Область техники, к которой относится изобретение
Настоящее изобретение относится к технологиям связи и, в частности, касается способа и устройства для перехвата местоположения.
Уровень техники
Для защиты национальной и общественной безопасности и интересов согласно законодательству служба национальной безопасности должна обеспечить реализацию правомерного перехвата через сети связи общего назначения. В описательных целях здесь в дальнейшем вместо термина «правомерный перехват» употребляется просто «перехват». Система перехвата обычно состоит из центра перехвата и сетевых элементов. Сетевыми элементами являются устройства связи, предоставляющие услуги связи пользователям в сети связи (или сетевым устройствам), такие как программно- управляемый переключатель, сервер центра коммутации мобильной связи (сервер MSC) в сети мобильной связи с коммутацией каналов и шлюз (GW). Центр перехвата представляет собой объект, который принимает команды на перехват от службы национальной безопасности и принимает информацию, относящуюся к цели перехвата, которая сообщается сетевыми элементами.
Важной функцией перехвата является контроль текущего местоположения перехватываемой цели. При изменении местоположении перехватываемой цели сетевое устройство должно сообщить в центр перехвата информацию о текущем местоположении перехватываемой цели. В системе EPS (Усовершенствованная система пакетной передачи) принята концепция области слежения (TA) и предложен способ составления списка областей TA. Область TA является частью зоны действия радиосвязи. Когда система EPS распределяет страничные области для пользовательского оборудования (UE), которое является целью перехвата, система EPS может объединить одну или несколько соседних областей TA в список TA и послать этот список на перехватываемую цель. Текущая область TA перехватываемой цели включена в вновь распределенный список TA. Когда перехватываемая цель находится в режиме ожидания, обновление местоположения базируется на списке TA. Когда перехватываемая цель перемещается из области TA в списке TA в область TA вне списка TA (или когда истекло время таймера периодического обновления местоположения), перехватываемая цель инициирует процедуру обновления местоположения и уведомляет сеть о своем местоположении.
С известным уровнем техники связаны следующие недостатки.
Когда перехватываемая цель перемещается в пределах одной области TA или перемещается из одной области TA в списке TA в другую область ТА в этом же списке, перехватываемая цель не уведомляет сеть об изменении своего местоположения. В результате сеть EPS не имеет возможности получить более точную информацию о местоположении перехватываемой цели, а система перехвата не способна получить непрерывную траекторию движения перехватываемой цели или информацию о направлении, расстоянии и скорости движения перехватываемой цели.
Сущность изобретения
Варианты настоящего изобретения обеспечивают способ и устройство для перехвата местоположения, используя которые система перехвата может повысить точность определения местоположения перехватываемой цели в системе EPS.
Способ перехвата местоположения включает в себя:
получение первой информации о местоположении UE, выполняющего обновление местоположения, перед обновлением местоположения и второй информации о местоположении после обновления местоположения в системе EPS и сообщение первой информации о местоположении и второй информации о местоположении в центр перехвата.
Устройство получения информации о местоположении, применяемое в системе EPS, включает в себя:
блок получения информации о местоположении, сконфигурированный для получения первой информации о местоположении UE, выполняющего обновление местоположения, перед обновлением местоположения и второй информации о местоположении после обновления местоположения; и
блок сообщения, сконфигурированный для сообщения информации о местоположении, полученной блоком получения информации о местоположении, в центр перехвата.
Устройство приема информации о местоположении включает в себя:
блок приема информации о местоположении, сконфигурированный для получения первой информации о местоположении UE, выполняющего обновление местоположения, перед обновлением местоположения и второй информации о местоположении после обновления местоположения; и
блок обработки информации о местоположении, сконфигурированный для получения информации об обновлении местоположения UE согласно первой информации о местоположении UE перед обновлением местоположения и второй информации о местоположении после обновления местоположения, полученных блоком приема информации о местоположении.
В вариантах настоящего изобретения список ТА оборудования UE создается в соответствии с индикацией о точности определения местоположения при перехвате, так чтобы можно было установить точность определения местоположения перехватываемой цели и тем самым можно было получить более точную информацию о местоположении перехватываемой цели. Например, список ТА оборудования UE может включать в себя только одну область ТА, и тогда точность определения местоположения оборудования UE будет соответствовать отдельной области ТА. Благодаря получению первой информации о местоположении оборудования UE перед обновлением местоположения и второй информации о местоположении после обновления местоположения центр перехвата имеет информацию о направлении движения и расстоянии до перехватываемой цели, а также о траектории движения перехватываемой цели с точностью определения местоположения до одной области ТА, и кроме того, имеет информацию о скорости перемещения перехватываемой цели. Таким образом, варианты настоящего изобретения могут удовлетворять требованиям различных задач перехвата.
Краткое описание чертежей
Фиг.1 - блок-схема способа, обеспеченного в одном варианте настоящего изобретения;
фиг.2 - схема прикладной процедуры в одном варианте настоящего изобретения;
фиг.3 - блок-схема другого способа, обеспеченного в одном варианте настоящего изобретения;
фиг.4 - схема другой прикладной процедуры в одном варианте настоящего изобретения;
фиг.5 - схема процедуры, где центр перехвата посылает индикацию о точности перехвата цели в одном варианте настоящего изобретения;
фиг.6 - структура устройства получения информации о местоположении, обеспеченного в одном варианте настоящего изобретения;
фиг.7 - структура устройства приема информации о местоположении, обеспеченного в одном варианте настоящего изобретения;
фиг.8 - структура устройства управления определением местоположения, обеспеченного в одном варианте настоящего изобретения; и
фиг.9 - структура другого устройства приема информации о местоположении, обеспеченного в варианте настоящего изобретения.
Подробное описание изобретения
В вариантах настоящего изобретения обеспечен способ перехвата местоположения для получения более точной информации о местоположении перехватываемой цели в сети EPS. Способ включает в себя при выполнении оборудованием UE обновления местоположения получение первой информации о местоположении оборудования UE перед обновлением местоположения и второй информации о местоположении оборудования UE после обновления местоположения и сообщение первой информации о местоположении и второй информации о местоположении в центр перехвата. Таким образом, центр перехвата будет знать местоположение перехватываемой цели до и после ее перемещения и, кроме того, сможет определить непрерывную траекторию движения относительно областей ТА, а также направление, пройденное расстояние и скорость движения перехватываемой цели.
Для облегчения понимания настоящего изобретения его варианты подробно описываются далее со ссылками на сопроводительные чертежи.
