Изобретение относится к исследованию прочностных свойств твердых материалов путем приложения к ним повторяющихся или пульсирующих усилий, более конкретно, путем воздействия на испытываемый образец циклических нагрузок.
Для проведения усталостных прочностных испытаний образцов материалов и изделий используются гидравлические испытательные машины, у которых циклическое нагружение осуществляется за счет использования сервогидравлического следящего электропривода (Роженцев В., Новиков А., Шаманин А. и др. Автоматизированная система для определения механических свойств материалов. // Современные технологии автоматизации. 2007. №2. С.72-78 [1]; Универсальные испытательные машины walter+bai. Динамические испытательные машины, www.melytec.ru [2]) либо гидропульсаторов (Ю.Е.Тябликов. Гидравлические испытательные машины. М. «Машиностроение», 1982. С.39-59 [3]; В.Д.Варсанофьев, О.В.Кузнецов. Гидравлические вибраторы. Ленинград, «Машиностроение», 1979. С.15-19; 139-140 [4]). Преимуществом гидропульсаторных испытательных машин по сравнению с сервогидравлическими испытательными машинами является значительно меньшая потребляемая ими мощность за счет работы в рекуперативном режиме (у гидропульсаторных испытательных машин она меньше в среднем на порядок).
Заявляемая испытательная машина использует гидропульсаторный способ возбуждения циклических нагрузок.
Известны гидравлические машины для проведения усталостных испытаний, использующие гидропульсаторный способ циклического нагружения испытываемого образца, в том числе машины типа ZDM (Испытательная техника. Справочник под редакцией В.В.Клюева, книга 1. М.: «Машиностроение», 1982. С.94-96 [5]) производства Германии и типа МУП, МУГП, МУПЭ, МДУ и МУБ (Справочник под редакцией В.В.Клюева, книга 1. М.: «Машиностроение», 1982. С.104-107 [5]; Сводный каталог «Испытательные машины». М.: Онтиприбор, 1966. С.8-21 [6]) отечественного производства. Указанные испытательные машины имеют нагружающее устройство с нижним или верхним расположением силового гидроцилиндра, насосную установку и гидропульсаторное устройство, состоящее из гидропульсатора, осуществляющего периодическую подачу под давлением определенных объемов рабочей жидкости (минерального масла) в подпоршневую полость силового гидроцилиндра испытательной машины, что, в свою очередь, приводит к появлению циклических нагрузок на испытываемом образце, который замыкает силовую цепь испытательной машины. Гидропульсаторы по конструкции делятся на радиально-поршневые, коаксиально-поршневые и объемно-поршневые. Наибольшее распространение в испытательных машинах получили радиально-поршневые гидропульсаторы (с радиальным относительно оси вращения расположением золотников) (Испытательная техника. Справочник под редакцией В.В.Клюева, книга 1. М.: «Машиностроение», 1982. С.94-96; С.104-107 [5]), их еще называют роторными гидропульсаторами. Гидропульсаторный режим возбуждения циклических нагрузок в таких испытательных машинах осуществляется за счет принудительного вращения ротора гидропульсатора со скоростью V1 и золотникового распределителя со скоростью V2 и основан этот режим на формировании взаимно герметичных периодических гидропотоков рабочей жидкости с последующим их суммированием в определенном порядке для получения результирующих выходных гидропотоков, поступающих в силовой гидроцилиндр испытательной машины. Обратное преобразование осуществляется дроблением (коммутацией) выходящих из гидроцилиндра потоков рабочей жидкости с последующим присоединением их в определенной последовательности к изменяемым объемам гидравлической системы. Роторный гидропульсатор (В.Д.Варсанофьев, О.В.