Изобретение относится к области оптического приборостроения, более конкретно - к устройствам наблюдения объектов и прицеливания, а также к устройствам для измерения расстояний до целей с помощью встроенного лазерного дальномера и для наведения управляемых ракет на цель по лазерному лучу. Данное устройство может быть использовано в системах управления огнем объектов бронетанковой техники.
Известен прицел-прибор наведения с лазерным дальномером [1], включающий визирный канал, лазерный дальномер и лазерный канал наведения управляемого снаряда на цель. Основными недостатками данного устройства являются значительные габаритные размеры из-за разнесенности в пространстве объективов визирного канала, канала наведения и телескопа передающего канала лазерного дальномера, а также невозможность обеспечения высокой точности работы лазерного дальномера и лазерного канала наведения и, следовательно, высокой точности прицеливания и стрельбы или наведения управляемых снарядов на цель при выполнении боевой задачи из-за отсутствия встроенной комплексной системы взаимной выверки всех каналов.
Наиболее близким по технической сущности и достигаемому эффекту является прицел-прибор наведения с лазерным дальномером [2], выбранный в качестве прототипа, содержащий взаимно параллельные визирный канал, включающий оптически связанные объектив, сетку с прицельной маркой, установленной неподвижно в фокальной плоскости объектива, и систему наблюдения, содержащую оборачивающую систему и окуляр. Прицел-прибор наведения содержит также лазерный дальномер, включающий передающий канал, выполненный в виде последовательно установленных и оптически связанных импульсного лазерного излучателя и телескопа, и приемный канал, включающий объектив визирного канала, систему разделения каналов и фотоприемное устройство, лазерный канал наведения, включающий оптически связанные и последовательно установленные непрерывный лазерный излучатель, растровый модулятор, панкратическую систему, систему разделения каналов и объектив визирного канала, при этом система разделения каналов содержит оптически связанные первый спектроделитель, установленный на оси визирного канала между объективом и сеткой, и поворотную плоскопараллельную пластину с зеркальным покрытием, расположенную на оси канала наведения между первым спектроделителем и панкратической системой с возможностью ее вывода из оптического тракта путем поворота вокруг оси вращения, при этом фотоприемное устройство и панкратическая система установлены с возможностью оптической связи с объективом при нахождении плоскопараллельной пластины с зеркальным покрытием в указанном оптическом тракте и вне его соответственно. Все составные части устройства размещены внутри жесткого корпуса.
Основными недостатками прототипа являются невозможность обеспечения в составе объекта высокой точности стрельбы и наведения управляемых ракет на цель из-за отсутствия встроенной комплексной системы оперативной выверки основных каналов, что в условиях реальной работы приводит к ошибкам работы лазерного дальномера и лазерного канала наведения, невысокая надежность работы лазерного дальномера и лазерного канала наведения и ограниченные функциональные возможности. Невысокая надежность работы лазерного дальномера обусловлена возможностью появления непараллельности передающего канала относительно визирного канала в процессе выполнения боевой задачи, которую невозможно оперативно обнаружить и устранить в полевых условиях, и возможностью разрушения фотоприемного канала лазерного дальномера с помощью средств противодействия противника, так как отсутствуют средства защиты фотоприемного устройства.
Размещение непрерывного лазера внутри корпуса прицела затрудняет отвод тепла от его разогретых частей, что может надолго вывести лазерный канал наведения из строя, что дополнительно снижает надежность его работы. Ограниченные функциональные возможности устройства обусловлены отсутствием многофункциональной оптико-электронной системы ввода служебной информации непосредственно в поле зрения окуляра для непрерывного информирования наводчика и командира объекта о состоянии системы управления огнем объекта и измеренной дальности до цели, отсутствием удобной многофункциональной системы ввода управляющих команд в прицел-прибор наведения и систему управления огнем объекта.
Основными задачами изобретения являются повышение точности стрельбы и наведения управляемых ракет на цель, повышение надежности, расширение функциональных возможностей прибора.
Для решения этих задач в прицел-прибор наведения с лазерным дальномером, содержащим корпус и жестко связанные с ним взаимно параллельные визирный канал, включающий оптически связанные объектив, сетку с прицельной маркой, оборачивающую систему и окуляр, лазерный дальномер, включающий передающий канал, содержащий последовательно установленные и оптически связанные импульсный лазер и телескоп, и приемный канал, включающий объектив визирного канала, систему разделения каналов и фотоприемное устройство, лазерный канал наведения, включающий оптически связанные и последовательно установленные непрерывный лазер, растровый модулятор, панкратическую систему, систему разделения каналов и объектив визирного канала, при этом система разделения каналов содержит оптически связанные первый спектроделитель, установленный на оси визирного канала между объективом и сеткой, и поворотную плоскопараллельную пластину с зеркальным покрытием, расположенную на оси канала наведения между первым спектроделителем и панкратической системой с возможностью ее вывода из оптического тракта путем поворота вокруг оси вращения, при этом фотоприемное устройство и панкратическая система установлены с возможностью оптической связи с объективом при нахождении поворотной плоскопараллельной пластины с зеркальным покрытием в указанном оптическом тракте и вне его соответственно, в отличие от прототипа введены первая система выверки, установленная на выходе передающего канала лазерного дальномера и выполненная в виде оптической афокальной системы, включающей положительную и отрицательную линзы, каждая из которых установлена с возможностью перемещения в одном из направлений, перпендикулярных оси передающего канала лазерного дальномера, при этом направления перемещения линз взаимно ортогональны, вторая система выверки, расположенная между панкратической системой и поворотной плоскопараллельной пластиной с зеркальным покрытием и выполненная в виде двух оптически связанных плоскопараллельных пластин, каждая из которых установлена с возможностью вращения вокруг оси, параллельной рабочим поверхностям соответствующей пластины, при этом оси вращения пластин взаимно ортогональны, коллиматор видимого излучения, оптически связанный с телескопом с помощью второго спектроделителя, установленного между телескопом и импульсным лазером, осветитель видимого излучения, оптически связанный с растровым модулятором посредством третьего спектроделителя, расположенного между непрерывным лазером и растровым модулятором, оптический блок с датчиком его положений, включающий жестко связанные между собой призму типа БкР-180° и световозвращатель, размещенный перед объективом визирного канала таким образом, что световозвращатель оптически связан с объективом, а входная и выходная грани призмы типа БкР-180° расположены в пределах выходного зрачка телескопа и входного зрачка объектива визирного канала соответственно, и установленный с возможностью его вывода за пределы хода рабочих лучей каналов, блок матричных светодиодных индикаторов, оптически связанный с окуляром посредством оптической системы, а также электрически связанные между собой пульт управления и устройство управления и обработки электрических сигналов, при этом импульсный и непрерывный лазеры, коллиматор видимого излучения, осветитель видимого излучения, растровый модулятор, панкратическая система, блок матричных светодиодных индикаторов, поворотная плоскопараллельная пластина с зеркальным покрытием, датчик положений оптического блока и фотоприемное устройство электрически связаны с устройством управления и обработки электрических сигналов, поворотная плоскопараллельная пластина выполнена таким образом, что зеркальное покрытие нанесено на одну половину ее рабочей поверхности, а другая половина выполнена диффузно отражающей, причем поворотная плоскопараллельная пластина может устанавливаться в три фиксированных положения, первое из которых соответствует введенной диффузно отражающей поверхности в ход лучей лазерного канала наведения, второе положение соответствует выведенной поворотной плоскопараллельной пластине из хода лучей лазерного канала наведения, и третье положение соответствует введенной в ход лучей лазерного канала наведения ее зеркальной поверхности, а непрерывный лазер закреплен на внешней поверхности корпуса прицела-прибора наведения и оптически связан с растровым модулятором через отверстие в корпусе.