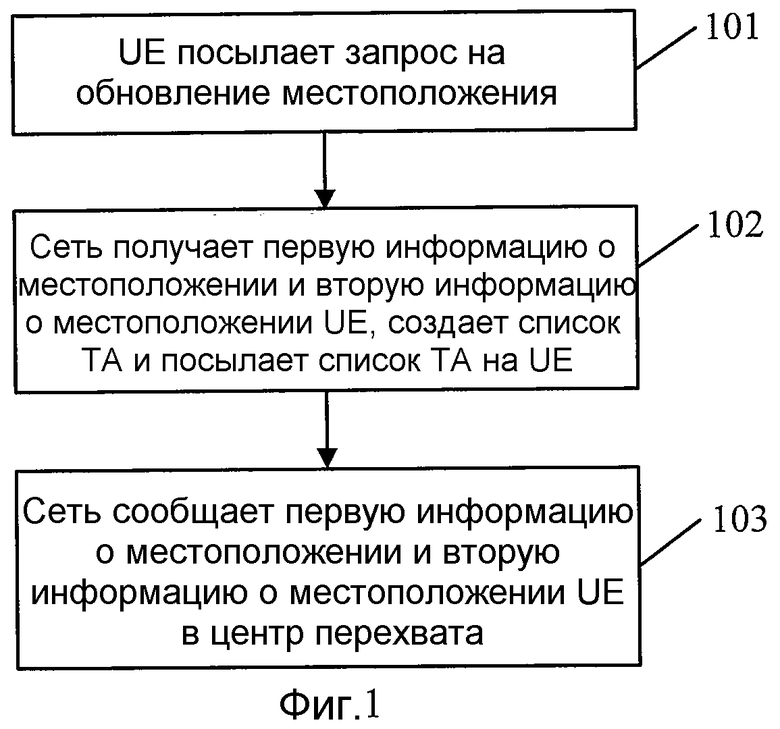
На фиг.1 представлена блок-схема способа, обеспеченного в одном варианте настоящего изобретения. Способ включает в себя следующие шаги.
Шаг 101. Оборудование UE посылает запрос на обновление местоположения. В частности, когда оборудование UE обнаруживает, что оно вошло в область слежения (ТА), не входящую в последний распределенный список областей ТА, оборудование UE посылает запрос на обновление местоположения. Предположим, что список ТА оборудования UE включает в себя 8 областей слежения (ТА1, ТА2, ТА3…, ТА8). Когда оборудование UE перемещается в пределах этих 8 областей ТА, оно не будет инициировать процедуру обновления местоположения (если не истекло время таймера периодического обновления местоположения). Однако когда оборудование UE перемещается из области ТА8 в область ТА9, то поскольку область ТА9 не включена в список ТА, оборудование UE инициирует обновление местоположения. Вдобавок если даже оборудование UE движется в рамках списка ТА или остается на месте, например его местоположением в последнем обновлении местоположения является область ТА2, и оно все еще находится в области ТА2, когда истекло время таймера периодического обновления местоположения, оборудование UE также инициирует обновление местоположения.
Шаг 102. Сеть принимает запрос на обновление местоположения оборудования UE и получает первую информацию о местоположении оборудования UE перед обновлением местоположения и вторую информацию о местоположении оборудования UE после обновления местоположения.
Когда оборудование UE посылает запрос на обновление местоположения после обнаружения того, что новая область ТА не включена в последний распределенный список ТА, первой информацией о местоположении будет идентификатор (ID) той области ТА, в которой находилось оборудование UE перед его перемещением, а второй информацией о местоположении будет ID той области ТА, в которой находится оборудование UE после перемещения.
Либо когда оборудование UE посылает периодический запрос на обновление сообщения при перемещении в областях ТА, входящих в последний распределенный список ТА, первой информацией о местоположении будет ID области ТА, где находилось оборудование UE перед перемещением, а второй информацией о местоположении будет ID той области ТА, где находится оборудование UE после перемещения.
Либо при посылке оборудованием UE периодического запроса на обновление местоположения при перемещении UE либо в случае, кода UE остается в области ТА, включенной в последний распределенный список ТА, первой информацией о местоположении и второй информацией о местоположении будет ID данной области ТА.
Когда сеть принимает запрос на обновление местоположения оборудования UE, она получает первую информацию о местоположении до обновления местоположения и вторую информацию о местоположении после обновления местоположения, выполняет обновление местоположения оборудования UE в соответствии с запросом на обновление местоположения, создает новый список ТА для данного оборудования UE и посылает этот новый список ТА на оборудование UE.
На практике первой информацией о местоположении может быть последняя посещенная область ТА, содержащаяся в запросе на обновление местоположения оборудования UE. Например, когда UE перемещается из области ТА8 в область ТА9, последней посещенной области ТА будет соответствовать ID области ТА8. Если оборудование UE находится в области ТА2, причем местом, где заканчивается время таймера периодического обновления местоположения, все еще является ТА2, то последней посещенной областью ТА будет соответствовать ID области ТА2. Второй информацией о местоположении может быть текущая область ТА для оборудования UE. Например, текущей областью ТА может быть ID соты, где находится оборудование UE, когда блок обработки сети принимает запрос на обновление местоположения оборудования UE. Если UE перемещается из области ТА8 в область ТА9, то текущей ТА будет ID области ТА9. Если UE не выходит из последней области ТА2 своего местоположения и все еще находится в области ТА2, когда истекло время таймера периодического обновления местоположения, текущей ТА будет ID области ТА2. В запросе на обновление местоположения оборудования UE может содержаться текущая область ТА.
Шаг 103. Сеть сообщает полученную первую информацию о местоположении и вторую информацию о местоположении оборудования UE в центр перехвата. Кроме того, сеть может сообщить в центр перехвата список ТА, распределенный в настоящее время оборудованию UE.
В вышеописанном варианте настоящего изобретения информация о местоположении до и после перемещения UE доставляется в центр перехвата посредством первой информации о местоположении перед обновлением местоположения и второй информации о местоположении после обновления местоположения, обеспечиваемого оборудованием UE. Центр перехвата может определить непрерывную траекторию движения относительно областей ТА, а также направление, расстояние и скорость движения перехватываемой цели в соответствии с информацией о местоположении, причем центр перехвата может определить, что диапазон перемещения перехватываемой цели до следующего обновления местоположения находится в границах нового списка ТА.
В известном уровне техники не определено, каким образом сеть EPS сообщает информацию о местоположении UE в центр перехвата. По сравнению с сетью GPRS (Система пакетной радиосвязи общего пользования) сеть EPS сообщает список областей ТА. Это означает, что в известном уровне техники основой является передача в центр перехвата списка ТА. Например, пусть список ТА для оборудования UE включает в себя 8 областей слежения (ТА1, ТА2, ТА3…, ТА8). Когда истекает время таймера периодического обновления местоположения, оборудование UE инициирует обновление местоположения. Предположим, что UE не перемещалось в течение этого периода и все время находилось в области ТА2. Согласно известному уровню техники информацией о местоположении, сообщаемой в центр перехвата, является список областей ТА, который включает в себя 8 областей слежения (ТА1, ТА2, ТА3…, ТА8). В данном варианте настоящего изобретения первой информацией о местоположении и второй информацией о местоположении, сообщаемой в центр перехвата, является в обоих случаях ТА2. По сравнению со списком ТА, обеспечиваемым в известном уровне техники, информация ТА2 о местоположении, обеспечиваемая в данном варианте настоящего изобретения, является более точной.
Кроме того, на практике при перемещении оборудования UE в пределах 8 областей ТА, входящих в список ТА, из области ТА2 в область ТА3 и из области ТА3 в область ТА4, если истекает время таймера периодического обновления местоположения, и оборудование UE инициирует обновление местоположения, то первой информацией о местоположении, сообщаемой в центр перехвата, будет ТА3, а второй информацией о местоположении будет ТА4 согласно данному варианту настоящего изобретения. В соответствии с информацией о местоположении в этих двух сообщениях центр перехвата может определить, что последним направлением движения оборудования UE является направление из области ТА2 в область ТА3, а затем в область ТА4. Однако в известном уровне техники информацией о местоположении, сообщаемой в центр перехвата, будет список ТА, который включает в себя 8 областей слежения (ТА1, ТА2, ТА3…, ТА8) и, следовательно, центр перехвата не сможет определить, перемещалось ли оборудование UE в течение данного периода.
