Изобретение относится к транспортным средствам на воздушной подушке.
Известен аппарат на воздушной подушке, содержащий корпус с водительским и пассажирским отделением, осевой нагнетатель воздуха, ресивер с обшивкой, двигатель, соединенный с осевым нагнетателем, воздушный винт, установленный на пилоне, двигатель воздушного винта, воздушный руль, установленный в потоке, посадочные полозья, гибкое ограждение, механизмы управления (Ежи Бень, Модели и любительские суда на воздушной подушке, пер. с польск., Л., Судостроение, 1983, с.113-116, рис.97).
Известен аппарат на воздушной подушке, содержащий корпус с отсеком плавучести, кабину водителя и пассажира, воздухозаборник, нагнетатель подъемной системы, двигатель, соединенный с нагнетателем, ресивер с обшивкой, воздушно-реактивный движитель, посадочные полозья, гибкое ограждение, механизмы управления (там же, с.115, рис.98).
Известен аппарат на воздушной подушке “Калибан-3”, содержащий понтон из продольного и поперечного наборов с несущей обшивкой, кабину, осевой нагнетатель воздуха, бортовые ресиверы, двигатель, соединенный с осевым нагнетателем, воздушный винт в канале, редуктор, воздушные рули в потоке, посадочное устройство, механизмы управления (там же, с.121-123, рис.100).
Недостатки аналогов: небольшая подъемная сила, малая высота преодолеваемых препятствий, недостаточная маневренность.
Указанные недостатки обусловлены конструкцией аппаратов на воздушной подушке.
Известен также аппарат на воздушной подушке “Саундерс-Ро” SR. №1 “Ховеркрафт”, содержащий корпус с кабиной водителя и пассажира в форме овального понтона, центральный воздухозаборник с направляющими лопатками, осевой нагнетатель воздуха, ресивер с обшивкой, двойные кольцевые каналы несущей системы, передние и задние горизонтальные каналы с соплами и воздушными рулями системы горизонтального перемещения, пневматически соединенные с ресивером, двигатель, кинематически соединенный через разобщительную муфту с осевым нагнетателем воздуха, колесное посадочное шасси, механизмы управления. Масса аппарата 1,88 т, скорость 107 км/час, несущая поверхность 22,8 м2, двигатель 320 кВт, давление под днищем от 500 до 1000 Па, два задних горизонтальных канала для движения вперед, два передних горизонтальных канала для торможения и движения задним ходом, расход воздуха для создания воздушной подушки 70% от общего количества воздуха, для создания тяги для движения 30%, экипаж 2 чел. (там же, с.5-7, рис.1).
Известный аппарат на воздушной подушке “Саундерс-Ро” SR. №1 “Ховеркрафт”, как наиболее близкий по технической сущности и достигаемому полезному результату, принят за прототип.
Недостатки известного аппарата на воздушной подушке те же.
Указанные недостатки обусловлены конструкцией аппарата на воздушной подушке.
Задачей настоящего изобретения является повышение технических характеристик аппарата на воздушной подушке.
Технический результат обеспечивается тем, что в аппарате на воздушной подушке, содержащем корпус в форме понтона, кабину с водителем и пассажиром, центральный воздухозаборник с направляющими лопатками, внутри которого размещен нагнетатель воздуха, ресивер с обшивкой, двойные кольцевые каналы, соединенные с ресивером, двигатель, через разобщительную муфту соединенный с осевым нагнетателем воздуха, передние и задние движители горизонтального перемещения с воздушными заслонками, пневматически соединенные с ресивером, передние и задние вертикальные сопла, пневматически соединенные с ресивером, колесное посадочное шасси, механизмы управления, согласно изобретению сверху, на некотором расстоянии от корпуса, на вертикальных стойках закреплена аэродинамическая платформа, выполненная в форме двух прямоугольных плит, изготовленных из легкого и прочного материала, наложенных симметрично друг на друга и соединенных между собой болтами, причем на верхней поверхности верхней плиты выполнены квадратные ячейки, расположенные рядами в продольном и поперечном направлениях, каждая из которых представляет собой воронкообразное углубление с двумя противоположными вертикальными плоскостями, между которыми расположены две противолежащие плоскости, наклоненные внутрь под углом друг к другу и имеющие в месте их соединения сквозной вертикальный щелевидный канал, по ширине равный ширине ячейки, на некотором расстоянии от которого сверху прикреплена пластина, кроме того, на верхней поверхности нижней плиты выполнены открытые сверху продольные каналы, пневматически соединенные между собой перемычками и с вертикальными щелевидными каналами ячеек верхней плиты, выходные концы которых соединены с центральным выходным отверстием, расположенным на нижней поверхности нижней плиты, которое соединено с центральным воздухозаборником, кроме того, механизмы управления аппаратом в пространстве кинематически связаны с передними и задними вертикальными соплами, а механизмы управления движением аппарата связаны с заслонками движителей горизонтального перемещения, причем сверху, на некотором расстоянии от верхней прямоугольной плиты, на стойках закреплен настил для грузового контейнера, а к нижней прямоугольной плите прикреплено гибкое ограждение.
