ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение в целом относится к заданию конфигурации устройства в сети. Конкретно оно относится к способу и устройству, предназначенным для установки соответствия фактического устройства в сети беспроводной связи соответствующему устройству на плане размещения таких устройств.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Системы управления освещением становятся обычным явлением на предприятиях торговых и бытового назначения. Многие из этих систем содержат устройства, которые могут взаимодействовать беспроводным образом, что вносит в систему возможность повышенной приспособляемости, поскольку все линии связи являются полностью программируемыми. Системы управления освещением обычно монтируются в соответствии с подробным планом здания, указывающим местоположение каждого устройства. Информация относительно плана здания хранится в виде записей в базе данных, используемой программой, предназначенной для управления системой. Записи также включают в состав функциональность каждого устройства, которая либо была введена вручную, либо получена с использованием алгоритмов программы. Для возможности программе взаимодействовать с узлами сети, должен быть добавлен идентификационный номер (ID) каждого узла к записи, соответствующей этому узлу. После завершения монтажа системы обычно выполняется процесс установки соответствия каждого хранимого узла в компьютерной программе с идентификационным номером фактического узла в сети. Процесс обычно включает в себя этапы считывания инженером по осветительной технике штрихового кода каждого смонтированного устройства и ввода вручную значения ID для каждого устройства в системе с использованием графического пользовательского интерфейса. Чтобы помнить, какой ID или штриховой код соответствовал каждому устройству во время выполнения ввода значений ID, на распечатку плана здания обычно наклеиваются штриховые коды с тем, чтобы значения ID могли вводиться в программу впоследствии. Однако этот процесс является трудоемким и предрасположен к ошибкам. Следовательно, имеется необходимость автоматизировать этот процесс.
В заявке на патент № IB 2006/050721 описывается автоматизированный пуск в эксплуатацию беспроводной осветительной системы согласно измерениям дальностей способом триангуляции исходя из известных устройств внутри сети и установке соответствия этих устройств в системе с соответствующими записями в плане здания. Как только позиция нового устройства установлена, оно может использоваться в качестве дополнительной опорной точки. Этот процесс может продолжаться, пока не будут идентифицированы все устройства на всем этаже или всем здании. Однако чтобы начинать этот процесс, этап пуска в эксплуатацию обычно требует наличия, по меньшей мере, трех устройств в системе, имеющих известные координаты, которые могут действовать в качестве опорных точек, каковые могут использоваться для определения местоположения других устройств. Эти опорные точки обычно устанавливаются инженером по монтажу с использованием традиционного способа, то есть инженер получает штриховые коды для трех опорных точек, находит записи для устройств в памяти компьютера, используемого для выполнения пуска в эксплуатацию, и сохраняет значения ID в соответствующих записях. После того, как опорные точки были установлены, может начинаться автоматическое выполнение пуска в эксплуатацию.
Кроме того, иногда желательно иметь более трех опорных точек, например, если некоторые из опорных точек расположены вне дальности передачи конкретного устройства. Этап установления опорных точек является трудоемким и подвержен ошибкам. Кроме того, чем больше число требуемых опорных точек, тем выше вероятность ошибки.
В патенте США № 2005/0228613 также раскрывается способ определения позиции узлов в сети по отношению к опорным узлам, имеющим известные позиции в сети.
Изобретение направлено на решение обсужденных выше проблем.
В соответствии с изобретением обеспечивается способ установки соответствия фактического устройства в сети беспроводной связи соответствующему устройству, указанному в плане для этих устройств, способ содержит этап идентификации в плане устройства, имеющего уникальные характеристики по сравнению с другими устройствами в плане; этап приема из сети беспроводной связи данных, содержащих характеристики фактического устройства; и в ответ на характеристики фактического устройства, включающие в состав уникальные характеристики, этап установки соответствия физического устройства с идентифицированным устройством.
План может содержать предназначенную для каждого устройства запись, указывающую координаты этого устройства в системе координат. Принятые данные могут включать в себя уникальный ID упомянутого фактического устройства, и способ может дополнительно содержать этап сохранения уникального ID в записи для идентифицированного устройства.
Следовательно, изобретение обеспечивает способ установления опорных узлов без требования, чтобы пользователь считывал штриховые коды узлов и вводил значения ID в компьютерной системе вручную.
Уникальная характеристика может содержать уникальный тип устройства или уникальную дальность расстояния по отношению к другому устройству в системе. Принятые данные от упомянутого фактического устройства могут включать в состав тип упомянутого фактического устройства и значения измерений дальностей действия между упомянутым фактическим устройством и его соседними. Тип может включать в себя, по меньшей мере, одно из марки, модели и числа конечных точек для упомянутого фактического устройства.
Например, одно устройство может быть идентифицировано, поскольку в системе оно является единственным осветительным устройством конкретной модели, и переключатель может быть идентифицирован, поскольку он является переключателем, наиболее близко расположенным к идентифицированному осветительному устройству из всех переключателей в системе.
Значения измерений дальностей действия могут быть получены путем анализа сигналов, посланных от фактического устройства на его соседние устройства, или сигналов, посланных от соседних устройств на фактическое устройство. В соответствии с изобретением также обеспечивается компьютерная программа, содержащая компьютерно-исполняемые команды, которые при исполнении посредством процессора обеспечивают выполнение процессором способа, как изложено выше.
Еще дополнительно, в соответствии с изобретением также обеспечивается устройство, содержащее средство для соединения с сетью беспроводной связи; память для хранения информации, соответствующей плану устройств в упомянутой сети беспроводной связи; средство для идентификации в плане устройства, имеющего уникальные характеристики по сравнению с другими устройствами, имеющимися в плане; средство для приема из сети беспроводной связи данных, содержащих характеристики фактического устройства; и средство для установки соответствия фактического устройства с идентифицированным устройством, если характеристики, указанные в принятых от фактического устройства данных, включают в себя уникальные характеристики.
Информация, соответствующая плану устройств, может включать в себя запись для каждого устройства, указывающую координаты каждого устройства в системе координат. Принятые данные могут включать в состав уникальный идентификационный номер (ID) упомянутого фактического устройства, и средство установки соответствия способно сохранять уникальный ID в записи для упомянутого идентифицированного устройства.
Уникальные характеристики могут содержать уникальный тип устройства или уникальную дальность расстояния по отношению к другому устройству в системе. Принятые от упомянутого фактического устройства данные могут включать в состав тип упомянутого фактического устройства и значения измерений дальностей между упомянутым фактическим устройством и его соседними устройствами.
Система беспроводной связи может быть системой освещения или сетью бытовой автоматизации. Устройство может быть персональным компьютером.
Устройство может образовывать часть системы, содержащей множество устройств, соединенных в сети беспроводной связи, причем множество устройств содержит, по меньшей мере, один шлюз, действующий для обмена информацией с устройством. Шлюзу может задаваться конфигурация с возможностью обмена информацией с упомянутым устройством по линии связи локальной вычислительной сети (ЛВС, LAN). Набор устройств может содержать несколько устройств по стандарту ZigBee (протокол IEEE 802.15.4).