Кроме того предположим, что оборудование UE опять начало перемещаться, например, из области ТА4 в область ТА9, и тогда поскольку область ТА9 не содержится в списке ТА, первой информацией о местоположении, сообщаемой в центр перехвата, будет ТА4, а второй информацией о местоположении будет ТА9 согласно данному варианту настоящего изобретения. В соответствии с информацией о местоположении в этих трех сообщениях центр перехвата сможет определить, что последним направлением движения оборудования UE было направление из области ТА2 в область ТА3, затем в область ТА4, а затем в область ТА9. В этом случае сеть также посылает новый список ТА для оборудования UE согласно данному варианту настоящего изобретения. Например, пусть новый список ТА также включает в себя 8 областей слежения (ТА4, ТА5, ТА6…, ТА11). Когда UE перемещается из области ТА4 в область ТА9, то информацией о местоположении, сообщаемой в центр перехвата, согласно известному уровню техники, будет новый список ТА, который включает в себя 8 областей слежения (ТА4, ТА5, ТА5…, ТА11). Следовательно, согласно известному уровню техники центр перехвата сможет лишь определить, что оборудование UE движется, но не сможет определить, каким путем двигалось оборудование UE в течение этого периода.
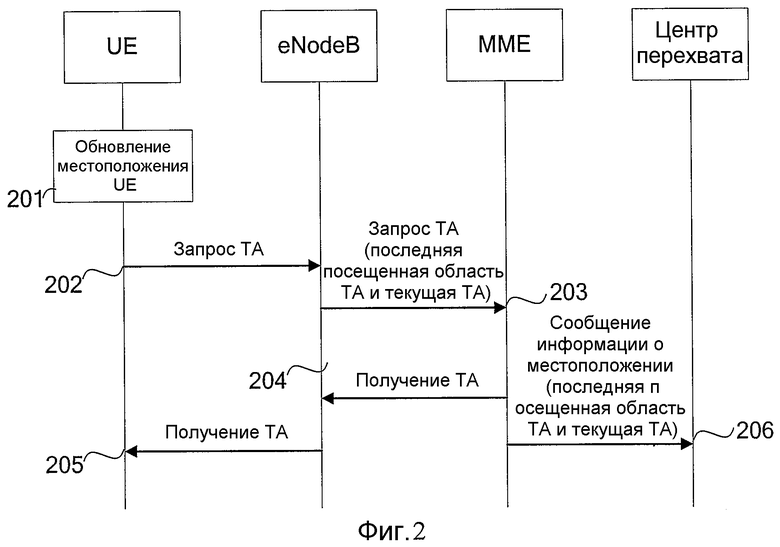
Далее со ссылками на фиг.2 описывается прикладная процедура в данном варианте настоящего изобретения. На фиг.2 оборудование UE представляет собой терминал; усовершенствованный узел NodeB (eNodeB) принимает информацию о UE и посылает информацию на UE; объект управления мобильностью (MME) получает информацию о местоположении оборудования UE до и после обновления местоположения и сообщает информацию о местоположении в центр перехвата.
Шаг 201. Оборудование UE обнаруживает, что вновь введенная область ТА отсутствует в последнем распределенном списке ТА, и инициирует обновление местоположения. На практике оборудование UE может инициировать обновление местоположения, когда истекает время таймера периодического обновления местоположения.
Шаг 202. Оборудование UE посылает в узел eNodeB запрос на обновление местоположения (запрос ТА), который содержит первую информацию о местоположения (последняя посещенная область ТА). В запросе может содержаться и вторая информация о местоположении.
Шаг 203. После приема запроса ТА, если узел eNodeB обнаруживает, что в запросе нет второй информации о местоположении, в качестве второй информации о местоположении (текущая область ТА) он рассматривает ID области (например, ID соты) того места, где принимается запрос на обновление местоположения, вставляет текущую область ТА в запрос ТА и посылает этот запрос в MME.
Шаг 204. Объект MME принимает запрос ТА, который содержит последнюю посещенную области ТА и текущую область ТА, выполняет обновление местоположения оборудования UE и посылает в узел eNodeB ответ с обновлением местоположения, указывающий получение запроса ТА (получение ТА). Сообщение о получении ТА содержит список ТА, созданный для данного оборудования UE.
Шаг 205. Узел eNodeB направляет принятое сообщение о получении ТА на UE.
Шаг 206. Объект MME передает сообщение, содержащее последнюю посещенную область ТА, текущую область ТА и новый список ТА в центр перехвата. Центр перехвата может определить непрерывную траекторию движения относительно областей ТА, а также направление, расстояние и скорость движения перехватываемой цели в соответствии с полученной информацией о местоположении, причем центр перехвата будет знать, что диапазон перемещения перехватываемой цели до следующего обновления местоположения укладывается в новый список ТА. Таким образом, данный вариант настоящего изобретения применим к процессам получения траектории движения оборудования UE в конкретных сценариях обслуживания, таких как захват.
Следует заметить, что во второй информации о местоположении после обновления местоположения в данном варианте настоящего изобретения словосочетание «после обновления местоположения» означает лишь модификатор второй информации о местоположении, но не ограничитель времени получения второй информации о местоположения. Вторую информацию о местоположении можно получить во время обновления местоположения. Например, объект MME может сообщить в центр перехвата информацию о местоположении перед шагом 204 или сделать это после шага 204. Это означает, что после получения объектом MME информации о местоположении он может послать информацию о местоположении оборудования UE в центр перехвата до ответа на запрос ТА.
Один вариант настоящего изобретения обеспечивает другой способ перехвата местоположения. В этом варианте сеть создает список ТА для оборудования UE в соответствии с индикацией о точности перехвата, которая устанавливает список областей ТА, посылает этот список в UE и получает информацию о местоположении оборудования UE, когда UE выполняет обновление местоположения в соответствии со списком ТА, и сообщает информацию о местоположении в центр перехвата.
В частности, после приема запроса на обновление местоположения от оборудования UE сеть создает список ТА для данного UE согласно индикации о точности перехвата.
Для облегчения понимания настоящего изобретения далее со ссылками на сопроводительный чертеж описывается реализация способа, обеспеченного в данном варианте настоящего изобретения.