Непрерывный лазер может быть выполнен в виде лазера с диодной накачкой, в частности в виде волоконного лазера.
Корпус может иметь установочную поверхность с ориентирующими элементами для закрепления на ней дополнительного оптико-электронного модуля наблюдения, например тепловизора, в положении, при котором его визирная ось параллельна оси визирного канала.
Устройство управления и обработки электрических сигналов может включать последовательный канал связи с внешними устройствами.
Введение в прицел-прибор наведения первой системы выверки, установленной на выходе передающего канала лазерного дальномера и выполненной в виде оптической афокальной системы, включающей положительную и отрицательную линзы, каждая из которых установлена с возможностью перемещения в одном из направлений, перпендикулярных оси передающего канала лазерного дальномера, при этом направления перемещения линз взаимно ортогональны, второй системы выверки, расположенной между панкратической системой и поворотной плоскопараллельной пластиной с зеркальным покрытием и выполненной в виде двух оптически связанных плоскопараллельных пластин, каждая из которых установлена с возможностью вращения вокруг оси, параллельной рабочим поверхностям соответствующей пластины, при этом оси вращения пластин взаимно ортогональны, коллиматора видимого излучения, оптически связанного с телескопом с помощью второго спектроделителя, установленного между телескопом и импульсным лазером, осветителя видимого излучения, оптически связанного с растровым модулятором посредством третьего спектроделителя, расположенного между непрерывным лазером и растровым модулятором, оптического блока с датчиком его положений, включающего жестко связанные между собой призму типа БкР-180° и световозвращатель, размещенный перед объективом визирного канала таким образом, что световозвращатель оптически связан с объективом, а входная и выходная грани призмы типа БкР-180° расположены в пределах выходного зрачка телескопа и входного зрачка объектива визирного канала соответственно, и установленного с возможностью его вывода за пределы хода рабочих лучей каналов, образует встроенную комплексную систему взаимной оперативной выверки передающего канала лазерного дальномера и лазерного канала наведения относительно визирного канала, позволяющую наводчику даже непосредственно в боевой обстановке, не выходя из объекта, за короткое время проверить согласование рабочих каналов и при необходимости обеспечить устранение выявленных ошибок, обеспечив тем самым правильную работу лазерного дальномера и лазерного канала наведения, обеспечивает повышение точности стрельбы и наведения управляемых ракет на цель. Одновременно достигается и повышение надежности работы лазерного дальномера и лазерного канала наведения благодаря возможности оперативного обнаружения и устранения непараллельности рабочих каналов прицела в полевых условиях.
Выполнение поворотной плоскопараллельной пластины таким образом, что зеркальное покрытие нанесено на одну половину ее рабочей поверхности, а другая половина выполнена диффузно отражающей, и возможность установки ее в три фиксированных положения, первое из которых соответствует введенной диффузно отражающей поверхности в ход лучей лазерного канала наведения, второе положение соответствует выведенной поворотной плоскопараллельной пластине из хода лучей лазерного канала наведения, и третье положение соответствует введенной в ход лучей лазерного канала наведения ее зеркальной поверхности, обеспечивают дополнительно повышение надежности работы лазерного дальномера, защищая фотоприемное устройство лазерного дальномера от разрушения с помощью лазерных средств противодействия противника, так как такая пластина открывает приемный канал лазерного дальномера только в момент измерения дальности, а в остальное время он физически недоступен для прямого воздействия лазерных средств противодействия противника.
Закрепление непрерывного лазера на внешней поверхности корпуса прицела-прибора наведения и оптическая связь его с растровым модулятором через отверстие в корпусе улучшают отвод тепла от его нагревающихся частей за счет естественной или искусственной вентиляции, что уменьшает вероятность перегрева лазера и повышает надежность работы лазерного канала наведения.
Введение блока матричных светодиодных индикаторов, оптически связанных с окуляром посредством оптической системы, а также электрически связанных между собой пульта управления и устройства управления и обработки электрических сигналов, а также наличие электрических связей между импульсным и непрерывным лазерами, коллиматором видимого излучения, осветителем видимого излучения, растровым модулятором, панкратической системой, блоком матричных светодиодных индикаторов, поворотной плоскопараллельной пластиной с зеркальным покрытием, датчиком положений оптического блока и фотоприемным устройством с устройством управления и обработки электрических сигналов обеспечивают расширение функциональных возможностей прицела, так как дает возможность передать непосредственно в поле зрения окуляра, которое находится постоянно в поле зрения наводчика, или на монитор командира объекта необходимую для него цифровую и символьную служебную информацию, включая измеренную с помощью лазерного дальномера дальность до цели, обеспечивает возможность оперативного или автоматического тестирования систем прицела, ввода различных режимов работы, управляющих команд, получения необходимой служебной информации от внешних устройств системы управления огнем объекта. Применение матричных светодиодных индикаторов обеспечивает наибольшую простоту оптической части системы индикации, так как не требует оборачивания изображения символов с помощью оптической системы, поскольку эта функция реализуется с помощью управляющей программы электронным путем, благодаря чему в плоскости расположения матричных светодиодных индикаторов формируется символ нужной формы и ориентации, который наблюдается оператором через окуляр в требуемом удобном для восприятия виде.
Выполнение непрерывного лазера в виде лазера с диодной накачкой, в частности в виде волоконного лазера, обеспечивает дополнительно повышение надежности работы лазерного канала наведения, так как снижает энергопотребление за счет высокого КПД таких лазеров, что практически не приводит к перегреву при наведении управляемых ракет на цель и не ограничивает количество пусков ракет.
Выполнение корпуса с установочной поверхностью и ориентирующими элементами для закрепления на ней дополнительного оптико-электронного модуля наблюдения, например тепловизора, в положении, при котором его визирная ось параллельна оси визирного канала, также обеспечивает расширение функциональных возможностей, в том числе обеспечивает возможность наблюдения и ведения стрельбы при пониженной освещенности и при наличии пыли и дыма в направлении цели.
Устройство управления и обработки электрических сигналов может включать последовательный канал связи с внешними устройствами для передачи им служебной информации и управляющих команд, что также обеспечивает расширение функциональных возможностей прицела.
