Предлагаемое изобретение относится к области измерительной техники и микросистемной техники, а более конкретно к интегральным измерительным элементам величин угловой скорости и ускорения.
Известен интегральный микромеханический гироскоп [В.П.Тимошенков, С.П.Тимошенков, А.А.Миндеева. Разработка конструкции микрогироскопа на основе КНИ-технологии. - Известия вузов, Электроника, №6, 1999, стр.49, рис.2], содержащий диэлектрическую подложку с напыленными на ней четырьмя электродами и инерционную массу, расположенную с зазором относительно диэлектрической подложки. выполненную в виде пластины из полупроводникового материала, образующую с парой напыленных на подложку электродов плоский конденсатор и связанную с внутренней колебательной системой с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами жестко прикреплены к инерционной массе, а другими к внутренней колебательной системе, выполненной из полупроводникового материала, образующей с другой парой напыленных на подложку электродов плоский конденсатор, используемый в качестве электростатического привода, причем колебательная система соединена с внешней рамкой с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами прикреплены к внутренней колебательной системе, а другими - к внешней рамке, выполненной из полупроводникового материала и расположенной непосредственно на диэлектрической подложке.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Признаками аналога, совпадающими с существенными признаками, являются два неподвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, прямоугольная рамка, инерционная масса, выполненная из полупроводникового материала и расположенная с зазором относительно подложки, упругие балки, выполненные из полупроводникового материала и расположенных с зазором относительно подложки, электрод, расположенный непосредственно на подложке.
Недостатком конструкции гироскопа является невозможность измерения величин угловой скорости вокруг взаимно перпендикулярных осей X, Y, расположенных в плоскости подложки, и ускорения по осям Х, Y, Z.
Функциональным аналогом заявляемого объекта является микромеханический гироскоп [S.E.Alper, Т.Akin, A.Planar Gyroscope Using a Standard Surface Micromachining Process, The 14th European Conference on Solid-State Transducers (EUROSENSORS XIV), 2000, p.387, fig.1], содержащий подложку с расположенными на ней четырьмя электродами, выполненными из полупроводникового материала, инерционную массу, расположенную с зазором относительно подложки, выполненную в виде пластины из полупроводникового материала, образующую с нарой расположенных на подложке электродов плоский конденсатор и связанную с внешним подвесом с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами жестко прикреплены к инерционной массе, а другими - к внешнему подвесу, выполненному из полупроводникового материала и образующему с другой парой расположенных на подложке электродов плоский конденсатор, используемый в качестве электростатического привода, причем внешний подвес соединен с опорами с помощью упругих балок, выполненных из полупроводникового материала, которые одними концами жестко соединены с внешним подвесом, а другими - с опорами, выполненными из полупроводникового материала и расположенными непосредственно на подложке, и два электрода, выполненные из полупроводникового материала и расположенные непосредственно на подложке с зазором относительно внешнего подвеса так, что образуют плоские конденсаторы, используемые в качестве электростатических приводов.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, направленной перпендикулярно плоскости подложки гироскопа.
Признаками аналога, совпадающими с существенными признаками, являются два неподвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно па полупроводниковой подложке, прямоугольная рамка, инерционная масса, выполненная из полупроводникового материала и расположенная с зазором относительно подложки, неподвижный электрод емкостного преобразователя перемещений, выполненный из полупроводникового материала, расположенный на подложке, упругие балки, выполненные из полупроводникового материала и расположенные с зазором относительно подложки.
Недостатком конструкции гироскопа является невозможность измерения величин угловой скорости вокруг взаимно перпендикулярных осей X, Y, расположенных в плоскости подложки, и ускорения по осям X, Y, Z.
