Изобретение относится к фотоэлектрическим измерительным устройствам для измерения углов, угловых координат и угловых перемещений, основанных на применении поляризационной оптики.
Известны устройства, обеспечивающие измерения угловых величин, построенные на использовании геометрической и поляризационной оптики, где точность измерений зависит от точности изготовления масок, нанесенных на оптические элементы, от расположения оптических элементов (дифракционные погрешности), или на точность влияет нелинейность характеристик интенсивности проходящего света, что ограничивает диапазон измерения углов, при заданной точности [1, 2].
Наиболее близким техническим решением к предлагаемому изобретению является устройство для измерения углов скручивания [3]. Устройство состоит из линейного поляризационного канала в виде излучателя с естественной поляризацией и оптически связанной с ним призмы-поляризатора, призмы-анализатора, обладающими возможностью поворота относительно оптической оси, с механическим щупом, вставленным в обойму подшипника вращения, и регистратора плоскости поляризации.
Недостатками вышеприведенного устройства являются отсутствие статической нулевой привязки к регистратору и невозможность производить измерения в динамике.
Основной задачей, на решение которой направлено изобретение, является расширение эксплуатационных возможностей устройства для измерения угла, увеличение диапазона и точности измерений угловых величин.
Для решения поставленной задачи предлагается устройство для измерения угла, которое, как и прототип, содержит линейный поляризационный канал в виде излучателя монохроматического излучения, призмы-поляризатора, призмы-анализатора и регистратора.
В отличие от прототипа в устройство дополнительно введена электромеханическая следящая система, выполненная в виде индукционного датчика угла, двигателя отработки и электронного блока управления, при этом призма-анализатор жестко закреплена на роторе индукционного датчика угла под углом к нулевому положению индукционного датчика угла.
Сущность предлагаемого изобретения заключается в том, что устройство для измерения угла имеет фиксированное нулевое положение, связанное с нулевым положением индукционного датчика угла, и диапазон измеряемых углов от 0 до 360°, при этом во всем диапазоне измеряемых углов от 0 до 360°, поляризационный канал работает в линейной зоне.
Для повышения точности измерений устройство имеет две системы отсчета: грубую, в виде сигнала индукционного датчика угла и точную, в виде сигнала регистратора поляризационного канала.
Амплитудно-фазовое детектирование сигнала регистратора поляризационного канала осуществляется благодаря искусственному сбитию «нуля» устройства, в виде дополнительного разворота призмы-анализатора на небольшой угол относительно ротора индукционного датчика угла и компенсации этого разворота дополнительным электрическим сигналом, введенным в противофазе на сложение к основному сигналу регистратора.
Сущность предлагаемого изобретения заключается в том, что при любых взаимных поворотах объектов А и Б (см. фиг.1 и 2) появилась возможность измерять абсолютный взаимный угол поворота между ними в зоне линейной зависимости, т.е. без потери точности измерения.
Предлагаемое изобретение проиллюстрировано чертежами, где на фиг.1 и фиг.2 представлена оптико-кинематическая схема устройства; на фиг.3 - электрическая функциональная схема устройства; на фиг.4 - чертежи масок, нанесенных на оптические элементы, для определения положения устройства относительно «ложного нуля»; на фиг.5 - графики сигналов регистратора измерения угла при различных режимах работы устройства.
Устройство для измерения угла состоит из излучателя монохроматического излучения 1, лазерного типа, красного светового спектра, с естественной поляризацией, излучателя-теста 2, фиолетового светового спектра (обычного светодиода), плоскопараллельной пластины с маской 3, светоделительной пластины 4, фотоприемника обратной связи по яркости 5, призмы-поляризатора 6, призмы-анализатора 7, индукционного датчика угла 8, подшипника 9, двигателя отработки 10 и регистратора 11.
Устройство измерения угла содержит электронные блоки и устройства для обработки сигналов и управления, изображенные на электрической функциональной схеме, представленной на фиг.3: блок коммутации 12 для включения излучателя-теста 2, устройство автоматической регулировки усиления (АРУ) 13 для поддержания стабильности излучения по яркости излучателя монохроматического излучения 1, предусилитель-фильтр 14 для фильтрации сигнала фотоприемника обратной связи по яркости 5, датчик температуры 15, устанавливаемый на корпус регистратора 11 для компенсации температурного дрейфа нуля и коэффициента передачи регистратора 11; блок управления 16, содержащий предусилитель-фильтр для фильтрации и усиления сигнала регистратора 11, 12-ти-разрядный аналого-цифровой преобразователь (АЦП) для оцифровки сигнала регистратора 11; аналого-фазовый детектор (АФД); однокристальную ЭВМ для обработки: сигналов с регистратора 11, индукционного датчика угла 8 и датчика температуры 15; управления: двигателем отработки 10, блоком коммутации 12 и блоком индикации 17, выдающей информацию об измеренном угле в визуальной форме; вторичный аналого-цифровой преобразователь угла для преобразования сигнала с индукционного датчика угла 8; универсальный контроллер моментного двигателя для управления двигателем отработки 10. Электронный блок управления 16 также содержит внешний интерфейс для подключения к компьютерной сети, с целью внешнего обслуживания и передачи данных. Электронный блок управления 16 выдает визуальную информацию на блок индикации 17.
