Изобретения относятся к радиосвязи и могут быть одновременно использованы для формирования требуемых амплитудно-манипулированных или амплитудно-модулированных сигналов, а также для демодуляции указанных типов сигналов.
Известен способ модуляции амплитуды высокочастотного сигнала, основанный на перемножении низкочастотного управляющего (первичного, информационного) и несущего (высокочастотного) сигнала на квадратичном участке вольтамперной характеристики (ВАХ) нелинейного элемента. В частном случае этот участок может быть охарактеризован кусочно-линейной аппроксимирующей функцией. В результате амплитуда несущего сигнала изменяется по закону изменения управляющего сигнала (см. Баскаков С.И. Радиотехнические цепи и сигналы. - М.: Высшая школа, 1988, с.88-92).
Известно устройство модуляции амплитуды несущего сигнала, на входе которого имеется двухполюсный нелинейный элемент, включенный в поперечную цепь, к обоим электродам которого подключен источник управляющего сигнала и источник несущего сигнала. На выходе устройства подключена избирательная нагрузка, настроенная на частоту несущего сигнала. Между нагрузкой и двухполюсным нелинейным элементом включено согласующее устройство. Согласующее устройство предназначено для обеспечения заданного коэффициента амплитудной модуляции путем осуществления заданного отношения модулей и разности фаз коэффициентов передачи в двух состояниях нелинейного элемента, определяемых двумя уровнями амплитуды управляющего сигнала [Головков А.А., Минаков В.А. Устройство модуляции амплитуды и фазы многочастотных сигналов. Патент №2291554, 10.01.2007, по заявке №2005126104 от 17.08.2005]. Принцип действия устройства состоит в следующем. Разность фаз полагается равной нулю. В результате взаимодействия несущего и управляющего сигналов между собой, нелинейным элементом, согласующим устройством и избирательной нагрузкой формируется высокочастотный сигнал, амплитуда которого изменяется по закону изменения амплитуды первичного сигнала. Достижение такого результата возможно только на линейном участке модуляционной характеристики. В общем случае модуляционная характеристика - нелинейная функция. Линейной ее можно считать только при наличии условий, при которых ВАХ можно аппроксимировать кусочно-линейной функцией. При скачкообразном переключении нелинейного элемента из одного состояния в другое всегда возможно формирование амплитудно-манипулированного сигнала (АМнС) с заданным отношением модулей коэффициентов передачи в двух состояниях.
Указанные способ и устройство можно использовать в интересах демодуляции амплитудно-модулированного сигнала (АМС). В этом случае в качестве управляющего сигнала необходимо использовать огибающую входного АМС, причем амплитуда огибающей АМС при демодуляции должна быть равна амплитуде управляющего сигнала при модуляции несущего сигнала. В противном (общем) случае коэффициент амплитудной модуляции принятого АМС оказывается неизвестным, а демодулятор - малоэффективным из-за малой величины коэффициента детектирования.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ модуляции и демодуляции [Головков А.А., Федюнин И.И. Способ и устройство демодуляции амплитудно-модулированных радиочастотных сигналов. Патент №2366075 от 27.08.2009 по заявке №2008104995 от 11.02.2008], состоящий в том, что демодулятор включают между источником радиочастотных амплитудно-модулированных сигналов и низкочастотной нагрузкой и выполняют его из четырехполюсника, двухэлектродного нелинейного элемента, фильтра нижних частот, с помощью нелинейного элемента разлагают спектр амплитудно-модулированных сигналов, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения амплитуды амплитудно-модулированного входного сигнала, нелинейный элемент включают между четырехполюсником и избирательной высокочастотной нагрузкой в поперечную цепь, четырехполюсник выполняют из числа реактивных двухполюсников, не меньшего трех, значения параметров которых выбирают из условия обеспечения заданного коэффициента амплитудной модуляции, определяемой заданным значением модуля коэффициента передачи демодулятора во втором состоянии нелинейного элемента и определенным из условия физической реализуемости значением модуля коэффициента передачи демодулятора в первом состоянии нелинейного элемента, при этом указанные условия определяются с помощью специальных математических выражений. Если к нелинейному элементу подключить источник управляющего сигнала, а вместо источника АМС подключить источник несущего сигнала, то в общем случае будет обеспечена модуляция по амплитуде и фазе высокочастотного сигнала с неизвестными коэффициентом амплитудной модуляции и девиацией фазы, который будет сформирован на высокочастотной нагрузке.