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
Теперь варианты осуществления изобретения в качестве примера будут описаны со ссылкой на сопроводительные чертежи, на которых:
Фиг. 1 - схематическая иллюстрация плана здания для системы управления освещением;
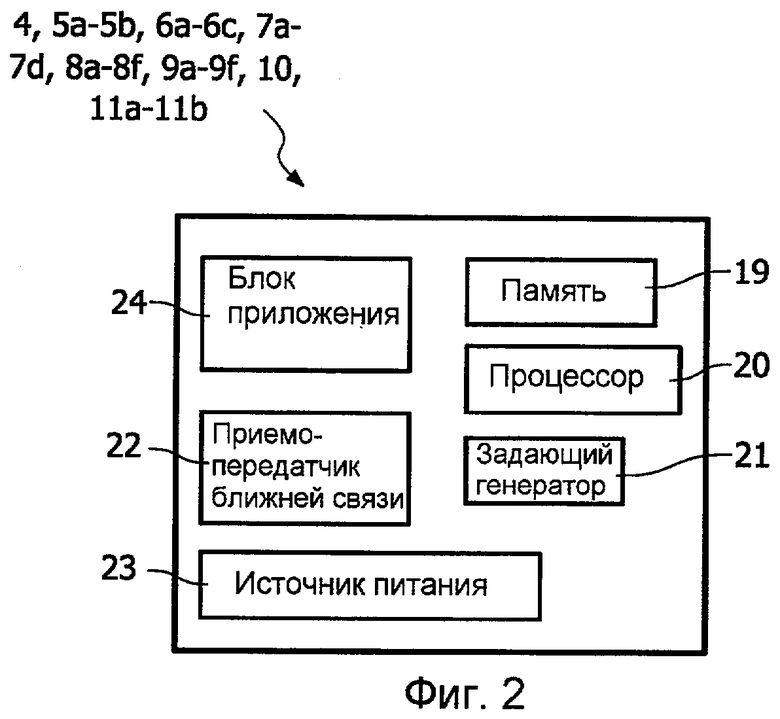
Фиг. 2 - схематическое представление осветительного устройства, переключателя или датчика присутствия для системы управления освещением;
Фиг. 3 - схематическое представление шлюза системы;
Фиг. 4 - схематическое представление центрального устройства обработки, предназначенного для управления системой управления освещением;
Фиг. 5 - иллюстрация процедур, связанных с системой управления освещением;
Фиг. 6 - иллюстрация процесса обнаружения узлов системы управления освещением;
Фиг. 7 - иллюстрация в соответствии с изобретением способа начала процесса пуска в эксплуатацию;
Фиг. 8 - схематический показ некоторых узлов, между которыми посылаются сообщения для выполнения способа, проиллюстрированного на Фиг. 7;
Фиг. 9 - показ таблицы с перечнем значений измерений расстояний между узлами в системе;
Фиг. 10 - показ таблицы с перечнем вычисленных расстояний между узлами, указанными на плане здания;
Фиг. 11 - показ процесса установления опорных узлов в соответствии с изобретением;
Фиг. 12 - иллюстрация одного способа установления координат узла в системе по отношению к нескольким опорным узлам;
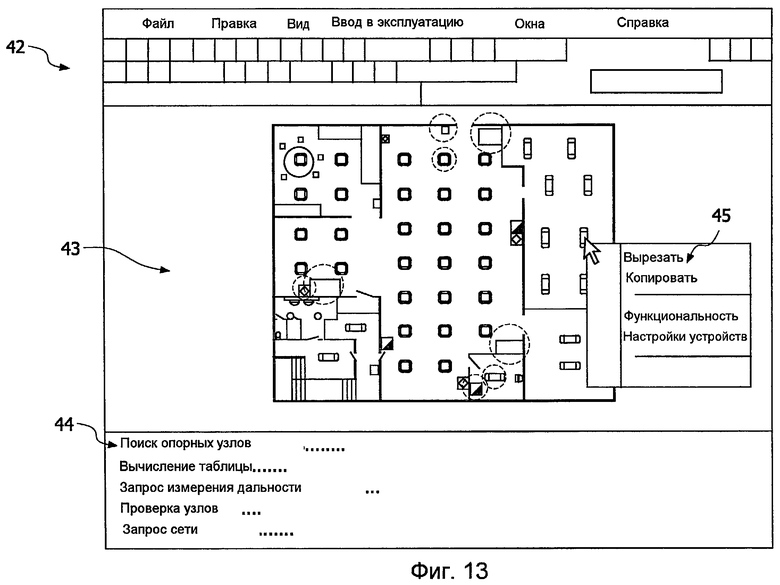
Фиг. 13 - пример графического пользовательского интерфейса, предназначенного для пуска в эксплуатацию системы управления освещением.
План 1 здания для системы 2 управления освещением показан на Фиг. 1. Система включает в себя несколько шлюзовых устройств 3a-3c, переключателей 4, 5a, 5b, 6a-6c, датчиков 7a-7d присутствия и осветительных устройств 8a-8f, 9a-9f, 10, 11a и 11b, которым задана конфигурация с возможностью обмена информацией друг с другом в сети беспроводной связи. Шлюзы 3-3c также включают в себя функциональные средства, предназначенные для соединения сети беспроводной связи с внешней сетью. Система может проходить по нескольким этажам, но на Фиг. 1 показаны только устройства, расположенные на одном этаже.
План здания показывает служебное помещение, включающее в себя открытую зону 12, несколько персональных служебных помещений 13a-13c, серверный зал 14, кухню 15, туалетную комнату 16 и прихожую 17, включая лестницу. Устройства в системе имеют большое количество различных типов, определяемых согласно, например, их функциональности, марке, модели и числу конечных точек. Конечной точкой является компонент устройства, который нуждается в управлении отдельно от остальных компонентов в системе, например несколько соединенных вместе электроламп, или компонент, который управляет другими конечными точками, например несколькими кнопками на устройстве переключателя. Различные типы устройств в системе обозначаются различными позициями, тогда как устройства одинакового типа обозначаются отличной буквой алфавита.
Переключатели в системе 2 появляются в трех различных типах, переключателя 4 у одного из входов на этажи, который может использоваться для включения и выключения светильников, расположенных на этом этаже, двух переключателей 5a и 5b в кухне и на лестнице, соответственно, для управления светильниками в кухне и на лестнице и трех переключателей 6a-6c с регулятором освещенности, расположенных в различных местах по всему служебному помещению. Обеспечиваются также осветительные устройства различных типов, включающие в состав потолочные светильники 8a-8f для кухни и открытой зоны, потолочные светильники 9a-9f для персональных служебных помещений и лестницы, специальную лампу для серверного зала 10 и два потолочных светильника 11a и 11b в туалетной комнате.
Каждое устройство системы содержит приемопередатчик беспроводной связи, чтобы позволять устройству действовать в качестве узла в сети беспроводной связи. Приемопередатчик беспроводной связи может, например, работать в соответствии с протоколом ZigBee™. Согласно стандарту ZigBee™ десятки тысяч устройств могут быть соединены посредством беспроводной связи, чтобы образовывать сеть. Однако может быть желательным разделять устройства на несколько отдельных сетей для более простого управления. Обычно для каждого этажа используется отдельная сеть. Устройство, работающее по протоколу ZigBee, работает в полосах радиочастот 2,4 ГГц, 915 МГц и/или 868 МГц; поддерживает скорости передачи необработанных данных 250 килобит в секунду (Кбит/с), 40 Кбит/с и 20 Кбит/с соответственно и имеет дальность передачи обычно между 10 и 75 метрами. Однако для того чтобы снизить стоимости узлов, дальность передачи может быть между 2 и 5 метрами. Имеются три основных типа ZigBee-устройств, а именно сетевой контроллер, маршрутизатор и оконечное устройство. В сети могут быть тысячи маршрутизаторов и оконечных устройств, но только один сетевой контроллер. Маршрутизаторы могут маршрутизировать сообщения от одного узла на другой. Оконечные устройства могут лишь осуществлять ответ на узел, который инициировал разговор. Устройства системы, которые не соединяются с питающей сетью, могут обеспечиваться в виде оконечных устройств, поскольку оконечные устройства требуют меньшую мощность и могут (продолжать) работать на аккумуляторной батарее. В системе по Фиг. 1, по меньшей мере, все шлюзы 3a-3c имеют функциональную возможность маршрутизатора, но только один из маршрутизаторов действует в качестве координатора сети.
