Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам захвата изображения.
Предшествующий уровень техники
Современные устройства захвата изображения, такие как видеокамера, не только захватывают и записывают движущиеся изображения в соответствии с телевизионным стандартом, но также записывают неподвижные изображения, используя большее количество пикселей, чем это требуется для телевизионного стандарта. Кроме того, поскольку количество пикселей в формирователе сигнала изображения увеличивается, в процессе съемки и записи движущегося изображения необходимо считывать двухмерное изображение с формирователя сигнала изображения, по меньшей мере, в период поля в соответствии с телевизионным стандартом. Поэтому при съемке движущегося изображения и записи движущихся изображений количество пикселей, считываемых с формирователя сигнала изображения, сокращается посредством урезающего чтения, прореживающего чтения, и чтения, добавляющего пиксели, и количество каналов для чтения или скорость чтения увеличивается. Однако увеличенное количество каналов для чтения или более высокая скорость чтения увеличит стоимость и потребление энергии, и поэтому эффективным является предложение сокращения количества пикселей, которые следует считывать с формирователя сигнала изображения при съемке движущегося изображения. На корпусе некоторых видеокамер может находиться переключатель, который переключает между режимом для съемки движущегося изображения и режимом для съемки неподвижного изображения, пусковое устройство для съемки движущегося изображения и пусковое устройство для съемки неподвижного изображения.
С другой стороны, для того чтобы иметь в распоряжении правильные моменты времени для захвата хорошего изображения с использованием упрощенных операций, предлагается устранить переключение между режимом для съемки движущегося изображения и режимом для съемки неподвижного изображения и предоставить возможность съемки неподвижного изображения во время съемки движущегося изображения. Посмотрите, например, PLT1. PLT1 снимает и записывает неподвижные изображения в момент времени поля, и это распространяется на момент времени поля, обычно используемый для генерирования движущегося изображения, и восполняет период поля, в котором движущееся изображение отсутствует, посредством конвертации неподвижного изображения в движущееся изображение.
Однако PLT1 создает проблему неестественного движения в движущемся изображении, когда во время съемки неподвижного изображения отсутствующее движущееся изображение форматно конвертируется из неподвижного изображения, тогда как этот объект движется.
Список цитированных ссылок
Патентная литература
PTL 1: патент № 2001-352483
Сущность изобретения
Техническая задача
Настоящее изобретение предоставляет устройство для захвата изображения, сконфигурированное таким образом, чтобы предотвратить неестественное выходное изображение, получающееся в результате подмешивания неподвижного изображения в движущееся изображение.
Решение задачи
Устройство захвата изображения согласно одному аспекту настоящего изобретения включает в себя формирователь сигнала изображения, сконфигурированный таким образом, чтобы вывести сигнал изображения, полученный посредством захвата объекта; драйвер, сконфигурированный таким образом, чтобы привести в действие формирователь сигнала изображения для захвата объекта с использованием чересстрочной развертки или прогрессивной развертки; детектор, сконфигурированный таким образом, чтобы распознать состояние объекта на основе выходных данных сигнала изображения от формирователя сигнала изображения; контроллер, сконфигурированный таким образом, чтобы управлять драйвером для осуществления им, в соответствии с состоянием объекта, распознанным детектором, отбора или чересстрочной съемки, обычно используемой для захвата объекта с использованием чересстрочной развертки формирователя сигнала изображения, или прогрессивной съемки, обычно используемой для захвата объекта с использованием прогрессивной развертки формирователя сигнала изображения.
Устройство захвата изображения согласно другому аспекту настоящего изобретения включает в себя формирователь сигнала изображения, сконфигурированный таким образом, чтобы вывести сигнал изображения посредством захвата объекта; драйвер, сконфигурированный таким образом, чтобы привести в действие формирователь сигнала изображения для съемки объекта с использованием чересстрочной развертки или прогрессивной развертки; контроллер, сконфигурированный таким образом, чтобы управлять драйвером так, чтобы он, посредством чересстрочной развертки, привел в действие формирователь сигнала изображения для захвата и записи неподвижного изображения во время ожидания захвата и записи движущегося изображения или во время захвата и записи движущегося изображения, или так, чтобы он, посредством прогрессивной развертки, привел в действие формирователь сигнала изображения для захвата и записи неподвижного изображения без захвата или записи движущегося изображения.
Дополнительные признаки настоящего изобретения будут выявлены из нижеследующего описания типовых вариантов осуществления (со ссылками на приложенные чертежи).
Положительные эффекты изобретения
Настоящее изобретение может предоставить устройство захвата изображения, сконфигурированное таким образом, чтобы предотвратить неестественное выходное изображение как результат подмешивания неподвижного изображения в движущееся изображение.
Краткое описание чертежей
ФИГ. 1 представляет собой структурную схему блоков видеокамеры (первый вариант осуществления).
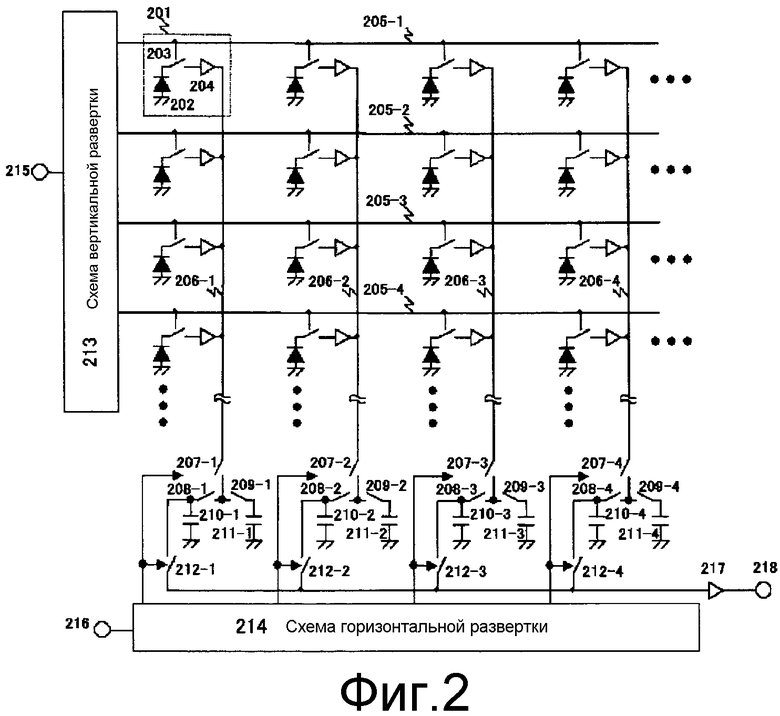
ФИГ. 2 представляет собой коммутационную схему, показывающую детали структуры формирователя сигнала изображения, показанного на ФИГ. 1.
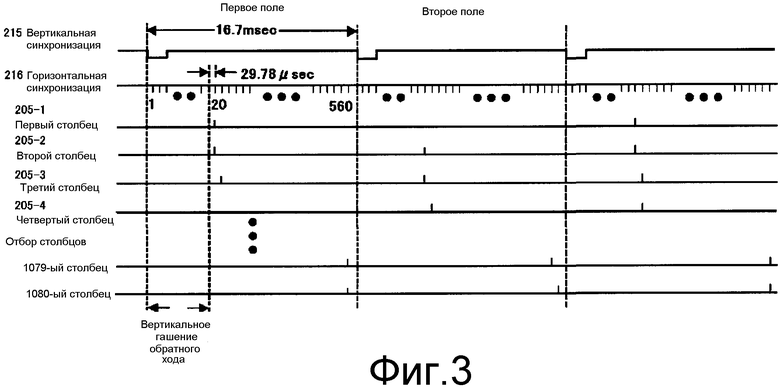
ФИГ. 3 представляет собой временную диаграмму для формирователя сигнала изображения, показанного на ФИГ. 2.
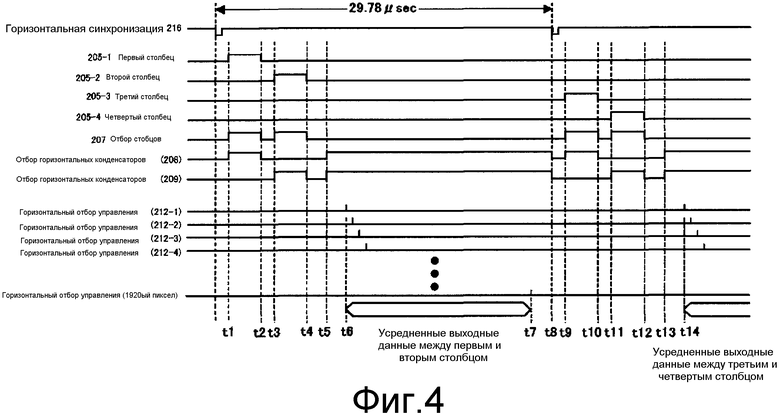
ФИГ. 4 представляет собой временную диаграмму для формирователя сигнала изображения, показанного на ФИГ. 2.
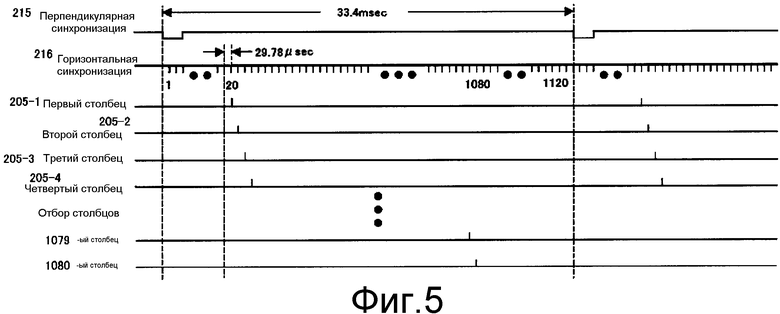
ФИГ. 5 представляет собой временную диаграмму для формирователя сигнала изображения, показанного на ФИГ. 2.
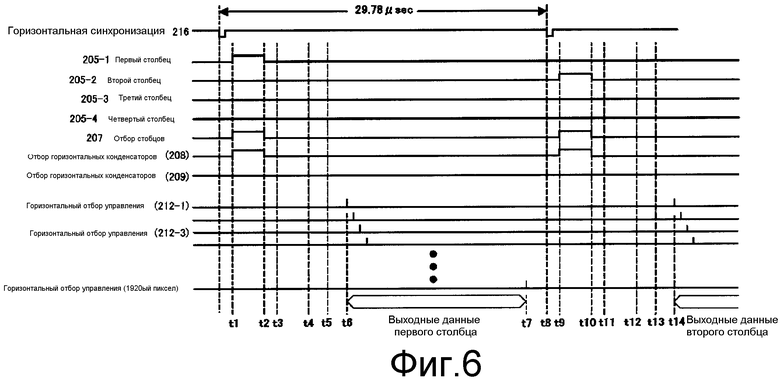
ФИГ. 6 представляет собой временную диаграмму для формирователя сигнала изображения, показанного на ФИГ. 2.