Сущность изобретения поясняется чертежами, где
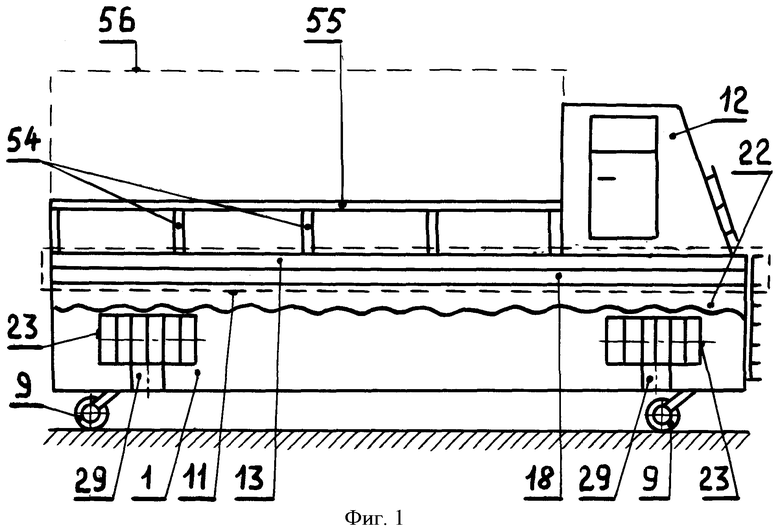
на фигуре 1 изображен общий вид аппарата на воздушной подушке;
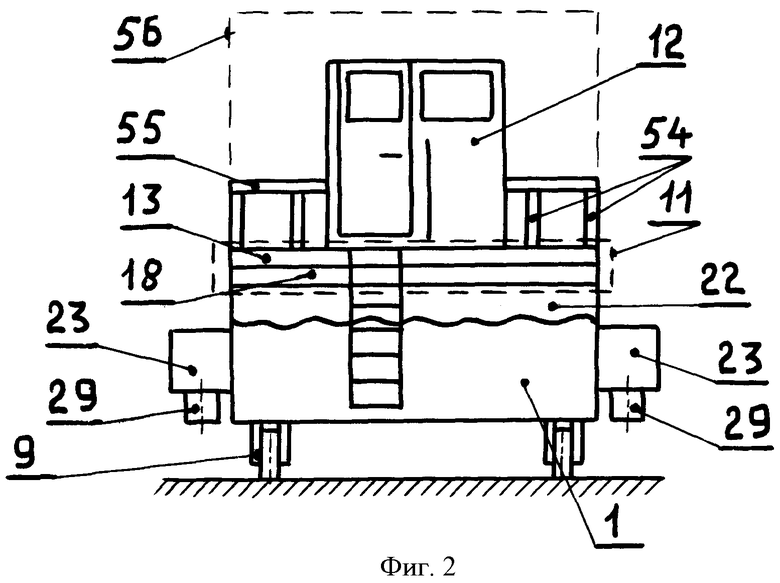
на фигуре 2 - вид аппарата на воздушной подушке спереди;
на фигуре 3 - схема несущей системы и динамического поддержания корпуса аппарата;
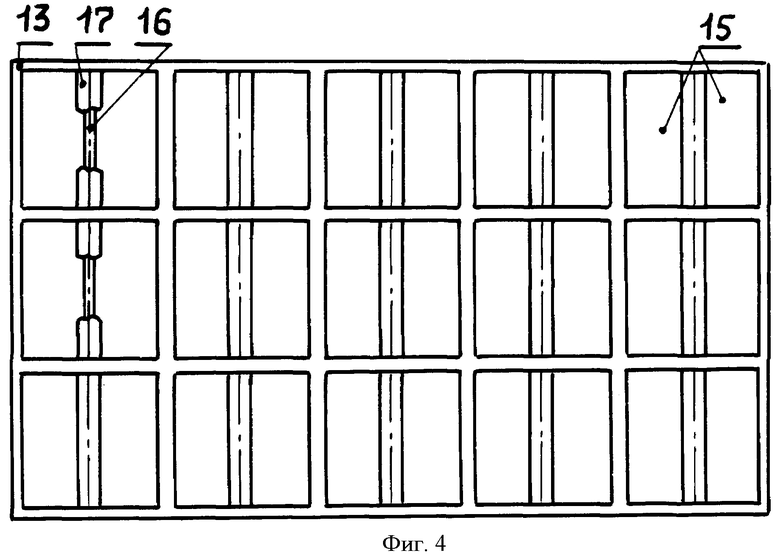
на фигуре 4 - вид сверху на верхнюю плиту аэродинамической платформы;
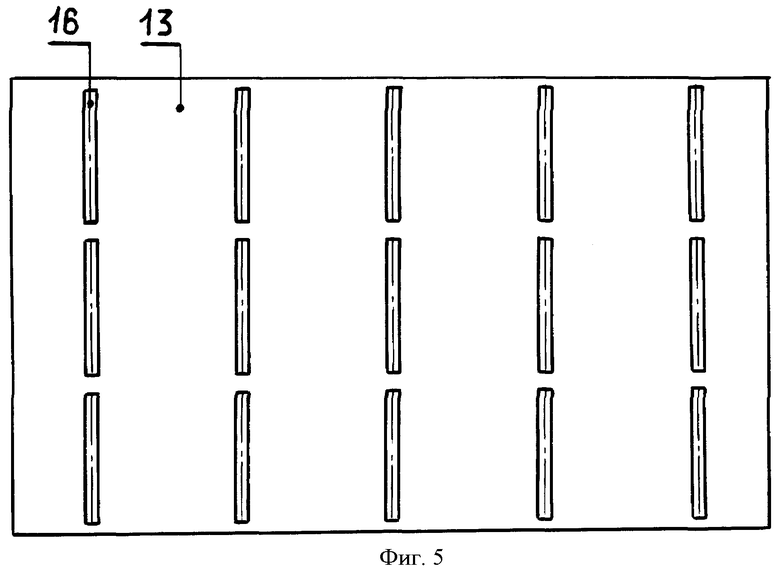
на фигуре 5 - вид снизу на верхнюю плиту аэродинамической платформы;
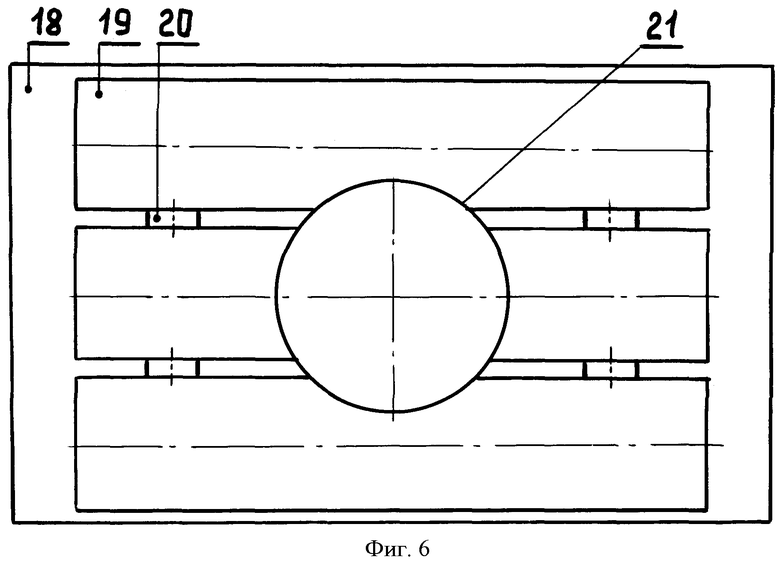
на фигуре 6 - вид сверху на нижнюю плиту аэродинамической платформы;
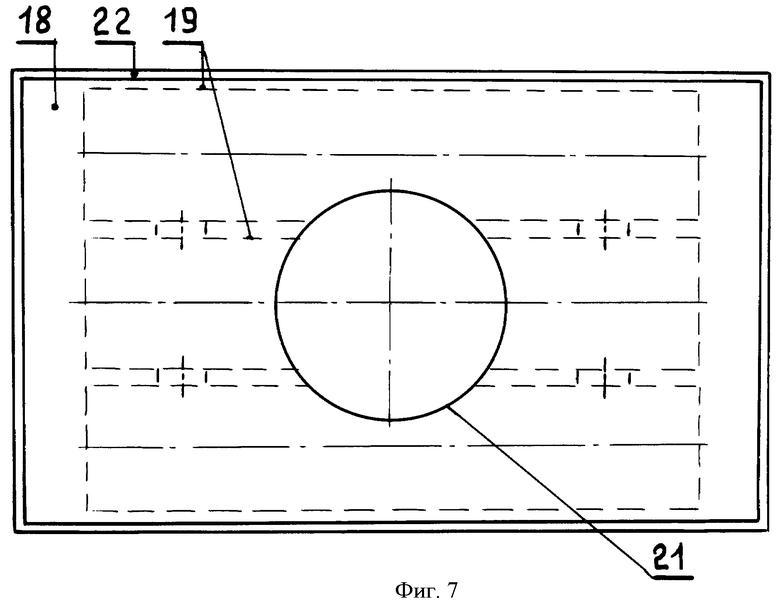
на фигуре 7 - вид снизу на нижнюю плиту аэродинамической платформы;
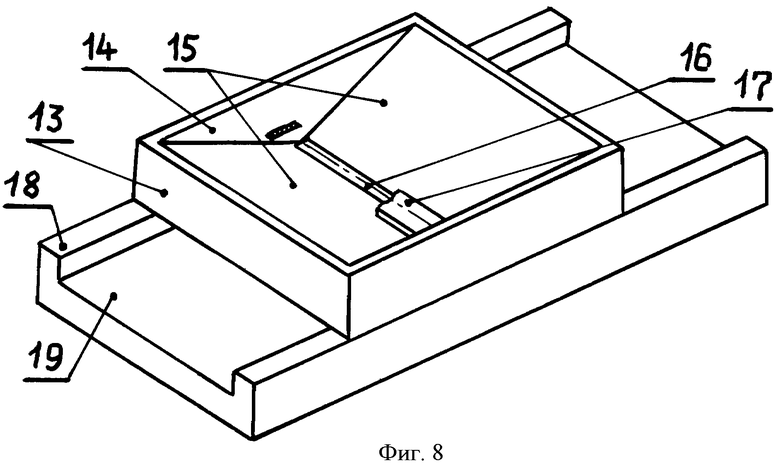
на фигуре 8 - общий вид ячейки верхней плиты;
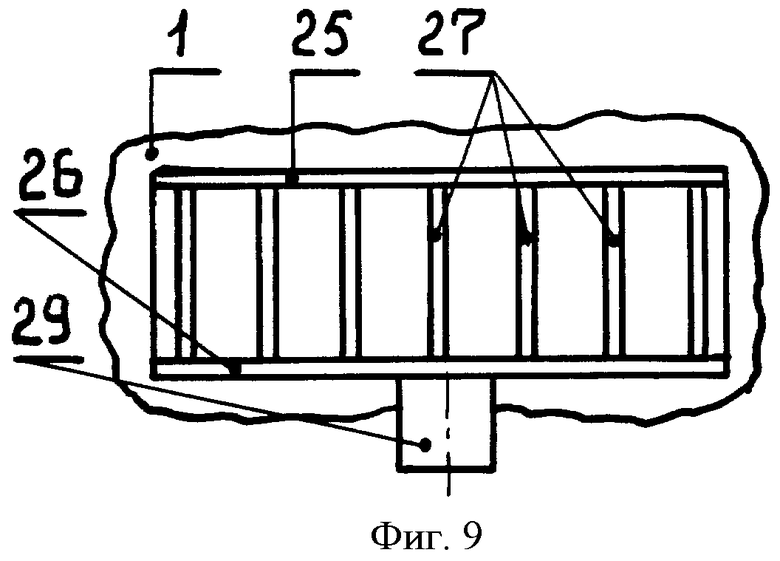
на фигуре 9 - общий вид движителя горизонтального перемещения;
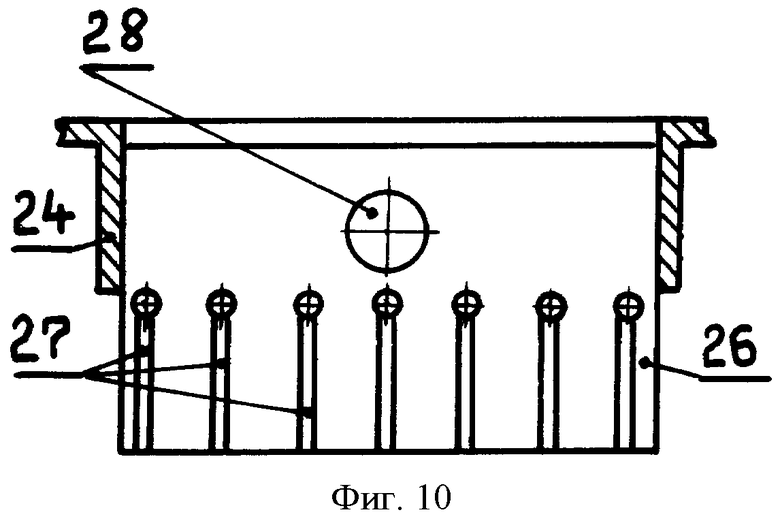
на фигуре 10 - вид на движитель горизонтального перемещения сверху в разрезе;
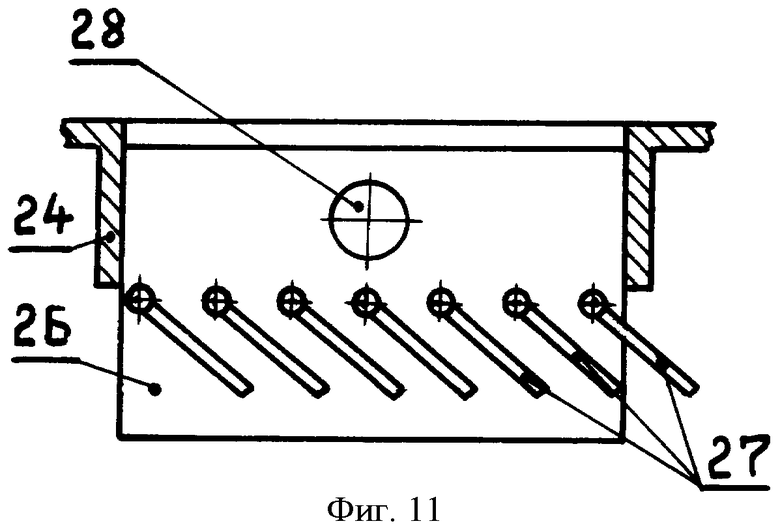
на фигуре 11 - положение заслонок движителя горизонтального перемещения при движении вперед;
