Изобретения относятся к защите электрических линий от аварий, а именно к автоматической компенсации емкостных токов замыкания на землю в сетях с изолированной нейтралью, и могут быть использованы для снижения этих токов до безопасных величин и для снижения уровня перенапряжений, воздействующих на изоляцию всей гальванически связанной сети.
Наиболее близким к предлагаемому является способ автоматической настройки плунжерного дугогасящего реактора, реализованный в устройстве для автоматической настройки ДГР по авторскому свидетельству СССР, №1302376, H02J 3/18, 07.04.87 г., в соответствии с которым при отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети, которое включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного опорного напряжения, в качестве которой выбирают фазу линейное напряжение, и изменение индуктивности ДГР перемещением плунжера в соответствии с величиной и знаком расстройки до получения резонанса. При этом напряжение на нейтрали 3U0 измеряют на измерительном трансформаторе напряжения. При превышении напряжения на нейтрали больше допустимого значения или при возникновении ОЗЗ автоматическую подстройку реактора в резонанс прекращают до восстановления нормального режима работы сети
Недостаток способа, наиболее близкого к предлагаемому, заключается в следующем. Известно, что в действительности в нормальном режиме работы сети всегда присутствует естественная несимметрия сети, которая обусловлена различным расположением проводов на опорах, неравномерным распределением по фазам конденсаторов для защиты вращающихся машин, конденсаторов связи и прочей работой технологического оборудования. Естественная несимметрия сети, величина которой, по своей природе, нестабильна во времени, обуславливает постоянное наличие некомпенсируемой погрешности при настройке ДГР, приводящей к ложному действию, что не только снижает точность резонансной настройки ДГР, но делает ее неопределенной во времени. Известный способ не позволяет принимать во внимание наличие в сети естественной несимметрии и поддерживать суммарную величину несимметрии на уровне, обеспечивающем корректную работу фазового метода регулирования ДГР. Это снижает эффективность использования предварительной настройки ДГР в нормальном режиме в резонанс с емкостью сети. В результате, снижается точность настройки в резонанс, повышаются величины токов замыкания на землю и уровни перенапряжений, воздействующих на изоляцию всей гальванически связанной сети при ОЗЗ, что снижает надежность работы электрической сети.
Кроме того, в известном способе используют в качестве входных данных для контроля и измерения расстройки напряжение 3U0, снимаемое с измерительного трансформатора напряжения, что дает большую погрешность в измерениях. Это объясняется тем, что сигнал 3U0 с разомкнутого треугольника, формируемый как сумма трех больших векторов напряжений, при низких значениях напряжения в нормальном режиме (возможно, доли вольта при расстройке) может иметь очень большую погрешность как по амплитуде, так и по фазе. В результате, снижается точность настройки в резонанс, а следовательно, надежность работы электрической сети. Причем, этот же недостаток не позволяет даже грубо определить положение плунжера, так как для этого требуется достаточно точно знать величины напряжения и тока именно на обмотке ДГР. При этом способ предусматривает работу только с конкретным типом ДГР, имеющим строго заданные рабочие параметры. В результате сужаются функциональные возможности известного способа.
Таким образом, выявленный в результате патентного поиска наиболее близкий к предлагаемому способ автоматической настройки плунжерного дугогасящего реактора при осуществлении не позволяет достичь технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей и в повышении надежности работы электрической сети.
Выполненный патентный поиск в отношении устройства для автоматической настройки дугогасящего реактора, осуществляющего заявленный способ, показал следующее.
Наиболее близким к предлагаемому является устройство для автоматической настройки дугогасящего реактора, содержащее плунжерный дугогасящий реактор (ДГР), содержащий основную обмотку, первый вывод которой подключен к нейтрали сети, а второй заземлен; блок управления, подключенный к выходу блока управления управляемый коммутатор, выход которого является выходом управления плунжером ДГР; измерительный трансформатор напряжения, подключенный первым, вторым и третьим входами параллельно к фазам распределительной линии А, Б и С соответственно, а выходами подключен к входам блока управления. Кроме того, в блок управления с измерительного трансформатора напряжения подается напряжение нейтрали 3U0. Блок управления выполняет измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного линейного напряжения, и формирует управляющие сигналы для управляемого коммутатора на изменение индуктивности ДГР, путем перемещения плунжера, в соответствии с величиной и знаком расстройки до получения резонанса, При превышении напряжением на нейтрали значения 3U0max, соответствующего максимальному допустимому, или при возникновении ОЗЗ блок управления фиксирует положение плунжера и прекращает автоматическую подстройку реактора в резонанс до восстановления нормального режима работы сети (авторское свидетельство, СССР, №1302376, H02J 3/18, 07.04.87 г.).
Недостаток устройства, наиболее близкого к предлагаемому, заключается в следующем. Известно, что в действительности в нормальном режиме работы сети всегда присутствует естественная несимметрия, которая обусловлена различным расположением проводов на опорах, неравномерным распределением по фазам конденсаторов для защиты вращающихся машин, конденсаторов связи и прочей работой технологического оборудования. Естественная несимметрия, величина которой, по своей природе, нестабильна во времени, обуславливает постоянное наличие некомпенсируемой погрешности при настройке ДГР, приводящей к ложному действию, что не только снижает точность резонансной настройки ДГР, но делает ее неопределенной во времени. Известное устройство не позволяет принимать во внимание наличие в сети естественной несимметрии и поддерживать суммарную величину несимметрии на уровне, обеспечивающем корректную работу фазового метода регулирования ДГР. Это снижает эффективность использования предварительной настройки ДГР в нормальном режиме в резонанс с емкостью сети. В результате, снижается точность настройки в резонанс, повышаются величины токов замыкания на землю и уровни перенапряжений, воздействующих на изоляцию всей гальванически связанной сети при ОЗЗ, что снижает надежность работы электрической сети.
Кроме того, в известном устройстве используют в качестве входных данных для контроля и измерения расстройки напряжение 3U0, снимаемое с измерительного трансформатора напряжения, что дает большую погрешность в измерениях. Это объясняется тем, что сигнал 3U0 с разомкнутого треугольника, формируемый как сумма трех больших векторов напряжений, при низких значениях напряжения в нормальном режиме (возможно, доли вольта при расстройке) может иметь очень большую погрешность как по амплитуде, так и по фазе. В результате, снижается точность настройки в резонанс, а следовательно, снижается надежность работы электрической сети. Причем, этот же недостаток не позволяет даже грубо определить положение плунжера, так как для этого требуется достаточно точно знать величины напряжения и тока именно на обмотке ДГР. При этом устройство предусматривает работу только с конкретным типом ДГР, имеющим строго заданные рабочие параметры. В результате сужаются его функциональные возможности.
Таким образом, выявленное в результате патентного поиска наиболее близкое к предлагаемому устройство для автоматической настройки плунжерного дугогасящего реактора при осуществлении не обеспечивает достижение технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей и в повышении надежности работы электрической сети.
Предлагаемое изобретение - способ автоматической настройки плунжерного дугогасящего реактора, решает задачу создания соответствующего способа, осуществление которого позволяет достичь технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей и в повышении надежности работы электрической сети.
Сущность заявленного способа автоматической настройки плунжерного дугогасящего реактора заключается в том, что в заявленном способе при отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети, которое включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного опорного напряжения, для чего в качестве опорной выбирают фазу линейного напряжения, и изменение индуктивности ДГР в соответствии с величиной и знаком расстройки до получения резонанса, при этом при превышении напряжением на нейтрали значения, соответствующего максимально допустимому, или при возникновении ОЗЗ индуктивность ДГР поддерживают неизменной до восстановления нормального режима работы сети, новым является то, что напряжение на нейтрали 3U0 измеряют посредством дополнительной вторичной обмотки ДГР, кроме того, предварительно после создания искусственного смещения нейтрали снимают регулировочную характеристику ДГР, представляющую собой зависимость амплитуды и фазы напряжения на нейтрали 3U0 от положения плунжера, запоминают максимальное значение амплитуды напряжения на нейтрали 3U0max и соответствующую ему фазу, после этого возвращают плунжер в положение, соответствующее 3U0max, затем выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом, если во время настройки ДГР по фазовому методу значение напряжения 3U0 опускается ниже минимально допустимого уровня, то осуществляют переход на амплитудный метод настройки, для чего снимают регулировочную характеристику ДГР и фиксируют амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу в данный момент времени, после чего переходят к автоматической настройке в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом.
Технический результат достигается следующим образом. Существенные признаки формулы изобретения: «Способ автоматической настройки плунжерного дугогасящего реактора, в соответствии с котоым при отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети, которое включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного опорного напряжения, для чего в качестве опорной выбирают фазу линейного напряжения, и изменение индуктивности ДГР в соответствии с величиной и знаком расстройки до получения резонанса, при этом при превышении напряжением на нейтрали значения, соответствующего максимально допустимому, или при возникновении ОЗЗ индуктивность ДГР поддерживают неизменной до восстановления нормального режима работы сети,…» являются признаками, обеспечивающими работоспособность заявленного способа, а следовательно, эти существенные признаки обеспечивают достижение заявленного технического результата.
Благодаря тому что в заявленном способе напряжение на нейтрали 3U0 измеряют посредством дополнительной вторичной обмотки ДГР, повышается точность настройки в резонанс, в отличие от случая, когда в качестве входных данных для контроля и измерения расстройки используют напряжение 3U0, снимаемое с измерительного трансформатора напряжения (в прототипе). Последнее дает большую погрешность в измерениях. Это объясняется тем, что сигнал 3U0 с разомкнутого треугольника, формируемый как сумма трех больших векторов напряжений, при низких значениях напряжения в нормальном режиме (возможно, доли вольта при расстройке) может иметь очень большую погрешность как по амплитуде, так и по фазе. В заявленном устройстве повышение точности настройки индуктивности ДГР в резонанс с емкостью сети снижает величины токов замыкания на землю и уровни перенапряжений, воздействующих на изодяцию всей гальванически связанной сети при ОЗЗ, что повышает надежность работы электрической сети.
