Изобретение относится к области геофизики, а более конкретно к устройствам измерения геофизических и гидрофизических параметров в придонной зоне морей и океанов, и может быть использовано при оперативной оценке сейсмического и гидродинамического состояния районов и прогноза возможных сейсмических и экологических последствий катастрофических явлений природного и техногенного характера.
Известные автономные донные станции (патенты RU №2270464, RU №2276388, RU №2294000 [1, 2, 3]) представляют собой цилиндрические или шарообразные корпусы, снабженные балластом для установки их на грунт, внутри и на корпусе которых установлены измерительные датчики и средства обработки первичной информации. В качестве измерительных датчиков используются, как правило, гидрофоны и геофоны. Зарегистрированная датчиками информация хранится на флеш-памяти донной станции, которая после подъема донных станций обрабатывается с помощью комплекса судовой аппаратуры или считывается по каналам гидроакустической связи. Известные донные станции предназначены в основном для регистрации сейсмических сигналов в морских акваториях. Так, устройство [3] представляет собой морскую автономную донную сейсмическую станцию, устанавливаемую на морское дно преимущественно с плавучих средств. Станция включает герметичный корпус, состоящий из двух полусфер, снабженных в месте сочленения уплотнительным кольцом. Внутри размещена геофизическая аппаратура, включающая измерительные датчики геофонного и гидрофонного типов, модули приема, регистрации, преобразования и хранения зарегистрированных сигналов, блоки сопряжения с бортовым модулем после всплытия и подъема устройства на борт, спутниковый и гидроакустический каналы связи, блок ориентации, блок синхронизации, блок управления размыкателем и блок питания. На внешней поверхности корпуса установлены гидроакустическая и спутниковая антенны, средства для поиска донной станции при всплытии, такелажные элементы и разъемы, устройство постановки на дно и обеспечения всплытия донной станции, выполненное в виде якоря-балласта. Технический результат - повышение точности измерений, снижение трудоемкости и изготовления донной станции, упрощение процессов ее постановки на дно и возвращения на борт после окончания работы.
Недостатком известных автономных донных станций является то, что они предназначены для регистрации только сигналов сейсмической природы. В то же время автономные донные станции могут применяться и при решении таких задач, как изучение строения земной коры, исследование совокупности проявления геофизических полей и тектонических разломов непосредственно на дне океана, геофизический мониторинг сложных гидротехнических сооружений.
Известные также подводные обсерватории (патент ЕР №0519031, патент NO №911639, патент EP №0516662, кн.: Средства и методы океанологических исследований. Смирнов Г.В., Еремеев В.Н., Агеев М.Д. и др. - М., Наука, 2005, патент AU №2002100749 от 04.09.2002 [4, 5, 6, 7, 8]) включают донный сейсмометр, гидрофизический модуль, датчик магнитного поля, средства первичной обработки и хранения информации, средства связи с комплексом судовой аппаратуры, установленные на платформе, что позволяет регистрировать более полный спектр геофизических и гидрофизических параметров и, как следствие этого, расширить функциональные возможности донных станций.
Недостатком известных подводных обсерваторий является то, что состав их измерительных средств не позволяет решить задачу, связанную с комплексным исследованием параметров морской среды в придонной зоне, включая тектонические процессы, происходящие под морским дном, а также задачу геофизического мониторинга сложных гидротехнических сооружений.
Выявленных недостатков лишено устройство, представляющее собой подводную обсерваторию (патент RU №2348950 [9]), состоящую из герметичного корпуса, установленного на раме, и содержащую средства регистрации геофизических сигналов, включающие донный сейсмометр, гидрофизический модуль, датчик магнитного поля, блок оптических измерений, средства хранения информации, средства связи с диспетчерской станцией, датчик пространственной ориентации, радиобуй, балласт, размыкатель балласта, дополнительно введены блок гидрохимических измерений, спектроанализатор, сейсмоакустический блок, блок гидроакустического телеуправления, блок контроля радиоактивного загрязнения, блок регистрации и управления, модем кабельной линии связи, в котором блок гидрохимических измерений своими входами соединен с выходами блока контроля радиоактивного загрязнения, спектроанализатора, а своим выходом соединен с входом блока регистрации и управления, который другими выходами соединен с выходами донного сейсмометра, гидрофизического модуля, датчика магнитного поля, блока оптических измерений, модемом кабельной линии связи, а входом-выходом соединен с входом-выходом блока гидроакустического телеуправления.
Отличительные признаки по сравнению с известными устройствами [1-8], заключающиеся в том, что в известное устройство дополнительно введены блок гидрохимических измерений, спектроанализатор, сейсмоакустических блок, блок гидроакустического телеуправления, блок контроля радиоактивного загрязнения, блок регистрации и управления, модем кабельной линии связи, в котором блок гидрохимических измерений своими входами соединен с выходами блока контроля радиоактивного загрязнения, спектроанализатора, а своим выходом соединен с входом блока регистрации и управления, который другими выходами соединен с выходами донного сейсмометра, гидрофизического модуля, датчика магнитного поля, блока оптических измерений, модемом кабельной линии связи, а входом-выходом соединен с входом-выходом блока гидроакустического телеуправления, позволяют решить техническую задачу не только оперативной оценки сейсмического состояния исследуемых районов, но и позволяют решить задачу оперативной оценки гидродинамического состояния на границе вода-грунт, обусловленных изменением окружающей среды под воздействием процессов природного и техногенного характера.
Однако состав измерительных средств данного устройства не позволяет выполнить анализ на содержание метана в водной среде в зонах размещения нефтегазовых трубопроводов при наличии утечек, а также определение координат газового образования. Кроме того, при использовании сейсмических датчиков электромеханического типа возможны нарушения в их работе при наличии ударов при постановке геофизической обсерватории на грунт, а также при отклонении положения сейсмических датчиков от вертикали на угол, больший максимально допустимого. Также ввиду небольшой собственной плавучести и небольшого внутреннего пространства сферы на обсерваторию невозможно установить блоки автономного питания большой емкости и, как следствие, невозможно увеличить срок автономной работы устройства без потери способности самостоятельного всплытия на водную поверхность.
Кроме того, посредством известных устройств решается ограниченной число задач, связанных с обнаружением возможности наступления катастрофических явлений.
В то же время посредством данных устройств, при их усовершенствовании, возможно решение следующих фундаментальных задач, заключающихся в изучении строения земной коры в акваториях мирового океана: исследование совокупности проявления геофизических полей в зонах тектонических разломов непосредственно на дне океана, исследование состояния морской среды в придонной зоне и ее взаимодействие с тектоническими процессами, геофизический мониторинг сложных гидротехнических сооружений, оперативная оценка сейсмического и гидродинамического состояния районов и прогноза возможных сейсмических и экологических последствий, а также при заблаговременном оповещении о землетрясениях и цунами.
Известно, что вследствие тектонических особенностей Земли свыше 80% всех землетрясений происходит под дном морей и океанов (Соловьев С.Л. История и перспективы развития морской сейсмологии. М.: Наука. 1986, с.11. Левин Б.В., Носов М.А. Физика цунами. М.: «Янус-К». 2005, с.152 [10, 11]). При этом сейсмологическая сеть расположена практически полностью на континентах и некоторых островах. Регистрация удаленных сильных морских землетрясений наземными сейсмографами приводит к большим погрешностям в определении магнитуды и координат гипоцентров, слабые морские землетрясения практически не регистрируются. Самые сильные землетрясения с магнитудой 8 и более, вызывающие в основном катастрофические волны цунами, концентрируются под океаническим дном вблизи сейсмически активных континентальных окраин. В России такими районами являются побережье Камчатки, Курильские острова и остров Сахалин. В настоящее время путем долгосрочного сейсмологического прогноза выявлены места ожидаемых сильнейших землетрясений в этом регионе. Это Авачинский залив Камчатки и пролив Буссоль между островами Урупом и Симуширом Южных Курил. Однако время наступления таких землетрясений на основе долгосрочных прогнозов определяется с погрешностью в десятки-сотни лет.
Известные способы и устройства, основанные на использовании глубоководных регистраторов волны цунами, устанавливаются, как правило, вдоль защищаемого побережья. Такие регистраторы производят измерение давления или толщины водного слоя и должны иметь очень высокую чувствительность. Высота волны цунами в открытом океане в 10 см может многократно увеличиваться на мелководье и представлять существенную опасность. Поэтому при постановке на глубину, например, 3 км регистраторы должны иметь чувствительность не меньше 3×10-5.
Такую чувствительность обеспечивают только кварцевые измерители давления. При этом для измерения толщины водного слоя используют донные эхолоты, что необходимо для компенсации погрешности, обусловленной неравномерностью распространения скорости звука в воде.
Имеется также принципиальная возможность обнаружения волн цунами с помощью спутниковых наблюдений [10, 11]. Однако для обеспечения требуемого разрешения по высоте и времени последовательного сканирования земной поверхности не меньше 10-15 минут необходимо запустить на орбиты несколько десятков спутников.
Кроме того, техническая реализация устройств регистрации и обработки сигналов сейсмического происхождения, полученных посредством ИСЗ, для выделения волн цунами на фоне шумов моря, как естественного, так и техногенного происхождения, которые в открытом океане имеют высоту в несколько сантиметров, обусловлена сложной математической обработкой, которая необходима для исключения помех в виде ветровых и приливных волн, а также ветровых нагонов.
При этом зарегистрированные сигналы, в виде синусоидальных колебаний, измеряемого параметра при наложении на них акустических и гидродинамических шумов техногенного характера, могут быть как периодическими, так и апериодическими, что требует получения многочисленных массивов измеряемого параметра для выявления амплитуды, статистически достоверно отличающейся от фоновой, для достижения положительного технического результата.
Кроме того, отрицательное воздействие на достоверность прогноза оказывает появление микросейсмических штормов (резких и относительно кратковременных увеличений уровня микросейсм на дне), вызываемых сильными морскими штормами, придонными течениями и сейсмической активностью как от удаленных землетрясений, так и сейсмоакустическими колебаниями от группы местных землетрясений и сейшевыми колебаниями поверхности воды, возникающими при приливах и вызванных при этом приливных течениях.
При этом на очень низких частотах (ниже 0,01 Гц) вследствие пренебрежительно малой толщины слоя океана по сравнению с длиной волны колебания, вызванные микросейсмами, могут продолжаться несколько часов (10 и более), которые известными устройствами не регистрируются.
