ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу мультиплексирования с пространственным разделением (ниже именуемому MIMO ("с множеством входов и множеством выходов)" и, в частности, к системе связи MIMO, надлежащим образом примененной к системе микроволновой связи между стационарными точками, находящимися в пределах прямой видимости.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
За последние годы метод c использованием MIMO стал популярным в области техники беспроводной связи, и сами системы MIMO больше не являются новой технологией. Обычные технологии, в которых используют MIMO, в основном, сосредоточены на мобильной связи, и применение MIMO для стационарной связи не было полностью исследовано. В радиоканалах мобильной связи радиоволна, исходящая из передающей антенны, отражается или рассеивается в соответствии с окружающим ландшафтом и доходит до приемника в виде группы волн, что приводит к возникновению явления замирания, которое являлось препятствием для достижения высококачественной связи. Технология MIMO в мобильной связи не считает явление замирания устрашающим, но рассматривает его как ресурсы окружающей среды с большими потенциальными возможностями, которые свойственны распространению радиоволн при мобильной связи. В этом отношении технологию MIMO расценивают как революционную технологию.
Несмотря на наличие меньшего количества примеров, чем в случае мобильной связи, в непатентном документе 1 раскрыты последствия применения такой технологии MIMO для стационарной радиосвязи в пределах прямой видимости в тех случаях, когда каналы радиосвязи являются детерминированными.
Как описано выше, в мобильной связи каналы рассматривают как вероятностную матрицу. С другой стороны, в случае стационарной радиосвязи в пределах прямой видимости каналы радиосвязи необходимо рассматривать как детерминированные каналы радиосвязи, где взаимное геометрическое расположение передающей и приемной антенн является неизменным.
В вышеупомянутом непатентном документе 1 описано, как изложено ниже, какое влияние оказано на канальную матрицу Н, устанавливающую каналы между передающими и приемными антеннами, в результате увеличения расстояния, на которое разнесены антенны, на обеих сторонах: на стороне передачи и на стороне приема.
[Формула 1]
где n - количество антенн, Нн - транспонированная эрмитова матрица Н, а I - единичная матрица.
Согласно непатентному документу 1 поворот фазы сигнала относительно i-той передающей антенны и k-той приемной антенны, которые расположены линейно таким образом, что являются обращенными друг к другу, между стороной передачи и стороной приема, задают согласно приведенной ниже формуле, и в силу этого передающие и приемные антенны могут быть сформированы посредством линейных антенн.
[Формула 2]
 .
.
Соответственно, когда n=2, то канальная матрица H представлена приведенной ниже формулой:
[Формула 3]
 ,
,
где j - символ, представляющий собой мнимое число.
В этом случае возможна конфигурация антенн, удовлетворяющая условию из формулы (1). В непатентном документе 1 описано, что когда удовлетворено условие из формулы (1), то пропускная способность канала связи в конфигурации MIMO становится максимальной при H max.
Таким образом, увеличение пропускной способности канала связи на основании конфигурации MIMO может ожидаться не только в среде мобильной связи, в которой имеет место отражение или рассеяние, но также и в среде детерминированной связи в пределах прямой видимости.
С другой стороны, в системе микроволновой связи между стационарными точками используют диапазон частот от нескольких ГГц до нескольких десятков ГГц, который соответствует длинам волн от нескольких мм до нескольких см. Следовательно, может произойти существенный поворот фазы вследствие движения в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. В такой ситуации трудно обеспечить детерминированную канальную матрицу.
Следует отметить, что теоретический анализ, описание которого приведено ниже, аналитически выявляет, что вышеупомянутое увеличение пропускной способности канала связи может быть достигнуто даже тогда, когда происходит такое смещение в направлении высокочувствительной антенны.
В технологии MIMO множество независимых сигналов передают/принимают в одном и том же диапазоне частот. Следовательно, необходимо разделение/обнаружение сигналов. В качестве средства реализации этого имеется известный способ (ниже, именуемый способом CP (SVD)), основанный на матричных вычислениях с использованием унитарной матрицы, которая получена путем сингулярного разложения (CP). Предполагают, что в идеальном случае в способе CP информация для построения унитарной матрицы может быть передана от стороны приема к стороне передачи. В этом случае, даже когда имеет место вышеупомянутое смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение. В результате этого на основании конфигурации MIMO может быть реализована микроволновая связь между стационарными точками с большой пропускной способностью.
Непатентный документ 1: IEEE TRANSACTIONS ON COMMUNICATIONS, VOL.47, NO. 2, FEBRUARY 1999. P. 173-176, On the Capacity Formula for Multiple Input-Multiple Output Wireless Channels: A Geometric Interpretation.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Однако вышеупомянутая информация, передаваемая по линии обратной связи, может привести к увеличению непроизводительных издержек в системе из-за передачи служебных сигналов. Кроме того, необходимо подготовить обратный канал для обмена информацией, передаваемой по линии обратной связи. Следует отметить, что при моделировании канальной матрицы H, описание которой приведено ниже, выполняют анализ, включающий в себя учет смещения в направлении высокочувствительной антенны.
При выполнении сингулярного анализа для постоянных каналов, работающих в пределах прямой видимости, когда эти каналы являются детерминированными, существует положение между антеннами, в котором собственное значение является условием множественности для генерации сингулярной точки. Несмотря на то что сингулярное значение однозначно определено, сингулярные векторы не являются однозначно определенными. Это состояние, которое вызывает особые затруднения с аналитической точки зрения, может вызвать существенную трансформацию сингулярных векторов.
Однако при использовании этого явления возможны различные конфигурации. Описание различных примеров конфигураций, в которых целесообразно используют эти характеристики, приведено ниже.
Главной проблемой в детерминированной конфигурации MIMO в пределах прямой видимости является проблема, заключающаяся в том, что в вышеупомянутом обычном способе должна быть достигнута синхронизация по несущей между антеннами на стороне передачи или на стороне приема. То есть разность фаз между множеством антенн на стороне передачи или на стороне приема должна быть одинаковой, или разность фаз должна быть постоянной.
С другой стороны, в системе микроволновой связи между стационарными точками расстояние, на которое разнесены антенны, должно быть увеличено из-за используемой частоты. Соответственно, вблизи антенн установлены устройства радиосвязи, содержащие гетеродины. То есть проблема необходимости достижения синхронизации по несущей между антеннами накладывает строгое ограничение на построение системы микроволновой связи между стационарными точками.
Следовательно, задачей настоящего изобретения является создание системы связи MIMO, имеющей детерминированные каналы, в которой конфигурация MIMO применена к каналам, работающим в пределах прямой видимости, которые имеют неизменное взаимное геометрическое расположение, для увеличения пропускной способности канала связи, и соответствующего ей способа.
Другой задачей настоящего изобретения является создание системы связи MIMO, способной обеспечивать функционирование, эквивалентное обычному способу CP, без информации, передаваемой по линии обратной связи, которую необходимо передавать от стороны приема к стороне передачи для построения унитарной матрицы в способе СР.
Кроме того, главной задачей настоящего изобретения является создание системы связи MIMO, в которой решена проблема необходимости достижения синхронизации по несущей между антеннами, налагающая строгое ограничение на построение системы микроволновой связи между стационарными точками.
Еще одной задачей настоящего изобретения является создание системы связи с множеством входов и множеством выходов (MIMO), способной обеспечивать функционирование, эквивалентное способу СР, даже при условии сложности обеспечения детерминированной канальной матрицы вследствие существенного поворота фазы, вызванного движением в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды.
Конфигурация MIMO согласно настоящему изобретению представляет собой такую связь в пределах прямой видимости, что имеется некоторая корреляция между сигналами множества антенн, и этим она отличается от конфигурации MIMO, используемой в обычной мобильной связи. То есть обычная система мобильной связи или система беспроводной локальной сети, предназначенная для работы в помещении, реализована на основании предположения о том, что какая-либо корреляция между сигналами множества антенн отсутствует. Следовательно, следует отметить, что в отличие от конфигурации MIMO согласно настоящему изобретению обычная конфигурация MIMO не работает в том состоянии, когда имеется некоторая корреляция между антеннами.
СРЕДСТВА РЕШЕНИЯ ЗАДАЧ
Согласно настоящему изобретению для решения вышеупомянутых задач предложена система связи в пределах прямой видимости MIMO, содержащая множество каналов, которая отличается тем, что содержит: блок обработки по вычислению канальной матрицы на стороне передачи, или на стороне приема, или на обеих сторонах: на стороне передачи и на стороне приема, в которой блок обработки по вычислению канальной матрицы обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны (которой является, например, передающая антенна, светоизлучающее устройство, громкоговоритель и т.п., используемые при распространении электрических волн) или приемной антенны (которой является, например, приемная антенна, светоприемное устройство, микрофон и т.п., используемые при распространении электрических волн) или в соответствии с флуктуацией каналов.
Для формирования виртуальных ортогональных каналов геометрические параметры каналов устанавливают таким образом, чтобы собственное значение канальной матрицы стало условием множественности, и на одной из сторон: на стороне передачи или на стороне приема выполняют вычисление унитарной матрицы, сформированной на основании собственного вектора, полученного из собственного значения, или собственного вектора, полученного из линейной суммы собственных векторов.
Система связи MIMO представляет собой систему микроволновой связи между стационарными точками, в которой используют множество антенн и которая сформирована с использованием гетеродинов, которые предоставляются независимо для соответствующих антенн на одной из сторон или на обеих сторонах: на стороне передачи и на стороне приема.
Система связи MIMO содержит средство обнаружения флуктуации местоположения передающей антенны или местоположения приемной антенны или флуктуации каналов, и на основании результата обнаружения, полученного из этого средства, производят обновление матрицы формирования виртуальных ортогональных каналов.
ПРЕИМУЩЕСТВА НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Система связи MIMO согласно настоящему изобретению содержит множество каналов. Кроме того, система содержит блок обработки по вычислению канальной матрицы на стороне передачи, или на стороне приема, или на обеих сторонах: на стороне передачи и на стороне приема. Блок арифметической обработки канальной матрицы обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны или местоположения приемной антенны или в соответствии с флуктуацией каналов. При использовании этой конфигурации имеется возможность демпфирования флуктуации местоположения передающей антенны или местоположения приемной антенны или флуктуации каналов, создавая, тем самым, систему связи MIMO, способную обеспечивать максимальную пропускную способность системы связи.
Кроме того, для формирования виртуальных ортогональных каналов геометрические параметры каналов установлены таким образом, чтобы собственное значение канальной матрицы являлось условием множественности, и вычисление унитарной матрицы, сформированной на основании собственного вектора, полученного из собственного значения, или собственного вектора, полученного из линейной суммы собственных векторов, выполняют на одной из сторон: на стороне передачи или на стороне приема. Это обеспечивает возможность гибкой конструкции системы и возможность реализации конфигурации, в которой отсутствует необходимость использования обратного канала для обмена информацией, передаваемой по линии обратной связи, и конфигурации, в которой выполняют только обработку передач.
Кроме того, система связи MIMO представляет собой систему микроволновой связи между стационарными точками, в которой используют множество антенн и которая сформирована с использованием гетеродинов, которые предоставляются независимо для соответствующих антенн на одной из сторон или на обеих сторонах: на стороне передачи и на стороне приема. При использовании этой конфигурации имеется возможность решить проблему необходимости достижения синхронизации по несущей между антеннами, которая налагает строгое ограничение на построение системы микроволновой связи между стационарными точками.
Кроме того, обработка по вычислению матрицы для формирования виртуальных ортогональных каналов может быть выполнена только на стороне приема. При использовании этой конфигурации может быть создана система связи MIMO, в которой отсутствует необходимость использования обратного канала для периодического и частого обмена информацией, передаваемой по линии обратной связи.
Кроме того, система связи MIMO содержит средство обнаружения флуктуации местоположения передающей антенны или местоположения приемной антенны или флуктуации каналов, и в ней используют результат обнаружения, полученный из этого средства, для обновления матрицы формирования виртуальных ортогональных каналов. При использовании этой конфигурации может быть создана беспроблемная система связи MIMO, имеющая удовлетворительные условия монтажа и жесткую структуру.
Кроме того, система связи MIMO содержит средство передачи контрольных сигналов от стороны передачи к стороне приема, обнаруживает флуктуацию местоположения передающей антенны или местоположения приемной антенны или флуктуацию каналов по контрольным сигналам и производит обновление матрицы формирования виртуальных ортогональных каналов на основании результата обнаружения. При использовании этой конфигурации может быть создана беспроблемная система связи MIMO, имеющая удовлетворительные условия монтажа и жесткую структуру.
Кроме того, система связи MIMO содержит средство передачи контрольных сигналов соответствующих антенн от стороны передачи к стороне приема и на основании контрольных сигналов выполняет обработку по вычислению матрицы для формирования виртуальных ортогональных каналов только на стороне приема. При использовании этой простой обработки может быть создана система связи MIMO, в которой отсутствует необходимость использования обратного канала для периодического и частого обмена информацией, передаваемой по линии обратной связи.
Кроме того, контрольные сигналы, подлежащие передаче от стороны передачи к стороне приема, генерируют до обработки, выполняемой гетеродинами. При использовании этой конфигурации фазовый шум между гетеродинами, сгенерированный на стороне передачи, может быть обнаружен на стороне приема, и сгенерированный фазовый шум может быть скомпенсирован путем обновления матрицы.
Кроме того, обнаружение контрольных сигналов, которые были переданы от стороны передачи к стороне приема, выполняют после обработки, выполненной гетеродинами на стороне приема. При использовании этой конфигурации фазовый шум между гетеродинами, сгенерированный на стороне приема, может быть обнаружен на стороне приема, и сгенерированный фазовый шум может быть скомпенсирован путем обновления матрицы.
Кроме того, контрольные сигналы, переданные от стороны передачи к стороне приема, являются ортогональными между передающими антеннами. При использовании этой конфигурации фазовый шум между гетеродинами и смещение в направлении высокочувствительной антенны, вызванное погодными условиями, могут быть обнаружены простым коррелятором, и обнаруженный фазовый шум или обнаруженное смещение могут быть скомпенсированы путем обновления матрицы.
Кроме того, в качестве каналов, работающих в пределах прямой видимости, могут быть использованы оптические каналы или акустические каналы, а также каналы электрических волн. В этом случае также может быть создана система связи MIMO.
Кроме того, один или оба параметра, которыми являются расстояние, на которое разнесены антенны из множества передающих антенн или из множества приемных антенн, и направление множества передающих антенн или множества приемных антенн, делают изменяемыми. При использовании этой конфигурации может быть создана система связи MIMO, в которой всегда может быть достигнута максимальная пропускная способность системы связи путем регулирования одного или обоих из расстояния, на которое разнесены передающие антенны или приемные антенны, и осевого направления передающих антенн или приемных антенн, вне зависимости от типа геометрической формы каналов, работающих в пределах прямой видимости.
В настоящем изобретении вышеупомянутые эффекты необязательно должны быть достигнуты одновременно, но может быть достигнут, по меньшей мере, один из эффектов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 показан пример конфигурации системы MIMO, работающей в пределах прямой видимости, в которой использован способ СР, в котором расстояние, на которое разнесены антенны, установлено произвольно и учтена флуктуация местоположения антенны в направлении высокочувствительной антенны;
на Фиг. 2 показан первый пример (первый пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором вычисление матрицы на основании унитарной матрицы V выполняют только на стороне передачи;
на Фиг. 3 показан второй пример (второй пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором вычисление матрицы на основании унитарной матрицы выполняют только на стороне передачи и в котором виртуальные ортогональные каналы имеют различные значения;
на Фиг. 4 показан третий пример (третий пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором вычисление матрицы на основании унитарной матрицы выполняют только на стороне приема и в котором гетеродины предоставлены независимо для соответствующих антенн на стороне передачи;
на Фиг. 5 показан четвертый пример (четвертый пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором вычисление матрицы на основании унитарной матрицы выполняют только на стороне приема и в котором гетеродины предоставлены независимо для соответствующих антенн на стороне передачи и на стороне приема;
на Фиг. 6 показан пятый пример (пятый пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором вычисление матрицы на основании унитарной матрицы выполняют только на стороне приема, в котором виртуальные ортогональные каналы имеют различные значения и в котором гетеродины предоставлены независимо для соответствующих антенн на стороне передачи и на стороне приема;
на Фиг. 7 показан шестой пример (шестой пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором на стороне передачи и на стороне приема установлено соответственно по три антенны и в котором гетеродины предоставлены независимо для соответствующих антенн на стороне передачи и на стороне приема;
на Фиг. 8 показан седьмой пример (седьмой пример конфигурации) системы MIMO, работающей в пределах прямой видимости, согласно настоящему изобретению, в котором на стороне передачи и на стороне приема установлено соответственно по четыре антенны и в котором гетеродины предоставлены независимо для соответствующих антенн на стороне передачи и на стороне приема;
на Фиг. 9 показано сравнение значений отношения сигнал-шум (ОСШ) виртуальных ортогональных каналов, полученных на основании соответствующих способов, в зависимости от расстояния, на которое разнесены антенны;
на Фиг. 10 показан пример конфигурации, в которой значения расстояния, на которое разнесены антенны, отличаются друг от друга на стороне передачи и на стороне приема;
на Фиг. 11 показано моделирование каналов из Фиг. 10;
на Фиг. 12 показана пропускная способность системы связи в случае из Фиг. 10, в котором значения расстояния, на которое разнесены антенны, отличаются друг от друга на стороне передачи и на стороне приема;
на Фиг. 13 показан пример конфигурации, в которой схема расположения антенн между стороной передачи и стороной приема выполнена имеющей ромбовидную форму;
на Фиг. 14 показан пример конфигурации, в котором схема расположения антенн между стороной передачи и стороной приема выполнена имеющей ромбовидную форму и в котором вычисление матрицы на основании унитарной матрицы выполняют только на стороне приема;
на Фиг. 15 показан случай, в котором схема расположения антенн между стороной передачи и стороной приема выполнена имеющей произвольную геометрическую форму;
на Фиг. 16 показан пример, в котором в качестве детерминированных каналов используют оптические каналы;
на Фиг. 17 показан пример, в котором в качестве детерминированных каналов используют акустические каналы;
на Фиг. 18 показан пример конфигурации антенн, используемой в конфигурации, в которой схема расположения антенн между стороной передачи и стороной приема выполнена имеющей произвольную геометрическую форму;
на Фиг. 19 показаны собственные значения виртуальных ортогональных каналов; и
на Фиг. 20 показан пример применения конфигурации, в которой вычисление матрицы выполняют только на стороне передачи.
ПОЯСНЕНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ
101, 201: блок обработки по вычислению матрицы на основании унитарной матрицы V;
102, 108, 402, 502, 510, 602, 610: блок преобразования частоты;
103, 105, 109, 111, 403, 407, 503, 507, 511, 515, 603, 607, 611, 615: смеситель;
104, 110, 404, 405, 504, 505, 512, 513, 604, 605, 612, 613: гетеродин;
106, 107, 202, 203, 302, 303, 408, 409, 508, 509, 608, 609: блок стационарных антенн;
112, 410, 517: блок обработки по вычислению матрицы на основании унитарной матрицы U;
301: блок обработки по вычислению матрицы на основании матрицы V;
401, 501, 601: блок генерации контрольных сигналов;
406, 506, 514, 606, 614: моделирование фазового шума, вызванного отсутствием синхронизации между несущими;
516, 616: блок обнаружения контрольных сигналов;
617: блок обработки по вычислению матрицы на основании матрицы U;
1601: лазерный диод (ЛД);
1602: фотоприемник (ФП);
1701: генератор ультразвуковых волн;
1702: ультразвуковой микрофон;
1801, 1802: элемент антенны;
1803: соединительная шина;
1804: шарнир;
2001: передающая станция;
2002: принимающая станция 1;
2003: принимающая станция 2.
ПРИМЕРНЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание варианта осуществления настоящего изобретения, который приведен в качестве примера, со ссылкой на сопроводительные формулы и сопроводительные чертежи. Перед этим приведено объяснение теоретической аргументации того факта, что пропускная способность канала связи в конфигурации MIMO становится максимальной даже при наличии детерминированных каналов, работающих в пределах прямой видимости.
Канальная пропускная способность виртуальных ортогональных каналов, основанных на конфигурации MIMO, представлена собственными значениями соответствующих трактов. Затем выполняют анализ собственных значений для конфигурации, в которой использованы две антенны. При последующем моделировании, для которого конфигурация антенн и символы, на которые приведены ссылки, показаны на Фиг. 1, учтено смещение в направлении высокочувствительной антенны. Несмотря на то что для удобства описан случай, в котором используют две антенны, те же самые вычисления могут быть применены вне зависимости от количества антенн.
Потери при распространении и общий сдвиг фазы с учетом расстояния R от передатчика до приемника не являются существенными, поэтому эти члены игнорируют. Различие каналов между диагональным каналом и прямым каналом представлено формулой (4).
[Формула 4]
 .
.
Поворот фазы α, в основе которого лежит различие каналов, представлен формулой (5).
[Формула 5]
 .
.
Предполагая, что радиочастота=30 ГГц, R=5000m, а расстояние, на которое разнесены антенны, dT=dR=5 м, α удовлетворяет следующему уравнению.
[Формула 6]
 .
.
Следовательно, канальная матрица H с учетом сдвига Φ фазы, в основе которого лежит флуктуация местоположения передающей антенны, предназначенной для передачи сигнала s2, которой является одна из двух передающих антенн для передачи сигналов s1 и s2, имеющихся на стороне передачи, представлена формулой (7).
[Формула 7]
 .
.
Следовательно, удовлетворено условие из формулы (8).
[Формула 8]
 .
.
В результате, собственные значения λ1 и λ2, представляющие собой значения пропускной способности канала для виртуальных ортогональных каналов, могут быть вычислены согласно приведенной ниже формуле. В приведенной ниже формуле H H - транспонированная эрмитова матрица канальной матрицы H.
[Формула 9]
 .
.
Результат вычисления по формуле (9) показан на Фиг. 19. Числовой результат на Фиг. 19 показывает случай, в котором через каждую одну антенну передают единичную мощность, и, следовательно, пропускная способность канала связи увеличена в два раза в соответствии с количеством антенн. Здесь следует отметить, что при моделировании, используемом в вышеупомянутых вычислениях, учтено смещение в направлении высокочувствительной антенны. Несмотря на это компонент смещения не появляется в результате для собственного значения, представляющем собой результирующую пропускную способность канала связи. То есть увеличение пропускной способности канала связи посредством конфигурации MIMO возможно даже в случае стационарной радиосвязи в пределах прямой видимости, где каналы радиосвязи являются детерминированными. Пропускная способность канала связи определяется расстоянием, на которое разнесены антенны, не имеющим отношения к смещению высокочувствительной антенны.
Выше был описан случай, в котором используют две антенны. Ниже приведено описание случая, в котором используют три или более антенн.
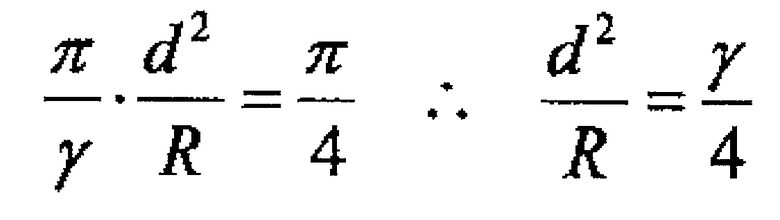
Поворот фазы между передающей антенной и приемной антенной, имеющими линейную схему расположения, в основании которого лежит различие каналов между ортогональным каналом и прямым каналом, получают из формулы 5. Предполагая, что расстояние, на которое разнесены антенны, имеет общее значение, равное d, поворот фазы представлен формулой (10).
[Формула 10]
 .
.
[Формула 11]
 .
.
Таким образом, когда d и расстояние R от передатчика до приемника заданы таким образом, что удовлетворяется приведенная выше формула (11), и рассматривается конфигурация, в которой использованы три антенны, может быть получена канальная матрица H 3, представленная формулой (12).
[Формула 12]
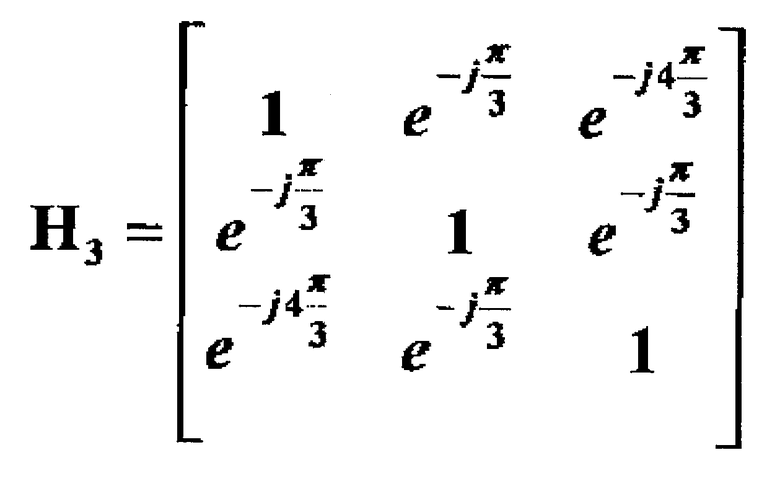 .
.
Следовательно, удовлетворяется формула (13).
[Формула 13]
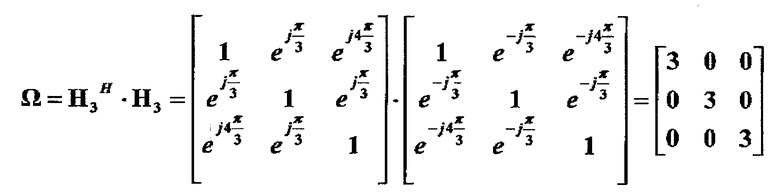 .
.
Таким образом, можно понять, что все три собственных значения, соответствующих пропускной способности канала связи для виртуальных ортогональных каналов, равны "3" и что полная пропускная способность канала связи увеличена в три раза в соответствии с количеством антенн.
[Формула 14]
 .
.
Аналогичным образом, когда d и расстояние R от передатчика до приемника заданы таким образом, что рассматривается конфигурация, в которой используют четыре антенны, может быть получена канальная матрица H 4, представленная формулой (15).
[Формула 15]
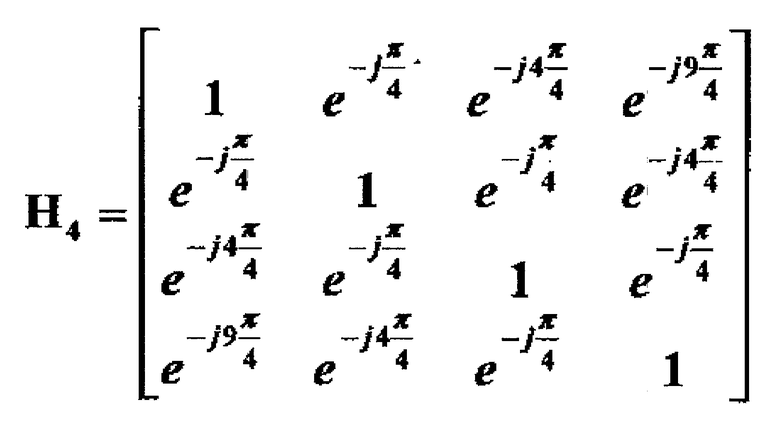 .
.
Следовательно, удовлетворяется формула (16).
[Формула 16]
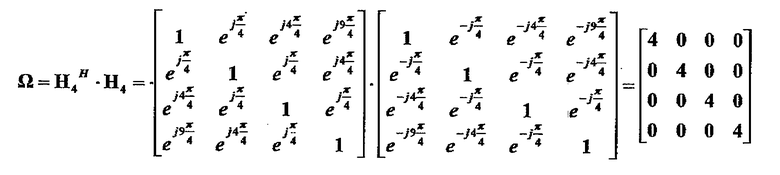
Таким образом, можно понять, что все четыре собственных значения, соответствующих пропускной способности канала связи для виртуальных ортогональных каналов, равны "4" и что полная пропускная способность канала связи увеличена в четыре раза в соответствии с количеством антенн.
То есть можно понять, что даже в том случае, когда количество антенн превышает 2, канальная пропускная способность детерминированных каналов, работающих в пределах прямой видимости, увеличивается в степени, соответствующей количеству антенн, которая является эквивалентной максимальной пропускной способности системы MIMO. Следует отметить, что хотя в приведенных ниже примерах для удобства описан случай, в котором используют две антенны, само собой разумеется, что это равным образом применимо и для случая, в котором количество антенн превышает 2.
Ниже приведено описание способа (ниже именуемого способом CP), основанного на вычислении матрицы с использованием унитарной матрицы, которая получена путем сингулярного разложения (CP), в качестве способа разделения/обнаружения сигналов в системе MIMO. В способе CP требуется вычисление матрицы с использованием унитарной матрицы V на стороне передачи и вычисление матрицы с использованием унитарной матрицы U на стороне приема. Для выполнения вычисления матрицы с использованием унитарной матрицы V необходимо передать информацию для построения унитарной матрицы, передаваемую по линии обратной связи от стороны приема к стороне передачи.
Ниже приведено подробное описание варианта осуществления настоящего изобретения, который приведен в качестве примера, со ссылкой на сопроводительные формулы и сопроводительные чертежи.
Как показано на Фиг.1, передаваемые сигналы, обработанные блоком 101 обработки по вычислению матрицы на стороне передачи (на стороне передатчика), на основании унитарной матрицы V, подвергают преобразованию частоты, преобразуя их в радиочастотные сигналы блоком 102 преобразования частоты на стороне передачи, который содержит гетеродин 104, смеситель 103 и смеситель 105, а затем производят их передачу из блока 106 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов.
Здесь следует отметить, что синхронизация по несущей между антеннами достигается посредством сигнала гетеродина, подаваемого из одного гетеродина 104 в смесители 103 и 105. Это является следствием ограничения, налагаемого на систему микроволновой связи между стационарными точками, основанную на мультиплексировании с пространственным разделением, состоящего в том, что детерминированные каналы определяют на основании разности фаз между трактами. Однако, как описано ниже, может быть предусмотрено наличие гетеродинов, которые предоставляются независимо для соответствующих антенн.
Переданные таким способом сигналы принимают блоком 107 стационарных антенн на стороне приема (на стороне приемника), который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов. Принятые сигналы r1 и r2 подвергают преобразованию частоты, преобразуя их в сигналы в полосе частот исходных сигналов, блоком 108 преобразования частоты на стороне приема, который содержит гетеродин 110, смеситель 109 и смеситель 111, а затем обрабатывают блоком 112 обработки по вычислению матрицы на стороне приема на основании унитарной матрицы U, завершая, тем самым, разделение/обнаружение сигналов в системе MIMO.
Здесь следует отметить, что синхронизация по несущей между антеннами достигается посредством сигнала гетеродина, подаваемого из гетеродина 110 в смесители 109 и 111. Это является следствием ограничения, налагаемого на систему микроволновой связи между стационарными точками, основанную на мультиплексировании с пространственным разделением, состоящего в том, что детерминированные каналы определяют на основании разности фаз между трактами.
В этом случае, как описано ниже, гетеродины предоставляются независимо для соответствующих антенн, как и в случае стороны передачи. Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блоки 101 и 112 обработки по вычислению матрицы могут быть реализованы посредством программного управления или могут быть созданы аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
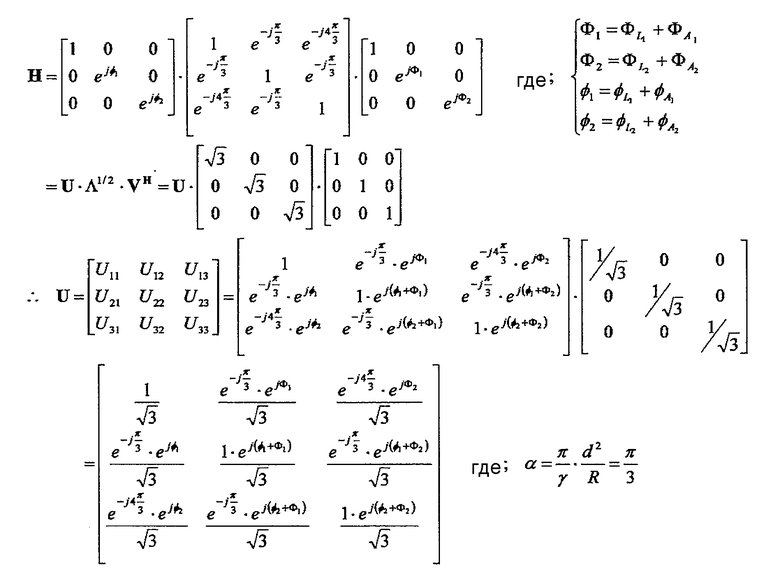
Ниже приведено описание способа вычисления унитарных матриц V и U с использованием приведенной ниже канальной матрицы H с учетом заданного расстояния, на которое разнесены антенны, и смещения высокочувствительной антенны со ссылкой на формулы.
Канальная матрица H для используемых здесь каналов, работающих в пределах прямой видимости, представлена Формулой (17).
[Формула 17]
 ,
,
где α = (при dT=dR), а Φ - изменение фазы, вызванное смещением.
(при dT=dR), а Φ - изменение фазы, вызванное смещением.
Сингулярная ортогональная матрица Λ 1/2, основанная на собственном значении, представлена формулой (18).
[Формула 18]
 .
.
Унитарную матрицу V и унитарную матрицу U вычисляют с использованием приведенной выше канальной матрицы H в упомянутом порядке.
Унитарная матрица V
Сначала приведено описание вычисления унитарной матрицы V. Предполагают, что собственный вектор, соответствующий канальной матрице H, представленной формулой (19), представлен формулой (20).
[Формула 19]
 .
.
[Формула 20]
 .
.
В этом случае удовлетворяется формула (21).
[Формула 21]
 .
.
Таким образом, из формулы (22) может быть получена формула (23).
[Формула 22]
 .
.
[Формула 23]
 .
.
Если обе стороны формулы (24) умножить на V H слева, то получается формула (25).
[Формула 24]
 .
.
[Формула 25]
 .
.
Затем собирают ортогональные "v" и получают формулу (26).
[Формула 26]
 .
.
Исходя из формулы (27) удовлетворяется формула (28).
[Формула 27]
 .
.
[Формула 28]
 .
.
Таким образом, собирают собственные векторы, каждый из которых представлен формулой (29), получая формулу (30).
[Формула 29]
 .
.
[Формула 30]
 .
.
Здесь, когда в качестве специального решения с учетом нормирования и ортогональности определена формула (31), то получают формулу (32).
[Формула 31]
 .
.
[Формула 32]
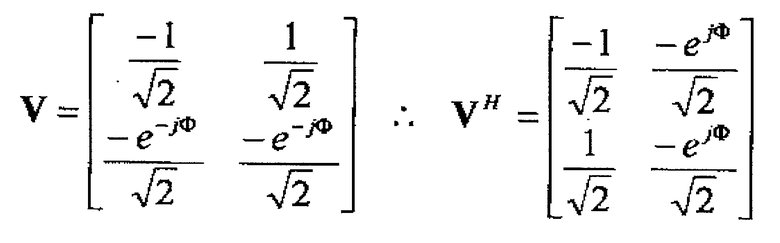 .
.
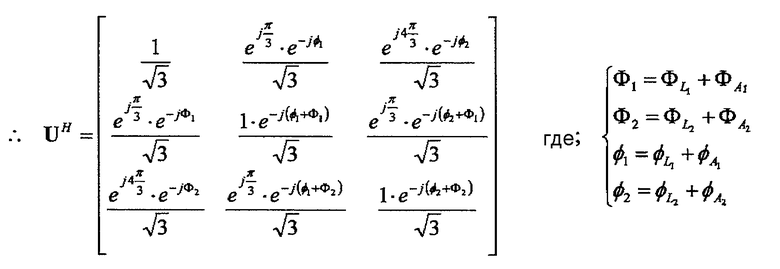
Унитарная матрица U
Ниже приведено описание вычисления унитарной матрицы U. Предполагают, что собственный вектор u представлен формулой (34) исходя из формулы (33).
[Формула 33]
 .
.
[Формула 34]
 .
.
В этом случае из формулы (35) получают формулу (36).
[Формула 35]
 .
.
[Формула 36]
 .
.
Если обе стороны формулы (37) умножить на u H слева, то получается формула (38).
[Формула 37]
 .
.
[Формула 38]
 .
.
Затем собирают ортогональные "u" и получают формулу (39).
[Формула 39]
 .
.
Таким образом, собирают собственные векторы, каждый из которых представлен формулой (40), получая формулу (41).
[Формула 40]
 .
.
[Формула 41]
 .
.
Здесь, когда в качестве специального решения с учетом нормирования и ортогональности определена формула (42), то получают формулу (43).
[Формула 42]
 .
.
[Формула 43]
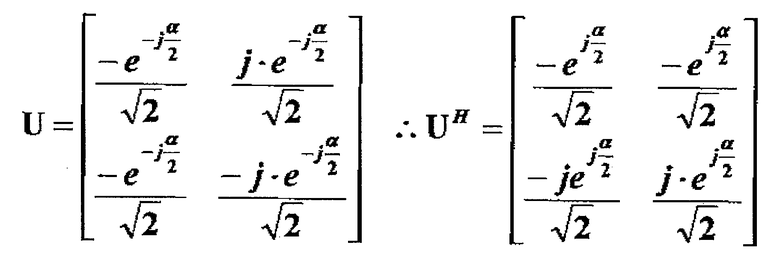 .
.
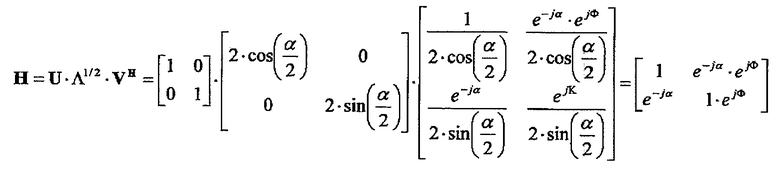
Для подтверждения правильности унитарных матриц V и U, полученных путем вышеупомянутых вычислений, выполняют сингулярное разложение канальной матрицы H на V и U.
Сингулярное разложение H = U · Λ · V H
Когда выполнено сингулярное разложение канальной матрицы H на V и U, то удовлетворяется формула (44).
[Формула 44]
 .
.
Таким образом, можно понять, что, как и в вышеупомянутом примере, имеется возможность сформировать ортогональные каналы вне зависимости от того, достигнуто ли оптимальное местоположение (R=5000 м и dT=dR=5 м) или нет. Однако в этом случае уровни качества передачи по полученным виртуальным ортогональным каналам являются пропорциональными величинам от  и до
и до  и
и  и, следовательно, отличаются друг от друга.
и, следовательно, отличаются друг от друга.