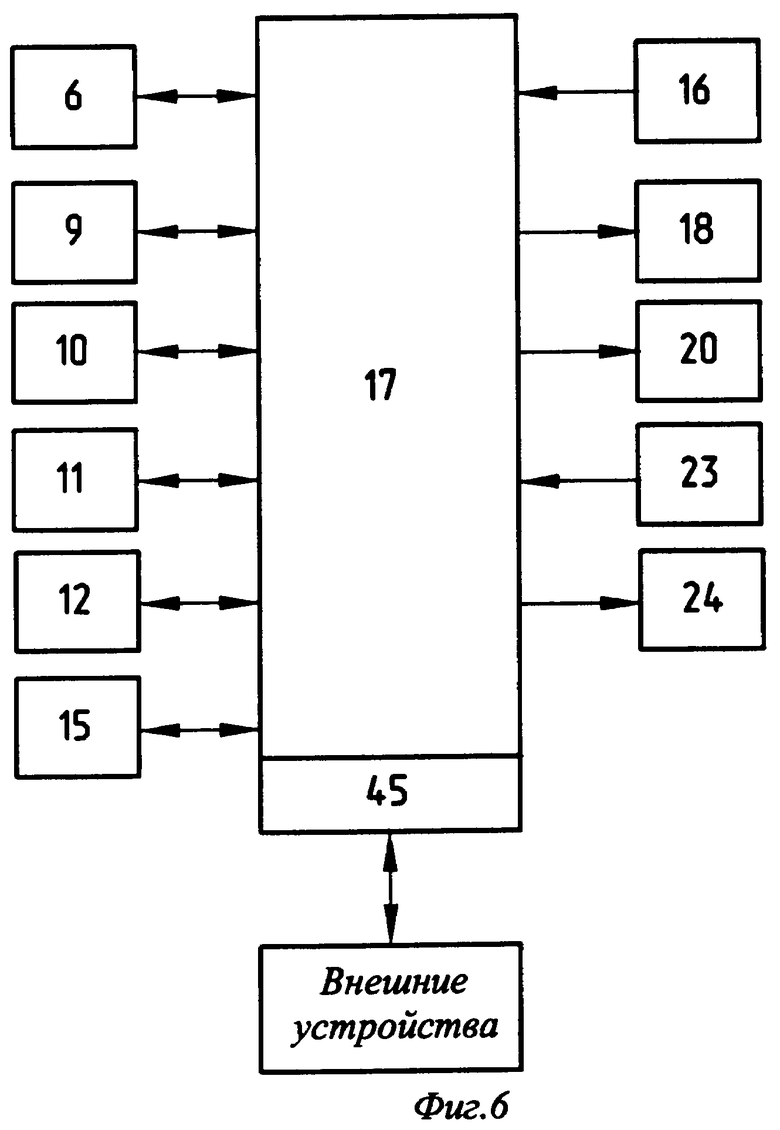
На фиг.1 представлена принципиальная схема прицела-прибора наведения с лазерным дальномером, на фиг.2 показан его внешний вид со стороны передней панели, на фиг.3-5 показана рабочая поверхность поворотной плоскопараллельной пластины в трех положениях фиксации, а на фиг.6 приведена функциональная электрическая схема прицела.
Прицел-прибор наведения с лазерным дальномером включает (фиг.1) жесткий корпус 1, в котором размещены визирный канал, включающий оптически связанные объектив 2, сетку 3 с прицельной маркой, установленной неподвижно в фокальной плоскости объектива 2, и систему наблюдения, содержащую оборачивающую систему 4 и окуляр 5, лазерный дальномер, включающий передающий канал, выполненный в виде последовательно установленных и оптически связанных импульсного лазера 6, телескопа 7 и первой системы выверки 8, и приемный канал, включающий объектив 2, общий с объективом визирного канала, систему разделения каналов и фотоприемное устройство 9, лазерный канал наведения, включающий оптически связанные непрерывный лазер 10, растровый модулятор 11, панкратическую систему 12, вторую систему выверки 13, систему разделения каналов и объектив 2 визирного канала, причем система разделения каналов содержит установленный на оси визирного канала между объективом 2 и сеткой 3 первый спектроделитель 14, оптически связанный с поворотной плоскопараллельной пластиной 15 с зеркальным покрытием, расположенной на оси канала наведения между первым спектроделителем 14 и второй системой выверки 13, с возможностью ее вывода из оптического тракта путем поворота вокруг оси, параллельной нормали к отражающей поверхности пластины 15, при этом фотоприемное устройство 9 и панкратическая система 12 установлены с возможностью оптической связи с объективом 2 при нахождении зеркальной поверхности поворотной плоскопараллельной пластины 15 в указанном оптическом тракте и вне его соответственно.
Импульсный лазер 6 выполнен на основе активного элемента из калий гадолиниевого вольфрамата (КГВ) с пассивным модулятором добротности и снабжен источником питания лампы накачки.
Растровый модулятор лазерного излучения 11 включает растр с двумя кодовыми дорожками - внутренней и внешней - и проекционную систему для проектирования внутренней дорожки растра на внешнюю дорожку. Изображение внутренней дорожки перпендикулярно внешней дорожке. В зоне пересечения дорожек образуется информационный квадрат, в пределах которого при вращении растра формируется лазерное поле управления. Информационный квадрат находится в фокальной плоскости проекционной оптической системы, образованной объективом 2 и панкратической системой 12, и подсвечивается лазерным излучением непрерывного лазера 10.
Прицел-прибор наведения с лазерным дальномером содержит также пульт управления 16, электрически связанный с устройством управления и обработки электрических сигналов 17, коллиматор 18 видимого излучения, оптически связанный с телескопом 7 с помощью второго спектроделителя 19, установленного между телескопом 7 и импульсным лазером 6, осветитель 20 видимого излучения, оптически связанный с растровым модулятором 11 с помощью третьего спектроделителя 21, расположенного между непрерывным лазером 10 и растровым модулятором 11, оптический блок 22 с датчиком 23 его положений, а также блок матричных светодиодных индикаторов 24, оптически связанный с окуляром 5 посредством оптической системы 25.
Пульт управления 16 включает корпус с элементами коммутации, связанными электрически с устройством управления и обработки электрических сигналов 17.
Оптическая система 25 может включать проекционный объектив и согласующее зеркало, как описано в [3].
В качестве блока матричных светодиодных индикаторов может быть использован знакосинтезирующий индикатор типа HCMS-2905. Светодиодные индикаторы электрически связаны с устройством управления и обработки электрических сигналов 17, которое формирует управляющие команды для формирования символов в светящейся плоскости служебной информации, необходимой оператору.
Оптический блок 22 включает жестко связанные призму 26 БкР-180° или эквивалентную ей, и световозвращатель 27.
Коллиматор 18 видимого излучения содержит подсвечиваемую выверочную марку 28, установленную в фокальной плоскости объектива 29 коллиматора. Выверочная марка 28 может представлять собой стеклянную пластину с металлическим покрытием, на которой сформирована прозрачная диафрагма.
Выверочная марка лазерного канала наведения формируется путем подсветки информационного квадрата растрового модулятора 11 посредствам осветителя 20 видимого излучения и третьего спектроделителя 21. В качестве осветителя 20 видимого излучения может быть использован светодиод типа LXHL-PD01.
На фиг.1 показаны также плоские зеркала 30, 31, 32, служащие для компоновки прибора, оптическая система сопряжения 33 непрерывного лазера 10 с входным окном растрового модулятора 11, а также блок 34 головного зеркала, внутри которого расположено поворотное зеркало 35. Блок головного зеркала 34 с помощью штифтов 36 закреплен на корпусе 1 через фланец 37, служащий для крепления устройства на объекте, а на выходе из блока головного зеркала установлены защитные стекла 38, обеспечивающие пропускание оптического излучения в различных спектральных диапазонах.
Оптическая система сопряжения 33 представляет собой блок линз, оптимально согласующих лазерное излучение непрерывного лазера 10 с информационным квадратом растрового модулятора 11.
