Изобретение относится к области фазированных антенных решеток (ФАР), обеспечивающих формирование диаграммы направленности (ДН) заданной формы, изменяемой в пространстве электронным путем, и используемых в системах связи и радиолокационной технике.
В настоящее время широко используются активные ФАР (АФАР), у которых к каждому излучателю (антенному элементу) подключен передатчик и приемник через развязывающие устройства. В АФАР в режиме передачи излучаемый сигнал передается через многоканальный приемо-передающий тракт, каждый канал которого включает приемную и передающую часть, при этом в передающую часть входят такие узлы, как: делитель мощности, фазовращатель, усилитель мощности, согласующие цепи, излучатель, в приемную часть входят такие узлы, как: малошумящий усилитель (МШУ), фазовращатель, согласующие цепи и т.д. В качестве развязывающего устройства используют циркулятор.
Элементы, образующие каждый узел, не являются абсолютно идентичными. Они имеют отклонения параметров от номинального значения, вызванные погрешностями при изготовлении, температурными воздействиями, старением и т.д. В результате амплитуды и фазы сигналов на выходах разных каналов многоканальной системы будут отличаться от расчетных значений, это вызывает ошибки в амплитудно-фазовом распределении вдоль апертуры АФАР относительно расчетных величин и, в конечном счете, вызывает ухудшение таких важнейших параметров, как коэффициент направленного действия (КНД), коэффициент полезного действия (КПД) АФАР и уровня боковых лепестков (УБЛ). Так, например, уровень боковых лепестков в зависимости от амплитудных и фазовых ошибок в каналах АФАР может возрастать на десятки дБ [Проектирование фазированных антенных решеток. Под ред. Д.И.Воскресенского. М.: Радиотехника, 2003, стр.446-447].
Для сохранения расчетных параметров АФАР в процессе эксплуатации необходимо периодически проводить контроль параметров многоканального приемо-передающего тракта АФАР и его калибровку для восстановления их идентичности всех каналов.
Известен способ контроля диаграммных параметров антенны радиопеленгатора, заключающийся в том, что излучают вспомогательной антенной сигнал, принимают его контролируемой антенной, измеряют мощность сигнала на выходе контролируемой антенны и сравнивают ее с заданным значением [Авторское свидетельство СССР №179800, Кл. G01R 29/10].
Основным недостатком известного способа является необходимость использования вспомогательной антенны, отнесенной от контролируемой АФАР на расстояние дальней зоны, что не всегда возможно при установке АФАР на подвижных носителях, таких, как самолет или автомобиль.
Известен способ встроенного контроля характеристик фазированной антенной решетки, изложенный в [Бубнов Г.Г и др. Коммутационный метод измерения характеристик ФАР. М.: Радио и связь. 1988], основанный на последовательной коммутации фазовращателей и приеме излучаемого сигнала вспомогательной антенной. Основным недостатком известного способа является необходимость использования вспомогательной антенны, отнесенной от контролируемой АФАР на расстояние дальней зоны, что не всегда возможно при установке АФАР на подвижных носителях, таких, как самолет или автомобиль. Таким же недостатком обладает способ встроенного контроля характеристик фазированной антенной решетки, изложенный в [Патент РФ 2169376, МКИ G01R 29/10], в котором тоже используется последовательная коммутация фазовращателей и прием излучаемого сигнала вспомогательной антенной.
Известен способ калибровки антенной решетки [Патент РФ 2147753, Кл. G01S 7/40, 20.04.2000], наиболее близкий к предлагаемому способу и принятый за прототип, в котором для калибровки передающего тракта поочередно подают входной сигнал в каждый канал передающего тракта ФАР, измеряют сигнал, передаваемый каждым каналом передающего тракта, формируют корректирующие коэффициенты для каждого канала передающего тракта на основе результатов измерений, корректирующие коэффициенты используются для регулировки фаз и/или амплитуд передаваемых сигналов.
Для калибровки приемного тракта поочередно подают входной сигнал в каждый канал приемного тракта ФАР, измеряют сигнал, принимаемый каждым каналом приемного тракта, формируют корректирующие коэффициенты для каждого канала приемного тракта на основе результатов измерений, корректирующие коэффициенты используются для регулировки фаз и/или амплитуд приемных сигналов.
Недостатками прототипа являются:
1) ограниченная область применения прототипа только для использования в АФАР с раздельными приемным и передающим трактами: в прототипе рассматриваются раздельные приемная и передающая антенные решетки. Раздельные приемный и передающий тракт подразумевает различающиеся диапазоны частот передаваемых сигналов и принимаемых сигналов, поэтому для калибровки прототипа необходимо использовать сигналы с разной частотой. Прототип невозможно использовать для АФАР с приемо-передающими каналами, каждый из которых включает в себя передающую и приемную части и работает на свой излучатель.