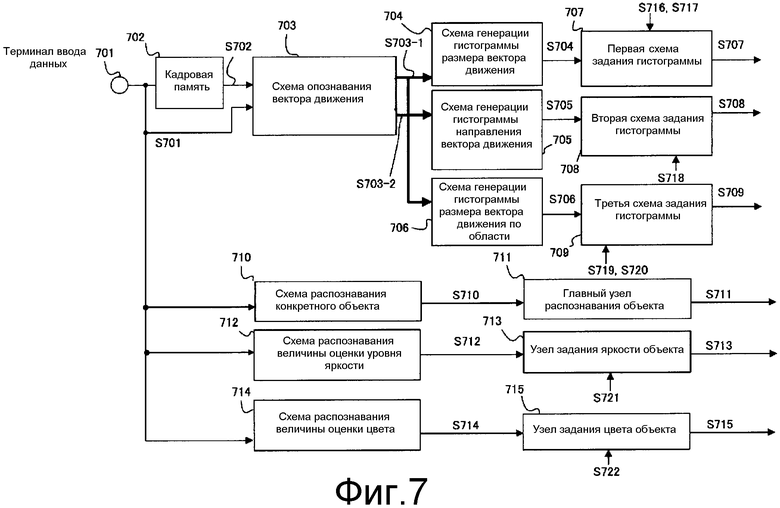
ФИГ. 7 представляет собой структурную схему, показывающую детали структуры генератора величины оценки, показанного на ФИГ. 1.
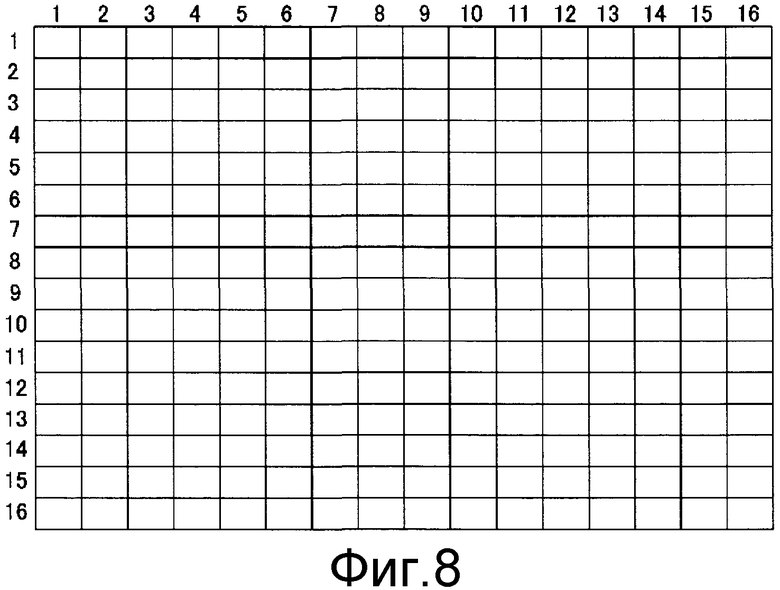
ФИГ. 8 представляет собой демонстрационное разбиение изображения для распознавания вектора движения (первый вариант осуществления).
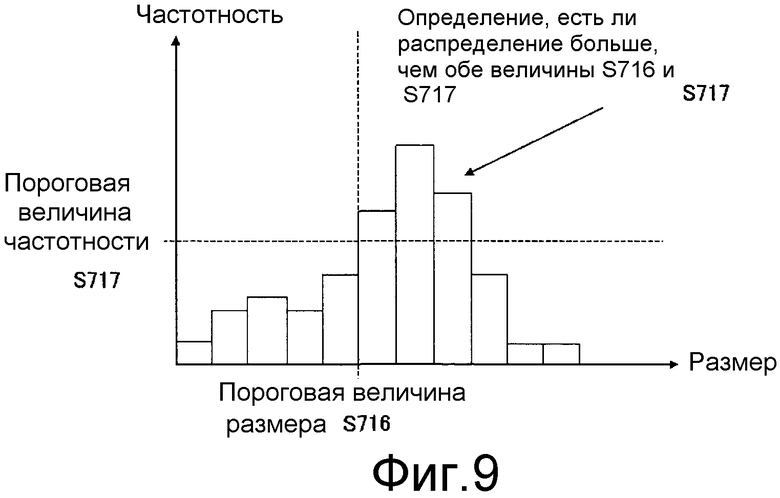
ФИГ. 9 представляет собой демонстрационную гистограмму размера вектора движения (первый вариант осуществления).
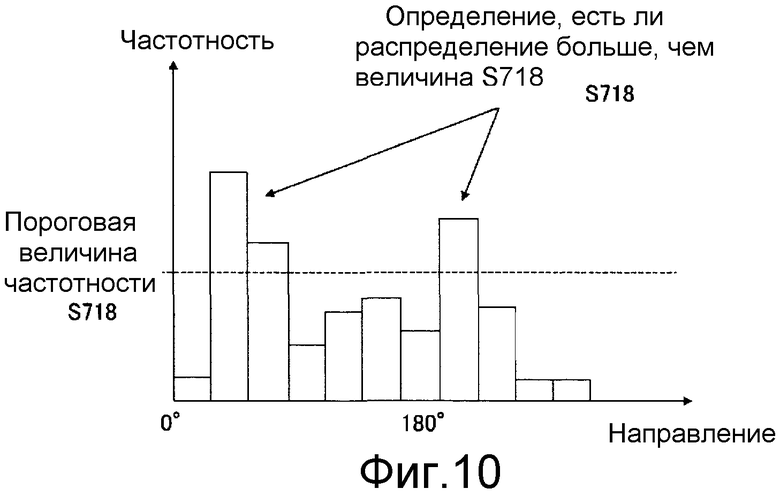
ФИГ. 10 представляет собой демонстрационную гистограмму направления вектора движения (первый вариант осуществления).
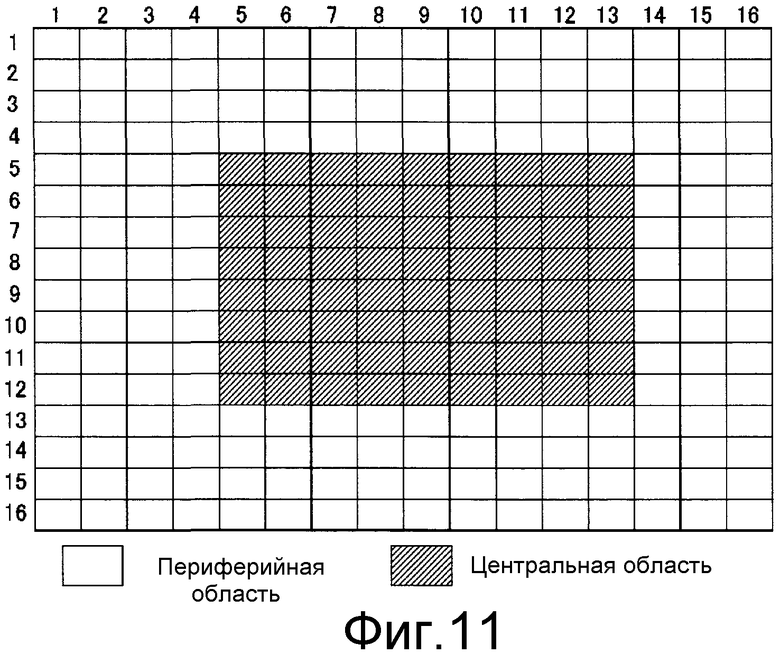
ФИГ. 11 представляет собой демонстрационную гистограмму направления вектора движения по области (первый вариант осуществления).
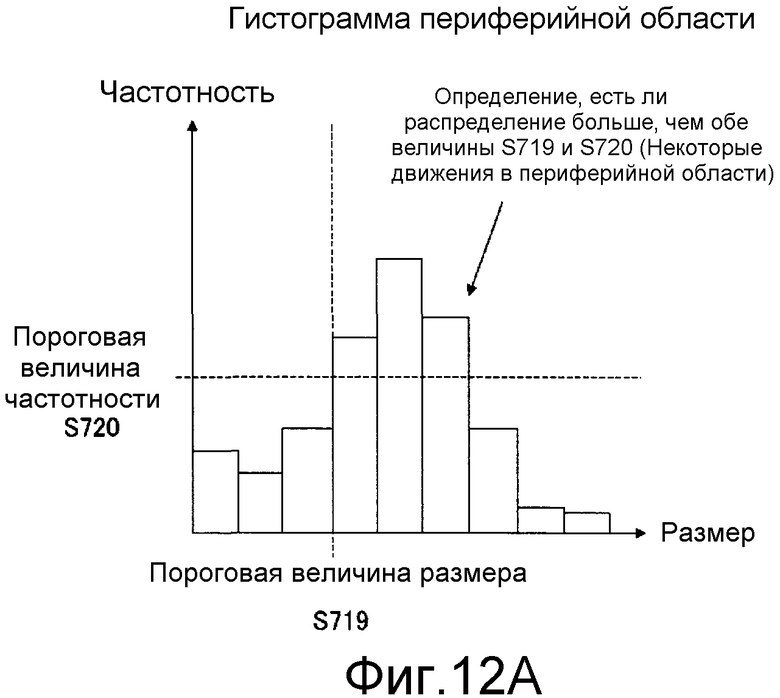
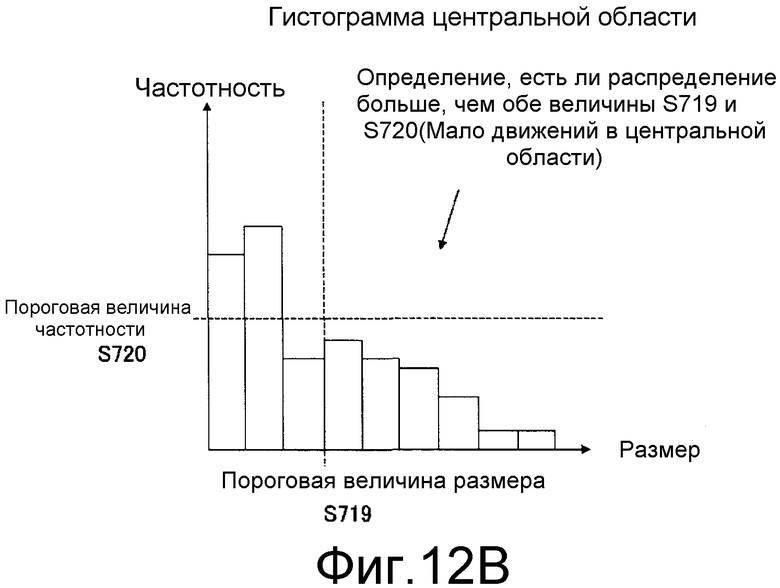
ФИГ. 12 представляет собой пример гистограммы периферийной области и гистограммы центральной области.