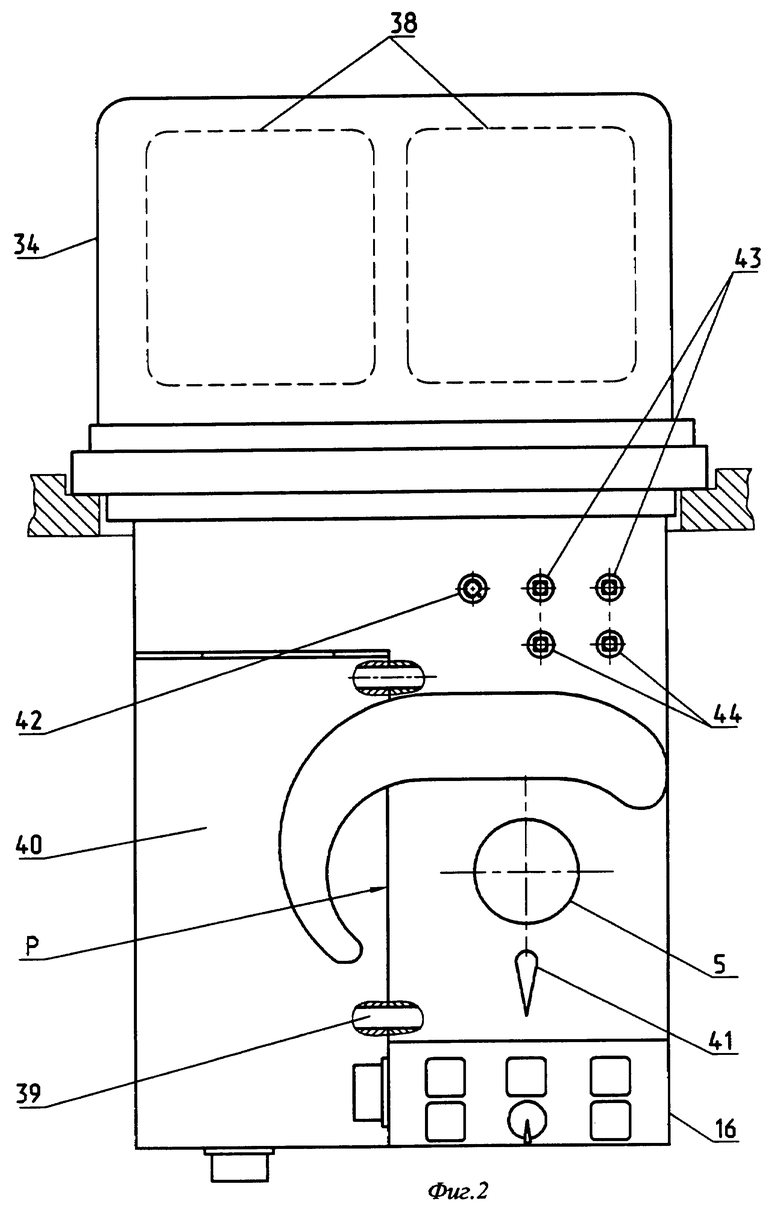
Корпус 1 (фиг.2) имеет установочную поверхность Р для закрепления на ней при однозначной установке с помощью координирующих штифтов 39 дополнительного оптико-электронного модуля наблюдения 40, например тепловизора, в положении, при котором его визирная ось параллельна оси визирного канала.
Со стороны передней панели прибора размещены (фиг.2), по крайней мере, коммутирующие органы пульта управления 16, рукоятка 41 переключения линзовых блоков оборачивающей системы 4, рукоятка 42 введения в ход лучей оптического блока 22, две рукоятки 43 перемещения линз первой системы выверки 8, и две рукоятки 44 поворота пластин второй системы выверки 13.
Оптический блок 22 установлен с возможностью его размещения в ходе лучей света, выходящего из объектива телескопа 7 и входящего в объектив 2 визирного канала таким образом, что световозвращатель 27 оптически сопряжен с объективом 2, а входная и выходная грани призмы 26 БкР-180° расположены в пределах выходного зрачка телескопа 7 и входного зрачка объектива 2 визирного канала соответственно, или за пределами хода лучей света. Оптический блок 22 может быть снабжен парой клиньев для компенсации ошибок изготовления углов призмы 26 БкР-180°. Для определения положения оптический блок 22 содержит датчик 23 положений, включающий, по меньшей мере, две оптопары, жестко закрепленные на корпусе, и шторку, жестко связанную с поворотной частью оптического блока 22. Оптопары установлены так, что сигналы от них последовательно формируются и передаются на устройство управления и обработки электрических сигналов 17, когда оптический блок 22 расположен в одном из крайних положений: в ходе лучей рабочих каналов или вне хода лучей. Введение оптического блока 22 в ход лучей света осуществляется с помощью рукоятки 42, кинематически связанной с двухпозиционным зубчатым механизмом поворота оптического блока 22.
Оборачивающая система 4 выполнена с переменным увеличением и включает сменные линзовые блоки для обеспечения наблюдения объектов с различным увеличением, которые могут быть размещены в турели и вводятся оператором с помощью рукоятки 41 через зубчатый редуктор.
Телескоп 7 представляет собой телескопическую оптическую систему Галлилея с увеличением Г<1 для повышения плотности энергии на цели и увеличения дальности действия лазерного дальномера.
Первая система выверки 8 выполнена в виде оптической афокальной системы, включающей последовательно расположенные положительную и отрицательную линзы, каждая из которых установлена с возможностью перемещения в одном из направлений, перпендикулярных оси передающего канала дальномера, при этом направления перемещения линз взаимно ортогональны, а перемещение линз первой системы выверки 8 осуществляется при помощи двух рукояток 43, кинематически связанных с винто-рычажными передачами для перемещений оправ с линзами.
Вторая система выверки 13 выполнена в виде двух оптически связанных плоскопараллельных пластин, каждая из которых установлена с возможностью вращения вокруг оси, параллельной рабочим поверхностям соответствующей пластины, при этом оси вращения пластин взаимно ортогональны, а поворот пластин второй системы выверки 13 осуществляется при помощи двух рукояток 44, кинематически связанных с винто-рычажными передачами для перемещений оправ с пластинами.
Вращение растра растрового модулятора 11 и перемещение линз панкратической системы 12 осуществляется с помощью соответствующих электроприводов (на фиг.1 не показаны). При этом вращение вала электропривода растра передается к последнему через эластичную муфту, а для перемещения линз панкратической системы 12 используется электропривод с редуктором на основе плоских или торцевых кулачков, задающих требуемый закон перемещения линз. Электропривод растра снабжен датчиком скорости вращения. Электропривод с редуктором панкратической системы 12 снабжен датчиком, характеризующим положение ее линз.
Непрерывный лазер 10 закреплен на внешней поверхности корпуса 1 и оптически связан с растровым модулятором 11 через отверстие в корпусе 1. Непрерывный лазер 10 выполнен в виде лазера с диодной накачкой, например волоконного лазера (фиг.1).