В альтернативном варианте осуществления сеть может быть разложена на меньшие подсети, при этом каждый шлюз является координатором подсети. Один из шлюзов может затем действовать в качестве ведущего координатора.
Приемопередатчики беспроводной связи позволяют устройствам системы взаимодействовать с центральным устройством 18 обработки через шлюзы 3a-3c. Центральным устройством обработки может быть персональный компьютер (ПК, PC) или портативная ЭВМ, расположенная в серверном зале 14. Центральное устройство обработки также может располагаться вне системы. И центральное устройство обработки, и шлюзы соединяются с локальной сетью (ЛВС), например, Ethernet. Однако следует ясно представлять, что линия связи между ПК и шлюзами также может быть беспроводной, например, в виде части сети стандарта WiFi, сети ZigBee или любой другой подходящей сети. Ниже в документе сеть, поверх которой взаимодействуют ПК и шлюзы, будет описываться в виде сети Ethernet. Однако следует представлять, что это является лишь примером.
В отношении Фиг. 2, устройство в составе системы, которым может быть переключатель 4, 5a-5b, 6a-6c, датчик 7a-7d присутствия или осветительное устройство 8a-8f, 9a-9f, 10, 11a-11b, содержит память 19, процессор 20, задающий генератор 21, приемопередатчик 22 ближней связи, работающий в соответствии с протоколом ZigBee, источник 23 питания и модуль 24 приложения. Модуль 24 приложения определяет, является ли устройство осветительным устройством, переключателем или датчиком присутствия. Он также определяет, каков тип, например, модель, марка и количество конечных точек осветительного устройства, переключателя или датчика присутствия. Например, если устройством является осветительное устройство, приложение 24 обеспечивает источник света. Если устройством является переключатель, модуль приложения обеспечивает функциональность переключения, и если устройством является датчик присутствия, модуль 19 приложения обеспечивает функциональность обнаружения.
Команды и установочные параметры для обработки в системе, такие как, например, значения ID осветительных устройств, которыми переключатель управляет, если устройством является переключатель, хранятся в памяти 19 устройства. Однако является возможным, что шлюз может хранить наибольшую часть команд и исполнять наибольшую часть обработки для устройства, если, например, устройство подвергается ограничениям по электропитанию. Процессор может быть микропроцессором. Однако может использоваться любой подходящий процессор. Источником питания является либо аккумуляторная батарея, либо соединение с питающей сетью в зависимости от типа и местоположения устройства.
В отношении Фиг. 3, шлюз 3a-3b также содержит память 25, процессор 26, задающий генератор 27, блок 28 приемопередатчика ближнего действия и источник 29 питания. Однако, вероятно, что память шлюза и вычислительная мощность процессора будут более совершенными, чем память и вычислительная мощность устройства, показанного на Фиг. 2, поскольку шлюз должен вести и обрабатывать информацию для нескольких узлов. Источником питания является обычно соединение с питающей сетью. Шлюз также содержит сетевой интерфейс 30 для выполнения соединения с сетью Ethernet.
Что касается Фиг. 4, центральное устройство обработки в форме персонального компьютера содержит процессор 31, соединенный с памятью 32, такой как оперативное запоминающее устройство (ОЗУ, RAM), и хранилищем 33, таким как постоянное запоминающее устройство (ПЗУ, ROM). Процессор 31 также соединяется с интерфейсом 34 съемного хранилища, например дисковода компакт-диска или дисковода гибкого диска. Процессор принимает команды пользователя от одного или нескольких пользовательских устройств 35 ввода, таких как мышь или вспомогательная клавиатура, и передает информацию пользователю, используя устройство 36 отображения. Процессор также может обеспечивать связь с сетевым интерфейсом 37, таким как считыватель сетевой карты Ethernet. Процессор, память, хранилище, интерфейс съемного хранилища, пользовательские устройства ввода, устройство отображения и сетевой интерфейс все взаимодействуют друг с другом с использованием шины 38.
В зависимости от типа помещения, в котором установлено устройство, времени дня и времени года может требоваться различная функциональность устройства. Например, во время монтажа находящимся на кухне потолочным светильникам 8e, 8f может быть задана конфигурация с возможностью включения в ответ на обнаружение датчиком 7a присутствия людей в открытой зоне 12 служебного помещения. Однако позднее конфигурация потолочных светильников может быть изменена с возможностью управления только переключателем 5a в кухне 15. Кроме того, с 8:00 до 18:00 по рабочим дням светильники в прихожей могут быть включенными постоянно, но им может быть задана конфигурация, чтобы после 18:00 включаться, только когда приводится в действие переключатель 5b, и в таком случае только на промежуток времени в десять минут прежде, чем выключиться снова.
Функциональность может задаваться с использованием компьютерной программы, исполняемой на компьютере 18, находящемся в серверном зале 14. В качестве альтернативы, функциональность может задаваться в другом местоположении и передаваться на компьютер с использованием интерфейса 34 съемного запоминающего хранилища или сетевого интерфейса 37 компьютера 18. Программа также может исполнять алгоритмы автоматического получения групп элементов в составе системы, например осветительные устройства, которые управляются посредством конкретного переключателя. Команды, предназначенные для реализации функциональности, посылаются от компьютера 18 на устройства в сети через Ethernet и шлюзы 3a-3c.
Что касается Фиг. 5, процессы, связанные с системой управления освещением, включают в себя разработку проекта системы 5.1, установку системы 5.2, пуск в эксплуатацию системы 5.3, рабочий режим системы 5.4 и внесение изменений в систему 5.5. После того, как в систему были внесены изменения, система может приводиться в действие снова 5.4 с внесенными изменениями.
Обычно используется единый программный комплект для всех процессов по Фиг. 5. Программа обычно также предоставляет графический пользовательский интерфейс, чтобы давать пользователю возможность более простого и интуитивного взаимодействия с устройствами и данными, хранимыми в системе. Программное обеспечение может основываться на традиционном программном обеспечении, таком как AutoCAD™ или LonMaker™. Разработка проекта системы может включать в себя этапы импортирования архитектурного чертежа здания в графический пользовательский интерфейс и задания местоположения устройств по отношению к архитектурному чертежу. Затем может быть установлена система координат по отношению к чертежам, и могут быть вычислены координаты каждого устройства. Функциональность может задаваться вручную для каждого устройства с использованием графического пользовательского интерфейса и/или определяться автоматически с использованием алгоритмов, которые образуют часть программного комплекта. Например, алгоритм может идентифицировать осветительные устройства, наиболее близко расположенные к конкретному переключателю или датчику присутствия, и устанавливать линии связи между осветительными устройствами и переключателем/датчиком присутствия. Установка системы включает в себя монтаж инженером устройств в соответствии с планом здания. После того, как устройства были смонтированы, система может запускаться в эксплуатацию. Процесс пуска в эксплуатацию будет описан более подробно ниже в отношении Фиг. 6-11. Когда процесс пуска в эксплуатацию завершен, система может приводиться в действие. Команды и установочные параметры хранятся в шлюзах, и сеть беспроводной связи может работать независимо от данных и программ, хранимых в компьютере. Однако программный комплект используется, чтобы вносить изменения в функциональность действующей системы, если требуется впоследствии. Например, некоторые из устройств могут быть перемещены и поэтому могут потребоваться новые команды, чтобы обеспечить требуемую функциональность в новом местоположении. Кроме того, система также может обновляться, чтобы обеспечивать новую функциональность. После внесения изменений, на сеть посылаются новые команды, и сеть может продолжать работать с внесенными изменениями.