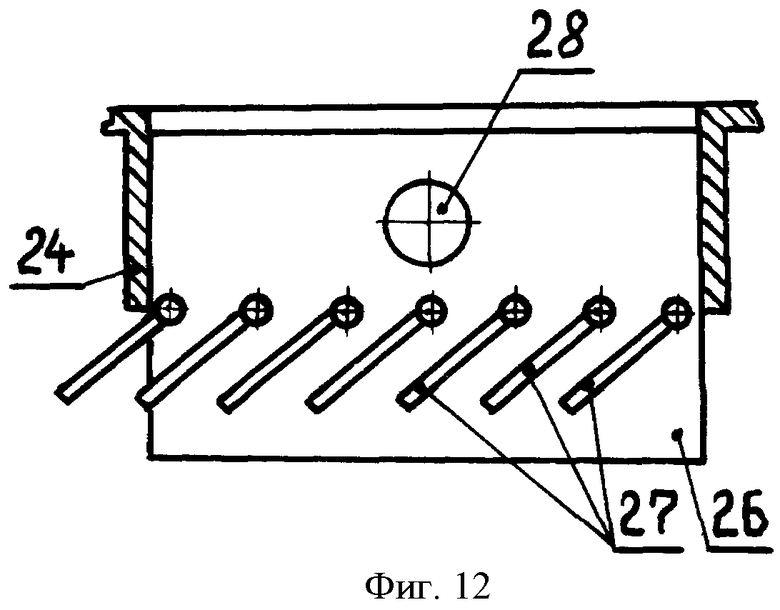
на фигуре 12 - положение заслонок движителя горизонтального перемещения при движении назад и торможении;
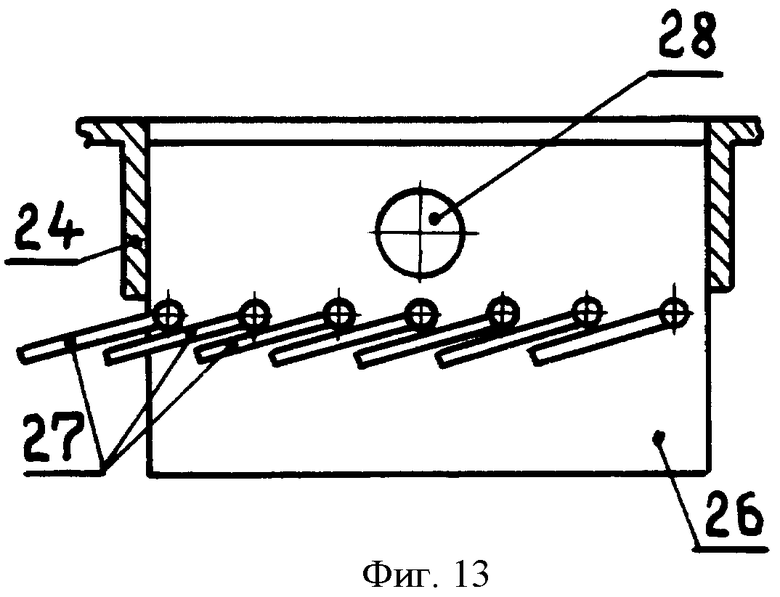
на фигуре 13 - вид на движитель горизонтального перемещения сверху в разрезе при закрытых заслонках;
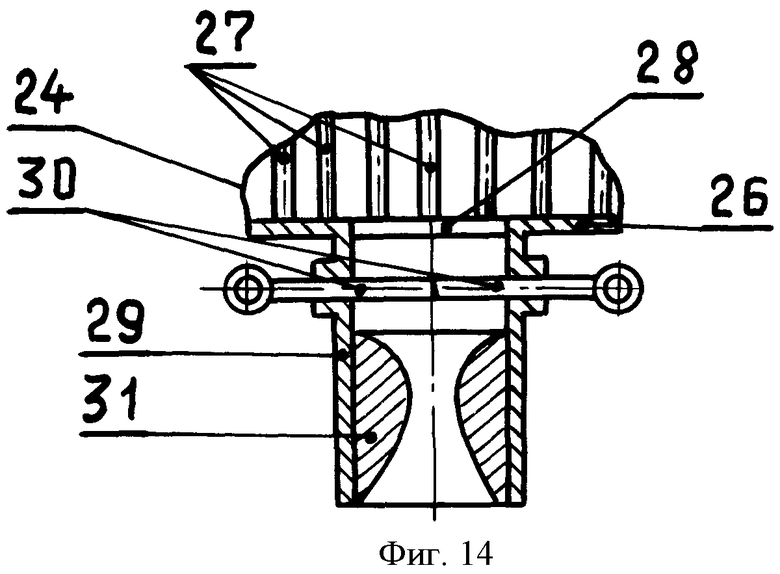
на фигуре 14 - устройство вертикального сопла;
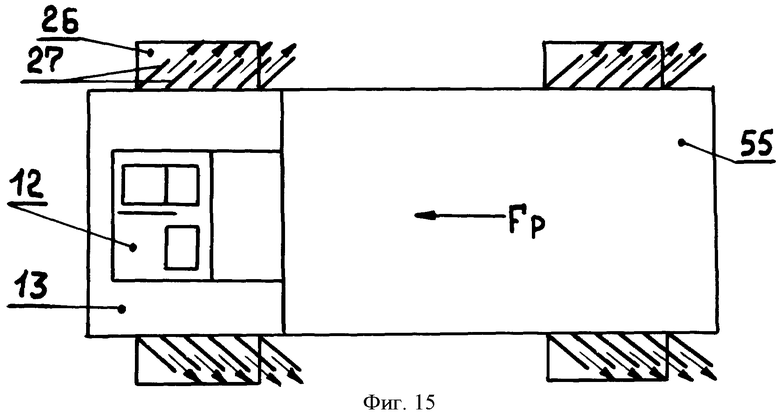
на фигуре 15 - схема движения аппарата вперед;
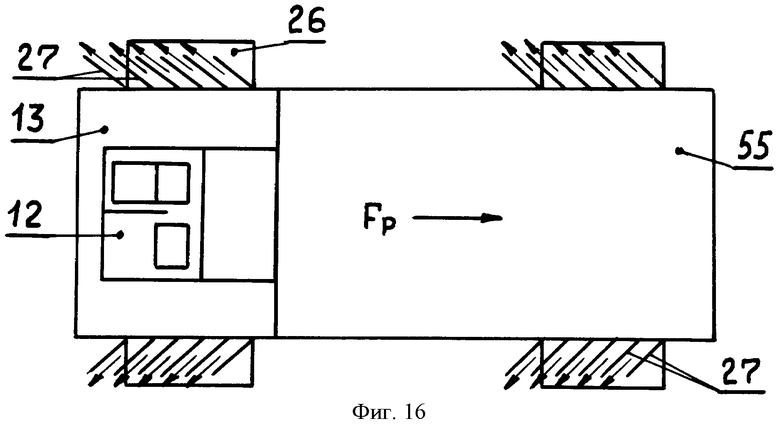
на фигуре 16 - схема движения аппарата назад и торможения;
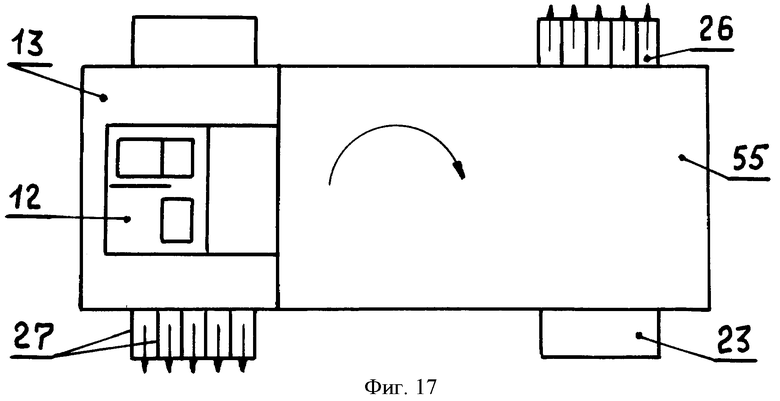
на фигуре 17 - схема поворота аппарата вправо;
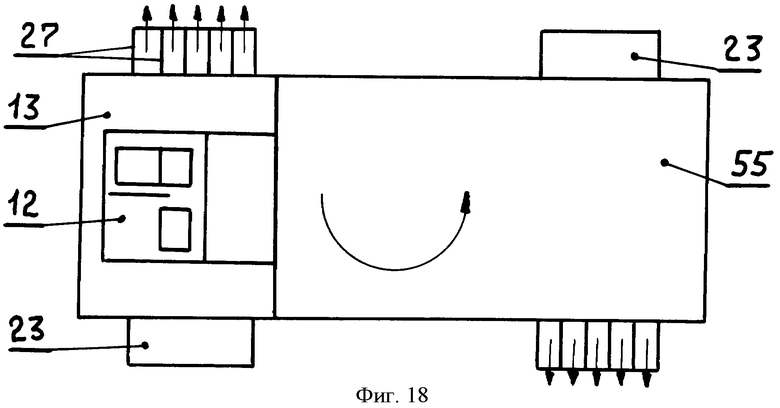
на фигуре 18 - схема поворота аппарата влево;
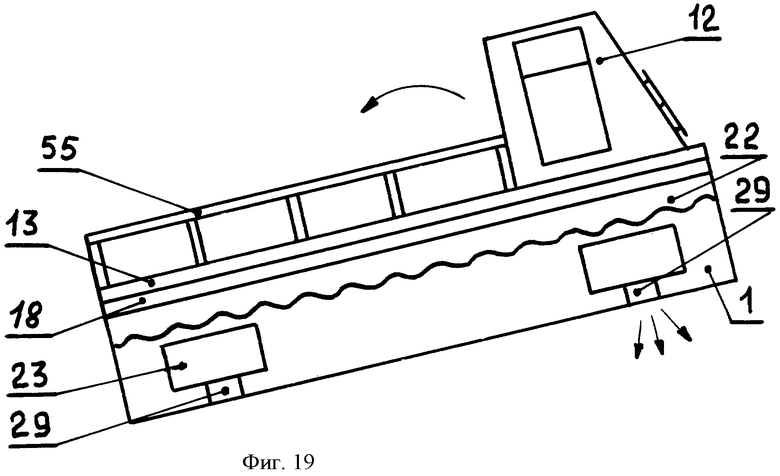
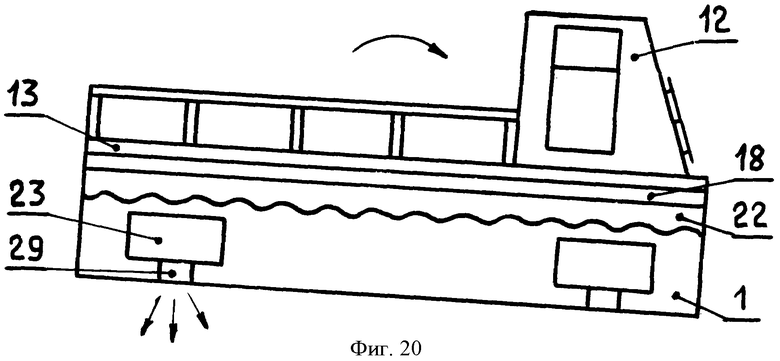
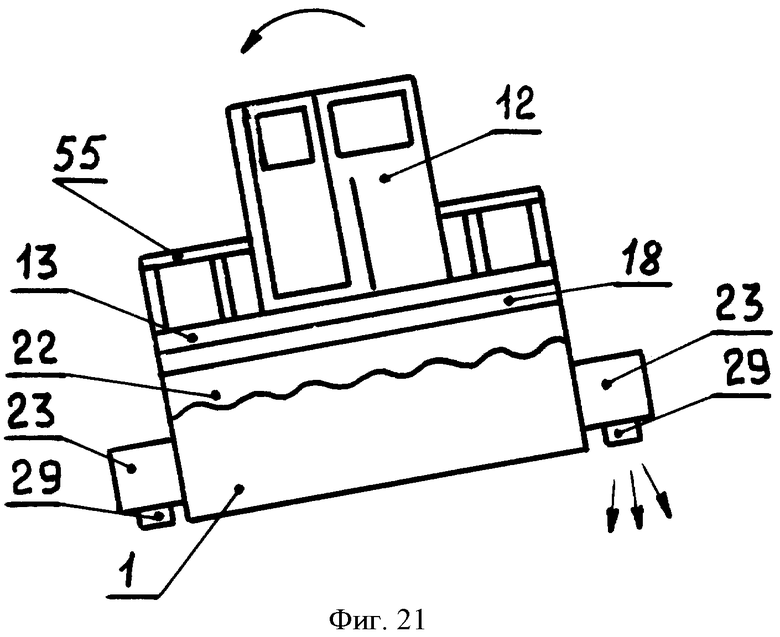
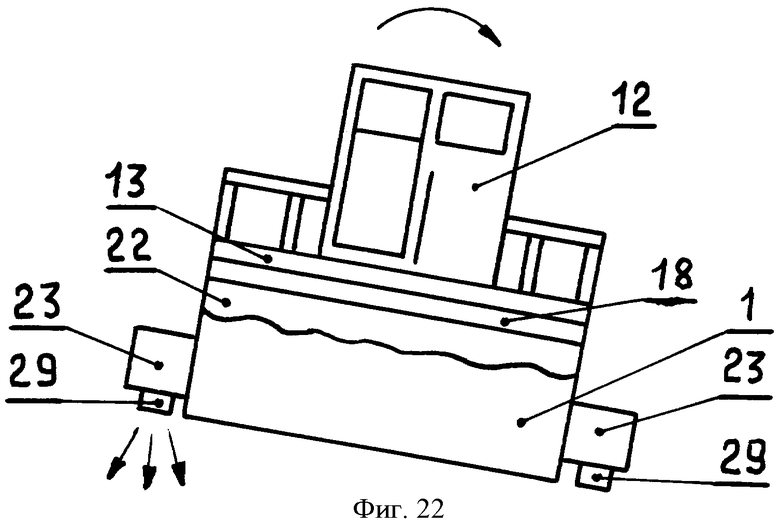
на фигурах 19, 20, 21, 22 - схема управления корпусом аппарата в пространстве;
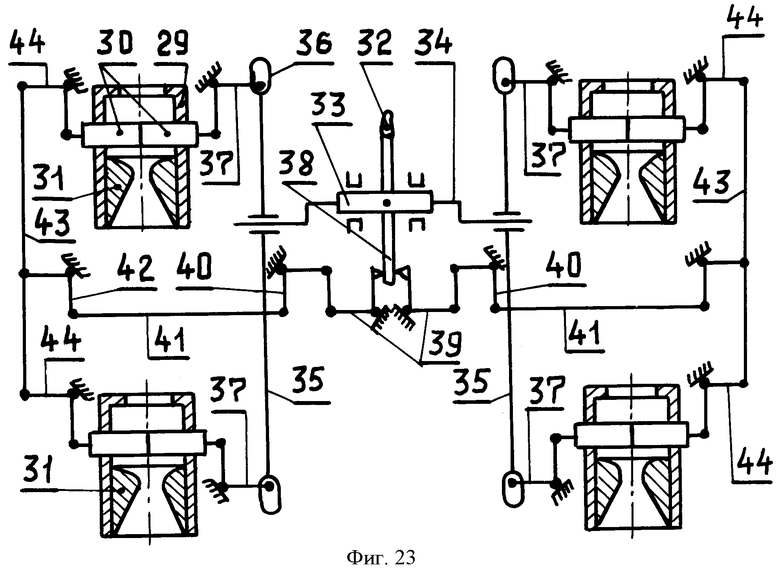
на фигуре 23 - схема механизма управления корпусом аппарата в пространстве;
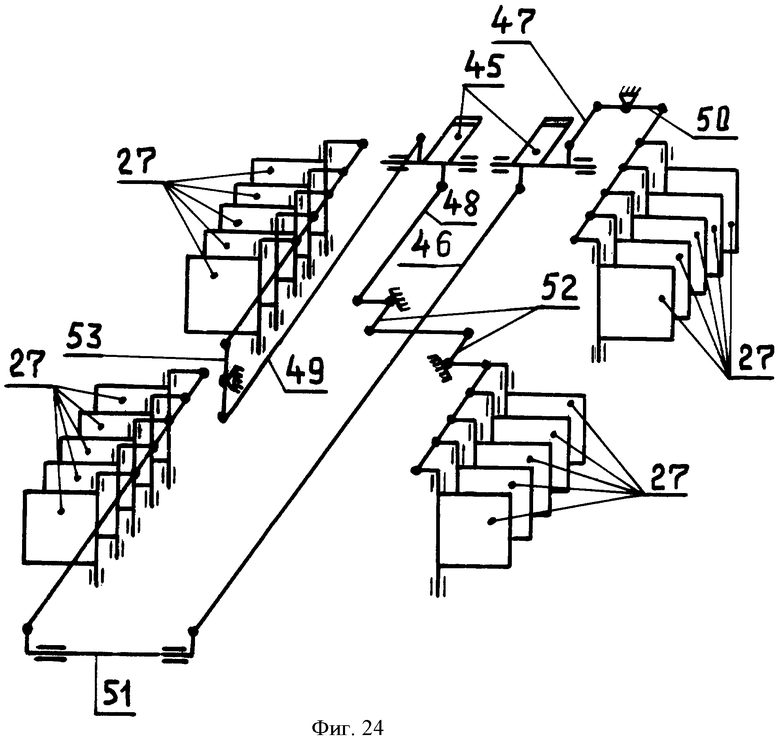