Кузнецов. Гидравлические вибраторы. Ленинград: «Машиностроение», 1979. С.15-19; 139-140 [4]) состоит из цилиндрической направляющей, в которой с определенным экцентриситетом расположен полый золотниковый блок с радиально размещенными поршнями, вращаемый электродвигателем. На валу ротора, вращающего золотниковый блок, закреплен маховик, обеспечивающий рекуперативный режим работы гидропульсатора за счет преобразования потенциальной энергии, накопленной при деформировании испытываемого образца в системе «испытываемый образец - испытательная машина», в кинетическую энергию вращательного движения маховика и обратно (кинетической энергии маховика в потенциальную энергию деформирования испытываемого образца и самой испытательной машины). Поршни в корпусе золотникового блока помещены при помощи подшипника и следуют за золотниковым блоком с той же угловой скоростью. Внутри золотникового блока расположена разделительная цапфа, в которой имеются осевые каналы, соединяющиеся с полостями силового гидроцилиндра испытательной машины. В золотниковом блоке также имеются радиальные каналы, соединяющие подпоршневые камеры с внутренней полостью блока. При вращении золотникового блока рабочая жидкость периодически вытесняется из подпоршневых камер во внутреннюю полость и далее в силовой гидроцилиндр испытательной машины. Изменение амплитуды циклической нагрузки осуществляется за счет дополнительного вращения разделительной цапфы (вращение цапфы изменяет величину потока рабочей жидкости, поступающей во внутреннюю полость золотникового блока). При равенстве угловых скоростей цапфы и золотникового блока в случае вращения их в одну и ту же сторону возбуждение циклических нагрузок осуществляется в низкочастотной области нагружения, а при их встречном вращении происходит увеличение частоты циклической нагрузки. Основным недостатком испытательных машин с роторными гидропульсаторами является значительная сложность конструкции роторных гидропульсаторов, что в начале 80-х годов прошлого столетия и послужило причиной перехода в отечественной испытательной технике на сервогидравлический способ возбуждения циклических нагрузок при проведении усталостных испытаний образцов материалов и изделий.
Прототипом заявляемой испытательной машины является «Машина гидравлическая для механических испытаний при циклических нагружениях» (Патент РФ на изобретение №2337344. Бюл. №30, 2008 г. С.1088-1089 [7]), в которой используется двухзвенная система возбуждения гидравлической энергии, образованная двумя объемно-поршневыми гидропульсаторами. Каждый из гидропульсаторов имеет гидроцилиндр, поршень в котором перемещается по периодическому закону с помощью коленчатого вала, вращаемого электродвигателем. Коленчатые валы гидропульсаторов вращаются в противоположные стороны. На консолях коленчатых валов закреплены маховики, обеспечивающие рекуперацию энергии. Коленчатые валы гидропульсаторов через муфты (авторы их называют «полумуфтами») соединены между собой с помощью редуктора (авторы называют его «специальной муфтой»). Редуктор выполнен в виде зубчатого дифференциального механизма, который с помощью шестерней муфт, сопряженных с зубчатыми сателлитами дифференциала, представляет собой устройство, имеющее возможность с помощью червячного мотор-редуктора поворачиваться относительно оси муфт на угол до 90°. При синфазном вращении коленчатых валов гидропульсаторов испытательная машина обеспечивает максимальную амплитуду циклической нагрузки на испытываемом образце, а при изменении фазы вращения вала одного из коленчатых валов относительно другого амплитуда циклической нагрузки уменьшается и при фазовом сдвиге между ними, равном 180°, амплитуда циклической нагрузки становится равной нулю.
К достоинствам прототипа следует отнести более простую конструкцию испытательной машины за счет более технологичной конструкции ее гидропульсаторной установки, обеспечивающей возбуждение циклических нагрузок на испытываемом образце.