Теперь со ссылками на Фиг. 6-11 будет описан процесс пуска в эксплуатацию системы. Процесс пуска в эксплуатацию обычно начинается после того, как были смонтированы все устройства. Инженер, находящийся либо на месте эксплуатации, либо вне его, начинает процесс пуска в эксплуатацию. Является предпочтительным, чтобы инженер находился на месте эксплуатации, чтобы вручную разрешать какие-либо проблемы, которые могут возникать. Однако также является возможным, чтобы инженер запускал в эксплуатацию систему удаленно посредством соединения, например, по ЛВС или Интернет с компьютером 18, находящимся на месте эксплуатации. Программа для пуска в эксплуатацию системы освещения и управления ею используется инженером для подготовки системы к эксплуатации. Ниже в документе, наряду с некоторыми записями и установочными параметрами, будет описана программа, подлежащая загрузке на компьютер 18, находящийся на месте эксплуатации. Однако следует понимать, что программа также может исполняться на удаленном компьютере, соединенном с компьютером 18, находящимся на месте эксплуатации, или возможно посредством диспетчерского сетевого узла, такого как шлюзовое устройство.
Что касается Фиг. 6, на этапе 6.1 узлы подключаются к питанию. Обычно это выполняется путем включения питания для системы, что может выполняться либо вручную, либо с использованием графического пользовательского интерфейса компьютерной программы, предназначенной для управления системой. При включения питания все узлы обращаются к каналу управления, и инициируется процесс обнаружения. На этапе 6.2 каждый узел посылает сообщение, чтобы "известить" о своем присутствии. Сообщение содержит тип, включая в себя, например, функциональность и число конечных точек, и ID узла, от которого исходит сообщение. Сообщение также включает в себя запрос других узлов на идентификацию самих себя. На этапе 6.3 каждый узел после произвольно выбранного интервала времени отвечает на запрос представлением своей идентификационной информации, функциональности и числа конечных точек. На этапе 6.4 каждый узел затем создает таблицу связывания для всех доступных узлов и типа(ов) этих узлов. Весьма вероятно, что конкретный узел не является способным соединяться со всеми узлами в системе непосредственно, поскольку некоторые из узлов могут находиться вне дальности действия. Однако все узлы пересылают данные о своих соседних узлах, и с использованием этих данных может быть определен оптимальный маршрут для установления соединения с конкретным узлом. После того, как таблицы связывания были составлены, узлы обычно продолжают посылать новые сообщения обнаружения через равные промежутки времени на случай появления новых узлов.
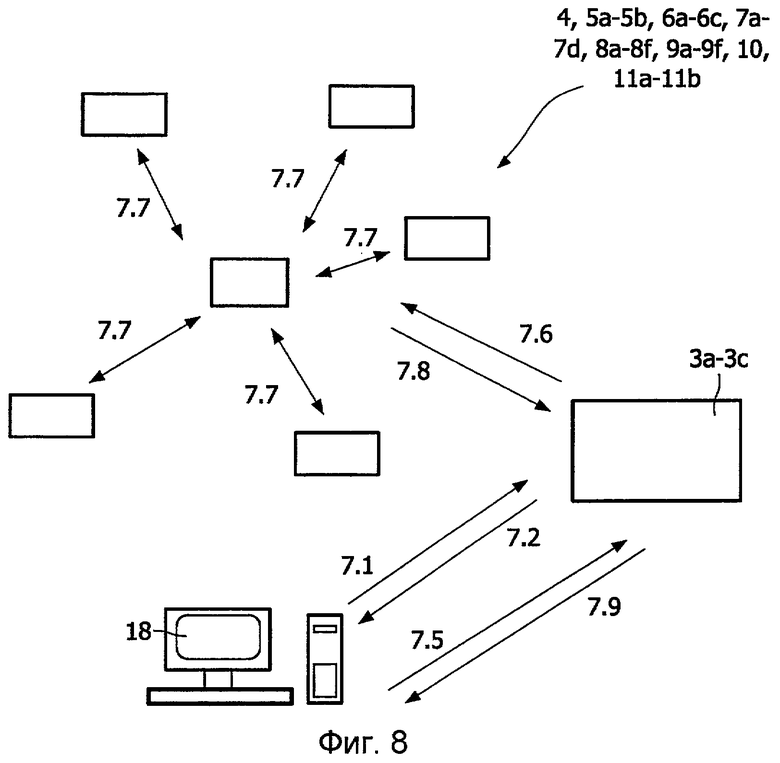
Обращаясь теперь к Фиг. 7 и 8, после процесса обнаружения, который обычно занимает только несколько секунд, на этапе 7.1 инженер-наладчик вводит в систему команду, чтобы запустить процесс установки соответствия сигналов от физических устройств с хранимыми устройствами в базе данных. Команда запускает исполнение компьютером компьютерной программы для посылки запроса на один из шлюзов 3a, 3b или 3c в системе, как показано на Фиг. 8, чтобы получить описание сети. На этапе 7.2 шлюз отвечает представлением значения ID, функциональности и числа конечных точек каждого узла в сети. Затем на этапе 7.3 программа сравнивает количество и типы устройств с количеством и типами, указанными согласно плану здания. Если не все устройства учтены, инженеру может выводиться сообщение об ошибках.
Если все устройства учтены, программа затем составляет перечень узлов, сообщенных сетью, с включением в него значения ID и типа узлов. Например, перечень может быть в порядке возрастания значений ID. На этапе 7.4 программа выбирает первый узел в перечне узлов и передает запрос на измерение дальностей для этого узла. На этапе 7.6 запрос принимается шлюзом и пересылается на интересующий узел, как схематично показано на Фиг. 8. На этапе 7.6 в ответ на прием запроса узел выполняет измерения дальностей со всеми остальными узлами системы, находящимися в пределах его дальности передачи. Во всех сетях, кроме очень больших, узел может находиться в пределах дальности передачи для всех остальных узлов в сети. Соответственно, могут быть получены значения измерений расстояний между узлом и всеми остальными узлами в сети.
Измерения дальности могут выполняться несколькими способами и в документе подробно не будут описываться. Один общий способ включает в себя измерение времени передачи сигнала от первого узла и времени поступления сигнала на второй узел. Расстояние между узлами затем может быть вычислено путем умножения на скорость света времени между временем поступления и временем передачи. Измерение может уточняться и корректироваться на любую временную задержку между сигналами тактовых генераторов 21, 27 двух узлов путем измерения также времени, которое требуется второму сигналу, переданному от второго узла, для передачи на первый узел, и усреднения двух результатов измерений. Любая временная задержка между тактовыми сигналами будет затем компенсирована. Другой известный способ получения измерений расстояний в системах беспроводной связи включает в себя измерение мощности сигнала при его приеме. Ослабление мощности сигнала зависит от расстояния, которое прошел сигнал.