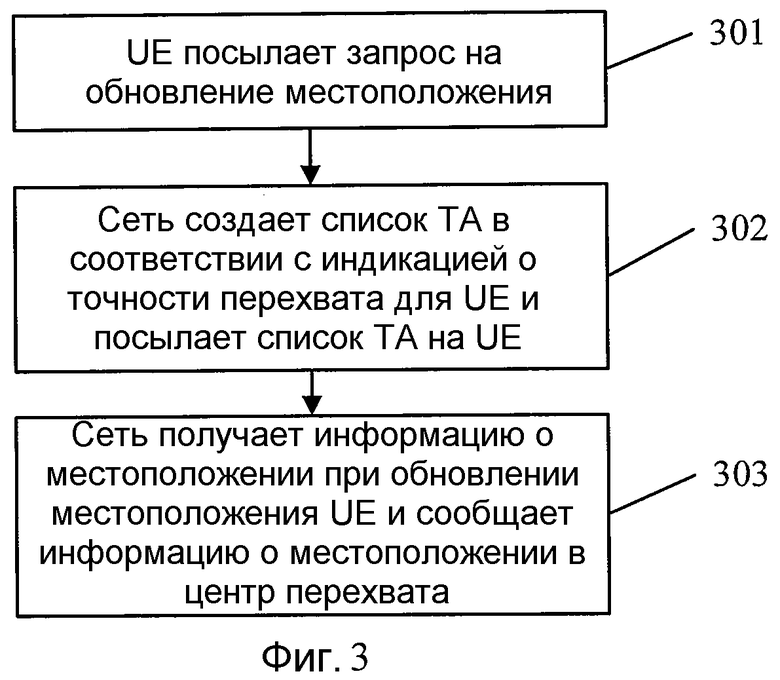
На фиг.3 показана процедура еще одного способа в варианте настоящего изобретения. Процедура включает в себя следующие шаги.
Шаг 301. Оборудование UE обнаруживает, что в последнем распределенном списке ТА нет вновь введенной области ТА, и посылает запрос на обновление местоположения. На практике оборудование UE может инициировать обновление местоположения по истечении времени таймера периодического обновления местоположения.
Шаг 302. После приема запроса на обновление местоположения сеть создает список ТА для данного UE в соответствии с индикацией о точности перехвата и посылает этот список ТА на UE. На практике сеть может создать список ТА для оборудования UE, когда инициируется перераспределение идентификационной информации UE после получения индикации о точности перехвата. Индикация о точности перехвата включает в себя по меньшей мере одно из следующего: информацию о перехватываемой цели (UE), информацию об уровне перехвата UE и информацию о точности определения местоположения перехватываемой цели (UE). Например, информация о перехватываемой цели (UE) может указывать, является ли данное UE перехватываемой целью; информация об уровне перехвата UE может указывать, запрашивается ли информация о местоположении с высокой точностью или с обычной точностью; информация о точности определения местоположения при перехвате UE указывает требуемую точность информации о местоположении; например, если требование к точности в этой информации составляет 1 км, то точность сообщаемой информации о местоположении UE будет находиться в пределах 1 км.
Шаг 303. Когда оборудование UE инициирует обновление местоположения (включая периодическое обновление местоположения) согласно списку ТА, посланному на шаге 302, сеть получает информацию о местоположении оборудования UE во время обновления местоположения, в том числе получает первую информацию о местоположении перед обновлением местоположения, а вторую информацию о местоположении после обновления местоположения, либо сеть получает только вторую информацию о местоположении оборудования UE после обновления местоположения и сообщает полученную информацию о местоположении в центр перехвата; затем сеть создает новый список ТА и посылает этот новый список ТА на UE. Пусть, например, список ТА, распределенный для данного UE на шаге 302, включает в себя только области ТА1 и ТА2. Когда сеть принимает запрос об обновлении местоположения, посланный оборудованием UE, при перемещении оборудования UE из области ТА2 в область ТА3 и обнаруживает, что области ТА3 в списке ТА отсутствует, сеть выполняет соответствующую процедуру обновления местоположения и получает первую информацию о местоположении (последней посещенной областью ТА будет ТА2) перед обновлением местоположения, и вторую информацию о местоположении (текущей областью ТА будет ТА3) после обновления местоположения UE и сообщает первую информацию о местоположении, вторую информацию о местоположении и новый список ТА для данного UE в центр перехвата.
В вышеописанной процедуре по данному способу сеть создает список ТА для оборудования UE в соответствии с индикацией о точности определения местоположения перехватываемой цели и тем самым может установить точность определения местоположения перехватываемой цели и обеспечить более точную информацию о местоположении перехватываемой цели. Например, если в списке ТА установлена одна область ТА, то точность определения местоположения UE определяется отдельной областью ТА. На практике сеть может получить только вторую информацию о местоположении UE после обновления местоположения при получении информации о местоположении UE во время обновления местоположения, после чего сеть сообщает вторую информацию о местоположении в центр перехвата. Данный вариант реализации аналогичен вышеописанному и поэтому далее не описывается.
Ниже со ссылками на фиг.4 описывается еще одна прикладная процедура согласно данному варианту настоящего изобретения. Как показано на фиг.4, эта процедура включает в себя следующие шаги.
Шаг 400. Оборудование UE обнаруживает, что в его списке ТА нет текущей области ТА, и инициирует обновление местоположения. На практике оборудование UE может инициировать обновление местоположения по истечении времени таймера периодического обновления местоположения.
Шаг 401. Оборудование UE посылает запрос ТА в промежуточный узел eNodeB.
Шаг 402. Узел eNodeB принимает запрос ТА и направляет его в сетевой объект MME.
Шаг 403. После приема запроса ТА объект MME создает список ТА в соответствии с индикацией о точности перехвата оборудования UE. На практике индикация о точности перехвата UE может храниться в MME или может быть незамедлительно получена объектом MME. MME может получить индикацию о точности перехвата, используя следующие подходы:
взаимодействуя с домашним абонентским сервером (HSS), в котором хранится индикация о точности перехвата UE, для получения индикации о точности перехвата UE; или
взаимодействуя с центром перехвата для получения индикации о точности перехвата UE; или
получая индикацию о точности перехвата UE, предварительно сконфигурированную в локальных данных, которая может храниться в локальных данных, после того как MME получил индикацию о точности перехвата UE от сервера HSS или центра перехвата, и которую получают из локальных данных при запросе индикации о точности перехвата UE.
Кроме того, после получения индикации о точности перехвата, когда объект MME создает для оборудования UE список ТА в соответствии с индикацией о точности перехвата, MME выполняет по меньшей мере одно из описанных ниже действий по обработке.
В соответствии с информацией о перехватываемой цели (UE), если данное оборудование UE является целью перехвата, то MME создает список ТА по меньшей мере из одной области ТА, которая включает в себя текущую область ТА для данного UE; если данное оборудование UE не является целью перехвата, то объект MME может создать список ТА для данного UE в соответствии с его текущей ТА и окружающими ее областями. Например, если UE является целью перехвата, то MME создает список ТА, который включает в себя только текущую область ТА для данного UE; если UE не является целью перехвата, то MME создает для него список ТА в обычном режиме, например, помещая в один список ТА 10 соседних областей ТА.
В соответствии с информацией об уровне перехвата UE объект MME может выбрать несколько областей ТА, соответствующих уровню перехвата, и создать список ТА согласно выбранному количеству областей ТА, текущей области ТА для данного UE и окружающим ее областям. Например, если уровень перехвата UE высокий, то MME создает список ТА, включающий в себя только текущую область ТА для данного UE; если уровень перехвата UE средний, то MME создает список ТА, включающий в себя 3 области ТА для данного UE. Если уровень перехвата UE низкий, то MME создает список ТА, включающий в себя 6 областей ТА для данного UE.