на фигуре 24 - схема механизма управления движителями горизонтального перемещения.
Аппарат на воздушной подушке с дополнительной аэродинамической поддержкой корпуса содержит корпус 1, имеющий центральный воздухозаборник 2 с направляющими лопатками 3. Внутри центрального воздухозаборника установлен осевой нагнетатель воздуха 4, который через разъединительную муфту 5 механически соединен с двигателем 6. Внутри корпуса размещен ресивер 7, который пневматически соединен с центральным воздухозаборником и двумя кольцевыми каналами 8. В нижней части корпуса прикреплено колесное посадочное шасси 9. К верхней части корпуса посредством вертикальных стоек 10, на некотором расстоянии от него, прикреплена аэродинамическая платформа 11, сверху, в передней части которой установлена кабина 12 водителя и пассажира. Аэродинамическая платформа выполнена в форме двух прямоугольных плит, изготовленных из легкого и прочного материала, наложенных симметрично друг на друга и соединенных между собой болтами. На верхней поверхности верхней плиты 13 выполнены квадратные ячейки, расположенные рядами в продольном и поперечном направлениях, каждая из которых представляет собой воронкообразное углубление с двумя противоположными вертикальными плоскостями 14, между которыми расположены две противолежащие плоскости 15, наклоненные внутрь под углом друг к другу и имеющие в месте их соединения сквозной вертикальный щелевидный канал 16, по ширине равный ширине ячейки. Сверху над ним, на некотором расстоянии, прикреплена пластина 17. На верхней поверхности нижней плиты 18 выполнены открытые сверху продольные каналы 19, пневматически соединенные со сквозными вертикальными щелевидными каналами верхней плиты, а между собой перемычками 20. Выходные концы продольных каналов соединены с выходным отверстием 21, которое соединено с центральным воздухозаборником. К нижней плите прикреплено гибкое ограждение 22. По бокам корпуса закреплены два передних и два задних движителя горизонтального перемещения 23. Каждый из них содержит корпус 24, соединенный с одним из кольцевых каналов. К корпусу прикреплены верхняя 25 и нижняя 26 крышки, между которыми шарнирно закреплены заслонки 27, обеспечивающие, в зависимости от их положения, движение аппарата вперед, назад, торможение, повороты вправо и влево, а также вращение на месте вокруг вертикальной оси. На нижней крышке каждого движителя горизонтального перемещения выполнено отверстие 28, которое соединено с соответствующим вертикальным соплом. Все сопла одинаковы по конструкции и каждое из них содержит корпус 29. Внутри корпуса установлены два клапана 30 и диффузор 31. Механизм управления аппаратом на воздушной подушке в пространстве содержит ручку управления 32, закрепленную шарнирно на валу 33, установленном на подшипниках и имеющем кривошипы 34, шарнирно связанные с продольными тягами 35, имеющими на концах серьги 36. Продольные тяги через рычаги 37 связаны с одним из клапанов каждого вертикального сопла. В нижней части ручка управления имеет полукруглый сектор 38, который взаимодействует с рычагами 39 и 40, которые через поперечные тяги 41, рычаги 42, продольные тяги 43 и рычаги 44 связаны со вторым клапаном каждого вертикального сопла.
Механизм управления движением аппарата на воздушной подушке содержит ножные педали 45, каждая из которых посредством продольных тяг 46, 47, 48, 49 и рычагов 50, 51, 53, 53 соединена с заслонками одного переднего и одного заднего движителей горизонтального перемещения. На верхней части верхней плиты аэродинамической платформы закреплены вертикальные стойки 54, на которых установлен настил 55 для крепления контейнера 56 с грузом.