ФИГ. 13 представляет собой структурную схему блоков видеокамеры (второй вариант осуществления).
Описание вариантов осуществления изобретения
На сопроводительных чертежах будет дано описание вариантов осуществления в соответствии с данным изобретением.
Вариант осуществления изобретения 1
ФИГ. 1 представляет собой структурную схему блоков видеокамеры (устройства захвата изображения) согласно этому варианту осуществления.
Изображение объекта формируется на формирователе сигнала изображения 2 с использованием объектива 1, и формирователь сигнала изображения 2 фотографирует этот объект и выводит выходной видеосигнал S2. Первый селектор 5 выбирает или выходные данные сигнала S3 вертикальной/горизонтальной (V/H) синхронизации из первой управляющей схемы 3 формирователя сигнала изображения, или выходные данные сигнала S4 V/H синхронизации из второй управляющей схемы 4 формирователя сигнала изображения. Этот селектор 5 поставляет на формирователь сигнала изображения 2, в качестве своего выходного сигнала S5, выбранный им сигнал V/H синхронизации S3 или S4.
Первая управляющая схема 3 формирователя сигнала изображения генерирует сигнал S3 V/H синхронизации, обычно используемый для приведения в действие формирователя сигнала изображения 2 таким образом, чтобы конвертировать изображение объекта, захваченное с использованием чересстрочной развертки формирователя сигнала изображения 2, в электрический сигнал. Вторая управляющая схема 4 формирователя сигнала изображения генерирует сигнал S4 V/H синхронизации, используемый для приведения в действие формирователя сигнала изображения 2 таким образом, чтобы конвертировать изображение объекта, захваченное с использованием прогрессивной развертки формирователя сигнала изображения 2, в электрический сигнал. Этот выходной видеосигнал S2 соответствует чересстрочной развертке, когда на формирователь сигнала изображения 2 поставляется сигнал S3 V/H синхронизации, и прогрессивной развертке, когда на формирователь сигнала изображения 2 поставляется сигнал S4 V/H синхронизации.
Схема 6 обработки сигналов движущегося изображения принимает, в качестве входных сигналов, выходной видеосигнал S2 от формирователя сигнала изображения 2 и выходной сигнал S1 от схемы селекции 14, осуществляет обработку выходного видеосигнала S2 формирователя сигнала изображения 2 в режиме движущегося изображения и выводит, в качестве выходного сигнала S6, сигнал движущегося изображения, на основе чересстрочной развертки.
Схема 7 обработки записи движущегося изображения принимает, в качестве входных сигналов, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения и выходной сигнал S131 от ЦП 13, записывает выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения на носитель записи движущегося изображения 17, если записывается движущееся изображение, и не осуществляет никаких действий, если не записывается движущееся изображение.
Схема 8 обработки выведения на дисплей движущегося изображения принимает, в качестве входного сигнала, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения и предоставляет процесс для выведения выходного сигнала S6 от схемы 6 обработки сигналов движущегося изображения на дисплей 18, подключенный к устройству захвата изображения. Схема 8 обработки выведения на дисплей движущегося изображения осуществляет процесс выведения выходного сигнала S6 от схемы 6 обработки сигналов движущегося изображения на дисплей 18, выбрал ли селектор 5 первую управляющую схему 3 формирователя сигнала изображения или вторую управляющую схему 4 формирователя сигнала изображения.
Схема 9 интерполяции строки развертки принимает, в качестве входного сигнала, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения. Эта схема 9 интерполяции строки развертки интерполирует строку развертки в выходном сигнале S6 схемы 6 обработки сигналов движущегося изображения, в качестве видеосигнала чересстрочной развертки, конвертирует его в видеосигнал прогрессивной развертки и выводит выходной сигнал S9.
Генератор 15 величины оценки принимает входной сигнал, это выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения, и генерирует величину оценки S15, отображающую состояние фотографируемого движущегося изображения, на основе этого сигнала.
Узел 16 оценки изображения принимает, в качестве входного сигнала, значение величины оценки S15 от генератора 15 и генерирует сигнал S16 задания для управления формирователем сигнала изображения, предписывающий задание для управления движущимся изображением и задание для управления неподвижным изображением, на основе этого сигнала. “Задание для управления движущимся изображением” является заданием, что формирователь сигнала изображения 2 следует привести в действие для движущегося изображения, а “задание для управления неподвижным изображением“ является заданием, что формирователь сигнала изображения 2 следует привести в действие для неподвижного изображения. Более конкретно, узел 16 оценки изображения задает (или оценивает), что формирователь сигнала изображения 2 следует привести в действие для движущегося изображения, когда большая часть движения объекта в движущемся изображении распознана как движение в определенном направлении. Кроме того, узел 16 оценки изображения задает, что формирователь сигнала изображения 2 следует привести в действие для неподвижного изображения, когда никакое движение объекта не распознано в движущемся изображении.
Схема 10 обработки сигнала неподвижного изображения принимает, в качестве входного сигнала, выходной сигнал S2 формирователя сигнала изображения 2, осуществляет для этого сигнала обработку в режиме неподвижного изображения и выводит, в качестве выходного сигнала S10, видеосигнал прогрессивной развертки.
Селектор 11 принимает, в качестве входных сигналов, выходной сигнал S9 от схемы 9 интерполяции строки развертки, выходной сигнал S10 от схемы 10 обработки сигнала неподвижного изображения и выходной сигнал S14 схемы селекции 14. Селектор 11 отбирает, на основе выходного сигнала S14 схемы селекции 14, один из двух выходных сигналов: выходного сигнала S9 от схемы 9 интерполяции строки развертки или выходного сигнала S10 от схемы 10 обработки сигналов неподвижного изображения, и выводит выбранный им сигнал в качестве выходного сигнала S11. Более конкретно, селектор 11 отбирает третий видеосигнал схемы 9 интерполяции строки развертки, когда выходной сигнал S14 от схемы селекции 14 равен 0, и второй видеосигнал схемы 10 обработки сигнала неподвижного изображения, когда выходной сигнал S14 от схемы селекции 14 равен 1.
Схема 12 обработки записи неподвижного изображения принимает, в качестве входных сигналов, выходной сигнал S11 от селектора 11 и выходной сигнал S132 от ЦП 13. Схема 12 обработки записи неподвижного изображения записывает выходной сигнал S11 от селектора 11 на носитель 19 записи неподвижного изображения, когда выдается команда записи неподвижного изображения, и не осуществляет никаких действий, если не выдается никакой команды записи неподвижного изображения.
ЦП (контроллер) 13 выводит выходной сигнал S131, предписывающий, следует ли записывать движущееся изображение или ожидается запись движущегося изображения, и выходной сигнал S132, предписывающий, выдается ли команда записать неподвижное изображение. Более конкретно, ЦП 13 выводит выходной сигнал S131, равный 0, когда не записывается никакое движущееся изображение или не ожидается запись никакого движущегося изображения, и выходной сигнал S131, равный 1, когда записывается движущееся изображение или ожидается запись движущегося изображения. ЦП 13 выводит выходной сигнал S132, равный 0, когда не выдается никакая команда записать неподвижное изображение, и выходной сигнал S132, равный 1, когда выдается команда записать неподвижное изображение.
Функциональный узел 20 включает в себя пусковую кнопку, функциональный лимб, множество кнопок, переключатель и рычаг и уведомляет контроллер ЦП 13, что фотограф дал указание захватить и записать движущееся изображение или неподвижное изображение. ЦП 13, на основе уведомления от функционального узла 20, определяет, выдать ли команду захватить или записать движущееся изображение или неподвижное изображение.
Схема селекции 14 принимает, в качестве входных сигналов, выходной сигнал S132 от ЦП 13 и сигнал S16 задания для управления формирователем сигнала изображения и выводит, в качестве выходного сигнала S14, выходной сигнал синхронизации, предоставляемый на формирователь сигнала изображения 2, и выходной сигнал, который задает функционирование схемы 6 обработки сигнала движущегося изображения. Схема селекции 14 выводит выходной сигнал S14, равный 0 (сигнал первого состояния), когда принимает выходной сигнал S16 от узла 16 оценки изображения, который предписывает сигнал задания того, что формирователь сигнала изображения 2 следует привести в действие для движущегося изображения, или когда принимает выходной сигнал S132 от ЦП 13, который предписывает, что выдается команда: в течение съемки движущегося изображения захватить и записать движущееся изображение из состояния ожидания или захватить и записать неподвижное изображение. Схема селекции 14 выводит выходной сигнал S14, равный 1 (сигнал второго состояния), когда принимает выходной сигнал S16 от узла 16 оценки изображения, который предписывает сигнал задания того, что формирователь сигнала изображения 2 следует привести в действие для движущегося изображения, или когда принимает выходной сигнал S132 от ЦП 13, который предписывает, что выдается команда: из состояния ожидания захватить и записать неподвижное изображение.
Селектор 5 отбирает первую управляющую схему 3 формирователя сигнала изображения, когда схема селекции 14 выводит выходной сигнал S14, равный 0 (сигнал первой стадии). Селектор 5 отбирает вторую управляющую схему 4 формирователя сигнала изображения, когда схема селекции 14 выводит выходной сигнал S14, равный 1 (сигнал второй стадии). Эта конфигурация может предотвратить неестественное выходное движущееся изображение, в результате подмешивания неподвижного изображения в движущееся изображение.
ФИГ. 2 представляет собой коммутационную схему, показывающую структуру формирователя сигнала изображения 2, и с целью описания показывает шестнадцать пикселей в четырех вертикальных столбцах и четырех горизонтальных строках, но на самом деле пикселей больше в 1080 вертикальных столбцах и 1920 горизонтальных строках.
На ФИГ. 2 позиционное обозначение 201 обозначает фотоэлектрический узел преобразования пикселей, включающий в себя фотодиод 202, переключатель считывания пикселей 203 и буфер подзарядки преобразования напряжения 204. Формирователь сигнала изображения 2 имеет множество фотоэлектрических элементов преобразования. Позиционные обозначения от 205-1 до 205-4 представляют собой линии отбора столбцов от первого до четвертого столбца, а линии отбора столбцов от пятого до 1080-го столбца опущены. Позиционные обозначения от 206-1 до 206-4 представляют собой линии отбора строк от первой до четвертой строки, а линии отбора строк от пятой до 1920-й строки опущены. Позиционные обозначения от 207-1 до 207-4 представляют собой переключатели отбора строк, а переключатели отбора строк от пятой до 1920-й строки опущены.