Из известных наиболее близким по технической сущности к заявляемому объекту является интегральный микромеханический гироскоп [A.S.Plani, A.A.Seshia, M.Palaniapan, R.Т.Howe, J.Yasaitis, Coupling of resonant modes in micromechanical vibratory rate gyroscopes, NSTI-Nanotech 2004, vol.2, 2004, p.335, fig.1], содержащий полупроводниковую подложку с расположенными на ней двумя планарными неподвижными электродами, выполненными из полупроводникового материала, два неподвижных электрода с гребенчатыми структурами с одной стороны, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, прямоугольную рамку, выполненную из полупроводникового материала, соединенную с опорами с помощью четырех упругих балок, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, которые одними концами жестко прикреплены к прямоугольной рамке, а другими - к опорам, инерционную массу, выполненную из полупроводникового материала и расположенную с зазором относительно подложки, образующую с расположенными на полупроводниковой подложке двумя планарными неподвижными электродами плоские конденсаторы в плоскости их пластин через боковые зазоры, соединенную с прямоугольной рамкой с помощью других четырех упругих балок, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, которые одними концами жестко прикреплены к инерционной массе, а другими - к прямоугольной рамке.
Данный гироскоп позволяет измерять величину угловой скорости при вращении его вокруг оси Z, расположенной перпендикулярно плоскости подложки.
Признаками прототипа, совпадающими с существенными признаками, являются полупроводниковая подложка с расположенными на ней планарными неподвижными электродами, выполненными из полупроводникового материала, два неподвижных электрода с гребенчатыми структурами с одной стороны, выполненные из полупроводниковою материала и расположенные непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, прямоугольная рамка, выполненная из полупроводникового материала, соединенная с опорами с помощью четырех упругих балок, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, инерционная масса, выполненная из полупроводникового материала и расположенная с зазором относительно подложки, другие четыре упругие балки, выполненные из полупроводникового материала и расположенные с зазором относительно подложки.
Причинами, препятствующими достижению технического результата, является невозможность измерения величин угловой скорости вокруг взаимно перпендикулярных осей X, Y, расположенных в плоскости подложки, и ускорения по осям X, Y, Z.
Задача предлагаемого изобретения - возможность измерения величин угловой скорости и ускорения вдоль осей X, Y, расположенных в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки гироскопа-акселерометра.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, заключается в возможности измерения величин угловой скорости и ускорения вокруг осей X, Y, расположенных в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки гироскопа-акселерометра.
Технический результат достигается за счет введения двух подвижных электродов, выполненных из полупроводникового материала в виде пластин с гребенчатыми структурами с одной стороны и расположенных с зазором относительно полупроводниковой подложки, дополнительного неподвижного электрода, выполненного из полупроводникового материала и расположенного непосредственно на подложке, четырех дополнительных упругих балок, выполненных из полупроводникового материала и расположенных с зазором относительно полупроводниковой подложки, причем планарные неподвижные электроды образуют плоские конденсаторы в плоскости их пластин через боковые зазоры с прямоугольной рамкой.
Для достижения необходимого технического результата в интегральный микромеханический гироскоп-акселерометр, содержащий полупроводниковую подложку с расположенными на ней планарными неподвижными электродами, выполненными из полупроводникового материала, два неподвижных электрода с гребенчатыми структурами с одной стороны, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, прямоугольную рамку, выполненную из полупроводникового материала, соединенную с опорами с помощью четырех упругих балок, расположенных с зазором относительно подложки, инерционную массу, выполненную из полупроводникового материала и расположенную с зазором относительно подложки, другие четыре упругие балки, выполненные из полупроводникового материала и расположенных с зазором относительно подложки, введены слой дополнительной инерционной массы, выполненный из полупроводникового материала и расположенный непосредственно на инерционной массе, дополнительная прямоугольная рамка, выполненная из полупроводникового материала и расположенная непосредственно на прямоугольной рамке, два подвижных электрода, выполненных из полупроводникового материала в виде пластин с гребенчатыми структурами с одной стороны и расположенных с зазором относительно полупроводниковой подложки, дополнительный неподвижный электрод, выполненный из полупроводникового материала и расположенный непосредственно на подложке, четыре дополнительные упругие балки, расположенные с зазором относительно полупроводниковой подложки, шесть элементов крепления, выполненных из полупроводникового материала, четыре из которых расположены непосредственно на опорах, а два других - на двух подвижных электродах, причем планарные неподвижные электроды образуют плоские конденсаторы в плоскости их пластин через боковые зазоры с прямоугольной рамкой, а упругие балки выполнены на основе углеродных нанотрубок, четыре из которых соединены одними концами с помощью слоя дополнительной инерционной массы с инерционной массой, а другими концами с помощью дополнительной прямоугольной рамки с прямоугольной рамкой, а четыре другие упругие балки соединены одними концами с помощью двух элементов креплений с подвижными электродами, а другими концами с помощью других четырех элементов креплений с опорами.