На этапе 7.7 узлы вычисляют дальность по отношению к каждому из своих соседних узлов с использованием любого известного способа и на этапе 7.8 передают на шлюз значения измерений дальности, как показано на Фиг. 8. Если узел имеет сниженные возможности обработки, он может передавать данные измерений на шлюз, и шлюз будет вычислять расстояния между узлами и их соседними.
На этапе 7.9 сигнал, указывающий расстояния между выбранным узлом и его ближайшими соседними, передается на компьютер 18. Когда компьютер принимает (сигнал) измерение дальности, он создает таблицу, причем первый столбец и первая строка таблицы включают в себя перечни значений ID и типов узлов в сети. Таблица дальностей затем обновляется на этапе 7.10 значениями измерений дальности, то есть значение расстояния между первым узлом и вторым узлом представляется на пересечении строки, включающей ID первого узла, и столбца, включающего ID второго узла. Пример части такой таблицы схематично показан на Фиг. 9 и будет описан более подробно ниже.
Компьютер после этого сравнивает номер выбранного узла с общим количеством узлов в перечне, определенном на этапе 7.3. Если номер узла меньше общего количества узлов, процесс переходит на этап 7.12, и n увеличивается на 1. Этапы 7.5-7.10 затем повторяются для следующего узла, пока для всех узлов не будут получены измерения дальностей и не будут сохранены в таблице по Фиг. 9. На Фиг. 8 показаны только значения измерения дальностей, выполненные посредством одного узла, то есть измерения дальностей, выполняемые в результате одиночной итерации внутри цикла, определенного согласно этапам 7.5-7.12 по Фиг. 7. При каждом повторении цикла системой вычисляются значения расстояний между новым узлом и всеми его соседями.
Поскольку все узлы выполняют измерения дальностей, расстояние между двумя узлами определяется дважды, и по запросу на первый узел, и по запросу на второй узел. Это обеспечивает, что все измерения могут быть проверены, и ошибки могут быть выявлены. Например, предусматривается, что если два измерения не совпадают, измерения повторяются.
Когда на этапе 7.11 определяется, что были получены измерения дальностей для всех узлов, процесс переходит на этап 7.13, и программа создает таблицу, соответствующую таблице по Фиг. 9, но содержащую значения для расстояний между узлами, вычисленные предпочтительнее на основании плана здания, чем на основании значений измерений дальностей в системе беспроводной связи. Пример части такой таблицы показан на Фиг. 10. Узлы упорядочены в зависимости от их типа. Две таблицы затем сравниваются на этапе 7.14, чтобы установить соответствие значения ID устройств в первой таблице с устройствами, указанными в плане здания и включенными во вторую таблицу. Сравнение обычно включает в себя два основных процесса. Во-первых, устанавливают начальное число опорных узлов. Во-вторых, получают координаты всех остающихся узлов по отношению к координатам узлов с уже установленным соответствием. Возможно, что в некоторых системах способ, используемый для установления начального числа опорных узлов, может использоваться, чтобы устанавливать соответствие всех узлов в системе. В этом случае, второй основной процесс никогда не выполняется.
Теперь более подробно будут описаны таблицы по фигурам Фиг. 9 и 10. Как описано выше, таблица по Фиг. 9 содержит первый столбец с перечнем значений ID и типов устройств системы и первую строку также с перечнем значений ID и типов устройств системы. В остальной части таблицы затем приводится перечень расстояний между соответственными устройствами системы, как указано согласно измерениям дальностей. Порядок следования узлов, приведенных в таблице, может зависеть от того, каким образом данные для каждого узла были приняты в компьютере 18. Например, вероятно, что они приводятся в порядке возрастания ID. Тип устройств также является включенным. На Фиг. 9 тип указывается с помощью номера ссылочной позиции, используемого на Фиг. 1, то есть 3 указывает шлюз, 4, 5, 6 указывают различные типы переключателей, 7 указывает датчик присутствия и 8, 9, 10 и 11 указывают различные типы осветительных устройств.
Таблица по Фиг. 10 содержит первый столбец с перечнем ссылочных номеров узлов, указанных в плане здания, хранимом в системе, и первую строку также с перечнем номеров каждого узла на плане. В остальной части таблицы затем приводится перечень расстояний между соответственными устройствами в системе в виде вычисленных на основании плана здания. Узлы приводятся в перечне в порядке следования ссылочных номеров по плану здания, то есть первыми в перечне приведены все шлюзы, затем все переключатели, затем датчики присутствия и в заключение все осветительные устройства.
Таблицы по Фиг. 9 и 10 не включают в состав измеренные или вычисленные дальности между всеми узлами. Если два узла находятся вне дальности передачи, в таблице показывается X вместо расстояния между этими двумя устройствами. В других вариантах осуществления используются алгоритмы для вычисления расстояния между двумя устройствами, не находящимися в непосредственной связи друг с другом, и расстояния между устройствами также хранятся в таблице.
В соответствии с изобретением, способ установки соответствия узлов в таблице Фиг. 9 с узлами в таблице Фиг. 10 содержит этап установления опорных узлов в системе. Если позиции неизвестных устройств являются установленными, эти устройства затем могут использоваться в качестве опорных точек для отыскания позиции дополнительных устройств.
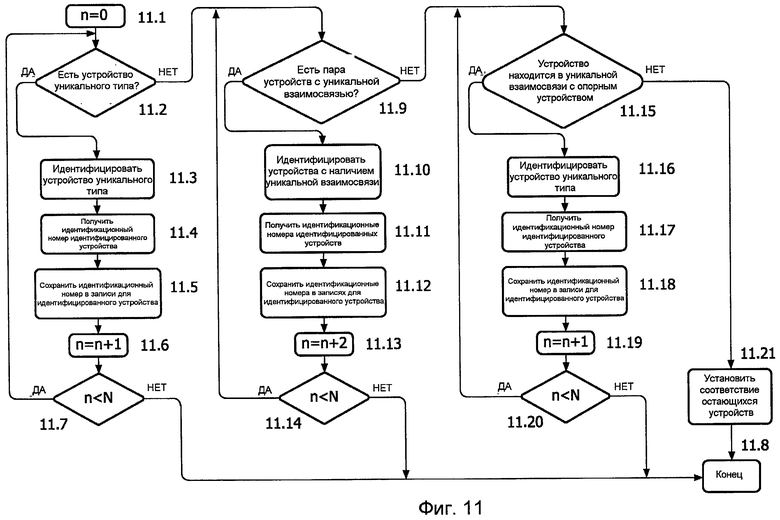
Процесс установления начальных опорных узлов включает в себя этап идентификации узлов, имеющих уникальные характеристики. Например, если система включает в состав одиночный узел конкретного типа, то этот узел может быть легко идентифицирован в обеих таблицах по фигурам Фиг. 9 и 10, и узлы могут быть поставлены в соответствие. В отношении Фиг. 11, на этапе 11.1 алгоритм установления опорных узлов в системе возвращается в исходное положение, то есть количество опорных узлов устанавливается в нуль. На этапе 11.2 программное обеспечение, предназначенное для пуска в эксплуатацию системы, анализирует план здания и идентифицирует в системе узел уникального типа, например переключатель 4, расположенный на входе на этаж. Затем на этапе 11.3 система анализирует информацию, хранимую в таблице по Фиг. 9, и идентифицирует в плане здания узел такого же типа, как узел 4. Информация в таблице Фиг. 9 также включает в состав уникальный ID для этого конкретного узла, то есть 106. На этапе 11.4 система копирует ID из таблицы по Фиг. 9 и сохраняет ID в записи для узла 4 в программе на этапе 11.5. Следовательно, теперь был установлен первый опорный узел, и на этапе 11.6 значение n увеличивается на 1.