На блок-схеме из Фиг.1 показаны виртуальные ортогональные каналы, где были созданы  и
и  , обозначенные толстыми стрелками. Следует отметить, что вышеупомянутая унитарная матрица учитывает флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством Ф на Фиг.1) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит вышеупомянутое смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение. Как описано ниже, даже в конфигурации, в которой предусмотрено наличие гетеродинов, которые предоставляются независимо для соответствующих антенн, разность фаз смоделирована как флуктуация местоположения антенны. Следовательно, в конфигурации из этого примера может быть предусмотрено наличие гетеродинов, которые предоставляются независимо.
, обозначенные толстыми стрелками. Следует отметить, что вышеупомянутая унитарная матрица учитывает флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством Ф на Фиг.1) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит вышеупомянутое смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение. Как описано ниже, даже в конфигурации, в которой предусмотрено наличие гетеродинов, которые предоставляются независимо для соответствующих антенн, разность фаз смоделирована как флуктуация местоположения антенны. Следовательно, в конфигурации из этого примера может быть предусмотрено наличие гетеродинов, которые предоставляются независимо.
В этой конфигурации необходимо передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. Однако если принята конфигурация, в которой смещение компенсируют только на стороне приема, то имеется возможность устранения необходимости использования информации, передаваемой по линии обратной связи.
Выше было приведено общее описание виртуальных ортогональных каналов, в том числе, того случая, когда созданные тракты имеют различные значения ширины. Ниже рассмотрен случай сингулярной точки, когда постоянные каналы, работающие в пределах прямой видимости, имеют множество корней.
При выполнении сингулярного анализа для постоянных каналов, работающих в пределах прямой видимости, когда эти каналы являются детерминированными, существует местоположение между антеннами, в котором собственное значение является условием множественности для генерации сингулярной точки. Несмотря на то что сингулярное значение однозначно определено, сингулярные векторы не являются однозначно определенными. Это состояние (неполная матрица), которое вызывает особые затруднения с аналитической точки зрения, может вызывать существенную трансформацию собственных векторов. Однако при использовании этого явления возможны различные конфигурации. Описание различных примеров конфигураций, в которых целесообразно используют эти характеристики, приведено ниже. Но перед этим приведено описание принципа.
Здесь рассмотрено местоположение между антеннами, в котором удовлетворяется формула (46) при значении α из формулы (45).
[Формула 45]
 .
.
[Формула 46]
 .
.
Канальная матрица H в этом состоянии представлена формулой (47).
[Формула 47]
 .
.
При этом удовлетворяется формула (48).
[Формула 48]
 .
.
Таким образом, из формулы (49) следует, что уравнение для собственных значений имеет условие множественности. В этом случае возможно следующее преобразование.
[Формула 49]
Для конкретного собственного вектора u1 применительно к собственному значению λ удовлетворяет условиям формулы (50).
[Формула 50]
 .
.
Аналогичным образом, конкретный собственный вектор u2 применительно к собственному значению λ удовлетворяет условиям формулы (51).
[Формула 51]
 .
.
Следовательно, формула (52) удовлетворяется для линейной суммы обоих собственных векторов. Соответственно, линейная сумма (c1·u1 + c2·u2) становится собственным вектором.
[Формула 52]
 .
.
Предполагают, что для множественного корня установлен асимптотический собственный вектор на основании другого условия, приведенного в формуле (53).
[Формула 53]
 .
.
В этом случае исходя из формулы (54) удовлетворяется формула (55).
[Формула 54]
 .
.
[Формула 55]
 .
.
Если обе стороны формулы (56) умножить на u H слева, то получается формула (57).
[Формула 56]
 .
.
[Формула 57]
 .
.
Затем собирают ортогональные "u" и получают формулу (58).
[Формула 58]
 .
.
При этом удовлетворяется формула (59).
[Формула 59]
 .
.
Таким образом, собирают вышеупомянутые собственные векторы, представленные формулой (60), получая формулу (61), в которой учтено нормирование и ортогональность.
[Формула 60]
 .
.
[Формула 61]
 .
.
Здесь, рассматривая сумму и разность как линейную комбинацию, удовлетворяется формула (62).
[Формула 62]
 .
.
Из формулы (62) получают формулу (63).
[Формула 63]
 .
.
Кроме того, поскольку удовлетворяется формула (64), то удовлетворяется и формула (65).
[Формула 64]
 .
.
[Формула 65]
 .
.
В качестве пробной проверки, когда канальная матрица H вычислена с использованием полученных матриц U, Λ 1/2 и V H, то удовлетворяется формула (66).
[Формула 66]
 .
.
Из формулы (66) видно, что реализована канальная матрица H. Однако она приведена просто в качестве примера, и в зависимости от сингулярной точки, соответствующей множеству корней, могут быть рассмотрены различные способы разложения, основанные на том же самом подходе.
ПЕРВЫЙ ПРИМЕР
Случай, в котором вычисление матрицы выполняют только на стороне передачи
В качестве первого примера настоящего изобретения (первого примера конфигурации из настоящего изобретения) приведено описание примера конфигурации, в которой вычисление матрицы выполняют только на стороне передачи.
Сингулярная ортогональная матрица Λ 1/2
В этом случае виртуальные ортогональные каналы имеют одинаковое значение, поэтому сингулярная ортогональная матрица Λ 1/2 представлена формулой (67).
[Формула 67]
 .
.
Канальная матрица H
Таким образом, канальная матрица H представлена формулой (68).
[Формула 68]
 ,
,
где  .
.
Конфигурация, полученная на основании вышеупомянутого результата, показана на Фиг. 2. Как показано на Фиг. 2, передаваемые сигналы, обработанные блоком 201 обработки по вычислению матрицы на стороне передачи на основании унитарной матрицы V, передают из блока 202 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов, и обработка по преобразованию частоты здесь опущена во избежание усложненности.
Сигналы, переданные таким способом, принимают посредством блока 203 стационарных антенн на стороне приема, который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов, и обработка по преобразованию частоты в сигнал в полосе частот исходных сигналов здесь опущена во избежание усложненности. Обработку по вычислению матрицы на стороне приема на основании унитарной матрицы U вообще не выполняют, а все вычисления матриц выполняют на стороне передачи.
Из формулы (68) видно, что в том случае, когда вычисление матрицы выполняют только на стороне (передачи), матрица содержит флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством Φ на Фиг. 2) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение.
В этой конфигурации необходимо передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. Толстыми стрелками на Фиг. 2 обозначены виртуальные ортогональные каналы, в которых их уровни качества канала являются пропорциональными и . Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блок 201 обработки по вычислению матрицы может быть реализован посредством программного управления или может быть создан аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
ВТОРОЙ ПРИМЕР
Случай виртуальных ортогональных каналов, имеющих тракты с различными значениями ширины, в котором вычисление матрицы выполняют только на стороне передачи
В качестве второго примера настоящего изобретения (второго примера конфигурации из настоящего изобретения) приведено описание примера конфигурации, в которой вычисление матрицы выполняют только на стороне передачи для виртуальных ортогональных каналов, имеющих тракты с различными значениями ширины.
Сингулярная ортогональная матрица Λ 1/2
В этом случае виртуальные ортогональные каналы имеют различные значения, поэтому сингулярная ортогональная матрица Λ 1/2 представлена формулой (69).
[Формула 69]
 .
.
Канальная матрица H
Канальная матрица H представлена формулой (70).
[Формула 70]
 .
.
Матрица V H представлена формулой (71).
[Формула 71]
 .
.
Здесь удовлетворяется формула (72), поэтому может быть получена формула (73) для матрицы V H.
[Формула 72]
 .
.
[Формула 73]
 .
.
Здесь квадратичная норма вектора представлена формулой (74).
[Формула 74]

Таким образом, V H больше не является унитарной матрицей. Следовательно, для вычисления матрицы V требуется вычисление обратной матрицы.
В качестве пробной проверки, когда канальная матрица H вычислена с использованием полученных матриц U, Λ 1/2 и V H, то удовлетворяется формула (75).
[Формула 75]
 .
.
Из формулы (75) видно, что реализована канальная матрица H.
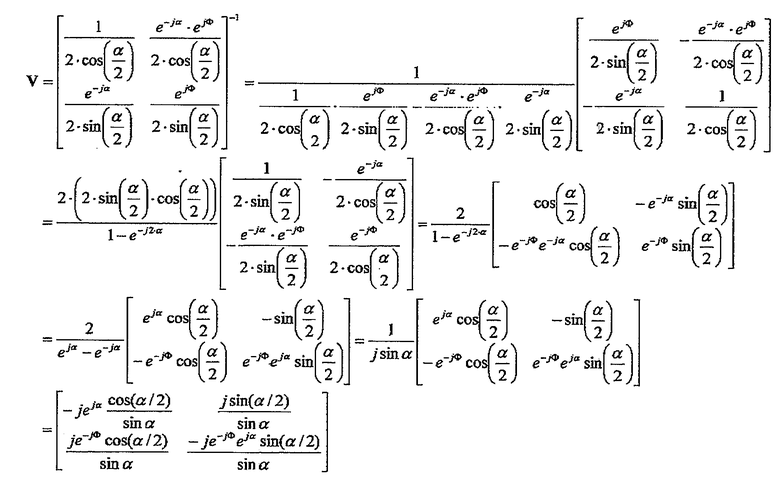
Ниже рассмотрена обратная матрица V, которая является обратной матрице V H. Предполагают, что данная матрица представлена формулой (76).
[Формула 76]
 .
.
Обратная матрица A -1, которая является обратной вышеупомянутой матрице A, представлена формулой (77).
[Формула 77]
 .
.
Следовательно, получают матрицу V согласно формуле (78).
[Формула 78]
 ,
,
где  .
.
Конфигурация, полученная на основании вышеупомянутого результата, показана на Фиг. 3.
Как показано на Фиг. 3, передаваемые сигналы, обработанные блоком 301 обработки по вычислению матрицы на стороне передачи на основании унитарной матрицы V, передают из блока 302 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов, и обработка по преобразованию частоты здесь опущена во избежание усложненности.
Сигналы, переданные таким способом, принимают посредством блока 303 стационарных антенн на стороне приема, который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов, и обработка по преобразованию частоты в сигнал в полосе частот исходных сигналов здесь опущена во избежание усложненности. Обработку по вычислению матрицы на стороне приема на основании унитарной матрицы U вообще не выполняют, а все вычисления матриц выполняют на стороне передачи.
Из формулы (78) видно, что в том случае, когда вычисление матрицы выполняют только на стороне передачи, матрица содержит флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством Φ на Фиг. 3) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит смещение в направлении высокочувствительной антенны, матрица на стороне передачи действует таким образом, что компенсирует это смещение.
В этой конфигурации необходимо передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блок 301 обработки по вычислению матрицы может быть реализован посредством программного управления или может быть создан аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
Таким образом, можно понять, что возможно сформировать виртуальные ортогональные каналы вне зависимости от того, достигнуто ли оптимальное местоположение (R = 5000 м и dT = dR =5 м) или нет, и путем выполнения обработки по вычислению матрицы только на стороне передачи.
Применение конфигурации, в которой вычисление матрицы выполняют только на стороне передачи, показано на Фиг. 20. Как показано на Фиг. 20, передающая станция 2001, расположенная около магистральной сети связи, снабжена множеством антенн, и, соответственно, в принимающих станциях 2002 и 2003, расположенных около пользовательской сети, предусмотрено наличие одной антенны. Принимающая станция 2001 и принимающая станция 2003 расположены далеко друг от друга, и, следовательно, вычисление матрицы, не может быть выполнено. С другой стороны, вычисление матрицы может выполнять передающая станция 2001. Таким образом, имеется возможность применить к конфигурации из Фиг. 20 конфигурацию, в которой вычисление матрицы выполняют только на стороне передачи. Такая концепция в конфигурации "из одной станции во множество станций" может быть применена к конфигурации "из множества станций в одну станцию", а ее описание приведено ниже как конфигурации, в которой вычисление матрицы выполняют только на стороне приема.
ТРЕТИЙ ПРИМЕР
Случай, в котором вычисление унитарной матрицы выполняют только на стороне приема и в котором гетеродины предоставляются независимо для соответствующих антенн на стороне передачи
В качестве третьего примера настоящего изобретения (третьего примера конфигурации из настоящего изобретения) приведено описание примера конфигурации, в которой вычисление унитарной матрицы выполняют только на стороне приема. Эта третья конфигурация имеет следующие отличительные признаки: отсутствует необходимость в передаче информации по линии обратной связи от стороны приема к стороне передачи; может быть предусмотрено наличие гетеродинов, которые предоставляются независимо для соответствующих антенн на стороне передачи; и могут быть продемонстрированы точно такие же характеристики, как и в способе СР.
Сингулярная ортогональная матрица Λ 1/2
В этом случае виртуальные ортогональные каналы имеют одинаковое значение, поэтому сингулярная ортогональная матрица Λ 1/2 представлена формулой (79).
[Формула 79]

Канальная матрица Н
Может быть получена канальная матрица Н, выраженная формулой (80).
[Формула 80]
Конфигурация, полученная на основании приведенного выше результата, показана на Фиг.4. Как показано на Фиг.4, обработку по вычислению матрицы на стороне передачи на основании унитарной матрицы V вообще не выполняют, а все вычисления матриц выполняют на стороне приема.
Из формулы (80) видно, что в том случае, когда вычисление матрицы выполняют только на стороне приема, эта матрица содержит флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством Ф на Фиг.4) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение.
В этой конфигурации расстояние, на которое разнесены антенны, должно быть увеличено из-за частоты, используемой в системе микроволновой связи между стационарными точками. Соответственно, вблизи антенн установлены гетеродины. То есть самым важным отличительным признаком третьей конфигурации является наличие гетеродинов, которые предоставляются независимо для соответствующих антенн на стороне передачи.
Как показано на Фиг. 4, передаваемые сигналы суммируют с контрольными сигналами соответствующих антенн посредством блока 401 генерации контрольных сигналов, подвергают преобразованию частоты, преобразуя их в радиочастотные сигналы блоком 402 преобразования частоты на стороне передачи, который содержит гетеродины 404 и 405, смесители 403 и 407, а затем передают их из блока 408 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов.
Здесь следует отметить, что гетеродины 404 и 405 используют независимо для соответствующих антенн. Таким образом, синхронизация по несущей между несущими из соответствующих антенн не обеспечивается, что приводит к генерации фазового шума ΦL. Моделирование фазового шума ΦL обозначено ссылочной позицией 406.
Сигналы, переданные таким способом, принимают посредством блока 409 стационарных антенн на стороне приема, который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов, и обработка по преобразованию частоты в сигнал в полосе частот исходных сигналов здесь опущена во избежание усложненности. Принятые сигналы r1 и r2 обрабатывают блоком 410 обработки по вычислению матрицы на стороне приема на основании унитарной матрицы U, завершая, тем самым, разделение/обнаружение сигналов в системе MIMO.
Здесь следует отметить, что обработку по вычислению матрицы на стороне передачи на основании унитарной матрицы V вообще не выполняют, а все вычисления матриц выполняют на стороне приема.
Из формулы (80) видно, что в том случае, когда вычисление матрицы выполняют только на стороне приема, матрица содержит флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством ΦА на Фиг. 4) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например ветер или температура окружающей среды. Кроме того, матрица содержит фазовый шум ΦL вследствие отсутствия синхронизации между несущими. Таким образом, даже в том случае, когда происходит смещение в направлении высокочувствительной антенны или изменение фазы между несущими, унитарная матрица действует таким образом, что компенсирует это смещение или изменение фазы.
Самым большим преимуществом третьего примера является отсутствие необходимости передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. Толстыми стрелками на Фиг. 4 обозначены виртуальные ортогональные каналы, в которых их уровни качества канала являются пропорциональными и . Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блок 401 обработки по вычислению матрицы может быть реализован посредством программного управления или может быть создан аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
Как описано выше, ортогональные каналы могут быть сформированы даже в той конфигурации, в которой вычисление унитарной матрицы не выполняют на стороне передачи. Кроме того, виртуальные ортогональные каналы могут быть сформированы даже при наличии гетеродинов, которые предоставляются независимо для соответствующих антенн на стороне передачи, если может быть обнаружена разность фаз Φ=ΦL+ΦA по контрольным сигналам. Разность фаз Φ не оказывает воздействие на сформированные таким способом ортогональные каналы. Кроме того, не требуется обратная связь от стороны приема к стороне передачи. Так как используемая матрица является унитарной матрицей, то могут быть продемонстрированы точно такие же характеристики, как и в способе СР.
ЧЕТВЕРТЫЙ ПРИМЕР
Случай, в котором вычисление унитарной матрицы выполняют только на стороне приема и в котором гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема
В качестве четвертого примера настоящего изобретения (четвертого примера конфигурации из настоящего изобретения) приведено описание примера конфигурации, в которой сформированы виртуальные ортогональные каналы, имеющие одинаковую ширину, в которой вычисление унитарной матрицы выполняют только на стороне приема и в которой гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема.
Эта четвертая конфигурация имеет следующие отличительные признаки: отсутствует необходимость в передаче информации по линии обратной связи от стороны приема к стороне передачи; гетеродины могут предоставляться независимо для соответствующих антенн на стороне передачи и на стороне приема; и могут быть продемонстрированы точно такие же характеристики, как и в способе СР. Кроме того, выполняют анализ на основании того факта, что существенный поворот фазы вследствие движения в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, может быть отнесен к тому же самому моделированию, что и поворот фазы в гетеродинах для соответствующих антенн на стороне передачи и на стороне приема. Следует отметить следующее: вышеупомянутый теоретический анализ аналитически выявляет то, что вышеупомянутое увеличение пропускной способности канала связи может быть достигнуто даже тогда, когда имеет место такое смещение в направлении высокочувствительной антенны.
Сингулярная ортогональная матрица Λ 1/2
В этом случае сингулярная ортогональная матрица Λ 1/2 представлена формулой (81).
[Формула 81]
 .
.
Канальная матрица H
Может быть получена канальная матрица H, выраженная формулой (82).
[Формула 82]
 .
.
Конфигурация, полученная на основании приведенного выше результата, показана на Фиг. 5. Как показано на Фиг. 5, обработку по вычислению матрицы на стороне передачи на основании унитарной матрицы V вообще не выполняют, а все вычисления матриц выполняют на стороне приема. В том случае когда вычисление матрицы выполняют только на стороне приема, эта матрица содержит флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством ΦA и ϕA на Фиг. 5) местоположения передающей антенны и местоположения приемной антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Таким образом, даже в том случае, когда происходит смещение в направлении высокочувствительной антенны, унитарная матрица действует таким образом, что компенсирует это смещение. В этой конфигурации расстояние, на которое разнесены антенны, должно быть увеличено из-за частоты, используемой в системе микроволновой связи между стационарными точками. Соответственно, вблизи антенн устанавливают гетеродины. То есть самым важным отличительным признаком четвертой конфигурации является наличие гетеродинов, которые предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема. Таким образом, имеется возможность получить характеристики, эквивалентные способу СР, путем надлежащего обнаружения контрольных сигналов даже в том случае, если гетеродины используются независимо для соответствующих антенн на стороне передачи и на стороне приема.
Как показано на Фиг. 5, передаваемые сигналы суммируют с контрольными сигналами соответствующих антенн посредством блока 501 генерации контрольных сигналов, подвергают преобразованию частоты, преобразуя их в радиочастотные сигналы блоком 502 преобразования частоты на стороне передачи, который содержит гетеродины 504 и 505, смесители 503 и 507, а затем их передают из блока 508 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов. Здесь следует отметить, что гетеродины 504 и 505 используют независимо для соответствующих антенн. Таким образом, синхронизация по несущей между несущими из соответствующих антенн не достигается, что приводит к генерации фазового шума ΦL. Моделирование фазового шума ΦL обозначено ссылочной позицией 506.
