ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится, в общем, к системам беспроводной связи. Более конкретно, настоящее раскрытие относится к способам и устройствам для синхронизации и обнаружения в системах беспроводной связи.
УРОВЕНЬ ТЕХНИКИ
Устройства беспроводной связи становятся более компактными и мощными, чтобы удовлетворять потребительские нужды и повышать портативность и удобство. Потребители становятся зависимыми от устройств беспроводной связи, таких как сотовые телефоны, персональные цифровые устройства (PDA), дорожные компьютеры и т.п. Потребители ожидают надежное обслуживание, расширенные зоны покрытия и расширенную функциональность. Устройства беспроводной связи могут упоминаться как мобильные станции, станции, терминалы доступа, пользовательские терминалы, терминалы, абонентские модули, абонентские устройства и т.д.
Система беспроводной связи может одновременно поддерживать связь для нескольких устройств беспроводной связи. Устройство беспроводной связи может обмениваться данными с одной или более базовых станций (которые альтернативно могут упоминаться как точки доступа, узлы B и т.д.) через передачи по восходящей линии связи и нисходящей линии связи. Восходящая линия связи (или обратная линия связи) упоминается как линия связи от устройств беспроводной связи к базовым станциям, а нисходящая линия связи (или прямая линия связи) упоминается как линия связи от базовых станций к устройствам беспроводной связи.
Системы беспроводной связи могут быть системами множественного доступа, допускающими поддержку связи с несколькими пользователями посредством совместного использования доступных системных ресурсов (к примеру, полосы пропускания и мощности передачи). Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA) и системы множественного доступа с ортогональным частотным разделением каналов (FDMA).
Как указано выше, настоящее раскрытие сущности, в общем, относится к системам беспроводной связи. Более конкретно, настоящее раскрытие сущности относится к способам и устройствам для синхронизации и обнаружения в системах беспроводной связи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует пример системы беспроводной связи;
фиг.2 иллюстрирует пример передающего устройства и пример приемного устройства, которые могут использоваться в рамках системы беспроводной связи, которая использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) и множественный доступ с ортогональным частотным разделением каналов (OFDMA);
фиг.3A-3D иллюстрируют пример структуры кадра для системы беспроводной связи, которая использует OFDM/OFDMA;
фиг.4 иллюстрирует пример кадра OFDMA в режиме дуплекса с временным разделением каналов;
фиг.5A и 5B иллюстрируют примеры последовательностей преамбул, которые могут быть заданы для системы беспроводной связи, которая использует OFDM/OFDMA;
фиг.6 показывает пример структуры преамбулы нисходящей линии связи в частотной области для системы беспроводной связи, которая использует OFDM/OFDMA;
фиг.7 иллюстрирует пример префикса кадра нисходящей линии связи;
фиг.8 иллюстрирует пример способа синхронизации и обнаружения, который может выполняться посредством беспроводного устройства в системе беспроводной связи, которая использует OFDM/OFDMA;
фиг.8A иллюстрирует блоки "средство плюс функция", соответствующие способу, показанному на фиг.8;
фиг.9 и 9A иллюстрируют другой пример способа синхронизации и обнаружения, который может выполняться посредством беспроводного устройства в системе беспроводной связи, которая использует OFDM/OFDMA;
фиг.10 и 10A иллюстрируют блоки "средство плюс функция", соответствующие способу, показанному на фиг.9 и 9A;
фиг.11 иллюстрирует пример архитектуры синхронизации и обнаружения для беспроводного устройства в системе беспроводной связи, которая использует OFDM/OFDMA; и
фиг.12 иллюстрирует различные компоненты, которые могут быть использованы в беспроводном устройстве.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Раскрывается способ синхронизации и обнаружения в беспроводном устройстве. Способ может включать в себя выполнение приблизительного обнаружения и синхронизации относительно принимаемого сигнала. Способ также может включать в себя выполнение точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом. Результаты приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Способ также может включать в себя выполнение обработки режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто.
Также раскрывается беспроводное устройство, которое выполняет синхронизацию и обнаружение относительно принимаемого сигнала. Беспроводное устройство может включать в себя компонент приблизительного обнаружения и синхронизации, который выполняет приблизительное обнаружение и синхронизацию относительно принимаемого сигнала. Беспроводное устройство также может включать в себя компонент точного обнаружения и синхронизации, который выполняет точное обнаружение и синхронизацию для вхождения в синхронизм с принимаемым сигналом. Результаты приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Беспроводное устройство также может включать в себя компонент обработки режима отслеживания, который выполняет обработку режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто.
Также раскрывается устройство, которое выполняет синхронизацию и обнаружение относительно принимаемого сигнала. Устройство может включать в себя средство для выполнения приблизительного обнаружения и синхронизации относительно принимаемого сигнала. Устройство также может включать в себя средство для выполнения точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом. Результаты приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Устройство также может включать в себя средство для выполнения обработки режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто.
Также раскрывается компьютерный программный продукт для выполнения синхронизации и обнаружения относительно принимаемого сигнала. Компьютерный программный продукт может включать в себя машиночитаемый носитель, на котором содержатся инструкции. Инструкции могут включать в себя код для выполнения приблизительного обнаружения и синхронизации относительно принимаемого сигнала. Инструкции также могут включать в себя код для выполнения точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом. Результаты приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Инструкции также могут включать в себя код для выполнения обработки режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Способы и устройства настоящего раскрытия сущности могут быть использованы в системе широкополосной беспроводной связи. Термин "широкополосный беспроводной" упоминается как технология, которая предоставляет доступ к беспроводным сетям, сетям телефонной связи, Интернету и/или сетям передачи данных в данной области.
WiMAX, который означает стандарт общемировой совместимости широкополосного беспроводного доступа, является основанной на стандартах широкополосной беспроводной технологией, которая предоставляет широкополосные соединения с высокой пропускной способностью на большие расстояния. Сегодня предусмотрено два основных варианта применения WiMAX: WiMAX для стационарных устройств и WiMAX для мобильных устройств. Варианты применения WiMAX для стационарных устройств имеют тип "точка-многоточка" и предоставляют широкополосный доступ в дома и офисы. WiMAX для мобильных устройств предлагает полную мобильность сотовых сетей на скоростях широкополосной передачи.
WiMAX для мобильных устройств основан на технологии OFDM (мультиплексирование с ортогональным частотным разделением каналов) и OFDMA (множественный доступ с ортогональным частотным разделением каналов). OFDM - это технология цифровой модуляции с несколькими несущими, которая с недавних пор нашла широкое применение во множестве систем связи с высокой скоростью передачи данных. В OFDM поток передаваемых битов разделяется на несколько субпотоков с меньшей скоростью. Каждый субпоток модулируется с помощью одной из нескольких ортогональных поднесущих и отправляется по одному из множества параллельных подканалов. OFDMA - это технология множественного доступа, в которой пользователям назначаются поднесущие в различных временных квантах. OFDMA является гибкой технологией множественного доступа, которая может приспосабливать для множества пользователей различные приложения, скорости передачи данных и требования по качеству обслуживания.
Быстрое развитие технологий беспроводной связи по Интернету приводит к возрастающей потребности в высоких скоростях передачи данных в области техники услуг беспроводной связи. OFDM/OFDMA-системы сегодня рассматриваются как одна из наиболее перспективных исследовательских областей и как ключевая технология для следующего поколения беспроводной связи. Это обусловлено тем фактом, что схемы OFDM/OFDMA-модуляции могут предоставлять множество преимуществ, таких как эффективность модуляции, эффективность использования спектра, гибкость и сильная устойчивость к многолучевому распространению по сравнению с традиционными схемами модуляции с одной несущей.
IEEE 802.16x является организацией-разработчиком новых стандартов, чтобы задавать радиоинтерфейс для систем на основе стандарта широкополосного беспроводного доступа (BWA) для стационарных и мобильных устройств. IEEE 802.16x
приняла документ "IEEE P802.16-REVd/D5-2004" в мае 2004 года для BWA-систем для стационарных устройств и опубликовала документ "IEEE P802.16e/D12 Oct. 2005" в октябре 2005 года для BWA-систем для мобильных устройств. Эти два стандарта задали четыре различных физических уровня (PHY) и один уровень управления доступом к среде (MAC). Физический уровень OFDM и OFDMA из четырех физических уровней является самым популярным в областях BWA для стационарных и мобильных устройств соответственно.
Фиг.1 иллюстрирует пример системы 100 беспроводной связи. Система 100 беспроводной связи может быть системой 100 широкополосной беспроводной связи. Система 100 беспроводной связи предоставляет связь для ряда сот 102, каждая из которых обслуживается посредством базовой станции 104. Базовая станция 104 может быть стационарной станцией, которая обменивается данными с пользовательскими терминалами 106. Базовая станция 104 альтернативно может упоминаться как точка доступа, узел B или некоторый другой термин.
Фиг.1 показывает различные пользовательские терминалы 106, рассредоточенные по всей системе 100. Пользовательские терминалы 106 могут быть фиксированными (т.е. стационарными) или мобильными. Пользовательские терминалы 106 альтернативно могут упоминаться как удаленные станции, терминалы доступа, терминалы, абонентские модули, мобильные станции, станции, абонентские устройства и т.д. Пользовательские терминалы 106 могут быть беспроводными устройствами, такими как сотовые телефоны, персональные цифровые устройства (PDA), карманные устройства, беспроводные модемы, дорожные компьютеры, персональные компьютеры и т.д.
Множество алгоритмов и способов может использоваться для передач в системе 100 беспроводной связи между базовыми станциями 104 и пользовательскими терминалами 106. Например, сигналы могут отправляться и приниматься между базовыми станциями 104 и пользовательскими терминалами 106 в соответствии с OFDM/OFDMA-технологиями. Если это имеет место, система 100 беспроводной связи может упоминаться как OFDM/OFDMA-система 100.
Линия связи, которая упрощает передачу от базовой станции 104 в пользовательский терминал 106, может упоминаться как нисходящая линия 108 связи, а линия связи, которая упрощает передачу от пользовательского терминала 106 в базовую станцию 104, может упоминаться как восходящая линия 110 связи. Альтернативно, нисходящая линия 108 связи может упоминаться как прямая линия связи или прямой канал, а восходящая линия 110 связи может упоминаться как обратная линия связи или обратный канал.
Сота 102 может разделяться на несколько секторов 112. Сектор 112 является физической зоной покрытия в рамках соты 102. Базовые станции 104 в рамках OFDM/OFDMA-системы 100 могут использовать антенны, которые концентрируют поток мощности в пределах конкретного сектора 112 соты 102. Такие антенны могут упоминаться как направленные антенны.
Фиг.2 иллюстрирует пример передающего устройства 202, которое может использоваться в рамках системы 100 беспроводной связи, которая использует OFDM/OFDMA. Передающее устройство 202 может быть реализовано в базовой станции 104 для передачи данных 206 в пользовательский терминал 106 по нисходящей линии 108 связи. Передающее устройство 202 также может быть реализовано в пользовательском терминале 106 для передачи данных 206 в базовую станцию 104 по восходящей линии 110 связи.
Данные 206, которые должны передаваться, показаны как предоставляемые в качестве ввода в преобразователь 208 из последовательной формы в параллельную (S/P). S/P-преобразователь 208 разбивает передаваемые данные на N параллельных потоков 210 данных.
N параллельных потоков 210 данных затем могут предоставляться в качестве ввода в модуль 212 преобразования. Модуль 212 преобразования преобразует N параллельных потоков 210 данных в N точек созвездия. Преобразование может осуществляться с помощью некоторого созвездия модуляции, такого как двоичная фазовая манипуляция (BPSK), квадратурная фазовая модуляция (QPSK), 8-позиционная фазовая манипуляция (8PSK), квадратурная амплитудная модуляция (QAM) и т.д. Таким образом, модуль 212 преобразования выводит N параллельных потоков 216 символов, причем каждый поток 216 символов соответствует одной из N ортогональных поднесущих обратного быстрого преобразования Фурье (IFFT) 220. Эти N параллельных потоков 216 символов представляются в частотной области и могут быть преобразованы в N параллельных потоков 218 выборок временной области посредством IFFT-компонента 220.
