ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с нижеперечисленными, одновременно поданными заявками на патенты США, которые включены в настоящую заявку путем отсылки:
(1) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MECHANICAL LINKAGE COUPLING END EFFECTOR AND TRIGGER MOTION; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060346/END5912USNP);
(2) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH A VARIABLE CONTROL OF THE ACTUATING RATE OF FIRING WITH MECHANICAL POWER ASSIST; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060323/END5913USNP);
(3) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH AUDIBLE AND VISUAL FEEDBACK FEATURES; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060345/END5914USNP);
(4) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH REPLACEABLE POWER SOURCES; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060326/END5955USNP);
(5) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH IMPROVED VOLUME STORAGE; Изобретатели: Frederick E. Shelton, IV and Jerome R. Morgan; (K&LNG 060327/END5956USNP);
(6) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MANUALLY OPERATED RETRACTION APPARATUS; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060328/END5957USNP); и
(7) PNEUMATICALLY POWERED SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ACTUATOR AT DISTAL END; Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Eugene L. Timperman, and Leslie M. Fugikawa (K&LNG 060344/END5911USNP).
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к хирургическим аппаратам и, в частности, к пневмоприводным хирургическим отрезным и фиксирующим аппаратам. Настоящее изобретение может быть применимо в традиционном инструментарии для эндоскопической и открытой хирургии, а также применимо в хирургии с применением робототехники.
Хирургические отрезные и фиксирующие аппараты (сшивающие аппараты) применялись прежде для одновременного выполнения продольного разреза в ткани и наложения рядов скобок на противоположные стороны разреза. Такие аппараты обычно содержат пару согласованно действующих зажимных элементов, которые, если аппарат предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует упор, содержащий скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Аппарат содержит множество возвратно-поступательно перемещающихся клиньев, которые, при приведении в движение в дистальном направлении, проходят сквозь отверстия в кассете для скобок и входят в контакт с поводками, служащими опорой для скобок, для выполнения выталкивания скобок к упору.
С годами разработано множество разнообразных способов приведения в действие отрезных и скобкоустанавливающих компонентов. Например, в патенте США №6978921 изобретателей Шелтона, IV, с соавторами (Shelton, IV et al.) описан хирургический сшивающий скобками аппарат, в котором применяются ткане-рассекающие и скобкоустанавливающие компоненты, которые приводятся в движение ручным приведением в действие различных рычажно-спусковых механизмов на рукоятке. Созданы другие хирургические сшивающие скобками аппараты, в которых применяются электродвигатели, работающие от аккумуляторов. Подобное устройство описано в патенте США №5954259 изобретателя Виолы с соавторами (Viola et al.).
Другие хирургические сшивающие скобками аппараты приводятся в действие источником сжатого газа. Например, в патенте США №6619529 изобретателя Грина с соавторами (Green et al.) описан хирургический сшивающий скобками аппарат, в котором применяется источник сжатого газа в рукоятке, который служит для приведения в действие цилиндра, который также расположен в рукоятке. Цилиндр вмещает поршневой узел, который приводится в движение при пропускании сжатого газа в цилиндр. Поршень выполнен с возможностью взаимодействия с компонентами, расположенными в удлиненном трубчатом участке и элементе рукоятки, для осуществления установки скобок и движения хирургического ножа в дистально установленном концевом эффекторе. Однако подобная конструкция использует сложную совокупность компонентов для передачи движения поршня, установленного в рукоятке, компонентам, расположенным на участке концевого эффектора устройства. Кроме того, при использовании подобного устройства существует риск, что источник энергии истощится во время хирургической операции из-за отсутствия способа контроля количества газа, остающегося в газовом баллончике. Если это происходит в ходе циклов прошивки/отрезания или отведения, данные устройства не содержат средства для простой замены отработанного контейнера новым контейнером или вспомогательным источником энергии.
Другое пневмоприводное хирургическое сшивающее скобками устройство описано в патентной публикации США №US 2006/0151567 изобретателя Роя (Roy). В данном устройстве применяется система с пневматическим двигателем или цилиндром, установленная в рукоятке устройства для произведения движения, которое служит для приведения в действие концевого эффектора. Данное устройство может получать энергию от сменных баллончиков или от внешнего источника энергии, например, существующей в больнице сети сжатого воздуха или газа.
Манипулирование такими пневмоприводными устройствами, в которых используют баллончики или контейнеры в участке рукоятки устройства, затрудняется также из-за размера газового баллона, необходимого для хранения сжатого газа в объеме, достаточном для поддержки срабатывания устройства искомое число раз при минимальном применимом давлении. В прошлом в устройствах, предназначенных для большого числа применений/операций, требовалось применять большой баллон или, если применялись баллоны меньшего размера, требовалось, чтобы данные баллоны были под нежелательно высокими давлениями. Кроме того, устройства, в которых применялись сменные баллончики, которые можно применять неограниченное число раз, должны проходить повторную обработку и повторную стерилизацию. Подобные конструкции могут резко изменять рабочие характеристики и потому могут быть менее желательными.
Другие проблемы имеют место с ранее известными пневмоприводными эндоскопическими режущими инструментами типа endocutter. Например, после того как хирург приводит аппарат в действие одним переключателем или рычагом включения, аппарат продвигается через весь или, по меньшей мере, делает попытку продвинуться через весь цикл прошивки/отрезания. Затем компоненты прошивки/отрезания могут быть отведены приводной системой. Хирург, применяющий устройство, описанное в патентной публикации США №2006/0151567, может прервать цикл прошивки/отрезания и/или настроить поток газа в устройство через узел рычага, однако средство контроля продвижения устройства отсутствует. Кроме того, данные ранее известные устройства не содержат средства для ручного отведения механизма ножа и прошивной планки, если рабочее давление исчезает или прерывается во время операции. Кроме того, данное устройство не содержит средства для представления врачу возможности приложения вручную дополнительного усилия к приводной системе, чтобы поддерживать выдвижение прошивного/отрезного механизма или замедлять такое выдвижение.
Следовательно, существует потребность в пневмоприводном хирургическом сшивающем скобками устройстве, которое не требует применения широкой группы компонентов для передачи пневматически вызванных движений сшивания скобками и отрезания компонентам концевого эффектора.
Существует другая потребность в пневмоприводном хирургическом сшивающем скобками устройстве, которое обеспечивает хирургу средство для управления и контроля продвижения устройства, по мере того как данное устройство перемещается в ходе цикла прошивки/отрезания и отведения.
Существует еще одна потребность в пневмоприводном хирургическом сшивающем скобками устройстве, которое обеспечивает хирургу тактильную и другую обратную связь по усилиям, встречающимся во время прошивки/отрезания, а также сообщение о том, когда устройство достигло своего сработавшего положения и готово к отведению.
Существует потребность в пневмоприводном хирургическом сшивающем скобками устройстве, которое экономично и обладает способностью к легкой смене источников энергии, при ограничении числа допустимых замен данных источников.
Существует другая потребность в способах и устройствах для более эффективного хранения газа в баллонах, используемых для снабжения энергией хирургических сшивающих скобками устройств, чтобы от одного баллона можно было получать энергию большее число раз.
Существует еще одна потребность в пневмоприводном хирургическом сшивающем скобками устройстве, которое содержит средство для ручного отведения узла ножа и прошивной планки, если рабочее давление исчезает или прерывается.
Существует еще одна потребность в устройствах, которые содержат, по меньшей мере, одну из вышеупомянутых возможностей и которые также содержат концевой эффектор, который можно селективно шарнирно поворачивать относительно узла рукоятки и/или участка узла удлиненного стержня, с которым он соединен.
Существует еще одна потребность в устройствах, которые содержат, по меньшей мере, одну из вышеупомянутых возможностей и которые могут также вмещать разъемно присоединяемые концевые эффекторы для облегчения применения устройства в связи с концевыми эффекторами одноразовой конструкции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом целью настоящего изобретения является хирургический аппарат, содержащий дистальный элемент, который выполнен с возможностью установки узла пневмоприводного инструмента. Аппарат может содержать узел удлиненного стержня, который имеет проксимальный концевой участок и дистальный концевой участок. Дистальный концевой участок может быть соединен с дистальным элементом. Аппарат может дополнительно содержать пневматический элемент привода, который установлен на дистальном концевом участке узла удлиненного стержня. Элемент привода может быть выполнен с возможностью сообщения, по меньшей мере, двух вращательных приводящих движений узлу пневмоприводного инструмента, который установлен в дистальном элементе, при получении, по меньшей мере, одного пневматического управляющего сигнала из источника пневматической энергии.
В соответствии с другим общим аспектом целью настоящего изобретения является хирургический аппарат, который может содержать узел рукоятки и смыкающий привод, который установлен с возможностью функционирования в узле рукоятки и выполнен с возможностью создания замыкающего движения и размыкающего движения. В узле рукоятки может быть также установлен исполнительный механизм, чтобы данный механизм сообщался с источником пневматической энергии для селективного создания, по меньшей мере, одного пневматического управляющего сигнала. Узел удлиненного стержня может быть присоединен с возможностью функционирования к узлу рукоятки и сообщаться со смыкающим приводом для передачи размыкающего и замыкающего движений, а также пневматических управляющих сигналов. Пневматический элемент привода может быть установлен с возможностью функционирования на дистальном конце узла удлиненного стержня и может быть выполнен с возможностью создания вращательного прошивного/отрезного движения и вращательного отводящего движения в ответ на пневматические управляющие сигналы. Аппарат может дополнительно содержать концевой эффектор, который соединен с узлом удлиненного стержня. Концевой эффектор в различных неограничивающих вариантах осуществления может содержать удлиненный желоб, который выполнен с размером для установки в него кассеты для скобок. Упор соединен с возможностью поворота с удлиненным желобом и реагирует поворотом на размыкающее и замыкающее движения от узла удлиненного стержня. Отрезной и сшивающий элемент установлен с возможностью функционирования в удлиненном желобе и реагирует на вращательные отрезное/прошивное и отводящее движения от пневматического элемента привода.
ЧЕРТЕЖИ
В настоящей заявке представлены для примера описания различных вариантов осуществления настоящего изобретения в сочетании со следующими фигурами, на которых одинаковые позиции применяются для обозначения одинаковых частей и на которых:
Фиг.1 - вид в перспективе варианта осуществления хирургического отрезного и фиксирующего аппарата в соответствии с настоящим изобретением;
Фиг.2 - общий вид с пространственным разделением деталей конструкции концевого эффектора, который можно применять в сочетании с различными вариантами осуществления настоящего изобретения;
Фиг.3 - вид сверху концевого эффектора, показанного на Фиг.1 и 2, с участком упора, снятым с него, и узлом замыкающей трубкой, показанным пунктирными линиями;
Фиг.4 - вид сбоку в разрезе конструкции концевого эффектора, показанного на Фиг.3, с участком упора, соединенным с ним и показанным в разомкнутом положении;
Фиг.5 - вид сверху в разрезе участка устройства управления шарнирным поворотом, который можно применять с различными вариантами осуществления настоящего изобретения;
Фиг.6 - вид сверху в разрезе, изображающий шарнирный поворот концевого эффектора, показанного на Фиг.1;
Фиг.7 - общий вид с пространственным разделением деталей, иллюстрирующий вариант осуществления узла замыкающей трубки и конструкции возвратно-поступательной муфты, установленной в узле рукоятки с другими компонентами, вмещенными в корпусной узел, исключенными для ясности;
Фиг.8 - вид в разрезе конструкции корпусного узла различных вариантов осуществления настоящего изобретения;
Фиг.8A - местный вид в разрезе участка системы блокировки замыкающего рычага, которую можно применить в связи с различными вариантами осуществления настоящего изобретения;
Фиг.8B - вид в разрезе другого варианта осуществления узла рукоятки по настоящему изобретению, в котором источник сжатого газа является внешним относительно узла рукоятки;
Фиг.8C - вид в разрезе другого варианта осуществления узла рукоятки по настоящему изобретению;
Фиг.9 - другой вид в разрезе узла рукоятки, показанного на Фиг.8;
Фиг.10 - вид сбоку конструкции ножевой планки и элемента привода прошивки/отрезания, который содержит узел двухступенчатого цилиндра в соответствии с различными вариантами осуществления настоящего изобретения, с узлом цилиндра, показанным в разрезе;
Фиг.11 - другой вид сбоку конструкций ножевой планки и двухступенчатого цилиндра, показанных на Фиг.10, с ножевой планкой в выдвинутом положении;
Фиг.12 - вид сбоку другой конструкции ножевой планки и элемента привода прошивки/отрезания в соответствии с настоящим изобретением с ножевой планкой, отведенной в узел цилиндра, показанный в разрезе;
Фиг.13 - другой вид сбоку конструкций ножевой планки и цилиндра, показанных на Фиг.12, с ножевой планкой в выдвинутом положении;
Фиг.14 - вид сверху конструкции концевого эффектора и несущего узла, вмещающего конструкции цилиндра и ножевой планки, показанных на Фиг.12 и 13;
Фиг.15 - вид сбоку в разрезе конструкции концевого эффектора и несущего узла, показанных на Фиг.14, с соединенным с ней участком упора в разомкнутом положении;
Фиг.16 - вид в разрезе узла рукоятки, который можно применять в связи с вариантом осуществления, показанным на Фиг.12-15;
Фиг.16A - вид в разрезе другого узла рукоятки, который можно применять в связи с вариантом осуществления, показанным на Фиг.12-15, причем источник сжатого газа является внешним относительно узла рукоятки;
Фиг.16B - вид в разрезе другого варианта осуществления узла рукоятки в соответствии с настоящим изобретением;
Фиг.17 - вид сверху другой конструкции ножевой планки и несущего узла, который служит опорой для другого элемента прошивного/отрезного привода в форме мембранной коробки, в соответствии с другим вариантом осуществления настоящего изобретения;
Фиг.18 - вид сбоку в разрезе конструкций концевого эффектора и несущего узла в варианте осуществления, показанном на Фиг.17;
Фиг.19 - сборочный вид с местным разрезом мембранной коробки в соответствии с вариантами осуществления, показанными на Фиг.17 и 18;
Фиг.20 - увеличенный вид участка мембранной коробки, показанной на Фиг.19;
Фиг.21 - вид в разрезе варианта осуществления узла рукоятки, который можно применить с вариантами осуществления, показанными на Фиг.17-20;
Фиг.21A - вид в разрезе другого варианта осуществления узла рукоятки, который можно применить в связи с вариантами осуществления, показанными на Фиг.17-20, причем источник сжатого газа является внешним относительно узла рукоятки;
Фиг.21B - вид в разрезе другого варианта осуществления узла рукоятки в соответствии с настоящим изобретением;
Фиг.22 - вид в перспективе другого хирургического отрезного и фиксирующего аппарата в соответствии с другими вариантами осуществления настоящего изобретения;
Фиг.23 - вид сбоку в разрезе концевого эффектора и несущего узла в варианте изобретения, показанном на Фиг.22;
Фиг.24 - вид в разрезе конструкции быстроразъемного сочленения в варианте осуществления, показанном на Фиг.22 и 23, перед соединением дистального узла стержня с проксимальным узлом стержня;
Фиг.25 - вид в разрезе проксимального узла стержня по линии 25-25 на Фиг.24;
Фиг.26 - местный вид в перспективе дистального узла стержня, соединенного с проксимальным узлом стержня, причем участок дистального узла стержня не показан для ясности;
Фиг.27 - вид сбоку в разрезе узла сочленения в вариантах осуществления, показанных на Фиг.24-26, с дистальным узлом стержня, соединенным с проксимальным узлом стержня;
Фиг.28 - вид в перспективе участка дистального узла стержня до соединения с участком проксимального узла стержня;
Фиг.29 - местный вид в разрезе другой конструкции быстроразъемного сочленения в варианте осуществления, которую можно применить с вариантом осуществления, показанным на Фиг.12-16A;
Фиг.30 - вид в разрезе проксимального узла стержня по линии 30-30 на Фиг.29;
Фиг.31 - вид в перспективе участка проксимального узла стержня, который можно применить в связи с вариантами осуществления, показанными на Фиг.22-30;
Фиг.32 - вид в перспективе другого хирургического отрезного и фиксирующего аппарата в соответствии с настоящим изобретением, в котором применяется пневмоприводное шарнирно-поворотное сочленение в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.33 - местный вид в перспективе участка шарнирно-поворотного сочленения, соединяющего дистальный несущий сегмент с проксимальным несущим сегментом в варианте осуществления, показанном на Фиг.32;
Фиг.34 - другой вид в перспективе конструкции шарнирно-поворотного сочленения, показанного на Фиг.33, со снятой с него крышкой, где изображен дистальный несущий сегмент, шарнирно повернутый относительно проксимального несущего сегмента;
Фиг.35 - общий вид с пространственным разделением деталей конструкции шарнирно-поворотного сочленения, показанного на Фиг.33 и 34;
Фиг.36 - вид сбоку в разрезе узла сочленения, показанного на Фиг.33-35;
Фиг.37 - вид в перспективе варианта осуществления переключающего узла в соответствии с настоящим изобретением;
Фиг.38 - вид сбоку переключающего узла, показанного на Фиг.37;
Фиг.39 - вид в разрезе переключающего узла, показанного на Фиг.37 и 38, взятом по линии 39-39 на Фиг.37;
Фиг.40 - вид в разрезе переключающего узла в выключенном положении, взятом по линии 40-40 на Фиг.38;
Фиг.41 - другой вид в разрезе переключающего узла, показанного на Фиг.37-40, во включенном положении;
Фиг.42 - вид в разрезе переключающего узла, показанного на Фиг.41, взятом по линии 42-42 на Фиг.41;
Фиг.43 - вид снизу переключающего узла, показанного на Фиг.37-42;
Фиг.44 - вид в разрезе узла рукоятки, который содержит в себе переключающий узел, показанный на Фиг.37-43, и вмещает источник сжатого газа;
Фиг.45 - вид в разрезе узла рукоятки, который содержит в себе переключающий узел, показанный на Фиг.37-43, и в котором источник сжатого газа является внешним относительно узла рукоятки;
Фиг.46 - вид в перспективе другого хирургического отрезного и фиксирующего аппарата в соответствии с настоящим изобретением, в котором применяются варианты осуществления шарнирно-поворотного сочленения, показанные на Фиг.33-36, и варианты осуществления быстроразъемного сочленения, показанные на Фиг.23-31;
Фиг.47 - вид в разрезе конструкции быстроразъемного сочленения в варианте осуществления, показанном на Фиг.46, перед соединением дистального узла стержня с проксимальным узлом стержня;
Фиг.48 - вид в разрезе узла сочленения в вариантах осуществления, показанных на Фиг.47, взятом по линии 48-48 на Фиг.47;
Фиг.49 - вид в перспективе другого варианта осуществления хирургического отрезного и фиксирующего аппарата в соответствии с настоящим изобретением;
Фиг.50 - общий вид с пространственным разделением деталей конструкции концевого эффектора, которую можно применить в связи с вариантом осуществления, показанным на Фиг.49;
Фиг.51 - общий вид с пространственным разделением деталей конструкции концевого эффектора, несущего узла и узла замыкающей трубки, которые можно применить в связи с вариантом осуществления, показанным на Фиг.49;
Фиг.52 - вид сбоку в разрезе концевого эффектора, несущего узла и узла замыкающей трубки, показанных на Фиг.51, с участком упора, не показанным для ясности;
Фиг.52A - вид сбоку в разрезе концевого эффектора, несущего узла и узла замыкающей трубки в соответствии с другим неограничивающим вариантом осуществления настоящего изобретения, в котором пневматический двигатель установлен дистально от узла рукоятки;
Фиг.52B - вид сбоку в разрезе концевого эффектора, несущего узла и узла замыкающей трубки в соответствии с другим неограничивающим вариантом осуществления настоящего изобретения, в котором пневматический двигатель установлен дистально от узла рукоятки;
Фиг.53 - вид в разрезе узла рукоятки, который можно применить в связи с вариантом осуществления, показанным на Фиг.49;
Фиг.53A - вид в разрезе другого узла рукоятки, который можно применить в связи с вариантом осуществления, показанным на Фиг.49, в котором источник сжатого газа является внешним относительно узла рукоятки;
Фиг.54 - еще один вид в разрезе узла рукоятки, показанного на Фиг.53;
Фиг.55 - вид сбоку относительного расположения конструкции прошивного/отрезного рычага в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.56 - схематическое изображение варианта осуществления системы управления в соответствии с настоящим изобретением, который можно применить в связи с различными вариантами осуществления настоящего изобретения;
Фиг.57 - вид в сечении участка съемной ручки, отсоединенного от основного соединительного участка различных вариантов осуществления узла рукоятки в соответствии с настоящим изобретением;
Фиг.58 - местный вид в разрезе, изображающий участок съемной ручки, присоединенный к основному соединительному участку узла рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.59 - местный вид в разрезе участка съемной ручки и основного соединительного участка, показанных на Фиг.58, причем распределители и компоненты, относящиеся к цилиндру, не показаны для ясности;
Фиг.60 - вид в разрезе участка съемной ручки и основного соединительного участка, показанных на Фиг.58 и 59, взятом по линии 60-60 на Фиг.59;
Фиг.61 - вид в разрезе участка съемной ручки и основного соединительного участка, показанных на Фиг.58, 59 и 60, взятом по линии 61-61 на Фиг.59;
Фиг.62 - вид в разрезе участка съемной ручки и основного соединительного участка, показанных на Фиг.58-61, взятом по линии 62-62 на Фиг.59;
Фиг.63 - другой местный вид в разрезе участка съемной ручки и основного соединительного участка, показанных на Фиг.58-62, взятом по линии 63-63 на Фиг.59;
Фиг.64 - схематичное изображение варианта осуществления блокировочной системы в соответствии с настоящим изобретением в исходном положении;
Фиг.65 - другое схематичное изображение блокировочной системы, показанной на Фиг.64, изображающее ее срабатывание, когда участок ручки первоначально соединяют с основным соединительным участком узла рукоятки;
Фиг.66 - другое схематичное изображение блокировочной системы, показанной на Фиг.64 и 65, до второго отсоединения участка ручки от основного соединительного участка узла рукоятки;
Фиг.67 - другое схематичное изображение блокировочной системы, показанной на Фиг.64-66, на котором изображены положения компонентов системы, когда участок ручки соединен с основным соединительным участком;
Фиг.68 - другое схематичное изображение блокировочной системы, показанной на Фиг.64-67, на котором изображены положения компонентов системы во время второго соединения участка ручки с основным соединительным участком;
Фиг.69 - другое схематичное изображение, представляющее блокировочную систему после того, как участок ручки соединяют с основным соединительным участком во второй и последний раз;
Фиг.70 - вид в перспективе другого варианта осуществления хирургического отрезного и фиксирующего аппарата в соответствии с настоящим изобретением;
Фиг.71 - вид в разрезе варианта осуществления узла рукоятки, который можно применить в связи аппаратом, показанным на Фиг.70;
Фиг.72 - общий вид с пространственным разделением деталей возвратно-поступательной муфты и узла отводящего штока в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг.72A - общий вид с пространственным разделением деталей возвратно-поступательной муфты и узла отводящего штока в соответствии с другими вариантами осуществления настоящего изобретения;
Фиг.73 - вид в сборе компонентов, показанных на Фиг.72, с их узлом цилиндра в полностью выдвинутом положении;
Фиг.74 - вид сзади в вертикальной проекции варианта осуществления узла возвратно-поступательной муфты в соответствии с настоящим изобретением;
Фиг.75 - другой вид сзади в вертикальной проекции узла возвратно-поступательной муфты, показанного на Фиг.74, с отводящим штоком и толкающим стержнем, продолжающимся в отверстие толкающего стержня, и с толкающим стержнем, соединенным с соединительным элементом;
Фиг.76 - вид сзади в перспективе левостороннего участка узла возвратно-поступательной муфты;
Фиг.77 - другой вид сзади в перспективе левостороннего участка узла возвратно-поступательной муфты;
Фиг.78 - схематичное изображение конструкции системы управления, которую можно применять с вариантами осуществления, показанными на Фиг.70-77;
Фиг.79 - вид сверху в разрезе конструкции узла рукоятки в вариантах осуществления, показанных на Фиг.70-78, с узлом цилиндра в выдвинутом положении;
Фиг.80 - другой вид сверху в разрезе конструкции узла рукоятки в вариантах осуществления, показанных на Фиг.70-79, с узлом цилиндра в отведенном положении;
Фиг.81 - вид в разрезе узла рукоятки в вариантах осуществления, показанных на Фиг.70-80;
Фиг.81A - вид в разрезе варианта осуществления узла рукоятки, который можно применить с вариантом осуществления, показанным на Фиг.70-80, причем источник сжатого газа является внешним относительно узла рукоятки;
Фиг.82 - другой вид в разрезе узла рукоятки, показанного на Фиг.81, причем узел цилиндра выдвинут;
Фиг.83 - другой вид в разрезе узла рукоятки, показанного на Фиг.81, причем узел цилиндра отведен; и
Фиг.83A - вид в разрезе узла рукоятки в варианте осуществления, показанном на Фиг.72B, причем узел цилиндра отведен и прошивной/отрезной шток находится в его крайнем проксимальном положении.