Работа устройства осуществляется следующим образом.
После подачи электропитания на устройство и включения лазерного диода, световой пучок от излучателя монохроматического излучения 1 проходит через светоделительную пластину 4, попадает на верхнюю грань призмы-поляризатора 6 и поступает на поверхность фотоприемника обратной связи по яркости 5. Призма-поляризатор 6, излучатель монохроматического излучения 1 и излучатель-тест 2, фотоприемник обратной связи по яркости 5, плоскопараллельная пластина с маской 3 и светоделительная пластина 4 жестко связаны с корпусом объекта А. Пройдя через призму-поляризатор 6, плоскополяризованный световой пучок попадает на призму-анализатор 7 и далее на регистратор 11. С фотоприемника обратной связи по яркости 5, имеющего узкополосную чувствительность в красном световом спектре, сигнал, пропорциональный яркости излучателя монохроматического излучения 1, попадает на предусилитель-фильтр 14 и, далее, на устройство АРУ 13, которое регулирует ток излучателя монохроматического излучения 1, стабилизируя яркость его излучения. Предусилитель-фильтр 14 не только усиливает сигнал обратной связи, но и фильтрует его от высокочастотных составляющих, связанных с шумами фотоприемника обратной связи по яркости 5. Ротор двигателя отработки 10 жестко связан с ротором индукционного датчика угла 8 внутренней обоймой подшипника 9 и призмой-анализатором 7. Внешняя обойма подшипника 9, статор двигателя отработки 10, статор индукционного датчика угла 8 и регистратора 11 жестко связаны с корпусом объекта Б. В рабочем режиме с регистратора 11 сигнал, зависящий от яркости плоскополяризованного света и угла взаимного разворота призмы-поляризатора 6 и призмы-анализатора 7 (по закону Малюса [4]), поступает в электронный блок управления 16, который выдает сигнал управления на двигатель отработки 10. Двигатель отработки 10 начинает разворачиваться, при этом разворот ротора двигателя отработки 10, ротора индукционного датчика угла 8 и призмы-анализатора 7 относительно корпуса объекта Б производится до «нулевого» перекрестного положения призмы-поляризатора 6 и призмы-анализатора 7, т.е. до минимального значения сигнала с регистратора 11. При этом с индукционного датчика угла 8 снимается сигнал, пропорциональный углу разворота его ротора относительно статора, т.е. углу разворота объекта А относительно объекта Б (грубый отсчет устройства). Этот сигнал поступает в блок управления 16, где оцифровывается и складывается с оцифрованным остаточным сигналом регистратора 11 (точный отсчет устройства), который формируется как сумма статической и динамической ошибок электромеханической следящей системы: «Регистратор 11 - блок управления 16 - двигатель отработки 10»; затем сигнал выдается на блок индикации 17 потребителю в виде цифрового значения угла. Далее электромеханическая следящая система «Регистратор 11 - электронный блок управления 16 - двигатель отработки 10» постоянно отслеживает положение призмы-поляризатора 6 и призмы-анализатора 7 в пределах точного отсчета, не допуская их большого рассогласования, с выдачей мгновенного значения угла между объектами А и Б.