Кроме того, измерение напряжения на нейтрали 3U0 посредством дополнительной вторичной обмотки ДГР, т.е. непосредственно на ДГР, позволяет точно определить положение плунжера, так как для этого требуется достаточно точно знать величину напряжения 3U0 именно на обмотке ДГР. Это также повышает точность настройки в резонанс, а также расширяет функциональные возможности заявленного способа, по сравнению с прототипом.
Благодаря тому что в заявленном способе предварительно, после создания искусственного смещения нейтрали, снимают регулировочную характеристику ДГР, представляющую собой зависимость амплитуды и фазы напряжения на нейтрали 3U0 от положения плунжера, и фиксируют изменения этих параметров от положения плунжера, обеспечивается возможность автоматической точной настройки в резонанс с сетью ДГР, имеющих отличные друг от друга параметры, что расширяет функциональные возможности заявленного способа. Кроме того, поскольку при снятии регулировочной характеристики постоянно контролируют текущее положение плунжера, то снятие регулировочной характеристики ДГР позволяет начать автоматическую настройку не методом последовательных приближений, а непосредственно с поддержания заданного режима, характерного именно для текущего положения плунжера данного ДГР. В результате, повышается точность настройки в резонанс, а следовательно, повышается надежность работы электрических сетей. Кроме того, это позволяет также работать с ДГР с отличающимися друг от друга параметрами, что расширяет функциональные возможности способа.
Выбор в качестве опорной фазы линейного напряжения, объясняется тем, что линейные напряжения не связаны с процессами, касающимися соединения с землей, что обуславливает отсутствие в них токов нулевой последовательности. Это обуславливает стабильность линейного напряжения, а следовательно, и стабильность его параметров. В результате выбор в качестве опорной фазы линейного напряжения обеспечивает точность фазовой автоподстройки (ФАП), а следовательно, обеспечивает достижение заявленного технического результата.
Как уже описано выше, смещение нейтрали складывается из суммы двух составляющих: Еиск+Еест, где Еиск - искусственно созданное смещение нейтрали, а Еест - это смещение нейтрали, которое в нормальном режиме работы сети присутствует всегда. Естественная несимметрия обусловлена различным расположением проводов на опорах, неравномерным распределением по фазам конденсаторов для защиты вращающихся машин, конденсаторов связи и прочей работой технологического оборудования. Естественная несимметрия, величина которой, по своей природе, нестабильна во времени, обуславливает постоянное наличие некомпенсируемой погрешности при настройке ДГР, приводящей к ложному действию, что не только снижает точность резонансной настройки ДГР, но делает ее неопределенной во времени. В заявленном способе благодаря возможности снятия регулировочной характеристики ДГР, а также возможности фиксации фазы и амплитуды напряжения на нейтрали 3U0max, соответствующих резонансу, обеспечивается возможность ФАП при одновременном контроле амплитуды 3U0, и переход на амлитудный метод настройки в резонанс при понижении значения напряжения 3U0 до уровня ниже минимально допустимого. Это позволяет учесть нестабильность погрешности, вносимой в настройку естественным смещением нейтрали. Для этого, в заявленном способе, во время настройки ДГР по фазовому методу при обнаружении понижения значения напряжения 3U0 до уровня ниже минимально допустимого осуществляют переход на амплитудный метод настройки и фиксируют новые амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу, с учетом погрешности, вносимой естественным смещением нейтрали. После чего вновь переходят в режим ФАП. В результате гарантируется корректная работа фазового метода регулирования, повышается надежность заявленного способа, а следовательно, обеспечивается достижение заявленного технического результата.
При превышении напряжением на нейтрали значения, соответствующего максимально допустимому превышению, или при возникновении ОЗЗ автоматическую подстройку реактора в резонанс прекращают до восстановления нормального режима работы сети, поддерживая индуктивность ДГР, т.е. сохраняя резонансную настройку ДГР, что повышает надежность работы электрической сети.
Из вышеизложенного следует, что заявленный способ обеспечивает возможность поддержания величины смещения нейтрали на уровне, обеспечивающем устойчивую работу ФАП с учетом нестабильности величины искусственного смещения нейтрали, благодаря возможности перехода на амплитудный метод настройки во время настройки ДГР по фазовому методу в случае обнаружения недопустимого понижения значения амплитуды напряжения 3U0 путем фиксации новых амплитуды и фазы напряжения смещения нейтрали 3U0, соответствующих резонансу, с учетом погрешности, вносимой естественным смещением нейтрали. В результате гарантируется корректная работа фазового метода регулирования, повышается точность настройки в резонанс, а следовательно, повышается надежность работы электрической сети. При этом заявленный способ в нормальном режиме работы сети обеспечивает выполнение автоматической настройки на резонансный режим плунжерных ДГР с отличными друг от друга техническими характеристиками при допустимой величине смещения нейтрали, что повышает точность настройки в резонанс, расширяет функциональные возможности способа и повышает надежность работы электической сети.
Таким образом, заявленный способ автоматической настройки плунжерного дугогасящего реактора при осуществлении обеспечивает достижение технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей, а также в повышении надежности работы электрической сети.
Предлагаемое устройство для автоматической настройки плунжерного дугогасящего реактора, осуществляющее заявленный способ, решает задачу создания устройства, осуществление которого позволяет достичь технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей, а также в повышении надежности работы электрической сети.
Сущность заявленного изобретения заключается в том, что в устройстве для автоматической настройки плунжерного дугогасящего реактора, содержащем плунжерный дугогасящий реактор (ДГР), содержащий основную обмотку, первый вывод которой подключен к нейтрали сети, блок управления, подключенный к выходу блока управления управляемый коммутатор, выход которого является выходом управления плунжером ДГР, измерительный трансформатор напряжения (ИТН), подключенный первым, вторым и третьим входами параллельно к фазам распределительной линии А, Б и С соответственно, новым является то, что дополнительно введены адресно-информационная шина, несимметричный присоединительный трансформатор (НПТ) со встроенным источником смещения нейтрали, блок аналого-цифрового преобразования (БАЦП), измерительный трансформатор тока основной обмотки ДГР (ИТТ), а в качестве блока управления используют цифровой процессор, кроме того, ДГР содержит две дополнительные вторичные обмотки: управляющую обмотку и сигнальную для измерения напряжения смещения нейтрали, при этом первый вывод основной обмотки подключен к нейтрали сети через несимметричный присоединительный трансформатор, а второй вывод заземлен через последовательно соединенный измерительный трансформатор тока основной обмотки, при этом выводы сигнальной обмотки и выводы измерительного трансформатора тока основной обмотки ДГР подключены соответственно к первому и второму входам БАЦП, группа входов которого подключена к выходам измерительного трансформатора напряжения, а группа выходов подключена к соответствующим информационным входам блока управления, адресно-информационные входы-выходы которого и входы-выходы управляемого коммутатора подключены к адресно-информационной шине, при этом управляемый коммутатор содержит коммутирующие группы с первой по четвертую, кроме того, в устройство введены первый и второй резисторы, первые выводы которых соединены между собой и подключены к одному из выводов управляющей обмотки, к свободному выводу которой подключены неподвижные контакты первой и второй коммутирующих групп управляемого коммутатора, а замыкающие контакты подключены соответственно к вторым выводам первого и второго резисторов, кроме того, параллельно первой и второй коммутирующим группам управляемого коммутатора подключены дополнительно введенные первая и вторая последовательные RC-цепи соответственно, при этом третья и четвертая коммутирующие группы управляемого коммутатора являются выходом управления плунжером ДГР. При этом управляемый коммутатор содержит микропроцессор и семисторные ключи с опторазвязкой с первого по четвертый, входы которых подключены к управляющим выходам микропроцессора, а входы-выходы микропроцессора являются входами-выходами управляемого коммутатора, при этом коммутирующие контакты ключей с первого по четвертый являются соответственно первой, второй, третьей и четвертой коммутирующими группами управляемого коммутатора. Кроме того, блок аналого-цифрового преобразования содержит модуль ввода фазных напряжений, входы которого являются группой входов БАЦП, и модуль ввода напряжения смещения нейтрали и тока основной обмотки ДГР, при этом модуль ввода фазных напряжений содержит по числу фаз соединенные последовательно преобразователи напряжение-напряжение, аналого-цифровые преобразователи (АЦП) и узлы гальванической развязки, кроме того, модуль ввода напряжения смещения нейтрали и тока главной обмотки ДГР содержит АЦП, преобразователь напряжение-напряжение, преобразователь ток-напряжение и узел гальванической развязки, при этом выходы преобразователя напряжение-напряжение и преобразователя ток-напряжение подключены к соответствующим входам АЦП, выход которого подключен к входу узла гальванической развязки, при этом, входы преобразователя напряжение-напряжение и преобразователя ток-напряжение являются соответственно первым и вторым входами БАЦП, а выходы узлов гальванической развязки являются группой выходов БАЦП.
Технический результат достигается следующим образом. Заявленное устройство обеспечивает автоматическую настройку ДГР с отличающимися друг от друга техническими характеристиками в резонанс с сетью (резонансную настройку) по условию равенства индуктивного сопротивления ДГР и емкостного сопротивления сети. Настройка выполняется воздействием на механизм изменения индуктивности, а именно на привод ДГР. Кроме того, при ОЗЗ устройство обеспечивает кратковременное увеличение активного тока ОЗЗ в месте повреждения путем кратковременного подключения резистора параллельно управляющей обмотке ДГР. В результате обеспечивается достижение технического результата, заключающегося в повышении точности настройки ДГР в резонанс с емкостью сети, расширение функциональных возможностей и повышение надежности работы электрической сети.