Далее приводится краткое примечание по терминологии. N параллельных модуляций в частотной области равны N символов модуляции в частотной области, которые равны N преобразованиям плюс N-точечных IFFT в частотной области, которые равны одному (полезному) OFDM-символу во временной области, который равен N выборок во временной области. Один OFDM-символ во временной области, Ns, равен Ncp (число защитных выборок в расчете на один OFDM-символ) + N (число полезных выборок в расчете на один OFDM-символ).
N параллельных потоков 218 выборок временной области могут быть преобразованы в поток 222 OFDM/OFDMA-символов посредством преобразователя 224 из параллельной формы в последовательную (P/S). Компонент 226 вставки защитных интервалов может вставлять защитный интервал между последовательными OFDM/OFDMA-символами в потоке 222 OFDM/OFDMA-символов. Вывод компонента 226 вставки защитных интервалов затем может быть преобразован с повышением частоты в требуемую полосу частот передачи посредством радиочастотного (RF) входного каскада 228. Антенна 230 затем может передавать результирующий сигнал 232.
Фиг.2 также иллюстрирует пример приемного устройства 204, которое может использоваться в рамках системы 100 беспроводной связи, которая использует OFDM/OFDMA. Приемное устройство 204 может быть реализовано в пользовательском терминале 106 для приема данных 232' от базовой станции 104 по нисходящей линии 108 связи. Приемное устройство 204 также может быть реализовано в базовой станции 104 для приема данных 232' от пользовательского терминала 106 по восходящей линии 110 связи.
Передаваемый сигнал 232 показан как продвигающийся по беспроводному каналу 234. Когда сигнал 232' принимается посредством антенны 230', принимаемый сигнал 232' может быть преобразован с понижением частоты в сигнал в полосе модулирующих частот посредством входного RF-каскада 228'. Компонент 226' удаления защитных интервалов затем может удалять защитный интервал, который вставлен между OFDM/OFDMA-символами посредством компонента 226 вставки защитных интервалов.
Вывод компонента 226' удаления защитных интервалов может предоставляться в S/P-преобразователь 224'. S/P-преобразователь 224' может разделять поток 222' OFDM/OFDMA-символов на N параллельных потоков 218' выборок временной области, каждый из которых соответствует одной из N ортогональных поднесущих. Компонент 220' быстрого преобразования Фурье (FFT) преобразует N параллельных потоков 218' выборок временной области в частотную область и выводит N параллельных потоков 216' выборок частотной области.
Модуль 212' обратного преобразования выполняет инверсию операции символьного преобразования, которая выполнена посредством модуля 212 преобразования, тем самым выводя N параллельных потоков 210' данных. P/S-преобразователь 208' комбинирует N параллельных потоков 210' данных в один поток 206' данных. В идеале, этот поток 206' данных соответствует данным 206, которые предоставлены в качестве ввода в передающее устройство 202.
Фиг.3A иллюстрирует пример кадра 306, который может быть передан от базовой станции 104 в пользовательский терминал 106 по нисходящей линии 108 связи в рамках системы 100 беспроводной связи, которая использует OFDM/OFDMA. OFDM/OFDMA-кадр 306 показан относительно временной оси 308. OFDM/OFDMA-кадр 306 показан с одним символом 310 преамбулы и несколькими символами 312 данных. Хотя только один символ 310 преамбулы показан на фиг.3A, OFDM/OFDMA-кадр 306 может включать в себя несколько символов 310 преамбулы.
Фиг.3B и 3C иллюстрируют примеры представлений в частотной области символа 310 преамбулы. Эти представления в частотной области показаны относительно оси 316 поднесущих. Область 318 используемых поднесущих показана. Две защитные области 320 также показаны.
На фиг.3B область 318 используемых поднесущих включает в себя пилотные поднесущие 314a, чередуемые с немодулированными поднесущими 314b. На фиг.3C каждая поднесущая 314 в области 318 используемых поднесущих является пилотной поднесущей 314a.
Фиг.3D иллюстрирует пример представления в частотной области символа 312 данных. Символ 312 данных включает в себя и поднесущие 314c данных и пилотные поднесущие 314a. Приемное устройство 204 может выполнять оценку канала с использованием пилотных поднесущих 314a символа 310 преамбулы и/или пилотных поднесущих 314a символа 312 данных.
Число поднесущих 314 в рамках OFDM/OFDMA-системы 100 может быть равным числу FFT-точек. В рамках системы 100 беспроводной связи, которая использует OFDM/OFDMA, все доступные поднесущие 314 могут не использоваться. В частности, защитные поднесущие 314d в защитных областях 320 могут исключаться. На фиг.3B-3D защитные поднесущие 314d показаны рядом с нижними и верхними полосами частот. Эти защитные поднесущие 314d не могут выделяться для поднесущих 314c данных или пилотных поднесущих 314a.
Фиг.4 иллюстрирует пример OFDMA-кадра 402 (только с обязательной зоной) в режиме дуплекса с временным разделением каналов (TDD). Ось X 404 обозначает временную ось или ось OFDMA-символов, а ось Y 406 обозначает частотную ось или ось подканалов. Первый символ кадра 402 является преамбулой 408 нисходящей линии связи, и большая часть опорного синхронизирующего сигнала основана на этой преамбуле 408. Первый канал субкадра нисходящей линии связи называется заголовком 410 управления кадром (FCH), а содержимое FCH 410 называется префиксом кадра нисходящей линии связи (DLFP). Следующие пакеты 412 FCH 410 могут включать в себя сообщения подсистемы мобильных приложений (MAP), управляющие сообщения, пользовательские пакеты и т.д.
Радиосигналы нисходящей линии связи от базовых станций 104 в пользовательские терминалы 106 могут включать в себя сигналы речевого трафика или трафика данных, или и то и другое. Помимо этого, базовые станции 104, в общем, передают преамбулы 408 в своих радиосигналах нисходящей линии связи, чтобы идентифицировать для пользовательских терминалов 106 соответствующие соты 102 и соответствующие сегменты в сотах 102, в которые направляются радиосигналы нисходящей линии связи. Такая преамбула 408 от базовой станции 104 дает возможность пользовательскому терминалу 106 синхронизировать свое приемное устройство 204 во времени и по частоте с наблюдаемым сигналом нисходящей линии связи и обнаруживать идентификационные данные базовой станции 104, которая передает сигнал нисходящей линии связи.
В системе 100 беспроводной связи, которая выполнена в соответствии с IEEE802.16e,
имеется три типа наборов несущих преамбул, которые могут быть заданы. Наборы несущих преамбул могут быть заданы посредством выделения различных поднесущих 314, которые могут модулироваться с использованием усиленной BPSK-модуляции с помощью конкретного псевдошумового (PN) кода. Наборы несущих преамбул могут быть заданы с помощью следующей формулы:
В уравнении (1) член  представляет все поднесущие 314, выделенные конкретной преамбуле 408, на основе индекса полезной поднесущей (т.е. индекса, который назначается поднесущим 314 в области 318 используемых поднесущих). Член
представляет все поднесущие 314, выделенные конкретной преамбуле 408, на основе индекса полезной поднесущей (т.е. индекса, который назначается поднесущим 314 в области 318 используемых поднесущих). Член  представляет номер набора несущих преамбул с индексами 0,…, 2, который соответствует сегменту сектора 112. Член
представляет номер набора несущих преамбул с индексами 0,…, 2, который соответствует сегменту сектора 112. Член  представляет пробегающий индекс от 0 до
представляет пробегающий индекс от 0 до  , где
, где  - это длина PN-кода. Например,
- это длина PN-кода. Например, =284 в FFT-режиме
=284 в FFT-режиме  =1024.
=1024.
Каждый сегмент использует преамбулу 408, соответствующую набору несущих из трех доступных наборов несущих, следующим образом: сегмент 0 использует набор 0 несущих преамбул, сегмент 1 использует набор 1 несущих преамбул, и сегмент 2 использует набор 2 несущих преамбул. (В случае сегмента 0, DC-несущая вообще не модулируется и соответствующий PN отбрасывается. Следовательно, DC-несущая обнуляется. Для символа 408 преамбулы предусмотрено 86 поднесущих 314 в защитных областях 320 в левой стороне и в правой стороне спектра). Для FFT-размера в 1024 PN-последовательность, модулирующая набор несущих преамбул, задается в описании стандарта для OFDM/OFDMA-системы согласно IEEE802.16e.
Фиг.5A и 5B иллюстрируют примеры последовательностей 506a, 506b преамбул, которые могут быть заданы для системы 100 беспроводной связи, которая выполнена в соответствии с IEEE 802.16e. Эти последовательности 506a, 506b преамбул задаются в описании стандарта для OFDM/OFDMA-системы согласно IEEE 802.16e.
Последовательности 506a преамбул, показанные на фиг.5A, соответствуют OFDM/OFDMA-системе согласно IEEE 802.16e, которая использует 1024 поднесущие. В случае сегмента 0, DC-несущая может вообще не модулироваться, и соответствующий PN может отбрасываться; следовательно, DC-несущая может всегда обнуляться. Для символа 408 преамбулы может быть 86 поднесущих 314 в защитных областях 320 в левой стороне и в правой стороне спектра.
Последовательности 506b преамбул, показанные на фиг.5B, соответствуют OFDM/OFDMA-системе согласно IEEE 802.16e, которая использует 512 поднесущих. В случае сегмента 1, DC-несущая может вообще не модулироваться, и соответствующий PN может отбрасываться; следовательно, DC-несущая может всегда обнуляться. Для символа 408 преамбулы может быть 42 поднесущие 314 в защитных областях 320 в левой стороне и в правой стороне спектра.
Каждая последовательность 506a, 506b преамбул ассоциирована с сегментом 510a, 510b. Каждая последовательность 506a, 506b преамбул также ассоциирована с сотой 102, которая идентифицируется посредством идентификатора 512a, 512b соты (IDcell). Каждая последовательность 506a, 506b преамбул также ассоциирована с индексом 516a, 516b, который может упоминаться как индекс 516a, 516b преамбулы.
Последовательность преамбул (PN-последовательность) 506, модулирующая наборы несущих преамбул, задается в описании стандарта для OFDM/OFDMA-системы согласно IEEE 802.16e. Последовательность 506 преамбул, которая модулируется, зависит от сегмента 510, который используется, и параметра 512 IDcell. Заданная последовательность 506 преамбул может преобразовываться в поднесущие 314 преамбулы в порядке возрастания. Таблицы, показанные на фиг.5A и 5B, включают в себя последовательности 506 преамбул в шестнадцатеричном формате. Значение PN может получаться посредством преобразования последовательности в двоичную последовательность (Wk) и преобразования PN от старшего бита (MSB) каждого символа в младший бит (LSB). "0" может преобразовываться в "+1", а "1" может преобразовываться в "-1". Например, для индекса=0, сегмента=0, Wk=110000010010…, и преобразование может быть следующим: -1 -1 +1 +1 +1 +1 +1 -1 +1 +1 -1 +1…. Всего 114 PN-последовательностей (Npn=114) задается в описании стандарта, или по 38 PN-последовательностей для каждого сегмента (Npnseg=38, Nseg=3).
Фиг.6 показывает представление в частотной области преамбулы 608 нисходящей линии связи для OFDM/OFDMA-системы согласно IEEE802.16e с FFT-размером в 1024. На фиг.6 N означает нулевую поднесущую 314, S0 означает поднесущую 314, которая принадлежит сегменту 0, S1 означает поднесущую 314, которая принадлежит сегменту 1, S2 означает поднесущую 314, которая принадлежит сегменту 2, а dc означает DC-поднесущую 314. Поскольку FFT-размер составляет 1024, имеется 1024 поднесущих 314, и эти поднесущие 314 имеют номера от SC1 до SC1024.