Частично выявленные недостатки устраняются при использовании известного устройства (заявка RU №2009116092 [12]).
Известное устройство [12] представляет собой подводную обсерваторию, состоящую из герметичного прочного корпуса, установленного на несущей раме, и содержащую средства регистрации геофизических и гидрофизических данных, включающие сейсмометр, гидрофизический модуль, датчик магнитного поля, средства связи с комплексом судовой аппаратуры, радиобуй, балласт, размыкатель балласта, блок гидрохимических измерений, блок гидроакустического телеуправления, блок регистрации и управления, в котором блок гидрохимических измерений своим выходом соединен с входом блока регистрации и управления, который другими входами соединен с выходами сейсмометра, гидрофизического модуля, датчика магнитного поля, а входом-выходом соединен с входом-выходом блока гидроакустического телеуправления, в которую дополнительно введены датчик обнаружения метана, соединенный своим выходом с блоком регистрации и управления, донный датчик давления, соединенный своим выходом с блоком регистрации и управления, датчик пространственной ориентации, соединенный своим входом-выходом с входом-выходом блока регистрации и управления; сейсмометр состоит из сейсмического модуля и сейсмоакустического модуля. При этом известная подводная обсерватория сочленена с судовым комплексом и устройством типа "Data"-буй, которые используются для обеспечения функционирования подводной обсерватории по прямому назначению. Кроме того, герметичный прочный корпус, установленный на несущей раме, имеет сферическую форму и выполнен из титана с отношением запаса плавучести к полной массе подводной обсерватории 1:1,35, несущая рама снабжена анкерным устройством, на выносной штанге которого установлен сейсмический модуль.
Благодаря новым отличительным признакам, заключающимся в том, что введены датчик обнаружения метана, соединенный своим выходом с блоком регистрации и управления, датчик пространственной ориентации, соединенный своим входом-выходом с входом-выходом блока регистрации и управления; сейсмометр состоит из сейсмического модуля и сейсмоакустического модуля; герметичный корпус сферической формы, установленный на несущей раме, выполнен из титана с отношением запаса плавучести к полной массе подводной обсерватории 1:1,35; несущая рама снабжена анкерным устройством, на выносной штанге которого установлен сейсмический модуль, обеспечивается возможность выполнить анализ на содержание в водной среде метана за счет ввода в состав измерительных средств датчика метана. Ввод в состав измерительных средств донного датчик давления, соединенного своим выходом с блоком регистрации и управления, позволяет с высокой точностью регистрировать изменение уровня моря и тем самым определять приближение и фиксировать прохождение волны цунами. Выполнение сейсмометра из двух модулей расширяет функциональные возможности устройства и повышает надежность проводимых исследований. Выполнение герметичного прочного корпуса из титана с отношением плавучести к полной массе подводной обсерватории 1:1,35 обеспечивает большую положительную плавучесть обсерватории и возможность установки элементов электрического питания повышенной емкости, обеспечение глубоководных исследований. Снабжение несущей рамы анкерным устройством, на выносной штанге которого установлен сейсмический модуль, позволяет регистрировать сейсмические сигналы на границе раздела вода-грунт.
Однако при использовании известных конструкций подводных обсерваторий (в том числе и прототипа) имеется ряд проблем, связанных с влиянием придонных течений на аппаратные шумы, сцеплением их с мягким дном, микросейсмическими шумами, генерируемыми гравитационными волнами, особенностями распространения сейсмических сигналов в коре океанического типа и др. В общем случае придонные течения могут носить как ламинарный, так и турбулентный характер (вследствие наличия неровностей дна). При этом в низкочастотной части диапазона сейсмометра возможно возникновение помех за счет турбулентных явлений на крупных неровностях дна (до 10 м). В связи с этим практически полностью исключается возможность использования сейсмических приемников с инерционной массой на упругой подвеске, несмотря на то, что они имеют высокую чувствительность, широкий динамический и частотный диапазоны.
Также необходимо отметить, что придонные течения, особенно с рельефом дна в виде крутых склонов подводных гор, являются не коррелированными с направлением и скоростью ветра, что не позволяет из результатов наблюдений исключать данные помехи. При этом квазигармонические помехи могут возникать на частотах 1,3 Гц, 3 Гц и 6 Гц и занимать до 40% всего времени регистрации. Причем амплитуды этих помех неустойчивы и могут меняться примерно на 35 дБ.
Задачей предлагаемого технического решения является расширение функциональных возможностей и повышение надежности при эксплуатации донных сейсмических обсерваторий.
Поставленная задача решается за счет того, что подводная обсерватория, сочлененная с судовым комплексом и устройством типа "Data"-буй и состоящая из герметичного прочного корпуса, установленного на несущей раме, и содержащая средства регистрации геофизических и гидрофизических данных, включающие сейсмометр, гидрофизический модуль, датчик магнитного поля, средства связи с комплексом судовой аппаратуры, радиобуй, балласт, размыкатель балласта, блок гидрохимических измерений, блок гидроакустического телеуправления, блок регистрации и управления, в котором блок гидрохимических измерений своим выходом соединен с входом блока регистрации и управления, который другими входами соединен с выходами сейсмометра, гидрофизического модуля, датчика магнитного поля, а входом-выходом соединен с входом-выходом блока гидроакустического телеуправления, дополнительно содержащая датчик обнаружения метана, соединенный своим выходом с блоком регистрации и управления, донный датчик давления, соединенный своим выходом с блоком регистрации и управления, датчик пространственной ориентации, соединенный своим входом-выходом с входом-выходом блока регистрации и управления; сейсмометр состоит из сейсмического модуля и сейсмоакустического модуля, при этом герметичный прочный корпус, установленный на несущей раме, имеет сферическую форму и выполнен из титана с отношением запаса плавучести к полной массе подводной обсерватории 1:1,35, несущая рама снабжена анкерным устройством, на выносной штанге которого установлен сейсмический модуль, отличается тем, что на несущей раме и в корпусе устройства типа "Data"-буй размещены датчики ядерно-магнитного резонанса, соединенные своими выходами с входом блока регистрации и управления, датчик ядерно-магнитного резонанса состоит из самарий-кобальтовых шайб.
Сущность технического решения поясняется чертежами.
Фиг.1. Конструкция подводной обсерватории. Подводная обсерватория состоит из рамы 1, на которой установлен сферический титановый прочный корпус 2, внутри которого установлены аппаратурные блоки. Корпус 2 соединен тросом 3 с размыкателем 4, который соединен якорным канатом 5 с якорем 6. На верхней части рамы 1 установлен выносной блок 7, в котором размещены устройства, предназначенные для сочленения подводной обсерватории с судовым комплексом. На верхней части рамы 1 также установлены гидрофизический модуль 8, узлы и элементы спутникового 9 и гидроакустического 10 каналов связи. Рама 1 сочленена с анкерным устройством 11, на котором закреплен донный сейсмометр 12, в рабочем положении, размещаемый посредством анкерного устройства 11 на морском дне 13.
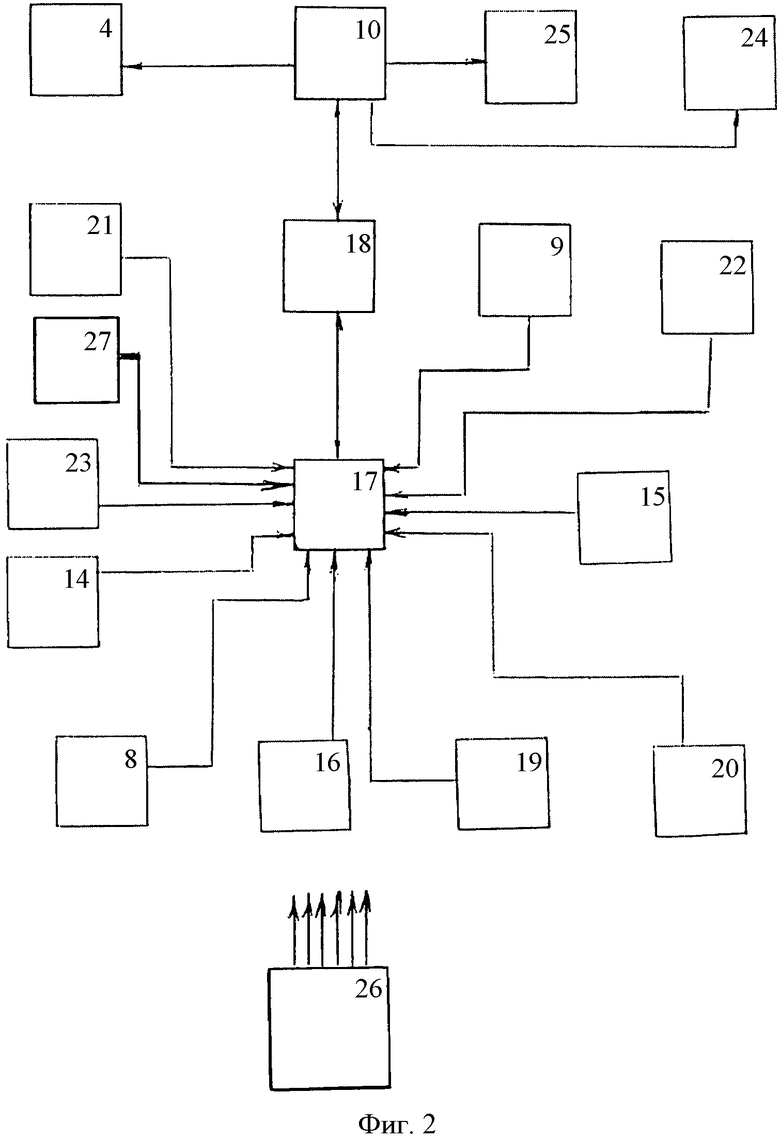
Фиг.2. Блок-схема подводной обсерватории. Блок-схема подводной обсерватории включает: сейсмический модуль 14, сейсмоакустический модуль 15, гидрофизический модуль 8, спутниковый канал связи 9, датчик магнитного поля 16, блок регистрации и управления 17, модемы 18 гидроакустического канала связи 10, блок пространственной ориентации 19, гидроакустический размыкатель 4, акустический доплеровский измеритель профиля течений 20, блок гидрохимических измерений 21, датчик метана 22, донный датчик давления 23, радиомаяк 24, проблесковый маяк 25, блок питания 26, датчик ядерно-магнитного резонанса 27.