2) Использование измерительного устройства избыточной сложности для обеспечения высокой точности измерений, поскольку в прототипе применяется измерение в процессе калибровки абсолютных параметров сигнала на выходе одного калибруемого канала. В соответствии с формулой и описанием устройства, реализующего прототип, измерительный приемник не имеет никаких связей с остальными устройствами прототипа, на него поступает только измеряемый сигнал. Таким образом, измерительный приемник должен иметь встроенный высокостабильный источник опорного сигнала, с использованием которого будут измеряться изменения параметров принимаемого сигнала во времени. Такой же высокостабильный источник опорного сигнала должен присутствовать в формирователе контрольного сигнала прототипа. Оценим допустимую нестабильность этих двух источников опорных сигналов при измерении фазы сигнала, например, на частоте fc=1800 МГц.
Если задаться допустимым сдвигом фаз между этими сигналами за время калибровки всех каналов Δt=1c не более 10° за счет нестабильности частоты, то это соответствует задержке по времени  , и в соответствии с [Аппаратура для частотных и временных измерений. Под. ред. А.П.Горшкова. М.: Сов. радио, 1971, стр.225] можем найти допустимую относительную нестабильность частоты за время измерений
, и в соответствии с [Аппаратура для частотных и временных измерений. Под. ред. А.П.Горшкова. М.: Сов. радио, 1971, стр.225] можем найти допустимую относительную нестабильность частоты за время измерений  . Если требуются более высокая точность измерения сдвига фаз, например, 3°, то
. Если требуются более высокая точность измерения сдвига фаз, например, 3°, то  требования к стабильности встроенных генераторов будут еще выше, а именно
требования к стабильности встроенных генераторов будут еще выше, а именно  . Такие высокие требования к допустимой нестабильности частоты можно обеспечить только применением дорогих, сложных и имеющих большие габаритные размеры стандартов частоты - рубидиевых или цезиевых.
. Такие высокие требования к допустимой нестабильности частоты можно обеспечить только применением дорогих, сложных и имеющих большие габаритные размеры стандартов частоты - рубидиевых или цезиевых.
Таким образом, принятый в прототипе метод измерения одного сигнала значительно усложняет и удорожает прототип.
3) Использование для контроля сигнала произвольной формы, что снижает точность измерений по сравнению с использованием синусоидального сигнала. Спектр сигнала произвольной формы всегда обогащен гармоническими составляющими. При этом наличие гармоник вызывает увеличение погрешности измерений. Так, в соответствии с [Глинченко А.С., Кузнецкий С.С. и др. Цифровые методы измерения сдвига фаз. Новосибирск.: Наука, 1979, стр.53-59] наличие гармоник в сигнале вызывает значительные погрешности измерения фазы, величина которых достигает десятков градусов.
Целью предлагаемого изобретения является расширение области применения и повышение точности калибровки.
Для достижения указанной цели предлагается способ калибровки АФАР, в котором для калибровки приемной части приемо-передающего канала подают контрольный сигнал на вход приемной части каждого канала, измеряют параметры принимаемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые далее используются для регулировки параметров приемной части канала, для калибровки передающей части приемопередающего канала подают контрольный сигнал на вход передающей части каждого канала, измеряют параметры передаваемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые далее используются для регулировки параметров канала передающего тракта.
Согласно изобретению, калибровка приемной части приемо-передающих каналов производится парами в режиме приема, при этом контрольный сигнал снимается с выхода приемной части приемо-передающих каналов, калибровка передающей части приемо-передающих каналов производится парами в режиме передачи, при этом для калибровки используют часть мощности сигнала, ответвленного с выхода соответствующего приемо-передающего канала и прошедшего через приемную часть этого канала, в процессе калибровки измеряют сдвиг фазы и разницу амплитуд сигнала с выхода калибруемого канала относительно опорного, в качестве опорного для калибровки всех каналов используется один и тот же канал, например первый, для калибровки используется синусоидальный сигнал с частотой в рабочем диапазоне частот АФАР.
Проведенный сравнительный анализ заявленного способа и прототипа показывает, что заявленный способ отличается тем, что:
- в прототипе измеряются абсолютные значения фазы и амплитуды сигналов на выходах каналов, в предлагаемом способе изменены условия выполнения измерения параметров калибруемого канала - измеряются не абсолютные значения параметров контрольного сигнала, а разностные параметры (разность фаз и амплитуд) сигналов на выходе двух каналов - калибруемого и опорного, что значительно удешевляет измерительную аппаратуру и увеличивает точность измерений;
- изменена последовательность калибровки передающей и приемной частей каналов: если в прототипе вначале производится калибровка передающей, а потом приемной частей каналов АФАР, то в предлагаемом способе вначале калибруется приемная часть, а потом передающая часть. Это обусловлено тем, что в предлагаемом способе приемная часть используется в процессе калибровки передающей части, поэтому она должна быть откалибрована первой;
- в прототипе используется сигнал произвольной формы, в предлагаемом способе используется синусоидальный сигнал, что повышает точность калибровки по сравнению с протопопом за счет того, что устраняется влияние нестабильности частоты и формы контрольного сигнала на точность измерений;
- в предлагаемом способе калибровка приемной части приемо-передающего канала производится в режиме приема, а калибровка передающей части приемопередающего канала производится в режиме передачи.