Сигналы, переданные таким образом, принимают посредством блока 509 стационарных антенн на стороне приема, который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов. Принятые сигналы r1 и r2 подвергают преобразованию частоты, преобразовывая их в сигналы в полосе частот исходных сигналов, блоком 510 преобразования частоты на стороне приема, который содержит гетеродины 512 и 513, смесители 511 и 515, пропускают через блок 516 обнаружения контрольных сигналов и подвергают обработке блоком 517 обработки по вычислению матрицы на стороне приема на основании унитарной матрицы U, завершая, тем самым, разделение/обнаружение сигналов в системе MIMO. Здесь следует отметить, что гетеродины 512 и 513 используют независимо для соответствующих антенн на стороне приема. Таким образом, происходит генерация фазового шума ΦL вследствие отсутствия синхронизации между несущими. Моделирование фазового шума ΦL обозначено ссылочной позицией 514. Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блок 517 обработки по вычислению матрицы может быть реализован посредством программного управления или может быть создан аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
Так как генерацию контрольных сигналов осуществляют до обработки, выполняемой гетеродинами на стороне передачи, а обнаружение контрольных сигналов выполняют после обработки, выполняемой гетеродинами на стороне приема, то блок 516 обнаружения контрольных сигналов может обнаруживать Φ=ΦL+ΦA и ϕ=ϕL+ϕA в формуле (82). Таким образом, все вычисления матрицы могут производиться только на стороне приема, при этом обработка по вычислению матрицы на стороне передачи на основании унитарной матрицы V не производится. Это обусловлено тем, что, как видно из формулы (82), унитарная матрица действует таким образом, что компенсирует флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством ΦA и ϕA на Фиг. 5) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, и фазовый шум ΦL или ϕL, вызванный отсутствием синхронизации между несущими. Самым большим преимуществом четвертого примера является отсутствие необходимости передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. Толстыми стрелками на Фиг. 5 обозначены виртуальные ортогональные каналы, в которых их уровни качества канала являются пропорциональными и .
Как описано выше, ортогональные каналы могут быть сформированы даже в той конфигурации, в которой вычисление унитарной матрицы не выполняют на стороне передачи. Кроме того, разность фаз Φ=ΦL+ΦA и ϕ=ϕL+ϕA может быть обнаружена с использованием контрольных сигналов. Таким образом, виртуальные ортогональные каналы могут быть сформированы даже в случае наличия гетеродинов, которые предоставляются независимо для соответствующих антенн на стороне передачи и/или на стороне приема. Разность фаз Φ или ϕ не оказывает воздействие на сформированные таким способом ортогональные каналы. Обратная связь от стороны приема к стороне передачи не является необходимой. Кроме того, поскольку используемая матрица является унитарной матрицей, то могут быть продемонстрированы точно такие же характеристики, как и в способе СР.
ПЯТЫЙ ПРИМЕР
Случай, в котором виртуальные ортогональные каналы имеют различные значения ширины, в котором вычисление матрицы выполняют только на стороне приема и в котором гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема
В качестве пятого примера настоящего изобретения (пятого примера конфигурации из настоящего изобретения) приведено описание примера конфигурации, в которой сформированы виртуальные ортогональные каналы, имеющие различные значения ширины, в которой вычисление матрицы выполняют только на стороне приема и в которой гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема.
Эта пятая конфигурация имеет следующие отличительные признаки: виртуальные ортогональные каналы имеют различные значения; отсутствует необходимость в передаче информации по линии обратной связи от стороны приема к стороне передачи; и гетеродины могут предоставляться независимо для соответствующих антенн на стороне передачи и на стороне приема. Кроме того, выполняют анализ на основании того факта, что поворот фазы вследствие движения в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, может быть отнесен к тому же самому моделированию, что и вращение фазы в гетеродинах, наличие которых предусмотрено для соответствующих антенн на стороне передачи и на стороне приема. Кроме того, для обеспечения гибкости расстояние, на которое разнесены антенны, установлено на основании местоположений антенны, отличных от оптимальных местоположений антенны. Следовательно, продемонстрированы характеристики, отличающиеся от способа СР. Анализ характеристик этой конфигурации описан ниже.
Сингулярная ортогональная матрица Λ 1/2
В этом случае виртуальные ортогональные каналы имеют различные значения, поэтому сингулярная ортогональная матрица Λ 1/2 представлена формулой (83).
[Формула 83]
 .
.
Канальная матрица H
Канальная матрица H представлена формулой (84).
[Формула 84]

Здесь смещение ФА высокочувствительной антенны на стороне передачи содержится в изменении ФL фазы в независимых гетеродинах на стороне передачи, которые предусмотрены для соответствующих антенн, для получения Ф, а смещение ϕА высокочувствительной антенны на стороне приема содержится в изменении ϕL фазы в независимых гетеродинах на стороне приема, которые предусмотрены для соответствующих антенн, для получения ϕ.
Здесь удовлетворяется формула (85), и, следовательно, удовлетворяется формула (86).
[Формула 85]

[Формула 86]

Кроме того, удовлетворяется формула (87), и, следовательно, удовлетворяется формула (88).
[Формула 87]
 .
.
[Формула 88]
 .
.
Однако квадратичная норма вектора представлена формулой (89).
[Формула 89]
 .
.
Таким образом, U больше не является унитарной матрицей. Следовательно, для вычисления матрицы U H необходимо вычисление обратной матрицы.
В качестве пробной проверки, когда канальная матрица H вычислена с использованием полученных матриц U, Λ 1/2 и V H, то удовлетворяется формула (90).
[Формула 90]
 .
.
Из формулы (90) видно, что реализована канальная матрица H.
Ниже рассмотрена обратная матрица U -1, которая является обратной матрице U. Предполагают, что данная матрица представлена формулой (91).
[Формула 91]
 .
.
Обратная матрица A -1, которая является обратной вышеупомянутой матрице A, представлена формулой (92).
[Формула 92]
 .
.
Следовательно, может быть получена формула (93).
[Формула 93]
 .
.
Конфигурация, полученная на основании вышеупомянутого результата, показана на Фиг. 6.
Несмотря на то что выше был описан случай виртуальных ортогональных каналов, имеющих различные значения, имеется возможность формирования ортогональных каналов путем надлежащего обнаружения контрольных сигналов даже в том случае, когда гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема. Поскольку вычисление матрицы на стороне передачи не выполняют, то возможно устранить передачу информации по линии обратной связи от стороны приема к стороне передачи и обрабатывать быстрое изменение фазы, например, с разностью Φ фаз на стороне передачи или с разностью ϕ фаз на стороне приема.
Таким образом, возможно сформировать ортогональные каналы, имеющие различное качество канала, вне зависимости от того, достигнуто ли оптимальное местоположение антенны (R = 5000 м и dT =dR =5 м) или нет, без обработки по вычислению матрицы на стороне передачи. Однако U H больше не является унитарной матрицей, а становится обратной матрицей U -1. Таким образом, ожидается ухудшение характеристик по сравнению со способом СР. Различие характеристик между способом СР и конфигурацией из этого примера описано ниже.
Как показано на Фиг. 6, передаваемые сигналы суммируют с контрольными сигналами соответствующих антенн посредством блока 601 генерации контрольных сигналов. Используемые ортогональные контрольные сигналы могут представлять собой ортогональную комбинацию, полученную из матрицы Адамара, или могут представлять собой последовательность кодов с постоянной амплитудой и нулевой автокорреляцией (CAZAC). Передаваемые сигналы, просуммированные таким способом с контрольными сигналами, подвергают преобразованию частоты, преобразуя их в радиочастотные сигналы блоком 602 преобразования частоты на стороне передачи, который содержит гетеродины 604 и 605 на стороне передачи, смесители 603 и 607, а затем их передают из блока 608 стационарных антенн, содержащего множество антенн, обозначенных как s1 и s2. Система обозначений s1 и s2 основана на эквивалентном представлении полосы частот исходных сигналов. Здесь следует отметить, что гетеродины 604 и 605 используют независимо для соответствующих антенн. Таким образом, синхронизация по несущей между несущими из соответствующих антенн не обеспечивается, что приводит к генерации фазового шума ΦL. Моделирование фазового шума ΦL обозначено позицией 606.
Сигналы, переданные таким способом, принимают посредством блока 609 стационарных антенн на стороне приема, который содержит множество антенн, обозначенных как r1 и r2. Система обозначений r1 и r2 основана на эквивалентном представлении полосы частот исходных сигналов. Принятые сигналы r1 и r2 подвергают преобразованию частоты, преобразуя их в сигналы в полосе частот исходных сигналов, блоком 610 преобразования частоты на стороне приема, который содержит гетеродины 612 и 613, смесители 611 и 615, пропускают через блок 616 обнаружения контрольных сигналов и обрабатывают блоком 617 обработки по вычислению матрицы на стороне приема на основании унитарной матрицы U, завершая, тем самым, разделение/обнаружение сигналов в системе MIMO.
При обработке на стороне приема используют независимые гетеродины 612 и 613, предусмотренные для соответствующих антенн. Таким образом, происходит генерация фазового шума ϕL из-за отсутствия синхронизации по несущей между антеннами. Моделирование фазового шума ϕL обозначено позицией 614. Отсутствуют особые ограничения на используемые антенны, и ими могут являться параболическая антенна или рупорная антенна. Блок 617 обработки по вычислению матрицы может быть реализован посредством программного управления или может быть создан аппаратными средствами, например, посредством специализированной интегральной схемы (ASIC) или аналогичного устройства.
Так как генерацию ортогональных контрольных сигналов осуществляют до обработки, выполняемой гетеродинами на стороне передачи, а обнаружение контрольных сигналов выполняют после обработки, выполняемой гетеродинами на стороне приема, то блок 616 обнаружения контрольных сигналов может обнаруживать Φ=ΦL+ΦA и ϕ=ϕL+ϕA в формуле (93). Ортогональные контрольные сигналы, используемые в ортогональной комбинации, представляют собой, например, последовательность Адамара или последовательность кодов с постоянной амплитудой и нулевой автокорреляцией (CAZAC), поэтому Φ и ϕ могут быть обнаружены с использованием простого коррелятора (который на чертеже не показан). Все вычисления матрицы могут выполняться только на стороне приема. То есть, как видно из формулы (93), матрица на стороне приема действует таким образом, что компенсирует флуктуацию между каналами, вызванную внешними факторами, например флуктуацию (смоделированную посредством ΦA и ϕA на Фиг. 6) местоположения антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, и фазовый шум ΦL или ϕL, вызванный отсутствием синхронизации между несущими.
Самым большим преимуществом четвертого примера является отсутствие необходимости передавать информацию для построения матрицы V по линии обратной связи от стороны приема к стороне передачи. В отличие от четвертого примера толстыми стрелками на Фиг. 6 обозначены виртуальные ортогональные каналы, имеющие различные значения ширины. Однако, как описано ниже, в этой конфигурации виртуальные ортогональные каналы имеют одинаковое качество канала.
Хотя выше был описан случай, в котором используют две антенны, настоящее изобретение не ограничено этим вариантом, возможны конфигурации, в которых используют три или более антенн.
Ниже приведено описание случая, в котором используют три или более антенн. Для упрощения проиллюстрированы только лишь антенны на стороне передачи/на стороне приема.
ШЕСТОЙ ПРИМЕР
Случай, в котором используют три антенны и в котором вычисление унитарной матрицы выполняют только на стороне приема
Ниже приведено описание шестого примера настоящего изобретения (шестого примера конфигурации из настоящего изобретения), а именно примера конфигурации, в котором используют три антенны.
Сингулярная ортогональная матрица Λ 1/2
В этом случае сингулярная ортогональная матрица Λ 1/2 представлена формулой (94).
[Формула 94]
 .
.
Канальная матрица H
На основании Фиг. 7 получают формулу (95), и канальная матрица H может быть представлена формулой (96).
[Формула 95]
 .
.
[Формула 96]
 .
.
Таким образом, может быть получена формула (97).
[Формула 97]
 .
.
Каждый из параметров ΦA и ϕA в формуле (97) представляет собой поворот фазы несущей, вызванный флуктуацией антенн на стороне передачи/на стороне приема, которые имеют высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Нижние индексы 1 и 2 отображают отклонение местоположения второй и третьей антенн при отсчете от самых верхних антенн.
Кроме того, расстояние, на которое разнесены антенны, должно быть увеличено из-за частоты, используемой в системе микроволновой связи между стационарными точками. Соответственно, вблизи антенн установлены гетеродины. То есть гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема. Соответственно, возникает фазовый шум ΦL или ϕL, вызванный отсутствием синхронизации между несущими. Нижние индексы 1 и 2 отображают отклонение местоположения второй и третьей антенн при отсчете от самых верхних антенн.
Существенный поворот фазы вследствие движения в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, может быть сведен к тому же самому моделированию, что и вращение фазы в гетеродинах, предусмотренных для соответствующих антенн на стороне передачи и на стороне приема. Таким образом, анализ на основании формулы 97 выявляет, что удовлетворяются условия Φ1=ΦL1+ΦA1 и Φ2=ΦL2+ΦA2 для второй и третьей антенн на стороне передачи при отсчете от самой верхней антенны и что удовлетворяются условия ϕ1=ϕL1+ϕA1 и ϕ2=ϕL2+ϕA2 для второй и третьей антенн на стороне приема при отсчете от самой верхней антенны. То есть виртуальные ортогональные каналы могут быть сформированы путем вычисления унитарной матрицы только на стороне приема, даже в той конфигурации, в которой используют три антенны. Толстыми стрелками на Фиг. 7 обозначены виртуальные ортогональные каналы, в которых их качество канала является пропорциональным  , и .
, и .
Кроме того, имеется возможность получить характеристики, эквивалентные способу СР, путем соответствующего обнаружения поворота фазы с использованием контрольных сигналов. Пропускная способность канала связи становится в три раза более высокой, чем общая мощность, поданная во все антенны.
СЕДЬМОЙ ПРИМЕР
Случай, в котором используют четыре антенны, в котором вычисление унитарной матрицы выполняют только на стороне приема и в котором гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема.
Ниже приведено описание седьмого примера настоящего изобретения (седьмого примера конфигурации из настоящего изобретения), а именно примера конфигурации, в котором используют четыре антенны.
Сингулярная ортогональная матрица Λ 1/2
В этом случае сингулярная ортогональная матрица Λ 1/2 представлена формулой (98).
[Формула 98]
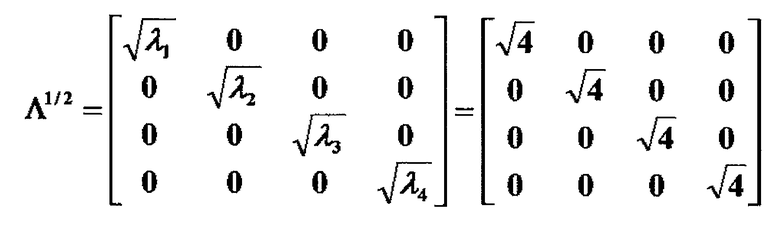 .
.
Канальная матрица H
На основании Фиг. 8 получают формулу (99), и канальная матрица H может быть представлена формулой (100).
[Формула 99]
 .
.
[Формула 100]
 .
.
Таким образом, может быть получена формула (101).
[Формула 101]
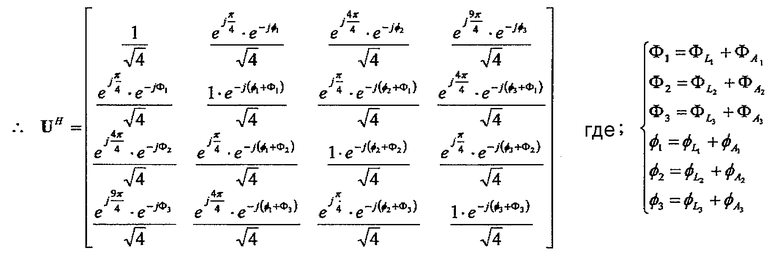 .
.
Каждый из параметров ΦA и ϕA в формуле (101) представляет собой поворот фазы несущей, вызванный флуктуацией антенн на стороне передачи/на стороне приема, которые имеют высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Нижние индексы 1, 2 и 3 отображают отклонение местоположения второй, третьей и четвертой антенн при отсчете от самых верхних антенн.
Расстояние, на которое разнесены антенны, должно быть увеличено из-за частоты, используемой в системе микроволновой связи между стационарными точками. Соответственно, вблизи антенн установлены гетеродины, предоставленные независимо для соответствующих антенн на стороне передачи и на стороне приема. Соответственно, возникает фазовый шум ΦL или ϕL, вызванный отсутствием синхронизации между несущими. Нижние индексы 1, 2 и 3 отображают отклонение местоположения второй, третьей и четвертой антенн при отсчете от самых верхних антенн.
Существенный поворот фазы вследствие движения в направлении антенны, имеющей высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды, может быть сведен к тому же самому моделированию, что и вращение фазы в гетеродинах, предусмотренных для соответствующих антенн на стороне передачи и на стороне приема. Таким образом, анализ на основании формулы 101 выявляет, что удовлетворяются условия Φ1=ΦL1+ΦA1, Φ2=ΦL2+ΦA2 и Φ3=ΦL3+ΦA3 для второй, третьей и четвертой антенн на стороне передачи при отсчете от самой верхней антенны и удовлетворяются условия ϕ1=ϕL1+ϕA1, ϕ2=ϕL2+ϕA2 и ϕ3=ϕL3+ϕA3 для второй, третьей и четвертой антенн на стороне приема при отсчете от самой верхней антенны. То есть виртуальные ортогональные каналы могут быть сформированы путем вычисления унитарной матрицы только на стороне приема даже в той конфигурации, в которой используют четыре антенны. Толстыми стрелками на Фиг. 8 обозначены виртуальные ортогональные каналы, в которых их качество канала является пропорциональным  , , и .
, , и .
Кроме того, имеется возможность получить характеристики, эквивалентные способу СР, путем соответствующего обнаружения поворота фазы с использованием контрольных сигналов. Пропускная способность канала связи становится в четыре раза более высокой, чем общая мощность, поданная во все антенны.
Ниже приведено описание случая, в котором используют произвольное количество антенн, для соответствующих случаев, когда вычисление матрицы выполняют только на стороне передачи, только на стороне приема и на обеих сторонах: на стороне передачи и на стороне приема.
Конфигурация, в которой используют произвольное количество антенн, равное N (общее решение)
Рассмотрена конфигурация, в которой используют произвольное количество антенн, равное N, используя произвольное число N антенн.
Сингулярная ортогональная матрица Λ 1/2
В этом случае сингулярная ортогональная матрица Λ 1/2 представлена формулой (102).
[Формула 102]
Канальная матрица H
На основании формулы (103) идеальная канальная матрица для каналов, работающих в пределах прямой видимости, в которых отсутствует вращение фазы на стороне передачи и на стороне приема, представлена как канальная матрица H формулой (104).
[Формула 103]
 .
.
[Формула 104]
 .
.
Матрица T вращения фазы на стороне передачи определяется формулой (105).
[Формула 105]
 .
.
Аналогичным образом, матрица W вращения фазы на стороне приема определяется формулой (106).
[Формула 106]
 .
.
При этом удовлетворяются формулы (107) и (108).
[Формула 107]
 .
.
[Формула 108]
 .
.
Каждый из параметров ΦA и ϕA в формуле (101) представляет собой поворот фазы несущей, вызванный флуктуацией антенн на стороне передачи/на стороне приема, которые имеют высокую чувствительность к малозаметному изменению погодных условий, таких как, например, ветер или температура окружающей среды. Параметры ΦL или ϕL представляют собой изменение фазы, вызванное отсутствием синхронизации между несущими. Каждый из нижних индексов отображает порядок следования антенн при отсчете от самых верхних антенн.