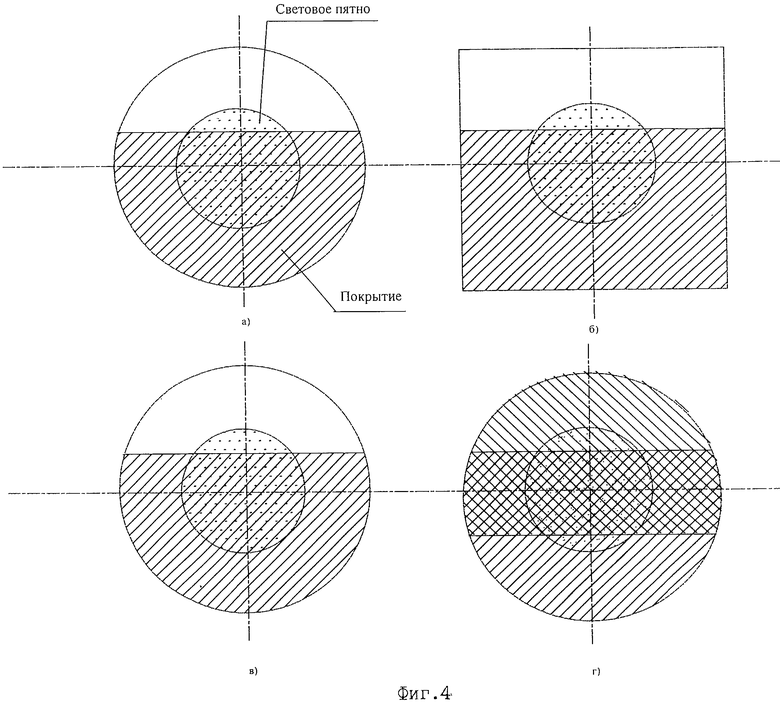
В начале работы устройства, для исключения захвата им «ложного нуля» производится настройка - выставка нулевого положения устройства. Для этого используется оптический канал излучателя-теста 2. На нижней поверхности (основание) призмы-анализатора 7 нанесено специальное покрытие, слой которого является прозрачным для красного света и непрозрачным для фиолетового. Такое же покрытие наносится и на плоскопараллельную пластину с маской 3. Покрытие наносится так, чтобы оно закрывало чуть больше половины светового диаметра пучка, попадающего на эти элементы, как изображено на фиг.4, где: а) - условный вид маски на плоскопараллельной пластине с маской 3 со стороны излучателя-теста 2; б) - условный вид маски на основании призмы-анализатора 7 со стороны излучателя-теста 2; в) - условный вид на поверхности регистратора 11 со стороны излучателя-теста 2 при взаимном развороте призмы-поляризатора 6 и призмы-анализатора 7 на 180°; г) - условный вид на регистраторе 11 со стороны излучателя-теста 2 при взаимном развороте призмы-поляризатора 6 и призмы-анализатора 7 на 0°.
Расположение масок на плоскопараллельной пластине с маской 3 и призме-анализаторе 7относительно оптического канала, связывающего объект А и объект Б, таково, что только при положении устройства в истинном нуле свет от излучателя-теста 2 на регистратор 11 не попадает. При подаче электропитания с электронного блока управления 16 выдается сигнал на блок коммутации 12 и происходит включение излучателя-теста 2. Световой пучок излучателя-теста 2 через плоскопараллельную пластину с маской 3 попадает на светоделительную пластину 4 и, отражаясь от нее, направляется в основной поляризационный канал через призму-поляризатор 6 и призму-анализатор 7 на регистратор 11. При этом свет от излучателя монохроматического излучения 1 также поступает на регистратор 11. Одновременно с блока управления 16 выдается сигнал на двигатель отработки 10, пропорциональный номинальной скорости вращения двигателя. Фаза сигнала выбирается таким образом, чтобы вращение призмы-анализатора 7 со стороны призмы-поляризатора 6 наблюдалось по часовой стрелке. Эта фаза считается отрицательной.
В каком бы положении при начале работы не находилось устройство, без прохождения «ложного нуля» устройство работу в обычном режиме не начинает. Двигатель отработки 10 разворачивает призму-анализатор 7 до тех пор, пока блок управления 16 не примет сигнал с регистратора 11 о прохождении «ложного нуля». Графики сигналов, принимаемых электронным блоком управления 16 с регистратора 11, изображены на фиг.5, где представлены условные графики сигналов с регистратора 11 и блока управления 16:
UФП - напряжение сигнала с регистратора 11;
φП-А - угол между призмой-поляризатором 6 и призмой-анализатором 7;
Ů - производная напряжения сигнала регистратора 11;
φК - угол поворота призмы-поляризатора 6 и призмы-анализатора 7 для пучка красного спектра;
φФ - угол поворота призмы-поляризатора 6 и призмы-анализатора 7 для пучка фиолетового спектра;
 - напряжение сигнала компенсации.
- напряжение сигнала компенсации.
Величина сигнала с регистратора 11 в «ложном нуле» превышает величину сигнала в истинном нуле.
После прохождения «ложного нуля» с блока управления 16 в блок коммутации 12 выдается сигнал на отключение излучателя-теста 2, а двигатель отработки 10 продолжает разворачивать призму-анализатор 7 в том же направлении, до переключения устройства в рабочий режим, при этом регистратор 11 принимает световой поток уже только от излучателя монохроматического излучения 1, фаза сигнала управления двигателем отработки 10 остается прежней.