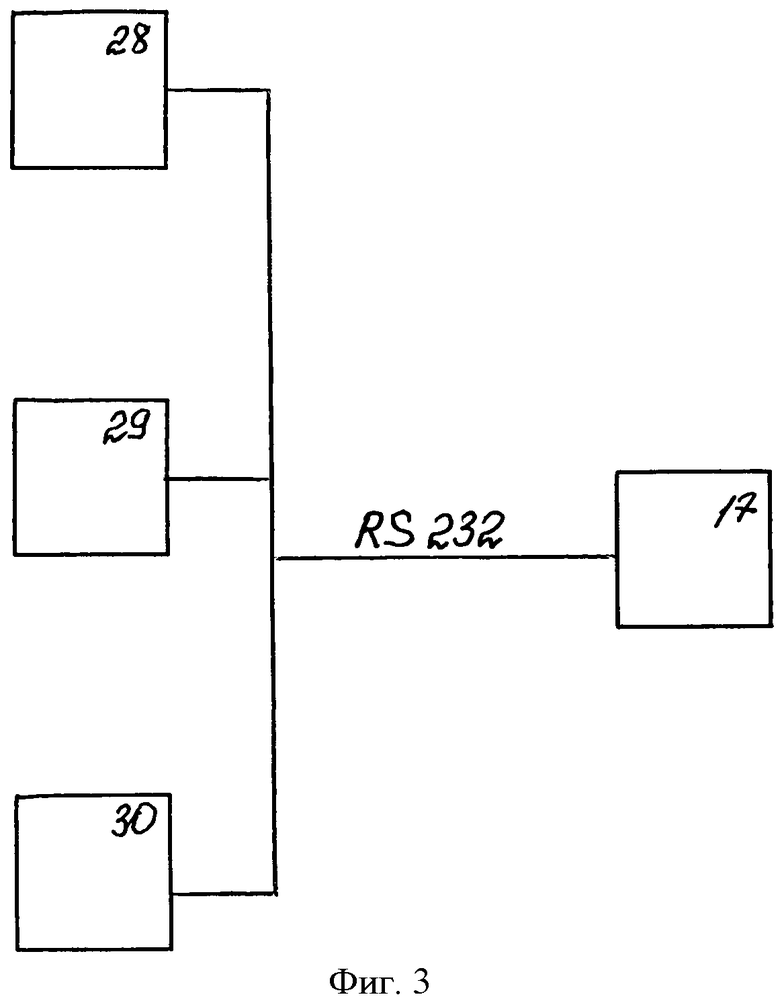
Фиг.3. Блок-схема гидрофизического модуля 8. Блок-схема гидрофизического модуля 8 включает датчик скорости течения 28, датчик электрической проводимости 29, датчик давления 30.
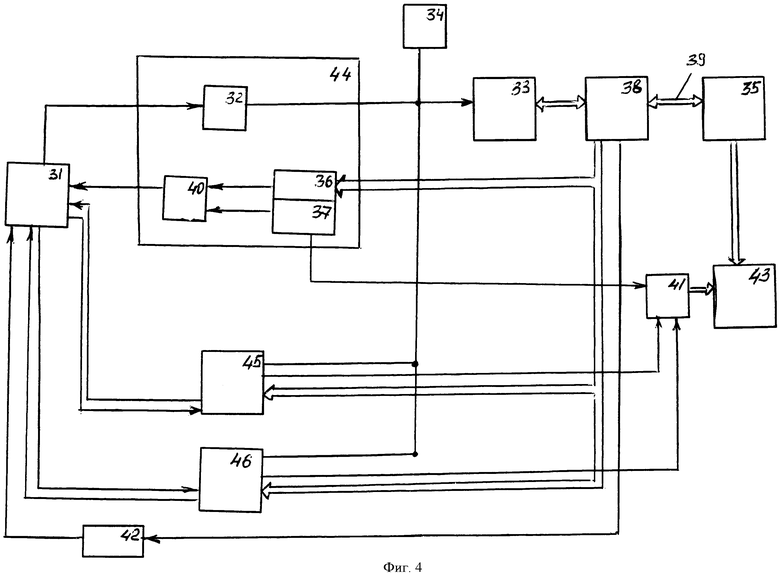
Фиг.4. Блок-схема датчика магнитного поля 16. Блок-схема датчика магнитного поля 16 включает феррозондовый датчик 31, фазовый чувствительный усилитель 32 ключевого типа, трехканальный АЦП 33, температурный датчик 34, выходной порт 35, ЦАП 36, 37, микроконтроллер 38, интерфейс 39, преобразователь 40 напряжение-ток, фильтр низких частот 41, обмотку компенсации 42, микрокомпьютер 43. Фазовый чувствительный усилитель 32, ЦАП 36, 37 и преобразователь 40 напряжение-ток образуют канал обработки сигналов по горизонтальной составляющей магнитного поля 44. Аналогичные элементы образуют каналы 45 и 46, предназначенные для обработки сигналов по продольной и вертикальной составляющей магнитного поля соответственно.
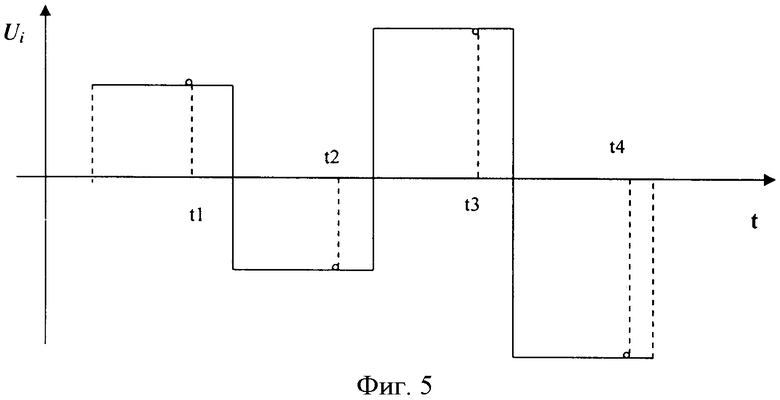
Фиг.5. Вид входного напряжения на АЦП 33.
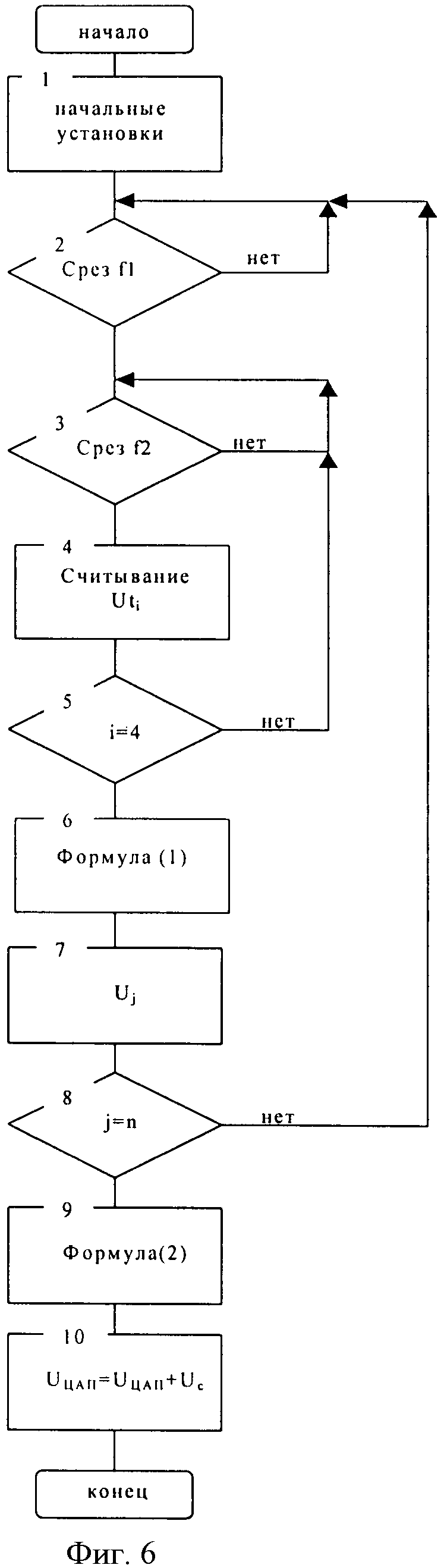
Фиг.6. Алгоритм обработки данных при получении одного значения магнитного поля.
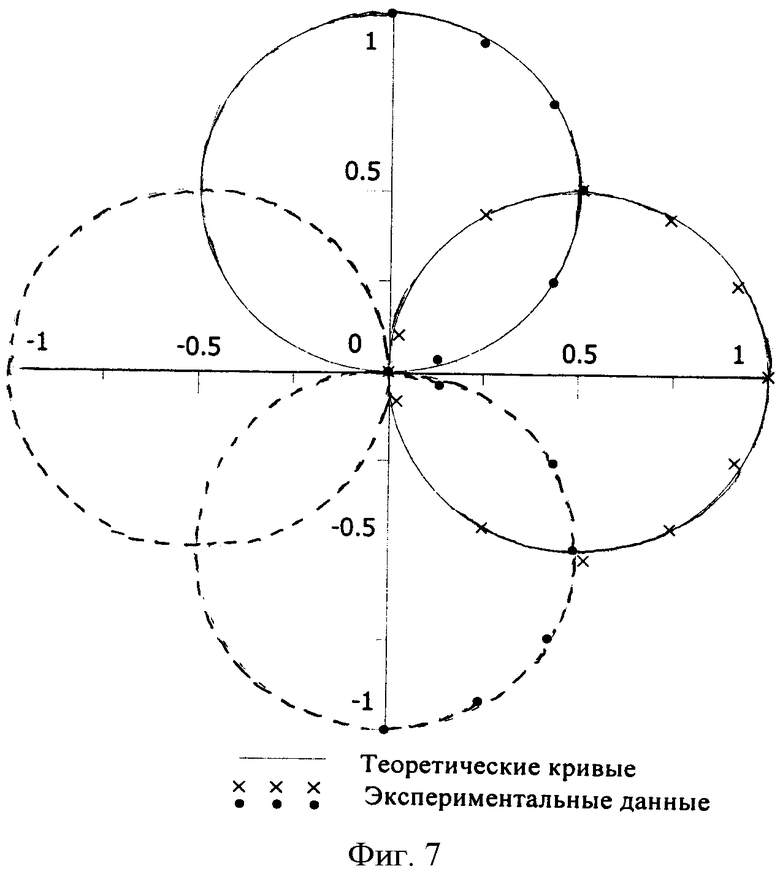
Фиг.7. Диаграмма направленности горизонтальных компонент трехкомпонентного векторного сейсмометра.