ПОДРОБНОЕ ОПИСАНИЕ
При рассмотрении чертежей, на которых одинаковыми числовыми позициями обозначены аналогичные компоненты на нескольких видах, на Фиг.1 представлен хирургический сшивающий скобками и отрезной аппарат 10, который допускает применение некоторых особых преимуществ настоящего изобретения. Вариант осуществления, показанный на Фиг.1, содержит узел 300 рукоятки, узел 100 удлиненного стержня и концевой эффектор 12, который присоединен к узлу 100 удлиненного стержня. Различные варианты осуществления настоящего изобретения могут содержать концевой эффектор, который присоединен с возможностью поворота к узлу 100 удлиненного стержня и приводится в поворотное движение изгибающимися тросами или лентами, например, такими, которые описаны в заявке на патент США №11/329020, «SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR», поданной 10 января 2006 г., описание которой включено в настоящую заявку путем отсылки. Однако из настоящего подробного описания специалистам со средним уровнем компетентности в данной области техники будет очевидно, что различные варианты осуществления настоящего изобретения можно успешно реализовать в сочетании с конструкциями концевых эффекторов, которые используют отличающиеся поворотные механизмы и элементы управления и, как дополнительно подробно поясняется ниже, могут быть даже успешно применены с нешарнирными конструкциями концевых эффекторов.
Как можно видеть на Фиг.1, узел 300 рукоятки аппарата 10 может содержать замыкающий рычаг 302 и рычаг 310 прошивки. Очевидно, что аппараты, содержащие концевые эффекторы, предназначенные для разных хирургических задач, могут содержать разные количества или типы рычагов, или других подходящих элементов управления для приведения в действие концевого эффектора. Концевой эффектор 12 показан разделенным с узлом 300 рукоятки, предпочтительно удлиненным узлом 100 стержня. Врач может шарнирно поворачивать концевой эффектор 12 относительно узла 100 стержня с помощью устройства 200 управления шарнирным поворотом.
Следует понимать, что термины, обозначающие пространственное положение, например, вертикальный, горизонтальный, правый, левый и т.п., приведены в настоящем описании со ссылкой на фигуры в предположении, что продольная ось хирургического аппарата 10 соосна с центральной осью узла 100 удлиненного стержня, причем рычаги 302, 310 продолжаются вниз под острым углом из нижней части узла 300 рукоятки. В реальной практике, однако, хирургический аппарат 10 можно ориентировать под различными углами, и, по существу, данные термины, обозначающие пространственное положение, применяются по отношению к самому хирургическому аппарату 10. Кроме того, «проксимальный» применяется для обозначения перспективы со стороны врача, который находится позади узла 300 рукоятки и который устанавливает концевой эффектор 12 в дистальном направлении или удаленным от себя.
Для целей настоящего описания термин «сжатый газ» относится к любому газу, подходящему для применения в пневмоприводных системах, используемых в стерильных условиях. Неограничивающие примеры таких сред включают в себя сжатый воздух, диоксид углерода (CO2), азот, кислород, аргон, гелий, гидрид натрия, пропан, изобутан, бутан, хлорфторуглероды, диметиловый эфир, метилэтиловый эфир, оксиды азота, гидрофторалканы (HFA), либо, например, HFA 134a (1,1,1,2,-тетрафторэтан), либо HFA 227 (1,1,1,2,3,3,3-гептафторпропан).
Для целей настоящего описания термин «пневмогидравлически связанный» означает, что элементы связаны между собой соответствующей линией или другим средством, допускающим проход сжатого газа между ними. Для целей настоящего описания термин «линия», используемый в сочетаниях «подводящая линия» или «обратная линия», относится к соответствующему проходу, сформированному из жестких или гибких трубки, патрубка, трубопроводов и т.п. для транспортировки сжатого газа от одного компонента к другому.
Для целей настоящего описания термин «пневматический сигнал» или «пневматический приводной сигнал» относится к потоку газа от источника сжатого газа к, по меньшей мере, одному компоненту, который пневмогидравлически связан с источником сжатого газа, или потоку газа между компонентами, которые пневмогидравлически связаны между собой.
Для целей настоящего описания фраза «по существу, поперечно продольной оси», где «продольная ось» является осью стержня, относится к направлению, которое почти перпендикулярно продольной оси. Однако, очевидно, что направления, которые несколько отклоняются от перпендикулярного продольной оси, также, по существу, поперечны продольной оси.
На Фиг.2 представлен общий вид с пространственным разделением деталей одного типа узла пневмоприводного инструмента или концевого эффектора, который можно применять в различных вариантах осуществления настоящего изобретения. Узел 12 пневмоприводного инструмента, показанный на Фиг.1-4, выполнен с возможностью функционирования в качестве эндоскопического режущего инструмента типа endocutter. Однако ниже из настоящего подробного описания очевидно, что можно также предположить применение различных оригинальных и новаторских приводных конструкций в соответствии с вариантами осуществления настоящего изобретения для приведения в действие других концевых эффекторов, выполненных с возможностью исполнения других хирургических задач и, следовательно, требующих исключения, модификации или добавления компонентов из тех или к тем, которые показаны на фигурах. Кроме того, очевидно, что концевые эффекторы 12, показанные на Фиг.1-4, можно выполнять для специальных хирургических применений.
Один тип концевого эффектора, который можно применять с различными вариантами осуществления настоящего изобретения, изображен на Фиг.2. Как можно видеть на данной фигуре, в концевом эффекторе 12 применяется прошивной/отрезной механизм 30 с Е-образной поперечиной («узел ножа»), который, кроме отрезания ткани и выталкивания скобок, расположенных в цилиндре для скобок, установленном в упомянутый концевой эффектор, предпочтительно регулирует зазор участка упора концевого эффектора 12 относительно цилиндра для скобок. Разнообразные аспекты прошивных/отрезных механизмов с Е-образной поперечиной описаны в патенте США №6978921, «Surgical Stapling Instrument Incorporating An E-Beam Firing Mechanism», изобретателей Шелтона IV с соавторами (Shelton, IV. et al.), соответствующие разделы которых включены в настоящее описание путем отсылки. Однако ниже из настоящего подробного описания специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно эффективное применение других конфигураций ножевых и прошивных/отрезных механизмов без выхода за пределы существа и объема настоящего изобретения.
Для целей настоящего описания термин «прошивной/отрезной механизм» относится к участку или участкам пневмоприводного инструмента и/или концевого эффектора, который перемещается из незадействованного положения, в котором прошивной/отрезной механизм может быть, по существу, неподвижным, в сработавшее или конечное положение, в котором участок или участки перемещены или переставлены в конечное положение, при этом такое его перемещение приводит к исполнению инструментом, по меньшей мере, одного действия в ответ на передачу ему, по меньшей мере, одного прошивного/отрезного движения. Прошивной/отрезной механизм может содержать, например: (i) компоненты, которые полностью установлены на пневмоприводном инструменте и сопрягаются с компонентами в хирургическом устройстве; (ii) комбинацию компонентов, которые расположены на пневмоприводном инструменте и в хирургическом устройстве; или (ii) компоненты, которые установлены на хирургическом устройстве и могут перемещаться в пневмоприводной инструмент и из него. Для целей настоящего описания термин «прошивной ход» относится к фактическому перемещению прошивного/отрезного механизма из незадействованного положения в сработавшее положение. Термин «отводящий ход» относится к возвратному перемещению прошивного/отрезного механизма из сработавшего положения в незадействованное положение.
Как можно видеть на Фиг.2, концевой эффектор 12 содержит дистальный элемент, который, в различных неограничивающих вариантах осуществления, содержит удлиненный желоб 20, который содержит соединенный с ним упор 40 с поворотно-поступательным перемещением. Удлиненный желоб 20 выполнен с возможностью размещения и установки кассеты 50 для скобок, которая реагирует на узел 30 ножа выталкиванием скобок 70 в формирующий контакт с упором 40. Следует понимать, что, хотя в настоящей заявке представлено описание предпочтительно быстросменной кассеты для скобок, кассета для скобок, согласующаяся с аспектами настоящего изобретения, может быть постоянно закрепленной в удлиненном желобе 20 или неразъемной с ним.
В различных вариантах осуществления прошивной/отрезной механизм или узел 30 ножа содержит вертикально разнесенные пальцы, которые регулируют зазор концевого эффектора 12 во время прошивки. В частности, верхние пальцы 32 установлены с возможностью входа в выемку 42 упора вблизи шарнира между упором 40 и удлиненным желобом 20. Смотри Фиг.4. Во время прошивки/отрезания при сомкнутом упоре 40 верхние пальцы 32 выдвигаются в дистальном направлении внутри продольного паза 44 упора, продолжающегося в дистальном направлении через упор 40. Любое незначительное отклонение вверх в упоре 40 преодолевается направленным вниз усилием, оказываемым верхними пальцами 32.
Узел 30 ножа содержит также головку 34 ножевой планки, которая зацепляет вверх желобковый паз 23 (Фиг.2), сформированный в удлиненном желобе 20 и, тем самым, взаимодействует с верхними пальцами 32 для стягивания упора 40 и удлиненного желоба 20 немного ближе между собой в случае зажима между ними лишней ткани. В различных вариантах осуществления узел 30 ножа предпочтительно может содержать средние пальцы 36, которые проходят по прорези привода прошивки/отрезания (непоказанной), сформированной в нижней поверхности кассеты 50 и направленной вверх поверхности удлиненного желоба 20, и, тем самым, приводят в движение находящиеся в нем скобки 70, как описано ниже. Средние пальцы 36, при скольжении относительно удлиненного желоба 20, эффективно препятствуют любой тенденции к защемлению концевого эффектора 12 в сомкнутом состоянии на его дистальном конце. Однако, при применении других конструкций узла ножа, возможно достижение оригинальных и новаторских аспектов в различных вариантах осуществления настоящего изобретения.
Как показано на Фиг.2, дистально направленная режущая кромка 38 между верхними и средними пальцами 32, 36 на узле 30 ножа проходит по проксимально открытой вертикальной прорези 54 в кассете 50 для отрезания зажатой ткани. Жесткое позиционирование узла 30 ножа относительно удлиненного желоба 20 и упора 40 обеспечивает эффективное выполнение разреза. В различных вариантах осуществления нижняя поверхность упора 40 может быть снабжена множеством расположенных в нем скобкоформирующих углублений (непоказанных), которые расположены соответственно напротив множества вырезов 58 под скобки в верхней 56 поверхности кассеты 50 для скобок, когда кассета 50 для скобок установлена внутри удлиненного желоба. В различных вариантах осуществления кассету 50 для скобок можно устанавливать с самофиксацией в удлиненный желоб 20. В частности, удлиненные элементы 60, 62 кассеты 50 для скобок входят во фрикционное и разъемное зацепление с выемками 24, 26 соответственно удлиненного желоба 20.
Как также можно видеть на Фиг.2, кассета 50 для скобок содержит корпус 51 кассеты, клиновидный скользящий блок 64, поводки 66 скобок, скобки 70 и кассетный лоток 68. В собранном состоянии кассетный лоток 68 вмещает клиновидный скользящий блок 64, поводки 66 скобок и скобки 70 внутри корпуса 51 кассеты. Удлиненный желоб 20 связан с узлом 300 рукоятки узлом 100 удлиненного стержня, который содержит дистальную несущую или рамную секцию 110 и проксимальную несущую или рамную секцию 130. Удлиненный желоб 20 содержит проксимально расположенные крепежные гнезда 22, каждое из которых вмещает соответствующий элемент 114 крепления желоба, сформированный на дистальном конце дистальной несущей секции 110. Удлиненный желоб 20 содержит также криволинейные пазы 28 под упор, в которых установлен с возможностью поворота соответствующий палец 43 упора на упоре 40. Узел 170 замыкающей втулки установлен поверх несущего узла 102 и содержит дистальный сегмент 180 замыкающей трубки и проксимальный сегмент 190 замыкающей трубки. Как поясняется ниже, аксиальное перемещение узла 170 замыкающей втулки относительно несущего узла 102 вынуждает упор 40 поворачиваться относительно удлиненного желоба 20.
Как можно видеть на Фиг.2, фиксирующая пружина 112 установлена в дистальном несущем сегменте 110 в качестве блокировки для узла 30 ножа. Дистальный и проксимальный квадратные вырезы 111, 113 сформированы наверху дистального несущего сегмента 110 для образования зажимной перекладины 115 между ними, которая вмещает верхний рычаг 116 фиксирующей пружины 112, чей нижний, дистально продолжающийся рычаг 118 оказывает направленное вниз усилие на дистальный конец узла 501 цилиндра, служащий опорой для участка 35 планки поршня, выступающей из узла 30 ножа, как подробно поясняется ниже. Следует понимать, что различные варианты осуществления могут содержать другие типы блокировок или совсем не содержать блокировок.
В варианте осуществления, представленном на Фиг.1-6, концевой эффектор 12 можно шарнирно поворачивать относительно проксимального сегмента 190 замыкающей трубки (и узла 300 рукоятки) посредством совокупности тросов или лент, которые изгибаются для натягивания концевого эффектора 12 вокруг шарнира 104 сочленения. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что данная конструкция представляет всего одну из множества шарнирно-поворотных конструкций, которые можно применить в связи с устройствами данного типа. В данном варианте осуществления проксимальный конец дистального несущего сегмента 110 содержит на себе выступ 122. Дистальный конец проксимального несущего сегмента 130 снабжен лапкой 134, в которой имеется сквозной вырез 136. Проксимальный несущий сегмент 130 расположен относительно дистального несущего сегмента 110 так, что вырез 136 коаксиально совмещен с вырезом 124 в выступе 122, чтобы ось 138 поворота продолжалась сквозь него. Смотри Фиг.4. Данная конструкция в сборе позволяет концевому эффектору 12 поворачиваться относительно проксимального несущего сегмента 130 вокруг оси A-A поворота.
Как указано выше, в данном варианте осуществления применяются ленты для шарнирного поворота концевого эффектора 12. В частности, ленты 150, 160 могут продолжаться в дистальном направлении к шарниру 104 сочленения, как показано на Фиг.2 и 3. Лента 150 может продолжаться через проксимальный сегмент 190 замыкающей трубки вдоль его левой стороны, где она может быть проложена вокруг ленточного элемента 160 и поперек к правой стороне проксимального сегмента 190 замыкающей трубки. Здесь лента 150 может быть механически соединена с выступом 122, например, в точке 123 соединения. Аналогично, лента 160 может продолжаться через проксимальный сегмент 190 замыкающей трубки вдоль его правой стороны, где она может быть проложена вокруг ленточного элемента 150 и поперек к левой стороне проксимального сегмента 190 замыкающей трубки. Здесь лента 160 может быть механически соединена с выступом 122 в точке 125 соединения.
На Фиг.3 представлен вид сверху концевого эффектора и несущего узла 102 с узлом 100 замыкающей трубки, показанным пунктирными линиями. На Фиг.4 представлен местный вид сбоку в разрезе того же самого участка аппарата 10. Как можно видеть на Фиг.4, ленты 150 и 160 показаны смещенными одна от другой для предотвращения помех перемещению согласно одному неограничивающему варианту осуществления. Например, лента 150 показана в положении ниже ленты 160. В другом неограничивающем варианте осуществления вертикальное расположение лент 150 и 160 можно обратить. Как также видно из Фиг.2 и 3, ленточный элемент 150 продолжается вокруг штифта 140 в участке 134 лапки проксимального рамного сегмента 130. Аналогично лента 160 продолжается вокруг штифта 142 в участке 134 лапки проксимального рамного сегмента 130. Смотри также Фиг.2.
Ленточные участки 150 и 160 могут продолжаться от выступа 122 и вдоль проксимального сегмента 190 замыкающей трубки к устройству 200 управления шарнирным поворотом, показанным на Фиг.5. Устройство 200 управления шарнирным поворотом может содержать ползун 202 шарнирного поворота, рамку 204 и кожух 206. Ленточные участки 150, 160 могут проходить сквозь ползун 202 шарнирного поворота по пазу 208 или другому вырезу, хотя, очевидно, что ленточные участки 150, 160 можно соединять с ползуном 202 любым подходящим средством. Ползун 202 шарнирного поворота может представлять собой одну целую деталь, как показано на Фиг.5, или, в одном неограничивающем варианте осуществления, может содержать две детали с сопряжением между двумя деталями, ограничивающим паз 208. В одном неограничивающем варианте осуществления ползун 202 шарнирного поворота может содержать несколько пазов, где, например, каждый паз соответствует одному из ленточных участков 150, 160. Кожух 206 может закрывать различные компоненты устройства 200 управления для предотвращения попадания мусора.
В различных вариантах осуществления ленточные участки 150, 160 могут быть закреплены к рамке 204 в точках 210, 212 соединения, расположенных проксимально от паза 208. В неограничивающем варианте осуществления, показанном на Фиг.5, показано, что ленточные участки 150, 160 предварительно отогнуты от точек 210, 212 соединения к пазу 208, расположенному вблизи продольной оси проксимального сегмента 190 замыкающей трубки. Следует понимать, что ленточные участки 150, 160 могут быть закреплены в любом другом месте в аппарате 10, расположенном проксимально относительно паза 208, включая узел 300 рукоятки.
Во время применения вариант осуществления, показанный на Фиг.2, может находиться в неповернутом положении, показанном на Фиг.3. Устройство 200 управления шарнирным поворотом и ленты 150, 160 показаны в центральном положении, приблизительно на продольной оси узла 100 стержня. Соответственно, концевой эффектор 12 находится в нейтральном или неповернутом положении. На Фиг.6 устройство 200 управления шарнирным поворотом показано с ползуном 202 шарнирного поворота, передвинутым в рамке шарнирного поворота в правую сторону от узла 100 стержня. Соответственно, ленты 150, 160 изогнуты к правой стороне узла 100 стержня. Можно видеть, что изгиб ленты 150 вправо оказывает поперечно направленное усилие на выступ 122, который смещается от точки поворота выступа 122. Данное смещающее усилие вынуждает выступ 122 поворачиваться вокруг шарнира 104 сочленения, что, в свою очередь, вынуждает концевой эффектор 12 поворачиваться вправо, как показано. Следует понимать, что сдвиг ползуна 202 шарнирного поворота в левую сторону узла 100 стержня может оказывать поперечно направленное усилие на ленты 150, 160 и, тем самым, изгибать обе ленты 150, 160 к левой стороне узла 100 стержня. Тогда изгиб ленты 160 оказывает поперечно направленное усилие на выступ 122, который, как указано выше, смещается от точки поворота выступа 122. Это, в свою очередь, вынуждает выступ 122 поворачиваться вокруг шарнира 104 сочленения, что вынуждает концевой эффектор 12 поворачиваться влево.
В различных вариантах осуществления узел 100 стержня содержит узел 170 замыкающей трубки, который размещен на несущем узле 102. Смотри Фиг.2. Узел 170 замыкающей трубки содержит дистальный сегмент 180 замыкающей трубки и проксимальный сегмент 190 замыкающей трубки. Дистальный сегмент 180 замыкающей трубки и проксимальный сегмент 190 замыкающей трубки могут быть выполнены из полимера или другого подходящего материала. Проксимальный сегмент 190 замыкающей трубки является полым и содержит аксиальный проход 191, продолжающийся через данный сегмент, который выполнен с размером для установки в него участка несущего узла 102.
В варианте осуществления, показанном на Фиг.2 и 4, применено двухшарнирное замыкающее соединение 172. Следует понимать, что изобретение не ограничено конструкцией двухшарнирного замыкающего соединения и может содержать любую подходящую замыкающую трубку или втулку или совсем не содержать замыкающей трубки или втулки. Как конкретно показано на Фиг.4, дистальный сегмент 180 замыкающей трубки содержит верхнюю и нижнюю проксимально выступающие лапки 182, 184. Дистальный сегмент 180 замыкающей трубки дополнительно содержит подковообразный вырез 185 и лапку 186 для зацепления размыкающей/смыкающей лапки 46 упора на упоре 40, чтобы вынуждать упор 40 поворачиваться между разомкнутым и сомкнутым положениями, как дополнительно подробно поясняется ниже. Смотри Фиг.2.
Проксимальный сегмент 190 замыкающей трубки аналогично снабжен дистально продолжающейся верхней лапкой 192 и дистально продолжающейся нижней лапкой 194. Верхнее двухшарнирное соединительное звено 174 содержит выступающие вверх дистальную и проксимальную оси 175, 176 поворота, которые находятся в зацеплении соответственно с верхним дистальным отверстием 183 под ось поворота в верхней проксимально выступающей лапке 182 и верхним проксимальным отверстием 193 под ось поворота в верхней дистально выступающей лапке 192. Конструкция сочленения дополнительно содержит нижнее двухшарнирное соединительное звено 177, которое содержит выступающие вниз дистальную и проксимальную оси 178, 179 поворота (не показанные на Фиг.2, однако показанные на Фиг.4), которые находятся в зацеплении соответственно с нижним дистальным отверстием 187 под ось поворота в нижней проксимально выступающей лапке 184 и нижним проксимальным отверстием 195 под ось поворота в нижней дистально выступающей лапке 194.
Во время применения узел 170 замыкающей трубки поступательно перемещают в дистальном направлении для смыкания упора 40, например, в ответ на приведение в действие замыкающего рычага 310. Упор 40 смыкают поступательным перемещением в дистальном направлении узла 170 замыкающей трубки на несущем узле 102, что вынуждает заднюю сторону подковообразного выступа 185 наталкиваться на размыкающую/смыкающую лапку 46 на упоре 40 и вызывает его поворот в сомкнутое положение. Чтобы разомкнуть упор 40, узел 170 замыкающей трубки аксиально перемещают в проксимальном направлении на несущем узле 102, что вынуждает лапку 186 приходить в контакт и нажимать на размыкающую/смыкающую лапку 46 с поворотом упора 40 в разомкнутое положение.
На Фиг.7 представлен общий вид с пространственным разделением деталей неограничивающего узла 300 рукоятки в соответствии с различными вариантами осуществления настоящего изобретения. В варианте осуществления, показанном на фигуре 7, узел рукоятки имеет конфигурацию «ручки пистолетного типа» и сформирован из правого корпусного элемента 320 и левого корпусного элемента 330, которые отформованы или иначе изготовлены из полимера или другого подходящего материала и предназначены для состыковки. Данные корпусные элементы 320 и 330 можно соединять между собой с помощью защелкивающихся элементов, шпеньков и гнезд, отформованных или иначе сформированных в данных элементах и/или на клею, винтах, болтах, зажимах и т.п. Верхний участок 322 правого корпусного элемента 320 состыковывается с соответствующим верхним участком 323 левого корпусного элемента 330 с формированием основного корпусного участка, обозначенного позицией 340. Аналогично нижний участок 324 ручки правого корпусного элемента 320 состыковывается с нижним участком 334 ручки левого корпусного элемента 330 с формированием участка ручки, обозначенного, в общем, позицией 342. В варианте осуществления, показанном на Фиг.7, участок 342 ручки в целом является неразъемным с основным корпусным участком 340. Данная конструкция может быть, в частности, пригодной для применений, когда источник сжатого газа постоянно установлен в участке 342 ручки. Данная конструкция пригодна также для применения с источниками сжатого газа, которые являются внешними относительно узла 300 рукоятки и подключаются к компонентам управления, вмещенным в него, посредством проходного отверстия или проходных отверстий в корпусном узле. В других вариантах осуществления, как дополнительно подробно поясняется ниже, участок 342 ручки является разъемным с основным корпусным участком 340. Как должно быть очевидно ниже из настоящего подробного описания, данная конструкция дает множество преимуществ и выгод. Однако специалистам со средним уровнем компетентности в данной области техники должно быть совершенно очевидно, что узел 300 рукоятки может иметь множество разных форм и размеров.