Основным недостатком является нестабильность поддержания амплитуды циклической нагрузки, которая может изменяться в процессе испытаний за счет изменения заданного фазового соотношения между штоками гидроцилиндров гидропульсаторов из-за временной нестабильности мотор-редуктора, при возрастании температуры рабочей жидкости в процессе испытаний и соответствующем увеличении утечек в паре цилиндр-шток силового гидроцилиндра и гидроцилиндров самих гидропульсаторов в случае изменения жесткости испытываемого образца при появлении в нем усталостных микротрещин и др. Отсутствие обратных связей, с помощью которых амплитуда циклической нагрузки поддерживалась бы автоматически на уровне заданной величины, требует постоянного контроля возбуждаемой гидропульсаторной установкой величины амплитуды циклической нагрузки и периодического ее ручного подрегулирования с помощью мотор-редуктора, что значительно усложняет процесс проведения усталостных испытаний, которые при частоте циклической нагрузки 20 Гц длятся в течение нескольких суток до достижения 106 и большего количества циклов наработки, требуемых при проведении усталостных испытаний. Кроме того, устройство, обеспечивающее изменение амплитуды циклической нагрузки и состоящее из зубчатого дифференциала, сопряженного с помощью шестерен с муфтами коленчатых валов гидропульсаторов, управляемое мотор-редуктором, представляет собой достаточно сложный механизм. Для «плавной» работы такого устройства необходимым условием является точное сочленение шестерен муфт с зубчатыми сателлитами дифференциала. Изменение зазоров между зубьями шестерен муфт и сателлитами дифференциала в процессе эксплуатации приводит к нелинейным искажениям в возбуждаемой гидропульсаторной установкой циклической нагрузке, что, в свою очередь, отрицательно сказывается на качестве полученных в процессе проведения испытаний результатов в связи с появлением в спектре нагружения испытываемого образца высокочастотных относительно заданной частоты циклической нагрузки составляющих.
Целью предлагаемого изобретения является повышение точности поддержания испытательной машиной заданной амплитуды циклической нагрузки.
Данная цель достигается за счет того, что статорные обмотки двух электродвигателей, вращающих коленчатые валы и перемещающих штоки гидравлических цилиндров гидропульсаторов, подключены к выходам двух частотных преобразователей, управляющие цифровые входы которых соединены с выходами контроллера, который своими двумя аналоговыми входами соединен с задатчиками амплитуды и частоты циклической нагрузки, а двумя цифровыми входами подключен к выходам датчиков углового положения коленчатых валов гидропульсаторов, при этом выход датчика силы испытательной машины соединен с входом амплитудного детектора, выходом своим подключенного к третьему аналоговому входу контроллера.
Предлагаемая гидропульсаторная испытательная машина, представленная на рисунке, состоит из силовой рамы 1, датчика силы 2, захватных устройств 3, силового гидроцилиндра 4, насосной установки 5, гидропульсаторов 6 и 7, маховиков 8 и 9, электродвигателей 10 и 11, частотных преобразователей 12 и 13, датчиков углового положения 14 и 15 коленчатых валов (не имеют позиционного обозначения), амплитудного детектора 16 и контроллера 17.
Силовая рама 1 гидропульсаторной испытательной машины представляет собой жесткую пространственную конструкцию, на которой крепятся основные элементы машины: датчик силы 2, силовой гидроцилиндр 4 и захватные устройства 3. Силовые рамы испытательных машин широко известны, в частности, аналогичные конструкции описаны в (Испытательная техника. Справочник под редакцией В.В.Клюева, книга 1 М.: «Машиностроение», 1982. С.30-40) [5].
Датчик силы 2 предназначен для измерения усилия на испытуемом образце. Конструкция и принцип действия датчика не имеют принципиального значения, он может быть тензометрического, струнного или магнитострикционного типов.
Захватные устройства 3 служат для фиксации образцов при проведении испытаний на растяжение и сжатие. Конструкция захватных устройств не является предметом изобретения, поэтому на рисунке они показаны схематично.
Силовой гидроцилиндр 4 предназначен для создания силового воздействия на испытываемый образец. Конструкция гидроцилиндра также не имеет принципиального значения в предлагаемой конструкции испытательной машины. Он может быть плунжерным, имеющим одну рабочую полость, двухштоковым с двумя симметричными рабочими полостями или одноштоковым с двумя асимметричными полостями.
Насосная установка 5 представляет собой типовое устройство, обеспечивающее на выходе номинальные расход и давление рабочей жидкости. Конструктивной особенностью насосной установки является обратный клапан (на рисунке обратный клапан не имеет позиционного обозначения, его введение в схему не относится к предлагаемому изобретению), защищающий гидравлический насос от пульсаций давления, возникающих в процессе работы гидропульсаторов.