Согласно информации о точности определения местоположения перехватываемого UE объект MME может выбрать несколько областей ТА, соответствующих точности определения местоположения перехватываемой цели и создать список ТА для данного UE согласно выбранному количеству и в соответствии с текущей областью ТА данного UE и окружающих ее областей ТА. Например, в соответствии с конфигурацией и планированием областей ТА объект MME создает для UE с заданной точностью перехвата менее 500 м список ТА, который включает в себя только текущую область ТА данного UE; если точность перехвата находится в диапазоне от 500 м до 1 км, то MME создает список ТА, включающий в себя текущую область ТА данного UE и 6 соседних областей ТА, то есть всего 7 областей ТА.
Предположим, что список ТА, созданный объектом MME для данного UE на описываемом шаге, включает в себя 3 области ТА (ТА8, ТА9 и ТА10).
Вдобавок, к созданию списка ТА для оборудования UE в соответствии с индикацией о точности перехвата, после приема запроса ТА оборудования UE объект MME может создать список ТА для данного UE в соответствии с индикацией о точности перехвата при инициировании процедуры переаспределения идентификационной информации для UE, такой как процедура перераспределения глобальной уникальной временной идентификационной информации (GUTI).
Шаг 404. Объект MME выполняет обновление местоположения UE и посылает сообщение о получении ТА в узел eNodeB. Сообщение о получении ТА содержит список ТА, созданный на шаге 403.
Если на шаге 403 объект MME создает список ТА для оборудования UE в соответствии с индикацией о точности перехвата при инициировании процедуры перераспределения GUTI, объект MME может послать команду перераспределения GUTI на узел eNodeB. В команде перераспределения GUTI содержится список ТА, созданный на шаге 403.
Шаг 405. Узел eNodeB направляет принятое сообщение о получении ТА или команду перераспределения GUTI на UE.
Шаг 406. После приема списка ТА, включающего в себя 3 области ТА (ТА8, ТА9 и ТА10), оборудование UE перемещается в область ТА11 и инициирует еще одну процедуру обновления местоположения. Следует заметить, что при перемещении UE в областях ТА8, ТА9 и ТА10 оборудование UE не будет инициировать обновление местоположения. Однако при перемещении UE внутри этих 3-х областей ТА и по истечении времени таймера периодического обновления местоположения, хотя UE все еще находится в области ТА, входящей в список ТА (например, последнее перемещение из области ТА9 в область ТА10), оборудование UE инициирует обновление местоположения; при этом даже если оборудование UE не перемещается (например, во время последнего обновления местоположения UE находился в области ТА9 и продолжает находиться там, когда истекло время таймера периодического обновления местоположения), UE также инициирует процедуру обновления местоположения.
Шаг 407. Оборудование UE посылает запрос ТА на узел eNodeB. Запрос ТА может содержать первую информацию о местоположении (первая посещенная область ТА) и вторую информацию о местоположении после обновления местоположения UE (текущая область ТА) или содержать только последнюю посещенную область ТА. Например, если UE перемещается из области ТА10 в область ТА11, то последней посещенной областью ТА будет область ТА10, а текущей областью ТА будет область ТА11. Если при инициировании последнего обновления местоположения оборудование UE находится в области ТА9 и остается в этой области, когда истекло время таймера периодического обновления местоположения, то последней посещенной областью ТА будет область ТА9.
Шаг 408. Когда узел eNodeB направляет в MME запрос ТА, то если запрос ТА не содержит текущую область ТА, узел eNodeB вставит в запрос ТА эту текущую область. Например, когда оборудование UE перемещается из области ТА9 в область ТА8, текущей областью ТА является область ТА8; если местоположением UE при последнем инициировании обновления местоположения является область ТА9, и оборудование UE продолжает находиться в области ТА9 по истечении времени таймера периодического обновления местоположения, то текущей областью ТА станет область ТА9.
Шаг 409. После приема запроса ТА объект MME выполняет обновление местоположения UE и посылает сообщение о получении ТА в узел eNodeB. Сообщение о получении ТА содержит новый список ТА, созданный для данного UE (в список ТА также включена текущая область ТА данного UE).
Шаг 410. Узел eNodeB направляет на UE сообщение о получении ТА (смотри шаг 409).
Шаг 411. Объект MME получает первую информацию о местоположении и вторую информацию о местоположении UE и сообщает в центр перехвата информацию о местоположении. Кроме того, блок получения информации о местоположении может передать в центр перехвата список ТА, распределенный в настоящее время для данного оборудования UE. Следует заметить, что шаг 411 может выполняться до или после шага 409.
В течение всей вышеописанной прикладной процедуры объект MME может определить, является ли данное оборудование UE целью перехвата, в соответствии с информацией о перехватываемой цели, и определить, следует ли обеспечить определение местоположения UE с высокой точностью или с обычной точностью, в соответствии с информацией об уровне перехвата UE; в соответствии с информацией о точности определения местоположения перехватываемого UE можно установить точность определения местоположения UE в конкретном диапазоне. Например, если требуемая точность составляет 1 км, то точность информации о местоположении UE не должна превышать 1 км. Следовательно, можно обеспечить более точную информацию о местоположении перехватываемой цели.
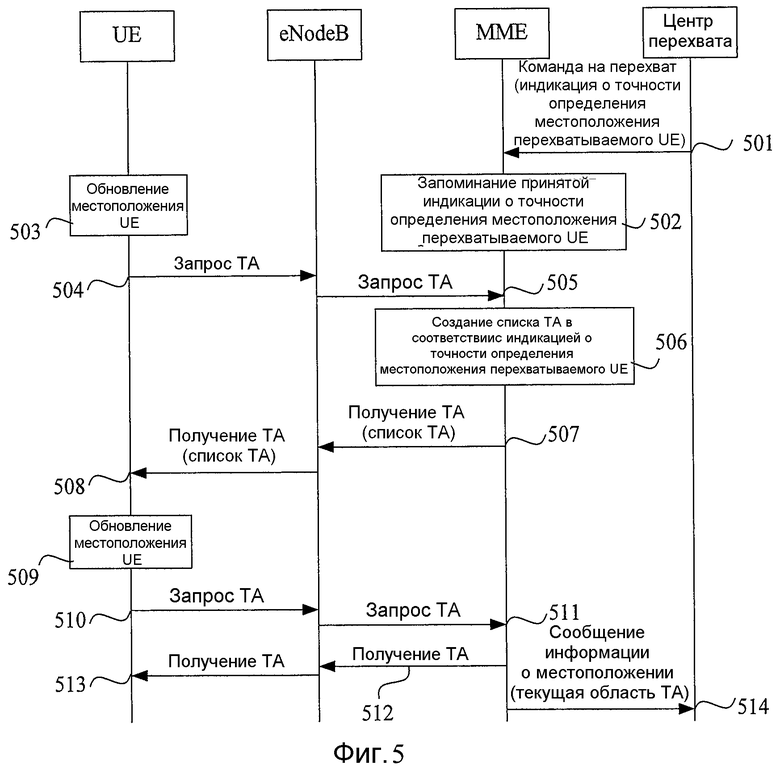
На фиг.5 показана процедура, в которой центр перехвата посылает указание о точности обнаружения перехватываемой цели в одном варианте настоящего изобретения. Эта процедура включает в себя следующие шаги.