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является устройство демодуляции амплитудно-модулированных сигналов [см. там же], состоящее из четырехполюсника, двухэлектродного нелинейного элемента в поперечной цепи, фильтра нижних частот, последовательно включенной разделительной емкости и низкочастотной нагрузки, четырехполюсник выполнен из П-образной схемы соединения трех реактивных двухполюсников с сопротивлениями х1, x2, x3, значения которых выбраны из условия обеспечения заданного значения модуля коэффициента передачи демодулятора во втором состоянии нелинейного элемента и условия определения значения модуля коэффициента передачи демодулятора в первом состоянии нелинейного элемента, при котором обеспечивается физическая реализуемость четырехполюсника, при этом указанные условия реализуются путем использования специальных математических выражений. Если к нелинейному элементу подключить источник управляющего сигнала, а вместо источника АМС подключить источник несущего сигнала, то в общем случае будет обеспечена модуляция по амплитуде и фазе высокочастотного сигнала с неизвестными коэффициентом амплитудной модуляции и девиацией фазы, который будет сформирован на высокочастотной нагрузке.
Основным недостатком этих способа и устройства является отсутствие возможности одновременного формирования требуемых амплитудно-манипулированных или амплитудно-модулированных сигналов с заданным коэффициентом амплитудной модуляции, а также возможности демодуляции указанных типов сигналов с заданным образом скорректированным коэффициентом амплитудной модуляции с помощью одного устройства путем обеспечения заданных отношений модулей коэффициентов передачи в двух состояниях нелинейного элемента, определяемых двумя уровнями управляющего сигнала или двумя уровнями АМС, что не позволяет унифицировать модуляторы и демодуляторы, уменьшать их номенклатуру, массу и габариты и на этой основе повышать эффективность средств радиосвязи в целом.
Техническим результатом изобретения является формирование требуемых амплитудно-манипулированных или амплитудно-модулированных сигналов, а также демодуляция указанных типов сигналов путем реализации заданных отношений модулей коэффициентов передачи в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды управляющего сигнала, и заданных отношений модулей коэффициентов передачи в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды входного АМС, с помощью одного устройства.
В режиме модуляции это приводит к формированию указанных сигналов с заданным коэффициентом амплитудной модуляции. В режиме демодуляции это приводит к заданной коррекции коэффициента амплитудной модуляции независимо от его значения на входе демодулятора, что повышает помехоустойчивость приемника. Возможность выбора места включения нелинейного элемента обеспечивает повышение физической реализуемости и увеличение рабочей полосы частот. Далее в режиме модуляции под термином «высокочастотный сигнал» будем понимать несущий сигнал, а под термином «управляющий сигнал» - сигнал источника управляющего сигнала. В режиме демодуляции под термином «высокочастотный сигнал» будем понимать АМС, а под термином «управляющий сигнал» - огибающую АМС.
1. Указанный результат достигается тем, что в способе амплитудной модуляции и демодуляции высокочастотных сигналов, состоящем в том, что устройство модуляции и демодуляции включают между источником высокочастотных сигналов и низкочастотной нагрузкой и выполняют его из каскадно соединенных согласующего четырехполюсника, двухэлектродного нелинейного элемента, высокочастотной нагрузки и фильтра нижних частот, в режиме демодуляции с помощью нелинейного элемента разлагают спектр амплитудно-модулированных сигналов, корректируют их коэффициент амплитудной модуляции, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения амплитуды высокочастотного сигнала, четырехполюсник выполняют из числа реактивных двухполюсников, не меньшего трех, дополнительно нелинейный элемент включают в продольную цепь, в режиме модуляции изменяют амплитуду высокочастотного сигнала по закону изменения амплитуды управляющего сигнала, значения сопротивлений двухполюсников выбирают из условия одновременного обеспечения заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды управляющего сигнала, на заданном количестве частот, причем в режиме демодуляции в качестве управляющего сигнала используют огибающую входного амплитудно-модулированного сигнала, двухполюсники формируют из числа реактивных элементов, не меньшего заданного числа частот, значения параметров элементов определяют из условия реализации выбранных значений сопротивлений двухполюсников на заданном количестве частот, сформированный в режиме модуляции высокочастотный сигнал снимают с высокочастотной нагрузки.