Позиционные обозначения от 208-1 до 208-4 представляют собой переключатели отбора первых горизонтальных конденсаторов от первой до четвертой строки, а переключатели отбора от пятой до 1920-й строки опущены. Позиционные обозначения от 209-1 до 209-4 представляют собой переключатели отбора вторых горизонтальных конденсаторов от первой до четвертой строки, а переключатели отбора от пятой до 1920-й строки опущены. Позиционные обозначения от 210-1 до 210-4 представляют собой первые горизонтальные конденсаторы от первой до четвертой строки, а первые горизонтальные конденсаторы от пятой до l920-й строки опущены. Позиционные обозначения от 211-1 до 211-4 представляют собой вторые горизонтальные конденсаторы от первой до четвертой строки, а вторые горизонтальные конденсаторы от пятой до l920-й строки опущены.
Позиционные обозначения от 212-1 до 212-4 представляют собой горизонтальные управляющие переключатели от первой до четвертой строки, а горизонтальные управляющие переключатели от пятой до 1920-й строки опущены. Позиционное обозначение 213 обозначает схему вертикальной развертки (vertical scanning circuit), а позиционное обозначение 214 обозначает схему горизонтальной развертки (horizontal scanning circuit). Позиционное обозначение 215 обозначает входные данные входного сигнала вертикальной синхронизации, который поступает от первой управляющей схемы 3 формирователя сигнала изображения или от второй управляющей схемы 4 формирователя сигнала изображения через селектор 5. Позиционное обозначение 216 обозначает входные данные входного сигнала горизонтальной синхронизации, который выводится от первой управляющей схемы 3 формирователя сигнала изображения или от второй управляющей схемы 4 формирователя сигнала изображения через селектор 5. Позиционное обозначение 217 обозначает буфер выходного сигнала, а позиционное обозначение 218 обозначает выход видеосигнала.
Формирователь сигнала изображения 2 работает, как описано далее, на основе сигнала синхронизации, предоставленного первой управляющей схемой 3 формирователя сигнала изображения или второй управляющей схемой 4 формирователя сигнала изображения через селектор 5. Чертежи 3-6 представляют собой временные диаграммы формирователя сигнала изображения 2.
Когда селектор 5 отбирает первую управляющую схему 3 формирователя сигнала изображения, как это показано на ФИГ. 3, сигнал вертикальной синхронизации предоставляется из входных данных 215 вертикальной синхронизации в период управления полем 16,7 мсекунд=1/59,96 секунд, а сигнал горизонтальной синхронизации предоставляется из входных данных 216 горизонтальной синхронизации в период управления полем 29,78 микросекунд=16,7 мсекунд/560 H. Таким образом, предоставляется вертикальное управление для вертикального периода гашения обратного хода в 20 H и вертикального эффективного периода в 540 Н.
В первом поле, показанном на ФИГ. 3, схема 213 вертикальной развертки сканирует линии отбора столбцов по два столбца за один период вертикальной синхронизации после вертикального периода гашения обратного хода. Другими словами, линии отбора столбцов 205-1 и 205-2 для первого и второго столбца, и линии отбора столбцов 205-3 и 205-4 для третьего и четвертого столбца,… линии отбора столбцов 1079-го и 1080-го столбца сканируются в этих комбинациях.
ФИГ. 4 показывает подробное функционирование линий отбора столбцов и схемы 214 горизонтальной развертки. Когда предъявлен сигнал горизонтальной развертки, в последующий период времени tl-t2 предъявляется линия отбора столбцов 205-1 для первого столбца, и фотоэлектрические сигналы преобразования от 1920-ти фотоэлектрических элементов преобразования, соединенных с линией отбора столбцов 205-1 для первого столбца, одновременно считываются в 1920 сигнальных линий строк.
Как показано на ФИГ. 4, в период времени tl-t2 также одновременно предъявляются переключатель 207 отбора строк и переключатель отбора 208 для первого горизонтального конденсатора. Предположим, что на ФИГ. 4 позиционное обозначение 207 представляет “207-1, 207-2, …,”, позиционное обозначение 208 представляет “208-1, 208-2, …,”, а позиционное обозначение 209 представляет “209-1, 209-2, …”. Фотоэлектрические сигналы преобразования от 1920-ти фотоэлектрических элементов, соединенных с линией отбора столбцов 205-1 для первого столбца, накапливаются в первом горизонтальном конденсаторе (таком как 210-1).
Далее, в период времени t3-t4, предъявляется линия отбора столбцов 205-2 для второго столбца и считываются фотоэлектрические сигналы преобразования от 1920-ти фотоэлектрических элементов преобразования, соединенных с линией отбора столбцов 205-2 для второго столбца. В этот период времени t3-t4 также одновременно предъявляются переключатель 207 отбора строк и переключатель отбора 209 для вторых горизонтальных конденсаторов. Поэтому фотоэлектрические сигналы преобразования от 1920 фотоэлектрических элементов преобразования, соединенных с линией отбора столбцов 205-2 для второго столбца, накапливаются во втором горизонтальном конденсаторе (таком как 211-1).
Затем, в момент времени t5, предъявляются как переключатели отбора 208 для первых горизонтальных конденсаторов, так и переключатели отбора 209 для вторых горизонтальных конденсаторов. В результате этого усредняются фотоэлектрические сигналы преобразования для первого столбца и фотоэлектрические сигналы преобразования для второго столбца, удерживаемые первыми конденсаторами (такими как 210-1) и вторыми горизонтальными конденсаторами (такими как 211-1).
Затем, в период времени t6-t7, последовательно предъявляются переключатели управления горизонтальной разверткой (такие как 212-1) для 1920-ти строк. Таким образом, видеосигнал, созданный посредством вертикального усреднения выходных данных сигналов 1920-ти фотоэлектрических элементов преобразования для первых и вторых столбцов, проходит буфер 217 выходных сигналов, и он представляет собой выходные данные от видеосигнала 218. В момент времени t8 или позднее осуществляется операция следующего периода горизонтальной синхронизации (усредненное считывание фотоэлектрических сигналов преобразования для третьих и четвертых столбцов).
Во втором поле, показанном на ФИГ. 3, схема 213 вертикальной развертки сканирует линии отбора столбцов по два столбца за один период вертикальной синхронизации после вертикального периода гашения обратного хода. Другими словами, сканируются линии отбора столбцов 205-2 и 205-3 для второго и третьего столбца и линии отбора столбцов 205-4 для четвертого и пятого столбца,… линии отбора столбцов для 1080-го и 1081-го столбца (хотя линия отбора столбцов 1,08-го столбца является фиктивной). Эта конфигурация может изменить комбинацию усреднения для двух примыкающих вертикальных линий. Таким образом, у второго поля есть взаимосвязь в чересстрочной развертке с первым полем.
Когда селектор 5 отбирает вторую управляющую схему 4 формирователя сигнала изображения, как показано на ФИГ. 5, предоставляется сигнал вертикальной синхронизации в период времени 33,4 мс = 1/29,97 секунд, что является в два раза более долгим периодом, чем период управления полем из входных данных 215 вертикальной синхронизации, и предоставляется сигнал горизонтальной синхронизации в период времени 29,78 микросекунд = 29,97 мсек/120 H из входных данных 216 горизонтальной синхронизации. Таким образом, предоставляется вертикальное управление для вертикального периода гашения обратного хода 20 H, вертикального эффективного периода 1080 Н и фиктивного периода 20 H.
Схема 213 вертикальной развертки предъявляет каждый столбец линии отбора столбцов в течение одного периода горизонтальной синхронизации после вертикального времени гашения обратного хода и последовательно сканирует линии отбора столбца вплоть до линии отбора столбца для 1080-го столбца. Все пиксели управляются в период этих двух полей.
На ФИГ. 6 показано подробное функционирование линий отбора столбца схемы 214 горизонтальной развертки. Когда предъявляется сигнал горизонтальной синхронизации, в последующий период времени t1-t2, предъявляется линия отбора столбца 205-1 для первого столбца, и одновременно предъявляются переключатели 207 отбора строки и переключатели 208 для первых горизонтальных конденсаторов. Таким образом, фотоэлектрические сигналы преобразования от 1920-ти фотоэлектрических элементов преобразования, соединенных с линией отбора столбцов 205-1 для первого столбца, накапливаются в первых горизонтальных конденсаторах (таких как 210-1).
В последующий период времени t3-t5 не осуществляется никаких действий, потому что ничего не предъявляется.
Затем, в период времени t6-t7, последовательно предъявляются горизонтальные переключатели управления (такие как 212-1) для 1920-ти строк. Таким образом, 1920 фотоэлектрических сигналов преобразования для первого столбца проходят буфер 217 выходного сигнала и представляют собой выходные данные из выхода видеосигнала 218. В момент времени t8 или позднее следует следующий период горизонтальной синхронизации (чтение фотоэлектрических сигналов преобразования для второго столбца). В результате этого генерируются выходные видеоданные как результат прогрессивного чтения всех пикселей.
Как было описано, когда селектор 5 выбирает выходные данные сигнала V/H синхронизации S3 из первой управляющей схемы 3 формирователя сигнала изображения, формирователь сигнала изображения 2 выводит, в качестве выходного сигнала S2, видеосигнал чересстрочной развертки в период поля. С другой стороны, когда выходной сигнал S5 от селектора 5 представляет собой выходные данные сигнала V/H синхронизации S4 из второй управляющей схемы 4 формирователя сигнала изображения, формирователь сигнала изображения 2 выводит, в качестве выходного сигнала S2, видеосигнал прогрессивной развертки в период поля.
Когда выходной сигнал S14 от схемы селекции 14 равен 0, селектор 5 выводит, в качестве выходного сигнала S5, выходные данные сигнала V/H синхронизации S3 из первой управляющей схемы 3 формирователя сигнала изображения, так что формирователь сигнала изображения 2 может быть приведен в действие посредством чересстрочной развертки в период поля. С другой стороны, когда выходной сигнал S14 от схемы селекции 14 равен 1, селектор 5 выводит, в качестве выходного сигнала S5, выходные данные сигнала V/H синхронизации S4 из второй управляющей схемы 4 формирователя сигнала изображения, так что формирователь сигнала изображения может быть приведен в действие посредством прогрессивной развертки в период кадра.
Схема 6 обработки сигналов движущегося изображения принимает, в качестве входных сигналов, выходной видеосигнал S2 от формирователя сигнала изображения 2 и выходной сигнал S14 от схемы селекции 14. Когда выходной сигнал S14 от схемы селекции 14 равен 0, схема 6 обработки сигналов движущегося изображения осуществляет множество процессов в режиме движущегося изображения, таких как апертурная коррекция, гамма-коррекция, регулировка яркости и баланс белого и процесс изменения размера до угла обзора формата для записи движущегося изображения, и выводит результирующий сигнал в качестве выходного сигнала S6.