Для обеспечения работы устройства в рабочем режиме электронный блок управления 16 выдает управляющий сигнал на двигатель отработки 10 соответствующей амплитуды и фазы. Значение амплитуды и фазы выходного сигнала электронного блока управления 16 формируется АФД в составе электронного блока управления 16.
Работа АФД происходит следующим образом: изначально, при установке призмы-анализатора 7 на ротор индукционного датчика угла 8, нулевое (скрещенное) положение призмы-анализатора 7 относительно призмы-поляризатора 6 развернуто относительно нулевого положения индукционного датчика угла 8 (ротор-статор), на некоторый начальный угол φ0, и в этом положении они жестко скреплены (ротор индукционного датчика угла 8 - призма-анализатор 7). Величина угла φ0 выбирается из условия  , где φ∂мах - максимальная динамическая ошибка электромеханической следящей системы: «регистратор 11 - электронный блок управления 16 - двигатель отработки 10»;
, где φ∂мах - максимальная динамическая ошибка электромеханической следящей системы: «регистратор 11 - электронный блок управления 16 - двигатель отработки 10»;
φсмах - максимальная статическая ошибка той же системы;
φлфмах - максимальный угол поворота между призмами анализатора 7 и поляризатора 6, при котором сигнал с регистратора 11 находится в линейной зоне.
При включении рабочего режима после прохождения «ложного нуля» в блоке управления 16 к сигналу, идущему от регистратора 11 в цепи управления: «регистратор 11 - предусилитель-фильтр - АЦП - АФД», программно добавляется сигнал в противофазе, по амплитуде соответствующий углу φ0. Происходит это в тот момент, когда до нулевого согласованного положения призмы-анализатора 7 и призмы-поляризатора 6 (по амплитуде сигнала с регистратора 11) остается угол φ<φ0, при этом сигнал φ0 выдается в отрицательной фазе, а сигнал с регистратора 11 по фазе считается положительным (см. фиг.5). После этого электромеханическая следящая система начинает полноценно отслеживать амплитуду и фазу сигнала регистратора 11 и устройство вступает в рабочий режим.
Для компенсации температурного влияния на работу устройства на корпусе регистратора 11 жестко крепится датчик температуры 15, сигнал с которого поступает на блок управления 16. По амплитуде этого сигнала в программном режиме корректируется коэффициент передачи и нулевой дрейф сигнала регистратора 11 при изменении температурных условий.
Основным преимуществом заявленного изобретения является возможность получения информации о взаимном положении двух объектов А и Б относительно измерительной оси в реальном режиме времени без ограничения величины измеряемого угла, что расширяет эксплуатационные возможности устройства для использования в различных приборах и системах.