Сравнивая предлагаемое устройство с прототипом, видим, что оно содержит новые признаки, то есть соответствует критерию новизны. Приводя сравнение с аналогами, приходим к выводу, что предлагаемое устройство соответствует критерию «существенные отличия», так как в аналогах не обнаружены предъявляемые новые признаки.
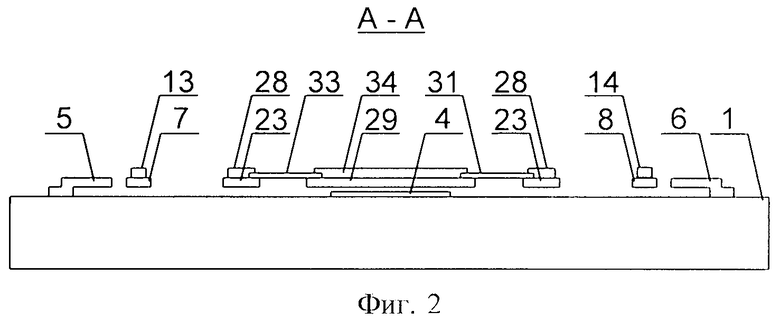
На Фиг.1 приведена топология предлагаемого интегрального микромеханического гироскопа-акселерометра на основе углеродных нанотрубок и показаны сечения. На Фиг.2 приведена структура предлагаемого интегрального микромеханического гироскопа-акселерометра на основе углеродных нанотрубок.
Интегральный микромеханический гироскоп-акселерометр на основе углеродных нанотрубок (Фиг.1) содержит полупроводниковую подложку 1 с расположенными на ней двумя планарными неподвижными электродами 2, 3, и неподвижным электродом 4, выполненными из полупроводникового материала, два неподвижных электрода с гребенчатыми структурами с одной стороны 5, 6, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке 1, два подвижных электрода электростатических приводов с гребенчатыми структурами с одной стороны 7, 8, выполненных в виде пластин из полупроводникового материала и расположенных с зазором относительно полупроводниковой подложки 1, образующих электростатическое взаимодействие с неподвижными электродами 5, 6 в плоскости их пластин через боковые зазоры и взаимопроникающие друг в друга гребенками электродов, и связанных с полупроводниковой подложкой 1 с помощью упругих балок 9, 10, 11, 12, выполненных на основе углеродных нанотрубок, которые одними концами жестко соединены при помощи элементов крепления 13, 14, выполненных из полупроводникового материала, с подвижными электродами электростатических приводов 7, 8, а другими - с опорами 15, 16, 17, 18, выполненными из полупроводникового материала и расположенными непосредственно на полупроводниковой подложке 1, при помощи элементов крепления 19, 20, 21, 22, выполненных из полупроводникового материала, прямоугольную рамку 23, выполненную из полупроводникового материала и расположенную с зазором относительно полупроводниковой подложки 1, образующую с двумя неподвижными электродами 2, 3 плоские конденсаторы в плоскости их пластин и через боковые зазоры, соединенную с подвижными электродами 7, 8 с помощью четырех упругих балок 24, 25, 26, 27, выполненных на основе углеродных нанотрубок, которые одними концами жестко соединены при помощи дополнительной прямоугольной рамки 28, выполненной из полупроводникового материала, с прямоугольной рамкой 23, а другими - с подвижными электродами 7, 8, инерционную массу 29, выполненную из полупроводникового материала и расположенную с зазором относительно полупроводниковой подложки 1, образующую с неподвижным электродом 4 плоский конденсатор, соединенную с прямоугольной рамкой 23 с помощью четырех упругих балок 30, 31, 32, 33, выполненных на основе углеродных нанотрубок, которые одними концами жестко соединены при помощи дополнительной инерционной массы 34, выполненной из полупроводникового материала, с инерционной массой 29, а другими - с прямоугольной рамкой 23.