Каждый из гидропульсаторов 6 и 7 представляет собой конструкцию, состоящую из гидроцилиндра, поршень которого через шток сочленен с коленчатым валом, закрепленным в подшипниках. На консолях коленчатых валов закреплены круговые датчики углового положения и маховики.
Маховики 8 и 9 представляют собой массивные диски, которые в процессе вращения обеспечивают процесс рекуперации энергии за счет превращения потенциальной энергии, накопленной при деформировании объекта испытания в системе «образец - машина» в кинетическую энергию вращательного движения маховика и обратно.
Электродвигатели 10 и 11 являются типовыми асинхронными двигателями переменного тока с короткозамкнутым ротором.
Частотные преобразователи 12 и 13 (www.gu-sta.rn. Преобразователи частоты компании ВЕСПЕР [8]) предназначены для управления асинхронными двигателями переменного тока, вращающими коленчатые валы гидропульсаторов 6 и 7. Частотные преобразователи 12 и 13 совместно с электродвигателями 10 и 11 образуют асинхронный частотно-управляемый электропривод (Москаленко В.В. Электрический привод. М.: ACADEMA, 2004. С.95-149 [9]; Терехов В.М., Осипов О.И. Системы управления приводов. М.: ACADEMA, 2005. С.159-204 [10]), управляющий исполнительными механизмами (в нашем случае перемещением штоков гидропульсаторов 6 и 7).
Круговые датчики углового положения 14 и 15 представляют собой абсолютный датчик углового положения (абсолютный энкодер) (www.skbis.rn. Преобразователи угловых перемещений [11]) и предназначены для измерения положения коленчатых валов (штоков) гидропульсаторов.
Амплитудный детектор 16 представляет собой электронное устройство на базе широко известных пиковых детекторов, запоминающих максимальные и минимальные значения амплитуды циклического сигнала, поступающего на его вход. После обработки сигнала в соответствии с формулой A=(Amax-Amin)/2 на выходе детектора формируется уровень постоянного напряжения, по величине пропорциональный амплитуде циклического входного сигнала.
Контроллер 17 представляет собой цифроаналоговое устройство, выполняющее следующие функции:
1) измерение амплитудного значения циклической нагрузки, сравнение его с заданным значением и формирование цифрового разностного управляющего сигнала;
2) считывание сигналов углового положения коленчатых валов гидропульсаторов с круговых датчиков положения 14 и 15 и вычисление величины и знака взаимного их расположения (опережения или запаздывания относительно друг друга);
3) формирование сигналов воздействия на частотные преобразователи 12 и 13 для управления изменением скорости вращения (частоты оборотов) асинхронных двигателей 10 и 11.
Контроллер 17 может быть любым из серийно выпускаемых контроллеров фирм-изготовителей (Octagon Systems, Advantech, ICP DAS, Fastwel и др.), имеющих цифровые и аналоговые входы и выходы.
Предлагаемая гидропульсаторная испытательная машина работает следующим образом.
На входы вх.1 и вх.2 контроллера 17 задаются амплитуда и частота в виде уровней постоянного тока, определяющие параметры управляющего сигнала циклического нагружения: на вход вх.1 подается сигнал, пропорциональный задаваемой амплитуде циклической нагрузки, а на вход вх.2 - сигнал, пропорциональный частоте циклического нагружения.
Контроллер 17 плавно, в течение заданного времени, передает частотным преобразователям 12 и 13 значение частоты от 0 до заданного на входе вх.2 значения и таким образом "разгоняет" асинхронные двигатели 10 и 11 и маховики 8 и 9, которые, в свою очередь, приводят в движение штоки гидропульсаторов 6 и 7, перекачивающие рабочую жидкость между собственными полостями гидроцилиндров и полостью силового гидроцилиндра 4, встроенного в силовую раму 1, воздействуя тем самым на испытуемый образец 18 циклической нагрузкой.
Насосная установка 5 обеспечивает компенсацию утечек рабочей жидкости, которые возникают в процессе работы гидравлических приводов машины.