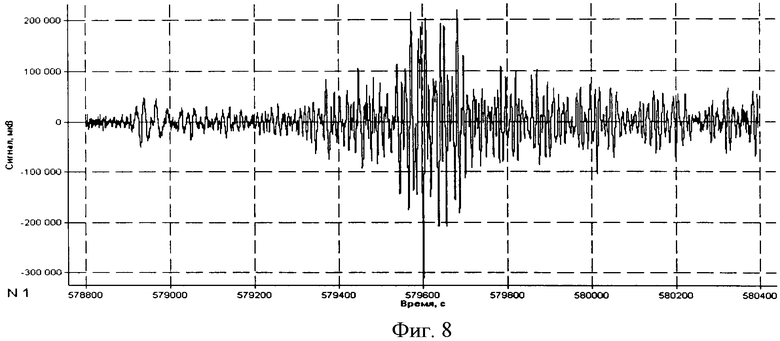
Фиг.8. Фрагмент записи Сычуаньского землетрясения.
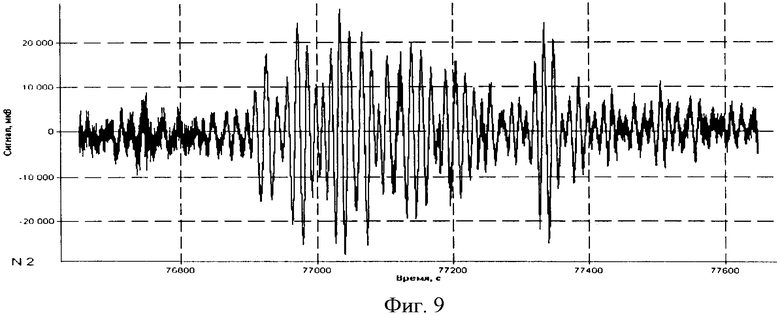
Фиг.9. Фрагмент записи землетрясения на острове Хонсю.
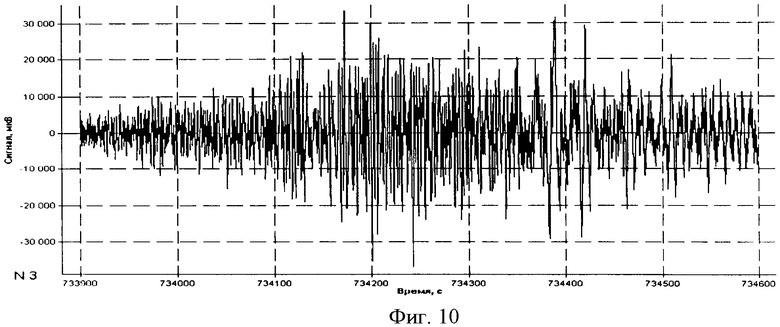
Фиг.10. Фрагмент записи землетрясения на юге озера Байкал.
Рама 1 представляет собой металлическую конструкцию и является несущей платформой подводной обсерватории.
Блок питания 26 предназначен для обеспечения возможности длительной автономной работы устройства.
Герметичный прочный корпус 2 изготовлен шарообразной формы. Внутри корпуса установлены блок питания повышенной емкости, блок регистрации и управления, блок гидроакустической связи, измерительная аппаратура.
Блок регистрации и управления 17 предназначен для сбора информации от датчиков подводной обсерватории, привязки ее к системе точного времени, для сжатия и записи информации на флеш-память в автономном режиме.
Подводная обсерватория предназначена для:
- изучения строения земной коры в акваториях Мирового океана;
- исследования совокупности проявления геофизических полей в зонах тектонических разломов непосредственно на дне океана;
- исследования состояния морской среды в придонной зоне и ее взаимодействие с тектоническими процессами;
- геофизического и геоэкологического мониторинга сложных гидротехнических сооружений;
- оперативной оценки сейсмического и гидродинамического состояния районов и прогноза возможных сейсмических и экологических последствий;
- раннего оповещения с существенным повышением точности прогноза землетрясений и цунами;
- выявления предвестников сейсмических, геодеформационных, геохимических, гидрофизических предвестников катастрофических землетрясений, очаги которых находятся под дном океана, осуществление среднесрочного и краткосрочного прогноза землетрясений с магнитудой 5,5 и выше;
- контроля изменений напряженно-деформированного состояния участков земной коры шельфовых зон вблизи разрабатываемых месторождений нефти и газа, вызванных извлечением углеводородов, законтурной закачкой воды и другими искусственными воздействиями на углеводородный пласт;
- выбора экологически безопасных режимов эксплуатации месторождений;
- прогноза развития деформаций земной коры и наведенной сейсмичности;
- прогноза небольших местных землетрясений, опасных повреждением скважин, нефтяных платформ/подводных трубопроводов;
- исследования месторождений морских газогидратов.
Применение предлагаемой подводной геофизической обсерватории позволит проводить научные исследования в придонной области океана на новом качественном уровне, дающем возможность не только регистрировать геофизические, гидрохимические, гидрофизические и гидроакустические параметры, но и оценивать взаимосвязи между этими параметрами, а также выявлять сейсмических, геодеформационных, геохимических, гидрофизических предвестников катастрофических землетрясений, очаги которых находятся под дном океана, и тем самым существенно повысить точность прогноза землетрясений и цунами.
Кроме того, применение предлагаемой конструкции подводной обсерватории позволит также осуществлять контроль изменений напряженно-деформированного состояния участков земной коры шельфовых зон вблизи разрабатываемых месторождений нефти и газа, вызванных извлечением углеводородов, законтурной закачкой воды и другими искусственными воздействиями на углеводородный пласт, прогнозировать небольшие местные землетрясения, опасные повреждением скважин, нефтяных платформ/подводных трубопроводов, прогнозировать аварийные ситуации, тем самым способствовать снижению экологической опасности при эксплуатации морских промышленных объектов.
Подводная обсерватория представляет собой погружаемый комплекс измерительной аппаратуры (фиг.1), сочлененный с судовым комплексом и устройством типа "Data"-буй, которые используются для обеспечения функционирования подводной обсерватории по прямому назначению.
Погружаемый гидрофизический комплекс (ПГК) выполняет следующие функции: постановку на дно и подъем аппаратуры; работу аппаратуры на глубинах до 6000 м; тестирование и диагностику положения ПГК на дне; измерение и преобразование параметров геофизических и гидрофизических полей в электрические сигналы с помощью соответствующих датчиков. ПГК выполняет усиление и фильтрацию сигналов от датчиков; аналого-цифровое преобразование входных сигналов; привязку полученной информации к сигналам точного времени; цифровую обработку сигналов и накопление информации; передачу зарегистрированной и обработанной информации по гидроакустической линии связи; обеспечивает прием и передачу служебных гидроакустических сигналов и устройств поиска ПГК на поверхности после всплытия. Цифровые геофизические каналы сообщаются с блоком регистрации и управления 17 через последовательный порт RS-232 в соответствии с протоколами обмена. Аналоговые геофизические каналы имеют значения выходных напряжений в диапазоне от -10 В до +10 В.
Каждый геофизический измерительный канал питается от первичного источника постоянного тока напряжением 12 В.
Конструкция подводной обсерватории представляет собой сферический прочный корпус 1 (фиг.1), выполненный из титана диаметром 950 мм, имеющий вес на воздухе 264 кг и обеспечивающий плавучесть в воде 195 кг, с рабочей глубиной 6000 м. Внутри корпуса устанавливаются основные аппаратурные блоки.
На внешней раме 1 размещаются модули измерительных приборов и устройств, соединяемые между собой кабелями с герметичными разъемами. Подводная обсерватория устанавливается на дно в заякоренном состоянии в 3÷5 м от дна. К нижней части несущей рамы 1 подвешивается автономный гидроакустический размыкатель 4, обеспечивающий отсоединение якоря 6 при подъеме погружаемого комплекса на поверхность.
Гидрофизический модуль 8 состоит из двух основных компонент: акустического трехкомпонентного измерителя течений типа 3D-ACM модель 3ACM-CBP-S и измерителя электропроводности с датчиком температуры, выполненного на основе измерителя скорости течения типа CTS-C-1ED.
Датчик скорости течения 28 представляет собой акустический измеритель течения и измеряет три компоненты скорости течения на одном горизонте и включает в себя трехкомпонентный магнитный компас для измерения магнитного поля Земли в трех проекциях, двухосевой электролитический инклинометр для измерения отклонения от вертикали, твердотельный датчик температуры. Принцип измерения скорости течения основан на измерении разности времен пролета акустического импульса в прямом и обратном направлении («времяпролетный» измеритель). Он может быть также оснащен датчиком давления для измерения глубины постановки датчика скорости течения 28. Он также имеет интерфейс для подключения датчика солености и температуры и два входных канала постоянного тока для подключения внешних датчиков. Результаты измерений передаются в реальном времени в формате ASCII по последовательному интерфейсу RS-232 или RS-485 при скорости 19200 бит/сек, либо записываются в стандартное статическое ОЗУ размером 0,5 МБ, питаемое литиевой батареей, для последующего считывания. Он имеет глубину постановки до 7000 м и вариант «прибрежной» постановки до 1000 м глубины (в зависимости от конструктивного исполнения корпуса и диапазона измерения датчика давления).
Программное обеспечение (программа 3DACM97) позволяет конфигурировать и настраивать датчик с использованием стандартного пользовательского интерфейса Windows. Данные могут передаваться в режиме реального времени или считываться из внутренней памяти прибора. Данные, передаваемые в режиме реального времени, могут быть представлены в графическом виде на экране дисплея. Программное обеспечение в режиме реального времени принимает и сохраняет данные о векторе скорости, данные с трехкомпонентного компаса, инклинометра, данные с дополнительных датчиков, включая датчик солености, температуры, давления.