Для ясности на Фиг.7 представлены только компоненты, применяемые для управления аксиальным перемещением узла 170 замыкающей трубки, которые, в конечном счете, управляют размыканием и смыканием упора 40. Как можно видеть на данной фигуре, замыкающая возвратно-поступательная муфта 400, которая соединена с замыкающим рычагом 302 узлом 430 рычажной передачи, установлена внутри основного корпусного участка 340. Замыкающая возвратно-поступательная муфта 400 может быть также изготовлена из двух деталей 402, 404, которые отформованы или иначе изготовлены из полимера или другого подходящего материала и предназначены для состыковки. Например, в варианте осуществления, показанном на Фиг.7, правый участок 402 может быть снабжен крепежными столбиками 403, которые предназначены для вмещения в соответствующие гнезда (непоказанные) в левом участке 404. Правый и левый участки 402, 404 могут удерживаться совместно иным способом, защелкивающими элементами и/или клеем, и/или болтами, винтами, зажимами и т.п. Как можно видеть на данной фигуре, в проксимальном конце проксимального сегмента 190 замыкающей трубки выполнена удерживающая канавка 196. Правый участок 402 замыкающей возвратно-поступательной муфты 400 содержит правый удерживающий фланцевый сегмент 405, который выполнен с возможностью взаимодействия с левым удерживающим фланцевым сегментом (непоказанным) на левом участке 404 замыкающей возвратно-поступательной муфты 400 для формирования удерживающего фланцевого узла, который продолжается в удерживающую канавку 196 в проксимальном сегменте 190 замыкающей трубки.
Как также можно видеть на Фиг.7, правый удерживающий шпенек 326 несущего узла выступает внутрь из правого корпусного элемента 320. Данный шпенек 326 выступает в удлиненный паз или окно 406 в правом участке 402 замыкающей возвратно-поступательной муфты 400. Сходный удерживающий шпенек (непоказанный) замыкающей возвратно-поступательной муфты выступает внутрь из левого корпусного элемента 330 для вмещения в другое окно или паз 408, выполненный в левом участке 404 замыкающей возвратно-поступательной муфты 400. Удерживающие шпеньки служат для неподвижной фиксации проксимального конца 133 проксимального несущего сегмента 130 (не показанного на Фиг.7) к узлу 300 рукоятки и одновременно допускают аксиальное перемещение замыкающей возвратно-поступательной муфты 400 относительно него. Удерживающие шпеньки могут быть механически закреплены к проксимальному концу проксимального несущего сегмента 130 посредством, например, болтов, винтов, клея, защелкивающихся элементов и т.п. Кроме того, замыкающая возвратно-поступательная муфта 400 снабжена продолжающимися вбок направляющими ребрами 410, 411. Ребро 410 установлено с возможностью скольжения в направляющую 328 ребра в правом корпусном элементе 320, и ребро 411 установлено с возможностью скольжения в направляющую ребра (непоказанную) в левом корпусном элементе 330.
Аксиальное перемещение замыкающей возвратно-поступательной муфты 400 и узла 170 замыкающей трубки в дистальном направлении (по стрелке «C») создается перемещением замыкающего рычага 302 к участку 342 ручки узла 300 рукоятки, и аксиальное перемещение замыкающей возвратно-поступательной муфты 400 в проксимальном направлении (по стрелке «D») создается перемещением замыкающего рычага 302 от участка 342 ручки. В различных вариантах осуществления замыкающая возвратно-поступательная муфта 400 снабжена соединительной лапкой 412, которая облегчает прикрепление к ней узла 430 замыкающей рычажной передачи. Смотри Фиг.8 и 9. Узел 430 замыкающей рычажной передачи содержит вильчатый участок 432, который шарнирно, с возможностью поворота, присоединен к соединительной лапке 412 штифтом 414. Узел 430 замыкающей рычажной передачи дополнительно содержит замыкающее плечо 434, которое шарнирно, с возможностью поворота, присоединено к узлу 304 вилки, сформированному на замыкающем рычаге 302, замыкающим штифтом 436, как показано на Фиг.7. Замыкающий рычаг 302 установлен с возможностью поворота в узле 300 рукоятки на шарнирном пальце 306, который продолжается между правым корпусным элементом 320 и левым корпусным элементом 330.
Когда врачу требуется сомкнуть упор 40 для зажима ткани в концевом эффекторе 12, врач притягивает замыкающий рычаг 302 к участку 342 ручки. Когда врач подтягивает замыкающий рычаг 302 к участку 342 ручки, узел 430 замыкающей рычажной передачи перемещает замыкающую возвратно-поступательную муфту 400 в дистальном направлении «C», пока узел 430 замыкающей рычажной передачи не переместится в положение фиксации, показанное на Фиг.8. В данном положении узел 430 рычажной передачи будет стремиться удерживать замыкающую возвратно-поступательную муфту 400 в данном положении фиксации. Когда замыкающую возвратно-поступательную муфту 400 перемещают в положение фиксации, узел 170 замыкающей трубки перемещается в дистальном направлении по несущему узлу 102 и, тем самым, приводит размыкающую/смыкающую лапку 46 на упоре 40 в контакт с проксимальным концом подковообразного выреза 185 в дистальном сегменте 180 замыкающей трубки и, тем самым, поворачивает упор 40 в сомкнутое (сжатое) положение.
В различных вариантах осуществления, для дополнительного удерживания замыкающей возвратно-поступательной муфты 400 в сомкнутом положении, замыкающий рычаг 302 может быть снабжен расцепляемым механизмом 301 фиксации, который выполнен с возможностью зацепления за участок 342 рукоятки и удерживания с возможностью отпускания замыкающего рычага 302 в положении фиксации. Можно также применить другие фиксирующие устройства для удерживания с возможностью освобождения замыкающей возвратно-поступательной муфты 400 в положении фиксации. В варианте осуществления, показанном на Фиг.8, 8A, 8B и 9, замыкающий рычаг 302 содержит гибкую продольную консоль 303, которая содержит боковой палец 305, продолжающийся из нее. Консоль 303 и палец 305 могут быть выполнены, например, из формованного пластика. Участок 342 ручки пистолетного типа в узле 300 рукоятки содержит отверстие 350 с поперечно продолжающимся клином 352, расположенным в нем. Когда замыкающий рычаг 302 отводят, палец 305 входит в зацепление с клином 352 и палец 305 прижимается вниз (т.е. консоль 303 поворачивается по часовой стрелке) нижней поверхностью 354 клина 352. Когда палец 305 полностью проходит нижнюю поверхность 354, усилие, действующее по часовой стрелке на консоль 303, снимается и палец 305 поворачивается против часовой стрелки так, что палец 305 приходит в упор в вырез 356 за клином 352 и, тем самым, фиксирует замыкающий рычаг 302. Палец 305 дополнительно удерживается на месте в положении фиксации гибким упором 358, продолжающимся из клина 352.
Для деблокирования замыкающего рычага 302 оператор может дополнительно прижать замыкающий рычаг 302, что приводит палец 305 в зацепление с наклонной задней стенкой 359 отверстия 350 и, тем самым, отжиму пальца 305 вверх за гибкий упор 358. Затем палец 305 высвобождается для выхода по верхнему проходу в отверстии 360 так, что замыкающий рычаг 302 больше не зафиксирован к участку 342 ручки пистолетного типа. Дополнительные сведения о подобной конструкции приведены в заявке на патент США №11/344020, «Surgical Instrument Having A Removable Battery», выданной 31 января 2006 г. изобретателю Шелтону IV с соавторами (Shelton, IV et al.), соответствующие разделы которой включены в настоящую заявку путем отсылки. Возможно также применение других расцепляемых фиксирующих конструкций.
В различных вариантах осуществления настоящего изобретения узел 30 ножа может содержать, по существу, жесткий участок 35 планки поршня, выступающий из него или иначе прикрепленный к нему, который входит в состав элемента 500 привода, который установлен с возможностью функционирования на дистальном несущем сегменте 110 и выполнен с возможностью передачи, по меньшей мере, двух приводящих движений (например, прошивного/отрезного движения и отводящего движения) узлу 30 ножа. В вариантах осуществления, показанных на Фиг.3, 4, 10 и 11, элемент 500 привода содержит узел 501 двухступенчатого пневмоприводного цилиндра. Узел 30 ножа может содержать цельный компонент или может быть выполнен из нескольких деталей для облегчения сборки аппарата 10. Например, как показано на Фиг.10 и 11, узел 30 ножевой планки содержит дистальный участок 31, который содержит верхние пальцы 32, головку 34, средние пальцы 36 и нож 38. Дистальный участок 31 может быть снабжен вырезом 33, выполненным в нем в размер для вмещения выступа 37, обеспеченного на дистальном конце участка 35 планки поршня. Выступ 37 может вмещаться на трении в вырез 33 и/или фиксироваться в нем клеем, сваркой и т.п.
Узел 501 цилиндра содержит первый кожух 510 цилиндра, который имеет первый закрытый проксимальный конец 512 и первый открытый дистальный конец 514, который открыт в первый аксиальный проход 516 в первом 510 кожухе цилиндра. Узел 501 цилиндра содержит также второй кожух 520 цилиндра, который имеет второй проксимальный конец 522 и второй открытый дистальный конец 524, который открыт во второй аксиальный проход 526. Второй закрытый проксимальный конец 522 имеет первую поршневую головку 528, сформированную на нем, которая выполнена в такой размер относительно первого аксиального прохода 516, чтобы создавать, по существу, воздухонепроницаемое скользящее уплотнение к первой стенке 511 первого кожуха 510 цилиндра для образования первой области 515 цилиндра между дистальной стороной первого проксимального конца 512 и проксимальной стороной первой поршневой головки 528. Первый дистальный конец 514 первого кожуха 510 цилиндра дополнительно содержит продолжающийся внутрь первый фланец 517, сформированный на нем для создания, по существу, воздухонепроницаемого скользящего уплотнения к внешней поверхности стенки второго кожуха 520 цилиндра и, тем самым, образования второй области 518 цилиндра между проксимальной стороной первого фланца 517 и дистальной стороной первой поршневой головки 528.
Сквозь первую поршневую головку 528 обеспечен первый проход 527. Как также можно видеть на Фиг.10 и 11, проксимальный конец планки 35 поршня продолжается через второй открытый дистальный конец 524 второго кожуха 520 цилиндра и во второй аксиальный проход 526. Вторая поршневая головка 530 сформирована на проксимальном конце планки 35 поршня или иначе прикреплена к ней. Вторая поршневая головка 530 выполнена в такой размер относительно второго аксиального прохода 526, чтобы создавать, по существу, воздухонепроницаемое скользящее уплотнение ко второй стенке 521 второго кожуха 520 цилиндра для образования третьей области 532 цилиндра. Второй дистальный конец 524 второго кожуха 520 цилиндра дополнительно содержит продолжающийся внутрь второй фланец 525, сформированный на нем для создания, по существу, воздухонепроницаемого скользящего уплотнения к планке 35 поршня и, тем самым, образования четвертой области 534 цилиндра между проксимальной стороной второго фланца 525 и дистальной стороной второй поршневой головки 530.
Как можно видеть на Фиг.3 и 4, узел 501 цилиндра установлен внутри дистального несущего сегмента 110. В различных вариантах осуществления пара качающихся опор 519 выполнена на проксимальном конце первого кожуха 510 цилиндра. Качающиеся опоры 519 вмещены в отверстия 119 под качающиеся опоры в дистальном несущем сегменте 110, чтобы узел 501 цилиндра мог поворачиваться в дистальном несущем сегменте 110 вокруг оси B-B поворота. Смотри Фиг.3. Первая подводящая линия или подводящая трубка 540 продолжается от направляющего распределителя 610 в узле 300 рукоятки (Фиг.8 и 9) через проксимальный сегмент 190 замыкающей трубки для подсоединения к первому проксимальному концу 512 первого кожуха 510 цилиндра, чтобы подводить сжатый газ через первое подводящее проходное отверстие 513 или отверстие в первом проксимальном конце 512 первого кожуха 510 цилиндра. Смотри Фиг.10 и 11. Кроме того, вторая подводящая линия 542 продолжается от направляющего распределителя 610 через проксимальный сегмент 190 замыкающей трубки и подсоединяется к первому кожуху 510 цилиндра вблизи его дистального конца 514 для подведения сжатого газа во вторую область 518 цилиндра через второе проходное отверстие 529.
Ниже, со ссылками на Фиг.8-11, поясняется выдвижение и отведение прошивного/отрезного механизма или узла 30 ножа. Как можно видеть на Фиг.8 и 9, подводящие линии 540 и 542 подсоединены к обычному направляющему распределителю 610, который является частью системы 600 силового привода, вмещенной в корпусе 300 рукоятки. В различных вариантах осуществления направляющий распределитель 610 можно сдвигать вручную между положениями, соответствующими ходу вперед (выдвижение) и ходу назад (отведение), селекторным переключателем 612 или нажимными кнопками, которые доступны через корпус 300 рукоятки. Смотри Фиг.1. В варианте осуществления, показанном на Фиг.8 и 9, применяется сменный источник 620 сжатого газа. Как дополнительно подробно поясняется ниже, данный источник сжатого газа содержит баллон 622, который может быть перезаряжаемым предпочтительным сжатым газом. Однако специалисты со средним уровнем компетентности в данной области техники должны понимать, что возможно также эффективное применение несменных/перезаряжаемых источников (баллонов) со сжатым газом. В других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для подведения сжатого газа из внешнего источника 618 сжатого газа. Например, аппарат 10 может быть подсоединен к больничной сети 618 сжатого воздуха посредством гибкой подводящей линии 617. Смотри Фиг.8B.
Ниже дополнительно подробно поясняются оригинальные и новаторские аспекты сменного/перезаряжаемого баллона 622. Однако с целью объяснения выдвижения и отведения планки 35 поршня и узла 30 ножа показано, что сжатый газ протекает из баллона 622 (или внешнего источника 618 давления) по подводящей линии 650 в привод с регулируемым усилием, который может содержать обычный регулятор 660 расхода. Как, в частности, можно видеть на Фиг.9 и 55, регулятор 660 расхода связан с соединительной тягой 662 питания, которая соединена с рычагом 670 включения. Для целей настоящего описания термин «узел привода с регулируемым усилием» содержит, по меньшей мере, регулятор расхода 660 и рычаг 670 включения и соответствующие эквивалентные конструкции. В различных вариантах осуществления рычаг 670 включения установлен смежно с рычагом 310 прошивки, который соединен с возможностью поворота с узлом 300 рукоятки шарнирным пальцем 370, который продолжается между правым корпусным элементом 320 и левым корпусным элементом 330. Нажим на рычаг 670 включения внутрь к рычагу 310 прошивки вынуждает регулятор 660 расхода увеличивать расход сжатого газа, протекающего из баллона 622 в подводящую линию 680, соединенную с направляющим распределителем 610. В зависимости от положения направляющего распределителя 610 сжатый газ будет протекать в одну из подводящих линий 540 или 542. Например, когда направляющий распределитель 610 включается врачом для приведения в действие узла 30 ножа, сжатый газ получает возможность протекать по подводящей линии 540 в первую область 515 цилиндра через первое отверстие 527 в первой поршневой головке 528 и в третью область 532 цилиндра после приведения в действие рычага 670 включения. Когда сжатый газ поступает в третью область 532 цилиндра, вторая поршневая головка 530 толкает планку 35 поршня в дистальном направлении. Газ, находящийся в четвертой области цилиндра, выпускается из нее через выпускное отверстие 523 во втором кожухе 520 цилиндра. Аналогично газ, содержащийся во второй области 518 цилиндра, получает возможность отведения из нее через второе отверстие 529 во вторую подводящую линию 542. Вторая подводящая линия 542 транспортирует выпущенный газ в направляющий распределитель 610, из которого он, в конечном счете, выпускается. Непрерывная подача сжатого газа в первую область 515 цилиндра и третью область 532 цилиндра вынуждает узел 30 ножа полностью выдвинуться через концевой эффектор 12. Когда узел 30 ножа проходит по концевому эффектору 12, он отрезает зажатую в нем ткань и выталкивает скобки 70 из кассеты 50 для скобок (выталкивает скобки в формирующий контакт с нижней поверхностью упора 40). После того как узел 30 ножа выдвинут в его конечное дистальное положение в концевом эффекторе 12, врач прекращает подачу сжатого газа отпусканием рычага 670 включения.
Для отведения прошивного/отрезного механизма или узла 30 ножа врач вручную перемещает селекторный переключатель 612 или соответствующую кнопку для регулировки направляющего распределителя 610 в положение для отведения и начинает нажимать на рычаг 670 включения, что приводит к протеканию сжатого газа во вторую подводящую линию 542. Газ, протекающий по второй подводящей линии 542, поступает во вторую область 518 цилиндра, что вызывает отведение второго кожуха 520 цилиндра в проксимальном направлении в первый кожух 510 цилиндра. Газ в первой области 515 цилиндра имеет возможность выпуска через первое подводящее отверстие 513 в первую подводящую линию 540. Газ, проходящий по первой подводящей линии 540, входит в направляющий распределитель 610, из которого он выпускается. После того как сжатый газ, поступающий во вторую область 518 цилиндра, вызовет отведение второго кожуха 520 цилиндра в первый кожух 510 цилиндра, как показано на Фиг.10, газ, проходящий через второе отверстие 529, может пройти через выпускное отверстие 523 в первом кожухе 510 цилиндра и в четвертую область 534 цилиндра. Когда сжатый газ поступает в четвертую область 534 цилиндра, вторая поршневая головка 530 подтягивает планку 35 поршня в проксимальном направлении во второй кожух 520 цилиндра. Газ в третьей области 532 цилиндра проходит через первое отверстие 527 в первую область 515 цилиндра, из которой он выпускается вышеописанным образом.
В приводе с регулируемым усилием в форме регулятора 660 расхода согласно различным вариантам осуществления настоящего изобретения могут применяться пружины или другие поджимные средства (непоказанные) для поджима регулятора 660 расхода в невключенное положение. В невключенном положении регулятор 660 расхода может находиться в конфигурации, предотвращающей любой поток газа от источников газа 620 или 618 через дроссельное отверстие (непоказанное) в регуляторе 660. Следовательно, когда рычаг 670 включения находится в невключенном положении, устройство, по существу, выключено.
В вышеописанных вариантах осуществления регулятор 660 расхода может быть механически связан с рычагом 670 включения через соединительную тягу 662 питания так, что, когда врач нажимает на рычаг 670 включения внутрь к рычагу 310 прошивки, соединительная тяга 662 вынуждает регулятор 660 расхода пропускать больший поток газа через регулятор 660. Следовательно, быстрое нажатие на рычаг 670 включения может вызвать увеличение скорости прошивки/отрезания устройством и замедление скорости, с которой нажимают на рычаг 670 включения, замедляет скорость прошивки/отрезания. Следовательно, величина газового потока, пропускаемого через регулятор 660 расхода, может быть, по существу, пропорциональной величине усилия, прилагаемого рукой к рычагу 670 включения.
В других вариантах осуществления регулятор 660 расхода может работать с электронным управлением так, что, при включении рычага включения, регулятор 660 расхода дискретно выпускает струю газа. Регулятор 660 расхода импульсно выпускает небольшое количество газа, и, чем сильнее нажатие на рычаг 670 включения, тем чаще будут следовать импульсы. Данная конструкция служит для селективного регулирования объема газа, используемого для приведения в действие устройства.
Кроме того, в других отличающихся вариантах осуществления приводной механизм может содержать механизм иного типа, который не установлен с возможностью поворота относительно узла рукоятки, как установлен рычаг 670 включения. Например, рычаг включения может содержать пружинный ползунковый переключатель и т.п. Соответственно, защита, допускаемая в данных вариантах осуществления настоящего изобретения, не должна ограничиваться только вариантами осуществления, использующими поворотно-включаемый рычаг.
Кроме того, в различных вариантах осуществления, к подводящей линии 540 может быть пневмогидравлически подсоединен датчик 541 давления, как показано на Фиг.8 и 8A. В соответствующем участке узла 300 рукоятки можно обеспечить окно 543, чтобы врач мог наблюдать датчик 541, или могут быть применены другие конструкции для предоставления врачу возможности наблюдения датчика 541 во время применения. Смотри Фиг.7. В различных вариантах осуществления датчик 541 давления может содержать электронный индикатор или шкальный индикатор. В данных неограничивающих вариантах осуществления датчик 541 обеспечивает средство для обеспечения обратной связи по встречным силам во время прошивного/отрезного хода. Специалисты со средним уровнем компетентности в данной области техники должны понимать, что, в некоторых неограничивающих вариантах осуществления, усилие, необходимое для приведения в движение прошивного/отрезного механизма, прямопропорционально давлению в узле 501 цилиндра. Если данные усилия малы, то узел 501 цилиндра не потребует больших давлений для приведения в действие. С другой стороны, если усилия, необходимые для приведения в действие узла 501 цилиндра, значительны, то в узел 501 цилиндра потребуется выпускать больше газа, чтобы повысить в нем давление для полного срабатывания прошивного/отрезного механизма. Датчик 541 давления служит для снабжения врача показаниями, пропорциональными усилиям, испытываемым концевым эффектором.
В других различных вариантах осуществления в подводящей линии 540 может быть обеспечено выпускное отверстие 545 для звуковой сигнализации, как показано на Фиг.8C. Данное выпускное отверстие для звуковой сигнализации дает выход небольшому количеству газа из подводящей линии 540. Тон издаваемого свистка, вызываемого истечением данного газа, должен повышаться по мере увеличения сил давления. Тогда врач может соотносить тон свистка с усилиями, испытываемыми прошивным/отрезным механизмом. Следовательно, данная конструкция обеспечивает врача звуковым механизмом обратной связи для контроля прошивных/отрезных усилий, испытываемых системой 500 привода и, в конечном счете, прошивным/отрезным механизмом.
Различные неограничивающие варианты осуществления можно также снабдить средством для автоматического извещения врача о том, когда прошивной/отрезной механизм достигает конца прошивного хода. Например, как показано на Фиг.4, в дистальном несущем сегменте 110 можно оборудовать концевой переключатель 546 для обнаружения включающего элемента 547, встроенного в прошивной шток 35 или иначе соединенного с ним, как показано на Фиг.11. Включающий элемент 547 расположен также таким образом, чтобы, когда прошивная планка 35 и прошивной/отрезной механизм достигают конца прошивного хода, включающий элемент 547 обнаруживался концевым переключателем 546, который может электрически соединяться с направляющим распределителем 610 для передачи в него соответствующего сигнала. Направляющий распределитель 610 может быть выполнен с возможностью автоматического переключения, после получения такого сигнала, в положение для отведения и допускает отведение прошивного/отрезного механизма. Кроме того, концевой переключатель 546 может быть связан с индикаторным элементом, обозначенным, в общем, позицией 549 на Фиг.8. В различных вариантах осуществления индикаторный элемент может давать врачу звуковой сигнал, визуальный сигнал или комбинацию звукового и визуального сигналов для указания, что прошивной/отрезной механизм достиг конца прошивного хода. Например, индикаторный элемент может содержать звукогенерирующее устройство, светоизлучающий диод, виброгенерирующее устройство и т.п. или комбинацию таких устройств. Концевой переключатель и соответствующие управляющие компоненты могут работать от аккумуляторной батареи (непоказанной), установленной в корпусном узле 300, или могут получать электропитание от внешнего источника электропитания. Следовательно, различные неограничивающие варианты осуществления настоящего изобретения могут быть снабжены средством для предоставления врачу визуального и/или звукового сигнала, указывающего, что прошивной/отрезной механизм достиг конца прошивного хода, и/или средством для автоматического пневматического отведения прошивного/отрезного механизма в незадействованное положение.