Обработка сигналов и выработка сигналов управления осуществляется 32-разрядным микропроцессором архитектуры ARM7. В блок центрального процессора также входят часы реального времени с автономным питанием, память типа EEPROM для хранения настроечных данных, память типа DataFlash объемом 4 Мбайт (флеш-диск) для хранения служебных файлов и протоколов работы за длительный интервал времени. Использование в качестве блока управления процессора позволяет занести в его память настроечные данные для плунжерных ДГР, обладающих отличными друг от друга техническими характеристиками, что расширяет функциональные возможности заявленного устройства, а также повышает точность настройки ДГР в резонанс с сетью.
В задачу процессора входят: автоматическая настройка ДГР в резонанс с емкостью сети в отсутствие ОЗЗ, а именно измерение фазового угла напряжения на нейтрали 3U0, получаемых при помощи источника искусственного смещения нейтрали (ИСН), в контуре нулевой последовательности (КНПС), представляющего собой резонансный контур из индуктивности ДГР и емкости сети (контролируется угол между опорным напряжением и напряжением смещения нейтрали 3U0), сравнение результата с заложенной в него информацией и поддержание этого угла в допустимых пределах путем формирования управляющих сигналов на входе управляемого коммутатора для изменения индуктивности ДГР в соответствии с величиной и знаком расстройки;
настройка ДГР в резонанс с емкостью сети по максимуму огибающей напряжения смещения нейтрали;
определение величины и знака расстройки контура;
блокировка работы устройства при сверхнормативном смещении нейтрали;
в режиме ОЗЗ - формирование управляющих сигналов для управляемого коммутатора по текущей величине тока в основной обмотке ДГР, фиксируемой измерительным трансформатором тока (ИТТ), и напряжения смещения нейтрали на измерительной обмотке ДГР для кратковременного подключения резисторов параллельно управляющей обмотке ДГР;
автоматическое определение механических параметров плунжерного ДГР для повышения точности регулирования.
Введение адресно-информационной шины, к которой подключены адресно-информационные входы-выходы процессора и входы-выходы управляемого коммутатора, обеспечивает возможность обмена информацией между процессором и управляемым коммутатором, что обеспечивает работоспособность заявленного устройства, а следовательно, и достижение заявленного технического результата.
В заявленном устройстве ДГР способствует гашению электрической дуги при наличии ОЗЗ в сети. Благодаря тому что в устройство введен несимметричный присоединительный трансформатор со встроенным источником смещения нейтрали, при этом первый вывод основной обмотки ДГР подключен к нейтрали сети через несимметричный присоединительный трансформатор, обеспечивается возможность создания смещения нейтрали. При этом использование несимметричного присоединительного трансформатора со встроенным источником смещения нейтрали исключает зависимость величины полученного таким образом напряжения искусственной несимметрии 3U0иск от величины емкостного тока сети, что повышает точность настройки ДГР в резонанс.
В результате, заявленное устройство позволяет в автоматическом режиме настроить ДГР в резонанс с емкостью сети и поддерживать это состояние в автоматическом режиме, используя фазовую автоподстройку (ФАП) угла вынужденных колебаний в контуре нулевой последовательности (КНПС): угол между фазами опорного напряжения и напряжения смещения нейтрали 3U0. При этом введение ИТН и наличие у ДГР сигнальной обмотки для измерения напряжения смещения нейтрали обеспечивают возможность использования фазы линейного напряжения в качестве опорного сигнала и выполнение ФАП между фазами опорного напряжения и напряжения смещения нейтрали 3U0, снимаемого с измерительной обмотки ДГР, что обеспечивает работоспособность заявленного устройства и повышает точность настройки в резонанс.
Возможность использования фазы линейного напряжения в качестве опорной обеспечивает точность ФАП, а следовательно, обеспечивает достижение заявленного технического результата. Это объясняется тем, что линейные напряжения не связаны с процессами, касающимися соединения с землей, что обуславливает отсутствие в них токов нулевой последовательности, что обуславливает стабильность линейного напряжения, а следовательно, и стабильность его параметров.
При этом благодаря тому что в заявленном устройстве плунжерный ДГР содержит дополнительную вторичную обмотку, а именно сигнальную обмотку для измерения напряжения смещения нейтрали, напряжение на нейтрали 3U0 в отличие от ближайшего аналога измеряют непосредственно на ДГР, что повышает точность настроки ДГР в резонанс с сетью. Это объясняется следующим. Использование для этой цели сигнала с измерительного трансформатора вносит большую погрешность в результаты измерений, так как сигнал 3U0 с разомкнутого треугольника, формируемый как сумма трех больших векторов напряжений, при низких значениях напряжения в нормальном режиме (возможно, доли вольта при расстройке) может иметь очень большую погрешность как по амплитуде, так и по фазе. В результате снижается точность настройки в резонанс, а следовательно, снижается надежность работы электрической сети. Кроме того, наличие сигнальной обмотки позволяет точно определить положение плунжера, так как для этого требуется достаточно точно знать величины напряжения и тока именно на обмотке ДГР, что повышает как точность настройки в резонанс, так и расширяет функциональные возможности заявленного устройства.
БАЦП выполняет преобразование аналогововых сигналов, поступающих на его вход, в цифровые и передачу цифровой информации в процессор через группу выходов, подключенную к группе информационных входов процессора, а именно: выводы сигнальной обмотки и выводы измерительного трансформатора тока основной обмотки ДГР подключены соответственно к первому и второму входам БАЦП, измерительный трансформатор напряжения подключен выходами к группе входов БАЦП.
Модуль ввода фазных напряжений, входы которого являются группой входов БАЦП, содержит преобразователи напряжение-напряжение с первого по третий, аналого-цифровые преобразователи (АЦП) с первого по третий и узлы гальванической развязки с первого по третий. При этом в блоке аналого-цифрового преобразования модуль ввода фазных напряжений обеспечивает возможность получения опорного сигнала, в качестве которого используют линейное напряжение, например UAC, а следовательно, обеспечивает возможность настройки ДГР в резонанс фазовым методом.
Модуль ввода напряжения смещения нейтрали и тока основной обмотки ДГР содержит четвертый АЦП, четвертый преобразователь напряжение-напряжение, преобразователь ток-напряжение и четвертый узел гальванической развязки, при этом, входы четвертого преобразователя напряжение-напряжение и преобразователя ток-напряжение являются соответственно первым и вторым входами БАЦП, при этом выходы узлов гальванической развязки группой выходов БАЦП.
Модуль ввода напряжения смещения нейтрали и тока основной обмотки ДГР обеспечивает возможность измерения процессором напряжения 3U0, поступающего с сигнальной обмотки ДГР, и тока основной обмотки ДГР Iдгр.
Во всех модулях преобразователи напряжение-напряжение, а также преобразователь ток-напряжение в модуле ввода напряжения смещения нейтрали и тока главной обмотки ДГР, входы которых являются входами модулей и входами БАЦП, формируют на своем выходе напряжение с амплитудой, обеспечивающей нормальный режим работы подключенных к ним АЦП и преобразующих входные сигналы БАЦП в цифровые сигналы. При этом, поскольку группа выходов БАЦП подключена к группе информационных входов процессора, то это обеспечивает возможность непрерывного измерения процессором напряжения и фазы 3U0 и фазы опорного напряжения, а следовательно, выполнения процессором автоматической настройки ДГР в резонанс, что обеспечивает достижение заявленного технического результата.
Наличие узлов гальванической развязки исключает взаимное влияние модулей друг на друга в процессе работы, что повышает точнось настройки ДГР в резонанс с емкостью сети.
Управляемый коммутатор по управляющим сигналам процессора обеспечивает формирование сигналов на перемещение плунжера ДГР при настройке в резонанс с сетью, а, при ОЗЗ - кратковременное подключение резистора параллельно управляющей обмотке ДГР. При этом микропроцессор, входы-выходы которого являются входами-выходами управляемого коммутатора, обеспечивает обмен информацией с процессором и передачу управляющих сигналов на семисторные ключи. Коммутирующие контакты ключей первого и второго являются соответственно первой и второй коммутирующими группами управляемого коммутатора и управляют кратковременным подключением к управляющей обмотке резисторов, а коммутирующие контакты ключей третьего и четвертого являются выходом управления плунжером ДГР, соответственно третьей и четвертой коммутирующими группами управляемого коммутатора и управляют пускателем двигателя ДГР вверх, вниз. Опторазвязка исключает влияние на работу семисторных ключей как внешних цепей, так и их взаимное влияние друг на друга, что повышает надежность работы устройства, а следовательно, и обеспечивает достижение заявленного технического результата.
Как уже описано выше, смещение нейтрали складывается из суммы двух составляющих: Еиск+Еест, где Еиск - искусственно созданное смещение нейтрали, а Еест - это смещение нейтрали, которое в нормальном режиме работы сети присутствует всегда. Естественная несимметрия обусловлена различным расположением проводов на опорах, неравномерным распределением по фазам конденсаторов для защиты вращающихся машин, конденсаторов связи и прочей работой технологического оборудования. Естественная несимметрия, величина которой, по своей природе, нестабильна во времени, обуславливает постоянное наличие некомпенсируемой погрешности при настройке ДГР, приводящей к ложному действию, что не только снижает точность резонансной настройки ДГР, но делает ее неопределенной во времени.