Данные о векторе скорости и показания инклинометра усредняются с помощью алгоритма векторного осреднения по временному интервалу от 15 секунд до 60 минут. Программа ACMPost позволяет графически отображать прочитанные данные на дисплее и сохранять данные по измерениям солености, температуры, давления в файле стандарта DAT С00 и HDR. Эти форматы также могут читаться программой ACMPost.
Электронный интерфейс обеспечивает выход напряжения постоянного тока пропорционально электропроводности и температуре. Управление выходом напряжения достигается посредством двух управляемых пользователем логических линий. Датчики электропроводности основаны на датчике электропроводности с индуктивной связью. Индуктивные датчики демонстрируют естественную устойчивость, в отличие от датчиков, основанных на незащищенных электродах, при изменении их геометрии, которая вызывается биообрастанием. Большой внутренний диаметр датчика электропроводности устраняет необходимость в насосе или других искусственных средствах проведения потока воды через датчик. Использование высококачественного платинового термометра сопротивления приводит к линейным измерениям температуры, характеризуемым высокой стабильностью. Электронный сигнал очень линеен, что устраняет необходимость использования комплексных уравнений для преобразования выходных сигналов в физические величины.
Коммуникационный протокол модуля включает в себя развитую систему команд, позволяющую организовать работу с модулем наиболее удобным для пользователя образом.
Модуль может работать в одном из четырех режимов:
- режим RUN MODE (normal).
В этом режиме модуль осуществляет измерения всех параметров:
- режим RUN MODE (fast pressure).
В этом режиме измерения осуществляются только для датчика давления и передается значение только величины давления.
Режимы OPEN MODE (изменение констант калибровки) и CAL MODE (проведение калибровки) являются вспомогательными и используются при проведении метрологического обслуживания прибора. Измеренные величины автоматически пересчитываются в физические значения и в таком виде (в ASCII-кодах) передаются пользователю, а также записываются в память, откуда могут быть считаны позднее в произвольный момент времени.
Блок пространственной ориентации 19 представляет собой датчик пространственной ориентации и предназначен для использования в составе сейсмического модуля (СМ) для определения точного положения в пространстве сейсмического модуля 14 и сейсмоакустического модуля 15.
В качестве датчика блока пространственной ориентации 19 используется модуль электронного компаса типа ТСМ 2.50, который представляет собой трехосевой курсовой компас с компенсатором наклона, конструктивно выполненный на одной плате с блоком электроники. Компас оснащен системой электронной компенсации, которая позволяет производить точные вычисления азимута, бортового наклона (крена) и килевого наклона (тангажа) при угловых положениях ±50 градусов.
Блок регистрации и управления 17 предназначен для синхронной оцифровки и регистрации сигналов от сейсмических и иных датчиков различного типа. Оцифровка сигналов производится с помощью 8-канального дельта-сигма АЦП с разрешением в 24 бита. Он имеет энергонезависимую память объемом 16 Гб, а также дополнительную энергонезависимую память для хранения служебной информации и данных калибровки времени с частотой квантования 100 Гц, емкостью памяти 16 Гб и продолжительностью непрерывной записи 160 суток.
Подготовка блока регистрации и управления 17 к работе, а именно: проверка работоспособности, наличия необходимых сигналов, очистка и проверка памяти, установка и проверка внутренних часов реального времени - производится посредством судового комплекса через последовательный интерфейс типа RS-232. Считывание зарегистрированных данных производится с помощью специального дополнительного устройства по интерфейсу USB.
Конструктивно блок регистрации и управления 17 состоит из двух контейнеров. Один из них содержит плату регистратора, плату памяти и платы электрических согласований и предварительной аналоговой обработки сигналов. Плата памяти оформлена в виде защищенного модуля, снабженного специальной скобой для удобства ее извлечения из контейнера и установки в устройство считывания информации. Другой контейнер служит для размещения стабилизированного по температуре кварцевого генератора типа «МАРИОН» и устройства считывания данных по шине USB.
Точная временная привязка измерений основана на использовании стабилизированного по температуре кварцевого генератора совместно с имитацией спутниковым источником сигналов точного времени и временной привязки по GPS. В контроллере программно организован 6-байтный счетчик, который в непрерывном режиме производит подсчет импульсов опорного кварцевого генератора с предварительным делителем частоты. Предварительный делитель выбран таким образом, что время переполнения счетчика составляет примерно 1 год при разрешении порядка 0,01 мс.
Перед постановкой погружаемого модуля контроллер блока регистрации и управления подключается к спутниковому навигационному приемнику, имеющему выход сигнала PPS. По команде оператора с помощью специального программного обеспечения (программа FAST_PGK.exe) производится обнаружение положительного фронта сигнала PPS, после чего сразу производится фиксация накопленного значения счетчика. Далее из спутникового навигационного приемника читается сообщение об астрономическом времени, соответствующем фронту PPS. Данные счетчика и соответствующее сообщение о времени заносятся в служебную энергонезависимую память. Эта информация дополняется сообщением о дате момента калибровки, которое берется из часов реального времени, расположенных на плате контроллера. В ходе измерений и регистрации сигналов после приема первого 8-канального отсчета на странице памяти производится фиксация и регистрация значения счетчика. Каждая страница памяти содержит 87 восьмиканальных 3-байтных отсчетов. Таким образом, один раз на 87 отсчетов производится регистрация временной метки. После завершения процесса регистрации процедура временной привязки повторяется. Временную привязку можно производить произвольное число раз в пределах разумного, но достаточно по одному разу перед началом измерений и после их окончания.
Ввод зарегистрированных данных в судовой компьютер после завершения процесса регистрации сигналов выполняется путем извлечения из контейнера платы памяти, размещенной в прочном корпусе погружаемого модуля после его всплытия, и вставляется в устройство считывания. Перекачка данных осуществляется блоками, по 64 страницы за один цикл. Для запуска процесса перекачки данных достаточно указать количество перекачиваемых блоков памяти (количество страниц, деленное на 64) и выбрать имя файла без расширения с помощью программы READER.exe. В процессе перекачки производится точное копирование памяти блока регистрации и управления в файл, без анализа содержания, при этом «плохие» блоки также копируются.
Блок регистрации и управления 17 имеет два режима работы - быстрый старт и работу по часам. В первом случае после нажатия кнопки "START" прибор сразу начинает регистрацию сигналов, во втором случае прибор ждет, пока не сработает заранее установленный будильник часов реального времени, после чего начинает регистрацию. Остановка регистрации в этом режиме производится либо вручную, либо по повторному срабатыванию заранее установленного таймера.
Датчик магнитного поля 16 (фиг.4) изготовлен на базе чувствительного элемента феррозондового магнитометра типа LEMI-018B и предназначен для измерения 3 компонент индукции магнитного поля Земли и их вариаций, а также температуры. В состав датчика магнитного поля входят: блок сенсоров, в котором находятся первичные измерительные преобразователи магнитного поля, и блок электроники, который имеет встроенный термометр для измерения температуры внутри блока. Блок электроники и блок датчиков размещены в прочных корпусах и соединены специальным кабелем. Феррозондовый магнитометр является полностью автономным автоматическим прибором, управляемым микропроцессорной системой, построенной на базе микроконтроллера. Микроконтроллер 38 руководит работой магнитометра и передает данные о магнитном поле и температуре по UART порту. Магнитное поле измеряется феррозондовым датчиком 31, который располагается на расстоянии от 1 м и более от блока электроники. Феррозондовый датчик 31 и блок электроники соединены между собой специальным тестовым кабелем.
Феррозондовый датчик 31 возбуждается напряжением возбуждения с частотой f1=5236 Гц. Выходные сигналы датчика усиливаются и фильтруются с помощью фазовых чувствительных усилителей (ФЧУ) 32 ключевого типа. На их выходах формируется сигнал с частотой второй гармоники напряжения возбуждения f2=10472 Гц. Отфильтрованный сигнал поступает с выхода каждого ФЧУ на один из каналов трехканального аналого-цифрового преобразователя АЦП 33.
Программа обработки и оцифровки данных на примере одного канала магнитометра показана на фиг.5, на которой изображен сигнал, поступающий на вход АЦП 33, а также показаны моменты времени, в которые производится считывание амплитуды сигналов. Для вычисления одного значения магнитного поля используется формула (1).

Вычисление измеряемых значений UJ по такой формуле устраняет влияние температурного смещения нуля избирательного усилителя, а также АЦП 33. Далее производится усреднение измеряемых n раз значений Uj (j=1…n) за период времени, кратный 20 мс (период частоты 50 Гц). Это позволяет уменьшить шумы по цепи входного сигнала, а также значительно ослабить влияние сети частотой 50 Гц. Выделение усредненной за этот период величины измеряемого сигнала Uc выполняется по формуле (2).
Ввиду большого значения n полученное среднее значение Uс по каждому каналу весьма устойчиво к случайным сбоям и используется для создания сигнала компенсации с помощью цифроаналоговых преобразователей ЦАП 36 и ЦАП 37, которые далее суммируются и преобразуются в ток компенсации с помощью блока преобразователя напряжение-ток (U/I). Этот ток подается в обмотку компенсации Wс, создавая с ее помощью магнитное поле в объеме датчика, равное и противоположное по направлению измеряемому полю. Выходное напряжение тех же ЦАП 36 и 37 после прохождения через фильтр низких частот второго порядка с частотой среза 0,5 Гц (на схеме не показан) поступает на аналоговый выход магнитометра.
Коды, которые установились на ЦАП 36 и ЦАП 37 после завершения процесса компенсации, пропорциональны измеряемым значениям магнитного поля. Они далее поступают через управляющий микроконтроллер 38 и UART/RS-232 преобразователь 40 в микрокомпьютер 43, посредством которого визуализируются зарегистрированные данные, которые также записываются в файл на жестком диске.
На фиг.6 приведен алгоритм получения одного значения на выходе магнитометра.
Алгоритм выполняется в такой последовательности:
1. Начальные установки. Коммутируется необходимый магнитный канал, обнуляются рабочие регистры микроконтроллера, i=1, выбирается n из условия Т=20 мс.
2. Синхронизация по срезу импульса частоты возбуждения f1 магнитометра. Синхронизация по срезу импульса второй гармоники частоты возбуждения магнитометра f2.
Считывание с АЦП i-го значения напряжения.
Повторяем пункты 3, 4, 5 до получения i=4.