Работает устройство следующим образом.
При подаче на неподвижные электроды 5, 6 переменных напряжений, сдвинутых относительно друг друга по фазе на 180°, относительно подвижных электродов 7, 8 между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний последних в плоскости полупроводниковой подложки 1 (вдоль оси Y), за счет s-образного изгиба упругих балок 9, 10, 11, 12, которые одними концами жестко соединены с помощью элементов креплений 13, 14 с подвижными электродами 7, 8, а другими концами с помощью элементов креплений 19, 20, 21, 22 - с опорами 15, 16, 17, 18, соответственно. Колебания подвижных электродов 7, 8 передаются прямоугольной рамке 23 через упругие балки 24, 25, 26, 27, которые одними концами жестко соединены с помощью элементов креплений 13, 14 с подвижными электродами 7, 8, а другими концами с помощью дополнительной прямоугольной рамки 29 - с прямоугольной рамкой 23, колебания которой передаются инерционной массе 29 через упругие балки 30, 31, 32, 33, которые одними концами жестко соединены с помощью дополнительной прямоугольной рамки 29 с прямоугольной рамкой 23, а другими концами с помощью дополнительной инерционной массы 34 с инерционной массой 29. Зазор между планарными неподвижными электродами 2, 3 и прямоугольной рамкой 23, и неподвижным электродом 4 и инерционной массой 29, соответственно, не изменяется. Напряжения, генерируемые в парах емкостных преобразователей перемещений, образованных планарными неподвижными электродами 2, 3 и прямоугольной рамкой 23, и неподвижным электродом 4 и инерционной массой 29, соответственно, одинаковы.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг оси, расположенной в плоскости полупроводниковой подложки 1 (ось X), инерционная масса 29 под действием сил Кориолиса начинает совершать колебания перпендикулярно плоскости полупроводниковой подложки 1 за счет s-образного изгиба упругих балок 30, 31, 32, 33. Разность напряжений, генерируемых на емкостном преобразователе перемещений, образованных неподвижным электродом 4 и инерционной массой 29, за счет изменения величины затора между ними, характеризует величину угловой скорости. Напряжения, генерируемые па емкостных преобразователях перемещений, образованных электродами 2, 3 и прямоугольной рамкой 23, соответственно, одинаковы.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг оси, расположенной перпендикулярно плоскости полупроводниковой подложки 1 (ось Z), инерционная масса 29 под действием сил Кориолиса начинает совершать колебания в плоскости полупроводниковой подложки 1 (вдоль оси X) за счет s-образного изгиба упругих балок 24, 25, 26, 27. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных планарными неподвижными электродами 2, 3 и прямоугольной рамкой 23, за счет изменения величины зазора между ними, характеризует величину угловой скорости. Напряжения, генерируемые в емкостном преобразователе перемещений, образованном электродом 4 и инерционной тонной массой 29, одинаковы.