Как можно видеть на Фиг.4, 10 и 11, на нижней стороне планки 35 поршня может быть сформирован фиксирующий выступ 39. Когда узел 30 ножа находится в полностью отведенном положении, как показано на Фиг.4, рычаг 118 фиксирующей пружины 112 прилагает поджимное усилие к дистальному концу узла 501 цилиндра. Поскольку узел 501 цилиндра установлен с возможностью поворота в дистальном несущем сегменте 110 на качающихся опорах 519, то дистальный конец узла 501 цилиндра поворачивается вниз внутри дистального несущего сегмента 110 и дополнительно вынуждает фиксирующий выступ 39 на планке 35 поршня опускаться в фиксирующее отверстие 21 в удлиненном желобе 20. Данная конструкция служит для фиксации узла 30 ножа в отведенном положении за счет фрикционного сцепления фиксирующего выступа 39 с участками удлиненного желоба 20, образующими в нем фиксирующее отверстие. Как можно видеть на Фиг.10 и 11, фиксирующий выступ 39 имеет проксимальную наклонную поверхность 39' и дистальную наклонную поверхность 39” для обеспечения легкого входа и выхода фиксирующего выступа в/из фиксирующего отверстия в удлиненном желобе 20. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно успешное применение других конструкций для фиксации ножевой планки без выхода за пределы существа и объема настоящего изобретения.
На Фиг.12-16A представлен другой вариант осуществления настоящего изобретения, в котором приводной элемент 500 содержит узел 800 цилиндра, который аналогичен по конструкции вышеописанному узлу 501 цилиндра, за исключением нижеописанных различий. Например, в данном варианте осуществления применяются пружины 850, 852 для отведения планки 35 поршня. Как можно видеть на фигурах 12 и 13, узел 800 цилиндра содержит первый кожух 810 цилиндра, который имеет первый закрытый конец 812, и первое подводящее проходное отверстие 813 сквозь него. Первая подводящая линия 840 присоединена к первому закрытому концу 812 для подачи сжатого газа через первое подводящее проходное отверстие 813. В настоящем варианте осуществления первый кожух 810 цилиндра не содержит второго отверстия 529, которое описано в связи с различными вышеописанными вариантами осуществления. Второй кожух 820 цилиндра вмещен с возможностью скольжения в первый кожух 810 цилиндра и имеет второй закрытый проксимальный конец 822, который содержит сформированную на нем первую поршневую головку 828. Первая область 815 цилиндра образована между первым закрытым концом 812 и первой поршневой головкой 828. Первая отводящая пружина 850 обеспечена между первой поршневой головкой 828 и первым фланцем 817, сформированным на дистальном конце первого кожуха 810 цилиндра. Первая отводящая пружина 850 служит для поджима второго кожуха 820 цилиндра в положение отведения в первом кожухе 810 цилиндра, как показано на Фиг.12. Планка 35 поршня имеет ступенчатый конец 35', который выполнен в размер для входа во второй дистальный конец 824 второго кожуха 820 цилиндра. На втором дистальном конце 824 сформирован второй фланец 825 для обеспечения, по существу, скользящего уплотнения к ступенчатому участку 35' планки 35 поршня. На проксимальном конце ступенчатой секции 35' планки поршня обеспечена вторая поршневая головка 830 для образования третьей области 832 цилиндра между второй поршневой головкой 830 и первой поршневой головкой 828. Сквозь первую поршневую головку 828 обеспечено первое отверстие 827, чтобы воздух мог проходить между первой областью 815 цилиндра и третьей областью 832 цилиндра. Между вторым фланцем 825 и второй поршневой головкой 830 обеспечена вторая отводящая пружина 852, как показано на Фиг.12, для поджима второй поршневой головки 830 и ступенчатой планки 35' поршня в полностью отведенное положение во втором кожухе 820 цилиндра, как видно на Фиг.12.
Данный вариант осуществления настоящего изобретения можно приводить в действие следующим образом. Как можно видеть на Фиг.16, узел 300 рукоятки снабжен сменным источником 620 сжатого газа, как описано выше. Однако специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно также эффективное применение несменных источников (баллонов) сжатого газа. Кроме того, в других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для облегчения присоединения направляющего распределителя 610 и соответствующих компонентов к внешнему источнику сжатого газа 618. Смотри Фиг.16A. Например, аппарат 10 можно подсоединять к больничной магистрали сжатого воздуха по гибкой подводящей линии 617.
Для приведения аппарата в действие врач перемещает селекторный переключатель 612 направляющего распределителя (Фиг.1) или нажимные кнопки в положение для хода вперед (выдвижения) и начинает нажимать на рычаг 670 включения, что позволяет сжатому газу протекать из цилиндра 622 (или внешнего источника 618) по подводящей линии 680, через направляющий распределитель 610 и в подводящую линию 840. Сжатый газ протекает из первой подводящей линии 840 через первое подводящее проходное отверстие 813 в первую область 815 цилиндра, через первое отверстие 827 и в третью область 832 цилиндра. Газ, поступающий в третью область 832 цилиндра, вынуждает вторую поршневую головку 830 и ступенчатый участок 35' планки 35 поршня перемещаться в дистальном направлении. После того как вторая поршневая головка 830 переместится в полностью выдвинутое положение (Фиг.13), газ, продолжающий поступать в первую область 815 цилиндра, смещает второй кожух 820 в его полностью выдвинутое положение. Как только узел 30 ножа выдвинется в его крайнее дистальное положение в концевом эффекторе 12, врач прекращает подачу сжатого газа отпусканием рычага 670 включения.
Для отведения прошивного/отрезного механизма или узла 30 ножа врач переводит селекторный переключатель 612 направляющего распределителя в положение заднего хода (отведения), при этом первая подводящая линия 840 подсоединяется к выпускному отверстию в направляющем распределителе 610. Газ в третьей области 832 цилиндра и первой области 815 цилиндра получает возможность выхода через первое подводящее проходное отверстие 813 в подводящую линию 840 и, в конечном счете, выпускается через направляющий распределитель 610. По мере того как газ выходит из третьей области 832 цилиндра, вторая отводящая пружина 852 отводит ступенчатый участок 35' планки 35 поршня во второй кожух 820 цилиндра. Аналогично, по мере того как газ выходит из первой области 815 цилиндра, первая отводящая пружина 850 смещает второй кожух 520 цилиндра в первый кожух 810 цилиндра.
Кроме того, в настоящем варианте осуществления с подводящей линией 840 может быть пневмогидравлически связан датчик 541 давления, как показано на Фиг.16 и 16A, который может действовать аналогично описанному выше случаю и служит для предоставления врачу пропорционального показания усилий, испытываемых концевым эффектором. В других различных вариантах осуществления в подводящей линии 840 может быть оборудовано выпускное отверстие 545 для звуковой сигнализации, как показано на Фиг.16B, которое может функционировать аналогично описанному выше случаю, чтобы обеспечивать врача звуковым механизмом обратной связи для контроля прошивных/отрезных усилий, испытываемых системой 500 привода и, в конечном счете, прошивным/отрезным механизмом. В других альтернативных вариантах осуществления в дистальном несущем сегменте 110 можно оборудовать концевой переключатель 546 (Фиг.15) для обнаружения включающего элемента 547 (Фиг.12 и 13), встроенного в прошивной шток 35 для автоматического управления направляющим распределителем 610 и/или предоставления визуальных и/или звуковых сигналов, указывающих, что прошивной/отрезной механизм достиг конца прошивного хода.
На Фиг.17-21A представлен еще один вариант осуществления настоящего изобретения, на котором элемент 500 привода содержит мембранную коробку 900. Мембранная коробка 900 может иметь дистальный конец 902, который соединен с дистальным участком 31 узла 30 ножевой планки. Дистальный конец 902 содержит сформированный на нем выступ 904, который выполнен в размер для вмещения в вырез 33 в участке 31. Выступ 904 может быть фрикционно установлен в вырезе 33 и/или фиксироваться в нем клеем, сваркой и т.п. Дистальный участок 31 может иметь конструкцию и конфигурацию, аналогичные тем, которые подробно описаны выше.
Мембранная коробка 900 дополнительно содержит расширяемый/сжимаемый мембранный участок 910, который выполнен с размером для выдвижения и втягивания в мембранном проходе 117 в дистальном несущем сегменте, как показано на Фиг.18. Мембранный участок 910 может быть сформирован проволочными ограничивающими кольцами 912, как показано на Фиг.20, и соединен с опорным участком 914, который неподвижно прикреплен к дистальному несущему сегменту 110 или выполнен в виде неразъемного участка дистального несущего сегмента 110. Опорный участок 914 можно крепить к дистальному несущему сегменту 110 клеем, винтами и т.п. Подводящее проходное отверстие 916 выполнено насквозь через опору 914 мембраны, и подводящая линия 940 соединена с подводящим проходным отверстием 916. Подводящая линия 940 связана также с направляющим распределителем 610 в узле 300 рукоятки. Смотри Фиг.21, 21A. Направляющий распределитель 610 сообщается также с вакуумным проходным отверстием 620, оборудованным в узле 300 рукоятки, по вакуумной линии 922. Вакуумное проходное отверстие 620 можно подсоединять к источнику вакуума 630, например, гибкой линией 632. Источник вакуума может представлять собой больничную стационарную линию подведения вакуума. Чтобы врач мог свободно манипулировать аппаратом, гибкую вакуумную линию 632 можно подсоединить от проходного отверстия 620 до источника 630 вакуума.
Данный аппарат можно снабдить вышеописанными конструкциями узла 170 замыкающей трубки и замыкающего рычага 310. Следовательно, ткань можно зажимать в концевом эффекторе 12 описанным выше способом. После того как ткань зажата в концевом эффекторе 12, врач может следующим образом включить аппарат для прошивки. Врач переводит селекторный переключатель 612 (Фиг.1) или кнопки направляющего распределителя 610 в положение для хода вперед (выдвижения) и начинает нажимать на рычаг 670 включения. Когда нажимают рычаг 670 включения, клапан 660 расхода дает сжатому газу возможность протекать из источника 620 сжатого газа (Фиг.21) или 618 (Фиг.21A) к направляющему распределителю 610. Направляющий распределитель 610 дает сжатому газу возможность протекать по подводящей линии 940 в мембрану 910 и, тем самым, вызывает ее выдвижение в дистальном направлении. Когда мембрана 910 выдвигается в дистальном направлении, она приводит в движение узел 30 ножа через концевой эффектор 12 с отрезанием зажатой в нем ткани и выталкиванием скобок 70 из кассеты 50 для скобок в формообразующий контакт с нижней поверхностью упора 40. После перемещения узла 30 ножа в его крайнее дистальное положение в концевом эффекторе 12 врач отпускает рычаг 670 включения. Для отведения узла 30 ножа врач переводит селекторный переключатель 612 направляющего распределителя 610 в положение для отведения, чтобы, тем самым, обеспечить возможность подсоединения источника 630 вакуума к подводящей линии 940. Подача вакуума в подводящую линию 940 вынуждает мембрану 910 сократиться в ее отведенное положение, показанное на Фиг.18. После того как мембрана 910 полностью отведена, врач может перевести селекторный переключатель 612 или кнопки в положение, в котором направляющий распределитель прекращает подачу вакуума в подводящую линию 940. Однако вакуум, остающийся в подводящей линии 940, может служить для удерживания мембраны 910 в отведенном положении.
В варианте осуществления, показанном на Фиг.21, применяется сменный источник 620 сжатого газа. Как дополнительно подробно поясняется ниже, данный источник сжатого газа содержит баллон 622, который может быть перезаряжаемым. Однако специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно также эффективное применение несменных/перезаряжаемых источников (баллонов) со сжатым газом или сжатой текучей средой. В других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для подведения сжатого газа из внешнего источника 618 сжатого газа. Например, аппарат 10 может быть подсоединен к больничной магистрали 618 сжатого воздуха посредством гибкой подводящей линии 617. Смотри Фиг.21A.
Кроме того, в данном варианте осуществления к подводящей линии 940 может быть пневмогидравлически подсоединен датчик 541 давления, как показано на Фиг.21 и 21A, который может функционировать, как описано выше, и служит для предоставления врачу показания, пропорционального усилиям, испытываемым концевым эффектором. В других различных вариантах осуществления в подводящей линии 940 может быть обеспечено выпускное отверстие 545 для звуковой сигнализации, как показано на Фиг.21B, которое может действовать, как описано выше, чтобы обеспечивать врача звуковым механизмом обратной связи для контроля прошивных/отрезных усилий, испытываемых системой 500 привода и, в конечном счете, прошивным/отрезным механизмом. В других альтернативных вариантах осуществления в дистальном несущем сегменте 110 можно оборудовать концевой переключатель 546 (Фиг.18) для обнаружения включающего элемента 912' (Фиг.20) на мембранной коробке 900 и для автоматического управления направляющим распределителем 610 и/или выдачи визуального и/или звукового сигналов, указывающих, что прошивной/отрезной механизм или узел 30 ножа достиг конца прошивного хода.
На Фиг.22-27 изображен нешарнирный одноразовый концевой эффектор 12, в котором применены многие из оригинальных и новаторских признаков вышеописанного варианта осуществления. Как можно видеть на Фиг.23, в данном варианте осуществления может применяться концевой эффектор 12 и любой из элементов 500 привода, которые подробно описаны выше. Однако в данном варианте осуществления концевой эффектор 12 может быть одноразовым и прикрепленным к дистальному узлу 1010 стержня, который может соединяться с возможностью разъема с проксимальным узлом 1020 стержня посредством оригинального и новаторского сочленения быстроразъемного типа, обозначенного, в общем, позицией 1000. После использования концевого эффектора 12 концевой эффектор 12 и дистальный узел 1010 стержня, к котором он крепится, можно отсоединять от проксимального узла 1020 стержня и, при желании, выбрасывать. Затем новый стерильный концевой эффектор 12, в комплекте с его собственным дистальным узлом 1010 стержня и конструкцией цилиндра, можно крепить к проксимальному узлу 1020 стержня для выполнения другой хирургической операции. Как более подробно поясняется ниже, дистальный узел 1010 стержня содержит дистальный несущий сегмент 1110 и дистальный сегмент 1180 замыкающей трубки. Проксимальный узел 1020 стержня содержит проксимальный несущий сегмент 1150, проксимальный сегмент 1190 замыкающей трубки и расцепляющую втулку 1200.
Дистальный несущий сегмент 1110 и проксимальный несущий сегмент 1150 совместно формируют несущий узел 1030. В данном варианте осуществления дистальный несущий сегмент 1110 может быть, по существу, идентичным дистальному несущему сегменту 110, подробно описанному выше, за исключением того, что различаются их соответствующие проксимальные концы. Аналогично проксимальный несущий сегмент 1150 может быть, по существу, идентичным проксимальному несущему сегменту 130, описанному выше, за исключением того, что различаются их соответствующие дистальные концы, чтобы дистальный несущий сегмент 1110 и проксимальный несущий сегмент 1150 можно было неповоротно соединять между собой. Кроме того, в данном варианте осуществления дистальный сегмент 1180 замыкающей трубки может быть, по существу, идентичным дистальному сегменту 180 замыкающей трубки, описанному выше, за исключением того, что различаются их проксимальные концы. Аналогично, проксимальный сегмент 1190 замыкающей трубки может быть, по существу, идентичным проксимальному сегменту 190 замыкающей трубки, за исключением того, что различаются их дистальные концы, чтобы дистальный сегмент 1180 замыкающей трубки и проксимальный сегмент 1190 замыкающей трубки можно было неповоротно соединять между собой.
Как можно видеть на Фиг.23, в дистальном несущем сегменте 1110 установлена фиксирующая пружина 112 для блокировки планки 35 поршня. В верхней части дистальной несущей секции 1110 сформированы дистальный и проксимальный квадратные вырезы 1111, 1113 для образования между ними зажимной перекладины 1115, которая вмещает верхнее плечо 116 фиксирующей пружины 112, чье нижнее, дистально продолженное плечо 118 оказывает направленное вниз усилие на дистальный конец узла цилиндра, как пояснялось выше. Следует понимать, что различные варианты осуществления могут содержать блокировки других типов или быть совсем без блокировок.
Проксимальный конец 1114 дистального несущего сегмента 1110 содержит сформированный в нем дистальный соединительный участок 1116. Смотри Фиг.24 и 27. Как можно видеть на Фиг.24, дистальный соединительный участок 1116 содержит первое дистальное подводящее проходное отверстие 1117, которое соединено с сегментом 540' первой подводящей линии. Второе дистальное подводящее проходное отверстие 1120 обеспечено в дистальном соединительном участке 1116 и соединено с сегментом 542' второй подводящей линии. Как можно видеть на Фиг.23, сегмент 540' первой подводящей линии соединен с первым подводящим проходным отверстием 513 в первом кожухе 510 цилиндра, и сегмент 542' второй подводящей линии соединен со вторым подводящим проходным отверстием 529 в дистальном конце первого кожуха 510. Первый участок 1118 подводящего штуцера выступает в проксимальном направлении из первого дистального подводящего проходного отверстия 1117, как показано. Второй участок 1122 подводящего штуцера выступает наружу в проксимальном направлении из второго дистального подводящего проходного отверстия 1120.
Аналогично дистальный конец 1152 проксимального несущего сегмента 1150 содержит второй соединительный участок 1154, который имеет первое проксимальное подводящее проходное отверстие 1156, которое соединено с другим сегментом 540” первой подводящей линии. Второй соединительный участок 1154 дополнительно содержит выполненное в нем второе проксимальное подводящее проходное отверстие 1160, которое соединено с другим сегментом 542” второй подводящей линии. Первое проксимальное подводящее проходное отверстие 1156 выполнено с возможностью разъемного вмещения в нем первого подводящего штуцера 1118 (Фиг.27), и второе проксимальное подводящее проходное отверстие 1160 выполнено с размером для съемного вмещения в нем второго подводящего штуцера 1122. Как можно видеть на Фиг.24 и 27, первое уплотнительное кольцо 1158 связано с первым проксимальным подводящим проходным отверстием 1156 для формирования, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 540' первой подводящей линии и другим сегментом 540” первой подводящей линии, когда первый штуцер 1118 вставлен в первое проксимальное подводящее проходное отверстие 1156. При соединении описанным образом сегменты 540' и 540” первой подводящей линии сочленены с формированием первой подводящей линии 540. Аналогично второе уплотнительное кольцо 1162 связано со вторым проксимальным подводящим проходным отверстием 1160 для формирования другого, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 542' второй подводящей линии и другим сегментом 542” второй подводящей линии, когда второй подводящий штуцер 1122 вставлен во второе проксимальное подводящее проходное отверстие 1160. При соединении описанным образом сегменты 542' и 542” второй подводящей линии формируют вторую подводящую линию 542. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что возможно применение других разъемных соединительных конструкций, быстроразъемных конструкций для разъемного соединения сегмента 540' первой подводящей линии с другим сегментом 540” первой подводящей линии и сегмента 542' второй подводящей линии с другим сегментом 542” второй подводящей линии без выхода за пределы существа и объема настоящего изобретения.
Дистальный соединительный участок 1116 и проксимальный соединительный участок 1154 могут быть выполнены так, что их можно соединять только при одной ориентации. Например, как показано на Фиг.24, дистальный соединительный участок 1116 может быть снабжен вырезанным участком 1119, который выполнен с возможностью стыковки с другим вырезанным участком 1155 в проксимальном соединительном участке 1154 для обеспечения входа первого штуцера 1118 в зацепление с первым проксимальным подводящим проходным отверстием 1156 и второго штуцера 1122 в зацепление со вторым проксимальным подводящим проходным отверстием 1160 во время монтажа. Описанная оригинальная и новаторская соединительная конструкция предотвращает случайное соединение первого штуцера 1118 со вторым проксимальным подводящим проходным отверстием 1160 и второго штуцера 112 с первым проксимальным подводящим проходным отверстием 1156. Возможно применение других конфигураций наподобие шпонок для обеспечения правильной ориентации при соединении дистального соединительного участка 1116 и проксимального соединительного участка 1154.
Как также можно видеть на Фиг.24 и 27, дистальный конец 1152 проксимального несущего сегмента 1150 содержит участок 1170 полой втулки, который выступает в дистальном направлении. Данный участок 1170 полой втулки выполнен в размер для вмещения в него проксимального конца 1114 дистального несущего сегмента 1110. Для разъемной фиксации дистального несущего сегмента 1110 к проксимальному несущему сегменту 1150 на проксимальном конце 1114 дистального несущего сегмента 1110 сформирована пара противостоящих фиксирующих элементов 1124. Фиксаторы 1124 расположены на гибких лапках 1126, вырезанных или иначе сформированных в дистальном несущем сегменте 1110, чтобы, когда проксимальный конец 1114 дистального несущего сегмента 1110 вставляют в участок 1170 полой втулки проксимального несущего сегмента 1150 и первый штуцер 1118 присоединяют с уплотнением к первому проксимальному подводящему проходному отверстию 1156, а второй штуцер 1122 присоединяют с уплотнением ко второму проксимальному подводящему проходному отверстию 1160, фиксирующие элементы 1124 вмещались в соответствующие отверстия 1172 в участке 1170 полой втулки. Смотри Фиг.24 и 27.
Описание разъемного соединения дистального сегмента 1180 замыкающей трубки с проксимальным сегментом 1190 замыкающей трубки приведено ниже со ссылками на Фиг.24-27. Как можно видеть на данных фигурах, проксимальный конец 1182 дистального сегмента 1180 замыкающей трубки содержит, по меньшей мере, две фиксирующих лапки 1184 байонетного типа, выступающих из него в проксимальном направлении. Каждая фиксирующая лапка 1184 содержит сформированный на ней скошенный фиксирующий клин 1186, который выполнен в размер для вмещения в соответствующие фиксирующие отверстия 1194 в проксимальном сегменте 1190 замыкающей трубки. В положении, показанном на Фиг.26 и 27, дистальный несущий сегмент 1110 зафиксирован к проксимальному несущему сегменту 1150 с формированием несущего узла 1030 и дистальный сегмент 1180 замыкающей трубки зафиксирован к проксимальному сегменту 1190 замыкающей трубки с формированием узла 1178 замыкающей трубки. Данная конструкция допускает перемещение узла 1178 замыкающей трубки в проксимальном направлении и дистальном направлении на несущем узле 1030 для размыкания и смыкания упора 40 на концевом эффекторе 12 в соответствии с различными вышеописанными способами.
Для присоединения дистального узла 1010 стержня к проксимальному узлу 1020 стержня пользователь совмещает проксимальный конец 1012 дистального узла 1010 стержня с дистальным концом 1022 проксимального узла 1020 стержня, как показано на Фиг.24, и затем вставляет дистальный конец 1012 в проксимальный конец 1022. Когда фиксаторы 1124 вмещены в фиксирующие отверстия 1172 и фиксирующие клинья 1186 вмещены в отверстия 1194, дистальный узел 1010 стержня зафиксирован к проксимальному узлу 1020 стержня. Упор 40 можно смыкать перемещением узла 1178 замыкающей трубки в дистальном направлении путем захвата замыкающего рычага 310 и его поворота к участку 342 ручки узла 300 рукоятки, как описано выше. Ножевую планку 30 можно приводить в движение приведением в действие рычага 670 включения, как описано выше.
Для создания возможности удобного отсоединения дистального узла 1010 стержня от проксимального узла 1020 стержня в различных вариантах осуществления применяют конструкцию расцепляющей втулки. В данных вариантах осуществления сегмент 1200 расцепляющей втулки установлен с возможностью скольжения поверх проксимального несущего сегмента 1150 между проксимальным несущим сегментом 1150 и проксимальным сегментом 1190 замыкающей трубки. В различных вариантах осуществления проксимальный конец расцепляющей втулки 1200 может быть снабжен деблокирующей кнопкой 1204, которая выступает сквозь соответствующую прорезь 1196 в проксимальном конце 1195 проксимального сегмента 1190 замыкающей трубки. Смотри Фиг.22 и 31. Данная конструкция допускает аксиальное перемещение расцепляющей втулки 1200 в дистальном и проксимальном направлениях на проксимальном несущем сегменте 1150 без помех для осевого движения проксимального сегмента 1190 замыкающей трубки по несущему узлу 1030.