Сочетание отличительных признаков и свойства предлагаемого способа из литературы неизвестны, поэтому он соответствует критерию новизны и изобретательского уровня.
На фиг.1 приведена структурная схема устройства, реализующего калибровку АФАР в соответствии с предлагаемым способом;
на фиг.2 приведена структурная схема блока управления (БУ);
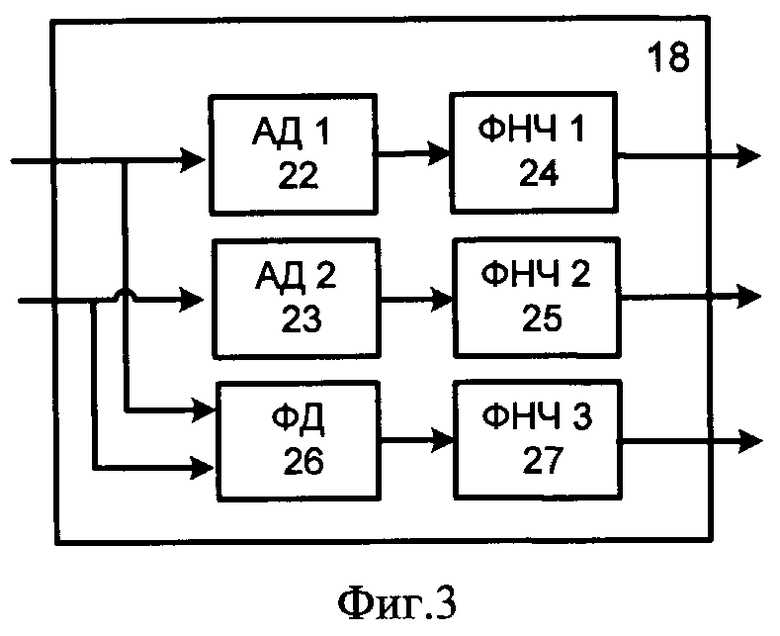
на фиг.3 приведена структурная схема измерителя;
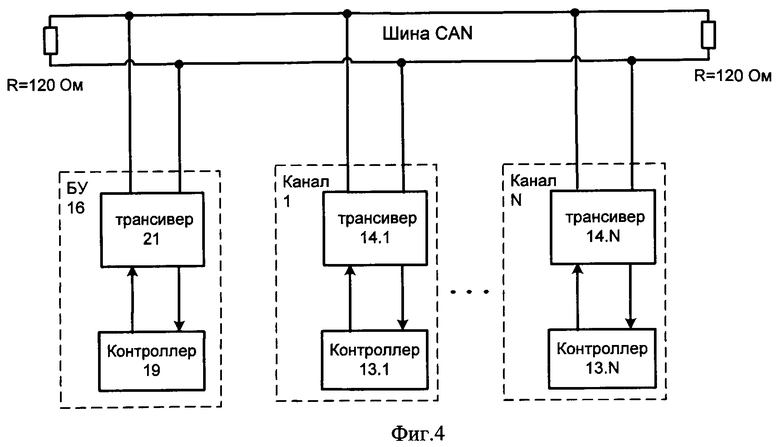
на фиг.4 приведена структурная схема подключения каналов АФАР к магистрали CAN;
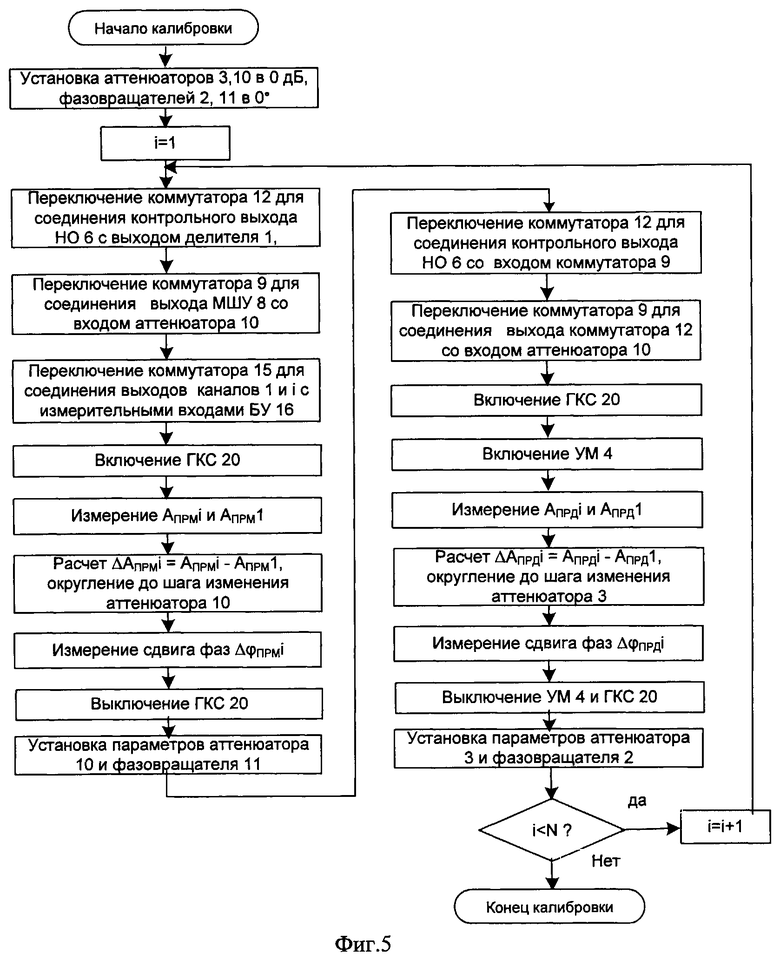
на фиг.5 приведена структурная схема алгоритма работы устройства.
По предлагаемому способу выполняют следующую последовательность операций:
- для калибровки приемной части контрольный сигнал подают в режиме приема на вход приемной части каждого канала;
- сравнивают по очереди параметры сигнала с выхода всех контролируемых каналов с сигналом опорного канала, при этом измеряют разность фаз и амплитуд, формируют на основе измерений корректирующие коэффициенты для каждого канала, которые далее используются для регулировки параметров приемной части приемо-передающего канала;
- для калибровки передающей части канала подают контрольный сигнал на вход передающей части каждого канала в режиме передачи;
- сравнивают по очереди параметры сигнала с выхода всех контролируемых каналов с сигналом опорного канала, при этом измеряют разность фаз и амплитуд, формируют на основе измерений корректирующие коэффициенты для каждого канала, которые далее используются для регулировки параметров передающей части приемо-передающего канала.