Шаг 501. Когда центру перехвата необходимо перехватить UE, он посылает на MME команду перехвата. Команда перехвата содержит индикацию о точности обнаружения местоположения перехватываемой цели. Индикация о точности определения местоположения перехватываемой цели может включать в себя информацию о перехватываемой цели (UE), информацию об уровне перехвата UE и информацию о точности определения местоположения перехватываемого UE. Команда перехвата может не содержать какую-либо дополнительную информацию, но она неявным образом содержит индикацию о точности определения местоположения перехватываемой цели, указывающую что данное UE должно быть перехвачено и что объект MME должен обеспечить информацию о стандартной точности определения местоположения UE.
Шаг 502. Объект MME принимает команду перехвата и запоминает информацию, содержащуюся в команде перехвата.
Шаг 503. Оборудование UE обнаруживает, что в списке ТА отсутствует текущая область ТА, и инициирует обновление местоположения или периодическое обновление местоположения.
Шаги 504-514 совпадают с аналогичными шагами процедуры, показанной на фиг.4, и поэтому здесь опущены.
В вышеописанной процедуре объект MME создает для UE список ТА в соответствии с индикацией о точности определения местоположения при перехвате. Таким образом, может быть установлена точность определения местоположения при перехвате цели. На практике, поскольку нет необходимости осуществлять постоянный мониторинг всех перехватываемых целей с высокой точностью определения местоположения, центр перехвата может посылать разные указания о точности перехвата для разных UE (пользователей). При перехвате обычного пользователя центру перехвата необходимо знать лишь примерное местоположение оборудования UE, и тогда центр перехвата в посылаемой индикации о точности определения местоположения перехватываемой цели может указать низкий уровень перехвата UE. В случае розыска преступника центр перехвата должен очень точно знать местоположение пользователя, и в посланной индикации о точности определения местоположения при перехвате центр перехвата может указать высокий уровень перехвата UE.
На практике данный способ может быть использован в сетях любого типа, включая EPS. Вариант настоящего изобретения обеспечивает устройство получения информации о местоположении, которое можно применить в сети EPS, поместив его, например, в объект MME. Структура устройства показана на фиг.6 и включает в себя приемный блок 61, блок 62 получения информации о местоположении и блок 63 сообщения.
Приемный блок 61 сконфигурирован для приема запроса на обновление местоположения UE.
Блок 62 получения информации о местоположении сконфигурирован для получения первой информации о местоположении UE до обновления местоположения и второй информации о местоположении после обновления местоположения и посылки полученной информации о местоположении в блок 63 сообщения. Например, после того как приемный блок 61 принял запрос на обновление местоположения UE, блок 62 получения информации о местоположении получает первую информацию о местоположении и вторую информацию о местоположении, содержащиеся в запросе на обновление местоположения; причем блок 62 получения информации о местоположении дополнительно сконфигурирован для выполнения процедуры обновления местоположения UE согласно запросу на обновление местоположения UE, создания списка ТА для данного UE и посылки списка ТА в блок 63 сообщения.
Блок 63 сообщения сконфигурирован для сообщения первой информации о местоположении и второй информации о местоположении, полученными блоком 62 получения информации о местоположении, а также списка ТА, созданного для данного UE, в центр перехвата.
Устройство получения информации о местоположении может получить информацию о положении до и после перемещения оборудования UE и послать информацию о местоположении в центр перехвата, а центр перехвата может определить непрерывную траекторию движения относительно областей ТА, а также направление, расстояние и скорость движения перехватываемой цели в соответствии с информацией о местоположении. Центр перехвата также знает, что диапазон перемещения перехватываемой цели перед следующим обновлением местоположения находится в рамках нового списка ТА. Таким образом, повышается точность определения местоположения перехватываемой цели.
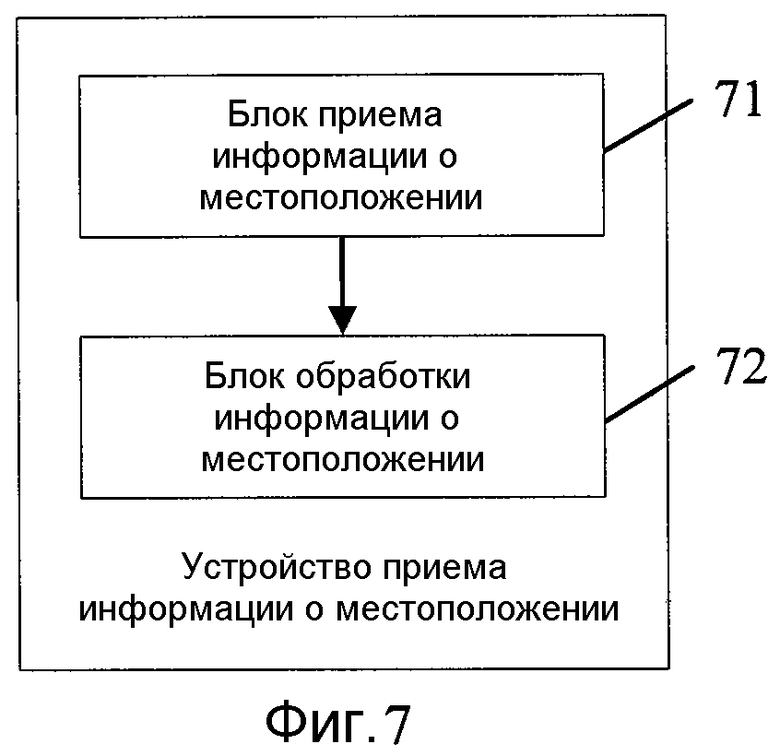
Один вариант настоящего изобретения обеспечивает устройство приема информации о местоположении, которое можно применить, например, в сети EPS. На практике это устройство можно разместить в центре перехвата. Структура устройства приема информации о местоположении показана на фиг.7 и включает в себя блок 71 приема информации о местоположении и блок 72 обработки информации о местоположении.
Блок 71 приема информации о местоположении сконфигурирован для получения первой информации о местоположении UE перед обновлением местоположения и второй информации о местоположении после обновления местоположения, например приема информации о местоположении UE перед и после обновления местоположения сообщенного объектом MME, а также приема нового списка ТА для данного UE.
Блок 72 обработки информации о местоположении сконфигурирован для получения информации об обновлении местоположения UE в соответствии с первой информацией о местоположении UE перед обновлением местоположения и второй информацией о местоположении после обновления местоположения, полученной блоком 71 приема информации о местоположении. Информация об обновлении местоположения может включать в себя непрерывную траекторию движения относительно областей ТА, а также направление, расстояние и скорость движения UE. Например, блок 72 обработки информации о местоположении определяет непрерывную траекторию движения относительно областей ТА, а также направление, расстояние и скорость движения UE в соответствии с принятой информацией о местоположении.
Один вариант настоящего изобретения обеспечивает устройство управления определением местоположения, которое может быть размещено в MME. Структура этого устройства, показанного на фиг.8, включает в себя блок 81 получения индикации о точности, блок 82 формирования списка, блок 83 получения информации о местоположении и блок 84 сообщения.