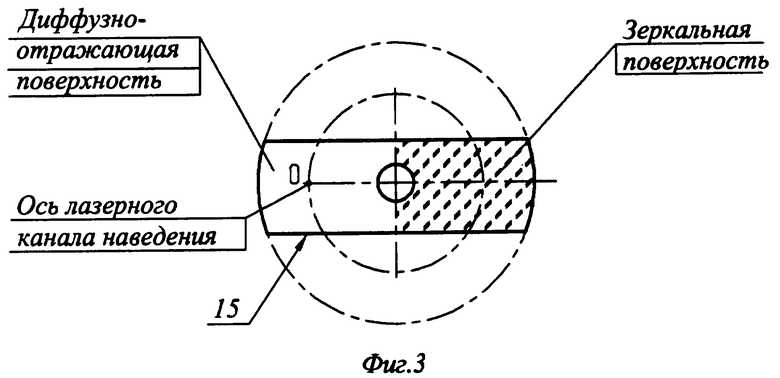
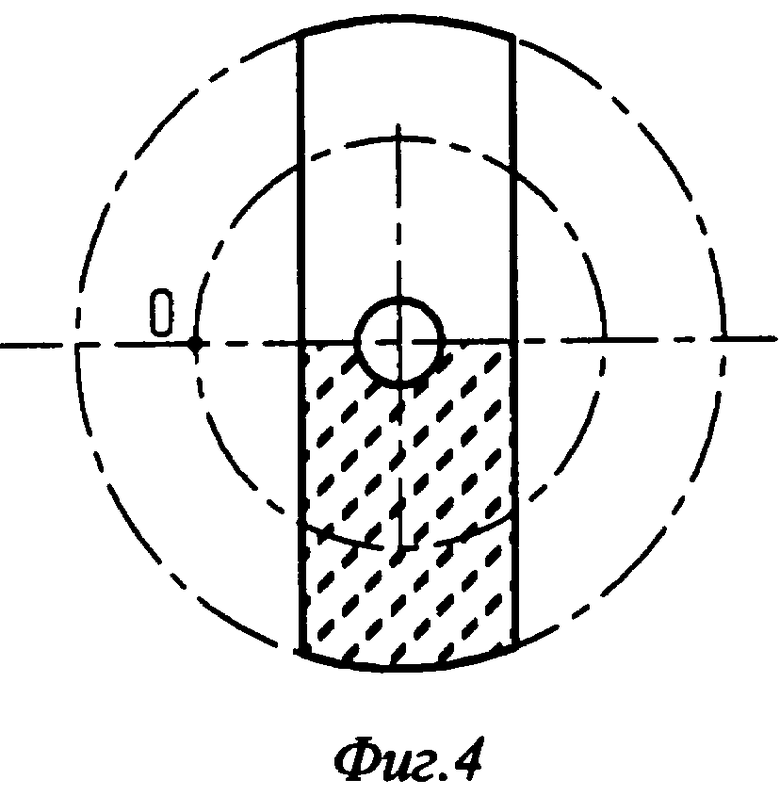
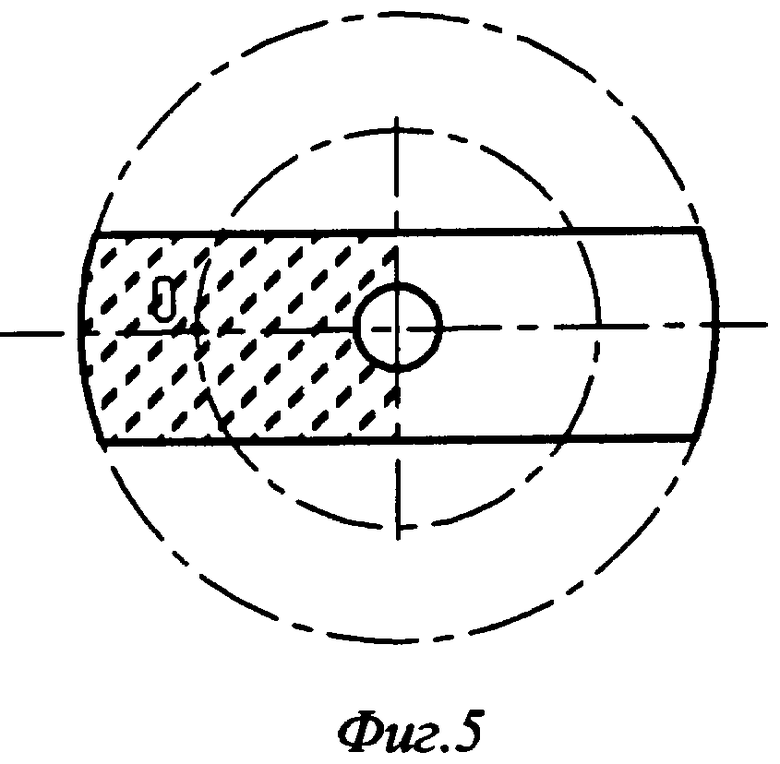
Поворотная плоскопараллельная пластина 15 с зеркальным покрытием (фиг.3-5) имеет различные размеры в двух взаимно ортогональных направлениях, имеет зеркальную и диффузно отражающую рабочие поверхности, расположенные по разные стороны от оси вращения, и может устанавливаться, поворачиваясь вокруг оси вращения в три фиксированных положения, первое из которых (фиг.3) соответствует введению диффузно отражающей поверхности в ход лучей лазерного канала наведения, второе положение (фиг.4) соответствует выведенной плоскопараллельной пластине из хода лучей лазерного канала наведения, а третье положение (фиг.5) соответствует введенной в ход лучей лазерного канала наведения зеркальной поверхности плоскопараллельной пластины.
Поворот плоскопараллельной пластины 15 осуществляется с помощью электропривода, содержащего исполнительный элемент, в качестве которого может быть использован, например, шаговый двигатель, и датчик углового положения пластины 15.
На фиг.6 изображена функциональная электрическая схема прибора, на которой отображены электрические связи импульсного 6 и непрерывного 10 лазеров, коллиматора 18 видимого излучения, осветителя 20 видимого излучения, растрового модулятора 11, панкратической системы 12, блока матричных светодиодных индикаторов 24, поворотной плоскопараллельной пластины 15, датчика 23 положений оптического блока 22, фотоприемного устройства 9 и пульта управления 16 с устройством управления и обработки электрических сигналов 17. Устройство управления и обработки электрических сигналов 17 включает также последовательный канал передачи данных 45 типа RS 422 или RS 485 для осуществления обмена данными с внешними устройствами.
Работает прицел-прибор наведения с лазерным дальномером следующим образом.
Изображение целей формируется объективом 2 после прохождения лучей света через защитное стекло 38 и отражения от поворотного зеркала 35 блока головного зеркала 34 в плоскости прицельной марки сетки 3, затем переносится оборачивающей системой 4 в плоскость промежуточного изображения, где и рассматривается глазом оператора через окуляр 5 при введенном в ход лучей света блоке линз оборачивающей системы 4, обеспечивающем больший угол поля зрения визирного канала. При обнаружении цели разворотами прицела или поворотного зеркала 35 блока головного зеркала 34 оператор добивается совмещения прицельной марки сетки 3 с центром выбранной цели, затем вводит в ход лучей света блок линз оборачивающей системы 4, обеспечивающий меньший угол поля зрения визирного канала, при котором наблюдение цели осуществляется при большем увеличении. Поворотная плоскопараллельная пластина 15 при этом развернута в исходное положение, при котором на оси канала наведения управляемого снаряда на цель находится ее зона с диффузно отражающей поверхностью (фиг.3). При этом в случае воздействия на прицел лазерных средств противодействия противника излучение лазера после отражения от диффузно отражающей поверхности поворотной плоскопараллельной пластины 15 рассеивается внутри корпуса 1 в угле, близком к 180°, а следовательно, энергия излучения, приходящаяся на чувствительную площадку фотоприемного устройства 9 уменьшается во много раз, исключая возможность его вывода из строя.