2. Указанный результат достигается тем, что в устройстве модуляции и демодуляции высокочастотных сигналов, состоящем из каскадно соединенных согласующего четырехполюсника, выполненного из числа реактивных двухполюсников, не меньшего трех, двухэлектродного нелинейного элемента, высокочастотной нагрузки и фильтра нижних частот, дополнительно нелинейный элемент включен в продольную цепь, к нелинейному элементу подключен источник управляющего сигнала, фильтр нижних частот выполнен в виде Г-образного соединения элементов L и С, значения которых выбраны из условия обеспечения большого его входного сопротивления на частоте высокочастотного сигнала, четырехполюсник выполнен из четырех реактивных двухполюсников, соединенных по лестничной схеме в виде двух Г-образных соединений, каждый двухполюсник сформирован из трех реактивных элементов, при этом значения сопротивлений x2n, x3n, x4n второго, третьего и четвертого двухполюсников выбраны из условия одновременного обеспечения заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды управляющего сигнала или двумя уровнями амплитудно-модулированного сигнала, на заданных двух частотах, второй, третий и четвертый двухполюсники сформированы из параллельно соединенных между собой последовательного контура L1k, C1k и дополнительного реактивного двухполюсника с сопротивлением Xkn, значения параметров элементов двухполюсников определены из условия реализации выбранных значений сопротивлений x2n, x3n, x4n двухполюсников на этих частотах:
 ;
;  ;
;
 ;
;  ;
;  ,
,
где α=(x0-Ed)γ-Dd; β=Fdγ-Ed-x0;  ;
;  ;
;
 ;
;  ;
;  ; A=A1m21+A2; B=B1m21+B2;
; A=A1m21+A2; B=B1m21+B2;
A1=-(rн+r1); A2=rн+r2; B1=-(xн+x1); B2=xн+x2; С=-(1-m21);
 ;
;  ;
;  ; Ad=A1dm21d+A2d; Bd=B1dm21d+B2d;
; Ad=A1dm21d+A2d; Bd=B1dm21d+B2d;
A1d=-(rн+r1d); A2d=rн+r2d; B1d=-(xн+x1d); B2d=xн+x2d; C=-(1-m21d);  ;
;
 ;
;  ;
;  , причем каждый дополнительный двухполюсник формируется из емкости
, причем каждый дополнительный двухполюсник формируется из емкости  при x2n,3n,4n<0 или из индуктивности Xkn=ωnLk при х2,3,4>0 на обеих частотах, а в других случаях - либо из емкости, либо из индуктивности; r1,2,x1,2 - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме модуляции в двух состояниях, определяемых двумя значениями амплитуды управляющего сигнала; r1d,2d, x1d,2d - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме демодуляции в двух состояниях, определяемых двумя значениями амплитуды входного сигнала; m21 - заданное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме модуляции; m21d - расчетное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме демодуляции; n=1,2; m=2,3,4 - номер частоты и номер двухполюсника; r0, x0, rнхн - заданные действительные и мнимые составляющие сопротивлений источника сигнала и нагрузки на заданных частотах
при x2n,3n,4n<0 или из индуктивности Xkn=ωnLk при х2,3,4>0 на обеих частотах, а в других случаях - либо из емкости, либо из индуктивности; r1,2,x1,2 - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме модуляции в двух состояниях, определяемых двумя значениями амплитуды управляющего сигнала; r1d,2d, x1d,2d - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме демодуляции в двух состояниях, определяемых двумя значениями амплитуды входного сигнала; m21 - заданное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме модуляции; m21d - расчетное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме демодуляции; n=1,2; m=2,3,4 - номер частоты и номер двухполюсника; r0, x0, rнхн - заданные действительные и мнимые составляющие сопротивлений источника сигнала и нагрузки на заданных частотах  ; сопротивление x1n первого двухполюсника выбрано произвольно с исключением случая короткого замыкания;
; сопротивление x1n первого двухполюсника выбрано произвольно с исключением случая короткого замыкания;  ;
;  ;
;  - расчетные оптимальные значения отношений элементов a, b, с, d классической матрицы передачи реактивного четырехполюсника.
- расчетные оптимальные значения отношений элементов a, b, с, d классической матрицы передачи реактивного четырехполюсника.
На фиг.1 показана схема устройства модуляции и демодуляции высокочастотных сигналов (прототип).
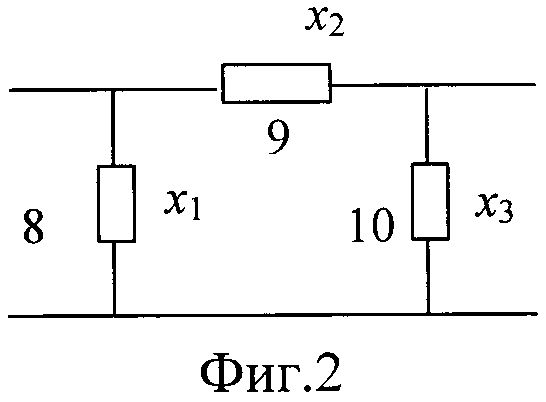
На фиг.2 показана схема четырехполюсника, входящего в устройство-прототип, схема которого изображена на фиг.1.
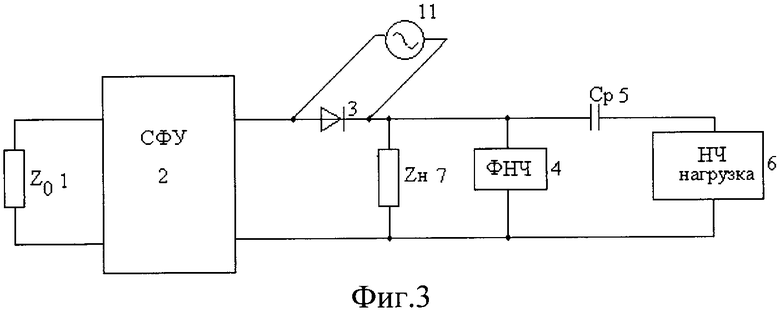
На фиг.3 показана структурная схема предлагаемого устройства по п.2, реализующая предлагаемый способ по п.1.
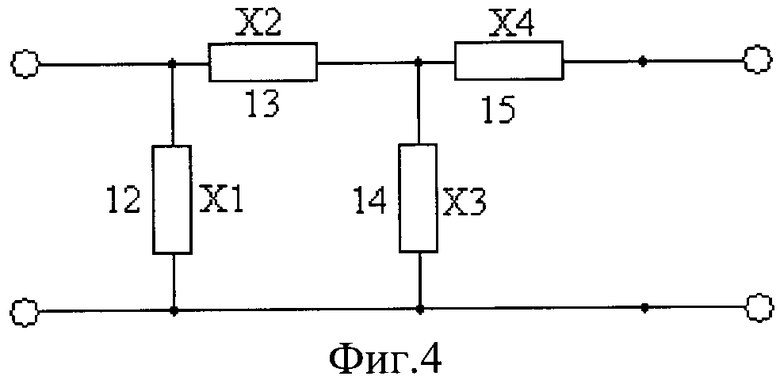
На фиг.4 приведена схема четырехполюсника, входящего в предлагаемое устройство, схема которого представлена на фиг.3.
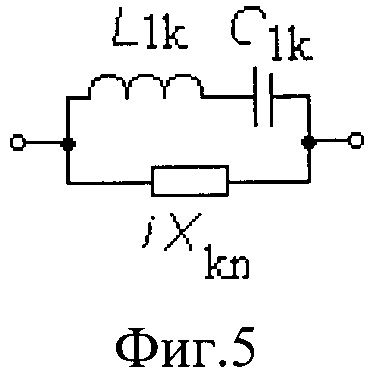
На фиг.5 приведена схема двухполюсников, входящих в схему четырехполюсника, изображенного на фиг.4.