На чертеже показан частный случай, когда положения коленчатых валов, а соответственно и положения штоков гидроцилиндров гидропульсаторов 6 и 7 находятся в крайних противоположных положениях, что соответствует сдвигу фаз между ними на угол, равный 180°. В этом случае рабочая жидкость перемещается между верхними надпоршневыми полостями гидроцилиндров гидропульсаторов 6 и 7, не создавая избыточного давления на шток силового гидроцилиндра 4, поскольку при движении штоков гидроцилиндров гидропульсаторов 6 и 7 в противофазе объем вытесняемой штоком гидроцилиндра одного из гидропульсаторов рабочей жидкости равняется объему нагнетаемой (всасываемой) рабочей жидкости другим гидропульсатором.
Другим частным случаем, поясняющим принцип работы предлагаемой гидропульсаторной испытательной машины, является работа гидропульсаторов в синфазном режиме, когда положения коленчатых валов, а соответственно и положение штоков гидроцилиндров гидропульсаторов 6 и 7 находятся в одинаковых положениях, что соответствует углу сдвига фаз между ними, равному 0° или 360°.
В этом случае вся вытесняемая штоками гидроцилиндров гидропульсаторов 6 и 7 рабочая жидкость перемещается в рабочую полость силового гидроцилиндра 4, создавая в нем при этом избыточное давление и соответственно возбуждая нагрузку на испытываемом образце 18.
Углы сдвига фаз от 0° до 180° и от 180° до 360° между положениями штоков гидроцилиндров гидропульсаторов 6 и 7 являются рабочими зонами регулирования амплитуды циклической нагрузки гидропульсаторной испытательной машины, в этих зонах происходит нагружение испытуемого образца 18 циклической нагрузкой.
Таким образом, процесс регулирования амплитуды нагрузки в гидропульсаторной испытательной машине заключается в изменении угла сдвига фаз между штоками гидроцилиндров гидропульсаторов. Для измерения угла сдвига фаз одного из штоков гидроцилиндра гидропульсатора относительно другого служат абсолютные датчики углового положения 14 и 15. Разность между их показаниями и является тем углом сдвига фазы, пропорционально которому воспроизводится заданная величина амплитуды циклической нагрузки.
Рассмотрим более подробно процесс регулирования амплитуды циклической нагрузки из начального положения, изображенного на рисунке, когда штоки гидроцилиндров гидропульсаторов 6 и 7 находятся в крайних противоположных положениях, соответствующих углу сдвига фаз, равному 180°.
Для удобства пояснения работы гидропульсаторной испытательной машины входящие в нее устройства 6, 8, 10, 12 и 14 условно назовем "ведущим" каналом, так как его частотные характеристики являются изначальными и в процессе работы машины не подлежат перестройке, а устройства 7, 9, 11, 13 и 15 условно назовем "ведомым" каналом, поскольку его частотная перестройка относительно "ведущего" канала позволяет регулировать амплитуду циклической нагрузки в процессе работы машины.
Процесс изменения угла сдвига фазы «ведомого» канала относительно «ведущего» заключается в изменении (увеличении или уменьшении) частоты оборотов одного из асинхронных электродвигателей 10 или 11. В рассматриваемом случае управление частотой оборотов будет производиться в "ведомом" канале (электродвигатель 11), а частота оборотов электродвигателя 10 "ведущего" канала будет оставаться неизменной. Изменение частоты оборотов электродвигателя 11 приводит к ускорению или замедлению скорости вращения вала "ведомого" электродвигателя 11 относительно "ведущего" (10-го) и соответственно к изменению взаимного положения штоков гидроцилиндров гидропульсаторов 6 и 7, при этом разность показаний датчиков углового положения 14 и 15 будет соответствовать фазовому сдвигу между штоками гидроцилиндров гидропульсаторов 14 и 15.
Случай, когда фазовый сдвиг между «ведомым» и «ведущим» каналами больше нуля, но меньше либо равен 180°, соответствует отставанию "ведущего" канала от "ведомого" канала.