На этапе 11.7 система проверяет, является ли n меньше общего количества узлов N в системе. Если n равно или больше N, все узлы в системе были приведены в соответствие, и система переходит на этап 11.8, где процесс установки соответствия узлов завершается. Обратно, если n меньше N, система возвращается на этап 11.2, и выполняется проверка, чтобы определить, имеются ли в системе какие-либо дополнительные узлы уникальных типов.
Если на этапе 11.2 определяется, что в системе еще имеются узлы, имеющие уникальные типы, этапы 11.3-11.7 повторяются, пока не будут найдены все узлы с уникальными типами, и значения ID узлов сохраняются в соответствующих записях для узлов. В системе по Фиг. 1 кроме узла 4 имеется один другой узел уникального типа, а именно узел 10. Узел 10 является единственным осветительным устройством этого типа. Из таблицы по Фиг. 9 ясно, что значением ID узла типа 10 является 109. Этот ID является, следовательно, сохраняемым в записи для светильника 10 в системе на этапе 11.5.
Если на этапе 11.2 определяется, что в системе более нет устройств уникального типа, система переходит на этап 11.9. Теперь система определяет, имеются ли в системе какие-либо два устройства во взаимосвязи, которая является уникальной. Например, датчик 7c присутствия является датчиком присутствия в сети, самым близко расположенным по отношению к шлюзу, а именно к шлюзу 3c. Более подробно, вычисленные расстояния между устройствами в таблице Фиг. 10 указывают, что первый датчик 7a присутствия находится в 5,20 м от шлюза 3a, второй датчик 7b присутствия находится в 5,73 м от первого шлюза 3a и в 6,50 м от второго шлюза 3b, третий датчик 7c присутствия находится в 0,10 м от шлюза 3c, и четвертый датчик присутствия находится в 2,50 м от шлюза 3b. Даже если имеются ошибки в измерениях дальностей, будет просто устанавливать различие между датчиком присутствия, находящимся в 0,1 м от шлюза, и датчиком присутствия, находящимся от шлюза в 2,5 м или далее. Следовательно, будет просто идентифицировать узлы 7c и 3c исходя из информации в таблице по Фиг. 9. Таким образом, на этапе 11.10 идентифицируются датчик 7c присутствия и шлюз 3c.
На этапе 11.11 анализируются измерения дальностей и типы устройств, приведенные на Фиг. 9, чтобы найти датчик 7c присутствия и шлюз 3c. На этапе 11.10 становится понятным, что датчик присутствия с ID 108 находится в 0,10 м от шлюза с ID 111. Следовательно, система делает вывод, что узел с ID 108 должен соответствовать датчику 7c присутствия, и узел с ID 111 должен соответствовать шлюзу 3c. Следовательно, на этапе 11.12 номера 108 и 111 для ID сохраняются в записях для датчика 7c присутствия и шлюза 3c, соответственно. Затем на этапе 11.13 число найденных опорных узлов увеличивается на 2.
На этапе 11.14 проверяется, является ли число уже установленных опорных узлов меньше общего количества узлов в системе. Если число установленных опорных узлов меньше N, процесс возвращается на этап 11.8. Если число установленных опорных узлов равно или больше N, процесс завершается на этапе 11.8.
На этапе 11.9 определяется, имеются ли какие-либо другие пары устройств с уникальными взаимосвязями. Если система не может более найти устройств с такими характеристиками, процесс переходит на этап 11.15, и определяется, имеются ли какие-либо устройства с наличием уникальных взаимосвязей по расстоянию с опорными узлами. План здания по Фиг. 1 указывает, что один из датчиков присутствия, а именно 7d, находится существенно ближе к опорному узлу 10, чем другие датчики 7a-7c присутствия. Следовательно, на этапе 11.15 устанавливается, что в системе имеются устройства с уникальными взаимосвязями по расстоянию по отношению к опорным узлам, и на этапе 11.16 идентифицируется узел 7d. Информация в таблице по Фиг. 9 указывает, что в системе имеются четыре датчика 103, 107, 108 и 113 присутствия. Кроме того, измерения дальностей на Фиг. 9 показывают, что два узла, узлы 103 и 108, находятся вне дальности передачи узла 10. Кроме того, узел 108 уже был установлен в качестве соответствующего узлу 7c. Следовательно, ни узел 103, ни узел 108 не могут соответствовать узлу 7d. Один из остающихся узлов, узел со значением ID 107, находится в 7,8 м от узла 10, тогда как другой остающийся узел, узел с ID 113, находится на расстоянии только 1,2 м от узла 10. Следовательно, даже если имеются значительные ошибки в измерениях дальностей, является разумным предположение, что узел со значением ID 113 соответствует узлу 7d. На этапе 11.17 система, следовательно, делает вывод, что узел 7d должен соответствовать узлу со значением ID 113, и на этапе 11.18 сохраняет ID в записи для узла 7d. На этапе 11.19 n увеличивается на 1, поскольку теперь был установлен дополнительный опорный узел, узел 7d.
На этапе 11.20, если еще не было установлено соответствие всех узлов, повторяется этап 11.15. В противном случае способ завершается на этапе 11.8. Все узлы системы по Фиг. 1 не были приведены в соответствие. Соответственно, система возвращается на этап 11.15. На этапе 11.15 устанавливается, что в системе имеются дополнительные устройства с уникальными взаимосвязями по расстоянию по отношению к опорным узлам, и, следовательно, этапы 11.16-11.19 повторяются. В результате, по меньшей мере, переключатель 6b регулятора освещенности, шлюз 3b и шлюз 3a устанавливаются в качестве опорных узлов. Переключатель 6b регулятора освещенности и шлюз 3b являются переключателем регулятора освещенности и шлюзом, наиболее близкими к опорному узлу 10. Кроме того, шлюз 3a может быть идентифицирован, поскольку он является шлюзом, который намного ближе к опорному узлу 4, чем любой из остальных шлюзов.
В следующий раз, когда система приходит на этап 11.15, может оказаться, что более не имеется устройств, находящихся в уникальных взаимосвязях с любым из опорных узлов. Система затем переходит на этап 11.21, и затем начинается процесс установления координат остальных узлов по отношению к опорным узлам. Остающиеся узлы могут не находиться в четко и безошибочно уникальной взаимосвязи по отношению к конкретному опорному узлу. Однако путем сравнения фактических значений измерений дальностей с вычисленными измерениями дальностей между узлом и рядом установленных опорных узлов будет установлено соответствие. Система установила 8 опорных узлов, а именно узлы с идентификационными номерами 106 (4), 109 (10), 108 (7c), 111 (3c), 113 (7d), 115 (6b), 114 (3b) и 105 (3a). С использованием этих опорных узлов затем могут быть установлены координаты остальных узлов в системе. Как только координаты нового узла найдены, он может использоваться в качестве опорного узла для установки соответствия остающихся устройств.