Фиг.7 иллюстрирует 24-битовый префикс 702 кадра нисходящей линии связи (DLFP). Заголовок 410 управления кадром (FCH), который пояснен выше, является важным каналом (или пакетом) системы согласно IEEE802.16d/e. Содержимое FCH 410 называется префиксом 702 кадра нисходящей линии связи (DLFP). DLFP 702 является структурой данных, которая передается в начале каждого кадра 402. DLFP 702 содержит информацию, касающуюся текущего кадра 402, и преобразуется в FCH 410. Успешное декодирование FCH/DLFP 410, 702 может быть важным для того, чтобы обрабатывать весь кадр 402.
Чтобы декодировать сообщения или пакеты 412 нисходящей линии связи, отправляемые посредством базовой станции 104, пользовательский терминал 106 может выполнять следующие функции перед FCH-декодированием: автоматическая регулировка усиления (AGC), обнаружение сигналов нисходящей линии связи, обнаружение преамбул нисходящей линии связи, частотная синхронизация (дробная и целочисленная), обнаружение синхронизации OFDM-символов, обнаружение сегментов и обнаружение последовательностей преамбул.
Настоящее раскрытие сущности, в общем, относится к архитектуре синхронизации и обнаружения для системы 100 беспроводной связи, которая использует OFDM/OFDMA. Предложенная схема может включать в себя три главных этапа. Первый этап может включать в себя процессы приблизительного обнаружения и синхронизации, которые могут включать в себя приблизительное обнаружение сигналов, приблизительное обнаружение преамбул, приблизительное обнаружение символьной синхронизации и оценку дробного сдвига частоты. Второй этап может включать в себя процессы точного обнаружения и синхронизации, которые могут включать в себя верификацию обнаружения сигналов, верификацию обнаружения преамбул и точное обнаружение символьной синхронизации. Третий этап может включать в себя процессы идентификации последовательностей преамбул и оценки целочисленного сдвига частоты, которые могут включать в себя идентификацию последовательностей преамбул, оценку целочисленного сдвига частоты, извлечение сегментов и оценку сдвига частоты дискретизации. Процесс автоматической регулировки усиления (AGC) также может быть включен как один из процессов синхронизации, и процесс синхронизации физического уровня (PHY) также может быть включен для установления PHY-синхронизации нисходящей линии связи, которая является конечной стадией синхронизации PHY-уровня. Помимо этого, настоящее раскрытие сущности также включает в себя схему поиска соседних сот для целей передачи обслуживания.
Фиг.8 иллюстрирует пример способа 800 синхронизации и обнаружения, который может выполняться посредством беспроводного устройства (к примеру, пользовательского терминала 106) в системе 100 беспроводной связи, которая использует OFDM/OFDMA.
Способ 800 может включать в себя выполнение 802 приблизительного обнаружения сигналов относительно принимаемого сигнала, выполнение 804 приблизительного обнаружения преамбул относительно принимаемого сигнала, выполнение 806 приблизительного обнаружения границ символов относительно принимаемого сигнала и выполнение 808 оценки дробного сдвига несущей частоты (CFO) относительно принимаемого сигнала. Совместно, эти этапы 802, 804, 806, 808 могут упоминаться как выполнение 810 приблизительного обнаружения и синхронизации относительно принимаемого сигнала.
Способ 800 также может включать в себя выполнение 812 точного обнаружения сигналов относительно принимаемого сигнала, выполнение 814 точного обнаружения преамбул относительно принимаемого сигнала и выполнение 816 точного обнаружения границ символов относительно принимаемого сигнала. Совместно, эти этапы 812, 814, 816 могут упоминаться как выполнение 818 точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом.
Результаты, которые определены из выполнения 810 приблизительного обнаружения и синхронизации, могут использоваться для выполнения 818 точного обнаружения и синхронизации. Например, выполнение 812 точного обнаружения сигналов может включать в себя верификацию результата, который получен посредством выполнения 802 приблизительного обнаружения сигналов. Аналогично, выполнение 814 точного обнаружения преамбул может включать в себя верификацию результата, который получен посредством выполнения 804 приблизительного обнаружения преамбул.
Когда вхождение в синхронизм с принимаемым сигналом завершено, может осуществляться переход в режим отслеживания. В частности, способ 800 затем может включать в себя выполнение 820 идентификации последовательностей преамбул, выполнение 822 оценки целочисленного сдвига несущей частоты (CFO), выполнение 824 оценки сегментов, выполнение 826 оценки сдвига частоты дискретизации (SFO) и выполнение 828 синхронизации физического уровня. Совместно, эти этапы 820, 822, 824, 826, 828 могут упоминаться как выполнение 830 обработки режима отслеживания.
Способ 800 по фиг.8, описанный выше, может выполняться посредством различного аппаратного и/или программного компонента(ов) и/или модуля(ей), соответствующего блокам 800A "средство плюс функция", проиллюстрированным на фиг.8A. Другими словами, блоки 802-828, проиллюстрированные на фиг.8, соответствуют блокам 802A-828A "средство плюс функция", проиллюстрированным на фиг.8A.
Фиг.9 и 9A иллюстрируют пример способа 900 синхронизации и обнаружения, который может выполняться посредством беспроводного устройства (к примеру, пользовательского терминала 106) в системе 100 беспроводной связи, которая использует OFDM/OFDMA. Этот способ 900 является примером возможной реализации способа 800 синхронизации и обнаружения, который показан на фиг.8.
Способ 900 включает в себя выполнение 902 задания и регулирования параметров. Оно может включать в себя задание полосы пропускания, задание длительности кадра, задание размера быстрого преобразования Фурье (FFT), задание Gr, задание автоматической регулировки усиления (AGC), задание и запуск таймеров, задание параметров режима вхождения в синхронизм, задание параметров режима отслеживания, задание параметров режима синхронизации физического уровня и т.д. Термин "Gr" упоминается как защитное отношение, которое является одним из 1/32, 1/16, 1/8 и 1/4 полезного OFDMA-символа.
Способ 900 также включает в себя переход 904 в режим 906 вхождения в синхронизм или режим 908 отслеживания. В режиме 906 вхождения в синхронизм, информация синхронизации и информация базовой станции могут не быть доступными. Некоторые параметры, такие как пороговое значение(я), синхронизация, последовательность 506 преамбул и сдвиг частоты, могут быть заданы на основе управления параметрами режима вхождения в синхронизм. В режиме 906 вхождения в синхронизм детекторы и синхронизаторы могут продолжать выполнять процессы, идентичные выполняемым в предыдущих операциях, для всех возможных гипотез синхронизации до тех пор, пока вхождение в синхронизм не верифицировано.
В режиме 908 отслеживания некоторая информация синхронизации и частоты может быть доступной, так что информация может использоваться в последующих процессах. Некоторые параметры, так как пороговое значение(я), синхронизация, последовательность 506 преамбул и сдвиг частоты, могут быть заданы на основе управления параметрами режима отслеживания. Эти параметры могут подстраиваться во времени. В режиме 908 отслеживания детекторы и синхронизаторы могут продолжать выполнять идентичные процессы посредством обновления параметров синхронизации и обнаружения к значениям, полученным во время точной синхронизации и обнаружения. Гипотезы синхронизации могут сужаться все более к данному диапазону во времени.
Способ 900 также включает в себя выполнение 910 приблизительного обнаружения и синхронизации. Как указано выше, приблизительное обнаружение и синхронизация может включать в себя приблизительное обнаружение сигналов, приблизительное обнаружение преамбул, приблизительное обнаружение границ символов и оценку дробного CFO.
Когда поступающий сигнал распознан 912 в качестве варианта, затем вариант может доставляться 914 в соответствующий компонент(ы) для точного обнаружения и синхронизации со связанной информацией, такой как сдвиг синхронизации и частоты. Для целей выполнения 910 приблизительного обнаружения и синхронизации поступающий сигнал может обрабатываться на посимвольной основе, тем самым предоставляя возможность обработки в реальном времени. В одной реализации каждый поступающий OFDMA-символ может рассматриваться 912 в качестве варианта, и все варианты могут доставляться 914 в соответствующий компонент(ы) для точного обнаружения и синхронизации.
Определенная информация может определяться в качестве части выполнения 910 приблизительного обнаружения и синхронизации. Например, средняя мощность принимаемого сигнала может определяться. Она может упоминаться в данном документе как AP. В качестве другого примера, может определяться автокорреляция принимаемого сигнала с использованием свойства циклического префикса (CP) преамбулы. Она может упоминаться в данном документе как CORRcp. Как AP, так и CORRcp могут определяться на непрерывной основе. CORRcp может определяться во временной области.
Как указано выше, выполнение 910 приблизительного обнаружения и синхронизации может включать в себя выполнение приблизительного обнаружения сигналов. Как AP, так и CORRcp могут использоваться в качестве части схемы порогового обнаружения для целей приблизительного обнаружения сигналов. Например, измеренные значения AP и CORRcp могут сравниваться с заранее определенными пороговыми значениями для целей приблизительного обнаружения сигналов.
Как указано выше, выполнение 910 приблизительного обнаружения и синхронизации может включать в себя выполнение приблизительного обнаружения преамбул. Как AP, так и CORRcp могут использоваться в качестве части схемы порогового обнаружения для целей приблизительного обнаружения преамбул. Например, измеренные значения AP и CORRcp могут сравниваться с заранее определенными пороговыми значениями для целей приблизительного обнаружения преамбул. Кроме того, поскольку мощность может увеличиваться (к примеру, примерно на 4,26 дБ) для передачи преамбулы 408, это также может учитываться для целей приблизительного обнаружения преамбул.
Все возможные варианты преамбул могут доставляться 914 в соответствующий компонент(ы) для целей точного обнаружения и синхронизации. Это может осуществляться на непрерывной основе.
Как указано выше, выполнение 910 приблизительного обнаружения и синхронизации может включать в себя выполнение приблизительного обнаружения границ символов. Как AP, так и CORRcp могут использоваться в качестве части схемы порогового обнаружения для целей приблизительного обнаружения границ символов. Например, измеренные значения AP и CORRcp могут сравниваться с заранее определенными пороговыми значениями для целей приблизительного обнаружения границ символов. Приблизительное обнаружение границ символов может включать в себя определение возможного диапазона для начальной гипотезы синхронизации. Эта начальная гипотеза синхронизации может упоминаться в данном документе как n0. Этот диапазон может доставляться 914 в соответствующий компонент(ы) для целей точного обнаружения и синхронизации.
Далее приводится краткое пояснение того, как определяются пороговые значения для приблизительного обнаружения сигналов, приблизительного обнаружения преамбул и приблизительного обнаружения границ символов. Показатель корреляции на основе циклических префиксов может быть выражен следующим образом:

Показатель средней мощности может быть выражен следующим образом:
Для приблизительного обнаружения сигналов следующие тесты могут использоваться некоторым конечным автоматом:
и/или

Для приблизительного обнаружения преамбул следующие тесты могут использоваться некоторым конечным автоматом:
Для приблизительного обнаружения границ символов может использоваться следующий тест максимального правдоподобия:

 и
и  - это коэффициенты для обнаружения сигналов, обнаружения преамбул и приблизительного обнаружения границ символов соответственно.
- это коэффициенты для обнаружения сигналов, обнаружения преамбул и приблизительного обнаружения границ символов соответственно.  и
и  - это коэффициенты для обнаружения сигналов и среднего уровня фонового шума соответственно.
- это коэффициенты для обнаружения сигналов и среднего уровня фонового шума соответственно.