Как, в частности, можно видеть на Фиг.27, дистальный конец 1202 расцепляющей втулки 1200 скошен внутрь и ориентирован так, что он находится рядом с двумя фиксирующими отверстиями 1194 замыкающей трубки в проксимальном сегменте 1190 замыкающей трубки. Для расцепления дистального узла 1010 стержня от проксимального узла 1020 стержня пользователь сдвигает деблокирующую кнопку в дистальном направлении в прорези 1196 для перемещения расцепляющей втулки 1200 в дистальном направлении. Когда скошенный дистальный конец 1204 расцепляющей втулки 1200 контактирует с фиксирующими клиньями 1186, фиксирующие клинья 1186 перемещаются внутрь из зацепления с фиксирующими отверстиями 1194 в проксимальном сегменте 1190 замыкающей трубки. Дальнейшее перемещение расцепляющей втулки 1200 в дистальном направлении приводит вторую скошенную внутреннюю кромку 1206 в расцепляющей втулке 1200 в контакт с запорными фиксаторами 1124 и, тем самым, смещает их внутрь из зацепления с отверстиями 1172 в проксимальном несущем сегменте 1150, что дает возможность отсоединить дистальный узел 1010 стержня от проксимального несущего узла 1020.
Вариант осуществления, изображенный на Фиг.22-28, можно эффективно применять с узлом 501 цилиндра такого типа, который описан выше. Вариант осуществления, изображенный на Фиг.29 и 30, можно эффективно применять с узлом 800 цилиндра или мембранной коробкой 900, описанными выше. Как можно видеть на Фиг.29 и 30, дистальный соединительный участок 1116 содержит только одно сформированное в нем проходное отверстие 1300, которое соединено с сегментом 940' подводящей линии. Первый подводящий штуцер 1302 выступает в проксимальном направлении из первого дистального подводящего проходного отверстия 1300, как показано. Аналогично соединительный участок 1154 содержит только одно проксимальное подводящее проходное отверстие 1306, которое соединено с другим сегментом 940” первой подводящей линии. Подводящее проходное отверстие 1306 выполнено с возможностью разъемного вмещения в нем первого подводящего штуцера 1302. Как можно видеть на Фиг.29 и 30, с проксимальным подводящим проходным отверстием связано уплотнительное кольцо 1308 для формирования, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучей среды) между сегментом 940' первой подводящей линии и другим сегментом 940” первой подводящей линии, когда подводящий штуцер 1302 вставлен в проксимальное подводящее проходное отверстие 1306. При соединении вышеописанным образом сегменты 940' и 940” первой подводящей линии соединяются с формированием первой подводящей линии 940. После этого подводящая линия 940 может подводить сжатый газ в узел 800 цилиндра или мембранную коробку 900 вышеописанными способами.
На Фиг.32 изображен альтернативный шарнирно поворачиваемый хирургический отрезной и сшивающий скобками аппарат 2000, который содержит узел 2002 пневмоприводного шарнирно-поворотного сочленения, которое можно применять в связи с вышеописанными концевым эффектором 12 и узлом 170 замыкающей трубки. В данном варианте осуществления можно также применять вышеописанный узел 501 цилиндра. Как можно видеть на Фиг.33-35, узел 2002 сочленения содержит несущий узел 2004, который содержит дистальный несущий сегмент 2010, содержащий поворотный элемент 2014, выступающий из его проксимального конца 2012. Поворотный элемент 2014 содержит выступающий из него приводной гребень 2016. Как показано на Фиг.35, узел 501 цилиндра установлен с возможностью поворота в дистальном несущем сегменте 2010 на качающихся опорах 519.
Поворотный элемент 2014 вмещен с возможностью поворота в гнездо 2034 шарнира, сформированное на дистальном конце 2032 проксимального несущего сегмента 2030. Поворотный элемент 2014 может свободно поворачиваться относительно проксимального несущего элемента 2030 вокруг оси E-E поворота. Смотри Фиг.36. Как можно видеть на Фиг.35, дистальный конец 2032 проксимального несущего сегмента 2030 содержит канавку 2036, сформированную в нем для вмещения участка первой подводящей линии 540. Аналогично в дистальном конце 2032 проксимального несущего сегмента 2030 обеспечена вторая канавка 2038 для вмещения в ней второй подводящей линии 542. Подводящие линии 540, 542 проходят вокруг гнезда 2034 шарнира и в проксимальный конец 2012 дистального несущего сегмента 2010, в котором они присоединены к узлу 501 цилиндра различными вышеописанными способами. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что в подводящих линиях 540 и 542 внутри полого проксимального несущего сегмента 2030 может быть обеспечена достаточная слабина, чтобы дистальный несущий сегмент 2010 мог свободно поворачиваться вокруг оси E-E поворота относительно проксимального несущего сегмента 2030. При установке подводящих линий 540, 542 в канавках 2036, 2038 соответственно данные подводящие линии не будут мешать аксиальному перемещению узла 170 замыкающей трубки относительно несущего узла 2004.
Как можно видеть также на Фиг.35, первый вертикальный подводящий канал 2040 выполнен сообщающимся с гнездом 2034 шарнира. Аналогично второй вертикальный подводящий канал 2050 также выполнен сообщающимся с гнездом 2034 шарнира, как показано на Фиг.35. Третья подводящая линия 2042, продолжающаяся от переключающего узла 2100, установленного в узле 300 рукоятки, сообщается с первым вертикальным подводящим каналом 2040, и четвертая подводящая линия 2052, продолжающаяся от переключающего узла 2100, сообщается со вторым вертикальным каналом 2050. Для сборки узла 2002 сочленения поворотный элемент 2014 вставляют в гнездо 2034 шарнира и крышку 2060 крепят к проксимальному несущему сегменту 2030, как показано, винтами 2062 или другими подходящими крепежными элементами. Следовательно, сжатый газ, поступающий в первый вертикальный подводящий канал 2040 из третьей подводящей линии 2042, будет вызывать поворот дистального несущего сегмента 2010 вокруг оси E-E поворота в направлении «F», и сжатый газ, поступающий во второй вертикальный подводящий канал 2050 из четвертой подводящей линии 2052, будет вызывать поворот дистального несущего сегмента 2010 относительно проксимального несущего сегмента 2030 вокруг оси E-E поворота в направлении «G». Смотри Фиг.34.
Ниже, со ссылкой на Фиг.37-45, поясняются конструкция и работа переключающего узла 2100 в различных вариантах осуществления. В различных неограничивающих вариантах осуществления переключающий узел 2100 содержит блок 2110 переключателя, в котором содержится подводящее проходное отверстие 2112. Подводящее проходное отверстие 2112 соединено с подводящей линией 651 для получения сжатого газа из источника сжатого газа 620 (Фиг.44) или 618 (Фиг.45). В частности, подводящая линия 651 может продолжаться от подводящей линии 650 к проходному отверстию 2112. В блоке 2110 переключателя обеспечена полость 2114 переключателя, выполненная в размер для вмещения с возможностью поворота в ней центрального участка 2150 корпуса узла 2130 элемента переключения. Шарнирный стержень 2151 выступает из нижней поверхности центрального участка 2150 корпуса для установки с возможностью поворота в шарнирное отверстие 2111 в блоке 2110 переключателя. Смотри Фиг.39. Данная конструкция позволяет узлу 2130 элемента переключения селективно поворачиваться вокруг оси H-H переключателя. Смотри Фиг.38. Пара уплотнительных колец 2152, 2154 или других подходящих уплотняющих элементов может быть обеспечена, как показано на Фиг.38 и 39, для создания, по существу, воздухонепроницаемого уплотнения между центральным участком 2150 корпуса узла 2130 элемента переключения и блоком 2110 переключателя. Шток 2156 выступает из центрального участка 2150 корпуса для вмещения головки 2158 переключения. Поворот головки 2158 переключения вынуждает центральный участок 2150 корпуса поворачиваться в полости 2114 переключателя. Как можно видеть на Фиг.39, подводящее проходное отверстие 2112 сообщается с подводящим каналом 2116 в блоке 2110 переключателя, который сообщается с областью 2118 распределения, также сформированной в блоке 2110 переключателя.
Центральный участок 2150 корпуса узла 2130 элемента переключения содержит проходящее сквозь него центральное подводящее проходное отверстие 2160, которое сообщается с областью 2118 распределения. В блоке 2110 переключателя обеспечен третий подводящий канал 2045. Смотри Фиг.40. Третий подводящий канал 2045 продолжается между полостью 2114 переключателя и третьим подводящим проходным отверстием 2044, к которому подсоединена третья подводящая линия 2042. Аналогично в блоке 2110 переключателя обеспечен четвертый подводящий канал 2055, который продолжается между полостью 2114 переключателя и четвертым подводящим проходным отверстием 2054, к которому подсоединена четвертая подводящая линия 2052. Когда узел 2130 элемента переключения расположен, как показано на Фиг.40, сжатый газ, поступающий в блок 2110 переключателя через подводящее проходное отверстие 2112 в подводящий канал 2116, проходит в область 2118 распределения и может протекать в центральный подводящий канал 2160. Однако сжатый газ будет перекрываться в конце центрального подводящего канала 2160. Следовательно, на Фиг.40 переключатель показан в выключенном положении.
Для поворота дистального несущего сегмента 2010 вправо (противоположно положению, показанному на Фиг.34) узел 2130 элемента переключения поворачивают в положение, показанное на Фиг.41. Как можно видеть на данной фигуре, сжатый газ, поступающий в блок 2110 переключателя через подводящее проходное отверстие 2112, через подводящий канал 2116 и в область 2118 распределения, пропускается через центральное подводящее проходное отверстие 2160 в третий подводящий канал 2045 и в третью подводящую линию 2042. Затем сжатый газ протекает в первый вертикальный подводящий канал 2040 и контактирует с приводным гребнем 2016 на поворотном элементе 2014 для проталкивания поворотного элемента 2014 в направлении «F». Сжатый газ на противоположной стороне приводного гребня 2016 поступает во второй вертикальный канал 2050 и протекает в четвертую подводящую линию 2052. Когда сжатый газ поступает в четвертое проходное отверстие 2054 в блоке 2110 переключателя, он протекает в четвертый подводящий канал 2055 и в четвертый выпускной канал 2170 в центральном участке 2150 корпуса. Четвертый выпускной канал 2170 сообщается с вырезанной выпускной областью 2155 в центральном участке 2150 корпуса узла 2130 элемента переключения. Смотри Фиг.43. Следовательно, сжатый газ из четвертой подводящей линии 2052 выпускается через четвертый выпускной канал 2170 и из переключателя через вырезанную выпускную область 2155.
Для поворота дистального несущего сегмента 2010 в положение, показанное на Фиг.34, врач поворачивает узел 2130 элемента переключения так, чтобы центральный подводящий канал 2160 продолжался между областью 2118 распределения и четвертым подводящим каналом 2055. Следовательно, сжатый газ, протекающий из подводящей линии 651 в подводящий канал 2116 и в область 2118 распределения, протекает через центральный подводящий канал 2160 в четвертый подводящий канал 2055. Сжатый газ вытекает через четвертое подводящее проходное отверстие 2054 и в четвертую подводящую линию 2052. Четвертая подводящая линия 2052 пропускает сжатый газ во второй вертикальный подводящий канал 2050. Когда сжатый газ поступает во второй вертикальный подводящий канал 2050, приводной гребень 2016 поворачивает поворотный элемент 2014 в направлении «G». Смотри Фиг.34. Газ на противоположной стороне приводного гребня 2016 протекает через первый вертикальный подводящий канал 2040 и в третью подводящую линию 2042. Газ выходит из третьей подводящей линии 2042 в третий подводящий канал 2045 и протекает в третий выпускной канал 2180, выполненный в центральном участке 2150 корпуса. Третий выпускной канал 2180 ориентирован для выпуска газа через вырезанную выпускную область 2155.
Другим оригинальным и новаторским признаком данного варианта осуществления является конструкция автоматического устройства промежуточного положения, которое дает врачу возможность фиксировать дистальный несущий участок 2010 (и концевой эффектор 12) в требуемом положении шарнирного поворота просто отпусканием головки 2158 селекторного переключателя. В частности, возвратная пружина 2190, выполненная показанным способом, установлена в блоке 2110 переключателя, как показано на Фиг.40, 41 и 43. Для удерживания пружины 2190 в блоке 2110 переключателя, из нижней поверхности 2113 блока 2110 переключателя выступает пара противоположных выступов 2192, 2194. Пружина 2190 удерживается внутри пазов 2193, 2195 в выступах 2192, 2194 соответственно. Смотри Фиг.43. Как можно видеть на Фиг.43, из центрального участка 2150 корпуса узла 2130 элемента переключения выступает возвратный стержень 2153. Возвратный стержень 2153 вмещается между свободными концами 2196, 2198 возвратной пружины 2190. На Фиг.43 центральный участок 2150 корпуса показан в промежуточном или закрытом положении.
Следовательно, когда врач намерен шарнирно повернуть концевой эффектор 12, он поворачивает головку 2158 переключения для перемещения центрального участка 2150 корпуса узла 2130 элемента переключения в направлении поворота, соответствующем искомому шарнирно-поворотному ходу. Когда врач поворачивает центральный участок 2150 корпуса, он поворачивает его против усилия, развиваемого одним из свободных концов 2196, 2198 возвратной пружины 2190. После того как врач шарнирно повернет концевой эффектор 12 в искомое положение, он отпускает головку 2158 переключения и возвратная пружина 2190 перемещает центральный участок 2150 корпуса в закрытое положение, вследствие чего концевой эффектор 12 удерживается в данном положении. Если врач намерен отрегулировать положение шарнирного поворота концевого эффектора 12, он просто поворачивает головку 2158 переключения в искомое положение для достижения искомого положения и затем отпускает головку 2158 для удерживания концевого эффектора 12 в данном положении.
На Фиг.44 представлена конструкция компонентов системы управления, применяемых в связи с переключателем 2100 для различных неограничивающих вариантов осуществления настоящего изобретения. Как можно видеть на данной фигуре, применяется сменный источник 620 сжатого газа. Газ, вытекающий из источника 620, протекает по подводящей линии 650 в регулятор 660 расхода и по подводящей линии 651 в проходное отверстие 2112 в переключающем узле 2100. В вариантах осуществления, показанных на Фиг.44, источник 620 содержит сменный/перезаряжаемый баллон 622, который установлен в участке 342 ручки корпусного узла 300. Баллон 622 может быть перезаряжаемым. Однако специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно также эффективное применение несменных/перезаряжаемых источников (баллонов) сжатого газа. В других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для подведения сжатого газа от внешнего источника 618 сжатого газа. Например, аппарат можно подсоединять к больничной магистрали сжатого воздуха (непоказанной) гибкой подводящей линией 617. Смотри Фиг.45.
На Фиг.46-48 показано применение конструкции узла 2002 шарнирно-поворотного сочленения в связи с быстроразъемным соединением 1000' такого типа и с такой конструкцией, которые описаны выше. Однако в данной конструкции применено всего четыре проходных отверстия. Как можно видеть на Фиг.47, дистальный соединительный участок 1116 содержит первое дистальное подводящее проходное отверстие 1117, которое соединено с сегментом 540' первой подводящей линии. Второе дистальное подводящее проходное отверстие 1120 обеспечено в дистальном соединительном участке 1116 и соединено с сегментом 542' второй подводящей линии. Первый участок 1118 подводящего штуцера выступает в проксимальном направлении из первого дистального подводящего проходного отверстия 1117, как показано. Второй участок 1122 подводящего штуцера выступает наружу в проксимальном направлении из второго дистального подводящего проходного отверстия 1120.
Дистальный соединительный участок 1116 дополнительно содержит третье дистальное подводящее проходное отверстие 1117', которое соединено с сегментом 2042' третьей подводящей линии. Четвертое дистальное подводящее проходное отверстие 1120' обеспечено в дистальном соединительном участке 1116 и соединено с сегментом 2052' четвертой подводящей линии. Третий участок 1118' подводящего штуцера выступает в проксимальном направлении из третьего дистального подводящего проходного отверстия 1117', как показано. Четвертый участок 1122' подводящего штуцера выступает наружу в проксимальном направлении из четвертого подводящего проходного отверстия 1120'.
Аналогично дистальный конец 1152 проксимального несущего сегмента 1150 содержит второй соединительный участок 1154, который имеет первое проксимальное подводящее проходное отверстие 1156, которое соединено с другим сегментом 540” первой подводящей линии. Второй соединительный участок 1154 дополнительно содержит выполненное в нем второе проксимальное подводящее проходное отверстие 1160, которое соединено с другим сегментом 542” второй подводящей линии. Первое проксимальное подводящее проходное отверстие 1156 выполнено с возможностью разъемного вмещения в нем первого подводящего штуцера 1118, и второе проксимальное подводящее проходное отверстие 1160 выполнено с размером для съемного вмещения в нем второго подводящего штуцера 1122. Как можно видеть на Фиг.47, первое уплотнительное кольцо 1158 связано с первым проксимальным подводящим проходным отверстием 1156 для формирования, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 540' первой подводящей линии и другим сегментом 540” первой подводящей линии, когда первый штуцер 1118 вставлен в первое проксимальное подводящее проходное отверстие 1156. При соединении описанным образом сегменты 540' и 540” первой подводящей линии сочленены с формированием первой подводящей линии 540. Аналогично второе уплотнительное кольцо 1162 связано со вторым проксимальным подводящим проходным отверстием 1160 для формирования другого, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 542' второй подводящей линии и другим сегментом 542” второй подводящей линии, когда второй подводящий штуцер 1122 вставляют во второе проксимальное подводящее проходное отверстие 1160. При соединении описанным образом сегменты 542' и 542” второй подводящей линии формируют вторую подводящую линию 542.
Кроме того, дистальный конец 1152 проксимального несущего сегмента 1150 содержит второй соединительный участок 1154, который имеет третье проксимальное подводящее проходное отверстие 1156', которое соединено с другим сегментом 2042” третьей подводящей линии. Второй соединительный участок 1154 дополнительно содержит выполненное в нем четвертое проксимальное подводящее проходное отверстие 1160', которое соединено с другим сегментом 2052” четвертой подводящей линии. Третье проксимальное подводящее проходное отверстие 1156' выполнено с возможностью разъемного вмещения в нем третьего подводящего штуцера 1118', и четвертое проксимальное подводящее проходное отверстие 1160' выполнено с размером для съемного вмещения в нем четвертого подводящего штуцера 1122'. Как можно видеть на Фиг.47, третье уплотнительное кольцо 1158' связано с третьим проксимальным подводящим проходным отверстием 1156' для формирования, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 2042' третьей подводящей линии и другим сегментом 2042” третьей подводящей линии, когда третий штуцер 1118' вставлен в третье проксимальное подводящее проходное отверстие 1156'. При соединении описанным образом сегменты 2042' и 2042” третьей подводящей линии сочленены с формированием третьей подводящей линии 2042. Аналогично четвертое уплотнительное кольцо 1162' связано с четвертым проксимальным подводящим проходным отверстием 1160' для формирования другого, по существу, воздухонепроницаемого уплотнения (или непроницаемого для текучих сред) между сегментом 2052' четвертой подводящей линии и другим сегментом 2052” четвертой подводящей линии, когда четвертый подводящий штуцер 1122' вставлен в четвертое проксимальное подводящее проходное отверстие 1160'. При соединении описанным образом, сегменты 2052' и 2052” четвертой подводящей линии формируют четвертую подводящую линию 2052. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что возможно применение других разъемных соединительных конструкций, быстроразъемных конструкций для разъемного соединения без выхода за пределы существа и объема настоящего изобретения.
Как указано выше в разделе «Уровень техники» настоящего описания, по мере того как системы эндоскопических режущих инструментов типа endocutter становятся все меньше, потребность в разработке пневмоприводных систем, которые могли бы развивать необходимые приводные усилия, становится все настоятельнее. Данные проблемы было бы в какой-то степени легче решать с помощью электродвигателей для привода вращательных ведущих валиков. Вращательное движение можно легко передавать длинными гибкими или шарнирно-поворотными ведущими валиками. Несмотря на огромный прогресс в развитии возможностей электродвигателей в части их размеров и вращательных моментов, эффективность данных систем будет ограничиваться размером диаметра дистального удлиненного стержня и размером электродвигателя, который можно установить в данной области, так как электродвигатель должен быть как можно ближе к сшивающему скобками механизму. Во многих современных применениях требуемый размер диаметра стержня не допускает размещения электродвигателя на дистальном конце системы, несмотря на его способность обеспечивать достаточную мощность для приведения системы в действие.
Нижеследующие варианты осуществления направлены на устранение таких проблем и недостатков, которые связаны с применением электроприводных двигателей. Как поясняется ниже, данные варианты осуществления применяют пневмоприводной двигатель для передачи мощности вращения на эндоскопический режущий инструмент типа endocutter с вращательным приводом. Как правило, пневмоприводные двигатели развивают вращательные моменты и скорости вращения в числе оборотов в минуту, которые пропорциональны давлению и объему газа, направляемому в двигатель. В неограничивающих вариантах осуществления, показанных на Фиг.49-56, для передачи вращательного движения от пневмоприводного двигателя к концевому эффектору применен узел шарнирно-поворотного ведущего валика. Однако специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что оригинальные и новаторские аспекты данных вариантов осуществления настоящего изобретения можно также эффективно применять в связи с другими известными концевыми эффекторами с вращательным приводом и другими хирургическими аппаратами, в которых применяется конструкция гибкого ведущего валика для передачи вращательного приводного движения на эндоскопический режущий инструмент типа endocutter. Кроме того, оригинальные и новаторские аспекты данных вариантов осуществления настоящего изобретения можно эффективно применять в связи с конструкциями концевых эффекторов без шарнирного поворота.
На Фиг.49-56 представлен хирургический отрезной и сшивающий скобками аппарат 1500 в соответствии с настоящим изобретением, в котором применяется эндоскопический режущий инструмент 1512 типа endocutter с вращательным приводом. Существует множество разнообразных эндоскопических режущих инструментов 1512 типа endocutter с вращательным приводом и других хирургических аппаратов. Например, одна конструкция подобного вращательно-приводного эндоскопического режущего инструмента типа endocutter описана в заявке на патент США №11/343,447, «Motor Driven Surgical Cutting and Fastening Instrument With Adaptive User Feedback», поданной 31 января 2006 г. изобретателями Шелтоном IV с соавторами (Shelton, IV et al.), соответствующие разделы которой включены в настоящее описание путем отсылки. Другие примеры описаны в заявке на патент США, «Manually Driven Surgical Cutting and Fastening Instrument», поданной 27 июня 2006 г. (KLNG No. 050704/END5779USNP) изобретателями Шелтоном IV с соавторами (Shelton, IV et al.), соответствующие разделы которой включены в настоящее описание путем отсылки.
На Фиг.50 представлен вид с пространственным разделением деталей концевого эффектора 1512 в соответствии с различными неограничивающими вариантами осуществления. Как показано в представленном варианте осуществления, концевой эффектор 1512 может содержать удлиненный желоб 1520, который выполнен в размер для вмещения пневмоприводного инструмента. Пневмоприводной инструмент в различных неограничивающих вариантах осуществления содержит кассету 50 для скобок, в которой установлен с возможностью функционирования «прошивной/отрезной механизм». Данный вариант осуществления содержит узел 1530 клиновидного скользящего блока, на котором находится ножевой участок 1538. Узел 1530 клиновидного скользящего блока установлен на резьбе на винтовой шпиндель 1560. Подшипник 1522, расположенный на дистальном конце 1521 удлиненного желоба 1520, вмещает винтовой шпиндель 1560 и обеспечивает, тем самым, возможность свободного вращения винтового шпинделя 1560 относительно удлиненного желоба 1520. Винтовой шпиндель 1560 может сопрягаться с резьбовым отверстием (не показанным) в узле 1530 клиновидного скользящего блока так, что вращение шпинделя 1560 вынуждает узел 1530 клиновидного скользящего блока перемещаться в дистальном или проксимальном направлении (в зависимости от направления вращения) по удлиненному желобу 1520 между полностью выдвинутым или сработавшим положением, в котором скобки, установленные в кассету, вытолкнуты, и полностью отведенным положением или незадействованным положением. Соответственно, когда винтовой шпиндель 1560 вращается в одном направлении, узел 1530 клиновидного скользящего блока приводится в движение в дистальном направлении через кассету 50 с отрезанием ткани, зажатой в концевом эффекторе 1512, и выталкиванием скобок из кассеты 50 в формообразующий контакт с нижней поверхностью упора 40, которая соединена с возможностью поворота с удлиненным желобом 1520. Скользящий участок 1532 узла 1530 клиновидного скользящего блока может быть выполнен, например, из пластика и может иметь наклонные дистальные поверхности 1534. Когда узел 1530 клиновидного скользящего блока проходит через удлиненный желоб 1520, наклонные передние поверхности 1534 могут выжимать вверх или выталкивать скобки из кассеты 50 для скобок сквозь сжатую ткань к упору 40. Упор 40 загибает скобки и, тем самым, сшивает скобками разрезаемую ткань. Когда узел 1530 клиновидного скользящего блока отводят, ножевой участок 1538 и скользящий участок 1532 могут расцепляться, в результате чего скользящий участок 1532 остается на дистальном конце удлиненного желоба 1520. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что пневмоприводные инструменты можно применять с другими прошивными/отрезными механизмами.