С другой стороны, когда выходной сигнал S14 схемы отбора 14 равен 1, выходной сигнал от схемы 6 обработки сигнала движущегося изображения имеет силу лишь для схемы 8 обработки вывода на дисплей движущегося изображения. Схема 6 обработки сигнала движущегося изображения осуществляет процесс изменения размера таким образом, чтобы выходной сигнал S2 от формирователя сигнала изображения 2 мог иметь тот же самый угол обзора, как во время обработки движущегося изображения, и выводит выходной сигнал S6 в качестве видеосигнала чересстрочной развертки. Альтернативно схема обработки сигналов движущегося изображения 6 может вывести выходной сигнал S6 как сигнал изображения, указывающего, что записывается неподвижное изображение.
Когда выходной сигнал S131 от ЦП 13 равен 1, схема 7 обработки записи движущегося изображения записывает выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения на носитель для записи движущегося изображения, потому что записывается движущееся изображение. С другой стороны, когда выходной сигнал S131 от ЦП 13 равен 0, схема 7 обработки данных записи движущегося изображения не осуществляет никаких процессов, потому что не записывается никакое движущееся изображение.
Схема 9 интерполяции строки развертки 9 осуществляет процесс интерполяции строки развертки чересстрочной развертки и выводит, в качестве выходного сигнала S9, видеосигнал прогрессивной развертки. Например, процесс интерполяции строки развертки использует полевую память, чтобы задержать входной сигнал на одно поле, осуществляет задание движения и задание градиента, на основе информации текущего поля и одного предыдущего поля, и генерирует сигнал интерполяции строки. Выводится видеосигнал прогрессивной развертки посредством выведения этого интерполированного сигнала строки и входного сигнала. Этот процесс интерполяции строки развертки является одним из примеров, и сигнал интерполяции может генерироваться с использованием некоторого множества полей.
Схема 10 обработки сигналов неподвижного изображения осуществляет множество процессов в режиме неподвижного изображения, таких как апертурная коррекция, гамма-коррекция, регулировка яркости и баланс белого, и выводит результирующий сигнал в качестве выходного сигнала S10.
Селектор 11 отбирает один из выходных сигналов S9 от схемы 9 интерполяции строки развертки и выходного сигнала S10 от схемы 10 обработки сигналов неподвижного изображения и выводит выбранный сигнал в качестве выходного сигнал S11. Когда выходной сигнал S14 от схемы селекции 14 равен 0, селектор 11 выводит, в качестве выходного сигнала S11, выходной сигнал S9 от схемы 9 интерполяции строки развертки. С другой стороны, когда выходной сигнал S14 от схемы селекции 14 равен 1, селектор 11 выводит, в качестве выходного сигнала S11, выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения.
Схема 12 обработки записи неподвижного изображения принимает, в качестве входных сигналов, выходной сигнал S11 от селектора 11 и выходной сигнал S132 от ЦП 13. Выходной сигнал S132 от ЦП 13, равный 1, означает, что выдается команда записи неподвижного изображения, и, таким образом, схема 12 обработки записи неподвижного изображения записывает выходной сигнал S11 от селектора 11 на носитель для записи неподвижного изображения. Выходной сигнал S132 от ЦП 13, равный 0, означает, что никакая команда записи неподвижного изображения не выдается, и, таким образом, схема 12 обработки записи неподвижного изображения не осуществляет никаких процессов.
Генератор 15 величины оценки генерирует величину оценки S15 предписывающую состояние фотографируемого движущегося изображения. ФИГ. 7 представляет собой структурную схему генератора 15 величины оценки. На ФИГ. 7 позиционное обозначение 701 обозначает терминал ввода данных, который принимает выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения. Позиционное обозначение 702 обозначает кадровую память. Позиционное обозначение 703 обозначает схему опознавания вектора движения. Позиционное обозначение 704 представляет собой схему генерации гистограммы размера вектора движения. Ссылка 705 обозначает схему генерации гистограммы направления вектора движения.
Позиционное обозначение 706 обозначает схему генерации гистограммы размера вектора движения по области. Позиционное обозначение 707 обозначает первую схему задания гистограммы. Позиционное обозначение 708 обозначает вторую схему задания гистограммы. Позиционное обозначение 709 обозначает третью схему задания гистограммы. Позиционное обозначение 710 представляет собой схему распознавания конкретного объекта. Позиционное обозначение 711 представляет собой главный узел распознавания объекта. Позиционное обозначение 712 обозначает схему для распознавания величины оценки уровня яркости. Позиционное обозначение 713 обозначает узел задания яркости объекта. Позиционное обозначение 714 представляет собой схему распознавания величины оценки цвета. Позиционное обозначение 715 обозначает узел задания цвета объекта.
Теперь будет дано описания функционирования генератора 15 величины оценки.
Видеосигнал S6, который подвергся обработке сигналов в режиме движущегося изображения и был введен из терминала 701 ввода данных, вводится в память кадра 702, в схему 703 распознавания вектора движения, в схему 710 распознавания конкретного объекта, в схему 712 распознавания величины оценки уровня яркости и в схему 714 распознавания величины оценки цвета.
Схема 703 распознавания вектора движения вычисляет вектор движения, на основе видеосигнала S701 и видеосигнала S702, которые были задержаны на один кадр памятью кадра 702. Вектор движения вычисляется для каждого из малых 256 блоков, сделанных посредством разбиения угла обзора съемки на 16 частей в ширину и на 16 частей в длину, как показано на ФИГ. 8, и подразделяется на размер и направление. В результате данные о размере S703-1 и данные о направлении вектора движения S703-2 генерируются для каждого из 256 векторов движения.
Данные о размере S703-1 вектора движения вводятся в схему 704 генерации гистограммы размера вектора движения и схему 706 генерации гистограммы размера вектора движения по области. Данные о направлении S703-2 вектора движения вводятся в схему 705 генерации гистограммы направления вектора движения.
Схема 704 генерации гистограммы размера вектора движения генерирует данные S704 гистограммы вектора движения, на основе данных о размере S703-1 для 256-ти векторов движения, как показано на ФИГ. 9, и вводит это в первую схему 707 задания гистограммы.
Первая схема 707 задания гистограммы также принимает первую пороговую величину S716 распознавания размера движения и первую пороговую величину S717 частотности размера движения. Первая схема 707 задания гистограммы задает, как показано на ФИГ. 9, имеется ли заранее заданное количество блоков или больше, в каждом из которых распознается движение с заранее заданным размером, и выводит первые выходные данные S707 задания движения. В ситуации, когда предъявляются первые выходные данные S707 задания движения, задается, что объект фотографируемого движущегося изображения двигается с заданным заранее размером по заданной заранее области.
Схема 705 генерации гистограммы направления вектора движения генерирует данные S705 гистограммы направления вектора движения, на основе данных о направлении S703-2 для 256-ти векторов движения, как показано на ФИГ. 10, и вводит это во вторую схему 708 задания гистограммы.
Вторая схема 708 задания гистограммы также принимает пороговую величину S718 частотности направления движения. Вторая схема 708 задания гистограммы задает, как показано на ФИГ. 10, имеется ли заранее заданное количество блоков или больше, в каждом из которых распознано движение в заранее заданном направлении, и выводит вторые выходные данные S708 задания движения. В ситуации, когда задаются вторые выходные данные S708 задания движения, задается, что объект фотографируемого движущегося изображения заметно двигается в конкретном направлении.
Схема 706 генерации гистограммы размера вектора движения по области принимает данные о размере S703-1 для 256-ти векторов движения. Как показано на ФИГ. 11, схема 706 генерации гистограммы размера вектора движения по области разбивает 256 векторов движения на часть в центре экрана и часть на периферии экрана, генерирует выходные данные S706 гистограммы размера вектора движения S706 для каждой области и вводит это в третью схему 709 задания гистограммы.
Третья схема 709 задания гистограммы также принимает вторую пороговую величину S719 распознавания размера движения и вторую пороговую величину S720 частотности размера движения. Третья схема задания гистограммы 709 задает, как показано на ФИГ. 12, имеется ли заранее заданное количество блоков или больше, в каждом из которых распознается движение, имеющее заранее заданный размер, для каждой части экрана, центральной и периферийной, и выводит третьи выходные данные S709 задания движения, когда задается, что движение существует только в периферийной части экрана.
ФИГ. 12A показывает гистограмму периферийной области, а ФИГ. 12B показывает гистограмму центральной области. В ситуации, когда предъявляются третьи выходные данные S709 задания движения, задается, что объект фотографируемого движущегося изображения сравнительно стационарный, имеется движение на заднем плане и предмет панорамируется.
Схема 710 обнаружения конкретного объекта распознает, на основе входного видеосигнала S701, причем в фотографируемом движущемся изображении находится объект, имеющий конкретный признак, такой как человеческое лицо, и выводит информацию S710 о множестве фрагментов положений объекта. Узел 711 главного задания объекта опознает один конкретный объект, на основе информации S710 о множестве положений объекта, и выводит главную информацию S711 о положении объекта. Может быть определено, существует ли конкретный объект в фотографируемом движущемся изображении, посредством обращения к главной информации S711 о положении объекта.
Схема 712 распознавания величины оценки уровня яркости генерирует величину S712 оценки уровня яркости на основе, например, видеосигнала S701, посредством извлечения сигнала яркости, разбивая экран на множество блоков для сигнала яркости фотографируемого движущегося изображения и генерируя интегральную величину сигнала яркости для каждого блока из этого множества. Величина S712 оценки уровня яркости и задание S721 яркости объекта являются вводными данными в узел 713 задания яркости.
Узел 713 задания яркости объекта, например, сравнивает величину оценки яркости в центре экрана с уровнем задания S721, и выводит результат S713, задание уровня яркости объекта. Обращаясь к результату S713 задания уровня яркости объекта, может быть задана величина яркости объекта относительно задания уровня яркости объекта S721.
Схема 714 распознавания величины оценки цвета генерирует конкретную величину S714 оценки цвета, на основе видеосигнала S701, например, извлекая сигнал цветовых различий, посредством разбиения экрана на множество блоков для сигнала цветовых различий фотографируемого движущегося изображения, посредством интегрирования только сигналов цветовых различий, имеющие конкретные оценки для каждого блока из этого множества. Конкретная величина S714 оценки цвета S714 и задания S722 уровня цвета объекта, S722 вводятся в узел задания цвета объекта 715. Этот узел 715 определения цвета объекта задает, например, концентрируется ли конкретный цвет в центральной части экрана, и выводит результат S715 задания уровня цвета объекта. Обращаясь к результату S715 задания уровня цвета объекта, задается, содержится ли цвет объекта в конкретном диапазоне сигналов цветовых различий.