Как указано выше, выполнение 910 приблизительного обнаружения и синхронизации может включать в себя выполнение оценки дробного сдвига несущей частоты (CFO). CORRcp может использоваться для целей оценки дробного CFO. Примером диапазона оценки, который может использоваться, является от -0,5 до +0,5. Оценка дробного CFO, которая определяется, может доставляться 914 в соответствующий компонент(ы) для целей компенсации дробного CFO, если режим 908 отслеживания активирован.
Способ 900 также включает в себя выполнение 916 точного обнаружения и синхронизации. В общих чертах, точное обнаружение и синхронизация может рассматриваться как верификация части или всех результатов приблизительного обнаружения и синхронизации. Как указано выше, точное обнаружение и синхронизация может включать в себя точное обнаружение сигналов, точное обнаружение преамбул и точное обнаружение границ символов.
Одна цель точного обнаружения и синхронизации может состоять в том, чтобы распознавать 918 поступающий вариант требуемого сигнала. Когда это происходит, далее может определяться то, что обнаружение закончено, и может осуществляться 920 переход в режим 908 отслеживания.
Когда точная синхронизация выполняется 916, все варианты, которые определены в качестве результата выполнения 910 приблизительной синхронизации, могут обрабатываться. Поступающие варианты могут обрабатываться на посимвольной основе. Все точное обнаружение и синхронизация может осуществляться в рамках одного символа, чтобы предоставлять возможность обработки в реальном времени.
Точное обнаружение и синхронизация может выполняться независимо от того, известна или неизвестна преамбула 408. Следующее пояснение точного обнаружения и синхронизации может быть применимым во время режима 906 вхождения в синхронизм, во время режима 908 отслеживания или в нормальном режиме работы.
Определенная информация может определяться в качестве части выполнения 916 точного обнаружения и синхронизации. Например, может определяться средняя мощность принимаемого сигнала. Как указано выше, средняя мощность может упоминаться в данном документе как AP. В качестве другого примера, может определяться автокорреляция доставляемого варианта(ов) сигнала преамбулы с использованием сопряженно-симметричного (CS) свойства преамбулы 408. Она может упоминаться в данном документе как CORRcs. AP и CORRcs могут определяться непрерывно для всех доставляемых вариантов.
Далее приводится краткое описание того, как CORRcs может определяться. Вариант сигнала преамбулы и гипотеза синхронизации n0 могут приниматься. FFT может применяться для каждой половины преамбулы 408. Граница символа может указываться посредством гипотезы синхронизации n0. Функция свертки может предоставляться посредством поточечного умножения каждой соответствующей поднесущей 314 в частотной области. IFFT затем может применяться к результату. CORRcs может определяться во временной области или в частотной области.
Как указано выше, выполнение 916 точного обнаружения и синхронизации может включать в себя выполнение точного обнаружения сигналов. Как AP, так и CORRcs могут использоваться в качестве части схемы порогового обнаружения для целей точного обнаружения сигналов. Например, измеренные значения AP и CORRcp могут сравниваться с заранее определенными пороговыми значениями для целей точного обнаружения сигналов.
Как указано выше, выполнение 916 точного обнаружения и синхронизации может включать в себя выполнение точного обнаружения преамбул. Как AP, так и CORRcs могут использоваться в качестве части схемы пикового обнаружения и/или порогового обнаружения для целей точного обнаружения преамбул. Например, измеренные значения AP и CORRcs могут сравниваться с заранее определенными пороговыми значениями для целей точного обнаружения преамбул.
Результат точного обнаружения преамбул может использоваться для целей выполнения точного обнаружения сигналов. Для точного обнаружения границ символов может использоваться пиковое обнаружение. Это может быть выражено следующим образом:

Член  - это позиция точной границы символа. Для точного обнаружения сигналов может использоваться пороговое обнаружение. В частности, могут сравниваться
- это позиция точной границы символа. Для точного обнаружения сигналов может использоваться пороговое обнаружение. В частности, могут сравниваться  и AP. Это может быть выражено следующим образом:
и AP. Это может быть выражено следующим образом:

Член  - это коэффициент для точного обнаружения сигналов. Если точное обнаружение сигналов удовлетворяет критериям, может определяться то, что приблизительное обнаружение сигналов верифицировано, сигнал обнаружен, и что точная граница символа является допустимой и конечной. Способ 900 затем может переходить к следующей стадии (т.е. обработке идентификации последовательностей преамбул). Если точное обнаружение сигналов не удовлетворяет критериям, может определяться то, что приблизительное обнаружение сигналов является неправильным и что сигнал еще не обнаружен. Затем процессы приблизительной синхронизации могут повторно осуществляться.
- это коэффициент для точного обнаружения сигналов. Если точное обнаружение сигналов удовлетворяет критериям, может определяться то, что приблизительное обнаружение сигналов верифицировано, сигнал обнаружен, и что точная граница символа является допустимой и конечной. Способ 900 затем может переходить к следующей стадии (т.е. обработке идентификации последовательностей преамбул). Если точное обнаружение сигналов не удовлетворяет критериям, может определяться то, что приблизительное обнаружение сигналов является неправильным и что сигнал еще не обнаружен. Затем процессы приблизительной синхронизации могут повторно осуществляться.
Как указано выше, выполнение 916 точного обнаружения и синхронизации может включать в себя выполнение точного обнаружения границ символов. Как AP, так и CORRcs могут использоваться в качестве части схемы пикового обнаружения для целей точного обнаружения границ символов. Точная граница символа (синхронизация) может определяться с использованием результата пикового обнаружения и начальной гипотезы синхронизации n0, которая определяется в качестве части приблизительного обнаружения и синхронизации.
Как пояснено выше, оценка дробного CFO может выполняться в качестве части приблизительного обнаружения и синхронизации. Оценка дробного CFO также может выполняться в качестве части точного обнаружения и синхронизации. Как пояснено выше, CORRcp может использоваться для целей оценки дробного CFO, в зависимости от и на основе результатов точного обнаружения сигналов, точного обнаружения символов и точного обнаружения границ символов. Примером диапазона оценки, который может использоваться, является от -0,5 до +0,5.
Далее поясняется точное обнаружение и синхронизация при условии, что преамбула 408 известна. Это может иметь место после того, как вхождение в синхронизм завершено (т.е. после того как переход в режим 908 отслеживания осуществлен) или в нормальном режиме работы. Этот случай может быть применимым для поиска соседних сот.
Если преамбула 408 известна, выполнение 916 точного обнаружения и синхронизации также может включать в себя определение взаимной корреляции преамбулы 408 относительно опорной преамбулы. Это может упоминаться в данном документе как CORRref. CORRref может определяться только один раз в расчете на каждый кадр.
Если преамбула 408 известна, и CORRref определяется, CORRref может использоваться для целей точного обнаружения преамбул и точного обнаружения границ символов. Результаты точного обнаружения преамбул и точного обнаружения границ символов могут быть перечислены в списках вариантов соседних узлов.
Способ 900 также может включать в себя выполнение 922 компенсации дробного сдвига несущей частоты (CFO). Это может осуществляться после перехода в режим 908 отслеживания, т.е. компенсация дробного CFO может не быть доступной в режиме 906 вхождения в синхронизм. Компенсация дробного CFO может применяться для всех поступающих сигналов. Компенсация дробного CFO может быть реализована только в сигнале в полосе модулирующих частот, только в RF-сигнале или как в сигнале в полосе модулирующих частот, так и в RF-сигнале. Компенсация дробного CFO может выполняться во временной области.
Способ 900 также может включать в себя выполнение 924 быстрого преобразования Фурье (FFT) для всех поступающих сигналов, которые обрабатываются в частотной области. Если FFT выполняется перед установлением синхронизации физического уровня, может быть достаточным применять FFT только к варианту сигнала преамбулы. Различные FFT-режимы могут поддерживаться (к примеру, режим 1024, режим 512). Результирующий сигнал (после того, как FFT выполняется 924) может быть сохранен в сигнальном буфере.
Ссылаясь теперь на фиг.9A, способ 900 также может включать в себя выполнение 926 идентификации последовательностей преамбул и оценки целочисленного сдвига несущей частоты (CFO). Двухэтапный подход может использоваться для того, чтобы сокращать время поиска во время идентификации последовательностей преамбул и оценки целочисленного CFO. Первый этап может включать в себя сокращение возможных вариантов целочисленного CFO. Второй этап может включать в себя поиск всех возможных вариантов последовательностей 506 преамбул для сокращенного набора вариантов целочисленного CFO. Все операции поиска для идентификации последовательностей преамбул и оценки целочисленного CFO могут осуществляться в рамках одного кадра, чтобы предоставлять обработку в реальном времени.
В качестве части выполнения 926 идентификации последовательностей преамбул и оценки целочисленного CFO может определяться определенная информация. Например, мощность каждой поднесущей 314 может определяться. Помимо этого, также может определяться взаимная корреляция между принимаемым сигналом и возможными последовательностями 506 преамбул. Это может упоминаться в данном документе как CORRps.
Выполнение 926 идентификации последовательностей преамбул и оценки целочисленного CFO также может включать в себя принятие решения о виртуальном сегменте. Это решение может быть принято с использованием измеренной мощности каждой поднесущей 314. Сумма мощности каждого виртуального сегмента (Pv0, Pv1, Pv2) может вычисляться. Пиковое обнаружение может использоваться для того, чтобы выбирать виртуальный сегмент. Варианты целочисленного CFO могут сокращаться на основе виртуального сегмента. Варианты могут сокращаться, например, на одну треть.
Как указано выше, CORRps может определяться в качестве части выполнения 926 идентификации последовательностей преамбул и оценки целочисленного CFO. Это может осуществляться перед установлением синхронизации физического уровня. В этом случае CORRps может вычисляться для всех возможных последовательностей преамбул (к примеру, 114 последовательностей, где FFT-режим - это 1024). Альтернативно, CORRps может определяться после установления синхронизации физического уровня или во время процесса поиска сот.
CORRps может определяться для всех вариантов целочисленного CFO в рамках сокращенного набора вариантов целочисленного CFO. Это может осуществляться перед или после установления синхронизации физического уровня. Может быть Zi/3 вариантов целочисленного CFO в расчете на последовательность 506 преамбул, где Zi - это максимальное допустимое значение целочисленного CFO.
Выполнение 926 идентификации последовательностей преамбул и оценки целочисленного CFO может осуществляться с помощью пикового обнаружения для всех результатов CORRps. PAindex 516 и идентификатор 512 соты могут определяться. Помимо этого сегмент 510 может определяться. Помимо этого целочисленный CFO может определяться.
Способ 900 также может включать в себя выполнение 928 оценки и компенсации общего CFO. Оценка общего CFO может включать в себя как оценку дробного CFO, так и оценку целочисленного CFO. Компенсация общего CFO может выполняться на основе оцененного общего CFO. Компенсация общего CFO может быть реализована только в сигнале в полосе модулирующих частот, только в RF-сигнале или как в сигнале в полосе модулирующих частот, так и в RF-сигнале. Компенсация общего CFO может выполняться во временной области.
Способ 900 также может включать в себя выполнение 930 оценки и компенсации сдвига частоты дискретизации (SFO). SFO может извлекаться из оцененного CFO. В качестве примера, в WiMAX для мобильных устройств схема синхронизации с захватом может использоваться для оценки SFO. Компенсация SFO может выполняться с использованием оцененного SFO. Компенсация SFO может быть реализована только в сигнале в полосе модулирующих частот, только в RF-сигнале или как в сигнале в полосе модулирующих частот, так и в RF-сигнале. Компенсация SFO может выполняться во временной области.
