основе описаний настоящего изобретения, и это хорошо известно специалистам в данной области техники.
Несмотря на то, что настоящее изобретение было подробно показано и описано со ссылкой на его примерные варианты осуществления, специалистами в данной области техники будет пониматься, что различные изменения по форме и содержанию могут быть произведены в нем, не выходя из сущности и объема изобретения, которые определены прилагаемой формулой изобретения. Примерные варианты осуществления должны рассматриваться только в описательном смысле, а не в целях ограничения. Поэтому объем изобретения определен не подробным описанием изобретения, а прилагаемой формулой изобретения, а все отличия в пределах объема будут истолковываться в качестве являющихся включенными в настоящее изобретение.

Заявленное изобретение относится к размещению управляющей информации в системе беспроводной связи. Технический результат заключается в возможности размещать существенную управляющую информацию в эволюционной системе, удовлетворяющей обратной совместимости с унаследованной системой. Для этого способ включает в себя: размещение существенной управляющей информации первой системы в первый подкадр в кадре, включающем в себя множество подкадров, каждый из которых содержит множество символов мультиплексирования с ортогональным частотным разделением каналов (OFDM); и размещение существенной управляющей информации второй системы в nый подкадр в фиксированном положении от первого подкадра (где n - целое число, удовлетворяющее n>1). Соответственно, в кадре, поддерживающем разнородные системы, существенная управляющая информация может неизменно размещаться в определенное положение наряду с сохранением количества точек переключения систем, в которых происходит переключение между системами, единичным, даже если объем выделения радиоресурсов между системами изменяется, и, таким образом, существенная управляющая информация, которая должна приниматься всеми пользовательскими оборудованиями, может эффективно поставляться без увеличения служебных данных. 3 н. и 12 з.п. ф-лы, 1 табл., 28 ил.
1. Способ для передачи управляющей информации в системе беспроводной связи, содержащий этапы, на которых:
размещают первое подмножество подкадров нисходящей линии связи для первой системы в кадре, первое подмножество включает в себя, по меньшей мере, один подкадр нисходящей линии связи;
размещают второе подмножество подкадров нисходящей линии связи для второй системы в кадре, второе подмножество включает в себя множество смежных подкадров нисходящей линии связи;
передают заголовок управления кадром (FCH) в первом подмножестве, причем FCH включает в себя существенную управляющую информацию для первой системы; и
передают заголовок суперкадра (SFH) во втором подмножестве, причем SFH несет существенную информацию о системных параметрах и конфигурации системы для второй системы.
2. Способ по п.1, в котором второе подмножество размещается после первого подмножества.
3. Способ по п.1, в котором
первое подмножество включает в себя две отдельные группы подкадров нисходящей линии связи, каждая отдельная группа включает в себя, по меньшей мере, один подкадр нисходящей линии связи; и
второе подмножество размещается между двумя отдельными группами.
4. Способ по п.1, в котором количество подкадров нисходящей линии связи, включенных в первое подмножество, плюс количество подкадров нисходящей линии связи, включенных во второе подмножество, имеет значение 5.
5. Способ по п.1, в котором отношение количества подкадров нисходящей линии связи, включенных в первое подмножество, к количеству подкадров нисходящей линии связи, включенных во второе подмножество, является одним из 3:2, 2:3 или 1:4.
6. Способ по п.1, в котором FCH передается в первом подкадре нисходящей линии связи в первом подмножестве.
7. Способ по п.1, в котором SFH передается в первом подкадре нисходящей линии связи во втором подмножестве.
8. Способ по п.1, в котором период SFH является целым числом, кратным 40 мс.
9. Способ по п.1, дополнительно состоящий в том, что размещают множество подкадров восходящей линии связи в кадре.
10. Способ по п.9, в котором количеством множества суперкадров восходящей линии связи является 3.
11. Способ демодуляции управляющей информации в системе беспроводной связи, содержащий этапы, на которых:
принимают заголовок суперкадра (SFH), который несет существенную информацию о системных параметрах и конфигурации системы, во втором подмножестве подкадров нисходящей линии связи, второе подмножество включает в себя множество смежных подкадров нисходящей линии связи в кадре;
демодулируют SFH,
при этом кадр дополнительно включает в себя первое подмножество подкадров нисходящей линии связи, первое подмножество включает в себя, по меньшей мере, один подкадр нисходящей линии связи;
и первое подмножество и второе подмножество предназначены, соответственно, для разных систем.
12. Способ по п.11, в котором второе подмножество размещается после первого подмножества.
13. Способ по п.11, в котором
первое подмножество включает в себя две отдельные группы подкадров нисходящей линии связи, каждая отдельная группа включает в себя, по меньшей мере, один подкадр нисходящей линии связи; и
второе подмножество размещается между двумя отдельными группами.
14. Способ по п.11, в котором SFH передается в первом подкадре нисходящей линии связи во втором подмножестве.
15. Устройство для передачи управляющей информации в системе беспроводной связи, устройство содержит:
радиочастотный (РЧ) блок и
процессор, присоединенный к РЧ-блоку и сконфигурированный для:
размещения первого подмножества подкадров нисходящей линии связи для первой системы в кадре, первое подмножество включает в себя, по меньшей мере, один подкадр нисходящей линии связи,
размещения второго подмножества подкадров нисходящей линии связи для второй системы в кадре, второе подмножество включает в себя множество смежных подкадров нисходящей линии связи,
передачи заголовка управления кадром (FCH) в первом подмножестве, FCH включает в себя существенную управляющую информацию для первой системы, и
передачи заголовка суперкадра (SFH) во втором подмножестве, SFH несет существенную информацию о системных параметрах и конфигурации системы для второй системы.
| US 6658235 В1, 02.12.2003 | |||
| СПОСОБ ОБМЕНА СООБЩЕНИЯМИ И РАДИОСИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2292119C2 |
| US 6282430 В1, 28.08.2001 | |||
| US 6941132 В2, 06.09.2005 | |||
| JP 8051422 A, 20.02.1996. | |||