Устройство, реализующее предлагаемый способ калибровки ФАР, содержит (фиг.1) N-канальный приемо-передающий тракт, каждый канал которого содержит (для примера на фиг.1 показано содержание первого канала) последовательно соединенные делитель мощности 1, вход которого является входом канала, первый фазовращатель 2, первый аттенюатор 3, усилитель мощности 4, циркулятор 5, направленный ответвитель (НО) 6 и излучатель 7. Второй выход циркулятора 5 подключен к последовательно соединенным малошумящему усилителю с защитным устройством (МШУ) 8, первому коммутатору 9, второму аттенюатору 10, второму фазовращателю 11, выход которого является выходом канала. Контрольный двунаправленный выход НО 6 соединен с первым двунаправленным входом второго коммутатора 12, второй вход и выход которого соединены соответственно со вторым выходом делителя мощности 1 и вторым входом первого коммутатора 9.
Первый, второй, третий, четвертый, пятый, шестой и седьмой выходы контроллеров 13 в каждом канале соединены с управляющими входами второго фазовращателя 11, второго аттенюатора 10, первого коммутатора 9, второго коммутатора 12, усилителя мощности 4, первого аттенюатора 3 и первого фазовращателя 2 соответственно. Вход и выход интерфейса управления контроллера 13 соединены через трансивер 14 с магистралью управления АФАР.
Первый и второй выходы, а также управляющий вход коммутатора 15 соединены с первым и вторым измерительными входами и первым управляющим выходом блока управления 16, а входы коммутатора 15 с первого по N соединены с выходами вторых фазовращателей 11, которые являются выходами с первого по N каналов соответственно.
Второй выход блока управления 16 соединен со входами трансиверов 14 каждого канала, входы которых являются управляющими входами каждого канала АФАР. Третий выход блока управления 16 соединен со входом делителя мощности 17.
Выходы делителя мощности 17 с первого по N соединены со входом делителя мощности 1 каждого канала, вход делителя мощности 1 является входом в каждом канале АФАР.
В составе устройства, реализующего предлагаемый способ калибровки, показаны только блоки, обеспечивающие работу описываемого алгоритма.