На Фиг.51 и 52 представлена одна конструкция ведущего валика для передачи вращательного движения винтовому шпинделю 1560 от пневмоприводного двигателя в узле 300 рукоятки. Как можно видеть из Фиг.51, в данном варианте осуществления можно применять узел 170 замыкающей трубки, который подробно описан выше. Узел 170 замыкающей трубки помещен с возможностью скольжения на несущем узле 1540, который содержит проксимальный несущий сегмент 1542, в который установлен с возможностью вращения главный вращательный (или проксимальный) ведущий валик 1544, который сообщается с промежуточным (или дистальным) ведущим валиком 1546 через коническую зубчатую передачу 1550, которая содержит шестерни 1552, 1554, 1556. Промежуточный ведущий валик 1546 соединен с ведущей шестерней 1548, которая находится в зацеплении с проксимальной ведущей шестерней 1562 винтового шпинделя 1560. Вертикальная коническая шестерня 1552 установлена с возможностью поворота в отверстии 1543 на дистальном конце проксимального несущего сегмента 1542. Дистальный несущий сегмент 1570 может служить для вмещения в него промежуточного ведущего валика 1546 и ведущих шестерен 1548, 1554. Главный ведущий валик 1544, промежуточный ведущий валик 1546 и узел шарнирного поворота (например, коническую зубчатую передачу 1550) совместно иногда именуются в настоящем описании как «узел главного ведущего валика».
Как можно видеть на Фиг.53 и 54, различные варианты осуществления аппарата 1500 получают энергию от источника пневматической энергии в форме сжатого газа 620. В вариантах осуществления, показанных на данных фиг., источник 620 содержит сменный/перезаряжаемый баллон 622, который установлен в участок 642 ручки корпусного узла 300. Баллон 622 может быть перезаряжаемым. Однако специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что возможно также эффективное применение несменных/перезаряжаемых источников (баллонов) сжатого газа. В других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для подведения сжатого газа из внешнего источника 618 сжатого газа. Например, аппарат 1500 можно было бы подсоединять к больничной магистрали сжатого воздуха (непоказанной) посредством гибкой подводящей линии 617. Смотри Фиг.53A.
Оригинальные и новаторские аспекты сменного/перезаряжаемого баллона 622 более подробно поясняются ниже. Однако с целью объяснения системы привода для обеспечения вращательного движения в концевом эффекторе 1512 показано, что сжатый газ протекает под давлением из баллона 622 или внешнего источника 618 сжатого газа по подводящей линии 650 в обычный регулятор 660 расхода. Регулятор 660 расхода связан с соединительной тягой 662 питания, которая соединена с рычагом 670 включения. Смотри Фиг.53 и 58. В различных вариантах осуществления рычаг 670 включения установлен смежно с элементом контроля перемещения или условно позиционируемым рычагом 310' прошивки, который соединен с возможностью поворота с узлом 300 рукоятки шарнирным 370 пальцем, который продолжается между правым корпусным элементом 320 и левым корпусным элементом 330. Условно позиционируемый рычаг 310' может быть изготовлен из пластика или другого подходящего материала и имеет участок, по существу, U-образный в сечении, для вмещения, как показано, рычага 670 включения. Врач может взять рукой участок 352 ручки корпусного узла 300 так, чтобы три его нижних пальца находились на условно позиционируемом рычаге 310' и его указательный палец находился на рычаге 670 включения. Нажим на рычаг 670 включения внутрь к условно позиционируемому рычагу 310' вынуждает регулятор 660 расхода представлять проход через него для газа под давлением из источника 620 (или 618 на Фиг.53A) в подводящую линию 680 и в направляющий распределитель 1610.
Как можно видеть на Фиг.56, направляющий распределитель 1610 содержит секцию 1620 положения для хода вперед, секцию 1630 останова и секцию 1640 хода назад. Секции 1620, 1630, 1640 распределителя можно вручную переключать кнопками 1612 и 1614, которые выступают через корпус 300 рукоятки. Смотри Фиг.49 и 56. Две подводящих/выпускных линии 1700, 1710 продолжаются от направляющего распределителя 1610 в обычный пневмоприводной двигатель 1730. Следовательно, когда врач переключает направляющий распределитель 1610 в положение для хода вперед, канал 1622 хода вперед пропускает поток сжатого газа из подводящей линии 680 и в подводящую/выпускную линию 1700 и, тем самым, вынуждает пневмоприводной двигатель 1730 приводить ведущий валик 1732 двигателя в первом направлении, что, как более подробно описано ниже, приведет к передаче вращательного движения ведущему валику 1544, который будет приводить в движение узел 1532 клиновидного скользящего блока и ножевой участок 1538 в дистальном направлении через концевой эффектор 1512 в процессе хода прошивки. Газ, выходящий из пневмоприводного двигателя 1730 по подводящей линии 1710, выпускается через выпускное проходное отверстие 1632. Когда распределитель 1610 переключают в положение для хода назад, газ, проходящий по подводящей линии 680, получает возможность протекания по подводящей линии 1710 в пневмоприводной двигатель 1730. Газ, выходящий из пневмоприводного двигателя 1730 по подводящей/выпускной линии 1700, выпускается через выпускное проходное отверстие 1632. Когда распределитель находится в положении останова, подводящая линия 1680 и подводящая/выпускная линия 1710 закрыты и подводящая линия 1700 соединена с выпускным проходным отверстием 1632. Смотри Фиг.56.
Как можно дополнительно видеть на Фиг.56, выводной валик 1732 пневмоприводного двигателя 1730 может нести первую ведущую шестерню 1734, которая находится в зубчатом зацеплении со второй ведущей шестерней 1736, которая установлена на входном валике 1738 планетарной зубчатой передачи 1740. Планетарная зубчатая передача 1740 содержит выводной валик 1742, который соединен с проксимальным концом 1545 ведущего валика 1544 посредством обычного муфтового элемента 1743 сцепления валов для передачи упомянутому ведущему валику вращательного движения. Следовательно, когда распределитель 1610 переключают в положение для хода вперед, выводной валик 1732 пневмоприводного двигателя 1730 придает вращательное движение ведущему валику 1544 через шестерни 1734, 1736 и планетарную зубчатую передачу 1740 и, тем самым, вынуждает узел 1530 клиновидного скользящего блока и ножевой участок 1538 продвинуться через кассету 50 с отрезанием ткани, зажатой в концевом эффекторе 1512, и выталкиванием скобок из кассеты 50 в формообразующий контакт с упором 40. Когда распределитель 1610 переключают в положение для хода назад, выводной валик 1732 пневмоприводного двигателя 1730 придает противоположное вращательное движение ведущему валику 1544 для отведения узла 1530 клиновидного скользящего блока и ножевого участка 1538 в проксимальном направлении обратно через кассету 50.
Варианты осуществления, изображенные на Фиг.49-56, содержат также дополнительные оригинальные и новаторские особенности, которые повышают эксплуатационные качества аппарата и обеспечивают для врача различные формы обратной связи, чтобы врач мог контролировать положение узла 1530 клиновидного скользящего блока и ножевого участка 1538 в кассете 50, по мере того как данный узел продвигается в кассете в дистальном направлении, а также отводится. Как также можно видеть на Фиг.56, на ведущем валике 1544 или на выводном валике 1742 планетарной зубчатой передачи 1740 обеспечена шестерня 1750 обратной связи. Шестерня 1750 обратной связи находится в зубчатом зацеплении с шестерней 1752 положения ножа, которая установлена на резьбовом валике 1754 положения ножа. Валик 1754 положения ножа может быть установлен на соответствующих подшипниковых конструкциях (непоказанных), которые облегчают его свободное вращение. Проксимальный концевой переключатель 1760 относится к проксимальному концу 1756 валика 1754, и дистальный концевой переключатель 1770 относится к дистальному концу 1758 валика 1754. Индикатор 1780 ножа установлен на резьбе на валике 1754 положения ножа с возможностью движения по нему в дистальном и проксимальном направлениях. Когда ведущий валик 1544 вращается в направлении, которое вынуждает узел 1532 клиновидного скользящего блока и ножевой участок 1538 перемещаться в дистальном направлении через кассету 50, индикатор 1780 ножа также перемещается в проксимальном направлении к дистальному концевому переключателю 1770. Дистальный концевой переключатель 1770 ориентирован так, что, когда узел 1530 клиновидного скользящего блока и ножевой участок 1538 находятся в крайнем дистальном положении, индикатор 1789 ножа включает дистальный концевой переключатель 1770. В левом корпусном элементе 330 (или правом корпусном элементе 320, в зависимости от местоположения валика 1754 положения ножа в корпусном узле 300) обеспечено окно, чтобы врач мог наблюдать положение индикатора 1780 ножа для определения положения прошивного/отрезного механизма (узла 1530 клиновидного скользящего блока и ножевого участка 1538) в пределах его прошивного хода, а также чтобы снабдить врача средством для контроля положения узла 1530 клиновидного скользящего блока в процессе отводящего хода.
Кроме того, в различных вариантах осуществления может быть обеспечена дистальная управляющая линия 1772 от подводящей линии 650 к дистальному концевому переключателю 1770. Между дистальным концевым переключателем 1770 и направляющим распределителем 1610 может быть обеспечена линия 1774 дистального концевого переключателя. Следовательно, когда узел 1530 клиновидного скользящего блока и ножевого участка 1538 закончит прошивной ход и индикатор 1780 ножа включит дистальный концевой переключатель 1770, дистальный концевой переключатель 1770 позволяет газу протекать под давлением от подводящей линии 650 в линию 1774 дистального концевого переключателя и в направляющий распределитель 1610, что, в различных вариантах осуществления, вызывает автоматическое переключение направляющего распределителя 1610 в положение для хода назад и, тем самым, вынуждает пневмоприводной двигатель 1730 реверсировать и, в конечном счете, сообщать реверсное вращательное движение ведущему валику 1544. Когда пневмоприводной двигатель 1730 реверсирует ведущий валик 1544, реверсное вращательное движение передается валику 1754 положения ножа для приведения, тем самым, индикатора 1780 положения ножа в обратное движение к проксимальному концевому переключателю 1760. Проксимальная управляющая линия 1662 может продолжаться также между проксимальным концевым переключателем 1660 и подводящей линией 650, чтобы, когда индикатор 1780 положения ножа включает проксимальный концевой переключатель 1660 (и указывает, тем самым, что узел 1530 клиновидного скользящего блока и ножевой участок 1538 переместился в его полностью отведенное положение), проксимальный концевой переключатель 1660 пропустил поток газа в линию 1664 проксимального концевого переключателя и в направляющий распределитель 1610 и, тем самым, вызвал автоматическое переключение направляющего распределителя 1610 в положение для останова.
В различных вариантах осуществления с линией 1774 дистального концевого переключателя (или дистальным концевым переключателем 1770) может сообщаться первый воздушный свисток 1790 или другое подходящее звукогенерирующее устройство, чтобы, когда дистальный концевой переключатель 1770 включается в конце прошивного хода, воздух, проходящий по линии 1774 дистального концевого переключателя, включал первый свисток 1790 для выдачи врачу звукового сигнала, указывающего, что клиновидный скользящий блок/нож достиг конца прошивного хода. Аналогично с проксимальным концевым переключателем 1760 может сообщаться второй воздушный свисток 1792 или другое подходящее звукогенерирующее устройство, чтобы, когда проксимальный концевой переключатель 1760 включается в конце отводящего хода, воздух, проходящий по линии 1764 проксимального концевого переключателя, включал второй свисток 1792 для выдачи врачу другого звукового сигнала, указывающего, что клиновидный скользящий блок/нож достиг конца отводящего хода. В других вариантах осуществления, например, с дистальным и проксимальным концевыми переключателями 1770, 1760 могут быть связаны светоизлучающие диоды или другие сигнальные устройства с питанием от аккумуляторов, чтобы выдавать пользователю другое показание, когда клиновидный скользящий блок/нож достиг конца прошивного хода и/или отводящего хода. В альтернативных вариантах осуществления свистки 1790, 1792 можно заменять датчиками давления или манометрами для указания, когда устройство достигло конца прошивного хода и/или отводящего хода.
В различных вариантах осуществления, изображенных на Фиг.49-56, пневмоприводной двигатель установлен в узел 300 рукоятки. В вариантах осуществления, изображенных на Фиг.52A и 52B, пневмоприводной двигатель 1730' расположен в дистальной несущей секции 110. Ведущий валик 1546' двигателя содержит насаженную на него ведущую шестерню 1548', которая находится в зубчатом зацеплении с проксимальной ведущей шестерней 1562 винтового шпинделя 1560. На Фиг.52A изображен подобный дистально установленный пневмоприводной двигатель в связи с шарнирно-поворотным сочленением 104, которое описано выше. Вариант осуществления, изображенный на Фиг.52B, использует пневмоприводной узел шарнирно-поворотного сочленения 2002, который описан выше. Подобные конструкции дистально установленных пневмоприводных двигателей можно также применять в связи с хирургическими аппаратами, в которых используют другие конструкции шарнирно-поворотных сочленений, или использовать в связи с аппаратами, в которых концевой эффектор не имеет шарнирного поворота относительно узла рукоятки или участка узла удлиненного стержня, к которому он прикреплен. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что подобные конструкции дистально установленных пневмоприводных двигателей сводят к минимуму потери мощности, которые могли бы иметь место в удлиненных конструкциях ведущих валиков для вариантов осуществления, в которых двигатель установлен в узле рукоятки, и прошивное и отводящее движения должны передаваться через шарнирно-поворотное сочленение в концевой эффектор. Варианты осуществления, например, изображенные на Фиг.52A и 52B, нуждаются в проведении только двух линий 1710 и 1760 через шарнирно-поворотное сочленение для питания электродвигателя 1730'. Линии 1710 и 1760 могут содержать гибкие трубопроводы или что-то подобное и менее склонны налагать ограничения на шарнирно-поворотные сочленения в сравнении с другими конструкциями, которые нуждаются в прохождении через сочленение, по меньшей мере, одного элемента привода.
Кроме того, различные варианты осуществления настоящего изобретения могут быть конструктивно выполнены с возможностью обеспечения пользователя обратной связью в тактильной форме по относительному положению прошивных/отрезных компонентов аппарата. В некоторых вариантах осуществления этого добиваются связыванием элемента контроля перемещения или условно позиционируемого рычага 310' c движениями выдвижения и отведения, сообщаемыми ведущему валику или прошивному/отрезному механизму устройства. В частности, и как показано на Фиг.53-55, данный вариант осуществления может содержать узел 1800 рычажной передачи обратной связи, который, в различных неограничивающих вариантах осуществления, может содержать резьбовой валик 1801 ручной обратной связи, который соединен на резьбе с элементом-гайкой 334, которая установлена с возможностью поворота на участке 332 верхней крепежной пластины условно позиционируемого рычага 310'. Дистальный конец валика 1801 ручной обратной связи содержит участок 1802 универсального шарнира, который служит опорой для шестерни 1804 ручной обратной связи, которая находится в зубчатом зацеплении с шестерней 1752 положения ножа. Когда направляющий распределитель 1610 находится в положении для хода вперед, пневмоприводной двигатель 1730 приводит ведущий валик 1544 в движение так, что прошивной/отрезной механизм в форме клиновидного скользящего блока 1530 и ножевого участка 1538 приводятся в движение в дистальном направлении через кассету (прошивной ход). Шестерня 1750 обратной связи приводит в движение шестерню 1752 положения ножа, которая, в свою очередь, приводит в движение шестерню 1804 ручной обратной связи. Тогда шестерня 1804 ручной обратной связи вращает валик ручной обратной связи, который благодаря его резьбовому зацеплению с гайкой 334 подтягивает условно позиционируемый рычаг 310' к участку 342 ручки узла 300 рукоятки и, тем самым, обеспечивает для врача «тактильную» индикацию продвижения вперед клиновидного скользящего блока 1530 и ножевого участка 1538. Специалистам со средним уровнем компетентности в данной области техники должно быть понятно, что, если врач сделает попытку повернуть условно позиционируемый рычаг 310' к участку 342 ручки узла 300 рукоятки, то валик 1801 ручной обратной связи и гайка 334 воспрепятствуют любому его перемещению. Однако условно позиционируемый рычаг 310' будет автоматически поворачиваться в связи с продвижением и отведением клиновидного скользящего блока 1530 и ножевого участка 1538. Подобная конструкция обеспечивает врача автоматическим тактильным показанием продвижения вперед и отведения клиновидного скользящего блока 1530 и ножевого участка 1538 (прошивного/отрезного механизма) просто при захвате условно позиционируемого рычага 310' во время хирургической операции. Следовательно, врач не должен за чем-нибудь следить для получения такой обратной связи. Данная конструкция дает в одну руку врача невизуальную обратную связь с продвижением прошивного/отрезного механизма между незадействованным положением и сработавшим положением, а также когда прошивной/отрезной механизм двигают обратно из сработавшего положения в незадействованное положение.
Различные варианты осуществления можно дополнительно снабдить другой конструкцией тактильной обратной связи, обозначенной, в общем, позицией 333. Например, как можно видеть на Фиг.53-56, участок 332 верхней крепежной пластины условно позиционируемого рычага 310' можно снабдить рядом вырезов 335, зубцов, канавок и т.п., которые предназначены для сопряжения с пружинным рычагом 337, установленным в узле 300 рукоятки, когда условно позиционируемый рычаг 310' поворачивается на пальце 370 во время прошивного и отводящего ходов. Когда участок 332 верхней крепежной пластины поворачивается с условно позиционируемым рычагом 310', конец пружинного рычага 337 опускается в каждый последовательный вырез 335 и служит для передачи (последовательно) усилия на участок 332 верхней крепежной пластины, которое может ощущаться врачом при захвате условно позиционируемого рычага 310'. Следовательно, по мере того как условно позиционируемый рычаг 310' будет продвигаться вперед, для врача будет обеспечена последовательность дополнительных движений тактильной обратной связи, соответствующих перемещению прошивного/отрезного механизма, для подтверждения, что условно позиционируемый рычаг 310' (и, в конечном счете, прошивной/отрезной механизм) либо выдвигается в ходе прошивки, либо отводится в ходе отведения, смотря по обстоятельствам. Кроме того, когда конец пружинного плеча 337 опускается в каждый последовательный вырез, он может издавать слышимый звук, щелчок и т.п. с предоставлением врачу звуковой обратной связи по перемещению прошивного/отрезного механизма в ходе прошивки и в ходе отведения. Таким образом, данный вариант осуществления обеспечивает последовательность (из, по меньшей мере, двух) слышимых звуков, которые связаны с перемещением прошивного/отрезного механизма между незадействованным и сработавшим положениями.
Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что аппарат 1500 означает серьезное усовершенствование по сравнению с известными конструкциями пневмоприводных эндоскопических режущих инструментов типа endocutter. Например, различные варианты осуществления обеспечивают для врача средство контроля положения прошивного/отрезного механизма (клиновидного скользящего блока/ножа), по мере того как данный механизм приводится в движение на протяжении его прошивного хода. В некоторых вариантах осуществления, когда клиновидный скользящий блок/нож достигает конца своего прошивного хода, он автоматически отводится. После вывода в полностью отведенное положение распределитель может автоматически переключаться в положение для останова и, тем самым, прекращать подачу воздуха из источника 618 или 620 в пневмоприводной двигатель 1730. Однако, если в процессе приведения в действие врач пожелает остановить продвижение клиновидного скользящего блока/ножа в дистальном направлении в кассете, врач может просто вручную переключить распределитель 1610 в положение для хода назад и продолжать задействовать рычаг включения 670 для подачи сжатого газа в пневмоприводной двигатель 1730, пока клиновидный скользящий блок/нож не переместится в заданное отведенное положение. Кроме того, оригинальный и новаторский, условно позиционируемый рычаг 310' обеспечивает для врача ручную или тактильную обратную связь, которую врач может ощущать во время захвата условно позиционируемого рычага 310'. Кроме того, врача можно обеспечить слышимым звуковым сигналом, когда клиновидный скользящий блок/нож достиг конца прошивного хода и/или полностью отведен.
Специалисту в данной области техники должно быть также очевидно, что оригинальные и новаторские преимущества, предоставляемые устройством контроля перемещения, можно получить также при применении элементов 500, 800 привода или мембранной коробки 900, при таком соединении каждого из данных элементов привода с участком 332 верхней крепежной пластины или другим участком условно позиционируемого рычага 310' посредством гибкого троса (непоказанного) механизма тянуще-толкающего типа или жестким элементом (для вариантов осуществления без шарнирного поворота), что продвижение вперед или отведение данных элементов привода прямо или косвенно связано с условно позиционируемым рычагом 310'. Данную оригинальную и новаторскую конструкцию можно также применять с вариантом осуществления, представленным на фигурах 70-83 и описанным ниже.
Как указано выше, узел 1800 рычажной передачи обратной связи не только автоматически перемещает условно позиционируемый рычаг 310' со скоростью, которая соответствует скорости перемещения прошивного/отрезного механизма для снабжения врача средством контроля продвижения прошивного/отрезного механизма, но в узле 1800 рычажной передачи обратной связи можно применить резьбы или другое средство, которое эффективно предотвращало бы или сильно ограничивало возможность врача вручную поворачивать условно позиционируемый рычаг 310'. В данных неограничивающих вариантах осуществления условно позиционируемый рычаг 310' перемещается, только если его двигает узел 1800 рычажной передачи обратной связи. В других вариантах осуществления ручное перемещение условно позиционируемого рычага 310' может блокироваться двигателем (непоказанным) или другим газовым цилиндром (непоказанным), выполненным с возможностью блокирования любого поворотного перемещения условно позиционируемого рычага 310' при приведении в действие. Например, подача усилия на рычаг 670 включения включает выпуск газа, но, пока прошивной/отрезной механизм не начал перемещаться, условно позиционируемый рычаг 310', по существу, не получит возможности перемещаться, и, если прошивной/отрезной механизм прекращает перемещаться, то также прекращается движение условно позиционируемого рычага 310'.
Однако в других различных вариантах осуществления узел 1800 рычажной передачи обратной связи можно конструктивно выполнять с возможностью поддержки врачом элемента привода в форме пневмоприводного двигателя 1740 в ходе прошивки, чтобы наращивать его усилие или замедлять выдвижение прошивного/отрезного механизма, если это необходимо врачу. В данных вариантах осуществления, например, валик 1801 обратной связи можно сформировать с резьбой трапецеидального типа или другой резьбовой конструкцией или конфигурацией, которая фактически позволила бы врачу прилагать давление к условно позиционируемому рычагу 310' и, тем самым, сообщать вращательное усилие валику 1801 благодаря его зацеплению с гайкой 334. При сообщении вращательного движения валику 1801 врач прилагает также вращательное усилие к шестерне 1804, которая находится в зубчатом зацеплении с шестерней 1750, которая смонтирована на ведущем валике 1544. Следовательно, если прошивной/отрезной механизм сталкивается с сопротивлением, то врач может подать механически развиваемую мощность на ведущий валик 1544 путем нажима на условно позиционируемый рычаг 310'. Если врач желает замедлить или затормозить перемещение прошивного/отрезного механизма, то врач может приложить усилие к условно позиционируемому рычагу 310', который, в свою очередь, будет оказывать сопротивление/замедлять вращение валика 1801 и шестерни 1804 и, в конечном счете, вращение ведущего валика 1544.