При подаче на планарные неподвижные электроды 2, 3 переменных напряжений, сдвинутых относительно друг друга на фазе на 180°, относительно прямоугольной рамки 23 между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний последней в плоскости полупроводниковой подложки 1 (вдоль оси X) за счет s-образного изгиба упругих балок 24, 25, 26, 27, соединяющих прямоугольной рамку 23 с подвижными электродами 7, 8. Колебания прямоугольной рамки 23 передаются инерционной массе 29 через упругие балки 30, 31, 32, 33. Зазор между неподвижным электродом 4 и инерционной массой 29, соответственно, не изменяется. Зазор между неподвижными электродами 5, 6 и подвижными электродами 7, 8, соответственно, не изменяется. Напряжения, генерируемые в парах емкостных преобразователей перемещений, образованных неподвижным электродом 4 и инерционной массой 29, и неподвижными электродами 5, 6 и подвижными электродами 7, 8, соответственно, одинаковы.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг оси, расположенной в плоскости полупроводниковой подложки 1 (ось Y), инерционная масса 29 под действием сил Кориолиса начинает совершать колебания перпендикулярно плоскости полупроводниковой подложки 1 за счет s-образного изгиба упругих балок 30, 31, 32, 33. Разность напряжений, генерируемых на емкостном преобразователе перемещений, образованных неподвижным электродом 4 и инерционной массой 29 за счет изменения величины зазора между ними, характеризует величину угловой скорости. Зазор между неподвижными электродами 5, 6 и подвижными электродами 7, 8, соответственно, не изменяется.
При возникновении вращения полупроводниковой подложки 1 (угловой скорости) вокруг оси, расположенной перпендикулярно плоскости полупроводниковой подложки 1 (ось Z), инерционная масса 29 под действием сил Кориолиса начинает совершать колебания в плоскости полупроводниковой подложки 1 (вдоль оси Y). Колебания инерционной массы 29 передаются прямоугольной рамке 23 через упругие балки 30, 31, 32, 33, а колебания прямоугольной рамки, в свою очередь, передаются подвижным электродам 7, 8 через упругие балки 24, 25, 26, 27, соответственно. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных неподвижными электродами 5, 6 и подвижными электродами 7, 8, соответственно, за счет изменения величины зазора между ними характеризует величину угловой скорости. Зазор между планарными неподвижными электродами 2, 3 и прямоугольной рамкой 23, и неподвижным электродом 4 и инерционной массой 29, соответственно, не изменяется. Напряжения, генерируемые в парах емкостных преобразователей перемещений, образованных планарными неподвижными электродами 2, 3 и прямоугольной рамкой 23, и неподвижным электродом 4 и инерционной массой 29, соответственно, одинаковы.
При возникновении ускорения полупроводниковой подложки 1 вдоль оси X, расположенной в плоскости полупроводниковой подложки 1, инерционная масса 29, жестко прикрепленная к прямоугольной рамке 23 при помощи упругих балок 30, 31, 32, 33, под действием сил инерции начинает перемещаться вдоль оси Х в плоскости полупроводниковой подложки 1, за счет s-образного изгиба упругих балок 24, 25, 26, 27, которые одними концами жестко соединены с прямоугольной рамкой 23, а другими с подвижными электродами 7, 8, соответственно. Разность напряжений, генерируемых в парах емкостных преобразователей перемещений, образованных электродами 2, 3 и прямоугольной рамкой 23, соответственно, за счет изменения величины зазора между ними, характеризует величину ускорения.
При возникновении ускорения полупроводниковой подложки 1 вдоль оси Y, расположенной в плоскости полупроводниковой подложки 1, инерционная масса 29 под действием сил инерции начинает перемещаться вдоль оси Y в плоскости полупроводниковой подложки 1, за счет s-образного изгиба упругих балок 9, 10, 11, 12, которые одними концами жестко соединены с подвижными электродами 7, 8, а другими - с опорами 15, 16, 17, 18, соответственно. Разность напряжений, генерируемых в парах емкостных преобразователей перемещений, образованных неподвижными электродами 5, 6 и подвижными электродами 7, 8, соответственно, за счет изменения величины зазора между ними, характеризует величину ускорения.
При возникновении ускорения полупроводниковой подложки 1 вдоль оси Z, направленной перпендикулярно плоскости полупроводниковой подложки 1, инерционная масса 29, под действием сил инерции начинает перемещаться перпендикулярно плоскости полупроводниковой подложки 1, за счет s-образного изгиба упругих балок 30, 31, 32, 33. Напряжения, генерируемые на емкостных преобразователях перемещений, образованных неподвижным электродом 4 и инерционной массой 29 за счет изменения величины зазора между ними, характеризуют величину ускорения.