Способ 900 также может включать в себя установление 932 синхронизации физического уровня. Это может включать в себя определение того, являются все гипотезы корректными или нет. Может быть осуществлена попытка принимать сообщения нисходящей линии связи, в том числе FCH/DLFP, сообщения MAP, сообщения обнаружения характеристик устройств (DCD), сообщения равномерного распределения вызовов (UCD) и т.д. Может определяться 934 то, что синхронизация физического уровня установлена, являются или нет принимаемые сообщения аналогичными сообщениям нисходящей линии связи посредством проверки контролем циклическим избыточным кодом (CRC) или правил сообщений нисходящей линии 108 связи.
Если после получения сведений по сообщениям нисходящей линии связи (что может осуществляться для нескольких кадров многократно) определяется 934, т.е. то, что синхронизация физического уровня не установлена, то способ 900 может включать в себя возвращение в режим 906 вхождения в синхронизм и повторение всего процесса синхронизации. В частности, беспроводное устройство может быть установлено в режим 906 вхождения в синхронизм, параметры могут задаваться 902 для режима 906 вхождения в синхронизм, и способ 900 может продолжаться способом, описанным выше.
Если после получения сведений по сообщениям нисходящей линии связи определяется 934 то, что синхронизация физического уровня установлена (к примеру, если сообщения нисходящей линии связи принимаются успешно), то способ 900 может включать в себя переход 936 в нормальный режим работы. В частности, беспроводное устройство может быть установлено в режим синхронизации физического уровня, и параметры могут задаваться для синхронизации физического уровня.
Нормальный режим 936 работы может включать в себя непрерывную оценку и компенсацию CFO/SFO. Нормальный режим 936 работы также может включать в себя выполнение частотной коррекции и оценки канала от преамбулы 408 до конца субкадра нисходящей линии связи.
Нормальный режим 936 работы также может включать в себя FCH/DLFP-обработку. Это может включать в себя оценку битовой карты подканалов перед декодированием FCH/DLFP. Это также может включать в себя извлечение коэффициента зонального усиления и доступных пилотных сигналов из оцененной битовой карты подканалов. FCH/DLFP может быть декодирован, и битовая карта подканалов может извлекаться из декодированного DLFP. Коэффициент зонального усиления и доступные пилотные сигналы могут извлекаться из битовой карты подканалов. Нормальный режим работы также может включать в себя обработку преобразования в нисходящей линии 108 связи/восходящей линии 110 связи, обработку пакетов, обнаружение всех необходимых параметров нисходящей линии связи от базовой станции 104, переход к процессу выбора диапазона и т.д.
Приблизительное и точное обнаружение и синхронизация могут выполняться последовательно. Другими словами, сначала может выполняться приблизительное обнаружение и синхронизация, а затем может выполняться точное обнаружение и синхронизация, когда результаты приблизительного обнаружения и синхронизации являются доступными.
Альтернативно, приблизительное и точное обнаружение и синхронизация могут выполняться одновременно. Другими словами, приблизительное обнаружение и синхронизация и точное обнаружение и синхронизация могут начинаться приблизительно в одно время. Первоначально, точное обнаружение и синхронизация могут выполняться без результатов из приблизительного обнаружения и синхронизации. Когда результаты из приблизительного обнаружения и синхронизации являются доступными, эти результаты могут использоваться для целей точного обнаружения и синхронизации.
Способ 900 по фиг.9 и 9A, описанный выше, может выполняться посредством различного аппаратного и/или программного компонента(ов) и/или модуля(ей), соответствующего блокам 1000 "средство плюс функция", проиллюстрированным на фиг.10 и 10A. Другими словами, блоки 902-936, проиллюстрированные на фиг.9 и 9A, соответствуют блокам 1002-1036 "средство плюс функция", проиллюстрированным на фиг.10 и 10A.
Фиг.11 иллюстрирует пример архитектуры 1100 синхронизации и обнаружения для беспроводного устройства (к примеру, пользовательского терминала 106), которое может быть частью системы 100 беспроводной связи, которая использует OFDM/OFDMA. Архитектура 1100 синхронизации и обнаружения может использоваться для того, чтобы осуществлять способы 800, 900, показанные на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения включает в себя компонент 1106, который выполняет приблизительное обнаружение сигналов. Этот компонент 1106 может упоминаться как компонент 1106 приблизительного обнаружения сигналов. Приблизительное обнаружение сигналов может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компоненты 1108a, 1108b, которые выполняют приблизительное обнаружение преамбул. Эти компоненты 1108a, 1108b могут упоминаться совместно как компонент 1108 приблизительного обнаружения преамбул. Приблизительное обнаружение преамбул может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1110, который выполняет приблизительное обнаружение границ символов. Этот компонент 1110 может упоминаться как компонент 1110 приблизительного обнаружения границ символов. Приблизительное обнаружение границ символов может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1112, который выполняет оценку дробного CFO. Этот компонент 1112 может упоминаться как компонент 1112 оценки дробного CFO. Оценка дробного CFO может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1106 приблизительного обнаружения сигналов, компонент 1108 приблизительного обнаружения преамбул, компонент 1110 приблизительного обнаружения границ символов и компонент 1112 оценки дробного CFO могут упоминаться совместно как компонент 1102 приблизительного обнаружения и синхронизации. Приблизительное обнаружение и синхронизация может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1128, который определяет CORRcp (т.е. автокорреляцию принимаемого сигнала 1104 с использованием свойства циклического префикса (CP) преамбулы 408, как описано выше). Этот компонент 1128 может упоминаться в данном документе как компонент 1128 автокорреляции на основе циклических префиксов. CORRcp может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1144, который определяет AP (т.е. среднюю мощность принимаемого сигнала 1104, как описано выше). Этот компонент 1144 может упоминаться в данном документе как компонент 1144 определения средней мощности. AP может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1118, который выполняет точное обнаружение сигналов. Этот компонент 1118 может упоминаться в данном документе как компонент 1118 точного обнаружения сигналов. Точное обнаружение сигналов может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1120, который выполняет точное обнаружение преамбул. Этот компонент 1120 может упоминаться в данном документе как компонент 1120 точного обнаружения преамбул. Точное обнаружение преамбул может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1122, который выполняет точное обнаружение границ символов. Этот компонент 1122 может упоминаться в данном документе как компонент 1122 точного обнаружения границ символов. Точное обнаружение границ символов может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1118 точного обнаружения сигналов, компонент 1120 точного обнаружения преамбул и компонент 1122 точного обнаружения границ символов могут упоминаться совместно как компонент 1114 точного обнаружения и синхронизации. Точное обнаружение и синхронизация могут выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Как указано выше, результаты 1116 приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Например, когда поступающий сигнал распознан в качестве варианта, затем вариант может доставляться в компонент 1114 точного обнаружения и синхронизации со связанной информацией, такой как сдвиг синхронизации и частоты. Таким образом, результаты 1116 приблизительного обнаружения и синхронизации, которые используются для точного обнаружения и синхронизации, могут включать в себя одни или более вариантов сигналов и связанную информацию, к примеру, информацию синхронизации и информацию сдвига частоты, соответствующую варианту(ам) сигнала.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1124, который определяет CORRcs (т.е. автокорреляцию доставляемого варианта(ов) сигнала преамбулы с использованием сопряженно-симметричного (CS) свойства преамбулы 408, как описано выше). Этот компонент 1124 может упоминаться в данном документе как компонент 1124 сопряженно-симметричной автокорреляции. CORRcs может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Как указано выше, CORRcs может определяться во временной области или в частотной области. Фиг.11 показывает CORRcs, определяемый в частотной области.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1126, который определяет CORRref (т.е. взаимную корреляцию преамбулы 408 относительно опорной преамбулы, как описано выше). Этот компонент 1126 может упоминаться в данном документе как компонент 1126 опорной взаимной корреляции. CORRref может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя различные компоненты, которые могут быть использованы, когда вхождение в синхронизм с принимаемым сигналом 1104 достигнуто (т.е. когда переход в режим 908 отслеживания осуществлен). Совместно, эти компоненты могут упоминаться как компонент 1130 обработки режима отслеживания.
Компонент 1130 обработки режима отслеживания включает в себя компонент 1146, который выполняет быстрое преобразование Фурье (FFT). Этот компонент 1146 может упоминаться как FFT-компонент 1146.
Компонент 1130 обработки режима отслеживания также включает в себя сигнальный буфер 1148. Сигнальный буфер 1148 может использоваться для того, чтобы сохранять вывод FFT-компонента 1146.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1150, который определяет мощность каждой поднесущей 314. Этот компонент 1150 может упоминаться как компонент 1150 вычисления мощности поднесущих.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1152, который определяет виртуальный сегмент для целей идентификации сокращенного набора вариантов целочисленного CFO. Этот компонент 1152 может упоминаться как компонент 1152 определения виртуальных сегментов. Виртуальный сегмент может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1154, который идентифицирует сокращенный набор вариантов целочисленного CFO на основе виртуального сегмента, который идентифицируется. Этот компонент 1154 может упоминаться как компонент 1154 сокращения числа вариантов. Сокращенный набор вариантов целочисленного CFO может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1156, который определяет CORRps (т.е. взаимную корреляцию между принимаемым сигналом 1104 и возможными последовательностями 506 преамбул, как пояснено выше). Этот компонент 1156 может упоминаться как компонент 1156 взаимной корреляции последовательностей преамбул. CORRps может определяться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1132, который выполняет идентификацию последовательностей преамбул, т.е. который идентифицирует последовательность 506 преамбул в рамках сигнала 1104, который принимается от базовой станции 104. Этот компонент 1132 может упоминаться в данном документе как компонент 1132 идентификации последовательностей преамбул. Идентификация последовательностей преамбул может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1134, который выполняет оценку сегментов, т.е. который определяет сегмент, которому передающая базовая станция 104 соответствует. Этот компонент 1134 может упоминаться в данном документе как компонент 1134 оценки сегментов. Оценка сегментов может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1136, который выполняет оценку целочисленного CFO, т.е. который определяет целочисленный CFO принимаемого сигнала 1104. Этот компонент 1136 может упоминаться в данном документе как компонент 1136 оценки целочисленного CFO. Оценка целочисленного CFO может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1138, который выполняет оценку общего CFO, т.е. который определяет общий CFO (как целочисленный, так и дробный CFO) принимаемого сигнала 1104. Этот компонент 1138 может упоминаться в данном документе как компонент 1138 оценки общего CFO. Оценка общего CFO может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1140, который выполняет оценку сдвига частоты дискретизации (SFO). Этот компонент 1140 может упоминаться как компонент 1140 оценки SFO. Оценка SFO
может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Компонент 1130 обработки режима отслеживания также включает в себя компонент 1142, который выполняет синхронизацию физического уровня (PHY). Этот компонент 1142 может упоминаться как компонент 1142 синхронизации физического уровня. Синхронизация физического уровня может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Архитектура 1100 синхронизации и обнаружения также включает в себя компонент 1178, который выполняет компенсацию CFO/SFO. Этот компонент 1178 может упоминаться как компонент 1178 компенсации CFO/SFO. Компенсация CFO/SFO
может выполняться способом, описанным выше относительно способов 800, 900, показанных на фиг.8 и 9-9A.
Возможность поиска соседних сот может предоставляться в нормальном режиме 936 работы. Возможность поиска соседних сот далее кратко поясняется.
В нормальном режиме работы после установления всей требуемой синхронизации для обслуживающей соты информация соседней соты (особенно касательно последовательностей преамбул для целей синхронизации или целей поиска сот) может быть известна или неизвестна от обслуживающей базовой станции 104. Один из двух подходов может использоваться для поиска соседних сот. Один подход заключается в том, чтобы использовать CORRref (взаимную корреляцию с использованием конфигурации опорной преамбулы) с помощью обработки во временной области, а другой заключается в том, чтобы использовать CORRcs (сопряженно-симметричную корреляцию) и идентификацию последовательностей преамбул с помощью обработки в частотно-временной области.