Один из вариантов реализации блока управления 16 содержит (фиг.2) измеритель 18, первый и второй входы которого являются измерительными входами БУ 16, а три выхода соединены с измерительными входами контроллера 19, первый выход которого соединен с генератором контрольного сигнала 20, выход которого является третьим выходом БУ 16. Вход и выход интерфейса управления контроллера 19 соединен через трансивер 21 с магистралью управления, которая является вторым выходом БУ 16, третий выход контроллера 19 являются первым управляющим выходом БУ 16.
Контроллеры 13 и 19 могут быть выполнен на основе микроконтроллера типа М16С [Single-chip 16-bit CMOS microcomputer M16C/6N Group. Users manual. Mitsubishi Electric. 1999], который содержит в одной микросхеме 26 измерительных входов, коммутируемых на встроенный 10-разрядный аналого-цифровой преобразователь (АЦП), два выхода встроенного 8-разрядного цифро-аналогового преобразователя (ЦАП), 10 встроенных параллельных портов ввода-вывода, ОЗУ, ПЗУ, встроенный процессор, два встроенных последовательных интерфейса CAN.
Магистраль управления каналов АФАР представляет собой шину с последовательной передачей данных, к которой все управляющие входы каналов подключены параллельно. Это может быть, например, двухпроводная шина CAN, начало и конец которой нагружены на нагрузки 120 Ом. Протокол CAN описан, например, в [CAN specification. Version 2.0., Robert Bosch GmbH, 1991; Кустарев П. Протокол CAN в микроконтроллерах. Электронные компоненты. 2002. №5].
Схема подключения каналов к магистрали CAN приведена на фиг.4 в соответствии с [МАХ3057. ±80V Fault-Protected, 2Mbps, Low Supply Current CAN Transceivers // Maxim Integrated Products. 2002]. В контроллерах 13 и 19 для передачи данных используется встроенный интерфейс CAN.
Трансивер 21 может быть выполнен на основе микросхемы МАХ3050 [Сайт фирмы Maxim Integrated Products Inc. http://www.maxim-ic.com], обеспечивающей работу контроллеров 13 и 19 по магистрали CAN, через которую передаются сигналы управления на все приемо-передающие каналы.
Измеритель 18 содержит (фиг.3) первый 22 и второй 23 амплитудный детектор, входы которых являются первым и вторым входами измерителя, а выходы соединены со входами первого 24 и второго 25 фильтра низкой частоты (ФНЧ) соответственно. Выходы первого 24 и второго 25 ФНЧ являются первым и вторым выходами измерителя соответственно. Первый и второй входы фазового детектора (ФД) 26 объединены со входами первого 22 и второго 23 амплитудных детекторов, а выход соединен со входом третьего ФНЧ 27, выход которого является третьим выходом измерителя 18.
Первый 22 и второй 23 амплитудные детекторы могут быть выполнены на основе детекторов типа ZX47 производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Первый 24, второй 25 и третий 27 ФНЧ могут быть выполнены на основе фильтров типа SCLF производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Фазовый детектор 26 может быть выполнен на основе фазовых детекторов типа MPD производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Управление устройствами в каждом i-м приемо-передающем канале ФАР, производится i-м контроллером 13: первым коммутатором 9, вторым коммутатором 12, усилителем мощности 4, первым 3 и вторым 10 аттенюатором осуществляется параллельными кодами. Управление первым 2 и вторым 11 фазовращателями осуществляется аналоговым сигналом с выходов встроенных в контроллер 13 ЦАП. Связь с блоком управления 16 осуществляется по последовательной магистрали CAN через трансивер 14.
Делитель мощности 17 обеспечивает разделение контрольного сигнала с выхода БУ 16 на N выходов. Он может быть выполнен, например, на делителях мощности производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007]. Поскольку фирма выпускает делители с разным числом каналов от 2 до 48, конкретные типы используемых элементов определяются количеством каналов N в АФАР. Если N превышает 48, то необходимо использовать последовательное разветвление входного сигнала для достижения требуемого числа каналов. Реализация многоканальных ДМ на 64 канала описана также в [Проектирование фазированных антенных решетки. Под ред. Д.И.Воскресенского. М.: Радиотехника. 2003, стр.550-551].
Коммутатор 15 обеспечивает коммутацию сигналов с N входов на два выхода. Он может быть выполнен, например, на коммутаторах производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007]. Фирма выпускает коммутаторы с разным числом каналов от 2×1 до 4×1, поэтому коммутатор N×2 будет содержать делители мощности на 2 и коммутаторы. Конкретные типы элементов определяются количеством каналов N в АФАР. При числе каналов N=4 коммутатор 15 может быть реализован на микросхеме HMC596LP4 производства Hittite [Hittite Microwave 2008 Designer′s Guide. 2008. Vol.1-3].