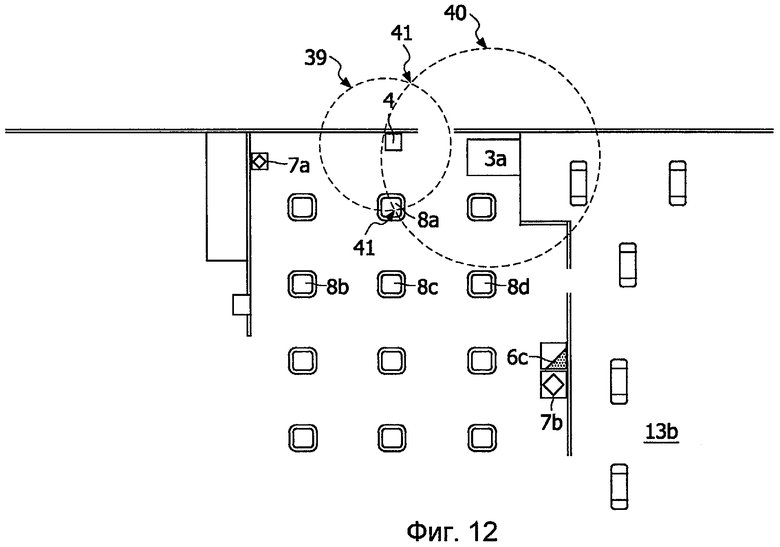
Способ установления координат узла с помощью ссылки на узлы с известными координатами является известным в области техники и не будет в документе описываться подробно. Обычно для каждого узла требуются измерения дальностей, по меньшей мере, по отношению к четырем опорным узлам. Система вычисляет сферическую поверхность вокруг каждого из этих четырех узлов, поверхность, на которой узел может размещаться. Координаты узлов отыскивают на пересечении сферических поверхностей. Если все узлы находятся на высоте потолка, требуются только три измерения дальности. Кроме того, в некоторых обстоятельствах необходимы только два измерения дальности. Например, в отношении Фиг. 12, измерение дальностей между узлом 4 (ID 106) и узлом с ID 101 показывает, что узел с ID 101 может находиться где-либо на сфере 39 вокруг узла 4. Кроме того, измерения дальностей между узлом 3a (ID 105) и узлом с ID 101 показывают, что узел с ID 101 должен находиться где-либо на поверхности сферы 40 вокруг узла 3a. Сферы 39 и 40 пересекаются по окружности 41, однако только один светильник расположен на этой окружности, а именно осветительное устройство, указанное на плане здания как 8a. Следовательно, узел с ID 101 должен соответствовать узлу 8a. Кроме того, вычисленные координаты узла 8a являются известными и в результате они должны быть координатами узла 101.
Обращаясь теперь к Фиг. 13, пример графического пользовательского интерфейса, предназначенного для пуска в эксплуатацию, обновления и рабочего режима системы управления освещением, может содержать набор меню и кнопок 42, главный вид 43 для показа плана здания и меньший вид 44, представляющий перечень текущих процессов, исполняемых системой. План здания 1 показывается в главном виде 43, и показывается заштрихованный контур окружности вокруг каждого узла, соответствие которого было установлено в плане здания. Графический пользовательский интерфейс может предусматривать окружность вокруг каждого устройства, если и когда оно идентифицируется. Следовательно, пользователь может проверять ход выполнения этапов пуска в эксплуатацию. Выбор щелчком по узлу в системе дополнительно запускает открытие меню 45, обеспечивая пользователю необязательные возможности для операций вырезки, копирования, задания конфигурации и изменения установочных параметров устройства.
Одна из необязательных возможностей в меню верхнего уровня включает в состав меню для пуска в эксплуатацию системы. Выбор щелчком по меню может показывать подменю (не показано) для инициации и исполнения отдельного процесса в составе процесса пуска в эксплуатацию. В качестве альтернативы или дополнительно, все процессы могут запускаться последовательно в результате выбора одной из возможностей в подменю. Текущий выполняемый процесс показывается в нижнем окне 44.
Специалистам в данной области техники следует понимать, что хотя изобретение было описано в отношении системы управления освещением, содержащей устройства, работающие в соответствии со стандартом ZigBee, изобретение может быть осуществлено в любой сети беспроводной связи, содержащей устройства, подлежащие приведению в соответствие с информацией, связанной с соответствующими устройствами в плане здания таких устройств, хранимом в компьютерной системе, и что устройства могут работать в соответствии с любым подходящим протоколом беспроводной связи.
Хотя пункты формулы изобретения были сформулированы в данной заявке на патент по отношению к конкретным комбинациям признаков, следует представлять, что объем раскрытия сущности настоящего изобретения также включает в себя любые новые признаки или любую комбинацию новых признаков, раскрытых в документе либо явно, либо неявно, или любого обобщения таковых; относится ли это к такому же изобретению, как непосредственно изложено в каком-либо пункте формулы изобретения, и решает ли оно какую-либо одну или все такие же технические задачи, что и настоящее изобретение. Заявители тем самым объявляют, что могут быть сформулированы новые пункты для таких признаков и/или комбинаций таких признаков в течение рассмотрения настоящей заявки на патент или любой дальнейшей заявки, полученной на основе таковой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ | 2015 |
|
RU2699376C2 |
| ЛОКАЛИЗАЦИЯ, ОСНОВАННАЯ НА СЕТИ ИЗ БЕСПРОВОДНЫХ УЗЛОВ | 2015 |
|
RU2695510C2 |
| СПОСОБ ВЫПОЛНЕНИЯ АВТОМАТИЧЕСКОГО ВВОДА В ДЕЙСТВИЕ СЕТИ | 2011 |
|
RU2589308C2 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕВОДОМ ДОМЕНА БЕСПРОВОДНОГО АДРЕСА В ДОМЕН АДРЕСА ПОЛЕВОГО УСТРОЙСТВА | 2007 |
|
RU2454815C2 |
| СИСТЕМА УПРАВЛЕНИЯ С РАДИОСООБЩЕНИЯМИ, СОДЕРЖАЩИМИ ИНФОРМАЦИЮ О ПОСЛЕДОВАТЕЛЬНОСТИ СООБЩЕНИЙ | 2007 |
|
RU2444848C2 |
| ЭФФЕКТИВНЫЙ СЕТЕВОЙ УРОВЕНЬ ДЛЯ ПРОТОКОЛА IPv6 | 2014 |
|
RU2671993C1 |
| ЭФФЕКТИВНЫЙ СЕТЕВОЙ УРОВЕНЬ ДЛЯ ПРОТОКОЛА IPv6 | 2018 |
|
RU2697642C1 |
| ЭФФЕКТИВНЫЙ СЕТЕВОЙ УРОВЕНЬ ДЛЯ ПРОТОКОЛА IPv6. | 2014 |
|
RU2640726C2 |
| ВЫБОРОЧНОЕ ВКЛЮЧЕНИЕ ПОЛЕВЫХ УСТРОЙСТВ В НИЗКОВОЛЬТНОЙ БЕСПРОВОДНОЙ ЯЧЕИСТОЙ СЕТИ | 2007 |
|
RU2447508C2 |
| УПРАВЛЕНИЕ ЭНЕРГОСБЕРЕЖЕНИЕМ В НИЗКОВОЛЬТНЫХ БЕСПРОВОДНЫХ СЕТЯХ | 2007 |
|
RU2449505C2 |







Изобретение относится к заданию конфигурации устройства в сети. Техническим результатом является уменьшение времени и количества ошибок, связанных с процессом установления соответствия фактических устройств в сети беспроводной связи соответственным устройствам на плане здания. Способ установления соответствия фактического устройства в сети беспроводной связи соответственному устройству на плане таких устройств, содержащий этапы, на которых предоставляют план (1), содержащий множество нанесенных на него устройств, соответствующих множеству фактических устройств; идентифицируют на плане (1) нанесенное на него устройство (3а-3с, 4, 5a-5b, 6a-6c, 7a-7d, 8a-8f, 9a-9f, 10, 11a, 11b), имеющее уникальную характеристику по сравнению с другими устройствами на плане; принимают из сети беспроводной связи данные, содержащие характеристики фактического устройства; сравнивают принятые характеристики с упомянутой уникальной характеристикой и устанавливают соответствие фактического устройства упомянутому нанесенному устройству в ответ на то, что принятые характеристики включают в себя упомянутую уникальную характеристику. 4 н. и 16 з.п. ф-лы, 13 ил.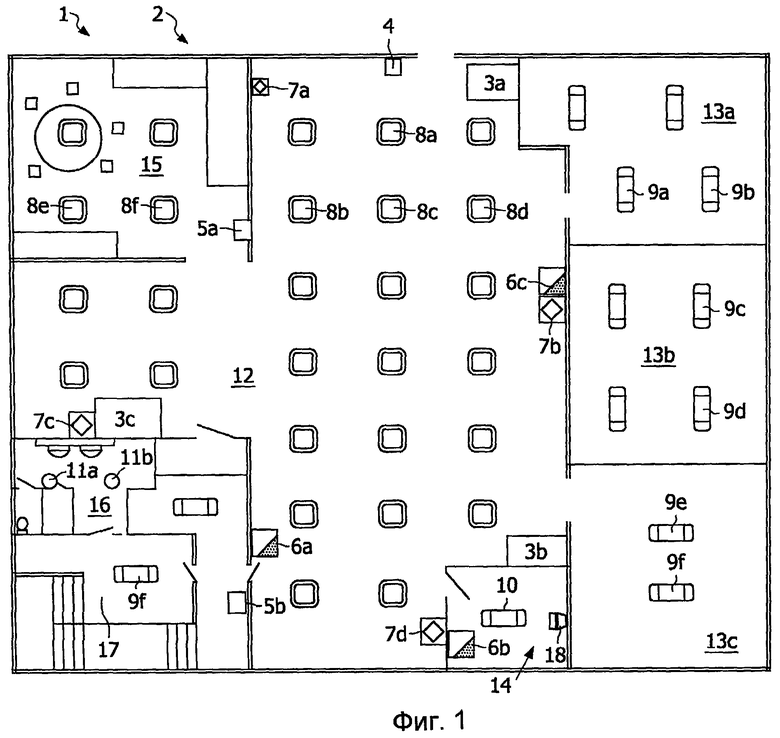