Таким образом, реальная канальная матрица для каналов, работающих в пределах прямой видимости, где вращение фазы присутствует на обеих сторонах: на стороне передачи и на стороне приема, представлена формулой (109).
[Формула 109]
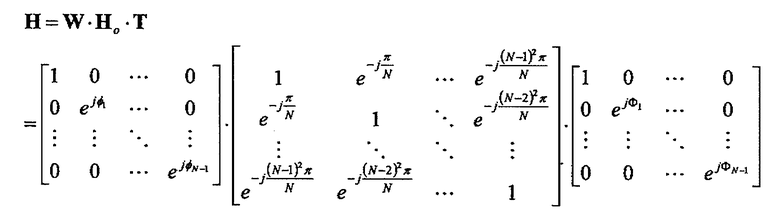 .
.
Случай, в котором вычисление унитарной матрицы выполняют только на стороне приема
В этом случае удовлетворяется формула (110) и, следовательно, удовлетворяется формула (111).
[Формула 110]
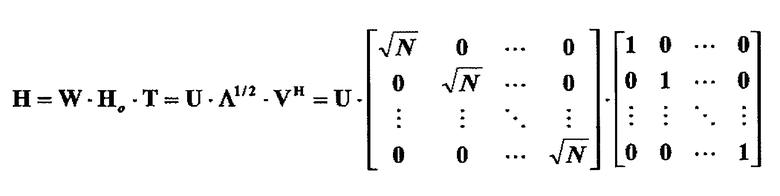 .
.
[Формула 111]
 .
.
Следовательно, получают формулу (112).
[Формула 112]
 .
.
То есть даже в той конфигурации, в которой используют произвольное количество антенн, равное N, виртуальные ортогональные каналы могут быть сформированы путем вычисления матрицы только на стороне приема даже в том случае, когда гетеродины предоставляются независимо для соответствующих антенн и когда происходит смещение в направлении высокочувствительной антенны.
Попутно удовлетворяется формула (113).
[Формула 113]
 .
.
При этом удовлетворяется формула (114).
[Формула 114]
 .
.
Когда N является четным числом, то произвольный вектор-столбец или произвольный вектор-строка представляют собой вектор, полученный путем циклического сдвига последовательности (Chu), и значения его автокорреляции (E[a·a*]) являются ортогональными друг другу. Когда N является нечетным числом, то циклический сдвиг не возникает. Однако из приведенного ниже описания понятно, что ортогональная зависимость была установлена.
Случай, в котором вычисление унитарной матрицы выполняют только на стороне передачи.
В этом случае удовлетворяется формула (115) и, следовательно, удовлетворяется формула (116).
[Формула 115]
[Формула 116]
Следовательно, получают формулу (117).
[Формула 117]
То есть даже в конфигурации, в которой используют произвольное количество антенн, равное N, виртуальные ортогональные каналы могут быть сформированы путем обработки по вычислению матрицы V только на стороне передачи даже в том случае, когда гетеродины предоставляются независимо для соответствующих антенн и когда происходит смещение в направлении высокочувствительной антенны.
Случай, в котором вычисление унитарной матрицы выполняют на на стороне передачи и на стороне приема.
Сингулярная ортогональная матрица Λ 1/2
В этом случае сингулярная ортогональная матрица Λ 1/2 представлена формулой (118).
[Формула 118]
 .
.
Следовательно, удовлетворяется формула (119).
[Формула 119]
 .
.
Когда в качестве матрицы V используют произвольную унитарную матрицу, то получают формулу (120).
[Формула 120]
 .
.
Попутно удовлетворяется формула (121).
[Формула 121]
 .
.
Таким образом, U становится унитарной матрицей даже в том случае, когда в качестве матрицы V используют произвольную унитарную матрицу.
Таким образом, получают формулу (122).
[Формула 122]
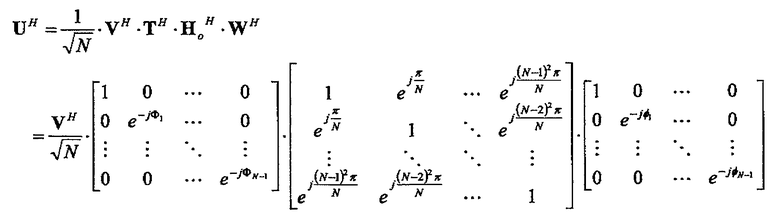 .
.
То есть даже тогда, когда используют произвольное количество N антенн в конфигурации, в которой унитарную матрицу используют на стороне передачи и на стороне приема, виртуальные ортогональные каналы могут быть сформированы путем вычисления матрицы только на стороне приема, даже в том случае, когда гетеродины предоставляются независимо для соответствующих антенн и когда происходит смещение в направлении высокочувствительной антенны.
Неизменной матрицей V передачи здесь может являться любая матрица при условии, что она является унитарной матрицей, и вычисление унитарной матрицы на стороне приема, представленное формулой (123), действует таким образом, что компенсирует флуктуацию, вызванную гетеродинами или вследствие смещения антенн.
[Формула 123]
 .
.
Пример
В качестве простого примера приведенную выше формулу применяют к конфигурации, в которой используют две антенны. В качестве неизменной произвольной матрицы передачи выбрана матрица, представленная формулой (124).
[Формула 124]
 .
.
Здесь удовлетворяется формула (125) и, следовательно, удовлетворяется формула (126).
[Формула 125]
 .
.
[Формула 126]
 .
.
Ниже приведено описание ортогональной зависимости, используемой в формуле (114).
Здесь в формуле (127) вычисляют произведение m произвольных векторов-строк и n произвольных векторов-столбцов.
[Формула 127]
 .
.
Когда m<n, то удовлетворяется формула (128).
[Формула 128]
 .
.
При этом, предполагая, что удовлетворяется формула (129), удовлетворяется формула (130).
[Формула 129]
 .
.
[Формула 130]
 .
.
Таким образом, установлена ортогональная зависимость.
Когда m>n, то удовлетворяется формула (131).
[Формула 131]
 .
.
Аналогичным образом, удовлетворяется формула (132).
[Формула 132]
 .
.
Таким образом, установлена ортогональная зависимость.
Исходя из описанного выше удовлетворяется формула (133).
[Формула 133]
 .
.
Выше было приведено описание конфигурации, в которой используют множество антенн, в которой происходит смещение в направлении высокочувствительной антенны, в которой фазовый шум, вызванный отсутствием синхронизации между несущими, компенсируют только посредством унитарной матрицы на стороне приема и в которой пропускная способность системы связи становится кратной количеству антенн.
Ниже приведено описание характеристик в состоянии, в котором не установлено идеальное расстояние, на которое разнесены антенны, то есть в котором виртуальные ортогональные каналы имеют различные значения ширины. В качестве примера использован пятый пример конфигурации.
Анализ характеристик в способе СР на основании постоянных каналов, работающих в пределах прямой видимости, и в предложенном пятом примере конфигурации
Случай, в котором виртуальные ортогональные каналы имеют различные значения ширины, в котором вычисление матрицы выполняют только на стороне приема и в котором гетеродины предоставляются независимо для соответствующих антенн на стороне передачи и на стороне приема.
Анализ характеристик выполняют для пятого примера конфигурации, в котором для обеспечения гибкости расстояние, на которое разнесены антенны, установлено на основании местоположений антенн, отличающихся от оптимальных местоположений антенн, путем их сравнения со способом СР.
Во-первых, со ссылкой на пятый пример конфигурации, предполагая, что вектор принятого сигнала равен r, вектор сигнала после вычисления матрицы на стороне приема представлен формулой (134).
[Формула 134]
 .
.
В приведенной выше формуле вектор передаваемого сигнала обозначен как S, а вектор шума обозначен как n.
Кроме того, исходя из пятого примера конфигурации удовлетворяется формула (135).
[Формула 135]
 .
.
Таким образом, вектор S передачи и вектор n шума установлены согласно формуле (136).
[Формула 136]
 .
.
Далее для сравнения с использованием относительных величин применяют нормировку, получая формулу (137).
[Формула 137]
 .
.
Таким образом, ОСШ1 (отношение сигнал-шум)1 канала λ1 представлено формулой (138).
[Формула 138]
 .
.
Аналогичным образом, ОСШ2 канала λ2 представлено формулой (139).
[Формула 139]
 .
.
Таким образом, хотя ортогональные каналы имеют различные значения ширины, равные λ1=2+2cosα и λ2=2-2cosα, оба отношения сигнал-шум: ОСШ1 и ОСШ2 становятся равными sin2α.
Способ СР
Для сравнения с пятым примером конфигурации выполняют анализ характеристик способа СР.
Во-первых, исходя из схемы конфигурации из Фиг. 1 вектор принятого сигнала после вычисления унитарной матрицы согласно способу СР представлен формулой (140).
[Формула 140]
 .
.
В этом случае исходя из Формулы (43) удовлетворяется формула (141).
[Формула 141]
 .
.
Таким образом, ОСШ1 канала λ1 после нормировки представлено формулой (142).
[Формула 142]
 .
.
Аналогичным образом, ОСШ2 канала λ2 представлено формулой (143).
[Формула 143]
 .
.
Таким образом, значения ширины ортогональных каналов являются пропорционально равными λ1=2+2cosα и λ2=2-2cosα и, соответственно, ОСШ1 и ОСШ2 становятся равными соответственно 1+cosα и 1-cosα.
Сравнение между величинами ОСШ ортогональных каналов на основании соответствующих способов с точки зрения расстояния, на которое разнесены антенны
Когда результаты анализа характеристик для пятого примера конфигурации и для способа СР сравнивают друг с другом с точки зрения значений dT и dR расстояния, на которое разнесены антенны, то получают график, показанный на Фиг. 9.
Предложенный способ демонстрирует то же самое значение ОСШ между ортогональными каналами λ1 и λ2, и, следовательно, можно понять, что флуктуация относительно расстояния, на которое разнесены антенны, мала.
Для достижения практичной и гибкой конфигурации был проведен анализ с предположением, что обработку по вычислению матрицы выполняют только на стороне приема, для устранения необходимости использования информации, передаваемой по линии обратной связи к стороне передачи, в конфигурации, отличающейся от той конфигурации, в которой существует местоположение между антеннами, в котором собственное значение является условием множественности для генерации сингулярной точки.
Мощность сигнала после вычисления матрицы на стороне приема является пропорциональной собственному значению как в предложенном способе, так и в способе СР. В случае способа СР вычисление матрицы на стороне приема выполняют на основании унитарной матрицы, вследствие чего мощность шума не изменяется, а сохраняет постоянное значение даже в том случае, если собственное значение изменяется. Следовательно, значения ОСШ соответствующих трактов в способе ОСШ становятся равными различным значениям, которые являются пропорциональными собственному значению и изменяются в соответствии с расстоянием, на которое разнесены антенны. С другой стороны, в предложенном способе вычисление матрицы на стороне приема производят не на основании унитарной матрицы, поэтому мощность шума изменяется в соответствии с собственным значением. Таким образом, результат анализа из Фиг. 9 выявляет следующее: несмотря на то что мощность сигнала имеет высокую мощность и низкую мощность пропорционально собственному значению, ОСШ соответствующих трактов всегда имеет одинаковое значение и изменяется в соответствии с расстоянием, на которое разнесены антенны, в этой же самой пропорции.
Таким образом, в предложенном способе ОСШ виртуального ортогонального канала не изменяется даже тогда, когда изменяется расстояние, на которое разнесены антенны, и если такое изменение имеет место, то величина изменения является малой, поэтому можно сказать, что предложенный способ является более практичным и более простым в использовании, чем способ СР.
Содержание теоретического анализа с предположением о том, что гетеродины предоставляются независимо для соответствующих антенн, может быть сведено к тому же самому моделированию также применительно к движению в направлении высокочувствительной антенны, что, следовательно, полностью охватывает влияние, оказываемое малозаметным изменением погодных условий, например ветром.
Ниже приведено описание компоновки с учетом реальных мест установки. Вероятно, трудно обеспечить место установки антенн ближе к стороне, на которой находится пользователь. С другой стороны, более вероятно следующее: проще обеспечить места установки антенн на стороне магистральной сети связи напротив стороны, на которой находится пользователь. Ниже приведено описание конфигурации, показанной на Фиг. 10, в которой значения расстояния, на которое разнесены антенны, отличаются друг от друга на стороне передачи и на стороне приема.
Для выполнения описанного ниже анализа используется чертеж Фиг. 11, который получен путем моделирования нижней половины вертикально симметричной конфигурации из Фиг. 10.
Потери при распространении и общий сдвиг фазы с учетом расстояния R от передатчика до приемника не являются существенными, поэтому эти члены игнорируются. В приведенном ниже изложении R установлено в качестве репера. В этом случае разность каналов для диагонального канала под углом Δθ1 относительно R представлена формулой (144).
[Формула 144]
 .
.
Аналогичным образом, разность каналов для диагонального канала под углом Δθ2 относительно R представлена формулой (145).
[Формула 145]
 .
.
Угол α поворота фазы, полученный на основании разности каналов между двумя волнами в точках приема, представлен формулой (146).
[Формула 146]
 .
.
Попутно, предполагая, что радиочастота = 30 ГГц, R = 2000 м, dT = 5 м и dR = 2 м, удовлетворяется формула (147).
[Формула 147]
 .
.
С учетом сдвига фазы Φ, вызванного флуктуацией местоположения передающей антенны, предназначенной для передачи сигнала s2, канальная матрица H, нормированная на диагональный канал под углом Δθ1, представлена формулой (148).
[Формула 148]
 .
.
Таким образом, продемонстрировано то же самое условие, что и полученные до сих пор результаты.
Кроме того, из формулы (149) получают формулу (150).
[Формула 149]
 .
.
[Формула 150]
 .
.
График, демонстрирующий этот результат, показан на Фиг. 12.
Когда из приведенного выше результата построена формула (151), то получают тот же самый результат, что и результаты, полученные до сих пор.
[Формула 151]
 .
.
Таким образом, понятно, что предложенный способ может быть использован без видоизменения.
Ниже приведено описание случая, в котором между передающей и приемной антеннами происходит отклонение от заданного положения в направлении схемы расположения антенн, имеющее ромбовидную форму.
На Фиг. 13, как и в вышеупомянутом случае, в качестве репера установлено R. Тогда, в случае d11 разность каналов для диагонального канала относительно R представлена формулой (152).
[Формула 152]
 .
.
Аналогичным образом, в случае d12 разность каналов для диагонального канала относительно R представлена формулой (153).
[Формула 153]
 .
.
Аналогичным образом, в случае d21 разность каналов для диагонального канала относительно R представлена формулой (154).
[Формула 154]
 .
.
Аналогичным образом, в случае d22 разность каналов для диагонального канала относительно R представлена формулой (155).
[Формула 155]
 .
.
Предполагают, что поворот фазы, полученный на основании разности каналов, представлен формулой (156).
[Формула 156]
 .
.
В этом случае канальная матрица H, нормированная на канал d11, представлена формулой (157).
[Формула 157]
 .
.
Таким образом, удовлетворяется формула (158).
[Формула 158]
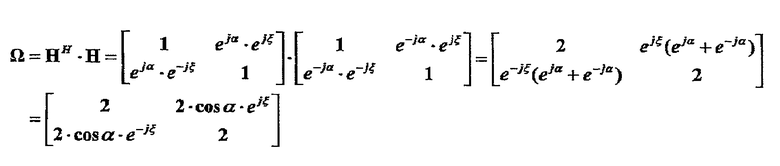 .
.
Из формулы (158) получают формулу (159).
[Формула 159]
 .
.
Таким образом, понятно, что даже в том случае, когда происходит отклонение от заданного положения, имеющее ромбовидную форму, это не оказывает какое-либо влияние на собственные значения, соответствующие значениям ширины соответствующих трактов.
Сингулярное разложение H = U ·Λ 1/2 V H
Сингулярное разложение канальной матрицы H представлено формулой (160).
[Формула 160]
 .
.
Кроме того, U и V представлены формулой (161).
[Формула 161]
 .
.
Таким образом, понятно, что достигнуто сингулярное разложение H на унитарные матрицы U и V.
То есть даже в том случае, когда происходит отклонение от заданного положения, имеющего ромбовидную форму, собственные значения, соответствующие значениям ширины соответствующих трактов перед тем, как произошло отклонение от заданного положения, могут быть сохранены, и достигнуто сингулярное разложение канальной матрицы H на унитарные матрицы U и V. Само собой разумеется, что та же самая конфигурация, которая описана выше, может быть получена даже в том случае, если имеется сдвиг Φ фазы, вызванный флуктуацией местоположения передающей антенны.
Ниже приведено описание того, каким образом предложенная конфигурация, в которой вычисление матрицы выполняют только на стороне приема, функционирует в том случае, когда происходит такое отклонение от заданного положения, имеющее ромбовидную форму.
Случай, в котором вычисление матрицы выполняют только на стороне приема и в котором схема расположения антенн между сторонами передачи/приема сформирована имеющей ромбовидную форму
Ниже описан случай, в котором происходит отклонение от заданного положения, имеющего ромбовидную форму, в направлении антенного устройства между передающими и приемными антеннами в конфигурации согласно настоящему изобретению, в которой вычисление матрицы выполняют только на стороне приема. Здесь ромбовидную канальную матрицу H, полученную при вышеизложенном анализе, используют без видоизменения.
Сингулярная ортогональная матрица Λ 1/2
Из Фиг. 14, рассматривая местоположение между антеннами, в котором выполняется условие ejα=j, сингулярная ортогональная матрица Λ 1/2 представлена формулой (162).
[Формула 162]
 .
.
Канальная матрица H
Кроме того, канальная матрица H представлена формулой (163)
[Формула 163]
 .
.
При этом удовлетворяется формула (164).
[Формула 164]
 .
.
Таким образом, конфигурация, в которой вычисление унитарной матрицы выполняют только на стороне приема, действует даже в том случае, когда происходит отклонение от заданного положения, имеющее ромбовидную форму. Следует отметить, что та же самая конфигурация, как и описанная выше, может быть получена даже в том случае, когда имеет место сдвиг Φ или ϕ фазы, вызванный гетеродинами или являющийся следствием смещения антенны.
Случай, в котором форма схемы расположения антенн между сторонами передачи/приема обобщена в еще большей степени
Приведено описание случая, в котором форма схемы расположения антенн между стороной передачи и стороной приема обобщена в еще большей степени. Этот случай является примером применения, в том числе, для беспроводной локальной сети или аналогичной сети, созданной в системе связи в пределах прямой видимости, которая имеет высокую гибкость места установки.
Исходя из Фиг. 15 d11, d12, d21 и d22 представлены формулой (165).
[Формула 165]
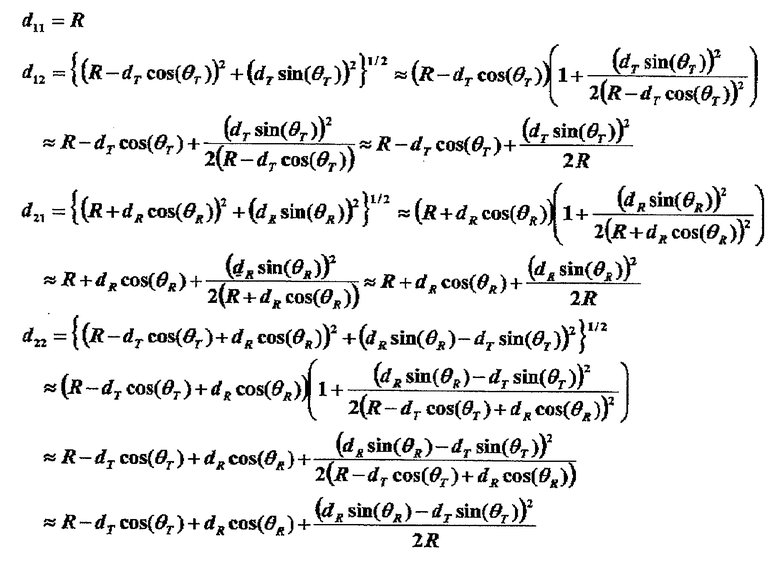 .