Направленный ответвитель 6 обеспечивает ответвление малой части мощности сигнала на 40-60 дБ меньше основного сигнала и может быть выполнен, например, на основе направленного ответвителя серии BDCA и аттенюатора серии PAT производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Первый 9 и второй 12 коммутаторы предназначены для подключения НО 6 ко входу второго аттенюатора 10 или к выходу делителя мощности 1. Коммутаторы могут быть выполнены на основе коммутаторов серии PSW или HSWA производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Первый 2 и второй 11 фазовращатели и делитель мощности 1 могут быть выполнены на основе фазовращателей серии JSPHS и делителей мощности LRPS производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007], или на основе полосковых фазовращателей [Проектирование фазированных антенных решетки. Под ред. Д.И.Воскресенского. М.: Радиотехника. 2003, стр.532-536].
Усилитель мощности 4 может быть выполнен на усилителях серии ZHL производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Генератор контрольного сигнала 20 может быть выполнен на основе синтезатора частот, формирующего заданную частоту контрольного сигнала серии KSN [Mini-Circuits. IF/RF Components Guide. 2007].
МШУ 8 может быть выполнен в виде последовательно соединенных устройства защиты на основе ограничителя серии PLS производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007] или выполнен по схеме, приведенной в [Гассанов Л.Г., Липатов А.А. и др. Твердотельные устройства СВЧ в технике связи. М.: Радио и связь, 1988, стр.143], и микросхемы малошумящего усилителя, например, из [Hittite Microwave 2008 Designer′s Guide. 2008. Vol.1-3].
Циркулятор 5 может быть выполнен на основе схемы, приведенной в [Гассанов Л.Г., Липатов А.А. и др. Твердотельные устройства СВЧ в технике связи. М.: Радио и связь, 1988, стр.44-45].
Первый 3 и второй 10 аттенюаторы могут быть выполнены на основе цифровых аттенюаторов серии DAT производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007].
Излучатель 7 может быть реализован, например, на основе симметричного вибратора, описанного в [Проектирование фазированных антенных решеток. Под ред. Д.И.Воскресенского. М.: Радиотехника. 2003, стр.532-536].
Устройство, реализующее способ калибровки АФАР, работает следующим образом.
Перед калибровкой во всех каналах в первых 2 и вторых 11 фазовращателях устанавливаются сдвиг фазы 0°, в первых 3 и вторых 10 аттенюаторах устанавливаются затухание 0 дБ. Калибровка приемо-передающего тракта начинается с калибровки приемной части. По умолчанию опорным каналом является первый. БУ 16 устанавливает первый 9 и второй 12 коммутаторы в опорном и калибруемом каналах таким образом, чтобы второй выход делителя мощности 1 был подключен к контрольному выходу НО 6. В БУ 16 контроллер 19 включает генератор контрольного сигнала 20, который формирует контрольный сигнал в виде синусоидального сигнала с фиксированной частотой в пределах рабочего диапазона частот контролируемой АФАР. Контрольный сигнал подается на делитель мощности 17, где разветвляется на N выходов и поступает на входы приемо-передающих каналов АФАР.
В опорном и калибруемом i-том канале контрольный сигнал через делитель мощности 1, второй коммутатор 12, НО 6 и циркулятор 5 поступает на вход МШУ 8, проходит через первый коммутатор 9, второй аттенюатор 10, второй фазовращатель 11 и поступает через коммутатор 15 на измерительные входы БУ 16. Во время прохождения сигнала через приемную часть он приобретает сдвиг по фазе ΔφПРМi и изменяется по амплитуде на ΔAПРМi.
В БУ 16 производится измерение амплитуды контрольного сигнала в опорном канале АПРМ1 с помощью первого амплитудного детектора 22, первого ФНЧ 24 и АЦП, встроенного в контроллер 19. Измерение амплитуды контрольного сигнала в калибруемом канале АПРМi производится с помощью второго амплитудного детектора 23, второго ФНЧ 25 и АЦП, встроенного в контроллер 19. В контроллере 19 определяется разница амплитуд ΔАПРМi=АПРМi-АПРМ0 и округляется до значения шага перестройки второго аттенюатора 10.
Измерение сдвига фаз ΔφПРМi сигналов на выходе калибруемого и опорного каналов производится в БУ 16 с помощью ФД 26, третьего ФНЧ 27 и АЦП, встроенного в контроллер 19. Измеренное значение округляется до шага перестройки второго фазовращателя 11.
Производится установка соответствующих значений затухания во втором аттенюаторе 10 и сдвига фазы во втором фазовращателе 11.
Далее производится калибровка передающей части i-го канала.