1. Способ установления соответствия фактического устройства в сети беспроводной связи соответственному устройству на плане таких устройств, содержащий этапы, на которых:
предоставляют план (1), содержащий множество нанесенных на него устройств, соответствующих множеству фактических устройств;
идентифицируют на плане (1) нанесенное на него устройство (3а-3 с, 4, 5а-5b, 6а-6 с, 7a-7d, 8a-8f, 9a-9f, 10, 11a, 11b), имеющее уникальную характеристику по сравнению с другими устройствами на плане;
принимают из сети беспроводной связи данные, содержащие характеристики фактического устройства;
сравнивают принятые характеристики с упомянутой уникальной характеристикой; и
устанавливают соответствие фактического устройства упомянутому нанесенному устройству в ответ на то, что принятые характеристики включают в себя упомянутую уникальную характеристику.
2. Способ по п.1, в котором план содержит запись для каждого устройства, указывающую координаты этого устройства в системе координат.
3. Способ по п.2, в котором принятые данные включают в себя уникальный идентификационный номер (ID) (101-115) устройства, при этом способ дополнительно содержит этап, на котором сохраняют уникальный ID в записи для идентифицированного устройства.
4. Способ по п.1, в котором упомянутая уникальная характеристика содержит уникальный тип устройства или уникальную дальность по расстоянию по отношению к другому устройству в сети беспроводной связи.
5. Способ по п.1, в котором принятые данные от фактического устройства включают в себя тип фактического устройства и измерения дальностей между фактическим устройством и устройствами, соседними для этого фактического устройства.
6. Способ по п.5, в котором измерения дальностей получены путем анализа сигналов, посланных от фактического устройства на его соседние устройства, и/или сигналов, посланных с соседних устройств на фактическое устройство.
7. Способ по п.5, в котором тип включает в себя по меньшей мере одно из марки, модели и количества оконечных точек фактического устройства.
8. Машиночитаемый носитель, на котором записана компьютерная программа, содержащая машиноисполняемые команды, которые при их исполнении процессором (31) предписывают процессору выполнять способ по любому из предшествующих пунктов.
9. Машиночитаемый носитель по п.8, в котором компьютерная программа содержит команды для предоставления графического пользовательского интерфейса, включающего в себя графическую индикацию тех устройств, которые были постановлены в соответствие фактическому устройству.
10. Аппаратура (18) для установления соответствия фактического устройства в сети беспроводной связи соответственному устройству на плане таких устройств, содержащая:
средство для соединения с сетью (2) беспроводной связи;
память (32), выполненную с возможностью хранения заранее определенного плана (1), содержащего множество устройств в сети беспроводной связи;
средство для идентификации из упомянутого множества устройств нанесенного на план устройства (3а-3 с, 4, 5a-5b, 6a-6c, 7a-7d, 8a-8f, 9a-9f, 10, 11a, 11b), имеющего уникальную характеристику по сравнению с другими устройствами на плане;
средство для приема из сети беспроводной связи данных, содержащих характеристики фактического устройства;
средство для сравнения принятых характеристик с упомянутой уникальной характеристикой; и
средство для установления соответствия фактического устройства упомянутому нанесенному устройству, если принятые характеристики включают в себя упомянутую уникальную характеристику.
11. Аппаратура (18) по п.10, в которой информация, соответствующая плану устройств, содержит запись для каждого устройства, указывающую координаты каждого устройства в системе координат.
12. Аппаратура по п.11, в которой принятые данные включают в себя уникальный ID (101-115) фактического устройства, при этом средство для установления соответствия выполнено с возможностью сохранять уникальный ID в записи для идентифицированного устройства.
13. Аппаратура (18) по любому из пп.10-12, в которой упомянутая уникальная характеристика содержит уникальный тип устройства или уникальную дальность по расстоянию по отношению к другому устройству в сети беспроводной связи.
14. Аппаратура (18) по п.10, в которой принятые от фактического устройства данные включают в себя тип фактического устройства и измерения расстояния между фактическим устройством и устройствами, соседними для этого фактического устройства.
15. Аппаратура (18) по п.10, при этом система беспроводной связи содержит систему освещения.
16. Аппаратура (18) по п.10, при этом системой беспроводной связи является сеть бытовой автоматизации.
17. Аппаратура по п.10, являющаяся персональным компьютером.
18. Сетевая система, выполненная с возможностью установления соответствия фактического устройства в сети беспроводной связи соответственному устройству, указанному на плане таких устройств, содержащая:
аппаратуру по любому из пп.10-17 и множество устройств, соединенных в сети беспроводной связи, причем это множество устройств содержит по меньшей мере один шлюз (3а-3с), выполненный с возможностью обмена информацией с упомянутой аппаратурой.
19. Система по п.18, в которой упомянутый по меньшей мере один шлюз (3а-3с) выполнен с возможностью обмена информацией с упомянутой аппаратурой (18) по линии связи ЛВС.
20. Система по п.18 или 19, в которой упомянутое множество устройств является множеством устройств стандарта ZigBee.
| US 20030080992 A1, 01.05.2003 | |||
| US 20050228613 A1, 13.10.2005 | |||
| WO 2004057927 A1, 08.07.2004 | |||
| RU 2004138984 A, 10.06.2006. |