Работа аппарата на воздушной подушке с дополнительной аэродинамической поддержкой корпуса.
После запуска двигателя 6 включается разобщительная муфта 6 и осевой нагнетатель воздуха 4 приходит в движение и начинает подавать воздух в ресивер 7, а на него через двойные кольцевые каналы 8 под корпус 1, приподнимая его над дорогой на некоторую высоту. Колесное посадочное шасси 9 механизмом, не показанным на чертежах, убирается внутрь корпуса 1. Прежде, чем попасть в центральный воздухозаборник 2, воздух всасывается ячейками аэродинамической платформы 11 и движется по противолежащим поверхностям 15 верхней плиты 13 со скоростью V (показано стрелками на фигуре 3). Пластина 17 обеспечивает пропуск воздуха через образованную щель и его движение по противолежащим наклонным поверхностям 15, уменьшая вертикальное движение потока воздуха в ячейке. Далее воздух через щелевидные вертикальные каналы 16 поступает в продольные каналы 19 нижней плиты 18 и затем через отверстие 21 попадает в центральный воздухозаборник 2. При движении воздуха по противолежащим поверхностям 15 на них образуется движущийся пограничный слой. Из аэродинамики известно, что давление в пограничном слое всегда меньше, чем в неподвижном воздухе. Так как по всей верхней поверхности верхней плиты 13, состоящей из противолежащих плоскостей 15, движется воздушный поток, то давление Р1 на ней меньше, чем давление Р на нижнюю поверхность нижней плиты 18. Разность этих давлений и будет той дополнительной подъемной силой, которая зависит от общей площади противолежащих поверхностей 15, высоты ячейки h, площади вертикального щелевидного канала 16, скорости движения воздушного потока, создаваемого осевым нагнетателем воздуха 4 и общей поверхностью нижней части нижней плиты 18. Возникающая дополнительная подъемная сила будет складываться с силой, создающей воздушную подушку, и ее величина будет изменяться в зависимости от частоты вращения вала двигателя 6. Гибкое ограждение 22 предотвращает обтекание воздушным потоком, при движении вперед или назад, нижней поверхности нижней плиты 18 и тем самым препятствует уменьшению подъемной силы аэродинамической платформы 11. Для движения вперед, назад, торможения и маневрирования используются движители горизонтального перемещения 23, управление которыми осуществляется посредством ножных педалей 45, имеющих три положения. В исходном положении педалей 45 заслонки 27 движителей горизонтального перемещения закрыты, как показано на фигуре 13. Для движения аппарата на воздушной подушке вперед необходимо нажать одновременно на обе ножные педали 45 и передвинуть их в первое положение. Продольные тяги 46, 47, 48, 49 и рычаги 50, 51, 52, 53 передвинут заслонки 27 всех четырех движителей горизонтального перемещения 23 в положение, показанное на фигуре 11. Часть воздуха, подаваемого осевым нагнетателем 4, будет истекать из щелей движителей горизонтального перемещения 23 назад, создавая реактивную силу Fp, которая станет перемещать корпус аппарата вперед (фиг.15). Для торможения или движения задним ходом обе ножные педали 45 одновременно передвигаются в третье положение. Заслонки 27 движителей горизонтального перемещения 23 займут положение, показанное на фигуре 12. Истекающий из щелей воздух создаст реактивную силу Fp, толкающую корпус 1 аппарата назад или уменьшающую его скорость при движении вперед (фиг.16). Для удержания корпуса аппарата неподвижно на одном месте при нахождении его на воздушной подушке необходимо нажать на обе ножные педали 45 и передвинуть их во второе положение. Заслонки 27 всех движителей горизонтального перемещения 23 займут положение, показанное на фигурах 9 и 10. Воздух, выходящий из щелей движителей горизонтального перемещения 23 на правый и левый борта, не создает тяги, так как реактивные силы правого и левого бортов равны по величине и взаимно уравновешивают друг друга. Для поворота вправо на месте или в движении необходимо нажать на левую ножную педаль 45 и передвинуть ее во второе положение. Продольные 48, 49 и поперечная тяги посредством рычагов 52, 53 повернут заслонки 27 левого переднего и правого заднего движителей горизонтального перемещения 23 в положение, показанное на фигурах 9 и 10. При этом правая ножная педаль находится в исходном положении, а заслонки 27 двух других движителей горизонтального перемещения находятся в положении, показанном на фигуре 13. Возникающий реактивный момент от исходящего воздуха станет разворачивать корпус аппарата вправо, как показано на фигуре 17. Для поворота влево необходимо нажать на правую ножную педель 45, оставив левую ножную педаль в исходном положении. Продольные тяги 46, 47 через рычаги 50, 51 повернут заслонки 27 переднего правого и заднего левого движителей горизонтального перемещения 23 в положение, показанное на фигуре 10, а заслонки 27 двух других движителей горизонтального перемещения останутся в исходном положении, как показано на фигуре 13. Истекающий воздух создает реактивные силы, разворачивающие корпус аппарата влево, как показано на фигуре 18. Управление положением корпуса 1 при движении осуществляется передними и задними вертикальными соплами. Для того чтобы приподнять переднюю часть корпуса 1, необходимо передвинуть ручку управления 32 в положение “на себя”. Вал 33 повернется и повернет коленчатые рычаги 34, которые через продольные тяги 35 и рычаги 37 откроют один из клапанов 30 переднего левого сопла и переднего правого сопла. Воздух, истекая с большой скоростью из диффузоров 31, создаст реактивный момент в передней части аппарата и повернет корпус в направлении, показанном стрелкой на фигуре 19. Чтобы приподнять заднюю часть корпуса 1, необходимо ручку управления 32 передвинуть в положение “от себя”. При этом коленчатые рычаги 34 передвинут продольные тяги 35 в противоположную сторону и через рычаги 37 откроют один из клапанов 30 левого заднего сопла и правого заднего сопла. Истекающие струи сжатого воздуха создадут реактивный момент, который приподнимет заднюю часть корпуса, как показано на фигуре 20. Для наклона корпуса аппарата вправо необходимо ручку управления 32 повернуть вправо. Полукруглый сектор 38 нажмет на левый рычаг 39, который через рычаг 40, поперечную тягу 41, продольную тягу 43 и рычаги 44 откроет один из клапанов 30 левого переднего сопла и левого заднего сопла. Истекающий сжатый воздух из диффузоров 31 создаст реактивный момент, который приподнимет левую часть корпуса 1, осуществив крен на правую сторону (фиг.21). Для наклона корпуса аппарата влево необходимо повернуть ручку управления 32 влево. Полукруглый сектор 38 нажмет на правый рычаг 39, который через рычаг 40, правую поперечную тягу 41, рычаг 42, правую продольную тягу 43 и рычаги 44 откроет один из клапанов 30 правого переднего сопла и правого заднего сопла. Возникший реактивный момент в правой части корпуса приподнимет его и сделает крен влево (фиг.22).