.
Кроме того, исходя из Фиг. 15 канальная матрица H, в которой внимание сосредоточено только на разности фаз между приемными антеннами, представлена формулой (166).
[Формула 166]
 .
.
Исходя из канальной матрицы H из формулы (166) удовлетворяется формула (167).
[Формула 167]
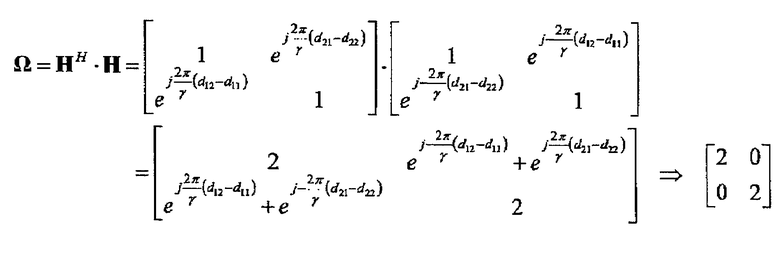 .
.
Таким образом, для того чтобы собственное значение являлось условием множественности, необходимо только то, чтобы первый член, то есть формула (168), и второй член, то есть формула (169), имели обратные фазы относительно друг друга.
[Формула 168]
 .
.
[Формула 169]
 .
.
То есть необходимо только то, чтобы удовлетворялась формула (170).
[Формула 170]
 .
.
В альтернативном варианте, предполагая, что разность между первым и вторым членами равна π, необходимо только то, чтобы удовлетворялась формула (171).
[Формула 171]
 .
.
Таким образом, получают формулу (172).
[Формула 172]
 .
.
Когда полученной зависимости присвоены d11-d22, то удовлетворяется формула (173), и, тем самым, получают формулу (174).
[Формула 173]
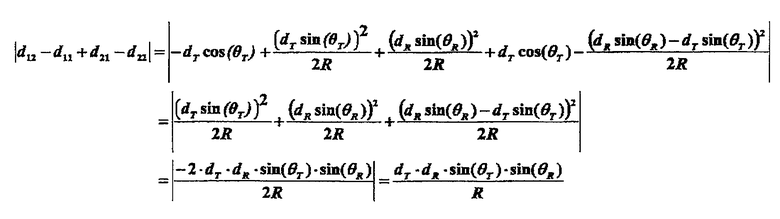 .
.
[Формула 174]
 .
.
Таким образом, в качестве условия того, что собственное значение становится условием множественности, получают формулу (175).
[Формула 175]
 .
.
При наличии трактов, имеющих одинаковую ширину, возможна иная конфигурация антенн в том случае, если удовлетворяется вышеупомянутое условие. Следует отметить, что определения используемого здесь R (второго R) и вышеупомянутого R (первого R) немного отличаются друг от друга. То есть передающая и приемная антенны на Фиг. 15 не расположены параллельно друг другу, поэтому расстояние, на которое разнесены антенны, между стороной передачи и стороной приема, установлено равным второму R, которое соответствует d11 между элементами передающей и приемной антенн, расположенными снизу (см. [Формула 165]). С другой стороны, в других конфигурациях, когда передающая и приемная антенны расположены параллельно друг другу, расстояние, на которое разнесены антенны, между стороной передачи и стороной приема, устанавливают равным первому R.
В приведенном выше описании в качестве средства обнаружения для обнаружения флуктуации местоположения антенны или флуктуации каналов, вызванной внешними факторами или изменением фазы, вызванным использованием гетеродинов, которые предоставляются независимо для соответствующих антенн, используют контрольные сигналы. Однако вышеупомянутые флуктуации могут быть обнаружены посредством конфигурации без использования контрольных сигналов. Например, может быть использован способ, в котором используют данные для передачи информации. Кроме того, хотя это и не показано, может быть использован способ, в котором оценку изменения фазы производят с использованием результата определения после выравнивающей коррекции, или способ, в котором оценку изменения фазы производят путем повторного кодирования сигнала после исправления ошибок. Ниже приведено описание способа, в котором вышеупомянутые флуктуации обнаруживают без использования контрольных сигналов, при этом в качестве примера взят случай, в котором используют две антенны.
Здесь приведено описание, в котором используют вышеописанную канальную матрицу, то есть канальную матрицу, представленную формулой (176).
[Формула 176]
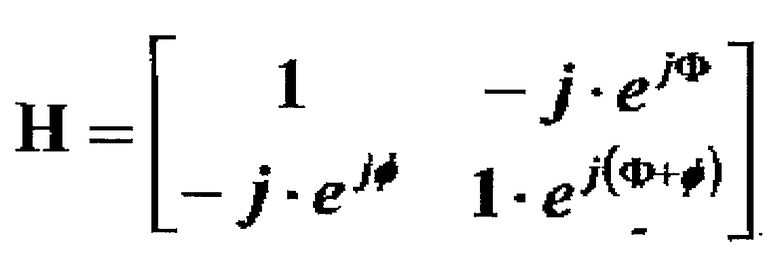 .
.
Во-первых, предполагают, что векторы передаваемого и принятого сигнала представлены формулой (177).
[Формула 177]
 .
.
В этом случае может быть получена формула (178).
[Формула 178]
 .
.
Предполагая, что s1 и s2 в приведенной выше формуле были получены надлежащим образом из результата определения после выравнивающей коррекции или воспроизведения сигнала после исправления ошибок, из формулы (179) получают формулу (180).
[Формула 179]
 .
.
[Формула 180]
Исходя из этого может быть обнаружено Φ.
Затем используют обнаруженное ϕ. Перед этим исходя из формулы (178) удовлетворяется формула (181).
[Формула 181]
 .
.
Таким образом, получают формулу (182) и, следовательно, может быть обнаружено ϕ.
[Формула 182]
 .
.
Как описано выше, имеется возможность обнаружения флуктуации в антеннах или в каналах, вызванной внешними факторами, или изменения фазы, вызванного использованием гетеродинов, которые предоставляются независимо для соответствующих антенн, не с использованием контрольного сигнала, а с использованием данных, передающих информацию. В приведенном выше примере было описано функционирование после начальной обработки. То есть после того, как начальная обработка завершена, поток данных передают постоянно, поэтому обнаружение изменения фазы выполняют постоянно.
На основании приведенных выше результатов ниже приведено описание примера, в котором способ из настоящего изобретения применяют для иных каналов, чем каналы устройства микроволновой связи.
На Фиг. 16 показан пример, в котором в качестве детерминированных каналов используют оптические каналы. Как показано на Фиг. 16, в качестве оптической антенны используют лазерный диод (ЛД) 1601 и фотоприемник (ФП) 1602 соответственно на стороне передачи и на стороне приема. Система MIMO, работающая в пределах прямой видимости, также может быть реализована с использованием этой конфигурации, как и в случае системы MIMO, работающей в пределах прямой видимости, в которой используют электрические волны.
На Фиг. 17 показан пример, в котором в качестве детерминированных каналов используют акустооптические каналы. Как показано на Фиг. 17, используют генератор 1701 ультразвуковых волн и ультразвуковой микрофон 1702 соответственно на стороне передачи и на стороне приема. Система MIMO, работающая в пределах прямой видимости, также может быть реализована с использованием этой конфигурации, как и в случае системы MIMO, работающей в пределах прямой видимости, в которой используют электрические волны.
На Фиг. 18 показан пример антенны MIMO, используемой в каналах, работающих в пределах прямой видимости, например, в простой радиоаппаратуре (в том числе, в беспроводной локальной сети), используемой в качестве детерминированных каналов. В отличие от системы микроволновой связи между стационарными точками, имеющей регулярную структуру, простая радиоаппаратура имеет каналы, работающие в пределах прямой видимости, которые имеют сложную структуру. Имеется возможность повысить пропускную способность в системе связи MIMO, работающей в пределах прямой видимости, в том случае, если удовлетворяется условие из формулы 175, вне зависимости от типа геометрической формы каналов, работающих в пределах прямой видимости.
Антенна MIMO из Фиг. 18 имеет конфигурацию, в которой расстояние (d), на которое разнесены антенны, между элементами 1801 и 1802 антенны может быть легко изменено посредством соединительной шины 1803. Кроме того, угол (θ) между элементами 1801 и 1802 антенны может быть легко отрегулирован посредством шарнира 1804.
Полученная формула (175) отражает возможность достижения максимальной пропускной способности системы связи путем регулирования значений dT и dR расстояния, на которое разнесены антенны, и углов θT и θR. Из этого следует, что путем регулирования расстояния (d), на которое разнесены антенны, и угла (θ) в антенне MIMO возможно достичь максимальной пропускной способности системы связи вне зависимости от типа геометрической формы каналов, работающих в пределах прямой видимости.
Ниже приведено описание другого варианта осуществления настоящего изобретения, который приведен в качестве примера.
Система связи MIMO согласно данному варианту осуществления изобретения, который приведен в качестве примера, содержит множество каналов. Кроме того, система содержит блок обработки по вычислению канальной матрицы на стороне передачи, или на стороне приема, или на обеих сторонах: на стороне передачи и на стороне приема. Блок обработки по вычислению канальной матрицы обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны (которой является, например, передающая антенна, светоизлучающее устройство, громкоговоритель и т.п., используемые при распространении электрических волн) или приемной антенны (которой является, например, приемная антенна, светоприемное устройство, микрофон и т.п., используемые при распространении электрических волн) или в соответствии с флуктуацией каналов. При использовании этой конфигурации имеется возможность демпфирования флуктуации местоположения передающей антенны или местоположения приемной антенны или флуктуации каналов, обеспечивая, тем самым, систему связи MIMO, способную обеспечивать максимальную пропускную способность системы связи.
Кроме того, для формирования виртуальных ортогональных каналов может быть применена конфигурация, в которой геометрические параметры каналов установлены таким образом, чтобы собственное значение канальной матрицы являлось условием множественности, и выполняют вычисление унитарной матрицы, сформированной на основании собственного вектора, полученного из собственного значения, или собственного вектора, полученного из линейной суммы собственных векторов, на стороне передачи или на стороне приема. Это обеспечивает возможность гибкой конструкции системы и возможность реализации конфигурации, в которой отсутствует необходимость использования обратного канала для обмена информацией, передаваемой по линии обратной связи, и конфигурации, в которой выполняют только обработку передач.
Кроме того, системой связи MIMO может являться система микроволновой связи между стационарными точками, в которой используют множество антенн и которая сформирована с использованием гетеродинов, которые предоставляются независимо для соответствующих антенн на одной из сторон или на обеих сторонах передачи и приема. При использовании этой конфигурации имеется возможность решить проблему необходимости достижения синхронизации по несущей между антеннами, которая налагает ограничение на построение системы микроволновой связи между стационарными точками.
Кроме того, система связи MIMO может содержать средство обнаружения флуктуации местоположения передающей антенны или местоположения приемной антенны или флуктуации каналов и может использовать результат обнаружения, полученный из этого средства, для обновления матрицы формирования виртуальных ортогональных каналов. При использовании этой конфигурации может быть создана беспроблемная система связи MIMO, имеющая удовлетворительные условия монтажа и жесткую структуру.
Кроме того, обработка по вычислению матрицы для формирования виртуальных ортогональных каналов может быть выполнена только на стороне приема. При использовании этой конфигурации может быть создана система связи MIMO, в которой отсутствует необходимость использования обратного канала для периодического и частого обмена информацией, передаваемой по линии обратной связи, для обработки по вычислению матрицы на стороне передачи.
Кроме того, система связи MIMO может содержать средство передачи контрольных сигналов от стороны передачи к стороне приема. В этом случае флуктуацию местоположения передающей антенны или местоположения приемной антенны или флуктуацию каналов обнаруживают по контрольным сигналам и производят обновление матрицы формирования виртуальных ортогональных каналов на основании результата обнаружения. При использовании этой конфигурации может быть создана беспроблемная система связи MIMO, имеющая удовлетворительные условия монтажа и жесткую структуру, которая имеет простую конфигурацию.
Кроме того, система связи MIMO может содержать средство передачи контрольных сигналов соответствующих антенн от стороны передачи к стороне приема и на основании этих контрольных сигналов выполнять обработку по вычислению матрицы для формирования виртуальных ортогональных каналов только на стороне приема. При использовании этой простой обработки может быть создана система связи MIMO, в которой отсутствует необходимость использования обратного канала для периодического и частого обмена информацией, передаваемой по линии обратной связи, для обработки по вычислению матрицы на стороне передачи.
Кроме того, контрольные сигналы, подлежащие передаче от стороны передачи к стороне приема, могут быть сгенерированы до обработки, выполняемой гетеродинами. При использовании этой конфигурации фазовый шум между гетеродинами, сгенерированный на стороне передачи, может быть обнаружен на стороне приема, и сгенерированный фазовый шум может быть скомпенсирован путем обновления матрицы.
Кроме того, обнаружение контрольных сигналов, которые были переданы от стороны передачи к стороне приема, может быть выполнено после обработки, выполненной гетеродинами на стороне приема. При использовании этой конфигурации фазовый шум между гетеродинами, сгенерированный на стороне приема, может быть обнаружен на стороне приема, и сгенерированный фазовый шум может быть скомпенсирован путем обновления матрицы.
Кроме того, контрольные сигналы, переданные от стороны передачи к стороне приема, могут являться ортогональными между передающими антеннами. При использовании этой конфигурации фазовый шум между гетеродинами и смещение в направлении высокочувствительной антенны, вызванное погодными условиями, могут быть обнаружены простым коррелятором, и обнаруженный фазовый шум или обнаруженное смещение могут быть скомпенсированы путем обновления матрицы.
Кроме того, в качестве каналов, работающих в пределах прямой видимости, могут быть использованы оптические каналы или акустические каналы, а также каналы электрических волн. В этом случае также может быть создана система связи MIMO.
Кроме того, один или оба параметра, которыми являются расстояние, на которое разнесены антенны из множества передающих антенн или множества приемных антенн, и направление множества передающих антенн или множества приемных антенн, могут быть сделаны изменяемыми. При использовании этой конфигурации может быть создана система связи MIMO, в которой всегда может быть достигнута максимальная пропускная способность системы связи путем регулирования одного или обоих параметров, которыми являются расстояние, на которое разнесены передающие антенны или приемные антенны, и осевое направление передающих антенн или приемных антенн, вне зависимости от типа геометрической формы каналов, работающих в пределах прямой видимости.
В настоящем изобретении вышеупомянутые эффекты необязательно должны быть достигнуты одновременно, но может быть достигнут, по меньшей мере, один из эффектов.
Хотя настоящее изобретение подробно продемонстрировано и описано со ссылкой на варианты осуществления, которые приведены в качестве примеров, и на примеры, настоящее изобретение не ограничено этими вариантами осуществления, которые приведены в качестве примеров, и этими примерами. Для специалистов в данной области техники понятно, что могут быть выполнены различные изменения, касающиеся формы и подробностей, не выходя за пределы сущности и объема настоящего изобретения, которые определяются формулой изобретения.
Настоящая заявка на изобретение основана на заявке на патент Японии № 2006-312277, поданной 17 ноября 2006 г., раскрытие сущности которой включено в настоящий документ в полном объеме посредством ссылки, и испрашивает приоритет этой заявки.