Рассмотрим действия контроллера 17 при регулировании амплитуды циклической нагрузки в случае «неизменной частоты «f0» циклической нагрузки:
- для увеличения амплитуды циклической нагрузки на испытуемом образце 18 контроллер 17 снимает команду «f0» с частотного преобразователя 13 и выдает ему команду «f2». Эта команда перестраивает частотный преобразователь 13 на формирование несколько меньшей частоты оборотов электродвигателя 11 относительно заданной частоты «f0» для "ведущего" канала. При этом "ведущий" канал как бы "догоняет" по фазе "ведомый" канал, вследствие чего угол сдвига фаз между каналами стремится к нулю (каналы стремятся к синфазной работе), в результате чего возрастает амплитуда циклической нагрузки на испытываемом образце 18. Контроллер 17 в течение всего этого процесса считывает с амплитудного детектора 16 значения амплитуды циклической нагрузки и сравнивает их с заданным значением амплитуды. По достижении равенства измеренной и заданной амплитуд циклической нагрузки контроллер 17 снимает команду «f2» и выдает на частотный преобразователь 13 команду «f0», возвращая "ведомый" канал в режим работы по частоте, одинаковой с частотой "ведущего" канала;
- для уменьшения амплитуды циклической нагрузки на испытываемом образце контроллер 17 снимает команду «f0» с частотного преобразователя 13 и выдает команду «f1» частотному преобразователю 13 "ведомого" канала. Эта команда перестраивает частотный преобразователь 13 на формирование несколько большей частоты оборотов электродвигателя 11 относительно заданной частоты «f0» для "ведущего" канала. При этом "ведомый" канал как бы "убегает" по фазе от "ведущего" канала, угол сдвига фаз между каналами стремится к 180° (каналы стремятся к противофазной работе), и, как следствие этого процесса, амплитуда циклической нагрузки на испытываемом образце уменьшается. Контроллер 17 в течение всего этого процесса считывает с амплитудного детектора 16 значения амплитуды циклической нагрузки и сравнивает их с заданным значением амплитуды. По достижении равенства измеренной и заданной амплитуд циклической нагрузки контроллер 17 снимает команду «f1» и выдает на частотный преобразователь 13 команду «f0», возвращая "ведомый" канал в режим работы по частоте, одинаковой с частотой "ведущего" канала.
Когда фазовый сдвиг между «ведомым» и «ведущим» каналами больше 180°, но меньше 360°, это соответствует отставанию "ведомого" канала от "ведущего" канала. При этом контроллер 17 выполняет "зеркальные" действия по отношению к ранее рассмотренному случаю:
- для увеличения амплитуды циклической нагрузки на испытываемом образце контроллер 17 снимает команду «f0» с частотного преобразователя 13 и выдает команду «f1» частотному преобразователю 13 "ведомого" канала. Эта команда перестраивает частотный преобразователь 13 на формирование несколько большей частоты оборотов электродвигателя 11 относительно заданной частоты «f0» для "ведущего" канала. При этом "ведомый" канал как бы "догоняет" по фазе "ведущий" канал, угол сдвига фаз между каналами стремится к 360° (в конечном итоге к нулю), в результате чего каналы стремятся к синфазной работе, вследствие чего возрастает амплитуда циклической нагрузки на испытываемом образце 18. Контроллер 17 в течение всего этого процесса считывает с амплитудного детектора 16 значения амплитуды циклической нагрузки и сравнивает их с заданным значением амплитуды. По достижении равенства измеренной и заданной амплитуд циклической нагрузки контроллер 17 снимает команду «f2» и выдает на частотный преобразователь 13 команду «f0», возвращая "ведомый" канал в режим работы по частоте, одинаковой с "ведущим" каналом;
- для уменьшения амплитуды циклической нагрузки на испытываемом образце контроллер 17 снимает команду «f0» с частотного преобразователя 13 и выдает команду «f2» частотному преобразователю 13 "ведомого" канала. Эта команда перестраивает частотный преобразователь 13 на формирование несколько меньшей частоты оборотов электродвигателя 11 относительно заданной частоты «f0» для "ведущего" канала. При этом "ведомый" канал как бы "отстает" по фазе от "ведущего" канала, угол сдвига фаз между каналами стремится к 180° (каналы стремятся к противофазной работе), вследствие чего амплитуда циклической нагрузки уменьшается. Контроллер 17 в течение всего этого процесса считывает с амплитудного детектора 16 значения амплитуды циклической нагрузки и сравнивает их с заданным значением амплитуды. По достижении равенства измеренной и заданной амплитуд циклической нагрузки контроллер 17 снимает команду «f2» и выдает на частотный преобразователь 13 команду «f0», возвращая "ведомый" канал в режим работы по частоте, одинаковой с частотой "ведущего" канала.