Первый 9 и второй 12 коммутатор в опорном и калибруемом каналах устанавливается таким образом, чтобы контрольный выход НО 6 был соединен со входом второго аттенюатора 10. БУ 16 включает на время измерения контрольный сигнал в ГКС 20 и УМ 4 в калибруемом канале. Контрольный сигнал в делителе мощности 17 разветвляется на N каналов и поступает на вход делителя мощности 1. Проходя через первый фазовращатель 2, первый аттенюатор 3, УМ 4, циркулятор 5, НО 6, второй 12 и первый 9 коммутаторы, второй аттенюатор 10 и второй фазовращатель 11, сигнал поступает через коммутатор 15 на измерительные входы БУ 16.
Поскольку вначале была произведена калибровка приемной части канала, то во время прохождения сигнала через передающую и приемную часть он приобретает сдвиг по фазе ΔφПРДi и изменяется по амплитуде на ΔАПРДi, которые определяются только параметрами передающей части канала.
В БУ 16 производится измерение амплитуды контрольного сигнала в опорном канале АПРД1 с помощью первого амплитудного детектора 22, первого ФНЧ 24 и АЦП, встроенного в контроллер 19. Измерение амплитуды контрольного сигнала в калибруемом канале АПРДi производится с помощью второго амплитудного детектора 23, второго ФНЧ 25 и АЦП, встроенного в контроллер 19. Далее определяется разница амплитуд ΔАПРДi=АПРДi-АПРД1 и округляется до значения шага перестройки первого аттенюатора 3.
Измерение сдвига фаз ΔφПРДi сигналов на выходе калибруемого и опорного каналов производится в БУ 16 с помощью ФД 26, третьего ФНЧ 27 и АЦП, встроенного в контроллер 19. Измеренное значение округляется до шага перестройки первого фазовращателя 2.
Производится установка соответствующих значений затухания в первом аттенюаторе 3 и сдвига фазы в первом фазовращателе 2.
Алгоритм работы устройства приведен на фиг.5. Управление и данные из контроллера 19 блока управления 16 передаются в контроллеры 13 через трансиверы 14 приемо-передающих каналов по последовательной магистрали CAN последовательными кодами. При этом каждый контроллер имеет свой адрес в соответствии с номером канала.
После калибровки i-го канала производится калибровка i+1-го канала и так далее до N. Таким образом проводится калибровка всех каналов, а сдвиг фаз и разница амплитуд между ними будет установлена с точностью дискрета регулировки затухания в аттенюаторах 3,10 и дискрета регулировки сдвига фаз в фазовращателях 2 и 11.
Калибровка должна проводиться с периодом повторения Тк, который определяется временем изменения параметров устройств АФАР. Значение Тк зависит от используемой элементной базы, схемного построения и т.д. и определяется на опытном образце изделия.
Алгоритм работы устройства, реализующего предлагаемый способ (фиг.5), включает в себя следующую последовательность операций:
1) устанавливают параметры устройств в исходное состояние: аттенюаторы 3 и 10 в 0 дБ, фазовращатели 2 и 11 в 0°, коммутатор 12 в положение, обеспечивающее соединение контрольного выхода направленного ответвителя (НО) 6 с выходом делителя мощности 1, коммутатор 9 в положение, обеспечивающее соединение выхода МШУ 8 со входом аттенюатора 10, коммутатор 15 в положение, обеспечивающее соединение выходов каналов 1 и i с измерительными входами БУ 16, где i=2;
2) включают ГКС 20 из состава БУ 16, при этом контрольный сигнал через делитель мощности 17 попадает на входы всех каналов, в каждом канале он проходит через делитель мощности 1, коммутатор 12, НО 6 и циркулятор 5, поступает на вход МШУ 8. Со входа МШУ 8 контрольный сигнал через коммутатор 9, аттенюатор 10, фазовращатель 11 и коммутатор 15 поступает на измеритель 18. Измеряют амплитуды АПРМi и АПРМ1, находят разницу ΔАПРМi=АПРМi-АПРМ1, округляют ее до шага изменения аттенюатора 10;
3) измеряют сдвиг фаз между двумя сигналами ΔφПРМi, выключают ГКС 20;
4) устанавливают найденные выше параметры аттенюатора 10 и фазовращателя 11;
5) устанавливают коммутатор 12 в положение, обеспечивающее соединение контрольного выхода НО 6 со входом коммутатора 9, переключают коммутатор 9 в положение, обеспечивающее соединение выхода коммутатора 12 со входом аттенюатора 10;
6) включают ГКС 20 и УМ 4;
7) измеряют амплитуды АПРДi и АПРД1, находят разницу ΔАПРДi=АПРДi-АПРД1, округляют ее до шага изменения аттенюатора 3;
8) измеряют сдвиг фаз между двумя сигналами ΔφПРДi, выключают УМ 4 и ГКС 20;
9) устанавливают найденные выше параметры аттенюатора 3 и фазовращателя 2;
10) повторяют вышеуказанные операции 2)…9) для всех калибруемых каналов (i=3…N, где N - число каналов ФАР).