Устройство-прототип содержит источник 1 высокочастотных сигналов, реактивный четырехполюсник (или четырехполюсник, или согласующий четырехполюсник) 2, нелинейный элемент 3, высокочастотную нагрузку - 7, фильтр нижних частот 4 на элементах R, C, разделительную емкость 5 на элементе Ср и низкочастотную нагрузку 6 на элементах Rн, Сн. Четырехполюсник выполнен из П-образного соединения трех реактивных двухполюсников 8, 9, 10, значения сопротивлений которых выбраны из условия обеспечения заданной коррекции коэффициента амплитудной модуляции АМС. Принцип действия устройства модуляции и демодуляции высокочастотных сигналов (прототипа), реализующего способ-прототип, состоит в следующем. Высокочастотный сигнал от источника 1 подают на устройство модуляции и демодуляции. В режиме демодуляции с помощью нелинейного элемента 3 разрушается спектр АМС на высокочастотные и низкочастотные составляющие. Последние выделяются с помощью ФНЧ 4 и поступают в низкочастотную нагрузку 6. Между источником модулированных сигналов и нелинейным элементом включен реактивный четырехполюсник 2 для согласования источника сигнала 1 и высокочастотной нагрузки 7 по критерию обеспечения заданных модулей коэффициентов передачи высокочастотной части (до фильтра нижних частот) в двух состояниях, определяемых двумя уровнями амплитуды входного АМС, селекции сигнала и помехи. Разделительная емкость 5 устраняет постоянную составляющую. В результате на высокочастотной нагрузке 7 формируется АМС со скорректированным коэффициентом амплитудной модуляции. На низкочастотной нагрузке 6 устройства имеем низкочастотное колебание, амплитуда которого изменяется по закону изменения огибающей входного высокочастотного сигнала (амплитудно-модулированного колебания).
Недостатки способа-прототипа и устройства его реализации описаны выше.
Высокочастотная часть структурной обобщенной схемы предлагаемого устройства по п.2 (фиг.3) состоит из каскадно соединенных источника сигнала 1, реактивного четырехполюсника 2, двухполюсного (двухэлектродного) нелинейного элемента 3, включенного между четырехполюсником и высокочастотной нагрузкой 7 в поперечную цепь. Низкочастотная часть структурной схемы содержит ФНЧ 4, разделительную емкость 5 и низкочастотную нагрузку 6, источник низкочастотного управляющего сигнала - 11. Четырехполюсник выполнен в виде каскадно соединенных двух Г-образных звеньев (в общем из четырех двухполюсников с сопротивлениями x1(12), x2(13), x3(14), x4(15), значения любых трех из которых выбраны из условия одновременного обеспечения заданной коррекции коэффициента амплитудной модуляции принятого АМС в режиме демодуляции и обеспечения требуемого коэффициента амплитудной модуляции сформированного АМС в режиме модуляции путем реализации заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя уровнями соответствующего управляющего сигнала. Значения сопротивлений остальных двухполюсников выбраны из условия обеспечения физической реализуемости. Входное сопротивление ФНЧ на несущей частоте должно быть выбрано достаточно высоким, чтобы высокочастотную часть устройства можно было рассматривать и синтезировать независимо от низкочастотной части. Например, этому критерию удовлетворяет ФНЧ в виде Г-образного соединения L и С (L и R) элементов.
Принцип действия данного устройства состоит в том, что при подаче высокочастотного сигнала от источника 1 с сопротивлением z0 в результате специального выбора значений параметров классической матрицы передачи четырехполюсника 2 (значений сопротивлений двухполюсников) из условий обеспечения заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя крайними уровнями амплитуды управляющего сигнала, после прохождения его через высокочастотную часть заданным образом в режиме демодуляции корректируется коэффициент амплитудной модуляции высокочастотного сигнала, а в режиме модуляции формируется высокочастотный сигнал с заданным коэффициентом амплитудной модуляции. В режиме модуляции сформированный высокочастотный сигнал выделяется на высокочастотной нагрузке. Это симплексный режим. В режиме демодуляции спектр АМС разрушается при помощи нелинейного элемента 3, ФНЧ 4 выделяет низкочастотную составляющую, постоянная составляющая устраняется с помощью разделительной емкости 5. В результате низкочастотное колебание, амплитуда которого изменяется по закону огибающей АМС, выделяется на низкочастотной нагрузке 6. В режиме одновременного обеспечения функций модуляции и демодуляции (дуплексный режим) необходимо использовать два дополнительных источника поднесущих сигналов с различными частотами для приемного и передающего каналов (для режимов демодуляции и модуляции) и два дополнительных полосовых фильтра на эти частоты. Это очевидно и в формулу изобретения не включено.
Докажем возможность реализации указанных свойств.
Пусть на фиксированной частоте известны сопротивления источника сигнала Z0=r0+jx0, нагрузки Zн=rн+jxн и нелинейного элемента Z1,2=r1,2+jx1,2 в двух состояниях, определяемых двумя крайними уровнями амплитуды управляющего сигнала (в указанном выше широком смысле).
Требуется определить минимальное количество элементов и значения параметров схемы СФУ (реактивного четырехполюсника РЧ), при которых в двух заданных состояниях нелинейного элемента обеспечивались бы заданное отношение модулей m21 коэффициентов передачи:

Коэффициент амплитудной модуляции М амплитудно-модулированного сигнала определяются простым выражением:  .
.
Таким образом, с учетом условия взаимности (х12=-x21) СФУ может характеризоваться матрицей сопротивления

и соответствующей классической матрицей передачи:
где  - определитель матрицы (2).
- определитель матрицы (2).
Нелинейный элемент в первом и втором состояниях характеризуется следующей матрицей передачи:

Умножим матрицы (3) и (4). С учетом Z0, Zн найдем [Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. М.: Связь, 1971, с.34-36], получим выражение для нормированной классической матрицы передачи высокочастотной части устройства модуляции и демодуляции:

Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния с учетом (1.1.5), получим выражения для коэффициентов передачи:

Для получения взаимосвязей между элементами матрицы сопротивлений (2), оптимальных по критерию обеспечения требуемого закона изменения амплитуды и фазы проходного сигнала, подставим (6) в (1). После разделения комплексного уравнения на действительную амплитудную части, получим систему двух уравнений:

где A=A1m21+A2; B=B1m21+B2; C=m21-1; A1=-(rн+r1); A2=rн+r2; B1=-(xн+x1); B2=x2+xн.
Решение системы (8) имеет вид взаимосвязей между элементами матрицы сопротивлений:

где  ;
;  ;
;  .
.
Поскольку  , то подкоренное выражение в (8) положительно при D<0. Из этого неравенства следует условие физической реализуемости в виде ограничения:
, то подкоренное выражение в (8) положительно при D<0. Из этого неравенства следует условие физической реализуемости в виде ограничения:  .
.
Полученные две взаимосвязи (8) означают, что количество неуправляемых элементов должно быть не менее двух. Значения параметров этих элементов, оптимальных по критерию обеспечения требуемых значений m21, φ21, должны удовлетворять системе двух уравнений, формируемых на основе (8). Для этого необходимо взять пробную схему СФУ, найти матрицу сопротивлений этой схемы и представить ее в виде (2). Найденные таким образом элементы х11, х22, x21, выраженные через параметры схемы, нужно подставить в (8) и решить сформированную систему двух уравнений относительно выбранных двух параметров. Значения остальных параметров могут быть выбраны произвольно или исходя из каких-либо других физических соображений. Эти параметры могут также относиться к управляемой части, то есть участвовать в формировании Z1, Z2 (входить в коэффициенты D, Е, F).
Иногда удобнее полученные взаимосвязи (8) использовать в терминах элементов классической матрицы передачи. Воспользуемся известными соотношениями между элементами матрицы передачи и сопротивлений:

где  ;
;  ;
;  ; a, b, c, d - элементы классической матрицы передачи.
; a, b, c, d - элементы классической матрицы передачи.
Подставим (9) в (8). Для предлагаемого устройства в режимах модуляции и демодуляции получим искомые взаимосвязи:

где индекс m относится к режиму модуляции, а индекс d - к режиму демодуляции. При этом значения сопротивлений нелинейного элемента z1,2=r1,2+jx1,2 в двух состояниях в режиме модуляции в общем случае отличаются от значений сопротивлений нелинейного элемента z1,2=r1,2+jx1,2 в двух состояниях в режиме демодуляции. Поэтому при описании этих режимов сопротивлениями нелинейного элемента будем также использовать указанные индексы m, d (или один из индексов). Для того чтобы одновременно выполнялись функции амплитудных модуляторов и демодуляторов предлагаемым устройством, характеризующимся вариантом включения двухполюсного нелинейного элемента между СФУ и нагрузкой в продольную цепь в общем случае необходимо, чтобы взаимосвязи (10) были попарно равны (решения, полученные отдельно для двух режимов, сшиваются). Это приводит к ограничению на третий элемент классической матрицы передачи СФУ и на отношение модулей коэффициентов передачи в двух состояниях в одном из режимов, например в режиме демодуляции:

где  ;
;  ;
;  .
.
При этом в режиме модуляции будет обеспечено произвольно заданное отношение модулей коэффициентов передачи в двух состояниях. В случае необходимости обеспечения произвольного отношения модулей коэффициентов передачи в режиме демодуляции необходимо ограничить отношение модулей в режиме модуляции. Получится выражение для m21m, такое же, как и для m21d (11), но в формулах для x, y, z коэффициенты D, E, F будут иметь индекс d, а коэффициенты А, В - индекс m. Если крайние уровни управляющего сигнала для амплитудных модуляторов совпадают с крайними уровнями АМС на входе амплитудных демодуляторов, то ограничение на третий элемент γ не требуется. В этом случае Dd=Dm, Ed=Em, Fd=Fm, обе пары взаимосвязей (10) идентичны, а элемент γ можно выбирать произвольно или исходя из каких-либо других физических соображений.
Однако в общем случае для совместного выполнения функций модуляторов и демодуляторов СФУ должно содержать не менее чем три элемента (двухполюсника). Сопротивления остальных двухполюсников могут быть выбраны произвольно или исходя из каких-либо других физических соображений. Для отыскания выражений, определяющих оптимальные значения сопротивлений двухполюсников типовых схем СФУ, надо найти элементы их матриц передачи, представить их в виде (9), подставить в (10), (11) и решить сформированную таким образом систему трех уравнений относительно сопротивлений трех двухполюсников. В соответствии с изложенным алгоритмом получены выражения для отыскания оптимальных значений сопротивлений трех двухполюсников СФУ в виде схемы из четырех каскадно соединенных реактивных двухполюсников:

где α, β, γ определены с помощью (10), (11);  . Подкоренное выражение всегда положительно. Сопротивление х1 может быть выбрано произвольно или исходя из каких-либо других физических соображений.
. Подкоренное выражение всегда положительно. Сопротивление х1 может быть выбрано произвольно или исходя из каких-либо других физических соображений.
Для обеспечения заданных отношений модулей коэффициентов передачи устройства модуляции и демодуляции в двух состояниях нелинейного элемента одновременно на двух частотах необходимо сформировать двухполюсники с сопротивлениями х2, х3, х4 из не менее чем двух реактивных элементов, найти выражения для их сопротивлений, приравнять их к оптимальным значениям сопротивлений двухполюсников на заданных частотах и решить сформированную таким образом систему двух уравнений относительно двух выбранных реактивных элементов. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например из условия физической реализуемости. Пусть каждый из двухполюсников с сопротивлениями x2n, x3n, x4n сформирован из параллельно соединенных последовательного контура и произвольного двухполюсника (емкости или индуктивности) с сопротивлением Xkn (n - номер частоты ωn=2πfn; k - номер двухполюсника (фиг.5)).
Составим три системы двух уравнений:

Решение:

Если сопротивления x2n, x3n, x4n на обеих частотах имеют отрицательные знаки, то для получения физически реализуемых параметров по формулам (14) необходимо в качестве произвольного двухполюсника выбрать емкость  . Если сопротивления x2n, x3n, x4n на обеих частотах имеют положительные знаки, то для получения физически реализуемых параметров по формулам (14) необходимо в качестве произвольного двухполюсника выбрать индуктивность Xkn=ωnLk. Если сопротивления x2n, x3n, x4n на обеих частотах имеют разные знаки, то для получения физически реализуемых параметров по формулам (14) в качестве произвольного двухполюсника можно выбирать индуктивность или емкость.
. Если сопротивления x2n, x3n, x4n на обеих частотах имеют положительные знаки, то для получения физически реализуемых параметров по формулам (14) необходимо в качестве произвольного двухполюсника выбрать индуктивность Xkn=ωnLk. Если сопротивления x2n, x3n, x4n на обеих частотах имеют разные знаки, то для получения физически реализуемых параметров по формулам (14) в качестве произвольного двухполюсника можно выбирать индуктивность или емкость.
Выражение для коэффициента передачи в терминах элементов классической матрицы передачи для варианта включения управляемого элемента между СФУ и нагрузкой в поперечную цепь имеет вид:

Физически реализуемая передаточная функция связана с коэффициентом передачи простым соотношением: 
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение четырехполюсника реактивным в виде указанным выше способом соединенных между собой четырех двухполюсников, выбора значений их параметров из условия обеспечения заданных отношений модулей коэффициентов передачи в двух состояниях на двух заданных частотах при изменении состояния управляемого двухполюсного элемента, включенного между выходом реактивного четырехполюсника и нагрузкой в продольную цепь, обеспечивает демодуляцию амплитудно-модулированного сигнала с коррекцией его коэффициента амплитудной модуляции или амплитудную модуляцию несущего сигнала с заданным коэффициентом амплитудной модуляции и физическую реализуемость.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды, индуктивности и емкости, сформированные в заявленную схему реактивного четырехполюсника. Значения параметров индуктивностей и емкостей, а также значения отношения модулей коэффициентов передачи в двух состояниях в режиме демодуляции однозначно могут быть определены с помощью математических выражений, приведенных в формуле изобретения. В режиме модуляции отношение модулей коэффициентов передачи в двух состояниях может быть задано произвольно в пределах указанных границ.
Технико-экономическая эффективность предложенного устройства заключается в одновременном обеспечении заданных отношений модулей коэффициентов передачи устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя уровнями управляющего сигнала, на двух заданных частотах, что приводит к заданной коррекции коэффициента амплитудной модуляции входного АМС и к формированию АМС с заданным коэффициентом амплитудной модуляции в заданной полосе частот, что, в свою очередь, повышает помехоустойчивость приемника, уменьшает номенклатуру радиоустройств и унифицирует амплитудные модуляторы и демодуляторы.
Изобретение относится к радиосвязи и может быть использовано для формирования требуемых амплитудно-манипулированных или амплитудно-модулированных сигналов, а также для демодуляции указанных сигналов. Достигаемый технический результат - формирование амплитудно-манипулированных или амплитудно-модулированных сигналов, а также демодуляция указанных сигналов путем реализации заданных отношений модулей коэффициентов передачи в двух состояниях двухэлектродного нелинейного элемента, с помощью которого разлагают спектр амплитудно-модулированных сигналов. Способ амплитудной модуляции и демодуляции высокочастотных сигналов состоит в том, что между источником высокочастотных сигналов и низкочастотной нагрузкой включают устройство модуляции и демодуляции, которое выполняют из каскадно-соединенных согласующего четырехполюсника, двухэлектродного нелинейного элемента, высокочастотной нагрузки и фильтра нижних частот, согласующий четырехполюсник выполняют из реактивных двухполюсников, которые формируют из реактивных элементов, значения параметров реактивных элементов определяют из условия выбранных значений сопротивлений двухполюсников на заданном количестве частот. 2 н.п. ф-лы, 5 ил.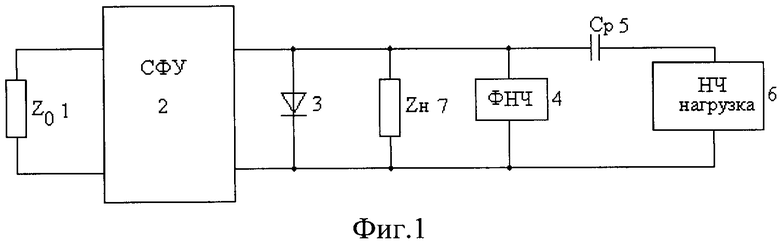
1. Способ амплитудной модуляции и демодуляции высокочастотных сигналов, состоящий в том, что устройство модуляции и демодуляции включают между источником высокочастотных сигналов и низкочастотной нагрузкой и выполняют его из каскадно-соединенных согласующего четырехполюсника, двухэлектродного нелинейного элемента, высокочастотной нагрузки и фильтра нижних частот, в режиме демодуляции с помощью нелинейного элемента разлагают спектр амплитудно-модулированных сигналов, корректируют их коэффициент амплитудной модуляции, с помощью фильтра нижних частот выделяют информационный низкочастотный сигнал, амплитуда которого изменяется по закону изменения амплитуды высокочастотного сигнала, четырехполюсник выполняют из числа реактивных двухполюсников, не меньшего трех, отличающийся тем, что нелинейный элемент включают в продольную цепь, в режиме модуляции изменяют амплитуду высокочастотного сигнала по закону изменения амплитуды управляющего сигнала, значения сопротивлений двухполюсников выбирают из условия одновременного обеспечения заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды управляющего сигнала, на заданном количестве частот, причем в режиме демодуляции в качестве управляющего сигнала используют огибающую входного амплитудно-модулированного сигнала, двухполюсники формируют из числа реактивных элементов, не меньшего заданного числа частот, значения параметров элементов определяют из условия реализации выбранных значений сопротивлений двухполюсников на заданном количестве частот, сформированный в режиме модуляции высокочастотный сигнал снимают с высокочастотной нагрузки.
2. Устройство модуляции и демодуляции высокочастотных сигналов, состоящее из каскадно-соединенных согласующего четырехполюсника, двухэлектродного нелинейного элемента, высокочастотной нагрузки и фильтра нижних частот, отличающееся тем, что нелинейный элемент включен в продольную цепь, к нелинейному элементу подключен источник управляющего сигнала, фильтр нижних частот выполнен в виде Г-образного соединения элементов L и С, значения которых выбраны из условия обеспечения большого его входного сопротивления на частоте высокочастотного сигнала, четырехполюсник выполнен из четырех реактивных двухполюсников, соединенных по лестничной схеме в виде двух Г-образных соединений, каждый двухполюсник сформирован из трех реактивных элементов, при этом значения сопротивлений x2n, x3n, x4n второго, третьего и четвертого двухполюсников выбраны из условия одновременного обеспечения заданных отношений модулей коэффициентов передачи высокочастотной части устройства модуляции и демодуляции в двух состояниях нелинейного элемента, определяемых двумя значениями амплитуды управляющего сигнала или двумя уровнями амплитудно-модулированного сигнала, на заданных двух частотах, второй, третий и четвертый двухполюсники сформированы из параллельно соединенных между собой последовательного контура L1k, C1k и дополнительного реактивного двухполюсника с сопротивлением Xkn, значения параметров элементов двухполюсников определены из условия реализации выбранных значений сопротивлений x2n, x3n, x4n двухполюсников на этих частотах:


где α=(x0-Ed)γ-Dd; β=Fdγ-Ed-x0; 
 A=A1m21+A2; B=B1m21+B2;
A=A1m21+A2; B=B1m21+B2;
A1=-(rн+r1); A2=rн+r2; B1=-(xн+x1); B2=xн+x2; С=-(1-m21);
 Ad=A1dm21d+A2d; Bd=B1dm21d+B2d;
Ad=A1dm21d+A2d; Bd=B1dm21d+B2d;
A1d=-(rн+r1d); A2d=rн+r2d; B1d=-(xн+x1d); B2d=xн+x2d; C=-(1-m21d); 


 причем каждый дополнительный двухполюсник формируется из емкости
причем каждый дополнительный двухполюсник формируется из емкости  при x2n,3n,4n<0 или из индуктивности Xkn=ωnLk при x2,3,4>0 на обеих частотах, а в других случаях - либо из емкости, либо из индуктивности; r1,2, x1,2 - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме модуляции в двух состояниях, определяемых двумя значениями амплитуды управляющего сигнала; r1d,2d, x1d,2d - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме демодуляции в двух состояниях, определяемых двумя значениями амплитуды входного сигнала; m21 - заданное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме модуляции; m21d - расчетное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме демодуляции; n=1, 2; m=2, 3, 4 - номер частоты и номер двухполюсника; r0, х0, rнхн - заданные действительные и мнимые составляющие сопротивлений источника сигнала и нагрузки на заданных частотах ω1,2=2πf1,2; сопротивление x1n первого двухполюсника выбрано произвольно с исключением случая короткого замыкания;
при x2n,3n,4n<0 или из индуктивности Xkn=ωnLk при x2,3,4>0 на обеих частотах, а в других случаях - либо из емкости, либо из индуктивности; r1,2, x1,2 - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме модуляции в двух состояниях, определяемых двумя значениями амплитуды управляющего сигнала; r1d,2d, x1d,2d - заданные действительные и мнимые составляющие сопротивления двухполюсного нелинейного элемента в режиме демодуляции в двух состояниях, определяемых двумя значениями амплитуды входного сигнала; m21 - заданное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме модуляции; m21d - расчетное отношение модулей коэффициентов передачи устройства в двух состояниях в режиме демодуляции; n=1, 2; m=2, 3, 4 - номер частоты и номер двухполюсника; r0, х0, rнхн - заданные действительные и мнимые составляющие сопротивлений источника сигнала и нагрузки на заданных частотах ω1,2=2πf1,2; сопротивление x1n первого двухполюсника выбрано произвольно с исключением случая короткого замыкания; 

 - расчетные оптимальные значения отношений элементов а, b, с, d классической матрицы передачи реактивного четырехполюсника.
- расчетные оптимальные значения отношений элементов а, b, с, d классической матрицы передачи реактивного четырехполюсника.
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341888C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341886C1 |
| УСТРОЙСТВА ДЕМОДУЛЯЦИИ ФАЗОМОДУЛИРОВАННЫХ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2341882C1 |
| US 4207525 А, 10.06.1980 | |||
| US 6850575 B1, 01.02.2005. | |||