Заявленное устройство позволяет при автоматической настройке ДГР в резонанс учесть нестабильность погрешности, вносимой естественной несимметрией, причем, учитывая индивидуальные технические характеристики конкретного ДГР. Это обеспечивается наличием в заявленном устройстве возможности непрерывного измерения процессором напряжения и фазы 3U0 и возможности изменения индуктивности ДГР путем формирования сигналов на перемещение плунжера ДГР для управляемого коммутатора. Это позволяет снять регулировочную характеристику ДГР, представляющую собой зависимость амплитуды и фазы напряжения на нейтрали 3U0 от положения плунжера, и внести в память процессора значение амплитуды напряжения на нейтрали 3U0 и его фазу, соответствующие резонансу. При этом обеспечивается возможность автоматической точной настройки в резонанс с сетью ДГР, имеющих отличные друг от друга параметры, что повышает точность настройки ДГР в резонанс, а также расширяет функциональные возможности заявленного устройства. Кроме того, поскольку снятие регулировочной характеристики предполагает постоянный контроль текущего положения плунжера, то снятие регулировочной характеристики ДГР позволяет начать автоматическую настройку не методом последовательных приближений, а непосредственно с поддержания заданного режима, характерного именно для текущего положения плунжера данного конкретного ДГР. В результате, повышается точность настройки в резонанс, а следовательно, повышается надежность работы электрических сетей. Кроме того, это позволяет также работать с ДГР с отличающимися друг от друга параметрами, что расширяет функциональные возможности способа.
При этом, поскольку 3U0 измеряют посредством сигнальной обмотки ДГР, то информация, поступающая в процессор, содержит в себе суммарную информацию, а именно включает в себя и информацию о величине естественного смещения нейтрали. В результате, в заявленном устройстве при настройке в резонанс фазовым методом учитывается наличие естественного смещения нейтрали. Кроме того, возможность неоднократного снятия регулировочной характеристики ДГР позволяет при настройке в резонанс фазовым методом одновременно контролировать амплитуду 3U0 и перейти на амплитудную настройку в резонанс при недопустимом снижении амплитуды 3U0. Это позволяет учесть нестабильность погрешности, вносимой в настройку естественным смещением нейтрали. Заявленное устройство позволяет во время настройки ДГР по фазовому методу при обнаружении понижения значения напряжения 3U0 до уровня ниже минимально допустимого перейти на амплитудный метод настройки и фиксировать новые амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу, с учетом погрешности, вносимой естественным смещением нейтрали. После чего устройство вновь переходит в режим ФАП. В результате гарантируется корректная работа фазового метода регулирования, повышается точность настройки в резонанс и надежность работы электрической сети.
Благодаря возможности контроля напряжения 3U0, а также благодаря тому, что 3U0 измеряют посредством сигнальной обмотки ДГР, что повышает достоверность информации, при превышении напряжением на нейтрали значения выше допустимого или при возникновении ОЗЗ процессор прекращает автоматическую подстройку реактора в резонанс с емкостью сети до восстановления нормального режима работы сети, поддерживая достигнутое значение индуктивности ДГР, т.е. сохраняя резонансную настройку ДГР, что повышает надежность работы электрической сети при ОЗЗ.
Из вышеизложенного следует, что заявленное устройство обеспечивает возможность поддержания величины смещения нейтрали на уровне, обеспечивающем устойчивую работу ФАП с учетом нестабильности величины искусственного смещения нейтрали, благодаря возможности перехода на амплитудный метод настройки во время настройки ДГР по фазовому методу в случае обнаружения недопустимого понижения значения амплитуды напряжения 3U0 путем фиксации новых амплитуды и фазы напряжения смещения нейтрали 3U0, соответствующих резонансу, с учетом погрешности, вносимой естественным смещением нейтрали. В результате гарантируется корректная работа фазового метода регулирования, повышается точность настройки в резонанс, а следовательно, повышается надежность работы электрической сети. При этом заявленное устройство в нормальном режиме работы сети обеспечивает выполнение автоматической настройки на резонансный режим плунжерных ДГР с отличными друг от друга техническими характеристиками при допустимой величине смещения нейтрали, что повышает точность настройки в резонанс, расширяет функциональные возможности способа и повышает надежность работы электической сети.
При возникновении ОЗЗ кратковременно, на время, достаточное для срабатывания сетевых защит от ОЗЗ, управляемый коммутатор подключает резистор параллельно управляющей вторичной обмотке ДГР. В результате, через место повреждения начинает протекать дополнительный активный ток, увеличивающий значение активного тока в месте повреждения при ОЗЗ и способствующий надежному срабатыванию сетевой защиты при металлическом замыкании или при дуговом перемежающемся пробое, способствующий переходу дугового перемежающегося пробоя в установившееся замыкание и формирующий необходимые условия для повышения надежного срабатывания сетевых защит. В результате повышается надежность работы электрической сети.
Процессор при возникновении ОЗЗ формирует для управляемого коммутатора сигнал для кратковременного подключения резистора параллельно управляющей обмотке ДГР. При этом, поскольку при ОЗЗ напряжение смещения нейтрали носит нестабильный характер, то процессор рассчитывает среднедействующее значение напряжения смещения нейтрали, анализирует его величину и, в соответствии с полученным результатом, формирует управляющие сигналы на входах-выходах управляемого коммутатора.
Выбор напряжения смещения нейтрали в качестве контролируемого позволяет по величине его среднедействующего значения оценить величину активного тока в месте повреждения при ОЗЗ и принять решение о величине подключаемого управляемого резистора исходя из требований максимально допустимого тока ОЗЗ в сети данного класса напряжения. При этом, поскольку неподвижные контакты первой и второй коммутирующих групп управляемого коммутатора подключены к свободному выводу управляющей обмотки, а замыкающие контакты первой и второй коммутирующих групп подключены соответственно к вторым выводам первого и второго резисторов, то в зависимости от величины среднедействующего значения напряжения смещения нейтрали выполняются три варианта подключения резисторов: первого или второго, или параллельное соединение первого и второго резисторов.
Опытным путем авторами получены диапазоны значений напряжения смещения нейтрали, характерных для ОЗЗ, и соответствующие им величины сопротивлений резисторов, подключаемых параллельно управляющей обмотке ДГР при ОЗЗ, которые в совокупности формируют необходимые условия для надежного и оперативного срабатывания простых токовых защит и защит терминалов присоединения и повышают их селективность, повышая тем самым надежность работы электрической сети. При этом значение суммарного активного тока при ОЗЗ в месте повреждения, необходимое для срабатывании защиты, гарантированно не превышает максимально допустимое, что повышает надежность срабатывания защит, а следовательно, повышает надежность работы электрической сети.
Были получены следующие диапазоны среднедействующих значений напряжения смещения нейтрали, характерные для ОЗЗ: величина среднедействующего значения напряжения смещения нейтрали превышает 50% от ее номинального значения; величина среднедействующего значения напряжения смещения нейтрали находится в пределах от 33 до 50% от ее номинального значения;
величина среднедействующего значения напряжения смещения нейтрали ниже 33%, но больше или равна 30% от номинального значения.
При этом величине среднедействующего значения напряжения смещения нейтрали, превышающей 50% от ее номинального значения, соответствует величина сопротивления первого резистора, удовлетворяющая условию получения величины суммарного активного тока в месте ОЗЗ, равной максимально допустимой величине активного тока для данной сети при металлическом замыкании на землю с малым сопротивлением в месте ОЗЗ. Диапазону значений величины среднедействующего значения напряжения смещения нейтрали от 33 до 50% от ее номинального значения соответствует величина сопротивления второго резистора, которая составляет половину от величины сопротивления первого резистора. Диапазону значений величины среднедействующего значения напряжения смещения нейтрали ниже 33%, но больше или равно 30% от номинального значения соответствует резистор, величина сопротивления которого составляет одну треть от величины сопротивления первого резистора.
Таким образом, максимальное значение первого резистора, подключаемого параллельно управляющей обмотке ДГР, а следовательно, и второго резистора, в заявленном устройстве является вполне определенной величиной, вытекающей из условия создания суммарного активного максимально допустимого для данной сети величины тока ОЗЗ при металлическом замыкании на землю с малым сопротивлением в месте ОЗЗ.
При подключении соответствующего резистора через место повреждения при ОЗЗ протекает дополнительный активный ток, увеличивающий значение активного тока в месте повреждения при ОЗЗ до величины, близкой к максимально допустимой при ОЗЗ. При этом значение тока при ОЗЗ в месте повреждения, необходимое для срабатывании защиты, гарантированно не превышает максимально допустимое, что, с одной стороны, повышает надежность их срабатывания, а с другой стороны, сохраняются требования безопасности при эксплуатации электрических сетей. В результате, заявленное устройство формирует необходимые условия для надежного и оперативного срабатывания простых токовых защит и защит терминалов присоединения, что повышает надежность работы электрической сети.
Таким образом, заявленное устройство позволяет, используя только два резистора для параллельного подключения к управляющей обмотке, а именно: их поочередное подключение или параллельное соединение, формировать необходимые условия для надежного и оперативного срабатывания простых токовых защит и защит терминалов присоединения в диапазоне среднедействующих значений напряжения смещения нейтрали, характерных для ОЗЗ. В результате исключается необходимость пошагового подбора резисторов для оптимизации величины добавочного активного тока для надежного срабатывания сетевых защит, что повышает оперативность срабатывания сетевых защит, а следовательно, повышает надежность работы электрической сети. При этом благодаря возможности снятия регулировочной характеристики ДГР и внесению в память процессора данных о максимальном значении 3U0 и соответствующей фазе, а также динамических характеристик регулируемого ДГР обеспечивается возможность работы заявленного устройства в режиме ОЗЗ с ДГР с отличающимися друг от друга техническими характеристиками, что расширяет функциональные возможности заявленного устройства.
Кроме того, благодаря тому, что управляемый коммутатор содержит первый и второй семисторные ключи с опторазвязкой, входы которых являются соответственно первым и вторым управляемыми входами коммутатора, при этом коммутирующие контакты первого и второго ключей являются соответственно первой и второй коммутирующими группами управляемого коммутатора, в заявленном устройстве для подключения резисторов используют только две коммутирующие группы, т.е. используется минимальное количество переключающих элементов. Это повышает надежность заявленного устройства, а следовательно, повышает надежность работы электрической сети.