Блок 81 получения индикации о точности сконфигурирован для получения индикации о точности перехвата и посылки индикации о точности перехвата в блок 82 формирования списка. В частности, блок 81 получения индикации о точности взаимодействует с сервером HSS, который запоминает индикацию о точности перехвата UE, для получения индикации о точности перехвата UE; или взаимодействует с центром перехвата для получения индикации о точности перехвата UE; или получает индикацию о точности перехвата UE, предварительно сконфигурированную в локальных данных, включая запоминание индикации о точности перехвата UE, полученную от сервера HSS или центра перехвата, в локальных данных и получение индикации о точности перехвата из локальных данных при запросе индикации о точности перехвата UE.
Блок 82 формирования списка сконфигурирован для создания списка ТА для данного UE в соответствии с индикацией о точности перехвата, полученной блоком 81 получения индикации о точности, и посылает список ТА на UE. Например, блок 82 формирования списка может создать список ТА для данного UE в соответствии с индикацией о точности перехвата при инициировании процедуры перераспределения идентификаторов UE или после приема от UE запроса на обновление местоположения.
Блок 83 получения информации о местоположении сконфигурирован для получения информации о местоположении UE, когда UE выполняет обновление местоположения в соответствии со списком ТА, включая получение первой информации о местоположении (последняя посещенная область ТА) оборудования UE перед обновлением местоположения и второй информации о местоположении (текущая область ТА) после обновления местоположения и сообщение полученной информации о местоположении в блок 84 сообщения. Например, после приема запроса на обновление местоположения, посланного оборудованием UE, когда оно обнаруживает вновь введенную область ТА, не вошедшую в последний распределенный список ТА, если запрос на обновление местоположения содержит первую информацию о местоположении и вторую информацию о местоположении, то блок 83 получения информации о местоположении получает первую информацию о местоположении и вторую информацию о местоположении; если запрос на обновление местоположения содержит первую информацию о местоположении, но не содержит вторую информацию о местоположении, то блок 83 получения информации о местоположении рассматривает ID области, где принимается запрос на обновление местоположения, в качестве второй информации о местоположении и получает первую информацию о местоположении и вторую информацию о местоположении.
Блок 84 сообщения сконфигурирован для сообщения информации о местоположении, полученной блоком 83 получения информации о местоположении, и списка ТА, созданного блоком 82 формирования списка, в центр перехвата.
На практике вышеупомянутое устройство управления определением местоположения может повысить точность определения местоположения перехватываемой цели. Например, при приеме от UE запроса на обновление местоположения блок 83 получения информации о местоположении предоставляет блоку 82 формирования списка информацию о местоположении, и тогда блок 82 формирования списка может создать список ТА для UE в соответствии с индикацией о точности перехвата UE, полученной блоком 81 получения индикации о точности, и послать список ТА на UE. Когда оборудование UE обнаружит, что вновь введенная область ТА отсутствует в списке ТА, оборудование UE инициирует обновление местоположения, а блок 83 получения информации о местоположении получает первую информацию о местоположении (последняя посещенная область ТА) перед обновлением текущего местоположения и вторую информацию о местоположении (текущая область ТА) и сообщает полученную информацию и список ТА для данного UE в блок 84 сообщения. Блок 84 сообщения сообщает эту информацию и список ТА в центр перехвата.
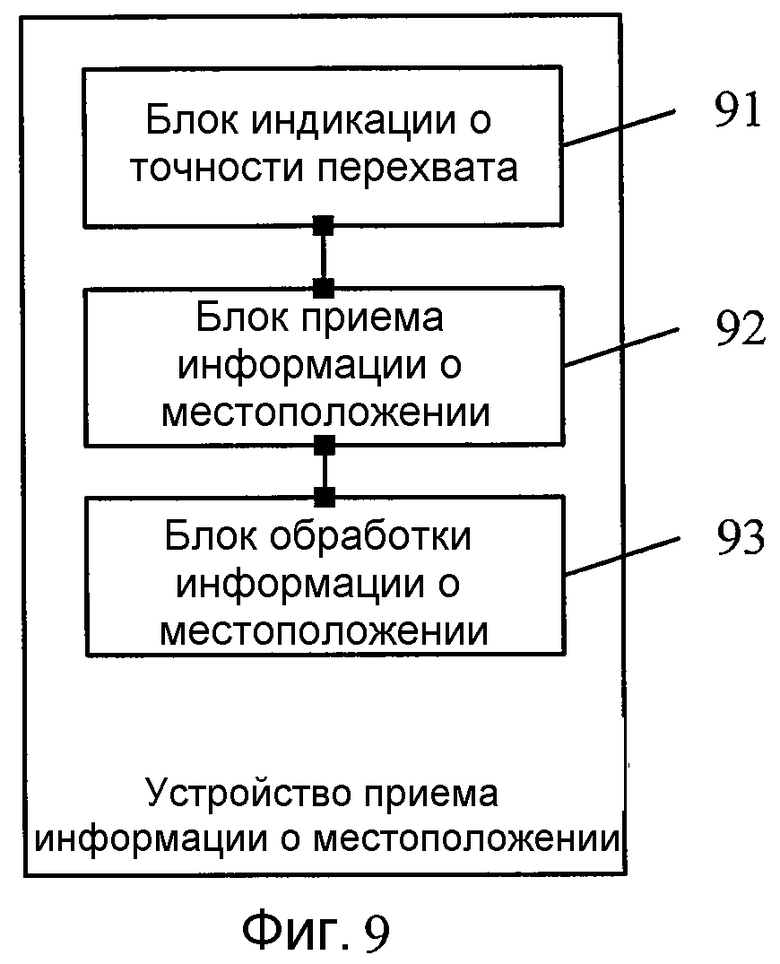
Один вариант настоящего изобретения обеспечивает другое устройство приема информации о местоположении, которое можно размесить в центре перехвата. Структура этого устройства, показанная на фиг.9, включает в себя блок 91 индикации точности перехвата, блок 92 приема информации о местоположении и блок 93 обработки информации о местоположении.
Блок 91 индикации точности перехвата сконфигурирован для посылки индикации о точности перехвата для создания списка ТА оборудования UE в соответствии с требование точности перехвата. Индикация о точности определения местоположения при перехвате может включать в себя информацию о перехватываемой цели (UE), информацию об уровне перехвата UE и информацию о точности определения местоположения при перехвате UE.
Блок 92 приема информации о местоположении сконфигурирован для получения информации о местоположении оборудования UE, когда оно выполняет обновление местоположения в соответствии со списком ТА, например, для получения первой информации о местоположении (последняя посещенная область ТА) перед обновлением местоположения и второй информации о местоположении (текущая область ТА) после обновления местоположения.
Блок 93 обработки информации о местоположении сконфигурирован для получения информации об обновлении местоположения UE в соответствии с информацией о местоположении, полученной блоком 92 приема информации о местоположении, когда оборудование UE выполняет обновление местоположения; информация об обновлении местоположения может включать в себя направление, траекторию, расстояние и скорость движения UE. Например, блок 93 обработки информации о местоположении вычисляет траекторию, расстояние и скорость движения UE в соответствии с полученной информацией о местоположении до и после обновления местоположения.