Источники информации
1. Российская Федерация, патент №2116618, МПК G01B 11/26, опубл. 27.07.1998.
2. Япония патент №JP5223552 (А), МПК: G01B 11/26, опубл. 31.08.1993.
3. Российская Федерация, патент №2073198, МПК G01B 11/26, опубл. 10.02.1997 - прототип.
4. А.А.Детлаф, Б.М.Яворский. Курс физики Т.3 М.: Высшая школа, 1979, с.151-154.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2009 |
|
RU2429498C2 |
| Способ измерения степени поляризации светового излучения молний и устройство для его осуществления (варианты) | 2020 |
|
RU2761781C1 |
| ТУРБОПОЛЯРИМЕТР | 2004 |
|
RU2269101C1 |
| Прецизионный спектрополяриметр | 1990 |
|
SU1742635A1 |
| Устройство для определения угла наклона | 1979 |
|
SU787895A1 |
| Двухсторонний скоростной эллипсометр | 2020 |
|
RU2749149C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО МАГНИТНОГО ПОЛЯ И ЭЛЕКТРИЧЕСКОГО ТОКА | 2010 |
|
RU2428704C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В МОНОКРИСТАЛЛИЧЕСКИХ МАТЕРИАЛАХ ПОЛЯРИЗАЦИОННО-ОПТИЧЕСКИМ МЕТОДОМ | 2002 |
|
RU2240501C2 |
| Устройство для определения магнитных и магнитооптических характеристик материалов | 1982 |
|
SU1022086A1 |
| Анализатор пространственных секторов | 1981 |
|
SU1095057A1 |


Устройство содержит линейный поляризационный канал в виде излучателя монохроматического излучения, призмы-поляризатора, призмы-анализатора и регистратора. В устройство дополнительно введена электромеханическая следящая система, выполненная в виде индукционного датчика угла, двигателя отработки и электронного блока управления. Призма-анализатор жестко закреплена на роторе индукционного датчика угла под углом к нулевому положению индукционного датчика угла. Технический результат - расширение эксплуатационных возможностей, увеличение диапазона и точности измерений угловых величин. 5 ил.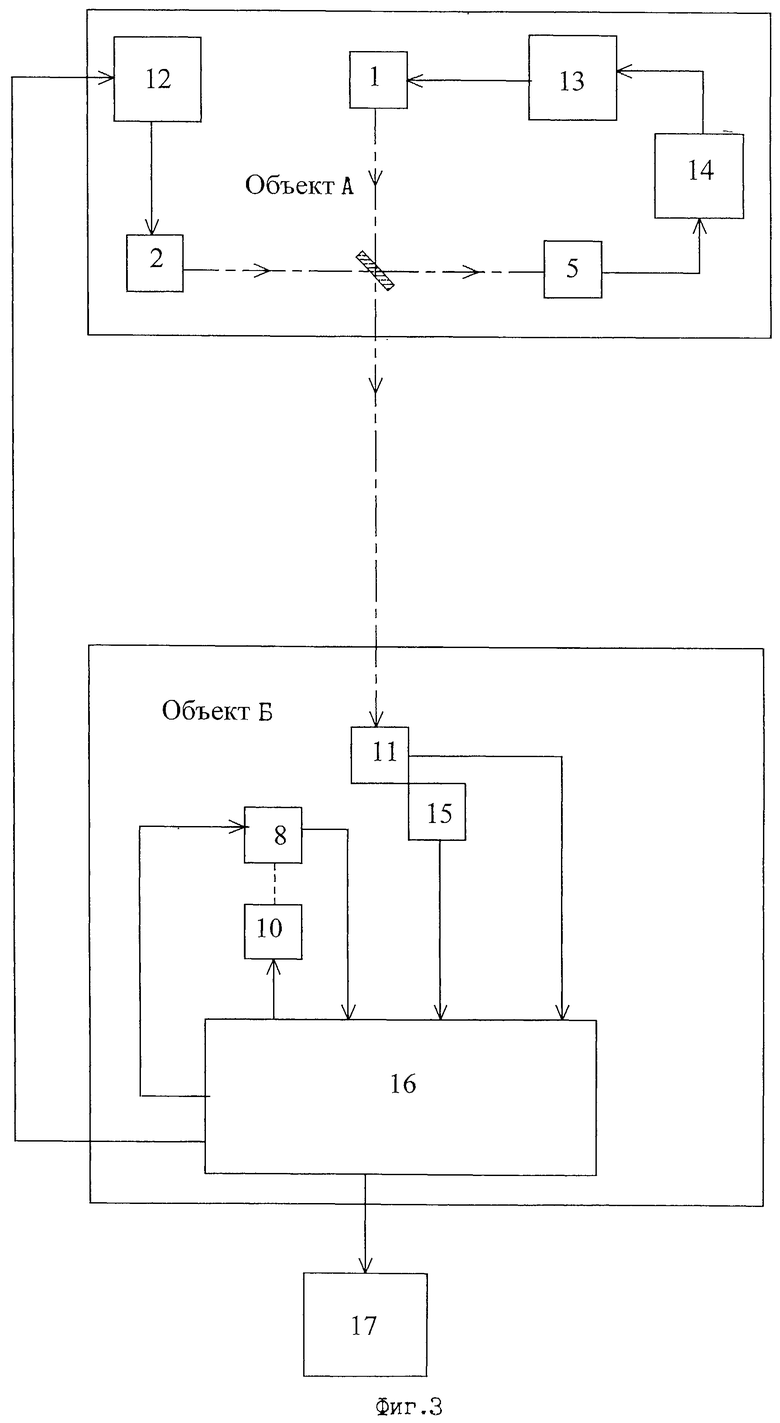
Устройство для измерения угла, содержащее линейный поляризационный канал в виде излучателя монохроматического излучения, призмы-поляризатора, призмы-анализатора и регистратора, отличающееся тем, что в устройство дополнительно введена электромеханическая следящая система, выполненная в виде индукционного датчика угла, двигателя отработки и электронного блока управления, при этом призма-анализатор жестко закреплена на роторе индукционного датчика угла под углом к нулевому положению индукционного датчика угла.
| RU 2073198 C1, 10.02.1997 | |||
| Угловой датчик | 1975 |
|
SU572647A1 |
| JP 3122687 B2, 09.01.2001. | |||