Как было показано выше, при каждом отключении резистора в момент отключения в управляющей вторичной обмотке ДГР возникает перенапряжение, которое может привести к ее повреждению. Это обусловлено тем, что в этот момент между размыкаемыми контактами коммутатора кратковременно возникает электрическая дуга, при гашении которой возникает обрыв тока, что приводит к броску напряжения в управляющей вторичной обмотке ДГР. Значительное сокращение количества переключающих элементов снижает вероятность выхода из строя управляющей обмотки, по сравнению с прототипом, что повышает надежность заявленного устройства. Однако наличие переключающих элементов, а также то, что отключения резистора имеют повторяющийся характер, ухудшает условия работы управляющей обмотки ДГР, что может привести к выходу ее из строя. Для облегчения режима работы управляющей обмотки ДГР в заявленное устройство дополнительно введены первая и вторая последовательные RC-цепи, которые подключены параллельно каждой коммутирующей группе управляемого коммутатора. В результате, в момент отключения резистора элементы RC-цепи шунтируют размыкающиеся контакты и ограничивают величину перенапряжения в управляющей обмотке ДГР до допустимой величины, повышая тем самым надежность работы устройства, а следовательно, и надежность работы электрической сети.
Широко известно использование RC-цепи для шунтирования размыкающихся контактов коммутирующих групп с целью предотвращения их подгорания. Однако в заявленном устройстве подключение RC-цепи параллельно к размыкающимся контактам коммутирующих групп управляемого коммутатора решает задачу снижения перенапряжения в управляющей обмотке ДГР, что обуславливает выбор параметров RC-цепи из условия ограничения величины перенапряжения в управляющей обмотке ДГР при размыкании контакта. Эти требования к параметрам RC-цепи более жесткие, по сравнению с требованиями для предотвращения подгорания контактов. В результате, в заявленном устройстве подключение RC-цепи параллельно к контактам коммутирующих групп управляемого коммутатора в момент их размыкания решает одновременно и задачу предотвращения подгорания контактов коммутирующих групп. Это также повышает надежность заявленного устройства, а следовательно, обеспечивает достижение заявленного технического результата.
При этом, как показал опыт, в штатном режиме RC-цепи не влияют на работу ДГР, так как дополнительный ток в основной обмотке ДГР при ОЗЗ составляет примерно 1А.
Таким образом, введение в заявленное устройство первой и второй последовательных RC-цепей, которые подключены параллельно каждой коммутирующей группе управляемого коммутатора, повышает надежность работы заявленного устройства, а следовательно, обеспечивает достижение заявленного технического результата.
Из вышеизложенного следует, что заявленное устройство для автоматической настройки плунжерного дугогасящего реактора, осуществляющее заявленный способ автоматической настройки плунжерного дугогасящего реактора, при осуществлении обеспечивает достижение технического результата, заключающегося в повышении точности настройки в резонанс, в расширении функциональных возможностей, а также в повышении надежности работы электрической сети.
На чертеже изображено устройство для автоматической настройки плунжерного дугогасящего реактора, осуществляющее заявленный способ автоматической настройки плунжерного дугогасящего реактора.
Заявленное устройство для автоматической настройки плунжерного дугогасящего реактора содержит плунжерный ДГР 1, блок управления 2, в качестве которого используют цифровой процессор, БАЦП 3, несимметричный присоединительный трансформатор 4 со встроенным источником смещения нейтрали, измерительный трансформатор напряжения 5, измерительный трансформатор тока основной обмотки ДГР 6, адресно-информационную шину 7, управляемый коммутатор 8. Плунжерный ДГР 1 содержит основную обмотку 9 и две дополнительные вторичные обмотки: управляющую обмотку 10 и сигнальную 11 для измерения напряжения смещения нейтрали. При этом первый вывод основной обмотки 9 подключен к нейтрали сети, а второй через измерительный трансформатор тока 6 соединен с землей. Измерительный трансформатор напряжения 5 подключен первым, вторым и третьим входами параллельно к фазам А, Б и С распределительной линии соответственно, а выходами к группе входов БАЦП 3. К выходу блока управления подключен управляемый коммутатор 8, который содержит коммутирующие группы с первой по четвертую. Выводы измерительной обмотки 11 напряжения смещения нейтрали и выводы измерительного трансформатора тока 6 главной обмотки ДГР подключены соответственно к первому 12 и второму 13 входам БАЦП, группа выходов которого подключена к соответствующим информационным входам блока управления 2, адресно-информационные входы-выходы которого и входы-выходы управляемого коммутатора подключены к адресно-информационной шине 7.
Кроме того, устройство содержит первый 14 и второй 15 резисторы, первые выводы которых соединены между собой и подключены к одному из выводов управляющей обмотки 10. При этом неподвижные контакты первой 16 и второй 17 коммутирующих групп управляемого коммутатора 8 подключены к свободному выводу управляющей обмотки 10, а замыкающие контакты первой 16 и второй 17 коммутирующих групп подключены соответственно к вторым выводам первого 14 и второго 15 резисторов. Кроме того, параллельно первой 16 и второй 17 коммутирующим группам управляемого коммутатора 8 подключены дополнительно введенные первая 18 и вторая 19 последовательные RC-цепи соответственно. Кроме того, третья 20 и четвертая 21 коммутирующие группы управляемого коммутатора 8 являются выходом управления плунжером ДГР 1.
Управляемый коммутатор 8 содержит микропроцессор 22 и семисторные ключи с опторазвязкой с первого 23 по четвертый 26, входы которых подключены к управляющим выходам микропроцессора 22, а входы-выходы микропроцессора 22 являются входами-выходами управляемого коммутатора 8. При этом коммутирующие контакты ключей с первого 23 по четвертый 26 являются соответственно первой 16, второй 17, третьей 20 и четвертой 21 коммутирующими группами управляемого коммутатора 8.
Блок аналого-цифрового преобразования 3 содержит модуль 27 ввода фазных напряжений, входы которого являются группой входов БАЦП 3, и модуль ввода 28 напряжения смещения нейтрали и тока главной обмотки ДГР 1. При этом модуль 27 ввода фазных напряжений содержит по числу фаз соединенные последовательно преобразователи напряжение-напряжение 29, аналого-цифровые преобразователи (АЦП) 30 и узлы гальванической развязки 31. При этом входы преобразователей напряжение-напряжение являются входами модуля ввода фазных напряжений.
Поскольку состав и схема соединения узлов модуля 28 идентичны, то на фигуре это отражено широкими стрелками.
Модуль 28 ввода напряжения смещения нейтрали и тока главной обмотки ДГР содержит преобразователь напряжение-напряжение 32, преобразователь ток-напряжение 33, АЦП 34 и узел гальванической развязки 35. Выходы преобразователя напряжение-напряжение 32 и преобразователя ток-напряжение 33 подключены к соответствующим входам АЦП 34, выход которого подключен к входу узла гальванической развязки 35. Входы преобразователя напряжение-напряжение 32 и преобразователя ток-напряжение 33 являются соответственно первым 12 и вторым 13 входами БАЦП 3, а выходы узлов гальванической развязки 35 являются группой выходов БАЦП 3.
Заявленный способ автоматической настройки плунжерного дугогасящего реактора реализуют следующим образом. При отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети, которое включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного опорного напряжения и изменение индуктивности ДГР в соответствии с величиной и знаком расстройки до получения резонанса. В качестве опорной выбирают фазу линейного напряжения. При превышении напряжением на нейтрали значения, соответствующего максимально допустимому, или при возникновении ОЗЗ индуктивность ДГР поддерживают неизменной до восстановления нормального режима работы сети. Напряжение на нейтрали 3U0 измеряют посредством дополнительной вторичной обмотки ДГР. Предварительно после создания искусственного смещения нейтрали снимают регулировочную характеристику ДГР, представляющую собой зависимость амплитуды и фазы напряжения на нейтрали 3U0 от положения плунжера, запоминают максимальное значение амплитуды напряжения на нейтрали 3U0max и соответствующую ему фазу, после этого возвращают плунжер в положение, соответствующее 3U0max. Затем выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом. Если во время настройки ДГР по фазовому методу значение напряжения 3U0 опускается ниже минимально допустимого уровня, то осуществляют переход на амплитудный метод настройки. Для этого вновь снимают регулировочную характеристику ДГР и фиксируют амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу индуктивности ДГР с емкостью сети в данный момент времени. После чего переходят к автоматической настройке в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом.
Заявленное устройство для автоматической настройки плунжерного дугогасящего реактора, осуществляющее заявленный способ, работает следующим образом.
Заявленное устройство при отсутствии ОЗЗ обеспечивает автоматическую настройку ДГР в резонанс с сетью (резонансную настройку) по условию равенства индуктивного сопротивления ДГР и емкостного сопротивления сети. Настройка выполняется воздействием на механизм изменения индуктивности, а именно на привод ДГР. Кроме того, при ОЗЗ устройство обеспечивает кратковременное увеличение активного тока ОЗЗ в месте повреждения путем кратковременного подключения резистора параллельно управляющей обмотке ДГР.
Обработка сигналов и выработка сигналов управления осуществляется 32-разрядным микропроцессором архитектуры ARM7. В блок центрального процессора также входят часы реального времени с автономным питанием, память типа EEPROM для хранения настроечных данных, память типа DataFlash объемом 4 Мбайт (флеш-диск) для хранения служебных файлов и протоколов работы за длительный интервал времени.