Описание работы системы регулирования амплитуды циклической нагрузки проведено при неизменной частоте нагружения испытываемого образца «f0». Аналогично система регулирования амплитуды циклической нагрузки работает и при другой частоте циклического нагружения, которая задается путем изменения задающего сигнала на входе вх.2 контроллера 17.
Таким образом, в предлагаемой гидропульсаторной испытательной машине осуществляется автоматическое регулирование амплитуды циклической нагрузки путем непрерывного сравнения сигналов задания и обратной связи с последующим воздействием преобразованным контроллером в цифровой вид разностным сигналом на частотно-управляемые электроприводы гидропульсаторов с учетом фазового сдвига между их штоками. Стабилизация амплитуды циклической нагрузки с помощью предложенного устройства обладает значительно более высокой точностью по сравнению с прототипом. Экспериментальные исследования показали, что погрешность поддержания амплитуды циклической нагрузки в диапазоне регулирования от 10 до 100% номинальной нагрузки испытательной машины не превышает ±1% от установленной (заданной) величины.
Использованная литература
1. Роженцев В., Новиков А., Шаманин А. и др. Автоматизированная система для определения механических свойств материалов. // Современные технологии автоматизации. 2007. №2. С.72-78.
2.. www.melytec.ru Универсальные испытательные машины walter+bai. Динамические испытательные машины.
3. Ю.Е.Тябликов. Гидравлические испытательные машины. М.: «Машиностроение», 1982. С.39-59.
4. В.Д.Варсанофьев, О.В.Кузнецов. Гидравлические вибраторы. Ленинград: «Машиностроение», 1979. С.15-19; 139-140.
5. Испытательная техника. Справочник под ред. В.В.Клюева, книга 1. М.: «Машиностроение», 1982. С.30-40, С.94-96; С.104-107.
6. Сводный каталог «Испытательные машины». М.: Онтиприбор, 1966. С.8-21.
7. Патент РФ на изобретение №2337344, Бюл. №30, 2008 г. С.1088-1089.
8. www.gu-sta.ru. Преобразователи частоты компании ВЕСПЕР.
9. Москаленко В.В. Электрический привод. М.: ACADEMA, 2004. С.95-149.
10. Терехов В.М., Осипов О.И. Системы управления приводов. М.: ACADEMA, 2005. С.159-204.
11. www.skbis.ru. Преобразователи угловых перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ИСПЫТАТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ | 2006 |
|
RU2310824C1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ПРИ ЦИКЛИЧЕСКИХ НАГРУЖЕНИЯХ | 2007 |
|
RU2337344C1 |
| МАШИНА ДЛЯ ИСПЫТАНИЯ ВИНТОВЫХ ПРУЖИН | 2008 |
|
RU2412430C2 |
| Стенд для проведения статических и циклических испытаний крестообразных образцов | 2018 |
|
RU2735713C1 |
| СИЛОВАЯ РАМА УНИВЕРСАЛЬНОЙ ИСПЫТАТЕЛЬНОЙ МАШИНЫ | 2008 |
|
RU2393453C1 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765511C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765322C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765193C1 |