Накопление данных и вычисление Uj по формуле (1).
Запоминание Uj.
Проверка того, что j=n, если нет, повторяем пункты с 2 по 8, если да, идем дальше.
По окончании цикла 20 мс вычисляем среднее значение Uc по формуле (2).
Проводим коррекцию значения ЦАП.
После включения магнитометра его АЦП 33 находится в насыщении и реализуется алгоритм начальной компенсации с линейно возрастающим сигналом на выходах ЦАП 36, что обеспечивает достаточно эффективный по скорости алгоритм компенсации, при котором разность между компенсирующим и измеренным полем будет постоянно уменьшаться. Если эта разность уменьшится до величины, меньшей ±2 нТл, АЦП 33 выйдет из насыщения и алгоритм компенсации изменится: необходимое значение компенсирующего сигнала вычисляется микропроцессором 42 по показаниям АЦП 33 и корректирует значение кода компенсации ЦАП 36. После этого включается другой компенсационный алгоритм, при котором значение кода ЦАП 36 остается неизменным (он осуществляет грубую компенсацию данной составляющей магнитного поля), а корректируется лишь код компенсации ЦАП 37 по показаниям АЦП 33. При максимальном значении измеряемого поля ±60000 нТл цена 1 бита ЦАП 36 составляет 1,8 нТл, а цена 1 бита ЦАП 37 - 0,01 нТл.
Выходное показание магнитометра для каждого из каналов представляется в виде 32-разрядного кода, который состоит из 16 разрядов, снимаемых с ЦАП 36, и 16 разрядов, которые снимаются с ЦАП 37 (выходные коды этих ЦАП перекрывают друг друга). Возбуждение феррозондового датчика осуществляется специальной цепью возбуждения, создающей сигнал с минимальным содержанием второй гармоники. Параллельно напряжения с выходов ЦАП 36 и ЦАП 37, пропорциональные значениям измеряемых компонент индукции магнитного поля, после суммирования и фильтрации поступают на аналоговые выходы магнитометра.
При временном исчезновении питания или при сбое микроконтроллера инициируется автоматический перезапуск системы. После перезапуска магнитометр входит в рабочий режим, происходит компенсация внешнего магнитного поля и запись продолжается без вмешательства оператора.
Аппаратура гидроакустического канала 10 связи (ГАКС) предназначена для обеспечения морских геофизических исследований с помощью донных станций или подводных геофизических обсерваторий (ПГО), объединенных в измерительную сеть. По характеру обмена сигналами аппаратура гидроакустического канала связи представляет собой аппаратно-программный комплекс, который по функциональным признакам можно разделить на следующие составные части:
- донные модули ГАКС (ДМ-ГАКС) по числу донных станций, объединенных в измерительную сеть, но не более 15 модулей;
- судовая приемно-обрабатывающая аппаратура (СПОА), которая включает в себя судовую ЭВМ со специальным программным обеспечением "GALS" и бортовой модуль ГАКС (БМ-ГАКС);
- модули ГАКС ретрансляционных поверхностных буев (РМ-ГАКС).
Судовая приемно-обрабатывающая аппаратура предназначена для:
- передачи на донные модули аппаратуры ГАКС команд управления;
- приема от донных модулей аппаратуры ГАКС квитанций о приеме и исполнении ПГО команд управления;
- приема от донных модулей аппаратуры ГАКС цифровой телеметрической информации;
- измерения наклонного расстояния до ПГО и на этой основе слежения за подводной геофизической обсерваторией в процессе ее постановки и подъема;
- отображения на мониторе и регистрации на машинном носителе протокола обмена сигналами с ПГО;
- отображения на мониторе и регистрации на машинном носителе принимаемой из ПГО цифровой телеметрической информации.
Модули ГАКС ретрансляционных буев подключаются к радиомодему и обеспечивают по гидроакустическому каналу связи:
- передачу на донные модули аппаратуры ГАКС команд управления;
- прием от донных модулей аппаратуры ГАКС квитанций о приеме и исполнении на ПГО команд управления;
- прием от донных модулей аппаратуры ГАКС цифровой телеметрической информации.
Донные модули ГАКС устанавливаются в корпусе ПГО, через них осуществляется управление устройствами обсерватории и считывание цифровой телеметрической информации о зарегистрированных событиях. Донные модули ГАКС обеспечивают:
- прием от СПОА и РМ-ГАКС команд управления;
- передачу на СПОА и РМ-ГАКС квитанций о приеме и исполнении на ПГО команд управления;
- передачу на СПОА и РМ-ГАКС по запросу цифровой телеметрической информации;
- переход по команде в режим гидроакустического маяка;
- передачу на СПОА и РМ-ГАКС информации о зарегистрированном событии (в этот режим ДМ-ГАКС переводится по факту регистрации ПГО некоторого события без получения команды управления сверху).
Передача сигналов управления и цифровой информации в аппаратуре осуществляется на одной общей для всех ДМ-ГАКС рабочей частоте F=17,96 Гц методом относительной фазовой модуляции (ОФМ) со скоростью модуляции V=560 Бод.
Разделение сигналов между ПГО осуществляется кодовыми методами. Для этого всем ПГО, объединенным в сеть, могут присваиваться порядковые номера, "адреса ПГО", с 1 по 15, которые передаются в составе сигнала команды управления.
Прием сигнала команды управления осуществляется тем ДМ-ГАКС, адрес которого соответствует адресу, передаваемому в составе сигнала; другие донные модули ГАКС (с другими адресами) на данный сигнал команды управления "не реагируют".
В составе сигнала команды управления помимо адреса вызываемой ПГО передается номер команды управления, подлежащей исполнению на ПГО.
Количество команд управления, передаваемых на каждую из ПГО сети, - 31.
Команды управления на ПГО могут передаваться из судовой приемо-обрабатывающей аппаратуры либо из ретрансляционного буя.
Спустя 300 мс после приема команды из ДМ-ГАКС на поверхность передается квитанция о приеме и исполнении на ПГО принятой команды управления.
В составе сигнала квитанции передаются: адрес подводной обсерватории, номер принятой ею команды управления и признак исполнения или неисполнения устройствами ПГО принятой команды управления. Команда управления считается неисполненной, если в течение 300 мс после приема команды управления от устройств ПГО в ДМ-ГАКС не поступит соответствующий сигнал подтверждения ее исполнения.
Структура сигналов квитанций схожа со структурой сигнала команд управления. В обоих случаях для повышения помехозащищенности приема сигналов управления применяется 6-кратная повторная передача пронумерованных кодовых комбинаций самосинхронизирующегося кода (64,15), обнаруживающего ошибки.
Вероятность приема на ПГО команды управления с необнаруженной ошибкой, а также приема на ПГО команды управления в отсутствие ее передачи (набор команды управления из шумов) - не более 10-9.
Вероятность приема РМ-ГАКС или СПОА квитанции с необнаруженной ошибкой, а также приема квитанции в отсутствие ее передачи не превышает 10-9.
Вероятность прохождения сигнала по кольцу управления: команда управления от СПОА (РМ-ГАКС) до ПГО и квитанция от ПГО до СПОА (РМ-ГАКС) при однократной передаче команды управления - не меньше 0,95.
Любой обмен сигналами управления между СПОА и ДМ-ГАКС сопровождается определением расчетным путем наклонной дальности между гидроакустическими антеннами БМ-ГАКС и ДМ-ГАКС на основе измерения времени распространения акустического сигнала между ними. Аппаратная погрешность измерения времени распространения акустического сигнала не превышает 1 мс.
Передача цифровой информации из ПГО представляет собой один из режимов ее работы, в который ПГО переводится при получении от ДМ-ГАКС соответствующей команды управления.
Для управления передачей цифровой информации из ПГО зарезервировано 5 команд управления; список команд управления, применяемых в аппаратуре ГАКС, приведен в таблице 1.
Передача цифровой телеметрической информации из ПГО производится блоками 256 байт.
Для повышения достоверности передачи цифровой телеметрической информации в аппаратуре применяется избыточное кодирование циклическим кодом (2072, 2048) в сочетании с принципом повторной передачи по автозапросу информационных блоков с обнаруженными ошибками.
Вероятность выдачи получателю из СПОА или РМ-ГАКС цифровой телеметрической информации с необнаруженной ошибкой - не более 10-4 на бит.
Структура сигнала, передаваемого из ДМ-ГАКС на поверхность, об обнаружении на ПГО события аналогична структуре сигнала квитанции; в составе сигнала передается адрес подводной обсерватории и признак обнаруженного на ней события.
Структура сигнала маяка также соответствует структуре сигнала квитанции; в составе сигнала маяка передается только адрес подводной обсерватории.
РМ-ГАКС является упрощенным аналогом БМ-ГАКС. Его функции ограничиваются приемом и ретрансляцией в радиомодем сообщения об обнаружении ПГО события, а также прием и ретрансляция в радиомодем цифровой информации, принимаемой от ПГО. Управление передачей цифровой информации из ПГО осуществляется дистанционно по радиомодему.
Обмен сигналами между ДМ-ГАКС и устройствами ПГО, между РМ-ГАКС и радиомодемом в ретрансляционном буе осуществляется в последовательном виде старт-стопными комбинациями на скорости 14400 Бод.
Измерение сейсмических сигналов в ПГО производится с помощью сейсмического модуля (СМ). Сейсмический модуль 14 функционально объединен с сейсмоакустическим модулем (САМ) 15 для компактности и обеспечения проведения измерений одновременно несколькими датчиками различных конструкций, что приводит к повышению точности и надежности проводимых измерений.
СМ 14 предназначен для обеспечения непрерывного сейсмического мониторинга морского дна в широком частотном диапазоне.
СМ 14 включает в себя датчики:
электрохимический велосиметр типа СМЕ-3011-3, представляющий собой трехкомпонентный сейсмический датчик, предназначенный для регистрации сейсмических колебаний донной поверхности вдоль трех ортогональных направлений;
датчик сильных движений (ПСАК), представляющий собой трехкомпонентный векторный сейсмометр;
датчик пространственной ориентации (ДПО).