Таким образом, предлагаемое устройство представляет собой интегральный микромеханический гироскоп-акселерометр, позволяющий измерять величины угловой скорости и ускорения вдоль осей X, Y, расположенных в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки гироскопа-акселерометра.
Введение слоя дополнительной инерционной массы, выполненного из полупроводникового материала и расположенного непосредственно на инерционной массе, дополнительной прямоугольной рамки, выполненной из полупроводникового материала и расположенной непосредственно на прямоугольной рамке, двух подвижных электродов, выполненных из полупроводникового материала в виде пластин с гребенчатыми структурами с одной стороны и расположенных с зазором относительно полупроводниковой подложки, дополнительного неподвижного электрода, выполненного из полупроводникового материала и расположенного непосредственно на подложке, четырех дополнительных упругих балок, расположенных с зазором относительно полупроводниковой подложки, шести элементов крепления, выполненных из полупроводникового материала, четыре из которых расположены непосредственно на опорах, а два других - на двух подвижных электродах, причем планарные неподвижные электроды образуют плоские конденсаторы в плоскости их пластин через боковые зазоры с прямоугольной рамкой, а упругие балки выполнены на основе углеродных нанотрубок, четыре из которых соединены одними концами с помощью слоя дополнительной инерционной массы с инерционной массой, а другими концами с помощью дополнительной прямоугольной рамки - с прямоугольной рамкой, а четыре других упругих балок соединены одними концами с помощью двух элементов креплений с подвижными электродами, а другими концами с помощью других четырех элементов креплений - с опорами, позволяет измерять величины угловой скорости и ускорения вдоль осей X, Y, расположенных в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки гироскопа-акселерометра, что позволяет использовать предлагаемое изобретение в качестве интегрального измерительного элемента величин угловой скорости и ускорения.
Таким образом, по сравнению с аналогичными устройствами предлагаемый интегральный микромеханический гироскоп-акселерометр позволяет сократить площадь подложки, используемую под размещение измерительных элементов величин угловой скорости и ускорения, так как для измерения величин угловой скорости и ускорения по трем осям X, Y, Z используется только один интегральный микромеханический гироскоп-акселерометр, а также за счет использования упругих балок, выполненных на основе углеродных нанотрубок, обладающих одинаковыми моментами инерции сечения, что в свою очередь позволяет повысить и получить равную чувствительность предложенного измерительного устройства по осям X, Y, Z к угловой скорости и ускорению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2007 |
|
RU2334237C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2300773C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2353903C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2011 |
|
RU2477863C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2005 |
|
RU2293337C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2016 |
|
RU2649249C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2015 |
|
RU2597953C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