В задачу процессора входят: автоматическая настройка ДГР в резонанс с емкостью сети в отсутствие ОЗЗ, а именно измерение фазового угла напряжения на нейтрали 3U0, получаемых при помощи источника искусственного смещения нейтрали (ИСН), в контуре нулевой последовательности (КНПС), представляющего собой резонансный контур из индуктивности ДГР и емкости сети (контролируется угол между опорным напряжением и напряжением смещения нейтрали 3U0), сравнение результата с заложенной в него информацией и поддержание этого угла в допустимых пределах путем формирования управляющих сигналов на входе управляемого коммутатора для изменения индуктивности ДГР в соответствии с величиной и знаком расстройки;
настройка ДГР в резонанс с емкостью сети по максимуму огибающей напряжения смещения нейтрали;
определение величины и знака расстройки контура;
блокировка работы устройства при сверхнормативном смещении нейтрали;
в режиме ОЗЗ - формирование управляющих сигналов для управляемого коммутатора по текущей величине тока в основной обмотке ДГР, фиксируемой ИТТ, и напряжения смещения нейтрали на измерительной обмотке ДГР для кратковременного подключения резисторов параллельно управляющей обмотке ДГР;
автоматическое определение механических параметров плунжерного ДГР для повышения точности регулирования.
Модуль ввода фазных напряжений обеспечивает измерение линейных напряжений, что позволяет выбрать линейное напряжение в качестве опорного для ФАП при настройке ДГР в резонанс сетью.
Модуль ввода напряжения смещения нейтрали и тока основной обмотки ДГР обеспечивает измерение сигналов 3U0, поступающего с сигнальной обмотки ДГР, и сигнала тока Iдгр.
Информация об этих сигналах используется для вычисления положения плунжера, диагностики исправности, а также при снятии регулировочной характеристики.
Управляемый коммутатор обеспечивает формирование сигналов на перемещение привода и, при ОЗЗ, включение резистора параллельно управляющей обмотке ДГР
Предварительно, перед тем как приступить к настройке ДГР в резонанс с сетью, процессор по команде выполняет снятие регулировочной характеристики плужерного ДГР, используемого в сети в данный момент времени. Снятие характеристики производится путем перемещения плунжера из крайнего нижнего положения (минимальный ток) до крайнего верхнего с запоминанием значений 3U0. Данные измерений сохраняют в процессоре на карте памяти. По команде с процессора, которая поступает в микропроцессор 22 управляемого коммутатора 8, на контактах коммутирующей группы 20 формируется сигнал на перемещение плунжера ДГР 1 в крайнее нижнее положение. После чего процессор фиксирует значение 3U0 и соответствующую ему фазу. Измерение значений 3U0 выполняют посредством измерительной обмотки 11 ДГР 1. При этом напряжение 3U0 измерительной обмотки 11 ДГР 1 поступает на пребразователь напряжение-напряжение 32 в БАЦП 3, а затем - на АЦП 34 и преобразуется в цифровой код, который и поступает в процессор 2 через группу выходов БАЦП 3 и группу информационных входов процессора 2. После фиксации первого результата процессор 2 формирует управляющий сигнал для коммутатора 8 для перемещения плунжера вверх на заданный шаг. При этом на контактах коммутирующей группы 21 формируется сигнал на перемещение плунжера ДГР 1 вверх. Далее процесс повторяется до достижения плунжером крайнего верхнего положения.
В течение снятия регулировочной характеристики процессор 2 обменивается информацией с микропроцессором 22 управляемого коммутатора 8, контролируя выполнение команд. Определение положения плунжера процессор производит путем вычисления индуктивной проводимости по текущим измеряемым величинам тока основной обмотки и напряжения смещения нейтрали на сигнальной обмотке. Для определения положения плунжера требуется достаточно точно знать величины напряжения 3U0 и тока именно на обмотке ДГР. В заявленном устройстве в процессор 2 поступает информация из БАЦП о напряжении 3U0, которая снимается с дополнительной вторичной обмотки 11, а ток измеряется непосредственно в основной обмотке ДГР1. Это обеспечивает точность автоматической настройки ДГР1 в резонанс.
После снятия регулировочной характеристики плунжер процессор 2 возвращает в положение, соответствующее 3U0max. Далее, при отсутствии ОЗЗ, процессор 2 выполняет автоматическую настройку ДГР1 в резонанс с сетью посредством фазовой автоподстройки. В качестве опорной выбирают фазу линейного напряжения, например А-С. Информация о линейных напряжениях поступает в БАЦП с выхода измерительного трансформатора напряжения 5 и преобразуется в модуле 27 ввода фазных напряжения в цифровой код. В процессе ФАП процессор контролирует угол между опорным напряжением и напряжением смещения нейтрали 3U0, сравнивает результат с заложенной в него информацией и поддерживает этот угол в допустимых пределах, изменяя в соответствии с величиной и знаком расстройки положение плунжера ДГР 1, а следовательно, изменяя индуктивность ДГР. Для чего процессор 2 формирует управляющие сигналы на входах-выходах управляемого коммутатора 8 для микропроцессора 22, который подключает к механизму перемещения плунжера, в зависимости от знака расстройки, или контактную группу 20, при этом плунжер ДГР движется вниз, или контактную группу 21, инициирую перемещение плунжера вверх. В результате индуктивность ДГР изменяется в соответствии с величиной и знаком расстройки.
Вычисление расстройки в процессоре 2 осуществляется по формуле:
где: Eиск - ЭДС искусственной несимметрии,
em - напряжение смещения нейтрали (3U0),
φ - фаза напряжения 3U0,
β - опорная фаза.
Известно, что в точке резонанса в контуре нулевой последовательности напряжение смещения нейтрали 3U0 определяется векторной суммой напряжения естественной несимметрии 3U0ест и напряжения искусственной несимметрии 3U0иск. Превышение напряжением 3U0 допустимого максимального уровня (возникновение ОЗЗ не рассматриваем) или снижение 3U0 ниже допустимого уровня означает количественные изменения в нестабильной составляющей 3U0ест. При превышении напряжением на нейтрали значения 3U0max, соответствующего максимальному допустимому, или при возникновении ОЗЗ процессор 2 прекращает автоматическую подстройку реактора в резонанс до восстановления нормального режима работы сети и поддерживает достигнутую величину индуктивности ДГР неизменной.
При выполнении ФАП в случае понижения значения напряжения 3U0 до уровня ниже минимально допустимого, процессор 2 формирует команду на снятие новой регулировочной характеристики ДГР. Фиксируют амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу в данный момент времени, после чего переходит к автоматической настройке в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом по отношению полученных новых данных.
В результате в заявленном устройстве при настройке в резонанс обеспечивается возможность ФАП при одновременном контроле амплитуды 3U0, и при недопустимом снижении амплитуды 3U0 по отношению к максимальному значению, переход на амплитудную настройку в резонанс. Это позволяет учесть нестабильность погрешности, вносимой в настройку естественным смещением нейтрали. В результате гарантируется корректная работа фазового метода регулирования при допустимых смещениях нейтрали.
При повышении напряжения 3U0 выше порога обнаружения ОЗЗ (30% от номинального значения) устройство переходит в состояние работы при ОЗЗ. При снижении напряжения ниже порога (ниже 30% от номинального значения) на время не менее 1 секунды устройство возвращается к первоначальному режиму работы. Заявленное устройство в режиме ОЗЗ работает следующим образом. Процессор 2 работает в массштабе реального времени в соответствии с заложенной в него программой. Поскольку при ОЗЗ напряжение смещения нейтрали носит нестабильный характер, то процессор 2 рассчитывает среднедействующее значение напряжения смещения нейтрали, анализирует его величину и, в соответствии с полученным результатом, формирует управляющие сигналы на первой 16 и второй 17 коммутирующих группах управляемого коммутатора 8. Часы реального времени входят в состав процессора 2.
Процессор 2 постоянно, каждые 0,5 с, измеряет напряжение смещения нейтрали, поступающее на БАЦП 3 с выхода измерительной обмотки 11 ДГР1 и преобразованное в цифровой, и рассчитывает его среднедействующее значение. При обнаружении ОЗЗ (среднедействующее значение напряжения смещения нейтрали больше или равно 30% от номинального значения) процессор 2 задает выдержку времени, необходимую для самоустранения ОЗЗ - от 0,5 до 2 с. Поскольку в штатном режиме ДГР1 настроен в резонанс с емкостью сети, то это обеспечивает ограничение перенапряжений при возникновении ОЗЗ, а также бестоковую паузу, способствующую самопогасанию дуги после единичного замыкания на землю. По окончании времени выдержки процессор 2 вновь измеряет напряжение смещения нейтрали и рассчитывает его среднедействующее значение. При неустранении замыкания процессор 2 выдает на вход управляемого коммутатора 8 сигнал, по которому замыкаются контакты первой 16 коммутирующей группы и кратковременно подключают параллельно управляющей 10 обмотке ДГР1 первый 14 резистор с наибольшей величиной сопротивления. При этом через место повреждения начинает протекать суммарный активный ток ОЗЗ (активный ток, обусловленный возникновением ОЗЗ, и добавочный ток, сформированный в результате подключения резистора 14), который способствует переходу дугового перемежающегося пробоя в установившееся замыкание и инициирует надежное срабатывание сетевых защит, формируя, тем самым, необходимые условия для срабатывания простых токовых защит и защит терминалов присоединений.
По истечении времени, необходимого для отстройки от переходных процессов, процессор 2 вновь измеряет напряжение смещения нейтрали и рассчитывает его среднедействующее значение. Измерение напряжения смещения выполняется при подключенном резисторе. При этом расчет и оценка величины среднедействующего значения напряжения смещения и принятие по результатам решения выполняются каждые 0,5 с в течение времени, необходимого для срабатывания защиты. Если значение напряжения смещения меньше 30% от номинального среднедействующего значения напряжения смещения нейтрали для данной сети, то ОЗЗ считают ликвидированным. При неустранении замыкания в течение времени, необходимого для срабатывания защиты, и при среднедействующем значении напряжения смещения нейтрали больше 50%, процессор выдает на входы-выходы управляемого коммутатора 8 управляющий сигнал, по которому контакты первой 16 коммутирующей группы остаются замкнутыми и по-прежнему подключают параллельно управляющей 11 обмотке ДГР1 первый 14 резистор с наибольшей величиной сопротивления. По истечение времени, необходимого для отстройки от переходных процессов, процессор 2 вновь измеряет напряжение смещения нейтрали и рассчитывает его среднедействующее значение. Если величина среднедействующего значения напряжения смещения нейтрали меньше 30% от номинального значения для данной сети, то ОЗЗ считают ликвидированным.