При низкой освещенности, а также при наличии пыли и дыма в направлении цели для ее лучшего наблюдения может быть использован дополнительный оптико-электронный модуль 40, например тепловизор. В этом случае цель наблюдается на экране монитора (не показан).
При необходимости измерения дальности до цели оператор осуществляет пуск импульсного лазера 6, излучение которого проходит второй спектроделитель 19, телескоп 7, первую систему выверки 8 и узким пучком кратковременно освещает выбранную оператором цель. Пуск лазерного излучения осуществляется с помощью внешнего устройства, формирующего сигнал, который поступает в устройство управления и обработки электрических сигналов 17, а затем к импульсному лазеру 6. Одновременно поворотная плоскопараллельная пластина 15 поворачивается в положение, при котором на оси канала наведения управляемого снаряда на цель оказывается ее зеркальная поверхность (фиг.5). При этом поворотная плоскопараллельная пластина 15 не перекрывает визирный канал и не мешает оператору наблюдать цель. Излучение импульсного лазера 6, отраженное от цели, проходит объектив 2, отражается от спектроделителя 14, затем от зеркал 32, зеркальной поверхности поворотной плоскопараллельной пластины 15 и попадает на чувствительную площадку фотоприемного устройства 9. Электронная система фотоприемного устройства 9 вырабатывает сигнал, временное положение которого пропорционально измеренной дальности до цели, передает его в устройство управления и обработки электрических сигналов 17, которое преобразует его к виду, удобному для восприятия оператором, и формирует необходимую информацию для отображения в плоскости блока матричных светодиодных индикаторов 24, которая проектируется в глаз оператора с помощью оптической системы 25 и окуляра 5. После завершения цикла измерения дальности поворотная плоскопараллельная пластина 15 занимает свое исходное положение (фиг.3). Так как поворотная плоскопараллельная пластина 15 вводится в рабочее положение, поворачиваясь вокруг оси, параллельной нормали к его рабочей поверхности, ошибка его позиционирования не влияет на угловое положение оси приемного канала дальномера и не приводит к случайным и систематическим погрешностям измерения дальности до цели.
При необходимости пуска управляемого снаряда оператор осуществляет пуск непрерывного лазера 10 с помощью внешнего устройства, формирующего сигнал, который поступает в устройство управления и обработки электрических сигналов 17, а затем к непрерывному лазеру 10. Излучение лазера проходит оптическую систему сопряжения 33, третий спектроделитель 21, отражается от плоского зеркала 30, проходит через информационный квадрат растрового модулятора 11, панкратическую систему 12, вторую систему выверки 13, отражается от плоского зеркала 32, затем от первого спектроделителя 14, проходит объектив 2 визирного канала, отражается от поворотного зеркала 35 и через защитное стекло 38 выходит в пространство предметов в направлении цели, формируя в пространстве предметов изменяющееся во времени лазерное поле управления, обеспечивающее наведение управляемого снаряда на цель. Поворотная плоскопараллельная пластина 15 при этом разворачивается в положение, при котором его рабочие поверхности расположены за пределами хода лучей лазерного излучателя 10, как показано на фиг.4. После завершения наведения управляемого снаряда на цель пластина 15 занимает свое исходное положение (фиг.3).
Для обеспечения высокой точности и надежности работы лазерного дальномера и обеспечения высокой точности наведения управляемого снаряда на цель оператор перед выполнением боевой работы или при техническом обслуживании прицела осуществляет контроль параллельности передающего канала лазерного дальномера и лазерного канала наведения относительно визирного канала. Для этого он вводит в ход лучей каналов оптический блок 22 (фиг.1, 2) с помощью рукоятки 42. В передающем канале лазерного дальномера включается система подсветки коллиматора 18 видимого излучения. Лучи видимого света от подсвеченной марки на сетке 28 проходят объектив 29 коллиматора 18, отражаются от второго спектроделителя 19, проходят телескоп 7, первую систему выверки 8, отражаются от отражающих граней призмы БкР-180° 26 оптического блока 22, проходят объектив 2 визирного канала, первый спектроделитель 14 и после отражения от зеркала 31 формируют изображение выверочной марки коллиматора 18 на сетке 3, где оно рассматривается оператором вместе с прицельной маркой сетки 3 через оборачивающую систему 4 и окуляр 5. Если прицельная марка не совпадает с изображением выверочной марки, то это свидетельствует о непараллельности передающего канала лазерного дальномера и визирного канала, при этом оператор поворачивает поочередно рукоятки 43 с помощью специального ключа, при этом будут перемещаться линзы первой системы выверки 8, обеспечивая малые отклонения оси передающего канала лазерного дальномера в двух взаимно ортогональных направлениях. Изображение выверочной марки коллиматора 18 видимого излучения будет перемещаться относительно прицельной марки на сетке 3. Наблюдая в окуляр, оператор добивается совмещения изображения выверочной марки 28 коллиматора 18 с прицельной маркой сетки 3, что свидетельствует об устранении непараллельности осей передающего канала лазерного дальномера и визирного канала.
После этого оператор с помощью внешнего устройства выбирает команду включения канала наведения управляемого снаряда, при этом поворотная плоскопараллельная пластина 15 устанавливается в положение (фиг.4), не препятствующее прохождению лучей света включенного осветителя 20 видимого излучения лазерного канала наведения. Это излучение осветителя 20 отражается от третьего спектроделителя 21 и зеркала 30 и подсвечивает информационный квадрат растрового модулятора 11. Лучи света от этой марки проходят панкратическую систему 12, вторую систему выверки 13, отражаются от зеркала 32, затем от первого спектроделителя 14 и выходят из объектива 2 визирного канала, отражаются от световозвращателя 27 и в обратном ходе попадают в визирный канал, проходят объектив 2, первый спектроделитель 14, отражаются от зеркала 31 и формируют на сетке 3 изображение выверочной марки лазерного канала наведения управляемого снаряда на цель. Если это изображение не совпадает с прицельной маркой визирного канала, то оператор аналогично предыдущему случаю с помощью специального ключа поворачивает рукоятки 44, каждая из которых поворачивает одну из пластин второй системы выверки 13 вокруг одной из двух взаимно ортогональных направлений, перемещая тем самым наблюдаемое изображение прицельной марки канала наведения относительно прицельной марки на сетке 3 визирного канала и добивается совмещения изображения выверочной марки лазерного канала наведения и прицельной марки сетки 3, что свидетельствует об устранении непараллельности канала наведения и визирного канала. После завершения процедуры контроля параллельности каналов и устранения их непараллельности относительно визирного канала оператор выводит из рабочего хода лучей света оптический блок 22 с помощью рукоятки 42.
Для упрощения работы многие команды оператор выбирает с помощью кнопок пульта управления 16. В их числе команда «возврат» для ускоренного возвращения панкратической системы в исходное положение в случае экстренной необходимости, включение подсветки прицельной марки визирного канала и сохранение величин настроечных параметров, ручной ввод дальности в случае невозможности использования или выхода из строя лазерного дальномера, команда на включение обогрева защитных стекол блока головного зеркала 34 и окуляра 5 и многие другие.