Как описано выше, величина оценки изображения S15 от генератора 15 величины оценки изображения включает в себя, с первых по третьи, выходные данные S707, S708 и S709 задания движения, главную информацию о положении объекта S711, результат задания уровня яркости объекта S713 и результат задания уровня цвета объекта S715. В результате этого величина оценки изображения S15 предписывает одну из информаций о движении объекта, информацию, предписывающую, существует ли конкретный участок, информацию, идентифицирующую конкретный объект среди множества объектов, информацию о яркости объекта и информацию о цвете объекта.
Узел 16 оценки изображения предоставляет задание управления движущимся изображением и задание управления неподвижным изображением на основе величины оценки S15, как это описано позднее. Первоначально узел 16 оценки изображения генерирует сигнал S задания управления движущимся изображением на основе первых выходных данных S707 задания движения и вторых выходных данных S708 задания движения, когда распознается большое движение, имеющее заданный заранее размер или больший в заданном заранее направлении в фотографируемом движущемся изображении. Эта конфигурация может предотвратить неестественность большого перемещения объекта, которое, вероятно, будет распознано визуально.
Кроме того, узел 16 оценки изображения генерирует, на основе третьих выходных данных S709 задания движения, сигнал задания S16, который предписывает, что формирователь сигнала изображения 2 следует привести в действие для неподвижного изображения, когда задается, что фотограф преднамеренно панорамирует (когда в движущемся изображении в периферийной части есть большее движение, чем в центральной части). Кроме того, узел 16 оценки изображения генерирует, на основе главной информации S711 о положении объекта, сигнал задания 816, который предписывает, что формирователь сигнала изображения 2 следует привести в действие для неподвижного изображения, в предположении, что фотограф захватывает требуемый предмет, когда задается, чтобы конкретный участок, такой как лицо объекта, уходит в фотографируемом движущемся изображении. Таким образом, даже когда имеется большое и неестественное перемещение объекта, которое, вероятно, будет распознано визуально, это соответствует намерениям фотографа.
Кроме того, когда узел 16 оценки изображения задает, на основе результата S713 задания уровня яркости предметов, что яркость объекта ниже, чем пороговая величина, узел 16 оценки изображения генерирует сигнал S16 задания управления неподвижным изображением. Кроме того, когда узел 16 оценки изображения задает, на основе результата задания уровня цвета объекта S715, что цвет объекта приближен к желтому (или в пределах конкретного диапазона цветовых различий, который имеет желтый цвет в центре), узел формирования изображения 16 генерирует сигнал S16 задания управления движущимся изображением. Таким образом, узел 16 оценки изображения может изменить средства управления над неестественностью, в зависимости от уровня, на котором большое перемещение объекта распознается визуально.
В некоторых случаях узел 16 оценки изображения не может единственным образом определить, задает ли сигнал задания S16 управление движущимся изображением или управление неподвижным изображением, на основе S707, S708, S709, S711, S713 и S715, в величине оценки S15. В этих случаях узел 16 оценки изображения может использовать заранее заданный приоритетный заказ, мажоритарный принцип, известный многомерный результат анализа, известный результат задания нейронной сети и т.д.
Схема селекции 14 принимает, в качестве входных сигналов, выходной сигнал S132 от ЦП 13 и сигнал задания S16, обычно используемых для приведения в действие формирователя сигнала изображения. Когда выходной сигнал S132 от ЦП 13 равен 1, а сигнал задания S16 задает управление движущимся изображением, выходной сигнал S14 от схемы селектора 14 становится равным 0, и формирователем сигнала изображения 2 управляют при полевом управлении движущимся изображением чересстрочной развертки. Схема 6 обработки сигналов движущегося изображения предоставляет полевую обработку движущегося изображения посредством чересстрочной развертки, и полевое движущееся изображение поставляется на схему 7 обработки записи движущегося изображения и схему 8 обработки отображения на дисплее движущегося изображения. Кроме того, селектор 11 передает выходной сигнал S9 от схемы 9 интерполяции строки развертки на схему 12 обработки записи неподвижного изображения.
Когда выходной сигнал S132 от ЦП 13 равен 1 и сигнал задания S16, обычно используемый для приведения в действие формирователя сигнала изображения, задает управление неподвижным изображением, выходной сигнал S14 от схемы селекции 14 становится равным 1, и формирователь сигнала изображения 2 управляется под управлением неподвижного изображения прогрессивной развертки. Выходной сигнал S6 от схемы 6 обработки сигнала движущегося изображения имеет силу только относительно схемы 8 обработки выведения на дисплей движущегося изображения, выходной сигнал S2 от формирователя сигнала изображения 2 изменяется в размере так, чтобы у него был тот же угол обзора, как во время обработки движущегося изображения, и выводится в качестве видеосигнала чересстрочной развертки от формирователя сигнала изображения. Альтернативно в качестве выходного сигнала S6 может быть выведено на дисплей изображение, предписывающее, что записывается неподвижное изображение. Схема 10 обработки сигнала неподвижного изображения предоставляет обработку неподвижного изображения посредством прогрессивной развертки, а селектор 11 передает выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения на схему 12 обработки записи неподвижного изображения.
Вариант осуществления изобретения 2
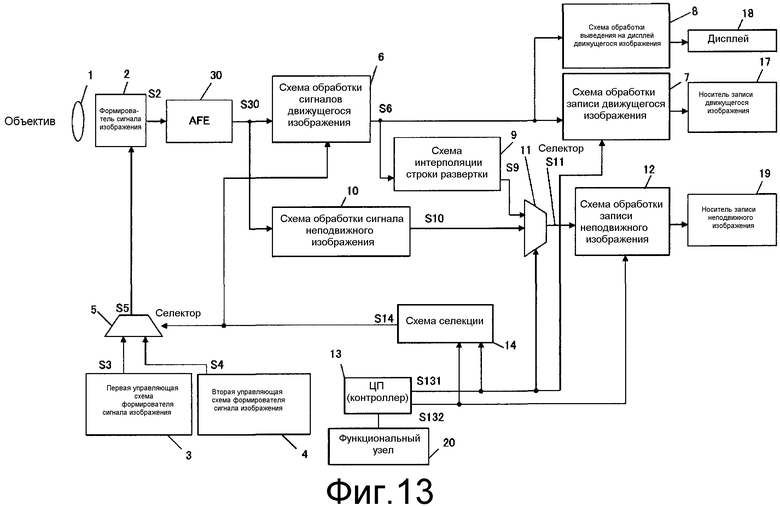
ФИГ. 13 является структурной схемой блоков видеокамеры (устройство захвата изображения) согласно второму варианту осуществления изобретения. Те элементы на ФИГ. 13, которые являются теми же самыми, что и соответствующие элементы на ФИГ. 1, обозначаются одними и теми же позиционными обозначениями, и повторное описание будет опущено. Так как в этом воплощении изобретения структура и временная диаграмма формирователя сигнала изображения 2 аналогичны таковым на чертежах 2-6 в первом воплощении изобретения, их описание будет опущено.
Изображение объекта формируется на формирователе сигнала изображения 2 через объектив 1, и формирователь сигнала изображения 2 фотографирует предмет и выводит выходной видеосигнал S2. Первый селектор 5 выбирает или выходные данные сигнала S3 вертикальной/горизонтальной (V/H) синхронизации из первой управляющей схемы 3 формирователя сигнала изображения или выходной сигнал S4 V/H синхронизации из второй управляющей схемы 4 формирователя сигнала изображения. Этот селектор 5 поставляет на формирователь сигнала изображения 2 свой выходной сигнал S5, это выбранный им сигнал V/H синхронизации S3 или S4.
Первая управляющая схема 3 формирователя сигнала изображения генерирует сигнал S3 V/H синхронизации, сконфигурированный для приведения в действие формирователя сигнала изображения 2 таким образом, чтобы конвертировать изображение объекта, захваченное с использованием чересстрочной развертки формирователя сигнала изображения 2, в электрический сигнал. Вторая управляющая схема 4 формирователя сигнала изображения генерирует сигнал S4 V/H синхронизации, сконфигурированный для приведения в действие формирователя сигнала изображения 2 таким образом, чтобы конвертировать изображение объекта, захваченное с использованием прогрессивной развертки формирователя сигнала изображения 2, в электрический сигнал. Этот выходной видеосигнал S2 соответствует чересстрочной развертке, когда на формирователь сигнала изображения 2 поставляется сигнал S3 V/H синхронизации, и прогрессивной развертке, когда на формирователь сигнала изображения 2 поставляется сигнал S4 V/H синхронизации.
Позиционное обозначение 30 обозначает аналоговый входной блок (analog front end, AFE), который включает в себя схему коррелированной двойной выборки (correlated double sampling, CDS) и схему аналогово-цифрового преобразования (analog-to-digital, A/D). Схема CDS является схемой, сконфигурированной таким образом, чтобы удалить шум восстановления, который преобладает в шумах, содержащихся в выходном видеосигнале S2 от формирователя сигнала изображения 2. Схема преобразования A/D является схемой, сконфигурированной таким образом, чтобы конвертировать аналоговое изображение в цифровое изображение. Схема AFE 30 является схемой, сконфигурированной таким образом, чтобы преобразовать аналоговый сигнал в цифровой сигнал, который обрабатывается схемой 6 обработки сигналов движущегося изображения.
Схема 6 обработки сигналов движения принимает, в качестве входных сигналов, выходной сигнал S30 от AFE 30 и выходной сигнал S14 от схемы селекции 14, осуществляет обработку выходного сигнала S30 от AFE 30 в режиме движущегося изображения и выводит, в качестве выходного сигнала S6, сигнал движущегося изображения на основе чересстрочной развертки.
Схема 7 обработки записи движущегося изображения принимает, в качестве входных сигналов, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения и выходной сигнал S131 от ЦП 13, записывает выходной сигнал S6 от схемы 6 обработки сигнала движущегося изображения на носитель записи движущегося изображения 17, если записывается движущееся изображение, и не осуществляет никаких действий, если не записывается движущееся изображение.
Схема 8 обработки вывода на дисплей движущегося изображения принимает, в качестве входного сигнала, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения, и выводит выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения на дисплей 18, подключенный к устройству захвата изображения. Схема 8 обработки отображения на дисплее движущегося изображения выводит выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения на дисплей 18, выбрал ли селектор 5 первую управляющую схему 3 формирователя сигнала изображения или вторую управляющую схему 4 формирователя сигнала изображения.
Схема 9 интерполяции строки развертки принимает, в качестве входного сигнала, выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения. Эта схема 9 интерполяции строки развертки интерполирует строку развертки в выходном сигнале S6 схемы обработки сигналов движущегося изображения 6, в качестве видеосигнала чересстрочной развертки, конвертирует его в видеосигнал прогрессивной развертки и выводит выходной сигнал S9.
Схема 10 обработки сигнала неподвижного изображения принимает, в качестве входного сигнала, выходной сигнал S20 от AFE 30, осуществляет для этого сигнала обработку в режиме неподвижного изображения и выводит выходной сигнал S10 как видеосигнал на основе прогрессивной развертки.