Если величина среднедействующего значения напряжения смещения нейтрали находится в пределах от 33 до 50% от ее номинального значения, то процессор 2 формирует на входах-выходах управляющего коммутатора 2 сигнал, по которому срабатывает вторая 17 коммутирующая группа, контакты которой замыкаются, и параллельно управляющей 10 обмотке ДГР1 кратковременно подключают второй резистор 15, величина сопротивления которого составляет половину от величины сопротивления первого резистора 14, подключаемого в первый раз.
Если результаты расчетов процессора 2 показали, что короткое замыкание не ликвидировано и величина среднедействующего значения напряжения смещения нейтрали ниже 33%, но больше или равна 30% от номинального значения, то процессор 2 формирует на входах-выходах управляемого коммутатора 2 сигнал, по которому срабатывают одновременно первая 16 и вторая 17 коммутирующие группы управляемого коммутатора 8, которые своими контактами соединяют параллельно резисторы первый 14 и второй 15 и кратковременно, на время, достаточное для срабатывания защит, подключают их параллельно управляющей 10 обмотке ДГР1. При этом величина подключенного сопротивления составляет одну треть от величины сопротивления первого резистора 14, подключаемого в первый раз.
По истечение времени, необходимого для отстройки от переходных процессов, процессор 2 вновь через каждые 0,5 с измеряет напряжение смещения нейтрали и рассчитывает его среднедействующее значение. Если по истечении времени, достаточного для срабатывания защит, последние результаты расчетов процессора 2 показали, что ОЗЗ не исчезло, то процессор 2 по прошествии 5 секунд с самого начала устранения замыкания полностью отключает все резисторы и формирует для управляемого коммутатора 8 команды для повторения вышеописанных операций.
При этом значение активного тока при ОЗЗ в поврежденном присоединении может составлять максимальное - 20 А в сети 10 кВ и 30 А в сети 6 кВ. Однако в заявленном устройстве максимальное и последующие значения сопротивления резистора кратковременно подключаемого к управляющей 10 обмотке ДГР1 являются вполне определенной величиной. Это определяется тем, что при первом подключении величину сопротивления резистора 14 выбирают из условия получения величины суммарного активного тока в месте ОЗЗ, равной максимально допустимой величине для данной сети при металлическом замыкании на землю с малым сопротивлением в месте ОЗЗ, а для последующих подключений величины сопротивлений резисторов 15 и их параллельного соединения непосредственно соответствуют измененным среднедействующим значениям напряжения смещения нейтрали и величина их сопротивления составляет часть от величины сопротивления первого резистора 14. В результате, предлагаемый выбор максимального и последующих значений сопротивлений подключаемого резистора гарантированно исключает возможность превышения максимально допустимых значений активного тока при ОЗЗ в поврежденном присоединении, обеспечивает возможность срабатывания защиты при активных токах в месте повреждения, близких по значению к максимально допустимым, но гарантированно не превышающих их. В результате, после подключения управляемого резистора не требуется дополнительного контроля наличия превышения суммарным активным током максимально допустимого значения. Это обеспечивает надежное срабатывание сетевых защит, одновременно обеспечивая повышение надежности работы электрической сети.
При этом в заявленном устройстве подключаемый резистор формирует требуемый суммарный активный ток в месте повреждения при ОЗЗ для диапазона значений напряжения смещения нейтрали, которые являются характерными для ОЗЗ. Возможность использования заданного интервала значений напряжения смещения нейтрали для принятия решения о выборе номинала подключаемого резистора исключает необходимость пошагового подбора номинала резистора, что обеспечивает достижение заявленного технического результата.
Кроме того, в заявленном устройстве предусмотрена защита управляющей обмотки ДГР1 от перенапряжений, возникающих при отключении резисторов 14, 15, т.е. при размыкании контактов коммутирующих групп 16, 17 управляемого коммутатора 8. Для этого параллельно каждой коммутирующей группе 16, 17 управляемого коммутатора 8 подключены первая 18 и вторая 19 последовательные RC-цепи соответственно. Параметры RC-цепи 18, 19 выбирают из условия ограничения величины перенапряжения в управляющей 10 обмотке ДГР 1 при размыкании контактов коммутирующих групп 16, 17 управляемого коммутатора 8. В момент размыкания контактов, в момент отключения резистора, между размыкаемыми контактами коммутирующих групп управляемого коммутатора кратковременно возникает электрическая дуга, при гашении которой возникает обрыв тока, что приводит к броску напряжения в управляющей 10 вторичной обмотке ДГР1. Элементы RC-цепей 18,19 шунтируют размыкающиеся контакты коммутирующих групп 16, 17 управляемого коммутатора 8 при каждом отключении резисторов 14, 15, оставаясь подключенными при этом параллельно управляющей обмотке ДГР1 и ограничивая величину перенапряжения в обмотке до допустимой величины. В штатном режиме RC-цепи 18, 19 постоянно подключены параллельно управляющей 10 обмотке. Однако в штатном режиме RC-цепи 18, 19 не влияют на работу ДГР1, так как при требуемых параметрах RC-цепи ток конденсатора должен иметь величину емкости, обеспечивающую ограничение перенапряжений в управляющей 10 обмотке до допустимой величины. При этом ток, протекающий через RC-цепь, мал и составляет, примерно, 1 А в основной 9 обмотке ДГР1 при ОЗЗ. При этом, поскольку параметры RC-цепи выбирают из условия ограничения величины перенапряжения в управляющей 10 обмотке ДГР1 при размыкании контакта, которые более жесткие, по сравнению с требованиями для предотвращения подгорания контактов, то в результате в заявленном устройстве подключение RC-цепей 18, 19 параллельно к контактам коммутирующих групп 16, 17 управляемого коммутатора 8 в момент их размыкания решает одновременно и задачу предотвращения подгорания контактов коммутирующих групп 16, 17.
Заявленные способ автоматической настройки плунжерного дугогасящего реактора и устройство для автоматической настройки плунжерного дугогасящего реактора реализовали с плунжерным дугогасящим реактором (реактор с регулируемым магнитным зазором), выполненным в соответствии с патентом №2392683, дата приоритета 13.10.2008 г., и изготавливаемым предприятием ООО ВП «Наука, техника, бизнес в энергетике», г.Екатеринбург.
Дугогасящий реактор содержит магнитопровод с регулируемым магнитным зазором и обмотками, основной и дополнительными вторичными обмотками, а именно: измерительной и управляющей. Напряжение на управляющей обмотке составляло 500 В. Номиналы резисторов R1 и R2 составили 2 и 1 кОм. В качестве процессора был использован 32-разрядный микропроцессор архитектуры ARM7. В состав процессора входят часы реального времени. В управляемом коммутаторе были использованы семисторные ключи с опторазвязкой, которые коммутируют переменный ток.
Устройство содержит внутренний (несъемный) флеш-диск объемом не менее 4 Мбайт. Емкость журнала событий 16384 события. Емкость памяти долговременного регистратора (самописца) не менее 1,5 лет.
Устройство может обмениваться данными посредством следующих цифровых интерфейсов: SD-Card, RS-232, USB, 2 канала CAN2.0; RS-485; Ethernet 10/100 BASE-TX.
Поддерживается работа с картами памяти стандарта SecureDigital или MultiMedia Card объемом до 2 Гбайт с файловой системой FAT 16.
Интерфейсы CAN и RS-485 снабжены встроенными терминаторами величиной 120 Ом, которые при необходимости могут быть задействованы при помощи переключателей.
Внешние цепи устройства (за исключением интерфейсов RS-232 и USB) выполнены с гальванической развязкой относительно корпуса и внутренних цепей.
Интерфейс RS-232 предназначен для обновления и восстановления встроенного программного обеспечения.
Интерфейс USB обеспечивает доступ со стороны компьютера к внутреннему флеш-диску УАРК, как съемному внешнему носителю, что позволяет производить как считывание данных с него, так и обновление хранящихся на нем служебных файлов.
SD-карта используется для выполнения следующих функций:
перезапись текущих данных (журнал событий, данные самописца) с внутреннего диска для последующей обработки на компьютере;
резервное копирование и восстановление настроечных данных;
обновление встроенного программного обеспечения;
накопление аварийных файлов.
Отображение текущего состояния обеспечивается светодиодными индикаторами и графическим жидкокристаллическим дисплеем.
Были получены следующие основные технические характеристики заявленного устройства: допустимый уровень естественной несимметрии, %, не более 0,75; диапазон измерения расстройки, %, -100…100; точность измерения расстройки вблизи резонанса, %, 1,0; точность настройки ДГР, %, не более 1,0; ширина зоны нечувствительности, % ±0,1…10; диапазон регулирования расстройки, %, ±10.