ПСАК снабжен сенсором, который состоит из магнитоупругого кристаллического преобразователя, постоянного магнита высокой энергии, трех независимых электрических обмоток и единой инертной массы, а также предварительного усилителя. ПСАК преобразует три компоненты вектора акустических колебаний донной поверхности по трем ортогональным направлениям в электрические сигналы. ПСАК имеет велаксметрическую характеристику, которая, по сравнению с характеристиками традиционных приборов для измерения вибросмещений, имеет высокую частотно-зависимую чувствительность к смещениям. Чувствительность ПСАК при увеличении частоты в 10 раз увеличивается в 1000 раз.
Для сравнения следует упомянуть, что при таком же увеличении частоты чувствительность обычных велосиметров увеличивается в 10 раз, а обычных акселерометров - увеличивается в 100 раз.
Собственные шумы магнитоупругого сенсора меньше собственных шумов сейсмометра и намного меньше собственных шумов акселерометра.
Магнитоупругий сенсор ПСАК с крутой амплитудно-частотной характеристикой может одновременно регистрировать смещения в существенном диапазоне - более 240 дБ, что позволяет одновременно измерять амплитуды смещений менее 10-15 м на частотах более 1000 Гц и более 10-3 м на частотах менее 1 Гц.
Датчик обнаружения метана 22 представляет собой датчик типа METS ("CAPSUM"), который позволяют измерять концентрацию метана в водной толще. Датчик представляет собой полупроводниковый прибор, принцип работы которого заключается в том, что диффузия молекул углеводородов из воды через специальную силиконовую мембрану транслируется в камеру датчика. Адсорбция молекул углеводов на активном слое датчика приводит к электронному обмену с молекулами кислорода, таким образом, меняя сопротивление активного слоя, которое преобразуется в выходное (измеряемое) напряжение.
Основные характеристики датчика:
10 мкм силиконовая мембрана;
рабочая глубина 0-3500 м;
рабочая температура 2-20 градусов C;
время измерения от 1 до 3 сек;
время стабилизации диффузии до 5 минут, в зависимости от турбулентности;
входное напряжение 9-36 В;
расход энергии 160 мА/ч;
выходной сигнал - аналоговый 0-5 В и цифровой RS - 485;
метан 50 нмоль/л - 10 мкмоль/л.
Блок гидрохимических измерений 21 предназначен для измерения спектров комбинационного рассеяния оптического излучения в составе подводной обсерватории посредством спектроанализатора. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Блок гидрохимических измерений 21 содержит модуль контроля радиационного загрязнения, который предназначен для определения in situ содержания гамма-излучающих радионуклидов (как техногенного, так и естественного происхождения) в морской воде.
Основные технические характеристики модуля контроля радиационного загрязнения: диапазон регистрируемых энергий 0,2-3,0 мэВ, энергетическое разрешение по линии цезия 137 13%, число уровней квантования спектра 256, максимальное число отсчетов в канале 65 000, максимальная скорость регистрации не менее 1000 1/с.
Блок гидрохимических измерений 21 также содержит классификатор для классификации загрязнений морской воды по спектральным характеристикам и молекулярному составу морской воды. Аналогами датчиков блока гидрохимических измерений являются устройства, приведенные в источниках (1. Основные процессы и аппаратура химической технологии. Под ред. Дытнерского Ю.Н. - М.: Химия, 1983. 2. Химико-аналитические комплексы фирмы Agilent Technologies (US), http://www.chem.agilent.com. 3. Химико-аналитические комплексы фирмы SRI Instruments (US), http://www.perichrom.com. 4. Химико-аналитические комплексы ЗАО "Хроматэк" (RU), http://www.chronomatec.ru).
Датчик ядерно-магнитного резонанса 27 представляет собой минимагнитную систему, состоящую из самарий-кобальтовых шайб с большой постоянной намагниченностью и большой энергоемкостью. При массе магнита 9 кг удается достигнуть значения индукции магнитного поля в его зазоре до 1,5 T. Таким образом, при плавной механической регулировке междуполюсного расстояния магнитной системы рабочая частота может изменяться в пределах от 12 до 60 МГц для протонов при сохранении достаточно высокой однородности. Магнит функционирует без потребления энергоресурсов и предназначен для выявления распределения температуры морской воды, солености, наличие кислорода на фиксированном разрезе. Известно, что в морской воде содержится большое количество парамагнитных примесей в виде парамагнитных ионов переходных металлов и их комплексных соединений в парамагнитном состоянии. Изучение их распределения в морской воде представляет большой научный интерес. Парамагнитные примеси могут служить в качестве трассеров для изучения динамики водных масс. Исследование динамики концентрационных полей парамагнитных примесей дает дополнительную информацию о степени и масштабе влияния внешних источников парамагнитных примесей (речной сток, глубинные гидротермы, вулканическая деятельность, сброс промышленных отходов и т.д.) на компонентный и структурный состав морских и океанических вод. По сигналам с датчика ядерно-магнитного резонанса 27 строят графики распределения времени спин-решеточной релаксации (T1) (так называемые изолинии T1) в поверхностном и в придонном слоях воды. Полученные изолинии позволяют "оконтурить" зоны влияния на компонентный состав поверхностной и придонной морской воды таких источников парамагнитных примесей, как речной сток и области геохимической аномалии, приуроченные к геологическому разлому.
По выявленным трассерам устанавливают динамику водных масс в зоне установки подводной обсерватории. По концентрационным полям парамагнитных примесей определяют степень загрязнения техногенного характера.
Датчик ядерно-магнитного резонанса 27 может быть конструктивно установлен как на раме 1, так и в корпусе буя, который используется для обеспечения функционирования подводной обсерватории по прямому назначению или в двух вариантах, что существенно повышает информативность устройства в целом.
Испытания предлагаемого устройства проводились с 9 апреля 2008 г. по 16 октября 2008. Сеансы записи составляли 10 полных суток, после чего считывались записи сейсмических сигналов и показатели времени, устанавливался новый отсчет времени по GPS и запускался режим записи регистратора.
При этом были зарегистрированы сигналы от удаленных землетрясений (Сычуань, Китай, 12.05.2008, M=7,5; Хонсю, Япония, 13.06.2008, M=6,8; оз. Байкал, 27.08.2008, M=6,2), что свидетельствует о высокой чувствительности и надежности тракта регистрации.
На фиг.8 приведен пример записи вертикальной компоненты Сычуаньского землетрясения на которой хорошо видны вступления объемных P и S волн. Расстояние до эпицентра землетрясения около 5600 км.
На фиг.9 представлен фрагмент записи вертикальной компоненты сейсмоприемника землетрясения на о. Хонсю.
На фиг.10 - фрагмент записи землетрясения на юге озера Байкал.
В период испытаний измерения выполнялись посредством датчиков слабых сейсмических сигналов (сейсмический модуль 14), измеряющих три компоненты (горизонтальная, вертикальная и наклонная составляющие) в диапазоне 0,008-0,1 Гц, и датчиков сильных движений дна (сейсмоакустических модуль 15) в диапазоне 0,01-20 Гц, измеряющих также три компоненты, регистрировались сигналы на границе раздела морская вода-морской грунт.
В качестве измерительных датчиков также использовались протонные и квантовые вариометры и магнитометры для измерения электрической и магнитной компоненты естественного электромагнитного поля Земли с выделением магнитотеллурической составляющей на фоне помех с разносом электрических и магнитных датчиков на величину Δr≤(0,013…0,025)r (где r - расстояние между приемником и источником). При этом, выделение магнитотеллурической составляющей на фоне помех существенно упрощается, так как помехи по электрическому и магнитному каналам вызваны различными источниками (являются некоррелированными) ввиду разноса датчиков на величину Δr. При этом магнитные составляющие естественного магнитного поля меньше, чем электрические, зависят от характера геоэлектрического разреза вдали от горизонтальных неоднородностей.
Зарегистрированные сигналы подвергались обработке для каждого конкретного момента времени для получения временной зависимости в границах, характеризующих уровни состояния естественного геофизического поля и гидрофизических полей.
Блок управления и регистрации 17 анализировал уровень сигналов, поступающих от сейсмоакустического модуля 15, и в случае повышения порогового уровня включал сейсмический модуль 14, и в случае существенных вертикальных или наклонных скоростей смещения элементов движения дна формировал пакет сообщений, который по гидроакустическому каналу связи передавался на диспетчерскую станцию.
Поскольку блок управления и регистрации 17 работал с инерцией, то для исключения потери первых вступительных сильных движений дна сигналы с выходов датчиков сейсмического модуля 14 непрерывно регистрировались в буферную память блока управления и регистрации 17, которые затем использовались для определения элементов движения дна и регистрировались в цифровом многоканальном накопителе информации блока управления и регистрации 17.
При этом пороговый уровень определялся путем усреднения за длительный период времени сейсмических шумов, поступающих с выходов датчиков сейсмического модуля 14.
Гидроакустический канал связи обеспечивал дальность до 8000 м с диапазоном частот сигналов переносчиков команд 7-10 кГц.
При обработке сигналов в качестве решающей статистики использовалась сумма квадратов амплитуд, имеющая максимальное значение для сигнала ожидаемой структуры. Вычисления выполнялись для каждого момента времени для получения временной зависимости для каждого поля. Присутствие в ней максимума означает наличие в источнике ожидаемой структуры возбуждения того или иного поля. Глобальный максимум соответствует времени прихода совокупного принятого сигнала. При достижении величины глобального максимума, равного среднему значению между амплитудами, характеризующими уровни состояния естественного геофизического и гидрофизического полей, судят о возможности наступления катастрофического явления.
Выделение из спектра горизонтальных составляющих нечетных гармоник 0,003 и 0,005 Гц, а из спектра вертикальных составляющих четных гармоник 0,002, 0,004, 0,006 и 0,008 Гц с регистрацией уровня моря на береговых станциях позволяет исключить влияние микросейшивых составляющих, обусловленных в основном влиянием приливных колебаний.
Гидроакустический размыкатель 4 предназначен для управления работой размыкателя якоря 6, необходимого для проведения спуско-подъемных работ подводной обсерватории.
Алгоритм основного режима работы диспетчерских станций при обслуживании сети из нескольких подводных обсерваторий перед их постановкой на морское дно заключается в обеспечении связи между подводными обсерваториями и диспетчерской станцией, которая осуществляется через оптоволоконный глубоководный кабель по методу доступа с временным разделением абонентов. Каждая подводная обсерватория имеет свой адрес. В этом случае сеть диспетчерских станций работает в симплексном режиме. К одной диспетчерской станции одновременно возможно подключение через глубоководный кабель до 16 подводных обсерваторий, работающих в автономном необслуживаемом режиме.