Работу электронного тракта устройства поясняет функциональная электрическая схема прицела (фиг.6). Центральным электронным узлом прицела-прибора наведения является устройство управления и обработки информации 17, предназначенное для сбора информации от других подсистем прибора, а также внешних устройств, ее анализа, селекции, преобразования форматов и уровней сигналов и выдачи управляющих сигналов и команд в виде, понятном для исполнительных устройств. Структурно устройство управления и обработки информации 17 состоит из двух печатных плат, основой каждой из которых являются программируемая логическая матрица и микропроцессорное устройство. Первая печатная плата принимает сигналы от датчика скорости вращения электропривода растрового модулятора 11 и датчика положения панкратической системы 12 и в свою очередь формирует сигналы управления электроприводом растрового модулятора 11, электроприводом панкратической системы 12 и осветителем 20 по командам, поступающим от второй печатной платы устройства управления и обработки информации 17.
Вторая печатная плата предназначена для обработки сигналов (команд), поступающих от датчика 23 положений оптического блока 22, источника питания импульсного лазера 6, фотоприемного устройства 9, непрерывного лазера 10, датчика положения плоскопараллельной пластины 15, внешних устройств, пульта управления 16, и в свою очередь формирует сигналы (команды) управления индикаторами блока матричных светодиодных индикаторов 24, фотоприемным устройством 9, источником питания импульсного лазера 6, непрерывным лазерным излучателем 10, электроприводом, вращающим поворотную плоскопараллельную пластину 15, осветителем коллиматора 18 видимого излучения, первой печатной платой устройства управления и обработки информации 17, а также информацию, необходимую внешним устройствам, передаваемую по последовательному каналу передачи данных 45.
Управление прицелом-прибором наведения осуществляется оператором по командам от пульта управления 16 и внешних устройств, поступающих в устройство управления и обработки электрических сигналов 17. При измерении дальности до цели команда на пуск импульсного лазера 6 приходит в устройство управления и обработки электрических сигналов 17 от внешнего устройства. При этом устройство управления и обработки электрических сигналов 17 обеспечивает включение фотоприемного устройства 9 и подготовку к приему отраженных импульсов от него. Одновременно формируется команда на поджиг лампы накачки импульсного лазера 6, которая передается в источник питания лампы накачки. Сигналы стартового и отраженного от цели импульсов с фотоприемного устройства 9 поступают в устройство управления и обработки электрических сигналов 17, где в результате цифровой обработки формируется сигнал управления матричными светодиодными индикаторами. Последний сигнал поступает в блок матричных светодиодных индикаторов 24 для последующего преобразования в световой сигнал и передачи его в глаз оператора в удобной для его восприятия форме. Одновременно информация о дальности может быть передана по последовательному каналу передачи данных 45 к внешним потребителям, в том числе к тепловизору 40 (фиг.2) для последующего отображения необходимой оператору служебной информации на мониторе.
Для обеспечения работы лазерного канала наведения управляемого снаряда на цель команда оператора при выборе данного режима работы также поступает в устройство управления и обработки электрических сигналов 17 от внешнего устройства. При этом устройство управления и обработки электрических сигналов 17 вырабатывает команду на включение электропривода растрового модулятора 11, и в процессе его работы постоянно контролирует скорость вращения его двигателя, для чего от датчика скорости вращения (на фиг.6 не показан) растрового модулятора 11 в устройство управления и обработки электрических сигналов 17 поступает сигнал. Устройство управления и обработки электрических сигналов 17 по команде от внешнего устройства вырабатывает команду на пуск непрерывного лазера 10. Одновременно это устройство вырабатывает команду на запуск электропривода панкратической системы 12 и контролирует ее положение, получая сигнал от датчика положения. При необходимости выверки каналов оператор вводит в ход лучей каналов оптический блок 22 с помощью рукоятки 42, после чего сигнал от датчика положений 23 поступает в устройство управления и обработки электрических сигналов 17, которое в свою очередь, в зависимости от команды, приходящей от внешнего устройства, формирует сигналы включения осветителя коллиматора 18 видимого излучения при выверке дальномерного канала или осветителя 20 видимого излучения при выверке лазерного канала наведения.
При выполнении различных режимов работы прицела-прибора наведения с лазерным дальномером устройство управления и обработки электрических сигналов 17 также обеспечивает подачу сигналов к электроприводу поворотной плоскопараллельной пластины 15 для его установки в соответствующее положение (фиг.6). Анализ положения поворотной плоскопараллельной пластины осуществляется от датчика положения (на фиг.6 не показан).
Таким образом, новый прицел-прибор наведения с лазерным дальномером обеспечивает повышение точности стрельбы и наведения управляемых ракет на цель, повышение надежности работы лазерного дальномера и лазерного канала наведения, а также расширение функциональных возможностей.
Источники информации
1. Патент RU №2224206 С1, МПК 7 F41G 7/26.
2. Патент BY №10829 С1, МПК G02B 23/02 - прототип.
3. Патент BY №3777 U, МПК G02B 23/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2008 |
|
RU2375665C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2007 |
|
RU2368856C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2005 |
|
RU2294516C1 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
| СПОСОБ ФОРМИРОВАНИЯ СФЕРОПАНОРАМНОГО ПОЛЯ ЗРЕНИЯ ПРИБОРОВ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2020 |
|
RU2740472C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| ДАЛЬНОМЕРНО-ВИЗИРНЫЙ ПРИБОРНЫЙ КОМПЛЕКС | 2010 |
|
RU2437051C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2307322C2 |