Работу процессора обеспечивает программа, разработанная предприятием ООО ВП «Наука, техника, бизнес в энергетике»: «Управляющая программа для устройства автоматического регулирования компенсации» («Управляющая программа УАРК-105»).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УВЕЛИЧЕНИЯ АКТИВНОГО ТОКА ОДНОФАЗНОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ В КОМПЕНСИРОВАННЫХ ЭЛЕКТРИЧЕСКИХ СЕТЯХ С НЕЙТРАЛЬЮ, ЗАЗЕМЛЕННОЙ ЧЕРЕЗ ДУГОГАСЯЩИЙ РЕАКТОР, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455743C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ДУГОГАСЯЩЕГО РЕАКТОРА | 2012 |
|
RU2508584C1 |
| Способ настройки дугогасящего реактора и устройство для его реализации | 2020 |
|
RU2754360C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ДУГОГАСЯЩЕГО РЕАКТОРА | 2009 |
|
RU2404501C1 |
| Способ компенсации естественной несимметрии сети с нейтралью, заземлённой через регулируемый дугогасящий реактор | 2016 |
|
RU2612321C1 |
| Способ контроля правильности подключения присоединений в устройстве определения повреждённого фидера в сетях с нейтралью, заземлённой через дугогасящий реактор | 2019 |
|
RU2718471C1 |
| Способ автоматической компенсации тока однофазного замыкания на землю в сети с дугогасящим реактором в нейтрали | 2016 |
|
RU2655670C2 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Устройство для автоматической настройки дугогасящего реактора | 1984 |
|
SU1228182A1 |
| Способ и устройство измерения емкостного тока электрической сети с плавнорегулируемым дугогасящим реактором | 2019 |
|
RU2723898C1 |
Изобретение касается автоматической компенсации емкостных токов замыкания на землю. Согласно способу при отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности дугогасящего реактора (ДГР) с емкостью распределительной сети, что включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0 и сравнение его с фазой эталонного опорного напряжения. Устройство, осуществляющее способ, содержит плунжерный ДГР, основную обмотку, вывод которой подключен к нейтрали сети, блок управления, подключенный к выходу блока управления, управляемый коммутатор, выход которого является выходом управления плунжером ДГР, и измерительный трансформатор напряжения, подключенный входами параллельно к фазам распределительной линии. Дополнительно введены адресно-информационная шина, несимметричный присоединительный трансформатор со встроенным источником смещения нейтрали, блок аналого-цифрового преобразования и измерительный трансформатор тока основной обмотки ДГР. В качестве блока управления используют цифровой процессор, а ДГР содержит две дополнительные вторичные обмотки: управляющую и сигнальную. Технический результат - повышение точности настройки в резонанс, расширение функциональных возможностей и повышение надежности работы электрической сети. 2 н. и 2 з.п. ф-лы, 1 ил.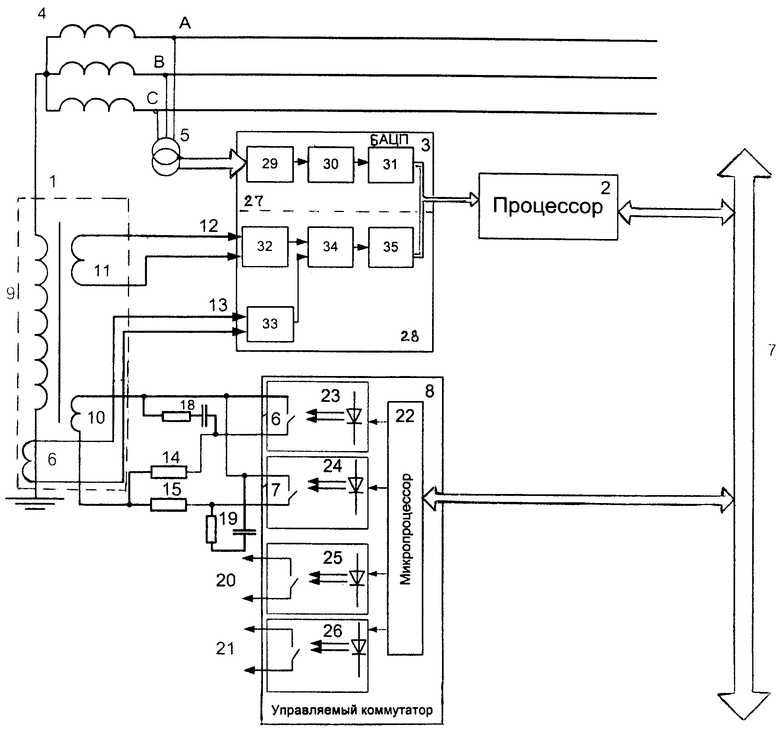
1. Способ автоматической настройки плунжерного дугогасящего реактора, в соответствии с которым при отсутствии однофазного замыкания на землю (ОЗЗ) выполняют автоматическую настройку в резонанс индуктивности дугогасящего реактора (ДГР) с емкостью распределительной сети, которое включает создание искусственного смещения нейтрали, измерение фазового угла напряжения на нейтрали 3U0, сравнение его с фазой эталонного опорного напряжения, для чего в качестве опорной выбирают фазу линейного напряжения, и изменение индуктивности ДГР в соответствии с величиной и знаком расстройки до получения резонанса, при этом при превышении напряжением на нейтрали значения, соответствующего максимальному допустимому, или при возникновении однофазного замыкания на землю (ОЗЗ) индуктивность ДГР поддерживают неизменной до восстановления нормального режима работы сети, отличающийся тем, что напряжение на нейтрали 3U0 измеряют посредством дополнительной вторичной обмотки ДГР, кроме того, предварительно после создания искусственного смещения нейтрали снимают регулировочную характеристику ДГР, представляющую собой зависимость амплитуды и фазы напряжения на нейтрали 3U0 от положения плунжера, запоминают максимальное значение амплитуды напряжения на нейтрали 3U0max и соответствующую ему фазу, после этого возвращают плунжер в положение, соответствующее 3U0max, затем выполняют автоматическую настройку в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом, если во время настройки ДГР по фазовому методу значение напряжения 3U0 опускается ниже минимально допустимого уровня, то осуществляют переход на амплитудный метод настройки, для чего вновь снимают регулировочную характеристику ДГР и фиксируют амплитуду и фазу напряжения смещения нейтрали 3U0, соответствующие резонансу в данный момент времени, после чего переходят к автоматической настройке в резонанс индуктивности ДГР с емкостью распределительной сети фазовым методом.
2. Устройство для автоматической настройки плунжерного дугогасящего реактора, содержащее плунжерный дугогасящий реактор (ДГР), содержащий основную обмотку, первый вывод которой подключен к нейтрали сети, блок управления, подключенный к выходу блока управления управляемый коммутатор, выход которого является выходом управления плунжером ДГР, измерительный трансформатор напряжения, подключенный первым, вторым и третьим входами параллельно к фазам распределительной линии А, Б и С соответственно, отличающееся тем, что дополнительно введены адресно-информационная шина, несимметричный присоединительный трансформатор со встроенным источником смещения нейтрали, блок аналого-цифрового преобразования (БАЦП), измерительный трансформатор тока основной обмотки ДГР, а в качестве блока управления используют цифровой процессор, кроме того, ДГР содержит две дополнительные вторичные обмотки: управляющую обмотку и сигнальную для измерения напряжения смещения нейтрали, при этом первый вывод основной обмотки подключен к нейтрали сети через несимметричный присоединительный трансформатор, а второй вывод заземлен через последовательно соединенный измерительный трансформатор тока основной обмотки, при этом выводы сигнальной обмотки и выводы измерительного трансформатора тока основной обмотки ДГР подключены соответственно к первому и второму входам БАЦП, группа входов которого подключена к выходам измерительного трансформатора напряжения, а группа выходов подключена к соответствующим информационным входам блока управления, адресно-информационные входы-выходы которого и входы-выходы управляемого коммутатора подключены к адресно-информационной шине, при этом управляемый коммутатор содержит коммутирующие группы с первой по четвертую, кроме того, в устройство введены первый и второй резисторы, первые выводы которых соединены между собой и подключены к одному из выводов управляющей обмотки, к свободному выводу которой подключены неподвижные контакты первой и второй коммутирующих групп управляемого коммутатора, а замыкающие контакты подключены соответственно к вторым выводам первого и второго резисторов, кроме того, параллельно первой и второй коммутирующим группам управляемого коммутатора подключены дополнительно введенные первая и вторая последовательные RC-цепи соответственно, при этом третья и четвертая коммутирующие группы управляемого коммутатора являются выходом управления плунжером ДГР.
3. Устройство для автоматической настройки плунжерного дугогасящего реактора по п.2, отличающееся тем, что управляемый коммутатор содержит микропроцессор и семисторные ключи с опторазвязкой с первого по четвертый, входы которых подключены к управляющим выходам микропроцессора, а входы-выходы микропроцессора являются входами-выходами управляемого коммутатора, при этом коммутирующие контакты ключей с первого по четвертый являются соответственно первой, второй, третьей и четвертой коммутирующими группами управляемого коммутатора.
4. Устройство для автоматической настройки плунжерного дугогасящего реактора по п.2, отличающееся тем, что блок аналого-цифрового преобразования содержит модуль ввода фазных напряжений, входы которого являются группой входов БАЦП, и модуль ввода напряжения смещения нейтрали и тока основной обмотки ДГР, при этом модуль ввода фазных напряжений содержит по числу фаз соединенные последовательно преобразователи напряжение - напряжение, аналого-цифровые преобразователи (АЦП) и узлы гальванической развязки, кроме того, модуль ввода напряжения смещения нейтрали и тока главной обмотки ДГР содержит АЦП, преобразователь напряжение - напряжение, преобразователь ток - напряжение и узел гальванической развязки, при этом выходы преобразователя напряжение - напряжение и преобразователя ток - напряжение подключены к соответствующим входам АЦП, выход которого подключен к входу узла гальванической развязки, при этом, входы преобразователя напряжение - напряжение и преобразователя ток - напряжение являются соответственно первым и вторым входами БАЦП, а выходы узлов гальванической развязки являются группой выходов БАЦП.
| Устройство для автоматической настройки дугогасящего реактора | 1986 |
|
SU1302376A1 |
| RU 2002112895 А, 20.12.2003 | |||
| Прибор для измерения и нанесения лунок или отпечатков на поверхности цилиндров двигателей | 1949 |
|
SU88221A1 |
| US 3992661 А1, 16.11.1976 | |||
| US 4555658 A1, 26.11.1985. | |||