Вышеописанные различные варианты осуществления пояснялись в связи с использованием сменного баллона 622 для подведения газа под давлением, чтобы приводить устройство в действие. В различных вариантах осуществления сменный баллон 622 может быть сначала заполнен газом под давлением и не подлежать перезарядке. Например, баллон 622 может быть выполнен в виде обычного одноразового баллона, наполненного диоксидом углерода. После того как баллон выработается, пользователь снимает его с узла рукоятки и заменяет его свежим заполненным баллоном. Газами других типов, которые можно применять, являются, например, сжатый воздух, диоксид углерода (CO2), азот, кислород, аргон, гелий, гидрид натрия, пропан, изобутан, бутан, хлорфторуглероды, диметиловый эфир, метилэтиловый эфир, оксиды азота, гидрофторалканы (HFA), либо, например, HFA 134a (1,1,1,2,-тетрафторэтан), либо HFA 227 (1,1,1,2,3,3,3-гептафторпропан). Данная конструкция обеспечивает огромное улучшение по сравнению с известными конструкциями пневмоприводного хирургического аппарата. Однако количество раз возможного использования аппарата зависит от объема газа, который можно хранить в таких баллонах, и потребности эффективного обеспечения стерильности устройства.
В других вариантах осуществления настоящего изобретения применяется баллон 622, который хранит газ в жидкой фазе под давлением в баллоне, и затем жидкость превращается в газообразную фазу, когда оказывается под сниженным давлением после включения устройства. Примеры подобных жидкостей, которые могут применяться в данных вариантах осуществления включают в себя оксиды азота, диметилэтиловый эфир, метилэтиловый эфир, гидрид натрия, пропан, изобутан, бутан, гидрофторалканы (HFA), либо, например, HFA 134a (1,1,1,2,-тетрафторэтан), либо HFA 227 (1,1,1,2,3,3,3-гептафторпропан) и диоксид углерода (CO2) под высокими давлениями.
На Фиг.57 представлен один неограничивающий пример баллона 622, который содержит один из жидких материалов 624, упомянутых выше. Баллон 622 может быть изготовлен из стали, алюминия или другого материала, который совместим с жидкостью/парами, хранящимися в данном баллоне, и способен выдерживать развиваемые в нем внутренние давления. При применении хирургических аппаратов таких типов, которые описаны в настоящей заявке, врач часто поворачивает узел рукоятки 300 во множество различных положений, включая перевернутое верхом вниз для получения заданного положения концевого эффектора 12. Поэтому в данных вариантах осуществления, для предотвращения нежелательного вытекания жидкости из баллона 622 в систему управления во время подобного манипулирования, в баллоне 622 предусмотрена мембрана 626. Мембрана 626 может быть изготовлена из материала, который предотвращает прохождение сквозь нее жидкого материала, но допускает прохождение сквозь мембрану 626 пара, образующегося из жидкости. Следовательно, врач может свободно манипулировать узлом 300 рукоятки без риска прохождения жидкого материала 624 в направляющий распределитель 1610 и/или пневмоприводной двигатель 1730. Хотя баллон 622 изображен в виде одной цельной конструкции, баллон 622 может быть изготовлен из, по меньшей мере, двух деталей для облегчения помещения в него жидкого материала 624 и мембраны 626. Для создания уплотнений, непроницаемых для текучей среды, между различными участками баллона в данном варианте осуществления можно применить соответствующий(ие) уплотнительный(ые) элемент(ы). Кроме того, для наполнения баллона 622 можно обеспечить наливное отверстие (непоказанное).
В варианте осуществления, показанном на Фиг.57, когда врач переключает направляющий распределитель 1610 в положение для хода вперед и включает регулятор 660 расхода, давление в баллоне 622 снижается. Такое снижение давления вызывает начало испарения жидкого материала 624, и пар 628 проходит сквозь мембрану 626 и служит для питания энергией разнообразных вышеописанных систем управления. Таким образом, при снижении давления в баллоне 622 жидкий материал 624 начинает испаряться, и пар 628 под давлением служит для питания устройства энергией.
В других вариантах осуществления возможно применение жидких материалов, которые требуется сжигать для превращения жидкого материала в газообразную фазу. Примерами подобных жидких материалов являются пропан, бутан и другие нефтяные продукты. Для поджига жидкого материала можно применить обычный кнопочный воспламенитель или другую систему зажигания. В подобных системах другие компоненты устройства следовало бы изготавливать из таких материалов и таким образом, чтобы безопасно отводить любые тепло/дымовые газы, образующиеся при этом. В еще одних вариантах осуществления возможно применение материалов с легким переходом из одной фазы в другую, которые предназначены, в частности, для превращения из твердой фазы в текучую фазу, твердой фазы в газовую фазу или из текучей фазы в газовую фазу при низком давлении и температуре, при подведении тепла. Примерами подобных материалов являются парафин и многочисленные смеси гидридов натрия. Данные материалы с легким переходом из одной фазы в другую могут сильно изменяться в объеме при подведении тепла в систему. Подобные устройства будут использовать средство, например, горелку для подведения требуемого тепла в материал. И вновь компоненты данного устройства, которые могут подвергаться воздействию упомянутого тепла, следовало бы проектировать и изготавливать из материалов, предназначенных для безопасного отведения тепла и защиты врача во время применения.
Вариант осуществления, показанный на Фиг.57, допускает применение с множеством вышеописанных баллонов различных типов и обеспечивает разнообразные преимущества над другими вариантами осуществления, в которых баллон постоянно установлен в узле 300 рукоятки. В частности, и, как показано на Фиг.57, баллон 622 может быть установлен в полости 671, сформированной в участке 342 ручки узла 300 рукоятки. Для обеспечения доступа в полость 671 участок 342 ручки может быть изготовлен из двух легкоразъемных деталей или снабжен съемной крышкой (непоказанной), которая защелкивается или иначе - съемно крепится к данному участку ручки. В различных вариантах осуществления выпускной конец 630 баллона 622 ввинчивается в резьбовое проходное отверстие 634 в блоке 632 распределения. Резьбовое проходное отверстие 634 сообщается с подводящим каналом 636, который открывается и закрывается игольчатым клапаном 638. В частности, в различных вариантах осуществления игольчатый клапан 638 ввинчивается в блок 632 распределения так, чтобы подводящий канал 636 можно было открывать и закрывать поворотом игольчатого клапана 638. Однако возможно применение других клапана или конструкций регулирования расхода.
Для обеспечения для врача показаний давления в баллоне во время применения можно оборудовать датчик 640 давления с пневмогидравлическим сообщением с подводящим каналом 636. В участке 342 ручки можно обеспечить окно 642 датчика, чтобы пользователь мог наблюдать датчик 640 во время применения. Смотри Фиг.49.
Как можно видеть на Фиг.57 и 58, баллон 622 может быть установлен в съемном участке 342 ручки, который съемно закреплен к основному соединительному участку 344, который выступает вниз из основного участка 340 рукоятки. Съемный участок 342 ручки может зацепляться с основным соединительным участком 344 посредством любой подходящей конструкции. Например, в соответствии с различными вариантами осуществления сцепление съемного участка 342 ручки с основным соединительным участком 344 можно выполнить показанной конструкцией с прямолинейным скользящим сдвигом. Как показано, например, на фиг.57-59 и 61, отцепляемый участок 342 ручки дополнительно содержит первую и вторую верхние направляющие 367 скольжения и первую и вторую нижние направляющие 368 скольжения. Как также можно видеть на данных фигурах, первая верхняя направляющая 367 скольжения образует уклон 369. Верхние направляющие 367 скольжения выполнены с возможностью вмещения в соответствующие области 384, образованные в основном участке 340 рукоятки панелями 380 и 382.
Хирургический аппарат может дополнительно содержать блокировочную систему 1900. Блокировочная система 1900, показанная более подробно, например, на фигурах 59 и 64-69, конструктивно выполнена и расположена с возможностью блокировки соединения основного соединительного участка 344 к съемному участку 342 ручки после заданного числа отсоединений съемного участка 342 ручки от основного соединительного участка 344. Заданное число может быть любым числом раз. Подобная конструкция может быть особенно полезна для того, чтобы обеспечить эффективное содержание устройства в стерильности путем ограничения числа раз возможного применения устройства. Например, в соответствии с различными вариантами осуществления блокировочная система 1900 может блокировать соединение основного соединительного участка 344 со съемным участком 342 ручки после того, как съемный участок 342 ручки отсоединяли от основного соединительного участка 344 два раза. Хотя блокировочная система 1900 показана находящейся, большей частью, внутри основного корпусного участка 340, следует понимать, что согласно другим вариантам осуществления блокировочная система 1900 может находиться, большей частью, внутри съемного участка 342 ручки.
Как показано на Фиг.59, блокировочная система 1900 содержит счетчик 1902 и блокирующий узел 1904, соединенный со счетчиком 1902. Счетчик 1902 конструктивно выполнен и расположен с возможностью движения вперед, когда съемный участок 342 ручки отсоединяют от основного соединительного участка 344 узла 300 рукоятки. Как можно видеть на Фиг.59, счетчик 1902 соединен с осью 1906, которая установлена в выступе 1908, соединенном с правым корпусным элементом 320. Счетчик 1902 содержит шаговое колесо 1910, соединенное с осью 1906, и поджимной элемент 1912, соединенный с шаговым колесом 1910. Поджимной элемент может содержать 1912, например, торсионную пружину, выполненную с возможностью поджима шагового колеса 1910 в направлении против часовой стрелки. Смотри Фиг.59.
Шаговое колесо 1910 образует выступы 1914, 1914', 1914”, которые взаимодействуют с блокирующим узлом 1904 для ограничения движения вперед шагового колеса 1910. Один из выступов 1914” конструктивно выполнен и расположен с возможностью взаимодействия с блокирующим узлом 1904 для блокирования соединения съемного участка 342 ручки с основным соединительным элементом 344 после того, как участок 342 ручки отсоединяли от основного соединительного участка 344 заданное число раз. Хотя шаговое колесо 1910 показано с образованными на нем выступами 1914, 1914', 19141”, следует понимать, что согласно другим вариантам осуществления на шаговом колесе 1910 могут быть образованы впадины, которые взаимодействуют с блокирующим узлом 1904 для ограничения движения вперед шагового колеса 1910, и одна из впадин может взаимодействовать с блокирующим узлом 1904 для блокирования соединения съемного участка 342 ручки с основным соединительным элементом 344 после того, как участок 342 ручки отсоединяли от основного соединительного участка 344 заданное число раз.
Ось 1906 конструктивно выполнена и расположена с возможностью допуска сброса шагового колеса 1910 в предыдущее положение. Например, ось 1906 может образовывать отверстие 1916 шестиугольной формы, и шестигранный инструмент можно вставлять через отверстие 1918 в левом корпусном элементе 330 (показанном на Фиг.60) и в отверстие 1916 шестиугольной формы и затем поворачивать по часовой стрелке для сброса шагового колеса 1910 в предыдущее положение.
Как показано на Фиг.59, блокирующий узел 1904 содержит блокирующий элемент 1920, направляющую 1922 блокирующего элемента, пропускной элемент 1924 и поджимной элемент 1926. Пропускной элемент 1924 находится в контакте с блокирующим элементом 1920, соединен с возможностью поворота с направляющей 1922 блокирующего элемента и взаимодействует с выступами 1914, 1914', 1914” для ограничения движения вперед шагового колеса 1910. Поджимной элемент 1926 соединен с пропускным элементом 1924. Поджимной элемент 1926 может содержать, например, торсионную пружину, выполненную с возможностью поджима пропускного элемента 1924 в направлении по часовой стрелке. Работа блокировочной системы 1900 более подробно описана ниже со ссылками на Фиг.64-69.
Как показано, например, на Фиг.59-63, узел 300 рукоятки дополнительно содержит систему 1930 разъединения, конструктивно выполненную и расположенную с возможностью инициирования отцепления съемного сегмента 342 ручки от основного соединительного участка 344. Система 1930 разъединения находится внутри основного соединительного участка 344 и содержит деблокирующую кнопку 1932 и первый и второй разъединительные элементы 1934, соединенные или выполненные одним целым с деблокирующей кнопкой 1932. Каждый из первого и второго разъединительных элементов 1934 образует деблокирующую наклонную поверхность 1936. Система 1930 разъединения дополнительно содержит первый и второй разъединительные пальцы 1938 в контакте с соответствующими деблокирующими наклонными поверхностями 1936, первую и вторую фиксирующие пружины 1940 в контакте с первым и вторым разъединительными пальцами 1938' и первую и вторую выталкивающие пружины 1942 в контакте с первой и второй нижними направляющими 368 скольжения. Смотри Фиг.62. Как можно видеть на Фиг.59, свободные концы 1941 пружин 1940 продолжаются через соответствующее отверстие 321 в правом корпусном элементе 320 и соответствующее отверстие 331 в левом корпусном элементе 330 в соответствующие отверстия 372 в верхних направляющих 367 скольжения для фиксации съемного участка 342 ручки в основном соединительном участке 344.
Для инициирования отцепления съемного участка 342 ручки от соединительного участка 344 ручки деблокирующую кнопку 1932 сдвигают и, тем самым, вынуждают первый и второй разъединительные элементы 1934 и соответствующие деблокирующие наклонные поверхности 1936 также сдвигаться вперед. По мере того как деблокирующие наклонные поверхности 1936 сдвигаются вперед, деблокирующие наклонные поверхности 1936 вынуждают первый и второй разъединительные пальцы 1938 изменять положение. Изменение соответствующих положений первого и второго разъединительных пальцев 1938 вынуждает первую и вторую фиксирующие пружины 1940 перемещаться вверх из отверстий 372 в верхних направляющих 367 скольжения на достаточное расстояние, чтобы первая и вторая верхние направляющие 367 скольжения выдвинулись из зацепления с ними. Когда съемный участок 342 ручки перемещается от основного соединительного участка 344 ручки, каждая из первой и второй выталкивающих пружин 1942 высвобождает накопленную энергию и, тем самым, воздействует усилием соответственно на каждую из первой и второй нижней направляющих 368 скольжения. Оказываемое усилие помогает отцеплению съемного участка 342 ручки от основного соединительного участка 344 ручки. Следует понимать, что в соответствии с другими вариантами осуществления система 1930 разъединения может содержать другие компоненты и/или конфигурации, подходящие для инициирования отсоединения съемного участка 342 ручки от основного соединительного участка 344 ручки.
Как показано на Фиг.57 и 58, дистальный конец 637 подводящего канала 636 имеет точку 639, сформированную на нем для придания дистальному концу 637 способности протыкать насквозь стерильную уплотнительную мембрану 646, установленную внутри закрытой распределительной камеры 644, обеспеченной в основной соединительной секции 344. В частности, дистальный конец 637 подводящего канала 636 вставляют через проходное отверстие 645 в распределительную камеру 644. Стерильную мембрану 646 можно выполнять из любого подходящего, допускающего прокалывание материала, который допускает стерилизацию и может обеспечивать уплотнение, по существу, непроницаемое для текучей среды или воздуха, с дистальным концом 637 подводящего канала 636 при его вставке сквозь мембрану и при этом сохранять стерильность области внутри распределительной камеры 644, когда конец 637 подводящего канала 636 извлекают из мембраны.
Как можно видеть также на Фиг.57 и 58, подводящая линия 650 имеет пневмогидравлическое соединение с распределительной камерой 644, так что сжатый газ, поступающий в распределительную камеру 644 из подводящей линии 636, протекает в подводящую линию 650. На Фиг.57 показан съемный участок 342 ручки перед присоединением к основному соединительному участку 344. На Фиг.58 показан съемный участок 342 ручки, присоединенный к основному соединительному участку 344. Как можно видеть на Фиг.58, дистальный конец 637 подводящего канала 636 проткнул насквозь стерильную мембрану 646. Для облегчения вставки дистального конца 637 подводящего канала 636 сквозь стерильную мембрану между стенкой съемного участка 342 ручки и блоком 632 распределения обеспечена пружина 649 сжатия. Данная конструкция обеспечивает некоторый «свободный сдвиг» для блока 632 распределения, когда дистальный конец 637 подводящего канала 636 вставляют сквозь мембрану 646.
На Фиг.64-69 показаны относительные положения компонентов блокировочной системы 1900 в разные моменты в процессе соединения/разъединения. На Фиг.64 показаны относительные положения перед первым полным сцеплением участка 342 ручки с основным соединительным участком 344. Пропускной элемент 1924 находится в контакте с выступом 1914 и, тем самым, препятствует движению шагового колеса 1910 вперед.
Участок 342 ручки крепят к соединительному участку 344 продвижением направляющих 637 скольжения в соответствующие каналы 384. Блокирующий элемент 1920 выступает в один из каналов 384 через отверстие 381 в панели 380. Смотри Фиг.59. Когда первая и вторая верхняя направляющие 367 скольжения продвигаются, наклонная поверхность 369 на одной из первой и второй верхних направляющих 367 скольжения контактирует с блокирующим элементом 1920 и вынуждает его перемещаться вверх к шаговому колесу 1910. Когда блокирующий элемент 1920 двигается к шаговому колесу 1910, блокирующий элемент 1920 вынуждает пропускной элемент 1924 отодвинуться от шагового колеса 1910. Смотри Фиг.65. По мере того как первая верхняя направляющая 367 скольжения и наклонная поверхность 369 продолжают двигаться вперед, блокирующий элемент 1920 продолжает двигаться к шаговому колесу 1910. После того как участок 352 ручки полностью сцепится с основным участком 351, блокирующий элемент 1920 находится в контакте с выступом 1914, который сначала находился в контакте с пропускным элементом 1924 и, тем самым, препятствует движению вперед шагового колеса 1910, как показано на Фиг.66.
После того как инициируется отцепление участка 342 ручки от основного соединительного участка 344, первая и вторая верхние направляющие 367 скольжения двигаются в противоположном направлении, наклонная поверхность 369, образованная первой верхней направляющей 367 скольжения, позволяет блокирующему элементу 1920 отодвигаться от шагового колеса 1910. Когда блокирующий элемент 1920 отодвигается от шагового колеса 1910, блокирующий элемент 1920 позволяет пропускному элементу 1924 двигаться к шаговому колесу 1910 и мимо выступа 1914, как показано на Фиг.67. Когда участок 342 ручки отсоединяется от основного соединительного элемента 344, блокирующий элемент 1920 отодвигается достаточно далеко от шагового колеса 1910 до потери контакта с выступом 1914 и позволяет шаговому колесу 1910 поворачиваться, пока второй выступ 1914' не приходит в контакт с пропускным элементом 1924, как показано на Фиг.68.
В этот момент счетчик 1902 продвинут на одно положение, и участок 342 ручки можно повторно соединить с основным соединительным участком 344. Цикл соединения/разъединения можно повторить. На Фиг.68 показан второй процесс соединения. Когда участок 342 ручки полностью сцеплен с основным соединительным участком 344, блокирующий элемент 1920 находится в контакте с выступом 1914” и, тем самым, препятствует движению вперед шагового колеса 1910, как показано на Фиг.69. В конце второго цикла, когда участок 342 ручки разъединен с основным соединительным участком 344, пропускной элемент 1926 находится в контакте с третьим выступом 1914”, как показано на Фиг.69. Третий выступ 1914” конструктивно выполнен и расположен с возможностью блокирования отодвигания пропускного элемента 1926 от шагового колеса 1910 блокирующим элементом 1920 и, тем самым, блокирования повторного соединения основного соединительного участка 344 с участком 342 ручки (или его соединения со сменной секцией ручки). Поэтому в соответствии с данными вариантами осуществления хирургический аппарат фактически является аппаратом двухразового использования. Однако специалисту в данной области техники должно быть очевидно, что число использований можно увеличить, если на шаговом колесе 1910 образовать дополнительные выступы или впадины.
На Фиг.70-83 представлено другое оригинальное и новаторское пневмоприводное хирургическое отрезное и фиксирующее устройство 3010 в соответствии с настоящим изобретением, которое снабжает врача возможностью контролировать продвижение при прошивном ходе, а также обеспечивает возможность ручного отведения прошивных/отрезных компонентов данного устройства. Данный вариант осуществления можно применять в связи с вышеописанным концевым эффектором 12 или с другими конструкциями концевых эффекторов.
Удлиненный несущий узел 3102 в данном варианте осуществления может содержать проксимальный несущий сегмент 3104, который соединен с дистальным несущим сегментом 3106. В альтернативных вариантах осуществления удлиненный несущий узел 3102 может содержать единственный компонент. Удлиненный несущий узел 3102 является, по существу, полым и неподвижно соединенным с корпусным узлом 300. Как можно видеть на Фиг.79 и 80, проксимальный конец 3105 проксимального несущего сегмента может быть соединен с корпусным узлом правым крепежным шпеньком 3110, выступающим из правого корпусного элемента 320, и левым крепежным шпеньком 3112, выступающим из левого корпусного элемента 330. Дистальный конец удлиненного несущего элемента 3102 может быть соединен с удлиненным желобом 20 вышеописанным образом.
Кроме того, в данном варианте осуществления удлиненная замыкающая трубка 3190 продолжается из узла 300 рукоятки к концевому эффектору 12. Дистальный конец 3192 замыкающей трубки 3190 содержит подковообразный вырез 3194 и служит для взаимодействия с размыкающей/смыкающей лапкой 46 на упоре 40 описанным выше образом, когда замыкающая трубка 3190 перемещается аксиально на несущем сегменте 3102. Смотри Фиг.70.
Как можно видеть на Фиг.71, узел 3400 возвратно-поступательной муфты, который соединен с замыкающим рычагом 302 узлом 430 рычажной передачи, установлен внутри основного корпусного участка 340. Узел 3400 возвратно-поступательной муфты может быть также изготовлен из двух деталей 3402, 3404, которые отформованы или иначе - изготовлены из полимера или другого подходящего материала и предназначены для состыковки. Детали 3402, 3404 могут удерживаться совместно защелкивающими элементами, и/или клеем, и/или болтами, винтами, зажимами и т.п. Правый участок 3402 узла 3400 возвратно-поступательной муфты содержит правый удерживающий фланцевый сегмент 3405, который выполнен с возможностью взаимодействия с левым удерживающим фланцевым сегментом (непоказанным) на левом участке 3404 узла 3400 возвратно-поступательной муфты для формирования удерживающего фланцевого узла, который может продолжаться в удерживающую канавку (непоказанную) в проксимальном конце 3196 удлиненной замыкающей трубки 3190 вышеописанным образом. Проксимальный конец 3104 удлиненного несущего элемента 3102 продолжается в отверстие 3403, сформированное в дистальном конце узла 3400 возвратно-поступательной муфты, и неподвижно соединен с правым корпусным элементом 320 правым удерживающим шпеньком 3110, который продолжается через отверстие 3406, и левым удерживающим шпеньком 3112, который продолжается через 3408 в правом участке 3402 и левом участке 3404 соответственно. Кроме того, узел 3400 возвратно-поступательной муфты снабжен продолжающимися вбок направляющими ребрами 3410, 3411. Ребро 3410 выполнено с возможностью вмещения с возможностью скольжения в соответствующую направляющую ребра в правом корпусном элементе 320, и ребро 3411 выполнено с возможностью вмещения с возможностью скольжения в соответствующую направляющую ребра в левом корпусном элементе 330. Следовательно, узел 3400 возвратно-поступательной муфты и замыкающая трубка 3190 могут аксиально перемещаться относительно несущего узла 3102, который соединен с узлом 300 рукоятки.
Аксиальное перемещение узла 3400 возвратно-поступательной муфты и удлиненной замыкающей трубки 3190 в дистальном направлении (по стрелке «C») создается перемещением замыкающего рычага 302 к участку 342 ручки узла 300 рукоятки, и аксиальное перемещение узла 3400 возвратно-поступательной муфты в проксимальном направлении (по стрелке «D») создается перемещением замыкающего рычага 302 от участка 342 ручки. В различных вариантах осуществления узел 3400 возвратно-поступательной муфты снабжен соединительной лапкой 3412, которая облегчает прикрепление к ней узла 3430 замыкающей рычажной передачи. Смотри Фиг.71 и 72. Узел 3430 замыкающей рычажной передачи содержит вильчатый участок 3432, который шарнирно, с возможностью поворота, присоединен к соединительной лапке 3412 штифтом 3414. Узел 3430 замыкающей рычажной передачи дополнительно содержит замыкающее плечо 3434, которое шарнирно, с возможностью поворота, присоединено к узлу 304 вилки, сформированному на замыкающем рычаге 302, замыкающим штифтом 436, как показано на Фиг.71. Замыкающий рычаг 302 установлен с возможностью поворота в узле 300 рукоятки на шарнирном пальце 306, который продолжается между правым корпусным элементом 320 и левым корпусным элементом 330.