Первая схема (на основе CORRref) может использоваться, когда пользовательский терминал 106 знает информацию соседней соты, тем самым пользовательский терминал 106 знает последовательности преамбул соседней соты, которые используются в соответствующих базовых станциях 104. На основе известных последовательностей преамбул пользовательский терминал 106 может искать синхронизацию соседней соты (границу символа) с использованием коррелятора CORRref.
Вторая схема может использоваться независимо от того, знает пользовательский терминал 106 информацию соседней соты или нет. Если информация соседней соты является недоступной, пользовательский терминал 106 может искать соседнюю соту с использованием схемы, аналогичной используемой при начальной синхронизации, описанной выше; тем не менее, затраты на поиск могут сокращаться за счет использования уже известной информации (т.е. приблизительная синхронизация может опускаться, поскольку можно предположить, что соседняя сота должна использовать синхронизацию, практически идентичную синхронизации, используемой обслуживающей базовой станцией 104). Можно предположить, что целочисленный сдвиг частоты отсутствует, поскольку все базовые станции 104 могут использовать генератор, как задано в описании стандарта, и после синхронизации с обслуживающей сотой этот целочисленный сдвиг частоты вероятно должен равняться нулю. Таким образом, идентификация последовательностей преамбул может осуществляться с помощью сокращенного числа вариантов, соответствующих отсутствию целочисленного сдвига частоты. Помимо этого, вычисление мощности и обнаружение виртуальных сегментов может опускаться по аналогичной причине. Позиция границы символов обслуживающей соты может исключаться из процесса обнаружения границ символов соседней соты.
Если информация соседней соты является доступной, процессы поиска и синхронизации для соседних сот могут упрощаться посредством использования известной информации. Например, приблизительная синхронизация может опускаться. Кроме того, можно предположить, что имеется нулевой целочисленный сдвиг частоты. Идентификация последовательностей преамбул может осуществляться с помощью только одной известной последовательности преамбул для каждой соответствующей базовой станции 104.
Архитектура 1100 синхронизации и обнаружения также включает в себя радиочастотный (RF) входной каскад 1170, аналого-цифровой преобразователь (ADC) 1172, сигнальный буфер 1174 и модуль 1176 автоматической регулировки усиления. Вывод ADC 1172 и вывод компонента 1178 компенсации CFO/SFO предоставляются в мультиплексор 1180, который мультиплексирует эти выводы в компонент 1144 определения средней мощности, компонент 1128 автокорреляции на основе циклических префиксов, компонент 1124 сопряженно-симметричной автокорреляции и компонент 1126 опорной взаимной корреляции.
Способы синхронизации и обнаружения, описанные в данном документе, могут предоставлять быстрое обнаружение сигналов, быстрое обнаружение преамбул, быстрый поиск последовательности 506 преамбул и сегментов 510 и быструю оценку целочисленного CFO. Например, с помощью способов синхронизации и обнаружения, описанных в данном документе, может быть возможным достигать обнаружения границ символов в рамках двух символов (один для приблизительного обнаружения границ символов и один для точного обнаружения границ символов). Аналогично, с помощью способов синхронизации и обнаружения, описанных в данном документе, может быть возможным обнаруживать последовательность преамбул в рамках одного кадра. Это дает возможность возможности обработки в реальном времени.
Эти результаты могут достигаться с относительно низкой сложностью. Например, как пояснено выше, CORRcs (т.е. автокорреляция доставляемого варианта(ов) сигнала преамбулы с использованием сопряженно-симметричного (CS) свойства преамбулы 408) может использоваться для целей обнаружения сигналов и/или преамбул. Операции автокорреляции на основе CS-свойства преамбулы 408 могут быть менее сложными, чем другие типы операций автокорреляции, которые могут использоваться для обнаружения сигналов и/или преамбул. В качестве другого примера, идентификация последовательностей преамбул может выполняться относительно сокращенного набора вариантов целочисленного CFO. Это также может способствовать меньшей сложности способов и устройств, описанных в данном документе.
Способы и устройства, описанные в данном документе, могут предоставлять возможность обработки в реальном времени за счет сокращения сложности вычисления. Например, обработка может осуществляться в пределах одного символа для приблизительной синхронизации и точной синхронизации соответственно. Обработка может осуществляться в пределах одного кадра для идентификации последовательностей преамбул и оценки целочисленного сдвига несущей частоты.
IEEE C802.16e-04/327r1 описывает несколько схем синхронизации и обнаружения, в том числе и схему, которая может упоминаться как схема поиска "методом прямого опробования". Далее выполняется сравнение между способом 900, показанным на фиг.9 и 9A, и схемой поиска методом прямого опробования, описанной в IEEE C802.16e-04/327r1. Информация, касающаяся сложности схемы поиска методом прямого опробования, может быть найдена в IEEE C802.16e-04/327r1.
Таблица 1 включает в себя определенную информацию, которая сравнивает способ 900, показанный на фиг.9 и 9A, со схемой поиска методом прямого опробования, которая описана в IEEE C802.16e-04/327r1. Предполагается, что NSEQ=284, NFFT=1024, M=42, NCP=128 и NINT=24. Число требуемых вычислений имеет длительность в один кадр. "Наихудший случай" упоминается как случай, когда имеется ложное обнаружение на стадии приблизительной синхронизации. За исключением "наихудшего случая" предполагается, что ложные обнаружения отсутствуют.
Сравнение способа, показанного на фиг.9 и 9A,
со схемой поиска методом прямого опробования,
которая описана в IEEE C802.16e-04/327r1
85 FFT в наихудшем случае
(Это число умножений требуется в расчете на каждое FFT)
286030 в наихудшем случае
Фиг.12 иллюстрирует различные компоненты, которые могут быть использованы в беспроводном устройстве 1202. Беспроводное устройство 1202 является примером устройства, которое может быть выполнено с возможностью реализовывать различные способы, описанные в данном документе. Беспроводное устройство 1202 может быть базовой станцией 104 или пользовательским терминалом 106.
Беспроводное устройство 1202 может включать в себя процессор 1204, который управляет работой беспроводного устройства 1202. Процессор 1204 также может упоминаться как центральный процессор (CPU). Запоминающее устройство 1206, которое может включать в себя постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), предоставляет инструкции и данные в процессор 1204. Часть запоминающего устройства 1206 также может включать в себя энергонезависимое оперативное запоминающее устройство (NVRAM). Процессор 1204 типично выполняет логические и арифметические операции на основе программных инструкций, сохраненных в рамках запоминающего устройства 1206. Инструкции в запоминающем устройстве 1206 могут быть выполняться, чтобы осуществлять способы, описанные в данном документе.
Беспроводное устройство 1202 также может включать в себя корпус 1208, который может включать в себя передающее устройство 1210 и приемное устройство 1212, чтобы давать возможность передачи и приема данных между беспроводным устройством 1202 и удаленным местоположением. Передающее устройство 1210 и приемное устройство 1212 могут быть комбинированы в приемопередающее устройство 1214. Антенна 1216 может быть присоединена к корпусу 1208 и электрически соединена с приемопередающим устройством 1214. Беспроводное устройство 1202 также может включать в себя (не показаны) несколько передающих устройств, несколько приемных устройств, несколько приемопередающих устройств и/или несколько антенн.
Беспроводное устройство 1202 также может включать в себя детектор 1218 сигналов, который может использоваться для того, чтобы обнаруживать и определять количество уровня сигналов, принимаемых приемопередающим устройством 1214. Детектор 1218 сигналов может обнаруживать такие сигналы, как полная энергия, энергия пилотных сигналов в расчете на символ псевдошумовой (PN) последовательности, спектральная плотность мощности и другие сигналы. Беспроводное устройство 1202 также может включать в себя процессор 1220 цифровых сигналов (DSP) для использования в обработке сигналов.
Различные компоненты беспроводного устройства 1202 могут быть соединены между собой посредством системы 1222 шин, которая может включать в себя шину питания, шину управляющих сигналов и шину сигналов состояния в дополнение к шине данных. Тем не менее, для понятности, различные шины иллюстрируются на фиг.12 как система 1222 шин.
При использовании в данном документе, термин "определение" охватывает широкий спектр действий. Например, "определение" может включать в себя расчет, вычисление, обработку, извлечение, получение сведений, поиск (к примеру, поиск в таблице, базе данных или другой структуре данных), обнаружение и т.п. Также, "определение" может включать в себя прием (к примеру, прием информации), осуществление доступа (к примеру, осуществление доступа к данным в запоминающем устройстве) и т.п. Также, "определение" может включать в себя разрешение, отбор, выбор, установление и т.п.
Информация и сигналы могут быть представлены с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы и т.п., которые могут упоминаться по всему описанию выше, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с настоящим раскрытием сущности, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте процессором может быть любой доступный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как комбинация вычислительных устройств, к примеру, комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая аналогичная конфигурация.
Этапы способа или алгоритма, описанные в связи с настоящим раскрытием сущности, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение посредством процессора, либо в комбинации вышеозначенного. Программный модуль может постоянно размещаться в любой форме носителя хранения данных, который известен в данной области техники. Некоторые примеры носителей хранения данных, которые могут использоваться, включают в себя запоминающее устройство типа RAM, флэш-память, запоминающее устройство типа ROM, запоминающее устройство типа EPROM, запоминающее устройство типа EEPROM, регистры, жесткий диск, съемный диск, CD-ROM и т.д. Программный модуль может содержать одну инструкцию или множество инструкций и может быть распределен по нескольким различным сегментам кода, по различным программам и по нескольким носителям хранения данных. Носитель хранения данных может быть соединен с процессором так, что процессор может считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте, носитель хранения данных может быть встроен в процессор.
Способы, раскрытые в данном документе, содержат один ил более этапов или действий для осуществления описанного способа. Этапы и/или действия способа могут меняться друг с другом без отступления от объема формулы изобретения. Другими словами, если конкретный порядок этапов или действий не указывается, порядок и/или использование конкретных этапов и/или действий может модифицироваться без отступления от объема формулы изобретения.
Описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммном обеспечении или в любой комбинации вышеозначенного. Если реализованы в программном обеспечении, функции могут сохраняться как одна или более инструкций на машиночитаемом носителе. Носителями хранения могут быть любые доступные носители, к которым можно осуществлять доступ посредством компьютера. В качестве примера, но не ограничения, эти машиночитаемые носители могут содержать RAM, ROM, EEPROM, CD-ROM или другое устройство хранения на оптических дисках, устройство хранения на магнитных дисках или другие магнитные устройства хранения, либо любой другой носитель, который может быть использован для того, чтобы переносить или сохранять требуемый программный код в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера. Диск (disk) и диск (disc) при использовании в данном документе включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск Blu-Ray®, при этом диски (disk) обычно воспроизводят данные магнитно, тогда как диски (disc) обычно воспроизводят данные оптически с помощью лазеров.
Программное обеспечение или инструкции также могут передаваться по среде передачи. Например, если программное обеспечение передается из веб-узла, сервера или другого удаленного источника с помощью коаксиального кабеля, оптоволоконного кабеля, "витой пары", цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радиопередающие и микроволновые среды, то коаксиальный кабель, оптоволоконный кабель, "витая пара", DSL или беспроводные технологии, такие как инфракрасные, радиопередающие и микроволновые среды, включены в определение среды передачи.
Дополнительно, следует принимать во внимание, что модули и/или другие соответствующие средства для выполнения способов и технологий, описанных в данном документе, таких как проиллюстрированные на фиг.9-10, могут быть загружены и/или иначе получены посредством мобильного устройства и/или базовой станции при соответствующих условиях. Например, такое устройство может быть соединено с сервером, чтобы упрощать передачу средства для осуществления способов, описанных в данном документе. Альтернативно, различные способы, описанные в данном документе, могут предоставляться через средство хранения (к примеру, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), физический носитель хранения данных, такой как компакт-диск (CD) или гибкий диск и т.д.), так что мобильное устройство и/или базовая станция может получать различные способы при подключении или предоставлении средства хранения для устройства. Кроме того, любая другая подходящая технология для предоставления способов и технологий, описанных в данном документе, для устройства может быть использована.