Изобретение относится к области измерительной техники и микросистемной техники, а более конкретно к интегральным измерительным элементам величин угловой скорости и ускорения. Техническим результатом является возможность измерения величин угловой скорости и ускорения вдоль осей Х и Y, расположенных взаимно перпендикулярно в плоскости подложки, и оси Z, направленной перпендикулярно плоскости подложки. Технический результат достигается за счет введения слоя дополнительной инерционной массы, выполненного из полупроводникового материала и расположенного непосредственно на инерционной массе, дополнительной прямоугольной рамки, выполненной из полупроводникового материала и расположенной непосредственно на прямоугольной рамке, двух подвижных электродов, выполненных из полупроводникового материала в виде пластин с гребенчатыми структурами с одной стороны и расположенных с зазором относительно полупроводниковой подложки, дополнительного неподвижного электрода, выполненного из полупроводникового материала и расположенного непосредственно на подложке, четырех дополнительных упругих балок, расположенных с зазором относительно полупроводниковой подложки, шести элементов крепления, выполненных из полупроводникового материала, четыре из которых расположены непосредственно на опорах, а два других - на двух подвижных электродах, причем планарные неподвижные электроды образуют плоские конденсаторы в плоскости их пластин через боковые зазоры с прямоугольной рамкой, а упругие балки выполнены на основе углеродных нанотрубок. 2 ил.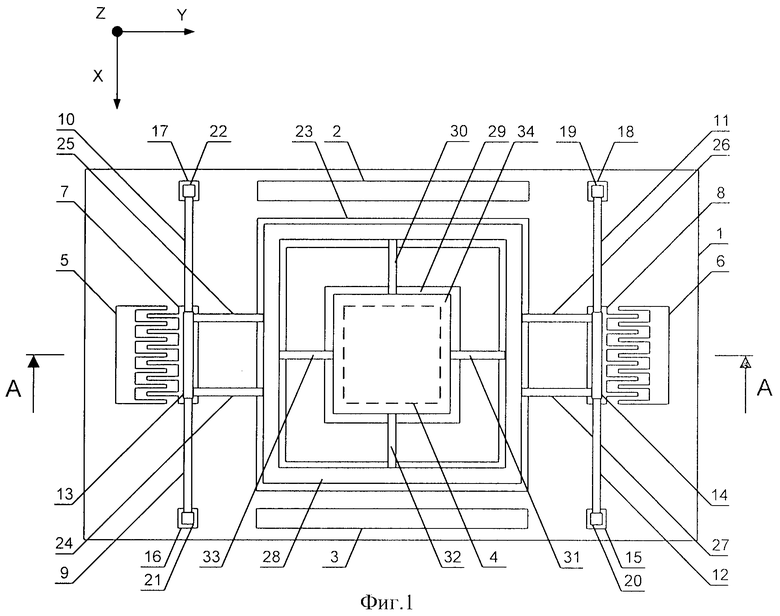
Интегральный микромеханический гироскоп-акселерометр, содержащий полупроводниковую подложку с расположенными на ней планарными неподвижными электродами, выполненными из полупроводникового материала, два неподвижных электрода с гребенчатыми структурами с одной стороны, выполненных из полупроводникового материала и расположенных непосредственно на полупроводниковой подложке, четыре опоры, выполненные из полупроводникового материала и расположенные непосредственно на полупроводниковой подложке, прямоугольную рамку, выполненную из полупроводникового материала, соединенную с опорами с помощью четырех упругих балок, выполненных из полупроводникового материала и расположенных с зазором относительно подложки, инерционную массу, выполненную из полупроводникового материала и расположенную с зазором относительно подложки, другие четыре упругие балки, выполненные из полупроводникового материала и расположенные с зазором относительно подложки, отличающийся тем, что в него введены слой дополнительной инерционной массы, выполненный из полупроводникового материала и расположенный непосредственно на инерционной массе, дополнительная прямоугольная рамка, выполненная из полупроводникового материала и расположенная непосредственно на прямоугольной рамке, два подвижных электрода, выполненных из полупроводникового материала в виде пластин с гребенчатыми структурами с одной стороны и расположенных с зазором относительно полупроводниковой подложки, дополнительный неподвижный электрод. выполненный из полупроводникового материала и расположенный непосредственно на подложке, четыре дополнительные упругие балки, расположенные с зазором относительно полупроводниковой подложки, шесть элементов крепления, выполненных из полупроводникового материала, четыре из которых расположены непосредственно на опорах, а два других - на двух подвижных электродах, причем планарные неподвижные электроды образуют плоские конденсаторы в плоскости их пластин через боковые зазоры с прямоугольной рамкой, а упругие балки выполнены на основе углеродных нанотрубок, четыре из которых соединены одними концами с помощью слоя дополнительной инерционной массы с инерционной массой, а другими концами с помощью дополнительной прямоугольной рамки - с прямоугольной рамкой, а четыре другие упругие балки соединены одними концами с помощью двух элементов креплений с подвижными электродами, а другими концами с помощью других четырех элементов креплений - с опорами.
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351897C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2007 |
|
RU2334237C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2006 |
|
RU2304273C1 |
| US 5353656 A, 11.10.1994 | |||
| CN 101382425 A, 11.03.2009. | |||