Селектор 11 принимает, в качестве входных сигналов, выходной сигнал S9 от схемы 9 интерполяции строки развертки, выходной сигнал S10 от схемы 10 обработки сигнала неподвижного изображения и выходной сигнал S14 схемы селекции 14. Селектор 11 отбирает, на основе оценки выходного сигнала S10 от ЦП 13, или выходной сигнал S9 от схемы 9 интерполяции строки развертки, или выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения, и выводит выбранный им сигнал в качестве выходного сигнала S11. Более конкретно, селектор 11 отбирает третий видеосигнал схемы 9 интерполяции строки развертки, когда выходной сигнал S14 от схемы селекции 14 равен 0, и выбирает второй видеосигнал схемы 10 обработки сигнала неподвижного изображения, когда выходной сигнал S14 от схемы селекции 14 равен 1.
Схема 12 обработки записи неподвижного изображения принимает, в качестве входных сигналов, выходной сигнал S11 от селектора 11 и выходной сигнал S132 от ЦП 13. Схема 12 обработки записи неподвижного изображения записывает выходной сигнал S11 от селектора 11 на носитель 19 записи неподвижного изображения, когда выдается команда записи неподвижного изображения, и не осуществляет никаких действий, когда не выдается команда записи неподвижного изображения.
ЦП (контроллер) 13 выводит (первое указание) выходной сигнал S131, предписывающий, следует ли записать движущееся изображение или ожидается запись движущегося изображения, и выходной сигнал (второе указание) S132, предписывающий, выдается ли команда записать неподвижное изображение. Более конкретно, ЦП 13 выводит выходной сигнал S131, равный 0, когда не записывается движущееся изображение или не ожидается запись движущегося изображения, и выходной сигнал S131, равный 1, когда записывается движущееся изображение или ожидается запись движущегося изображения. ЦП 13 выводит выходной сигнал S132, равный 0, когда не выдается команда записи неподвижного изображения, и выходной сигнал S132, равный 1, когда выдается команда записи неподвижного изображения.
Функциональный узел 20 включает в себя пусковую кнопку, функциональный лимб, множество кнопок, переключатель и рычаг, и уведомляет контроллер ЦП 13, что фотограф дал указание захватить и записать движущееся или неподвижное изображение. ЦП 13, на основе уведомления от функционального узла 20, определяет, выдать ли команду захватить или записать движущееся или неподвижное изображение.
Схема селекции 14 принимает, в качестве входных сигналов, выходные сигналы S131 и S132 от ЦП 13, и выводит сигнал синхронизации, который следует предоставить формирователю сигнала изображения 2 и выходной сигнал S14, который задает функционирование схемы 6 обработки сигнала движущегося изображения. Когда выходной сигнал S131 от ЦП 13 равен 1, предписывая, что на выходе записывается движущееся изображение или ожидается запись движущегося изображения, а выходной сигнал S132 равен 1, предписывая, что на выходе команда записи неподвижного изображения, это понимается так, что предписывается команда записи неподвижного изображения, когда записывается движущееся изображение или ожидается запись движущегося изображения. Когда выходной сигнал S131 от ЦП 13 равен 1, предписывая, что на выходе записывается движущееся изображение или ожидается запись движущегося изображения, а выходной сигнал S132 равен 0, предписывая, что на выходе нет команды записи неподвижного изображения, это понимается так, что записывается движущееся изображение или ожидается запись движущегося изображения.
В любом из случаев схема селекции 14 выводит в качестве выходного сигнала S14 (первое состояние) сигнал 0, предписывая одно из состояний, где ожидается съемка движущегося изображения, фотографируется движущееся изображение, записывается неподвижное изображение, когда ожидается съемка движущегося изображения, или записывается неподвижное изображение, в то время как фотографируется движущееся изображение.
Когда выходной сигнал S131 от ЦП 13 равен 0, предписывая, что на выходе не записывается движущееся изображение или не ожидается записи движущегося изображения, а выходной сигнал S132 равен 1, предписывая, что на выходе команда записи неподвижного изображения, это понимается так, что выдается команда записи неподвижного изображения, когда не записывается движущееся изображение или не ожидается запись движущегося изображения. В этом случае схема селекции 14 выдает, в качестве выходного сигнала S14 (второе состояние) сигнал 1, предписывая запись неподвижного изображения.
Селектор 5 отбирает первую управляющую схему 3 формирователя сигнала изображения, когда схема селекции 14 выводит, в качестве выходного сигнала S14, сигнал первого состояния 0. Кроме того, этот селектор отбирает вторую управляющую схему 4 формирователя сигнала изображения, когда схема селекции 14 выводит, в качестве выходного сигнала S14, сигнал второго состояния 1. Эта конфигурация может предотвратить подмешивание неподвижного изображения в движущееся изображение и неестественность изображения выхода.
Когда выходной сигнал S14 от схемы селекции 14 равен 0, селектор 5 выводит, в качестве выходного сигнала S5, выходной сигнал V/H синхронизации S3 первой управляющей схемы 3 формирователя сигнала изображения, так что формирователь сигнала изображения может быть приведен в действие посредством чересстрочной развертки в период поля. С другой стороны, когда выходной сигнал S14 от схемы селекции 14 равен 1, селектор 5 выводит, в качестве выходного сигнала S5, выходной сигнал V/H синхронизации S4 второй управляющей схемы 4 формирователя сигнала изображения, так что формирователь сигнала изображения может быть приведен в действие посредством прогрессивной развертки в период кадра.
Схема 6 обработки сигналов движущегося изображения принимает, в качестве входных сигналов, выходной видеосигнал S30 от AFE 30 и выходной сигнал S14 от схемы селекции 14. Когда выходной сигнал S14 от схемы селекции 14 равен 0, схема 6 обработки сигналов движущегося изображения осуществляет множество процессов в режиме движущегося изображения, таких как апертурная коррекция, гамма-коррекция, регулировка яркости, баланс белого и процесс изменения размера до угла обзора формата для записи движущегося изображения, и выводит выходной сигнал S6. С другой стороны, когда выходной сигнал S14 от схемы отбора 14 равен 1, выходной сигнал от схемы 6 обработки сигнала движущегося изображения имеет силу лишь для схемы 8 обработки выведения на дисплей движущегося изображения. Схема 6 обработки сигнала движущегося изображения осуществляет процесс изменения размера для выходного сигнала S30 от AFE таким образом, чтобы он мог иметь тот же самый угол обзора, как во время обработки движущегося изображения, и выводит выходной сигнал S6 в качестве видеосигнала чересстрочной развертки. Альтернативно схема 6 обработки сигналов движущегося изображения может вывести выходной сигнал S6, как сигнал изображения, указывающего, что записывается неподвижное изображение.
Когда выходной сигнал S131 от ЦП 13 равен 1, схема 7 обработки записи движущегося изображения записывает выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения на носитель для записи движущегося изображения, потому что записывается движущееся изображение. Когда выходной сигнал S131 от ЦП 13 равен 0, схема 7 обработки данных записи движущегося изображения не осуществляет никаких процессов, потому что не записывается никакое движущееся изображение.
Схема 9 интерполяции строки развертки 9 осуществляет процесс интерполяции строки развертки в режиме чересстрочной развертки, и выводит, в качестве выходного сигнала S9, видеосигнал прогрессивной развертки. Например, процесс интерполяции строки развертки использует полевую память, сконфигурированную для задержки входного сигнала на одно поле, осуществляет задание движения и задание градиента, на основе информации текущего поля и одного предыдущего поля, и генерирует сигнал интерполяции строки. Выводится видеосигнал прогрессивной развертки, посредством выведения этого входного сигнала и сигнала интерполяции строки. Этот процесс интерполяции строки развертки является демонстрационным, и сигнал интерполяции может генерироваться посредством использования некоторого множества полей.
Селектор 11 отбирает или выходной сигнал S9 от схемы 9 интерполяции строки развертки, или выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения и выводит выбранный им сигнал в качестве выходного сигнала S11. Когда выходной сигнал S131 от ЦП 13 равен 1, селектор 11 выводит, в качестве выходного сигнала S11, выходной сигнал S9 от схемы 9 интерполяции строки развертки. С другой стороны, когда выходной сигнал S131 от ЦП 13 равен 0, селектор 11 выводит, в качестве выходного сигнала S11, выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения.
Схема 12 обработки записи неподвижного изображения принимает, в качестве входных сигналов, выходной сигнал S11 от селектора 11 и выходной сигнал S132 от ЦП 13. Выходной сигнал S132 от ЦП 13, равный 1, означает, что выдается команда записи неподвижного изображения, и, таким образом, схема 12 обработки записи неподвижного изображения записывает выходной сигнал S11 от селектора 11 на носитель для записи неподвижного изображения. Выходной сигнал S132 от ЦП 13, равный 0, означает, что никакая команда записи неподвижного изображения не выдается, и, таким образом, схема 12 обработки записи неподвижного изображения не осуществляет никаких процессов.
Схема селекции 14 принимает в качестве входных сигналов выходные данные S131 и S132 от ЦП 13. Когда выходной сигнал S131 от ЦП 13 равен 0, а выходной сигнал S132 от ЦП 13 равен 1, выходной сигнал S14 от схемы селекции 14 становится равным 1, и формирователь сигнала изображения 2 управляется под управлением неподвижного изображения прогрессивной развертки. Выходной сигнал S6 от схемы 6 обработки сигналов движущегося изображения имеет силу лишь для схемы 8 обработки вывода на дисплей движущегося изображения, которая осуществляет процесс изменения размера для выходного сигнала S30 от AFE 30 таким образом, чтобы у этого сигнала мог быть тот же самый угол обзора, как во время обработки движущихся изображений, и выводится, в качестве выходного сигнала S6, видеосигнал чересстрочной развертки. Альтернативно, в качестве выходного сигнала S6, может быть выведено изображение, которое указывает, что записывается неподвижное изображение. Схема 10 обработки сигналов неподвижного изображения осуществляет обработку изображения для неподвижного изображения прогрессивной развертки, и селектор 11 передает выходной сигнал S10 от схемы 10 обработки сигналов неподвижного изображения к схеме 12 обработки записи неподвижного изображения.
В других случаях выходной сигнал S14 от схемы селекции 14 становится равным 0, и формирователь сигнала изображения 2 управляется под полевым управлением движущегося изображения с чересстрочной разверткой. Кроме того, схема 6 обработки сигналов движущегося изображения осуществляет полевую обработку движущегося изображения с чересстрочной разверткой, и схема 7 обработки записи движущегося изображения и схема 8 вывода на дисплей движущегося изображения обеспечиваются полевыми движущимися изображениями. Альтернативно селектор 11 передает выходной сигнал S9 от схемы 9 интерполяции строки развертки на схему 12 обработки записи неподвижных изображений.