Следует понимать, что формула изобретения не ограничена точной конфигурацией и компонентами, проиллюстрированными выше. Различные модификации, изменения и варьирования могут осуществляться в компоновке, работе и подробностях способов и устройств, описанных выше, без отступления от объема формулы изобретения.

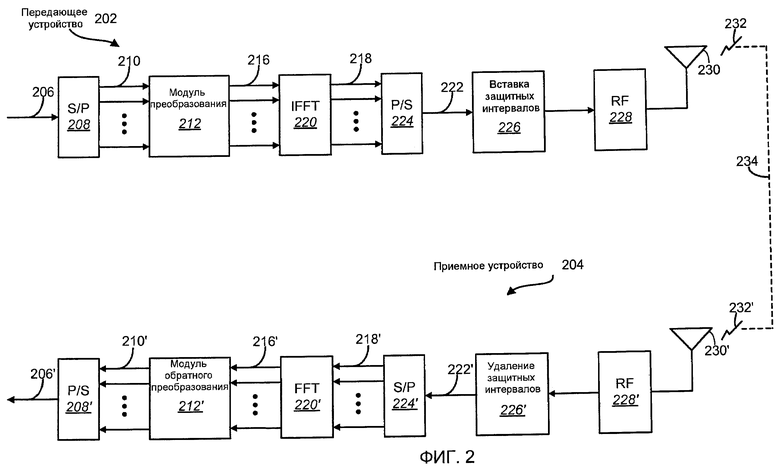

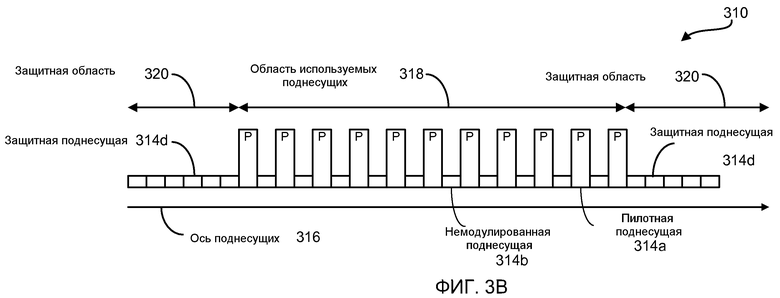
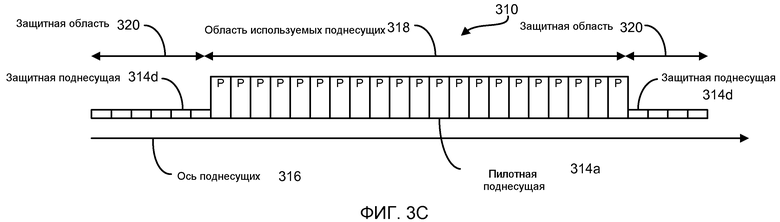
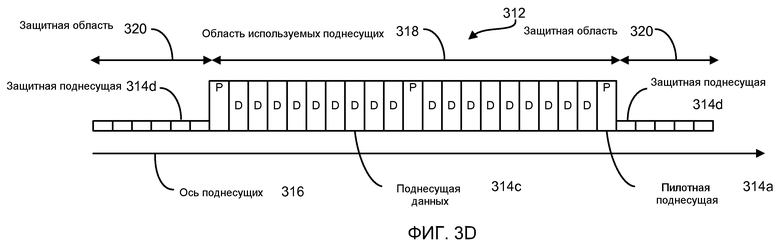




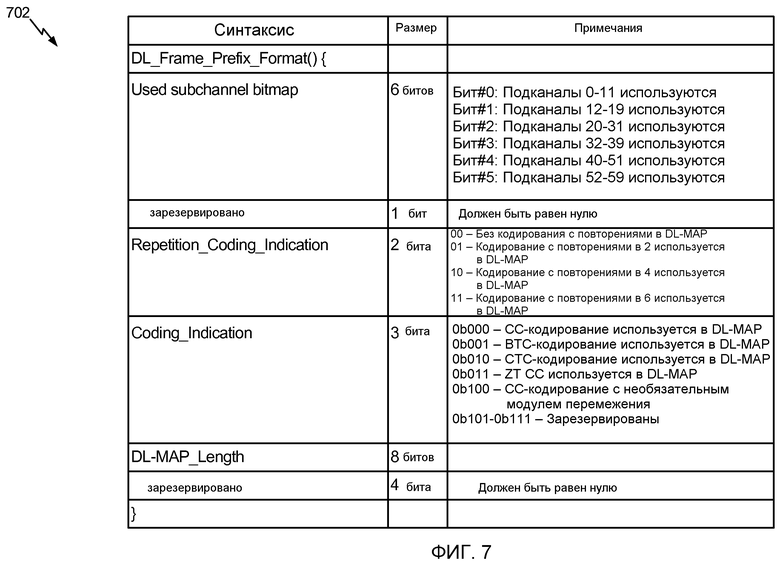
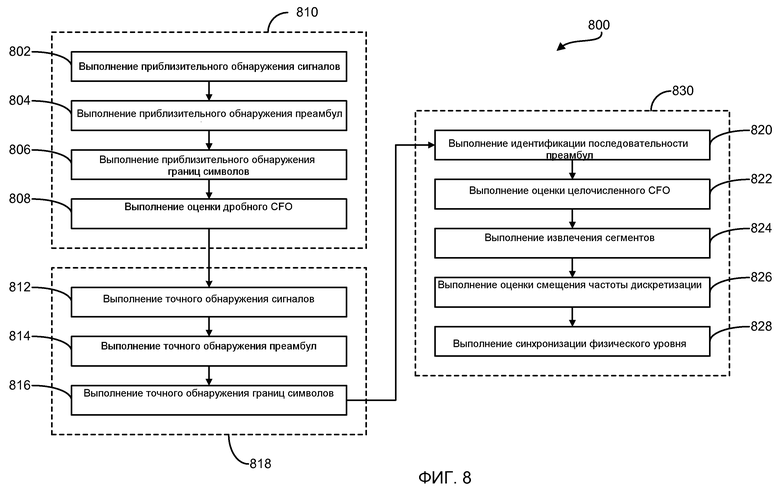

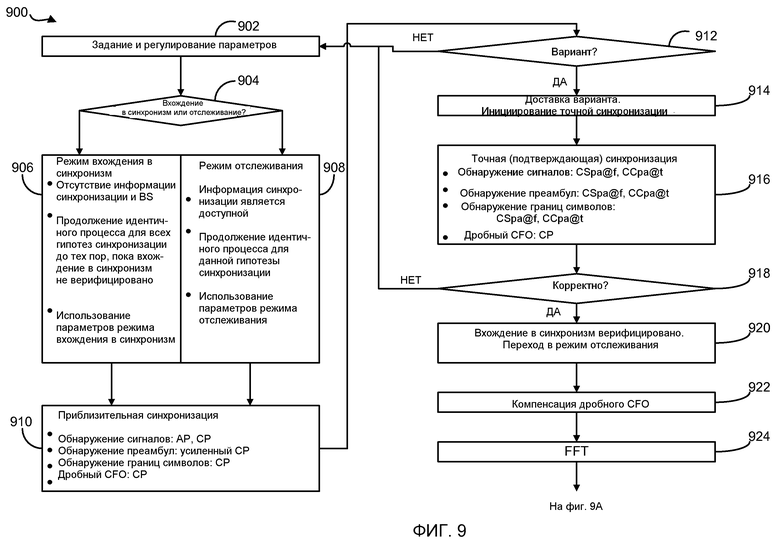

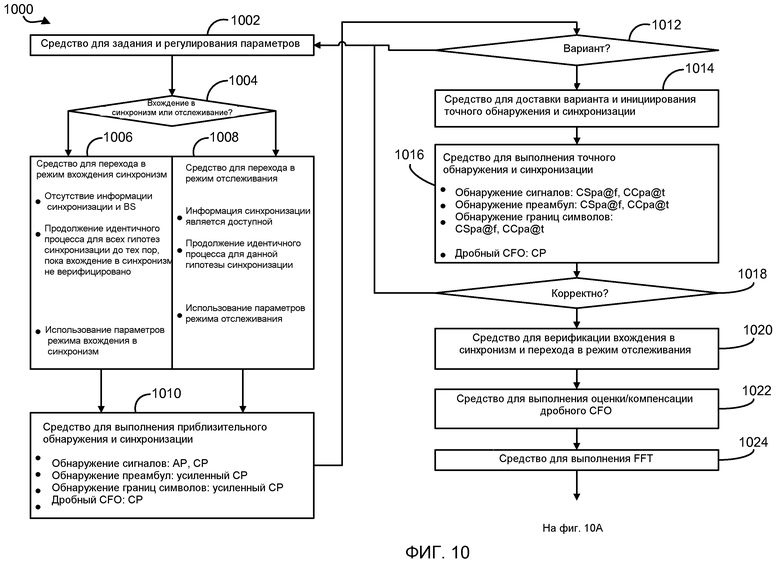
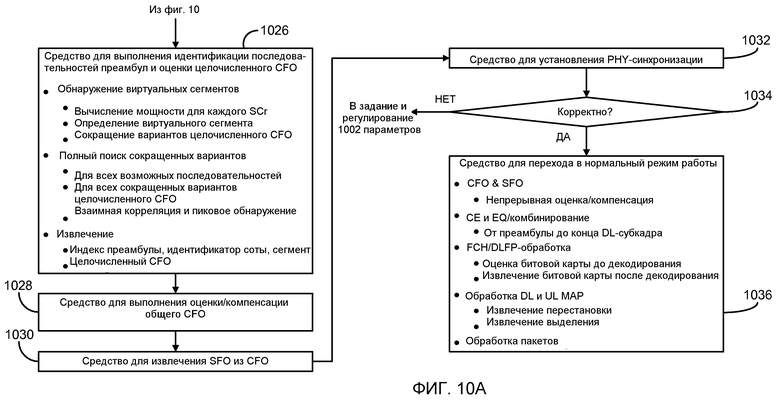

Изобретение относится к беспроводной связи и предназначено для синхронизации и обнаружения в системах беспроводной связи. Технический результат - повышение точности синхронизации и обнаружения принимаемого сигнала. Для этого в способе выполняется сначала приблизительное обнаружение и синхронизация относительно принимаемого сигнала, а затем выполняются точное обнаружение и синхронизация для вхождения в синхронизм с принимаемым сигналом. Результаты приблизительного обнаружения и синхронизации могут использоваться для точного обнаружения и синхронизации. Способ синхронизации и обнаружения также может выполнять обработку режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто. 4 н. и 46 з.п. ф-лы, 19 ил., 1 табл.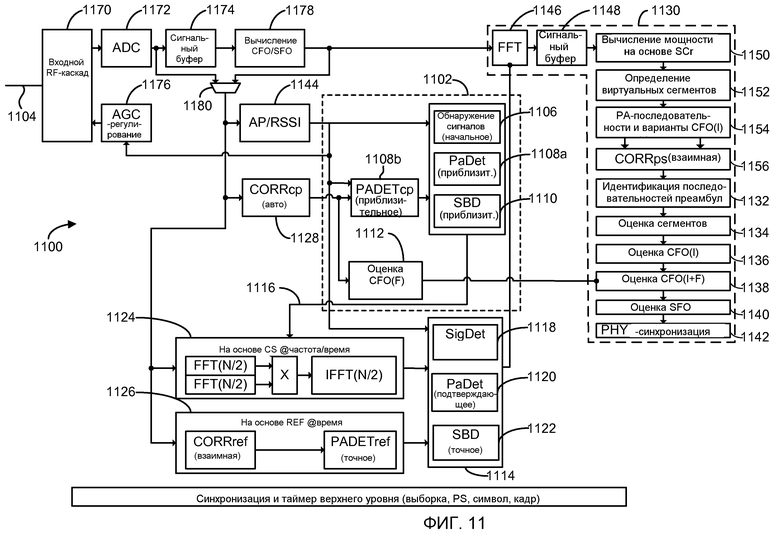
1. Способ синхронизации и обнаружения в беспроводном устройстве, содержащий этапы, на которых:
выполняют грубое обнаружение и синхронизацию относительно принимаемого сигнала;
выполняют точное обнаружение и синхронизацию для вхождения в синхронизм с принимаемым сигналом, при этом результаты грубого обнаружения и синхронизации используют для точного обнаружения и синхронизации; и
выполняют обработку режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто,
причем выполнение грубого обнаружения и синхронизации содержит этапы, на которых:
выполняют грубое обнаружение сигналов;
выполняют грубое обнаружение преамбул;
выполняют грубое обнаружение границ символов и
выполняют оценку дробного сдвига несущей частоты.