После прибытия на место назначения аппарат на воздушной подушке останавливается. Опускается колесное посадочное шасси 9. Постепенно снижаются обороты двигателя 6. Подъемная сила и воздушный поток уменьшаются и аппарат приземляется.
Изобретение позволяет увеличить подъемную силу и грузоподъемность, повысить устойчивость и маневренность, подниматься на большую высоту над поверхностью дороги, преодолевать более высокие препятствия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С ДИНАМИЧЕСКИМ ПОДДЕРЖАНИЕМ КОРПУСА НАД ПОВЕРХНОСТЬЮ ДОРОГИ | 2011 |
|
RU2450953C1 |
| САМОЛЕТ В.С.ГРИГОРЧУКА | 1997 |
|
RU2123960C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2013 |
|
RU2538484C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2000 |
|
RU2190546C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2327582C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2006 |
|
RU2301750C1 |
| Аэродинамическое судно | 2016 |
|
RU2611676C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2011 |
|
RU2470808C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
Изобретение относится к аппаратам на воздушной подушке и касается создания дополнительной аэродинамической поддержки их корпусов. Аппарат на воздушной подушке с дополнительной аэродинамической поддержкой корпуса имеет корпус, кабину водителя, центральный воздухозаборник с направляющими лопатками, внутри которого размещен осевой нагнетатель воздуха, ресивер с обшивкой, двойные кольцевые каналы, соединенные с ресивером, двигатель, который через разобщительную муфту соединен с осевым нагнетателем воздуха, передние и задние движители горизонтального перемещения и передние и задние вертикальные сопла, пневматически соединенные с ресивером, колесное посадочное шасси, механизмы управления. Сверху на расстоянии от корпуса, на вертикальных стойках закреплена аэродинамическая платформа, выполненная в форме двух прямоугольных плит, изготовленных из легкого и прочного материала, наложенных симметрично друг на друга и соединенных между собой болтами. На верхней поверхности верхней плиты выполнены квадратные ячейки, расположенные рядами в продольном и поперечном направлениях. Каждая из них представляет собой воронкообразное углубление с двумя противоположными вертикальными плоскостями, между которыми расположены две противолежащие плоскости, наклоненные внутрь под углом друг к другу и имеющие в месте их соединения сквозной вертикальный щелевидный канал, по ширине равный ширине ячейки, на расстоянии от которого сверху прикреплена пластина. На верхней поверхности нижней плиты выполнены открытые сверху продольные каналы, пневматически соединенные между собой перемычками и с вертикальными щелевидными каналами ячеек верхней плиты, выходные концы которых соединены с центральным выходным отверстием, расположенным на нижней поверхности нижней плиты, которое соединено с центральным воздухозаборником. Механизмы управления аппаратом в пространстве кинематически связаны с передними и задними вертикальными соплами. Механизмы управления движением аппарата связаны с заслонками движителей горизонтального перемещения. Сверху на расстоянии от верхней прямоугольной плиты, на стойках закреплен настил для грузового контейнера. К нижней прямоугольной плите прикреплено гибкое ограждение. Изобретение позволяет увеличить подъемную силу и грузоподъемность, повысить проходимость за счет увеличения высоты над поверхностью дороги. 24 ил.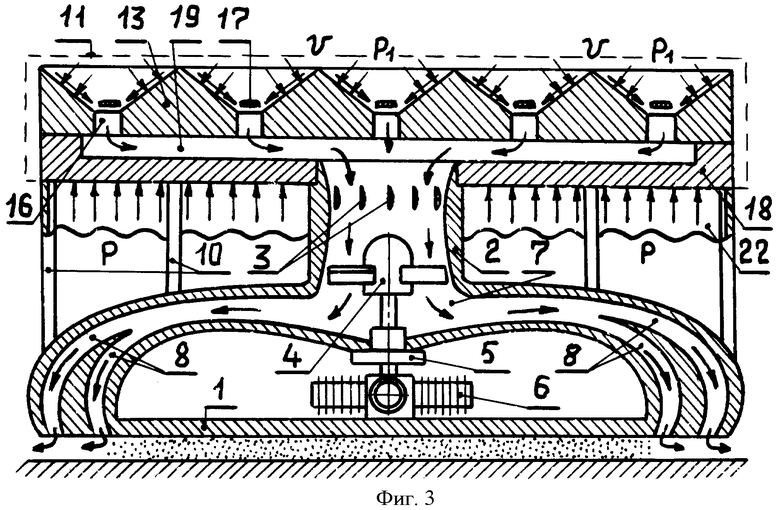
Аппарат на воздушной подушке с дополнительной аэродинамической поддержкой корпуса, содержащий корпус, кабину водителя, центральный воздухозаборник с направляющими лопатками, внутри которого размещен осевой нагнетатель воздуха, ресивер с обшивкой, двойные кольцевые каналы, соединенные с ресивером, двигатель, который через разобщительную муфту соединен с осевым нагнетателем воздуха, передние и задние движители горизонтального перемещения, пневматически соединенные с ресивером, передние и задние вертикальные сопла, также соединенные с ресивером, колесное посадочное шасси, механизмы управления, отличающийся тем, что сверху на некотором расстоянии от корпуса на вертикальных стойках закреплена аэродинамическая платформа, выполненная в форме двух прямоугольных плит, изготовленных из легкого и прочного материала, наложенных симметрично друг на друга и соединенных между собой болтами, причем на верхней поверхности верхней плиты выполнены квадратные ячейки, расположенные рядами в продольном и поперечном направлениях, каждая из которых представляет собой воронкообразное углубление с двумя противоположными вертикальными плоскостями, между которыми расположены две противолежащие плоскости, наклоненные внутрь под углом друг к другу и имеющие в месте их соединения сквозной вертикальный щелевидный канал, по ширине равный ширине ячейки, на некотором расстоянии от которого сверху прикреплена пластина, кроме того, на верхней поверхности нижней плиты выполнены открытые сверху продольные каналы, пневматически соединенные между собой перемычками и с вертикальными щелевидными каналами ячеек верхней плиты, выходные концы которых соединены с центральным выходным отверстием, расположенным на нижней поверхности нижней плиты, которое соединено с центральным воздухозаборником, кроме того, механизмы управления аппаратом в пространстве кинематически связаны с передними и задними вертикальными соплами, а механизмы управления движением аппарата связаны с заслонками движителей горизонтального перемещения, причем сверху на некотором расстоянии от верхней прямоугольной плиты на стойках закреплен настил для грузового контейнера, а к нижней прямоугольной плите прикреплено гибкое ограждение.
| ЕЖИ БЕНЬ | |||
| Модели и любительский суда на воздушной подушке | |||
| - Л.: СУДОСТРОЕНИЕ, 1983, с.5-7, рис 1 | |||
| Измеритель добротности катушек индуктивности | 1980 |
|
SU935825A1 |
| Быстроходное надводное судно | 1973 |
|
SU676153A3 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