В результате использования предложенного решения получен следующий технико-экономический эффект: снижены требования к стабильности генератора контрольного сигнала 20 и повышена точность калибровки.
Найдем точность измерения прототипа для обычной относительной нестабильности кварцевых генераторов δυ=5·10-6. При условии проведения измерений всех каналов за Δt=1c нестабильность задержки такого сигнала в начале и конце измерений будет составлять δT=δυ·Δt2/16=3,1·10-7 c, что на частоте, например, fc=1800 МГц будет составлять набег фазы δφ=δT·360°·fC=558°. Таким образом, точность измерения сдвига фаз каналов, измерения которых проводятся в начале и конце калибровки, будет очень низкая.
Поскольку для предлагаемого способа стабильность контрольного сигнала важна только на время измерения данных одного канала Δt1=0,001 c, которое значительно меньше суммарного времени измерения, то нестабильность задержки такого сигнала будет составлять δT=δυ·Δt2/16=3,1·10-13, что на частоте, например, fc=1800 МГц будет составлять набег фазы δφ=δT·360°·fC=0,2°.
Предлагаемый способ имеет более расширенную область и может применяться, в отличие от прототипа, в приемо-передающих АФАР.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для калибровки приемно-передающей активной фазированной антенной решетки | 2016 |
|
RU2647514C2 |
| СПОСОБ КАЛИБРОВКИ МОДУЛЯ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2022 |
|
RU2814484C2 |
| Способ построения активной фазированной антенной решетки | 2019 |
|
RU2717258C1 |
| Приемопередающий модуль активной фазированной антенной решетки СВЧ-диапазона | 2019 |
|
RU2730042C1 |
| Способ построения активной фазированной антенной решётки | 2019 |
|
RU2697194C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2023 |
|
RU2807957C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| Способ построения активной фазированной антенной решетки | 2020 |
|
RU2730120C1 |
| Способ и устройство для калибровки приемной активной фазированной антенной решетки | 2016 |
|
RU2641615C2 |
| СПОСОБ ВСТРОЕННОЙ КАЛИБРОВКИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2014 |
|
RU2568968C1 |

Изобретение относится к антенной технике и предназначено для калибровки активных фазированных антенных решеток. Техническим результатом является расширение области применения и повышение точности калибровки. Способ калибровки активной фазированной антенной решетки, в котором для калибровки приемной части приемо-передающего канала подают контрольный сигнал на вход приемной части каждого канала, измеряют параметры принимаемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые используются для регулировки параметров приемной части канала, для калибровки передающей части приемо-передающего канала подают контрольный сигнал на вход передающей части каждого канала, измеряют параметры передаваемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые далее используются для регулировки параметров канала передающего тракта, калибровка приемной части приемопередающих каналов производится парами в режиме приема, при этом контрольный сигнал снимается с выхода приемной части приемопередающих каналов, калибровка передающей части приемо-передающих каналов производится парами в режиме передачи, при этом для калибровки используют часть мощности сигнала, ответвленного с выхода соответствующего приемо-передающего канала и прошедшего через приемную часть этого канала, в процессе калибровки измеряют сдвиг фазы и разницу амплитуд сигнала с выхода калибруемого канала относительно опорного, в качестве опорного для калибровки всех каналов используется один и тот же канал. 5 ил.
Способ калибровки активной фазированной антенной решетки, в котором для калибровки приемной части приемопередающего канала подают контрольный сигнал на вход приемной части каждого канала, измеряют параметры принимаемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые далее используются для регулировки параметров приемной части канала, для калибровки передающей части приемопередающего канала подают контрольный сигнал на вход передающей части каждого канала, измеряют параметры передаваемого сигнала, формируют на основе измерений корректирующие коэффициенты, которые далее используются для регулировки параметров канала передающего тракта, отличающийся тем, что калибровка приемной части приемопередающих каналов производится парами в режиме приема, при этом контрольный сигнал снимается с выхода приемной части приемопередающих каналов, калибровка передающей части приемопередающих каналов производится парами в режиме передачи, при этом для калибровки используют часть мощности сигнала, ответвленного с выхода соответствующего приемопередающего канала и прошедшего через приемную часть этого канала, в процессе калибровки измеряют сдвиг фазы и разницу амплитуд сигнала с выхода калибруемого канала относительно опорного, в качестве опорного для калибровки всех каналов используется один и тот же канал, например, первый, для калибровки используется синусоидальный сигнал с частотой в рабочем диапазоне частот активной фазированной антенной решетки.
| УСТРОЙСТВО И СПОСОБ КАЛИБРОВКИ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2364029C2 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ | 1995 |
|
RU2147753C1 |
| RU 2004117886 A, 10.08.2005 | |||
| Жидкая фоточувствительная композиция | 1971 |
|
SU452799A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