2. Способ по п.1, в котором выполнение точного обнаружения и синхронизации содержит этапы, на которых:
выполняют точное обнаружение сигналов;
выполняют точное обнаружение преамбул и
выполняют точное обнаружение границ символов.
3. Способ по п.1, в котором выполнение обработки режима отслеживания содержит этапы, на которых:
выполняют идентификацию последовательностей преамбул;
выполняют оценку целочисленного сдвига несущей частоты;
выполняют оценку сегментов;
выполняют оценку сдвига частоты дискретизации и
выполняют синхронизацию физического уровня.
4. Способ по п.1, в котором выполнение грубого обнаружения и синхронизации содержит этап, на котором определяют автокорреляцию принимаемого сигнала с использованием свойства циклического префикса преамбулы.
5. Способ по п.1, в котором выполнение точного обнаружения и синхронизации содержит этап, на котором определяют автокорреляцию, по меньшей мере, одного варианта сигнала преамбулы с использованием сопряженно-симметричного свойства преамбулы.
6. Способ по п.1, в котором выполнение точного обнаружения и синхронизации содержит этап, на котором определяют взаимную корреляцию преамбулы относительно опорной преамбулы.
7. Способ по п.1, в котором выполнение обработки режима отслеживания содержит этап, на котором определяют взаимную корреляцию между принимаемым сигналом и возможными последовательностями преамбул.
8. Способ по п.1, в котором грубое обнаружение и синхронизацию и точное обнаружение и синхронизацию выполняют последовательно.
9. Способ по п.1, в котором грубое обнаружение и синхронизацию и точное обнаружение и синхронизацию выполняют одновременно.
10. Способ по п.1, в котором беспроводное устройство выполнено с возможностью использования в рамках системы беспроводной связи, которая использует мультиплексирование с ортогональным частотным разделением каналов.
11. Способ по п.1, в котором беспроводное устройство является пользовательским терминалом.
12. Беспроводное устройство, которое выполняет синхронизацию и обнаружение относительно принимаемого сигнала, содержащее:
компонент грубого обнаружения и синхронизации, который выполняет грубое обнаружение и синхронизацию относительно принимаемого сигнала;
компонент точного обнаружения и синхронизации, который выполняет точное обнаружение и синхронизацию для вхождения в синхронизм с принимаемым сигналом, при этом результаты грубого обнаружения и синхронизации используются для точного обнаружения и синхронизации; и
компонент обработки режима отслеживания, который выполняет обработку режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто,
причем компонент грубого обнаружения и синхронизации содержит:
компонент грубого обнаружения сигналов, который выполняет грубое обнаружение сигналов;
компонент грубого обнаружения преамбул, который выполняет грубое обнаружение преамбул
компонент грубого обнаружения границ символов, который выполняет грубое обнаружение границ символов; и
компонент оценки дробного сдвига несущей частоты, который выполняет оценку дробного сдвига несущей частоты.
13. Беспроводное устройство по п.12, в котором компонент точного обнаружения и синхронизации содержит:
компонент точного обнаружения сигналов, который выполняет точное обнаружение сигналов;
компонент точного обнаружения преамбул, который выполняет точное обнаружение преамбул; и
компонент точного обнаружения границ символов, который выполняет точное обнаружение границ символов.
14. Беспроводное устройство по п.12, в котором компонент обработки режима отслеживания содержит:
компонент идентификации последовательностей преамбул, который выполняет идентификацию последовательностей преамбул;
компонент оценки целочисленного сдвига несущей частоты, который выполняет оценку целочисленного сдвига несущей частоты;
компонент оценки сегментов, который выполняет оценку сегментов;
компонент оценки сдвига частоты дискретизации, который выполняет оценку сдвига частоты дискретизации; и
компонент синхронизации физического уровня, который выполняет синхронизацию физического уровня.
15. Беспроводное устройство по п.12, в котором компонент грубого обнаружения и синхронизации содержит компонент автокорреляции на основе циклических префиксов, который определяет автокорреляцию принимаемого сигнала с использованием свойства циклического префикса преамбулы.
16. Беспроводное устройство по п.12, в котором компонент точного обнаружения и синхронизации содержит компонент сопряженно-симметричной автокорреляции, который определяет автокорреляцию, по меньшей мере, одного варианта сигнала преамбулы с использованием сопряженно-симметричного свойства преамбулы.
17. Беспроводное устройство по п.12, в котором компонент точного обнаружения и синхронизации содержит компонент опорной взаимной корреляции, который определяет взаимную корреляцию преамбулы относительно опорной преамбулы.
18. Беспроводное устройство по п.12, в котором компонент обработки режима отслеживания содержит компонент взаимной корреляции последовательностей преамбул, который определяет взаимную корреляцию между принимаемым сигналом и возможными последовательностями преамбул.
19. Беспроводное устройство по п.12, в котором грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются последовательно.
20. Беспроводное устройство по п.12, в котором грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются одновременно.
21. Беспроводное устройство по п.12, при этом беспроводное устройство выполнено с возможностью использования в системе беспроводной связи, которая использует мультиплексирование с ортогональным частотным разделением каналов.
22. Беспроводное устройство по п.12, при этом беспроводное устройство является пользовательским терминалом.
23. Устройство, которое выполняет синхронизацию и обнаружение относительно принимаемого сигнала, содержащее:
средство для выполнения грубого обнаружения и синхронизации относительно принимаемого сигнала;
средство для выполнения точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом, при этом результаты грубого обнаружения и синхронизации используются для точного обнаружения и синхронизации; и
средство для выполнения обработки режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто,
причем средство для выполнения грубого обнаружения и синхронизации содержит:
средство для выполнения грубого обнаружения сигналов;
средство для выполнения грубого обнаружения преамбул;
средство для выполнения грубого обнаружения границ символов и
средство для выполнения оценки дробного сдвига несущей частоты.
24. Устройство по п.23, в котором средство для выполнения точного обнаружения и синхронизации содержит:
средство для выполнения точного обнаружения сигналов;
средство для выполнения точного обнаружения преамбул и
средство для выполнения точного обнаружения границ символов.
25. Устройство по п.23, в котором средство для выполнения обработки режима отслеживания содержит:
средство для выполнения идентификации последовательностей преамбул;
средство для выполнения оценки целочисленного сдвига несущей частоты;
средство для выполнения оценки сегментов;
средство для выполнения оценки сдвига частоты дискретизации и
средство для выполнения синхронизации физического уровня.
26. Устройство по п.23, в котором средство для выполнения грубого обнаружения и синхронизации содержит средство для определения автокорреляции принимаемого сигнала с использованием свойства циклического префикса преамбулы.
27. Устройство по п.23, в котором средство для выполнения точного обнаружения и синхронизации содержит средство для определения автокорреляции, по меньшей мере, одного варианта сигнала преамбулы с использованием сопряженно-симметричного свойства преамбулы.
28. Устройство по п.23, в котором средство для выполнения точного обнаружения и синхронизации содержит средство для определения взаимной корреляции преамбулы относительно опорной преамбулы.
29. Устройство по п.23, в котором средство для выполнения обработки режима отслеживания содержит средство для определения взаимной корреляции между принимаемым сигналом и возможными последовательностями преамбул.
30. Устройство по п.23, в котором грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются последовательно.
31. Устройство по п.23, в котором грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются одновременно.
32. Устройство по п.23, при этом устройство выполнено с возможностью использования в системе беспроводной связи, которая использует мультиплексирование с ортогональным частотным разделением каналов.
33. Устройство по п.23, при этом устройство является пользовательским терминалом.
34. Машиночитаемый носитель информации, содержащий инструкции, сохраненные на нем, которые, при исполнении компьютером, предписывают компьютеру выполнять способ синхронизации и обнаружения в беспроводном устройстве, причем инструкции содержат:
код для выполнения грубого обнаружения и синхронизации относительно принимаемого сигнала;
код для выполнения точного обнаружения и синхронизации для вхождения в синхронизм с принимаемым сигналом, при этом результаты грубого обнаружения и синхронизации используются для точного обнаружения и синхронизации; и
код для выполнения обработки режима отслеживания, когда вхождение в синхронизм с принимаемым сигналом достигнуто,
причем код для выполнения грубого обнаружения и синхронизации содержит:
код для выполнения грубого обнаружения сигналов;
код для выполнения грубого обнаружения преамбул;
код для выполнения грубого обнаружения границ символов и
код для выполнения оценки дробного сдвига несущей частоты.
35. Машиночитаемый носитель информации по п.34, причем код для выполнения точного обнаружения и синхронизации содержит:
код для выполнения точного обнаружения сигналов;
код для выполнения точного обнаружения преамбул и
код для выполнения точного обнаружения границ символов.
36. Машиночитаемый носитель информации по п.34, причем код для выполнения обработки режима отслеживания содержит;
код для выполнения идентификации последовательностей преамбул;
код для выполнения оценки целочисленного сдвига несущей частоты;
код для выполнения оценки сегментов;
код для выполнения оценки сдвига частоты дискретизации и
код для выполнения синхронизации физического уровня.
37. Машиночитаемый носитель информации по п.34, причем код для выполнения грубого обнаружения и синхронизации содержит код для определения автокорреляции принимаемого сигнала с использованием свойства циклического префикса преамбулы.
38. Машиночитаемый носитель информации по п.34, причем код для выполнения точного обнаружения и синхронизации содержит код для определения автокорреляции, по меньшей мере, одного варианта сигнала преамбулы с использованием сопряженно-симметричного свойства преамбулы.
39. Машиночитаемый носитель информации по п.34, причем код для выполнения точного обнаружения и синхронизации содержит код для определения взаимной корреляции преамбулы относительно опорной преамбулы.
40. Машиночитаемый носитель информации по п.34, причем код для выполнения обработки режима отслеживания содержит код для определения взаимной корреляции между принимаемым сигналом и возможными последовательностями преамбул.
41. Машиночитаемый носитель информации по п.34, причем грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются последовательно.
42. Машиночитаемый носитель информации по п.34, причем грубое обнаружение и синхронизация и точное обнаружение и синхронизация выполняются одновременно.
43. Машиночитаемый носитель информации по п.34, причем машиночитаемый носитель информации выполнен с возможностью использования в беспроводном устройстве, которое является частью системы беспроводной связи, которая использует мультиплексирование с ортогональным частотным разделением каналов.
44. Машиночитаемый носитель информации по п.34, причем машиночитаемый носитель информации выполнен с возможностью использования в пользовательском терминале.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 1999 |
|
RU2233033C2 |
| US 6219333 B1, 17.04.2001 | |||
| US 6807241 B1, 19.10.2004 | |||
| US 6959050 B2, 25.10.2005. | |||