На практике при использовании устройства приема информации о местоположении можно получить направление, расстояние и скорость движения перехватываемой цели, а точность перехвата можно установить гибким образом в соответствии с требуемой точностью перехвата для повышения точности определения местоположения перехватываемой цели.
Суммируя вышесказанное, можно сказать, что в описанных вариантах настоящего изобретения по сравнению с известным уровнем техники список ТА для оборудования UE создается в соответствии с индикацией о точности определения местоположения при перехвате, так что можно установить точность определения местоположения перехватываемой цели и получить тем самым более точную информацию о местоположении перехватываемой цели. Например, список ТА для оборудования UE может включать в себя только одну область ТА, и тогда точность определения местоположения UE определяется отдельной областью ТА. Благодаря получению первой информации о местоположении до обновления местоположения и второй информации о местоположении после обновления местоположения центр перехвата получает представление о направлении движения и расстоянии до перехватываемой цели и, кроме того, о траектории и скорости движения перехватываемой цели. Таким образом, описанные варианты настоящего изобретения могут удовлетворять требованиям различных задач перехвата.
Хотя настоящее изобретение было описано через примерные варианты его осуществления, изобретение не ограничивается указанными вариантами. Очевидно, что специалисты в данной области техники смогут предложить различные модификации и варианты изобретения, не выходящие за рамки существа и объема настоящего изобретения. Предполагается, что изобретение охватывает упомянутые модификации и варианты при условии, что они не выходят за рамки объема охраны, определенного пунктами формулы изобретения или ее эквивалентами.


Настоящее изобретение относится к способу и устройству для перехвата местоположения. Способ включает в себя создание списка областей слежения (ТА) для пользовательского оборудования (UE) в соответствии с индикацией о точности перехвата и посылки списка ТА на UE; и получение информации о местоположении UE, когда UE выполняет обновление местоположения в соответствии со списком ТА и сообщение информации о местоположении в центр перехвата. Технический результат настоящего изобретения заключается в точности определения местоположения перехватываемой цели, с тем чтобы можно было получить более точную информацию о местоположении перехватываемой цели, и обеспечить тем самым удовлетворение требований различных задач перехвата. 3 н. и 3 з.п. ф-лы, 9 ил.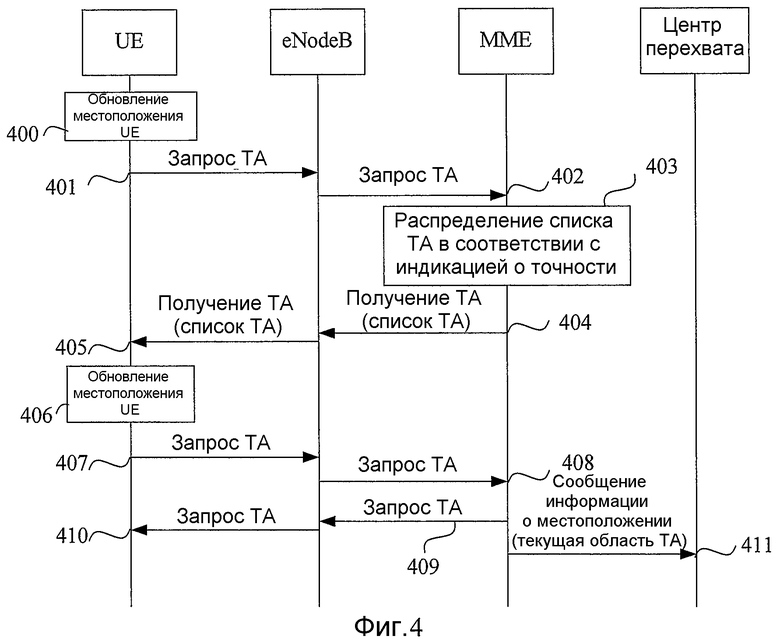
1. Способ перехвата местоположения, содержащий:
получение объектом управления мобильностью (ММЕ) первой информации о местоположении пользовательского оборудования (UE), выполняющего обновление местоположения, перед обновлением местоположения и второй информации о местоположении после обновления местоположения в усовершенствованной системе пакетной передачи (EPS); и
сообщение объектом управления мобильностью (ММЕ) о первой информации о местоположении и второй информации о местоположении в центр перехвата.
2. Способ по п.1, в котором:
когда UE посылает запрос на обновление местоположения после обнаружения того, что вновь введенная область слежения (ТА) отсутствует в последнем распределенном списке ТА, первой информацией о местоположении будет ID области ТА, где находилось UE перед его перемещением, а второй информацией о местоположении будет ID области ТА, где находится UE после перемещения; или
когда UE посылает периодический запрос на обновление местоположения при перемещении в областях ТА, входящих в последний распределенный список ТА, первой информацией о местоположении будет ID области ТА, где находилось UE перед его перемещением, а второй информацией о местоположении будет ID области ТА, где находится UE после перемещения; или
когда UE посылает периодический запрос на обновление местоположения, в то время когда UE перемещается или находится в области ТА из последнего распределенного списка ТА, первой информацией о местоположении и второй информацией о местоположении будет ID указанной ТА.
3. Способ по п.1,
содержащий также:
прием запроса на обновление местоположения UE; при этом
этап получения первой информации о местоположении UE, выполняющего обновление местоположения, до обновления местоположения и второй информации о местоположении после обновления местоположения содержит:
получение первой информации о местоположении перед обновлением местоположения и второй информации о местоположении после обновления местоположения, содержащихся в запросе на обновление местоположения, принятом от UE.
4. Устройство получения информации о местоположении, применяемое в усовершенствованной системе пакетной передачи (EPS), содержащее:
блок получения информации о местоположении, сконфигурированный для получения первой информации о местоположении пользовательского оборудования (UE), выполняющего обновление местоположения перед обновлением местоположения, и второй информации о местоположении после обновления местоположения; и
блок сообщения, сконфигурированный для сообщения первой информации о местоположении и второй информации о местоположении, полученных блоком получения информации о местоположении, в центр перехвата.
5. Устройство по п.4, содержащее также:
приемный блок, сконфигурированный для приема запроса на обновление местоположения UE; и
блок получения информации о местоположении, сконфигурированный для получения первой информации о местоположении и второй информации о местоположении, содержащихся в запросе на обновление местоположения, после того как приемный блок принял запрос на обновление местоположения UE.
6. Устройство приема информации о местоположении, содержащее:
блок приема информации о местоположении, сконфигурированный для получения первой информации о местоположении пользовательского оборудования (UE), выполняющего обновление местоположения, перед обновлением местоположения и второй информации о местоположении после обновления местоположения; и
блок обработки информации о местоположении, сконфигурированный для получения информации об обновлении местоположения UE, в соответствии с первой информацией о местоположении UE до обновления местоположения и второй информацией о местоположении после обновления местоположения, полученных блоком приема информации о местоположении.
| Mitsubishi Electric: "Self-optimization of assigned ТА list from reported list of last visited TAs", 3GPP DRAFT; S2-073219, 27-31 AUGUST 2007, ч.2 с.2-3 | |||
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ В СИСТЕМЕ ЭЛЕКТРОСВЯЗИ | 2000 |
|
RU2263412C2 |
| WO 9957935 A1, 11.11.1999 | |||
| WO 2005074355 A2, 18.08.2005. | |||