Прицел-прибор наведения может быть использован в системах управления огнем бронетанковой техники. Прицел-прибор наведения включает корпус и взаимно параллельные визирный канал, лазерный дальномер, включающий передающий канал, содержащий импульсный лазер и телескоп, и приемный канал, включающий объектив визирного канала, систему разделения каналов и фотоприемное устройство, лазерный канал наведения, включающий непрерывный лазер, растровый модулятор, панкратическую систему, систему разделения каналов и объектив визирного канала. Система разделения каналов содержит поворотную плоскопараллельную пластину с зеркальным и диффузно отражающим покрытиями, расположенную на оси канала наведения с возможностью ее вывода. В передающий канал лазерного дальномера введен коллиматор видимого излучения, а на его выходе размещена первая система выверки. В лазерный канал наведения введена вторая система выверки и осветитель видимого излучения. Введены оптический блок с датчиком его положений, включающий жестко связанные между собой призму типа БкР-180° и световозвращатель, блок матричных светодиодных индикаторов, пульт управления и устройство управления и обработки электрических сигналов. Непрерывный лазер закреплен на корпусе и оптически связан с растровым модулятором через отверстие в корпусе. Технический результат - повышение точности стрельбы и наведения управляемых ракет на цель, повышение надежности, расширение функциональных возможностей. 5 з.п. ф-лы, 6 ил.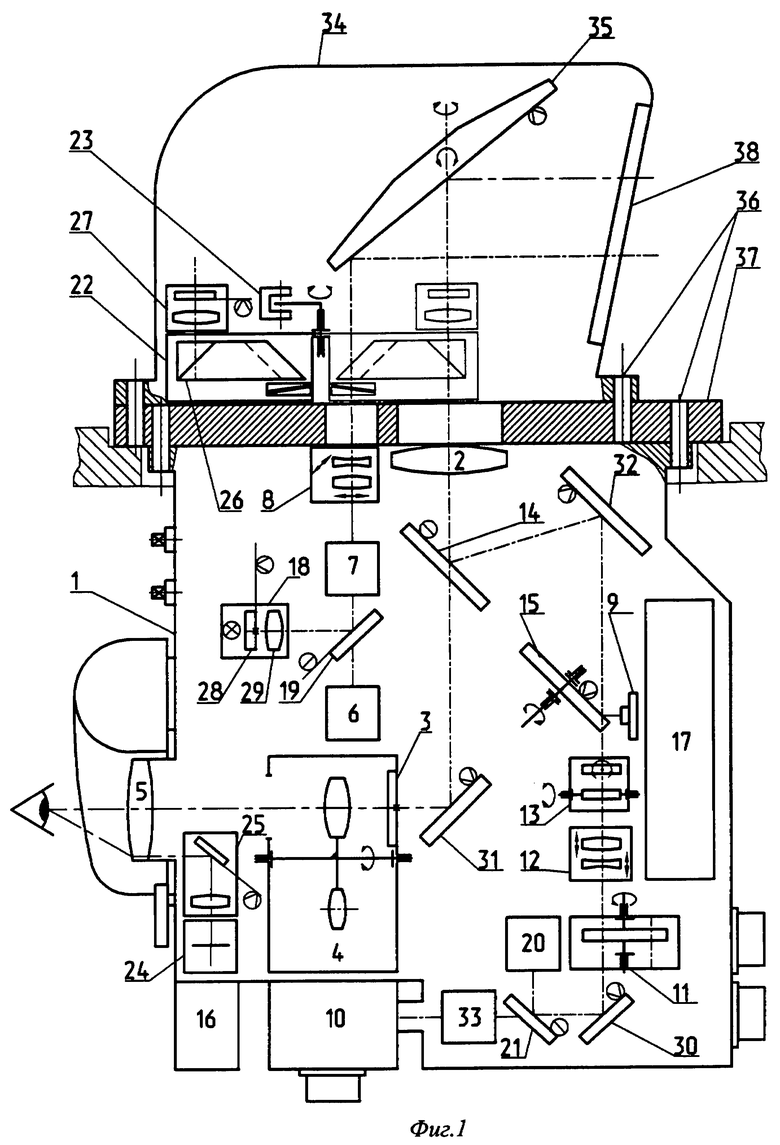
1. Прицел-прибор наведения с лазерным дальномером, содержащий корпус и жестко связанные с ним взаимно параллельные визирный канал, включающий оптически связанные объектив, сетку с прицельной маркой, оборачивающую систему и окуляр, лазерный дальномер, включающий передающий канал, содержащий последовательно установленные и оптически связанные импульсный лазер и телескоп, и приемный канал, включающий объектив визирного канала, систему разделения каналов и фотоприемное устройство, лазерный канал наведения, включающий оптически связанные и последовательно установленные непрерывный лазер, растровый модулятор, панкратическую систему, систему разделения каналов и объектив визирного канала, при этом система разделения каналов содержит оптически связанные первый спектроделитель, установленный на оси визирного канала между объективом и сеткой, и поворотную плоскопараллельную пластину с зеркальным покрытием, расположенную на оси канала наведения между первым спектроделителем и панкратической системой с возможностью ее вывода из оптического тракта путем поворота вокруг оси вращения, при этом фотоприемное устройство и панкратическая система установлены с возможностью оптической связи с объективом при нахождении поворотной плоскопараллельной пластины с зеркальным покрытием в указанном оптическом тракте и вне его соответственно, отличающийся тем, что в него введены первая система выверки, установленная на выходе передающего канала лазерного дальномера и выполненная в виде оптической афокальной системы, включающей положительную и отрицательную линзы, каждая из которых установлена с возможностью перемещения в одном из направлений, перпендикулярных оси передающего канала лазерного дальномера, при этом направления перемещения линз взаимно ортогональны, вторая система выверки, расположенная между панкратической системой и поворотной плоскопараллельной пластиной с зеркальным покрытием и выполненная в виде двух оптически связанных плоскопараллельных пластин, каждая из которых установлена с возможностью вращения вокруг оси, параллельной рабочим поверхностям соответствующей пластины, при этом оси вращения пластин взаимно ортогональны, коллиматор видимого излучения, оптически связанный с телескопом с помощью второго спектроделителя, установленного между телескопом и импульсным лазером, осветитель видимого излучения, оптически связанный с растровым модулятором посредством третьего спектроделителя, расположенного между непрерывным лазером и растровым модулятором, оптический блок с датчиком его положений, включающий жестко связанные между собой призму типа БкР-180° и световозвращатель, размещенный перед объективом визирного канала таким образом, что световозвращатель оптически связан с объективом, а входная и выходная грани призмы типа БкР-180° расположены в пределах выходного зрачка телескопа и входного зрачка объектива визирного канала соответственно, и установленный с возможностью его вывода за пределы хода рабочих лучей каналов, блок матричных светодиодных индикаторов, оптически связанный с окуляром посредством оптической системы, а также электрически связанные между собой пульт управления и устройство управления и обработки электрических сигналов, при этом импульсный и непрерывный лазеры, коллиматор видимого излучения, осветитель видимого излучения, растровый модулятор, панкратическая система, блок матричных светодиодных индикаторов, поворотная плоскопараллельная пластина с зеркальным покрытием, датчик положений оптического блока и фотоприемное устройство электрически связаны с устройством управления и обработки электрических сигналов, поворотная плоскопараллельная пластина выполнена таким образом, что зеркальное покрытие нанесено на одну половину ее рабочей поверхности, а другая половина выполнена диффузно отражающей, причем поворотная плоскопараллельная пластина может устанавливаться в три фиксированных положения, первое из которых соответствует введенной диффузно отражающей поверхности в ход лучей лазерного канала наведения, второе положение соответствует выведенной поворотной плоскопараллельной пластине из хода лучей лазерного канала наведения и третье положение соответствует введенной в ход лучей лазерного канала наведения ее зеркальной поверхности, а непрерывный лазер закреплен на внешней поверхности корпуса прицела-прибора наведения и оптически связан с растровым модулятором через отверстие в корпусе.
2. Прицел-прибор наведения с лазерным дальномером по п.1, отличающийся тем, что непрерывный лазер выполнен в виде лазера с диодной накачкой.
3. Прицел-прибор наведения с лазерным дальномером по п.2, отличающийся тем, что непрерывный лазер с диодной накачкой выполнен в виде волоконного лазера.
4. Прицел-прибор наведения с лазерным дальномером по п.1, отличающийся тем, что корпус имеет установочную поверхность с ориентирующими элементами для закрепления на ней дополнительного оптико-электронного модуля наблюдения в положении, при котором его визирная ось параллельна оси визирного канала.
5. Прицел-прибор наведения с лазерным дальномером по п.4, отличающийся тем, что в качестве оптико-электронного модуля наблюдения используется тепловизор.
6. Прицел-прибор наведения с лазерным дальномером по п.1, отличающийся тем, что устройство управления и обработки электрических сигналов включает последовательный канал связи с внешними устройствами.
| Электрический проволочный реостат | 1928 |
|
SU10829A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| СИСТЕМА НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2000 |
|
RU2189065C2 |
| US 4572625 A, 25.02.1986 | |||
| US 20050213962 A1, 29.09.2005. | |||