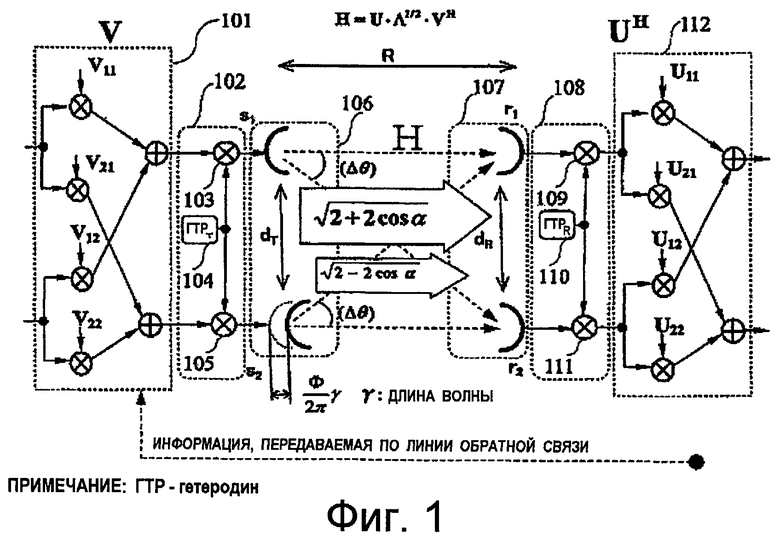
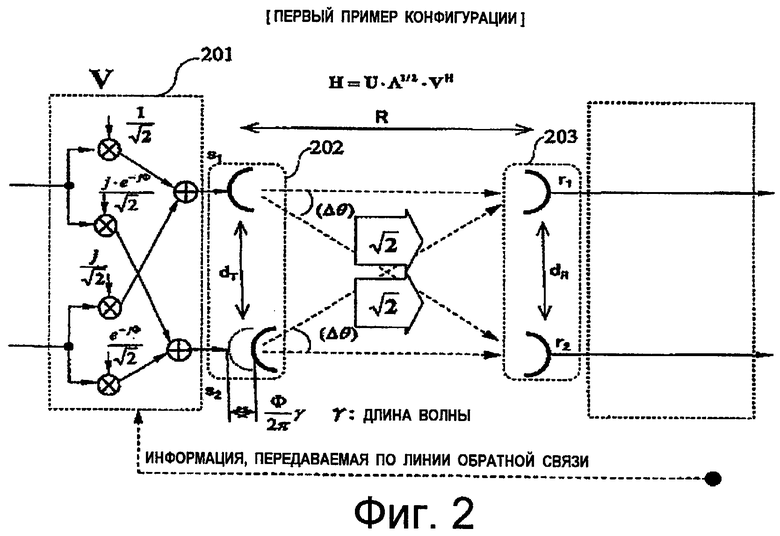
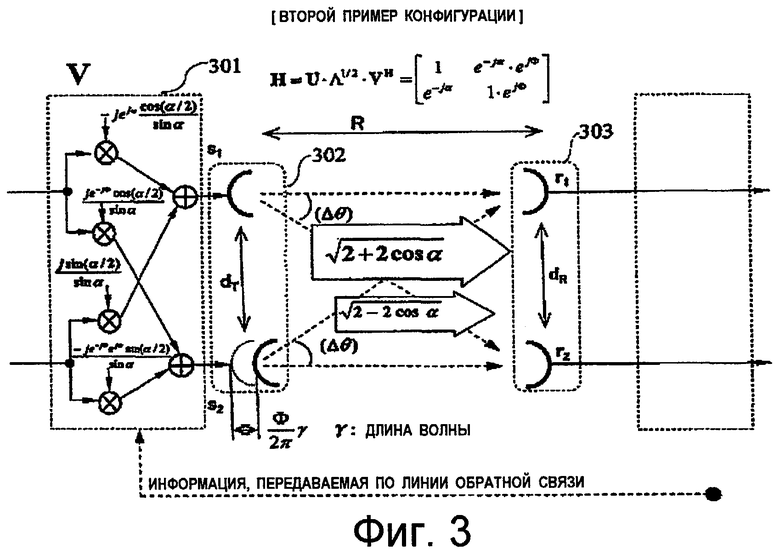
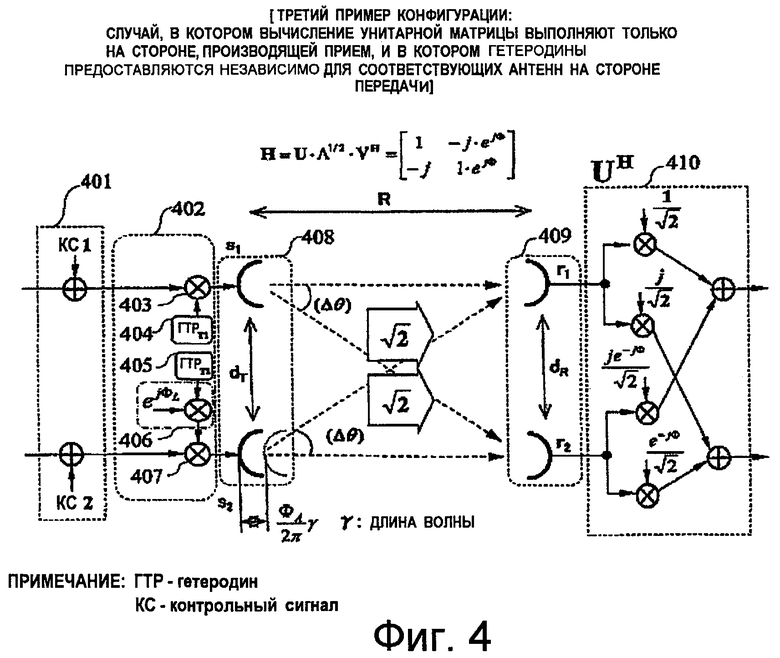
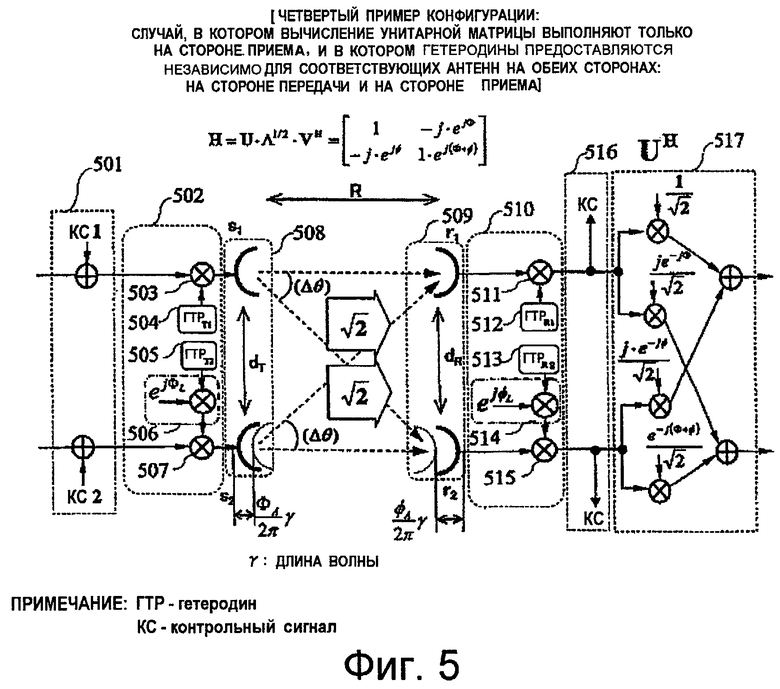
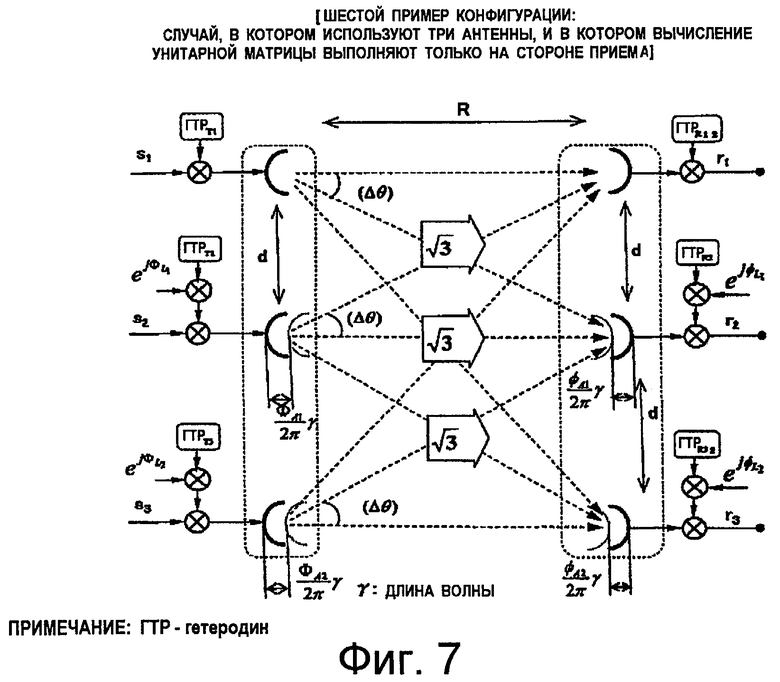
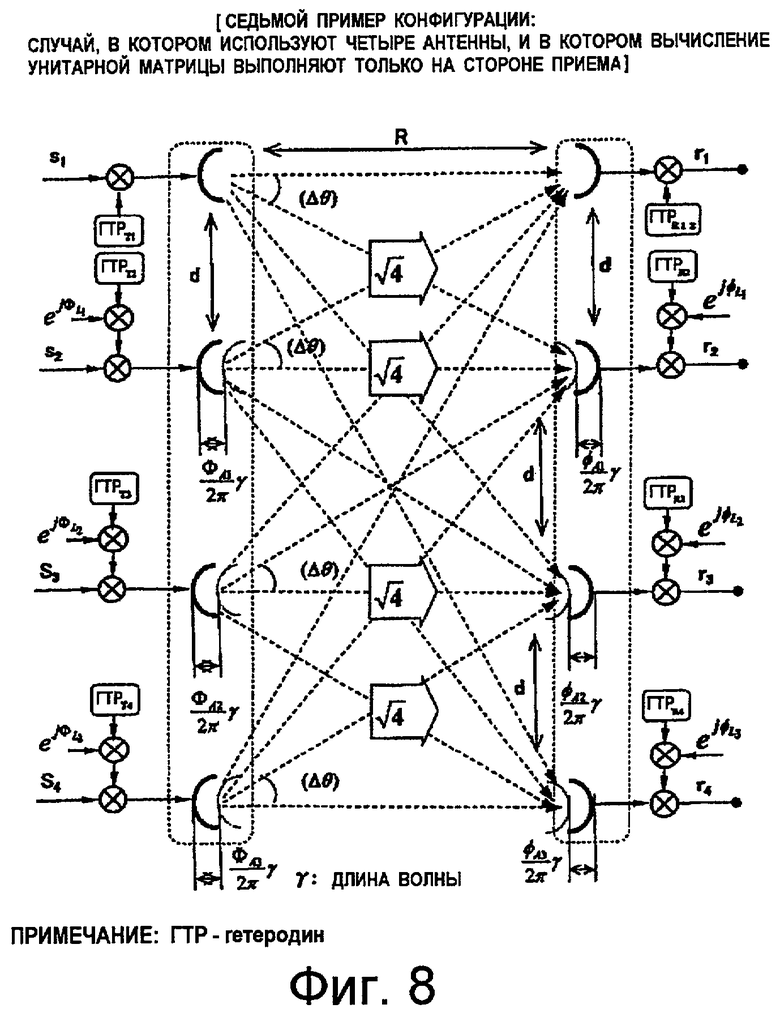
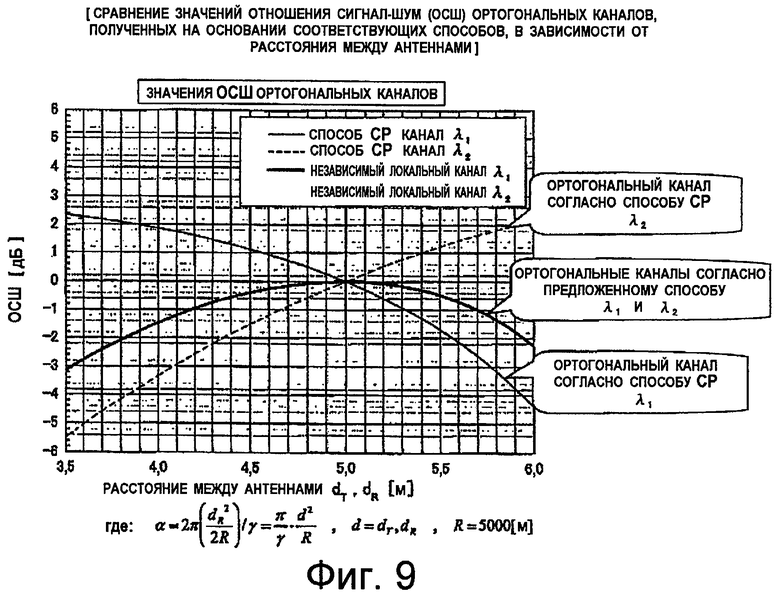
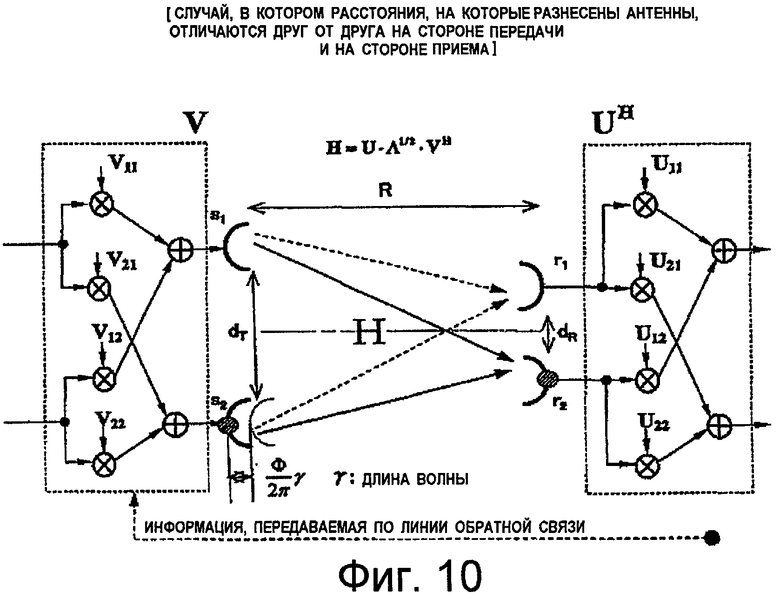
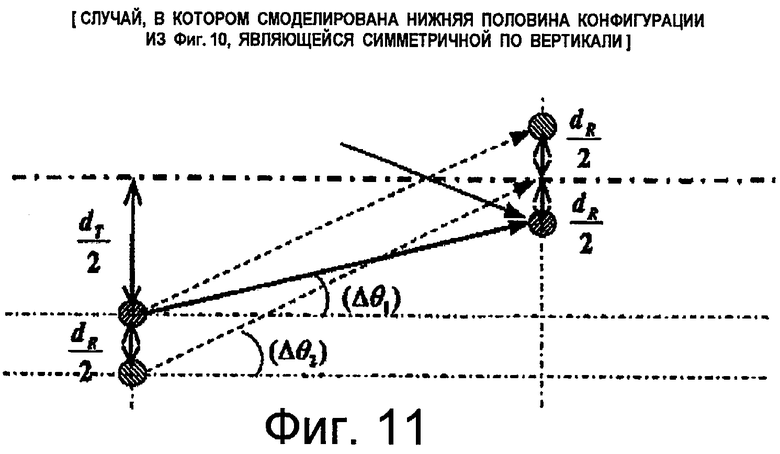
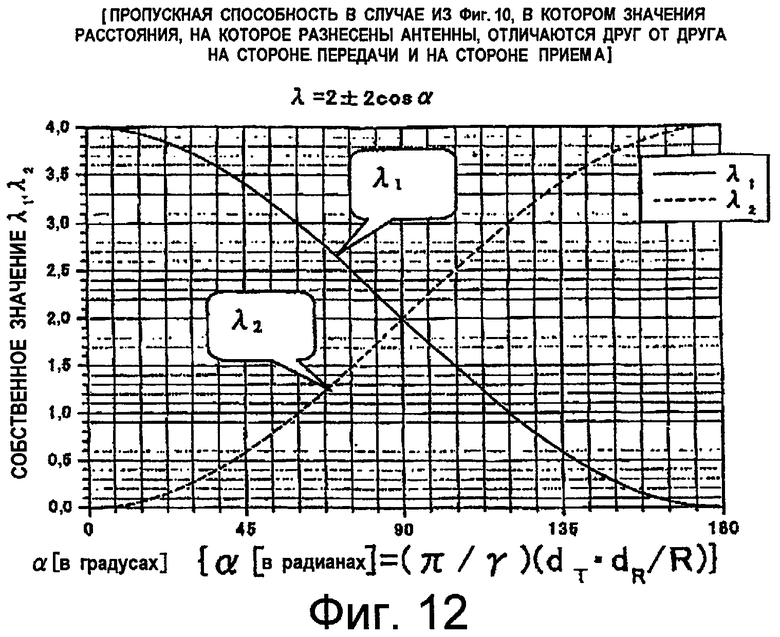
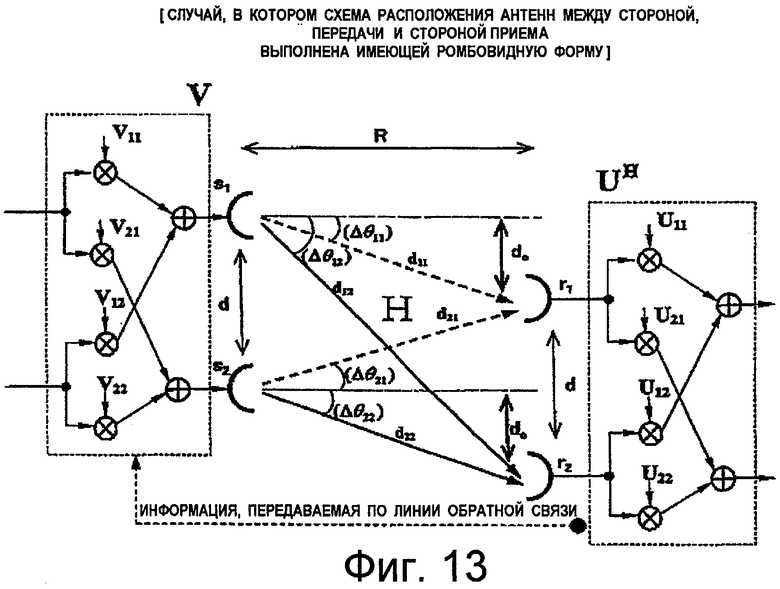
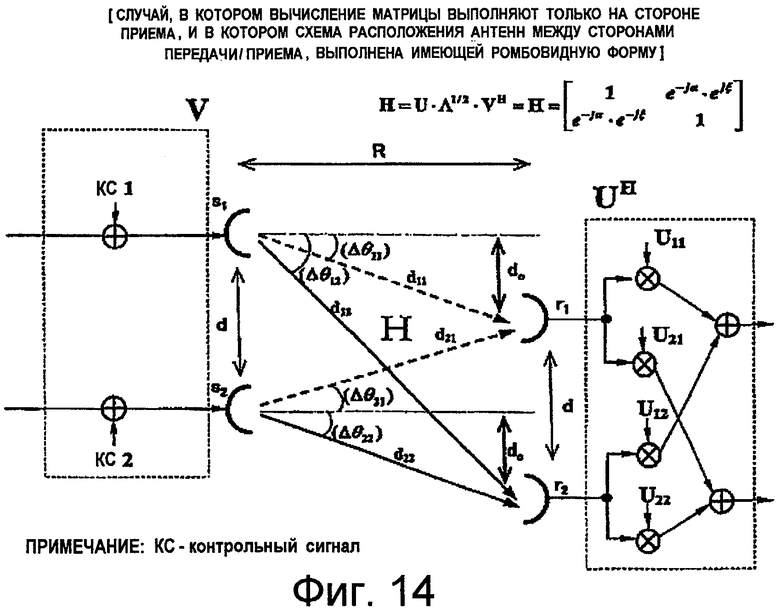
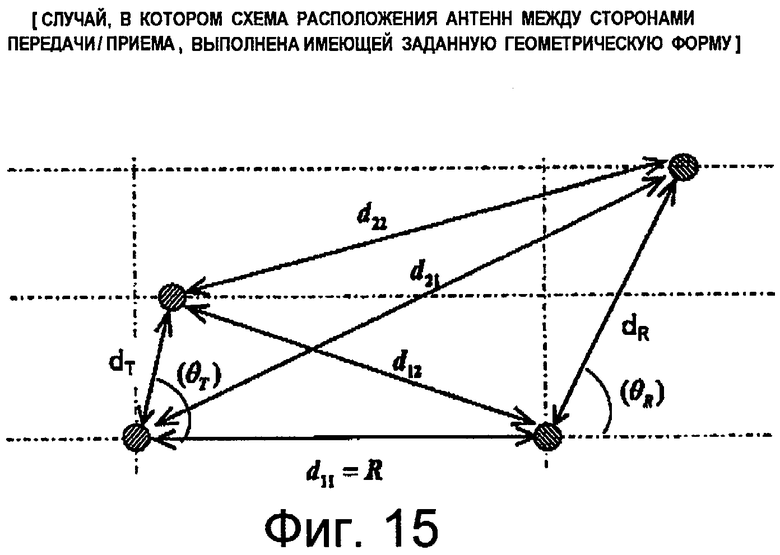
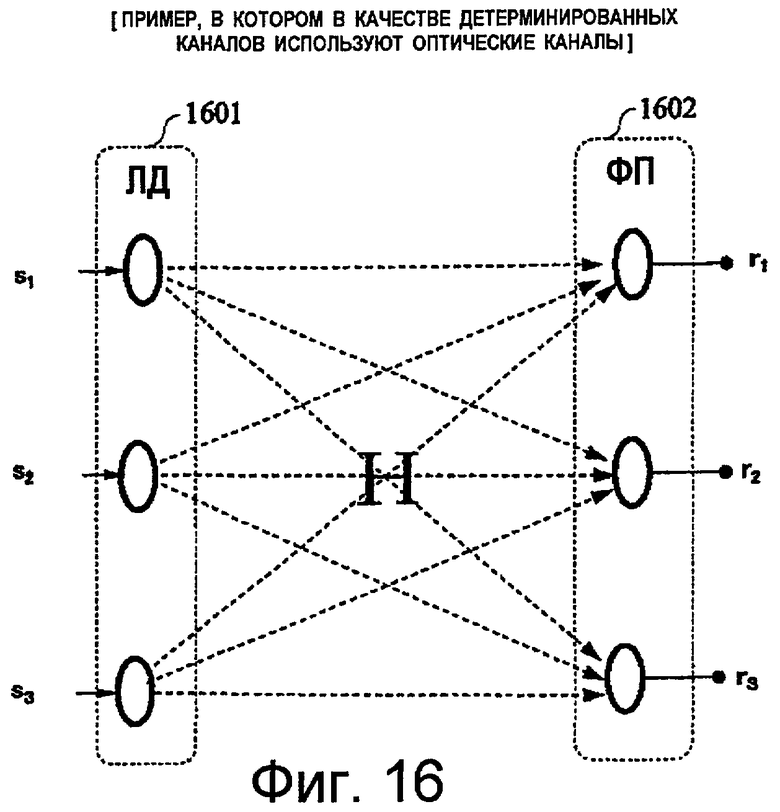
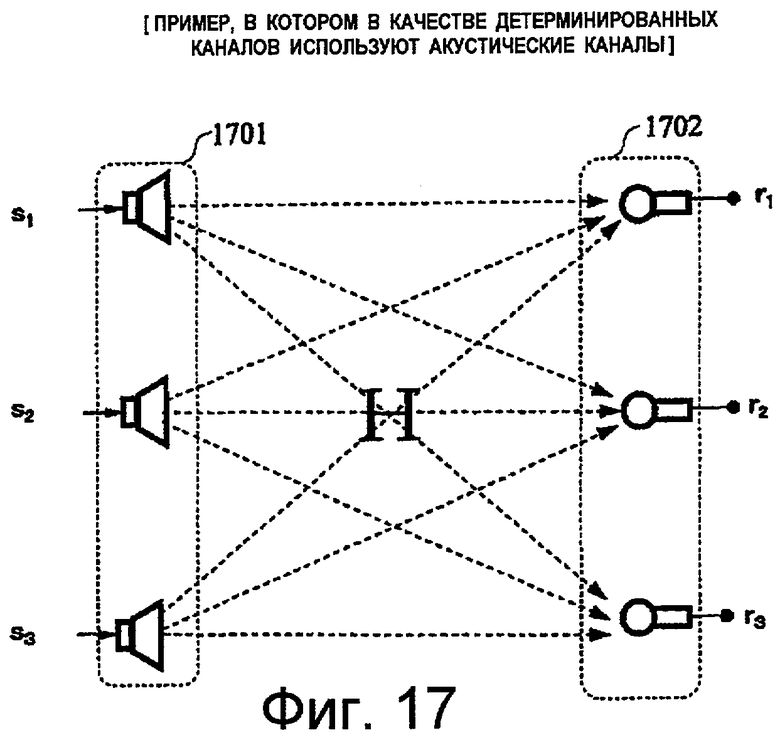
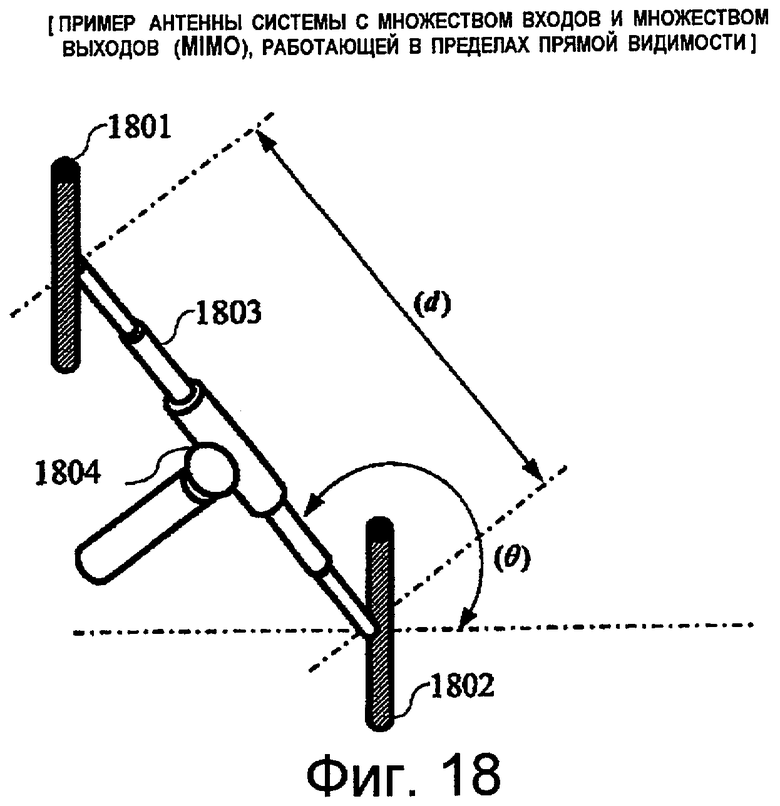
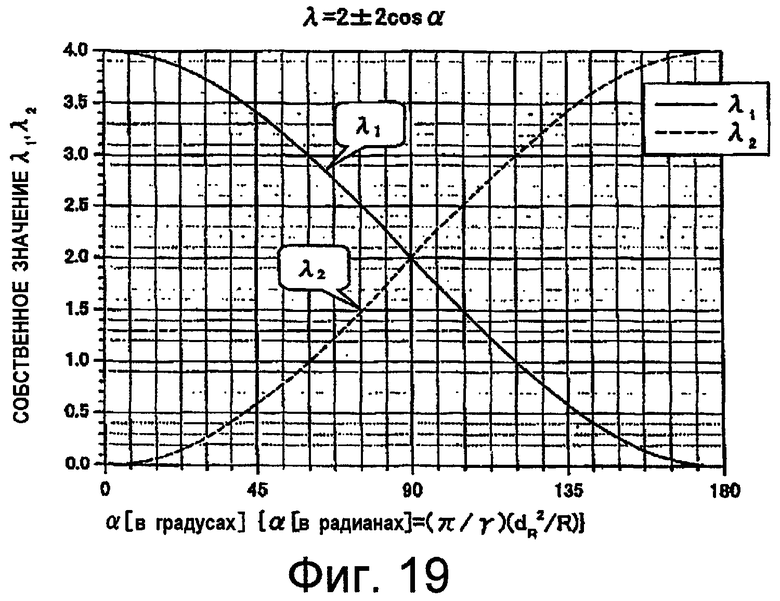
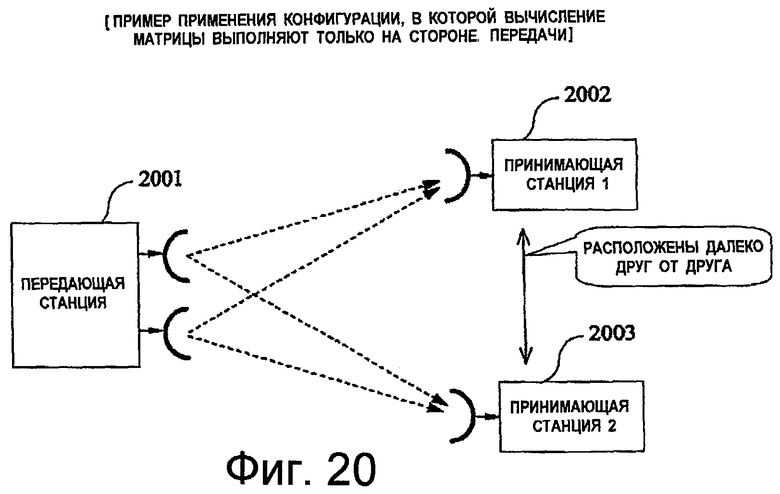
Изобретение относится к системам связи с множеством входов и множеством выходов (MIMO), имеющим детерминированные каналы, в которой конфигурация MIMO применена к каналам, работающим в пределах прямой видимости. Технический результат - увеличение пропускной способности канала связи. Система связи MIMO, работающая в пределах прямой видимости, имеющая множество каналов, содержит блок обработки по вычислению канальной матрицы на стороне передачи, или на стороне приема, или на обеих сторонах: на стороне передачи и на стороне приема. Блок обработки по вычислению канальной матрицы обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны или местоположения приемной антенны или в соответствии с флуктуацией каналов, при этом матрица формирования ортогональных каналов получена из канальной матрицы множества каналов, а канальная матрица определена посредством относящихся к местоположению геометрических параметров множества каналов. 4 н. и 26 з.п. ф-лы, 20 ил.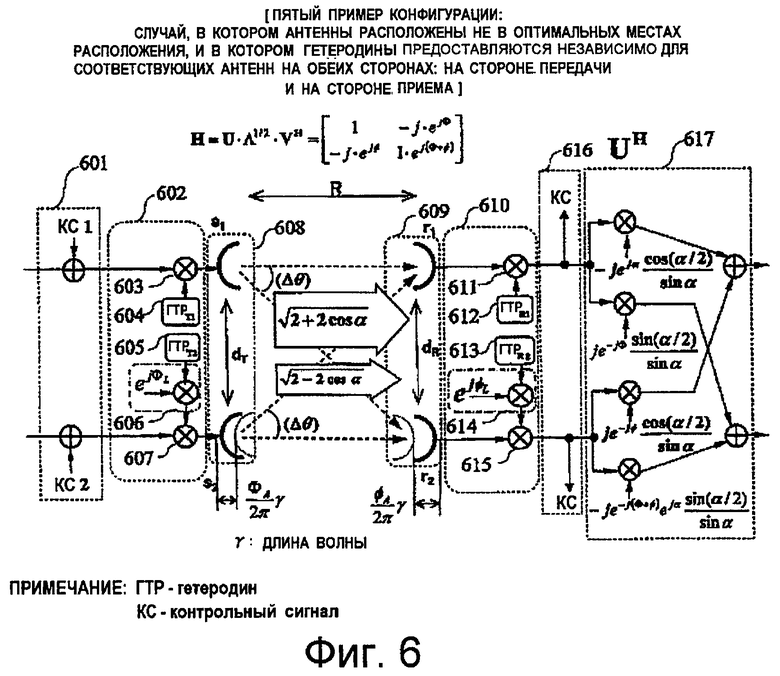
1. Система связи с множеством входов и множеством выходов (MIMO), работающая в пределах прямой видимости, которая содержит множество каналов, причем система содержит:
передатчик, содержащий первый блок преобразования частоты для преобразования сигналов, подлежащих передаче, в радиочастотные сигналы и первый блок стационарных антенн, имеющий множество передающих антенн для передачи сигналов, подвергнутых преобразованию по частоте; и
приемник, содержащий второй блок стационарных антенн, имеющий множество приемных антенн для приема сигналов, передаваемых из множества передающих антенн, и второй блок преобразования частоты для преобразования радиочастотных сигналов в сигналы полосы частот исходных сигналов,
при этом система дополнительно содержит:
блок обработки по вычислению канальной матрицы, расположенный на стороне передачи или стороне приема или на обеих сторонах, причем блок обработки обрабатывает сигналы до первого преобразования частоты и/или после второго преобразования частоты в соответствии с матрицей формирования ортогональных каналов, чтобы сформировать виртуальные ортогональные каналы между передатчиком и приемником, при этом матрица формирования ортогональных каналов получена из канальной матрицы множества каналов, причем канальная матрица определена посредством относящихся к местоположению геометрических параметров множества каналов, при этом блок обработки по вычислению канальной матрицы обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны или местоположения приемной антенны, или в соответствии с флуктуацией множества каналов.
2. Система связи MIMO по п.1, в которой
геометрические параметры множества каналов установлены таким образом, что собственное значение канальной матрицы удовлетворяет условию множественности, и
матрица формирования ортогональных каналов представляет собой унитарную матрицу, сформированную на основании собственного вектора, полученного из собственного значения, или собственного вектора, полученного из линейной суммы собственных векторов.
3. Система связи MIMO по п.1, в которой
системой связи MIMO является система микроволновой связи между стационарными точками, использующая множество передающих антенн и множество принимающих антенн, причем один или оба из первого или второго блоков преобразования частоты содержат гетеродины, предоставленные независимо для соответствующих антенн.
4. Система связи MIMO по п.3, в которой
блок обработки по вычислению канальной матрицы расположен только на стороне приема.
5. Система связи MIMO по п.1, дополнительно содержащая:
средство обнаружения флуктуации местоположения передающей антенны или местоположения приемной антенны, или флуктуации множества каналов, в которой
блок обработки по вычислению канальной матрицы обновляет матрицу формирования виртуальных ортогональных каналов на основании результата обнаружения, полученного из этого средства.
6. Система связи MIMO по п.5, дополнительно содержащая:
средство передачи контрольных сигналов от стороны передачи к стороне приема, в которой флуктуацию местоположения передающей антенны или местоположения приемной антенны, или флуктуацию каналов обнаруживают по контрольным сигналам, а обновление матрицы формирования виртуальных ортогональных каналов выполняют на основании результата обнаружения.
7. Система связи ММО по п.3, дополнительно содержащая:
средство передачи контрольных сигналов соответствующих антенн от стороны передачи к стороне приема, в которой
блок обработки по вычислению канальной матрицы формирует виртуальные ортогональные каналы на основании контрольных сигналов только на стороне приема.
8. Система связи MIMO по п.7, в которой
контрольные сигналы, подлежащие передаче от стороны передачи к стороне приема, генерируют до обработки, выполняемой гетеродинами.
9. Система связи МIМО по п.7, в которой
обнаружение контрольных сигналов, которые были переданы от стороны передачи к стороне приема, выполняют после обработки, выполняемой гетеродинами на стороне приема.
10. Система связи MIMO по п.7, в которой
контрольные сигналы, переданные от стороны передачи к стороне приема, являются ортогональными между передающими антеннами.
11. Система связи МIМО по п.1, в которой
множеством каналов являются оптические каналы.
12. Система связи MIMO по п.1, в которой
множеством каналов являются каналы радиосвязи, работающие в пределах прямой видимости.
13. Система связи MIMO по п.1, в которой
множеством каналов являются акустические каналы, работающие в пределах прямой видимости.
14. Система связи MIMO по п.2, в которой
одно или оба из расстояния, на которое разнесены антенны из множества передающих антенн или из множества приемных антенн, и направления множества передающих антенн или множества приемных антенн, являются изменяемыми.