Количество измерительных каналов в каждой подводной обсерватории зависит от решаемой задачи в конкретном месте постановки подводной обсерватории. В принципе максимальное количество цифровых измерительных каналов может быть до 30, а аналоговых - до 6.
Управляющий компьютер диспетчерской станции и программно-математическое обеспечение, служба реального времени предназначены для управления оборудованием подводной обсерватории, диагностирования ее неисправностей, приема данных, получаемых с подводной обсерватории, и размещения получаемых данных на устройствах накопления информации. Функционирование всего аппаратно-программного комплекса определяется файлом конфигурации, который создается специальной программой и задает наличие подводных обсерваторий, тип используемых геофизических каналов, параметры каналов, а также наличие или отсутствие аппаратуры синхронизации времени (приемник GPS).
При запуске программы регистрации считывается конфигурация всей сети подводной обсерватории и производится привязка времени по Гринвичу с точностью до нескольких десятков микросекунд и расчет поправок к частоте кварца компьютера для поддержания функционирования комплекса в случае кратковременного отказа приемника GPS. Синхронизация времени осуществляется каждую секунду от приемника GPS.
Вслед за синхронизацией происходит опрос, программирование, синхронизация и запуск оборудования отдельных подводных обсерваторий. Запрашивается состояние оборудования каждой подводной обсерватории (ее исправность, наличие каналов, исправность каналов и т.д.). В случае возникших проблем на экран выдается соответствующее сообщение (оно также записывается в файл протокола функционирования). В блок регистрации и управления подводной обсерватории передается программа работы для каждого измерительного канала, частота опроса и коэффициент усиления.
Перед запуском каждый блок управления и регистрации синхронизируется по времени компьютера диспетчерской станции (в дальнейшем синхронизация проводится каждые 10 сек). При синхронизации учитывается время прохождения сигнала от компьютера диспетчерской станции до синхронизируемого блока регистрации и управления. После этого блок регистрации и управления запускается и начинает сбор данных с измерительных каналов. Блок регистрации и управления в каждой подводной обсерватории работает независимо и всю информацию сжимает и складывает в буферную память.
Управляющий компьютер диспетчерской станции циклически запрашивает у соответствующего блока управления и регистрации данные о зарегистрированных датчиками сигналов и, в случае их наличия, принимает их и записывает в свои буфера в оперативной памяти. После накопления достаточного количества данных для канала они переписываются в файл, соответствующий типу канала. Обычно эти файлы расположены на другом компьютере и доступны по локальной сети, хотя для кратковременных экспериментов система может быть сконфигурирована таким образом, что будет использоваться локальный диск. При кратковременных разрывах связи (до 10 мин) данные не теряются в силу наличия у каждого блока управления и регистрации достаточно большого собственного буфера. В процессе обмена данными оператором может быть проведена калибровка любого измерительного канала, входящего в состав сети диспетчерской станции. При возникновении нештатных ситуаций (разрыв связи с подводной обсерваторией, ее поломка, отказ отдельных каналов либо восстановление вышеперечисленного), а также некоторых штатных ситуаций - возникновение события или запуск калибровки соответствующего измерительного канала, выдается сообщение на экран, включающее время по Гринвичу наступления ситуации, имена подводных обсерваторий и канала и само сообщение. Сообщения также записываются в буфер размером 100 строк и в файл протокола. Буфер может быть просмотрен оператором в любое время.
Измерительные датчики подводной обсерватории после ее постановки на дно функционируют по прямому назначению. Зарегистрированные датчиками сигналы записываются на средства хранения информации, при сеансах связи передаются на диспетчерскую станцию, где выполняется полный анализ оценки сейсмического и гидродинамического состояния исследуемых районов, по результатам которого делается прогноз о возможных сейсмических и экологических последствиях природного и техногенного характера.
Реализация устройства технической сложности не представляет, так как устройство реализовано на серийно выпускаемых датчиках и элементах микроэлектроники, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации
1. Патент RU №2270464.
2. Патент RU №2276388.
3. Патент RU №2294000.
4. Патент EP №0519031.
5. Патент NO №911639.
6. Патент EP №0516662.
7. Средства и методы океанологических исследований. Смирнов Г.В., Еремеев В.Н., Агеев М.Д. и др. - М., Наука, 2005.
8. Патент AU №2002100749 от 04.09.2002.
9. Патент RU №2348950.
10. Соловьев С.Л. История и перспективы развития морской сейсмологии. М.: Наука. 1985, с.11.
11. Левин Б.В., Носов М.А. Физика цунами. М.: «Янус-К». 2005, с.152.
12. Заявка RU №2010116092.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2433428C2 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2007 |
|
RU2348950C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ СТАНЦИЯ ДЛЯ ГЕОЛОГИЧЕСКОГО МОНИТОРИНГА АКВАТОРИЙ | 2014 |
|
RU2566599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2010 |
|
RU2433430C2 |
Изобретение относится к устройствам для подводных геофизических исследований морей и океанов. Сущность: подводная обсерватория сочленена с судовым комплексом и включает устройство типа «Data»-буй. Устройство типа «Data»-буй состоит из прочного герметичного корпуса сферической формы, выполненного из титана и установленного на несущей раме. На несущей раме и в корпусе устройства «Data»-буй размещены средства регистрации геофизических и гидрофизических данных: сейсмометр, гидрофизический модуль, датчики магнитного поля, обнаружения метана, давления, пространственной ориентации, а также датчики ядерно-магнитного резонанса. Технический результат: расширение функциональных возможностей и повышение надежности при эксплуатации. 1 з.п. ф-лы, 10 ил.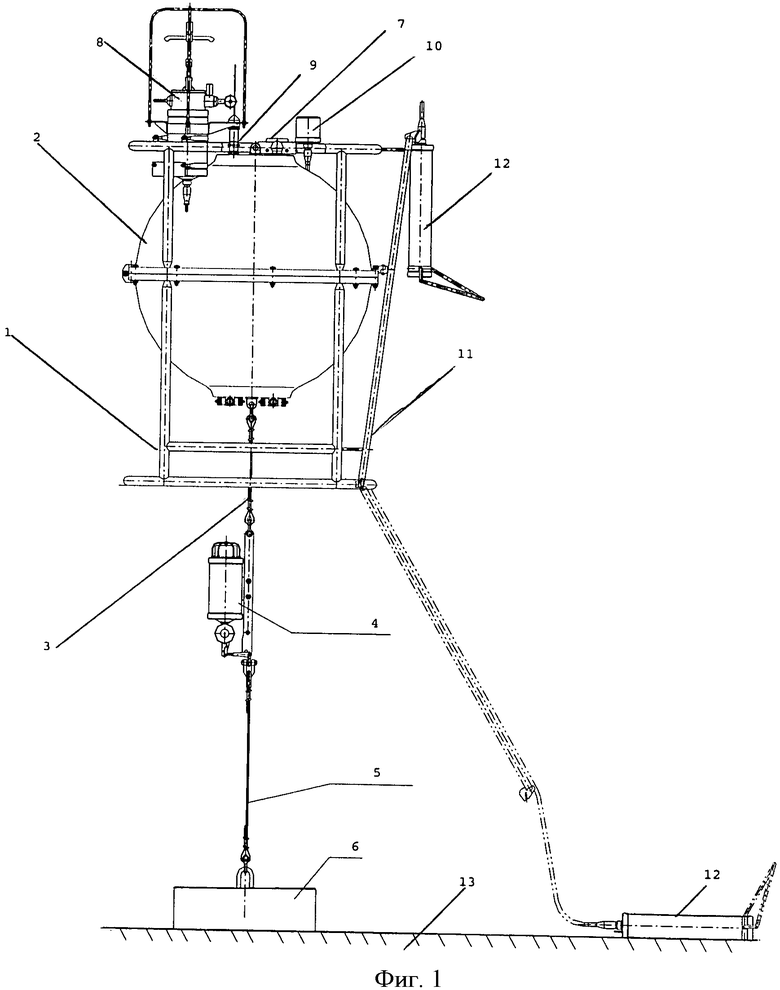
1. Подводная обсерватория, сочлененная с судовым комплексом и включающая устройство типа "Data"-буй, состоящее из герметичного прочного корпуса, установленного на несущей раме, и содержащая средства регистрации геофизических и гидрофизических данных, включающие сейсмометр, гидрофизический модуль, датчик магнитного поля, средства связи с комплексом судовой аппаратуры, радиобуй, балласт, размыкатель балласта, блок гидрохимических измерений, блок гидроакустического телеуправления, блок регистрации и управления, в котором блок гидрохимических измерений своим выходом соединен с входом блока регистрации и управления, который другими входами соединен с выходами сейсмометра, гидрофизического модуля, датчика магнитного поля, а входом-выходом соединен с входом-выходом блока гидроакустического телеуправления, дополнительно содержащая датчик обнаружения метана, соединенный своим выходом с блоком регистрации и управления, донный датчик давления, соединенный своим выходом с блоком регистрации и управления, датчик пространственной ориентации, соединенный своим входом-выходом с входом-выходом блока регистрации и управления; сейсмометр состоит из сейсмического модуля и сейсмоакустического модуля, при этом герметичный прочный корпус, установленный на несущей раме, имеет сферическую форму и выполнен из титана с соотношением запаса плавучести к полной массе подводной обсерватории 1:1,35, несущая рама снабжена анкерным устройством, на выносной штанге которого установлен сейсмический модуль, отличающаяся тем, что на несущей раме и в корпусе устройства типа "Data"-буй размещены датчики ядерно-магнитного резонанса, соединенные своими выходами с входом блока регистрации и управления.
2. Подводная обсерватория по п.1, отличающаяся тем, что датчик ядерно-магнитного резонанса состоит из самарий-кобальтовых шайб.
| Башилов И.П | |||
| и др | |||
| Донные геофизические обсерватории: методы конструирования и области применения / Научное приборостроение, 2008, т.18, №2, с.93-95 | |||
| RU 2009116092 А, 20.11.2010 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М., 13.10.2008 | |||
| СПОСОБ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ, ДОННЫХ ОТЛОЖЕНИЙ И АТМОСФЕРЫ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, УЛОЖЕННЫХ НА ДНЕ ВОДОЕМОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331876C2 |