Изобретение относится к исследованию прочностных свойств твердых материалов путем приложения к ним повторяющихся или пульсирующих усилий, более конкретно, путем воздействия на испытываемый образец циклических нагрузок. Гидропульсаторная испытательная машина содержит силовую раму, датчик силы, захватные устройства для крепления испытываемых образцов или изделий, силовой гидроцилиндр, насосную установку для подачи рабочей жидкости в гидросистему машины, два электродвигателя, два гидропульсатора с маховиками, цилиндры которых объединены общим гидравлическим коллектором с рабочей полостью силового гидроцилиндра машины. Статорные обмотки двух электродвигателей, вращающих коленчатые валы и перемещающих штоки гидравлических цилиндров гидропульсаторов, подключены к выходам двух частотных преобразователей, управляющие цифровые входы которых соединены с выходами контроллера, который своими двумя аналоговыми входами соединен с задатчиками амплитуды и частоты циклической нагрузки, а двумя цифровыми входами подключен к выходам датчиков углового положения коленчатых валов гидропульсаторов. Выход датчика силы испытательной машины соединен с входом амплитудного детектора, своим выходом подключенного к третьему аналоговому входу контроллера. Технический результат: повышение точности поддержания испытательной машиной заданной амплитуды циклической нагрузки. 1 ил.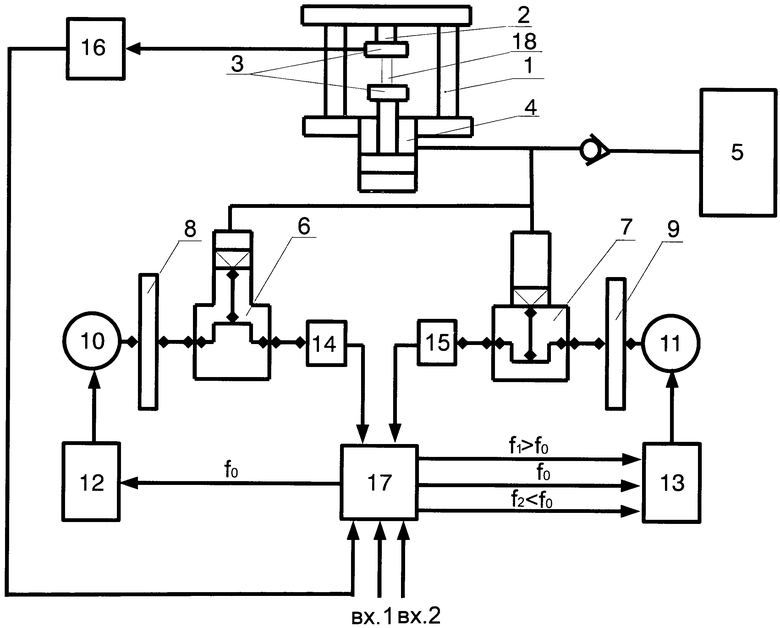
Гидропульсаторная испытательная машина для циклических испытаний образцов материалов или изделий на усталость, содержащая силовую раму, датчик силы, захватные устройства для крепления испытываемых образцов или изделий, силовой гидроцилиндр, насосную установку для подачи рабочей жидкости в гидросистему машины, два электродвигателя, два гидропульсатора с маховиками, цилиндры которых объединены общим гидравлическим коллектором с рабочей полостью силового гидроцилиндра машины, отличающаяся тем, что статорные обмотки двух электродвигателей, вращающих коленчатые валы и перемещающих штоки гидравлических цилиндров гидропульсаторов, подключены к выходам двух частотных преобразователей, управляющие цифровые входы которых соединены с выходами контроллера, который своими двумя аналоговыми входами соединен с задатчиками амплитуды и частоты циклической нагрузки, а двумя цифровыми входами подключен к выходам датчиков углового положения коленчатых валов гидропульсаторов, при этом выход датчика силы испытательной машины соединен с входом амплитудного детектора, своим выходом подключенного к третьему аналоговому входу контроллера.
| МАШИНА ГИДРАВЛИЧЕСКАЯ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ПРИ ЦИКЛИЧЕСКИХ НАГРУЖЕНИЯХ | 2007 |
|
RU2337344C1 |
| ГИДРАВЛИЧЕСКАЯ МАШИНА ДЛЯ ИСПЫТАНИЙ - НА УСТАЛОСТЬ | 0 |
|
SU343189A1 |
| Установка для испытания образцов на усталость при циклическом изгибе | 1978 |
|
SU746246A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДСЧЕТА ГОЛОСУЮЩИХ В ЗАЛАХ ЗАСЕДАНИЙ | 1940 |
|
SU64370A1 |
| US 0003646807 A1, 07.03.1972. | |||