Согласно этому варианту осуществления изобретения становятся простыми как съемка движущегося изображения, так и съемка неподвижного изображения, и в процессе фотографирования движущегося изображения может фотографироваться и неподвижное изображение с тем, чтобы выбрать правильный момент для захвата хорошего изображения. В этом случае в записанном неподвижном изображении ухудшение разрешения может быть ограничено. Кроме того, неестественное движение, которое могло бы произойти в выданном на дисплей или записанном движущемся изображении, может быть ограничено таким образом, что оно не будет замечено пользователем видеокамеры, или оно может быть поддержано на допустимом уровне.
Промышленная применимость
Устройство захвата изображения применимо в видеокамере.
Эта заявка на изобретение испрашивает приоритет согласно заявкам на патент Японии: № 2008-168493, поданной 27 июня 2008 года, и № 2008-145333, поданной 3 июня 2008 года, каждая из которых тем самым включается в настоящий документ во всей своей полноте, как если бы она была полностью приведена в данном документе.
Список позиционных обозначений:
2 - формирователь сигнала изображения.
3 - первая схема управления формирователя сигналов изображения.
4 - вторая схема управления формирователя сигналов изображения.
13 - ЦП (контроллер).
15 - генератор величины оценки.
Изобретение относится к устройствам захвата изображения. Техническим результатом является предотвращение подмешивания неподвижного изображения в движущееся изображение. Результат достигается тем, что устройство захвата изображения содержит формирователь сигнала изображения, сконфигурированный таким образом, чтобы выводить сигнал изображения посредством захвата изображения объекта; драйвер, сконфигурированный таким образом, чтобы приводить в действие формирователь сигнала изображения так, чтобы захватывать изображение объекта на основе чересстрочной развертки или прогрессивной развертки; детектор, сконфигурированный таким образом, чтобы распознавать состояние изображения объекта на основе выходных данных сигнала изображения от формирователя сигнала изображения, и контроллер, сконфигурированный таким образом, чтобы управлять драйвером для выбора одного из съемки изображения с чересстрочной разверткой, используемой для захвата изображения объекта посредством чересстрочной развертки формирователя сигнала изображения, и съемки изображения с прогрессивной разверткой, используемой для захвата изображения объекта посредством прогрессивной развертки формирователя сигнала изображения, в соответствии с состоянием изображения объекта, распознанным детектором. 4 н. и 4 з.п. ф-лы, 14 ил.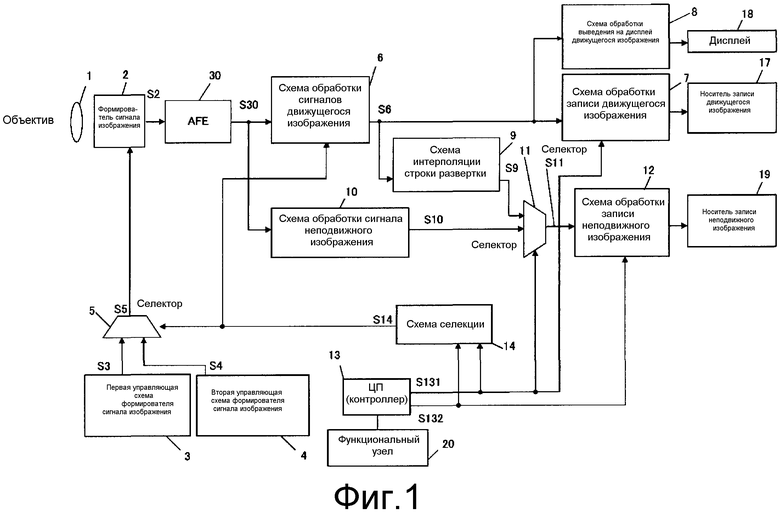
1. Устройство захвата изображения, содержащее:
формирователь сигнала изображения, сконфигурированный таким образом, чтобы выводить сигнал изображения посредством захвата изображения объекта;
драйвер, сконфигурированный таким образом, чтобы приводить в действие формирователь сигнала изображения так, чтобы захватывать изображение объекта на основе чересстрочной развертки или прогрессивной развертки;
детектор, сконфигурированный таким образом, чтобы распознавать состояние изображения объекта на основе выходных данных сигнала изображения от формирователя сигнала изображения; и
контроллер, сконфигурированный таким образом, чтобы управлять драйвером для выбора одного из съемки изображения с чересстрочной разверткой, используемой для захвата изображения объекта посредством чересстрочной развертки формирователя сигнала изображения, и съемки изображения с прогрессивной разверткой, используемой для захвата изображения объекта посредством прогрессивной развертки формирователя сигнала изображения, в соответствии с состоянием изображения объекта, распознанным детектором,
причем упомянутый контроллер управляет драйвером так, чтобы выбирать съемку изображения с прогрессивной разверткой, когда детектор распознает, что в изображении объекта имеется конкретный участок.
2. Устройство захвата изображения, содержащее:
формирователь сигнала изображения, сконфигурированный таким образом, чтобы выводить сигнал изображения посредством захвата изображения объекта;
драйвер, сконфигурированный таким образом, чтобы приводить в действие формирователь сигнала изображения так, чтобы захватывать изображение объекта посредством чересстрочной развертки или прогрессивной развертки;
детектор, сконфигурированный таким образом, чтобы распознавать состояние изображения объекта на основе выходных данных сигнала изображения от формирователя сигнала изображения; и
контроллер, сконфигурированный таким образом, чтобы управлять драйвером для выбора одного из съемки изображения с чересстрочной разверткой, используемой для захвата изображения объекта посредством чересстрочной развертки формирователя сигнала изображения, и съемки изображения с прогрессивной разверткой, используемой для захвата изображения объекта посредством прогрессивной развертки формирователя сигнала изображения, в соответствии с состоянием изображения объекта, распознанным детектором,
причем упомянутый контроллер управляет драйвером, чтобы выбирать съемку изображения с прогрессивной разверткой, когда детектор распознает, что яркость изображения объекта ниже, чем заранее заданная пороговая величина.
3. Устройство захвата изображения, содержащее:
формирователь сигнала изображения, сконфигурированный таким образом, чтобы выводить сигнал изображения посредством захвата изображения объекта;
драйвер, сконфигурированный таким образом, чтобы приводить в действие формирователь сигнала изображения так, чтобы захватывать изображение объекта с использованием чересстрочной развертки или прогрессивной развертки;
детектор, сконфигурированный таким образом, чтобы распознавать состояние изображения объекта на основе выходных данных сигнала изображения от формирователя сигнала изображения; и
контроллер, сконфигурированный таким образом, чтобы управлять драйвером для выбора одного из съемки изображения с чересстрочной разверткой, используемой для захвата изображения объекта посредством чересстрочной развертки формирователя сигнала изображения, и съемки изображения с прогрессивной разверткой, используемой для захвата изображения объекта посредством прогрессивной развертки формирователя сигнала изображения, в соответствии с состоянием изображения объекта, распознанным детектором,
причем упомянутый контроллер управляет драйвером для выбора съемки изображения с чересстрочной разверткой, когда детектор распознает, что цвет изображения объекта попадает внутрь заранее заданного диапазона.
4. Устройство захвата изображения, содержащее:
формирователь сигнала изображения, сконфигурированный таким образом, чтобы выводить сигнал изображения посредством захвата изображения объекта;
драйвер, сконфигурированный таким образом, чтобы приводить в действие формирователь сигнала изображения так, чтобы захватывать изображение объекта с использованием чересстрочной развертки или прогрессивной развертки; и
контроллер, сконфигурированный таким образом, чтобы управлять драйвером, чтобы приводить в действие формирователь сигнала изображения посредством чересстрочной развертки при съемке и записи неподвижного изображения во время ожидания съемки и записи движущегося изображения или во время съемки и записи движущегося изображения, и чтобы приводить в действие формирователь сигнала изображения посредством прогрессивной развертки при съемке и записи неподвижного изображения, без съемки и записи движущегося изображения.
5. Устройство захвата изображения по п.4, дополнительно содержащее:
процессор сигналов движущегося изображения, сконфигурированный таким образом, чтобы выводить движущееся изображение на основе сигнала изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения;
процессор сигналов неподвижного изображения, сконфигурированный таким образом, чтобы выводить неподвижное изображение, на основе сигнала изображения, который получается посредством прогрессивной развертки формирователя сигнала изображения; и
интерполятор строки развертки, сконфигурированный таким образом, чтобы выводить неподвижное изображение, интерполируя строку развертки в сигнале изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения.
6. Устройство захвата изображения по п.1, дополнительно содержащее:
процессор сигналов движущегося изображения, сконфигурированный таким образом, чтобы выводить движущееся изображение на основе сигнала изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения;
процессор сигналов неподвижного изображения, сконфигурированный таким образом, чтобы выводить неподвижное изображение на основе сигнала изображения, который получается посредством прогрессивной развертки формирователя сигнала изображения;
интерполятор строки развертки, сконфигурированный таким образом, чтобы выводить неподвижное изображение, интерполируя строку развертки в сигнале изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения.
7. Устройство захвата изображения по п.2, дополнительно содержащее:
процессор сигналов движущегося изображения, сконфигурированный таким образом, чтобы выводить движущееся изображение на основе сигнала изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения;
процессор сигналов неподвижного изображения, сконфигурированный таким образом, чтобы выводить неподвижное изображение на основе сигнала изображения, который получается посредством прогрессивной развертки формирователя сигнала изображения; и
интерполятор строки развертки, сконфигурированный таким образом, чтобы выводить неподвижное изображение, интерполируя строку развертки в сигнале изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения.
8. Устройство захвата изображения по п.3, дополнительно содержащее:
процессор сигналов движущегося изображения, сконфигурированный таким образом, чтобы выводить движущееся изображение на основе сигнала изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения;
процессор сигналов неподвижного изображения, сконфигурированный таким образом, чтобы выводить неподвижное изображение на основе сигнала изображения, который получается посредством прогрессивной развертки формирователя сигнала изображения;
интерполятор строки развертки, сконфигурированный таким образом, чтобы выводить неподвижное изображение, интерполируя строку развертки в сигнале изображения, который получается посредством чересстрочной развертки формирователя сигнала изображения.
| JP 2003032549 А, 2003.01.31 | |||
| JP 6303562 А, 1994.10.28 | |||
| JP 2005347973 А, 2005.12.15 | |||
| JP 7131713 A, 1995.05.19 | |||
| JP 2005217970 A, 2005.08.11 | |||
| СПОСОБ СОЗДАНИЯ ТЕЛЕВИЗИОННЫХ СИСТЕМ, ИСПОЛЬЗУЕМЫХ НА ПОДВИЖНЫХ НОСИТЕЛЯХ, И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2001 |
|
RU2190934C1 |