15. Способ связи с множеством входов и множеством выходов (MIMO), предназначенный для использования в системе связи в пределах прямой видимости, включающей в себя множество каналов, содержащий этапы, на которых:
преобразуют сигналы, подлежащие передаче, в радиочастотные сигналы на стороне передачи;
передают преобразованные сигналы из множества передающих антенн;
принимают посредством множества приемных антенн сигналы, передаваемые из множества передающих антенн;
преобразуют радиочастотные сигналы в сигналы полосы частот исходных сигналов на стороне приема;
обрабатывают сигналы до этапа преобразования на стороне передачи и/или после этапа преобразования на стороне приема в соответствии с матрицей формирования ортогональных каналов, чтобы сформировать виртуальные ортогональные каналы между стороной передачи и стороной приема, причем матрица формирования ортогональных каналов получена из канальной матрицы множества каналов, при этом канальная матрица определена посредством относящихся к местоположению геометрических параметров множества каналов; и
обновляют матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны или местоположения приемной антенны, или в соответствии с флуктуацией множества каналов.
16. Способ связи MIMO по п.15, в котором
геометрические параметры множества каналов устанавливают таким образом, что собственное значение канальной матрицы удовлетворяет условию множественности, и
матрица формирования ортогональных каналов представляет собой унитарную матрицу, сформированную на основании собственного вектора, полученного из собственного значения, или собственного вектора, полученного из линейной суммы собственных векторов.
17. Способ связи МГМО по п.15, в котором
система связи представляет собой систему микроволновой связи между стационарными точками, использующую множество передающих антенн и множество приемных антенн, причем этап преобразования, осуществляемый на стороне передачи, или стороне приема, или на обеих сторонах, использует гетеродины, предоставленные независимо для соответствующих антенн.
18. Способ связи MIMO по п.17, в котором
этап обработки сигналов выполняют только на стороне приема.
19. Способ связи MIMO по п.15, дополнительно содержащий этап, на котором:
обнаруживают флуктуацию местоположения передающей антенны или местоположения приемной антенны, или флуктуацию множества каналов, и в котором
этап обновления осуществляется на основании результата обнаружения.
20. Способ связи MIMO по п.19, дополнительно содержащий этап, на котором:
передают контрольные сигналы от стороны передачи к стороне приема, и в котором этап обнаружения осуществляется посредством контрольных сигналов; и
этап обновления осуществляется на основании результата обнаружения.
21. Способ связи MIMO по п.17, дополнительно содержащий этап, на котором:
передают контрольные сигналы соответствующих антенн от стороны передачи к стороне приема; и в котором
этап обработки осуществляется на основании контрольных сигналов только на стороне приема.
22. Способ связи MIMO по п.21, в котором
контрольные сигналы, подлежащие передаче от стороны передачи к стороне приема, генерируют до обработки, выполняемой гетеродинами.
23. Способ связи MIMO по п.21, в котором
этап обнаружения контрольных сигналов, которые были переданы от стороны передачи к стороне приема, выполняют после обработки, выполняемой гетеродинами на стороне приема.
24. Способ связи MIMO по п.21, в котором
контрольные сигналы, передаваемые от стороны передачи к стороне приема, являются ортогональными между передающими антеннами.
25. Способ связи MIMO по п.15, в котором
множеством каналов являются оптические каналы.
26. Способ связи MIMO по п.15, в котором
множеством каналов являются каналы радиосвязи, работающие в пределах прямой видимости.
27. Способ связи MIMO по п.15, в котором
множеством каналов являются акустические каналы, работающие в пределах прямой видимости.
28. Способ связи MIMO по п.16, в котором
одно или оба из расстояния, на которое разнесены антенны из множества передающих антенн или из множества приемных антенн, и направления множества передающих антенн или множества приемных антенн, являются изменяемыми.
29. Передающее устройство с множеством входов и множеством выходов (MIMO) системы связи MIMO, работающей в пределах прямой видимости, которая содержит множество каналов, содержащее:
блок преобразования частоты, который преобразует сигналы, подлежащие передаче, в радиочастотные сигналы;
блок стационарных антенн, который передает сигналы, подвергнутые преобразованию по частоте, из множества передающих антенн; и
блок обработки по вычислению канальной матрицы, который: обрабатывает сигналы до преобразования частоты в соответствии с матрицей формирования ортогональных каналов, чтобы сформировать виртуальные ортогональные каналы между передающим устройством и приемником, причем матрица формирования ортогональных каналов получена из канальной матрицы множества каналов, при этом канальная матрица определена посредством относящихся к местоположению геометрических параметров множества каналов; и обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией местоположения передающей антенны или в соответствии с флуктуацией множества каналов.
30. Приемное устройство с множеством входов и множеством выходов (MIMO) системы связи MIMO, работающей в пределах прямой видимости, которая содержит множество каналов, содержащее:
блок стационарных антенн, который принимает радиочастотные сигналы посредством множества приемных антенн;
блок преобразования частоты, который преобразует радиочастотные сигналы в сигналы полосы частот исходных сигналов; и
блок обработки по вычислению канальной матрицы, который: обрабатывает сигналы после преобразования частоты в соответствии с матрицей формирования ортогональных каналов, чтобы сформировать виртуальные ортогональные каналы между передатчиком и приемным устройством, причем матрица формирования ортогональных каналов получена из канальной матрицы множества каналов, при этом канальная матрица определена посредством относящихся к местоположению геометрических параметров множества каналов; и обновляет матрицу формирования ортогональных каналов в соответствии с флуктуацией приемной антенны или в соответствии с флуктуацией множества каналов.
| : WO 2005039095 А1, 28.04.2005 | |||
| JP 2001505723 А, 24.04.2001 | |||
| JP 2003258770 А, 12.09.2003 | |||
| WO2005088884 А1, 22.09.2005 | |||
| ЕРМОЛАЕВ В.Т | |||
| и др Адаптивная пространственная обработка сигналов в системах беспроводной связи, Нижний Новгород, 2006, с.48-50 | |||
| DRIESSEN P.F., FOSCHINI G.J.: 'On the Capacity Formula for Multiple Input - Multiple Output Wireless |