Когда врачу требуется сомкнуть упор 40 и зажать ткань в концевом эффекторе 12, врач притягивает замыкающий рычаг 302 к участку 342 ручки. Когда врач подтягивает замыкающий рычаг 302 к участку 342 ручки, узел 3430 замыкающей рычажной передачи перемещает узел 3400 возвратно-поступательной муфты в дистальном направлении «C», пока узел 3430 замыкающей рычажной передачи не переместится в положение фиксации, показанное на Фиг.71. В данном положении узел 3430 рычажной передачи будет стремиться удерживать узел 3400 возвратно-поступательной муфты в данном положении фиксации. Когда узел 3400 возвратно-поступательной муфты перемещают в положение фиксации, замыкающая трубка 3190 перемещается в дистальном направлении по несущему узлу 3102 и, тем самым, приводит размыкающую/смыкающую лапку 46 на упоре 40 в контакт с проксимальным концом подковообразного выреза 3194 в дистальном конце 3192 сегмента 3190 замыкающей трубки и, тем самым, поворачивает упор 40 в сомкнутое (сжатое) положение. Для дополнительного удерживания узла 3400 возвратно-поступательной муфты в сомкнутом положении можно применить вышеописанный механизм 301 фиксации.
Как указано выше, в данных различных вариантах осуществления настоящего изобретения применяется оригинальный и новаторский узел 4000 отводящего штока, который дает врачу возможность контроля продвижения при прошивном и отводящем ходах, а также обеспечивает возможность ручного отведения прошивной планки 4030. Как можно видеть на Фиг.72, узел 4000 отводящего штока содержит отводящий шток 4010, который установлен на штифтах с возможностью скольжения на толкающий стержень 4020. В частности, отводящий шток 4010 содержит сквозной удлиненный паз 4012, который выполнен в размер для вмещения с возможностью скольжения двух штифтов 4014 для соединения отводящего штока 4010 с толкающим стержнем 4020. К проксимальному концу 4011 отводящего штока 4010 может быть прикреплена отводящая ручка 4016.
Толкающий стержень 4020 имеет дистальный конец 4022, который выполнен с возможностью сопряжения с проксимальным концом удлиненной прошивной планки 4030. Как показано на Фиг.72, проксимальный конец 4032 прошивной планки 4030 имеет соединительный участок 4034, сформированный на нем, который выполнен с размером для сопряжения с соответственно сформированным соединительным вырезом 4024 в дистальном конце 4022 толкающего стержня 4020. Следовательно, толкающий стержень 4020 можно использовать для аксиального проталкивания прошивной планки 4030 в дистальном направлении для прошивного хода или вытягивания прошивной планки 4030 в проксимальном направлении для отводящего хода. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что прошивная планка 4030 продолжается через несущий узел 3102. В альтернативных вариантах осуществления прошивная планка 4030 может иметь прямоугольную, квадратную и т.п. форму в сечении и соединяться с дистальным концом 31 узла 30 ножа, как описано выше, или соединяться с ножевыми планками различных типов и другими компонентами концевого эффектора, которые требуют аксиального перемещения для приведения в действие концевого эффектора.
На Фиг.72-77 представлены различные виды узла 3400 возвратно-поступательной муфты. Как можно видеть на данных фигурах, левый участок 3404 возвратно-поступательной муфты содержит две разнесенных вертикальных опорных стенки 3416 и 3418, которые образуют между собой проем 3420 под толкающий стержень. Дистальный конец 4022 толкающего стержня 4020 продолжается через проем 3420 под толкающий стержень для соединения с проксимальным концом 4032 прошивной планки 4030. Как можно видеть на Фиг.72, проксимальный конец 4026 толкающего стержня 4020 соединен с Z-образной соединительной деталью 4040. В частности, проксимальный конец 4026 толкающего стержня может содержать соединительный шпенек 4028, выступающий из него, который может вмещаться в отверстие 4049 в соединительной лапке 4042 на проксимальном конце 4041 Z-образной соединительной детали 4040. Смотри Фиг.72. Однако проксимальный конец 4026 толкающего стержня 4020 можно крепить к соединительной лапке 4042 винтом или другими подходящими крепежными деталями. Дистальный конец 4045 Z-образной соединительной детали 4040 содержит дистальную соединительную лапку 4046 на данном конце, которая выполнена с возможностью присоединения к поршневому цилиндру 5040, выступающему из узла 5000 пневмоприводного цилиндра.
Как можно видеть на Фиг.79, узел 5000 цилиндров может содержать первый кожух 501 цилиндра, который имеет первый закрытый проксимальный конец 5012 и первый открытый дистальный конец 5014, который открыт в первый аксиальный проход 5016 в первом 5010 кожухе цилиндра. Узел 5000 цилиндра содержит также второй кожух 5020 цилиндра, который имеет второй проксимальный конец 5022 и второй открытый дистальный конец 5024, который открыт во второй аксиальный проход 5026. Второй проксимальный конец 5022 имеет первую поршневую головку 5028, сформированную на нем, которая выполнена в такой размер относительно первого аксиального прохода 5016, чтобы создавать, по существу, воздухонепроницаемое скользящее уплотнение к первой стенке 5011 первого кожуха 5010 цилиндра для образования первой области 5015 цилиндра между дистальной стороной первого проксимального конца 5012 и проксимальной стороной первой поршневой головки 5028. Первый дистальный конец 5014 первого кожуха 5010 цилиндра дополнительно содержит продолжающийся внутрь первый фланец 5017, сформированный на нем для создания, по существу, воздухонепроницаемого скользящего уплотнения к внешней поверхности стенки второго кожуха 5020 цилиндра и, тем самым, образования второй области 5018 цилиндра между проксимальной стороной первого фланца 5017 и дистальной стороной первой поршневой головки 5028.
Сквозь первую поршневую головку 5028 обеспечен первый проход 5027. Как также можно видеть на Фиг.79, поршневой цилиндр 5040 продолжается через второй открытый дистальный конец 5024 второго кожуха 5020 цилиндра и во второй аксиальный проход 5026. Поршневой цилиндр 5040 имеет проксимальный конец 5042 и закрытый дистальный конец 5044. Вторая поршневая головка 5046 сформирована на проксимальном конце 5042 поршневого цилиндра 5040. Вторая поршневая головка 5046 выполнена в такой размер относительно второго аксиального прохода 5026, чтобы создавать, по существу, воздухонепроницаемое скользящее уплотнение ко второй стенке 5021 второго кожуха 5020 цилиндра для образования третьей области 5032 цилиндра. Второй дистальный конец 5024 второго кожуха 5020 цилиндра дополнительно содержит продолжающийся внутрь второй фланец 5025, сформированный на нем для создания, по существу, воздухонепроницаемого скользящего уплотнения к поршневому цилиндру 5040 и, тем самым, образования четвертой области 5034 цилиндра между проксимальной стороной второго фланца 5025 и дистальной стороной второй поршневой головки 5030. Сквозь вторую поршневую головку 5046 обеспечено отверстие 5047 в проход 5048 в поршневом цилиндре 5040.
Как можно видеть на Фиг.79 и 80, узел 5000 цилиндра установлен внутри корпусного узла 300. Первая подводящая линия или подводящая трубка 5050 продолжается от направляющего распределителя 610 в узле 300 рукоятки для подсоединения к первому проксимальному концу 5012 первого кожуха 5010 цилиндра, чтобы подводить сжатый газ через первое подводящее проходное отверстие 5013 или отверстие в первом проксимальном конце 5012 первого кожуха 5010 цилиндра. Кроме того, вторая подводящая линия или подводящая трубка 5052 продолжается от направляющего распределителя 610 к первому кожуху 5010 цилиндра вблизи его дистального конца 5014 для подведения сжатого газа во вторую область 5018 цилиндра через второе проходное отверстие 5029. Смотри фиг.78.
Ниже, со ссылками на Фиг.78 и 79, поясняется выдвижение и отведение прошивной планки 4030. Как можно видеть на Фиг.78, подводящие линии 5050 и 5052 подсоединены к обычному направляющему распределителю 1610, который является частью системы 1600 силового привода, установленной в корпусе 300 рукоятки. Направляющий распределитель 1610 содержит секцию 1620 положения для хода вперед, секцию 1630 останова и секцию 1640 хода назад. Секции 1620, 1630, 1640 распределителя можно переключать вручную нажимными кнопками 1612 и 1614, которые выступают через корпус 300 рукоятки. В различных вариантах осуществления применяется сменный источник 620 сжатого газа. Смотри Фиг.71 и 81-83. Однако специалисты со средним уровнем компетентности в данной области техники должны понимать, что возможно также эффективное применение несменных/перезаряжаемых источников (баллонов) со сжатым газом. В других вариантах осуществления узел 300 рукоятки может быть снабжен проходным отверстием 616 для подведения сжатого газа из внешнего источника 618 сжатого газа. Например, аппарат 3010 может быть подсоединен к больничной магистрали 618 сжатого воздуха посредством гибкой подводящей линии 617. Смотри Фиг.81A.
Сжатый газ протекает из баллона 622 (или внешнего источника 618 давления) по подводящей линии 650 в обычный регулятор 660 расхода. Как, в частности, можно видеть на Фиг.78, регулятор 660 расхода связан с соединительной тягой 662 питания, которая соединена с рычагом 670 включения. В различных вариантах осуществления рычаг 670 включения установлен смежно с рычагом 310 прошивки, который соединен с возможностью поворота с узлом 300 рукоятки шарнирным пальцем 370, который продолжается между правым корпусным элементом 320 и левым корпусным элементом 330. Нажим на рычаг 670 включения внутрь к рычагу 310 прошивки вынуждает регулятор 660 расхода пропускать больше сжатого газа, протекающего через него в подводящую линию 680, проведенную в направляющий распределитель 1610. В зависимости от положения направляющего распределителя 1610 сжатый газ будет протекать в одну из подводящих линий 5050 или 5052. Например, когда направляющий распределитель 1610 включается врачом для выдвижения прошивной планки 30, распределитель 1610 переключается в положение для хода вперед, так что канал 1622 хода вперед пропускает поток сжатого газа из подводящей линии 680 в подводящую линию 5050. Газ, протекающий по подводящей линии 5050, поступает в первую область 5015 цилиндра через первое подводящее проходное отверстие 5013 в закрытом конце 5012 и через отверстие 5027 в первой поршневой головке 5028 и в третью область 5032 цилиндра. Сжатый газ, поступающий в третью область 5032 цилиндра, проходит также через отверстие 5047 во второй поршневой головке 5046 в полый поршневой цилиндр 5040 и вытесняет поршневой цилиндр 5040 в дистальном направлении. Газ, находящийся в четвертой области 5034 цилиндра, выпускается из нее через выпускное отверстие 5023 во второй кожух 5020 цилиндра. Аналогично газ, находящийся во второй области 5018 цилиндра, имеет возможность выходить из нее через второе отверстие 5029 во вторую подводящую линию 5052. Вторая подводящая линия 5052 транспортирует выпущенный газ в канал 1624 в направляющем распределителе 1610, откуда газ, в конечном счете, выпускается через выпускной канал 1632. Непрерывная подача сжатого газа в первую область 5015 цилиндра, третью область 5032 цилиндра и проход 5048 в поршневом цилиндре 5040 вынуждает поршневой цилиндр 5040 выдвигаться в дистальном направлении, как показано на Фиг.73 и 79. Когда поршневой цилиндр 5040 выдвигается в дистальном направлении, Z-образный соединитель 4040 также выдвигается в дистальном направлении вследствие его соединения с дистальным концом 5044 поршневого цилиндра 5040. Z-образный соединитель 4040 продвигает толкающий стержень 4020 в дистальном направлении, который продвигает также прошивную планку 4030 в дистальном направлении. Когда прошивная планка 4030 перемещается в дистальном направлении, прикрепленный к ней дистальный концевой участок 31 узла 30 ножа продвигается вперед через кассету 50 для отрезания ткани, зажатой в концевом эффекторе 12, и выталкивания скобок. Как только узел 30 ножа выдвинется в его крайнее дистальное положение в концевом эффекторе 12, врач прекращает подачу сжатого газа отпусканием рычага 670 включения.
Данный вариант осуществления также может быть снабжен средством для указания, когда узел 30 ножа достиг своего крайнего дистального положения в кассете 50. В частности, может быть обеспечена дистальная управляющая линия 1772 от подводящей линии 650 к дистальному концевому переключателю 1770. Между дистальным концевым переключателем 1770 и направляющим распределителем 1610 обеспечена линия 1774 дистального концевого переключателя. Следовательно, когда узел 30 ножа закончит прошивной ход, дистальный концевой переключатель 1770 ориентирован относительно участка узла 5000 цилиндра так, что он включается данным участком. Дистальный концевой переключатель 1770 позволяет воздуху протекать под давлением от подводящей линии 650 в линию 1774 дистального концевого переключателя и в направляющий распределитель 1610, что, в различных вариантах осуществления, вызывает автоматическое переключение направляющего распределителя 1610 в положение для хода назад, что, как поясняется ниже, вызывает отведение прошивной планки 4030. В различных вариантах осуществления с линией 1774 дистального концевого переключателя (или дистальным концевым переключателем 1770) может сообщаться первый воздушный свисток 1790 или другое подходящее звукогенерирующее устройство, чтобы, когда дистальный концевой переключатель 1770 включается в конце прошивного хода, воздух, проходящий по линии 1774 дистального концевого переключателя, включал первый свисток 1790 для выдачи врачу звукового сигнала, указывающего, что узел 30 ножа достиг конца прошивного хода. В альтернативных вариантах осуществления вместо свистка 1790 возможно применение реле давления, манометров и т.п. для снабжения врача указанием, когда узел 30 ножа достиг конца прошивного хода.
Для пневматического отведения прошивной планки 4030 врач может нажать кнопку 1612, чтобы переключить распределитель 1610 в положение для хода назад, и начинает нажимать на рычаг 670 включения, что приведет к протеканию сжатого газа во вторую подводящую линию 5052. Газ, протекающий по второй подводящей линии 5052, поступает во вторую область 5018 цилиндра, что вызывает отведение второго кожуха 5020 цилиндра в проксимальном направлении в первый кожух 5010 цилиндра. Газ в первой области 5015 цилиндра имеет возможность выпуска через первое подводящее отверстие 5013 в первую подводящую линию 5040. Газ, проходящий по первой подводящей линии 5040, входит в направляющий распределитель 1610, из которого он выпускается через выпускное отверстие 1632. После того как сжатый газ, поступающий во вторую область 5018 цилиндра, вызовет отведение второго кожуха 5020 цилиндра в первый кожух 5010 цилиндра, газ, проходящий через второе отверстие 5029, может пройти через выпускное отверстие 5023 в первом кожухе 5010 цилиндра и в четвертую область 5034 цилиндра. Когда сжатый газ поступает в четвертую область 5034 цилиндра, вторая поршневая головка 5046 подтягивает поршневой цилиндр 5040 в проксимальном направлении во второй кожух 5020 цилиндра. Газ в третьей области 5032 цилиндра проходит через первое отверстие 5027 в первую область 5015 цилиндра, из которой он выпускается вышеописанным образом. В то время как поршневой цилиндр 5040 отводится, Z-образный соединитель 4040 перемещается в проксимальном направлении и тянет за собой толкающий стержень 4020 и прошивную планку 4030, которая присоединена к нему.
В различных вариантах осуществления проксимальная управляющая линия 1662 может продолжаться также между проксимальным концевым переключателем 1660 и подводящей линией 650. Проксимальный концевой переключатель 1660 ориентирован относительно узла цилиндра 5000 или соединителя 4040 так, чтобы, когда прошивная планка 4030 полностью отводится, проксимальный концевой переключатель 1760 включался и тогда давал ход воздуху в линию 1764 проксимального концевого переключателя и в направляющий распределитель 1610 и, тем самым, вызывал автоматическое переключение направляющего распределителя 1610 в положение для останова. В альтернативных вариантах осуществления с проксимальным концевым переключателем 1760 может сообщаться второй воздушный свисток 1792 или другое подходящее звукогенерирующее устройство, чтобы, когда проксимальный концевой переключатель 1760 включается в конце отводящего хода, газ, проходящий по линии 1764 проксимального концевого переключателя, включал второй свисток 1792 для выдачи врачу другого звукового сигнала, указывающего, что прошивная планка 4030 и ножевой участок 30 достигли конца отводящего хода. В других вариантах осуществления, например, с дистальным и проксимальным концевыми переключателями 1770, 1760 могут быть связаны светоизлучающие диоды или другие сигнальные устройства с питанием от аккумуляторов, чтобы выдавать пользователю другое показание, когда клиновидный скользящий блок/нож достиг конца прошивного хода и/или отводящего хода. Специалистам со средним уровнем компетентности в данной области техники должно быть ясно, что, если во время прошивного хода врачу потребуется остановить прошивной ход и отвести прошивную планку и нож, то все, что врач должен сделать, это переключить вручную распределитель 1610 в положение для хода назад.
В вышеописанных примерах врач не пользовался оригинальным и новаторским узлом 4000 отводящего штока данного варианта осуществления настоящего изобретения. Узел отводящего штока дает несколько преимуществ. Во-первых, если в течение прошивного или отводящего ходов пневматическая энергия неожиданно пропадает вследствие, возможно, опорожнения питающего баллона 620 или, в другом случае, вследствие случайного перерыва подачи сжатого газа, то врач может вручную отвести прошивную планку (и узел 30 ножа) просто ручным переключением распределителя 1610 в положение для хода назад и захватом отводящей ручки 4016, соединенной с проксимальным концом отводящего штока, и оттягиванием штока в проксимальном направлении, пока прошивная планка не оказывается полностью отведенной. Смотри Фиг.83. Переключение распределителя 1610 в положение для хода назад обеспечивает возможность выпуска газа из узла цилиндра в то время, когда отводят ножевую планку.
Другим преимуществом, предоставляемым данным вариантом осуществления настоящего изобретения, является возможность визуального контроля выполнения прошивки прошивной планкой и ножевым участком в то время, когда они перемещаются в дистальном направлении во время прошивного хода. Данное преимущество можно получить просто оттягиванием отводящего штока в крайнее проксимальное положение, показанное на Фиг.83 перед началом прошивного хода. При нахождении в данном положении, когда узел 5000 цилиндра выдвигает соединитель 4040, толкающий стержень 4020 и прошивную планку 4030 в дистальном направлении, толкающий стержень 4020 тянет отводящий шток 4010 за собой в дистальном направлении благодаря штифтовому соединению с ним. В различных вариантах осуществления обеспечивается такая длина отводящего штока 4010, чтобы, когда прошивная планка 4030 выдвинута полностью, никакой участок отводящего штока 4010 не выступал из узла 300 рукоятки. Следовательно, врач может определять продвижение прошивной планки 4030 и узла 30 ножа путем наблюдения участка отводящего штока 4010, выступающего из узла 300 рукоятки.
В альтернативных вариантах осуществления, показанных на Фиг.72A и 83A, отводящий шток 4010 может быть снабжен, по меньшей мере, одним, но, предпочтительно, по меньшей мере, двумя вырезами 4015 для вмещения в них штифтов 4014. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что данная конструкция обеспечит врачу возможность визуального контроля продвижения прошивной планки 4030 и узла 30 ножа во время отводящего хода. В частности, когда прошивная планка 4030 отводится, толкающий стержень 4020 вынуждает отводящий шток 4010 выдвигаться в проксимальном направлении из корпусного узла 300 благодаря зацеплению штифтов 4014 в вырезах 4015. Следовательно, врач может оценивать расстояние, на которое продвинулась прошивная планка 4030 во время отводящего хода, наблюдением расстояния, на которое отводящий шток 4010 выступает из узла 300 рукоятки. Однако, когда аппарат не применяется, отводящий шток 4010 можно вдвинуть в узел рукоятки в положение, показанное на Фиг.81.
Выше приведено описание нескольких вариантов осуществления изобретения, однако, очевидно, что специалистами в данной области техники могут быть внесены разнообразные модификации, изменения и усовершенствования в данные варианты осуществления при достижении некоторых или всех преимуществ изобретения. Например, в соответствии с различными вариантами осуществления для выполнения данных функции или функций единственный компонент может быть заменен несколькими компонентами, и несколько компонентов может быть заменено единственным компонентом. Поэтому настоящая заявка предполагает охват всех подобных модификаций, изменений и усовершенствований, не выходящих за пределы объема и существа предложенного изобретения, определенных прилагаемой формулой изобретения.
Устройства, описанные в настоящей заявке, могут быть предназначены для выброса после единственного использования, или данные устройства могут быть предназначены для многократного использования. Однако в каждом случае устройство можно восстановить для повторного использования после, по меньшей мере, одного использования. Восстановление может включать в себя комбинацию этапов разборки устройства, последующую затем очистку или замену конкретных деталей и последующую повторную сборку. В частности, устройство можно разбирать, и любое число конкретных деталей или частей устройства можно селективно заменять или снимать в любой комбинации. После очистки и/или замены конкретных частей устройство может быть повторно собрано для последующего использования либо на ремонтном предприятии, либо хирургической бригадой непосредственно перед хирургической операцией. Специалистам со средним уровнем компетентности в данной области техники должно быть очевидно, что для восстановления устройства можно применять множество разных методов разборки, очистки/замены и повторной сборки. Как применение таких методов, так и получаемое восстановленное устройство находятся в пределах объема настоящей заявки.
Изобретение, описанное в настоящей заявке, будут предпочтительно подвергать обработке перед хирургической операцией. Во-первых, получают новый или бывший в употреблении аппарат и, при необходимости, очищают. Затем аппарат можно стерилизовать. По одному из методов стерилизации аппарат помещают в закрытую и герметичную тару, например, пакет из пластика или материала TYVEK®. Затем тару и аппарат помещают в поток излучения, которое может проникать сквозь тару, например, гамма-излучение, рентгеновское излучение или поток высокоэнергетических электронов. Радиация убивает бактерий на аппарате и в таре. Затем стерилизованный аппарат можно хранить в стерильной таре. Герметичная тара сохраняет стерильность аппарата, пока ее не вскрывают в медицинском учреждении.
Любые патент, публикация или другие данные, целиком или частично, которые упомянуты как включенные в настоящее описание путем отсылки, включены в настоящее описание только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании. По существу, и в необходимых пределах, сведения, приведенные в явном виде в настоящем описании, заменяют собой любые противоречащие данные, включенные в настоящее описание путем отсылки. Любые данные, или их часть, которые упомянуты как включенные в настоящее описание путем отсылки, но которые противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании, будут включаться только в таких пределах, в которых не возникает противоречия между упомянутыми включенными данными и существующими данными изобретения.
Изобретение, предполагаемое к охране, нельзя толковать как ограниченное конкретными описанными вариантами осуществления. Поэтому варианты осуществления следует считать наглядными, а неограничивающими. Другими специалистами могут быть созданы варианты и внесены изменения без выхода за пределы существа настоящего изобретения. Соответственно, прямо предполагается, что настоящим документом должны охватываться все такие эквиваленты, варианты и изменения, которые находятся в пределах существа и объема настоящего изобретения, определенных формулой изобретения.
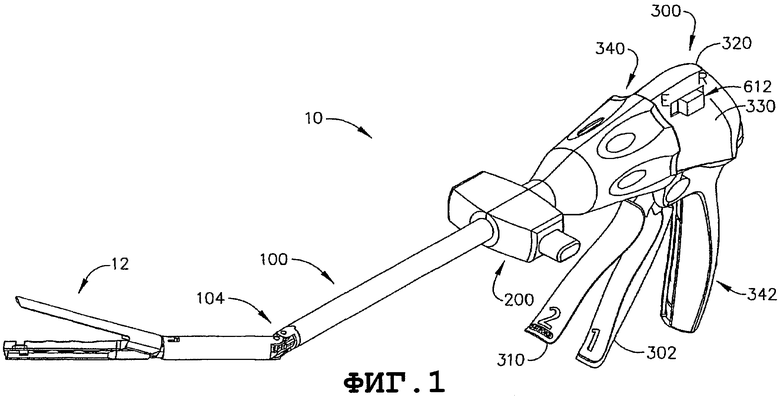
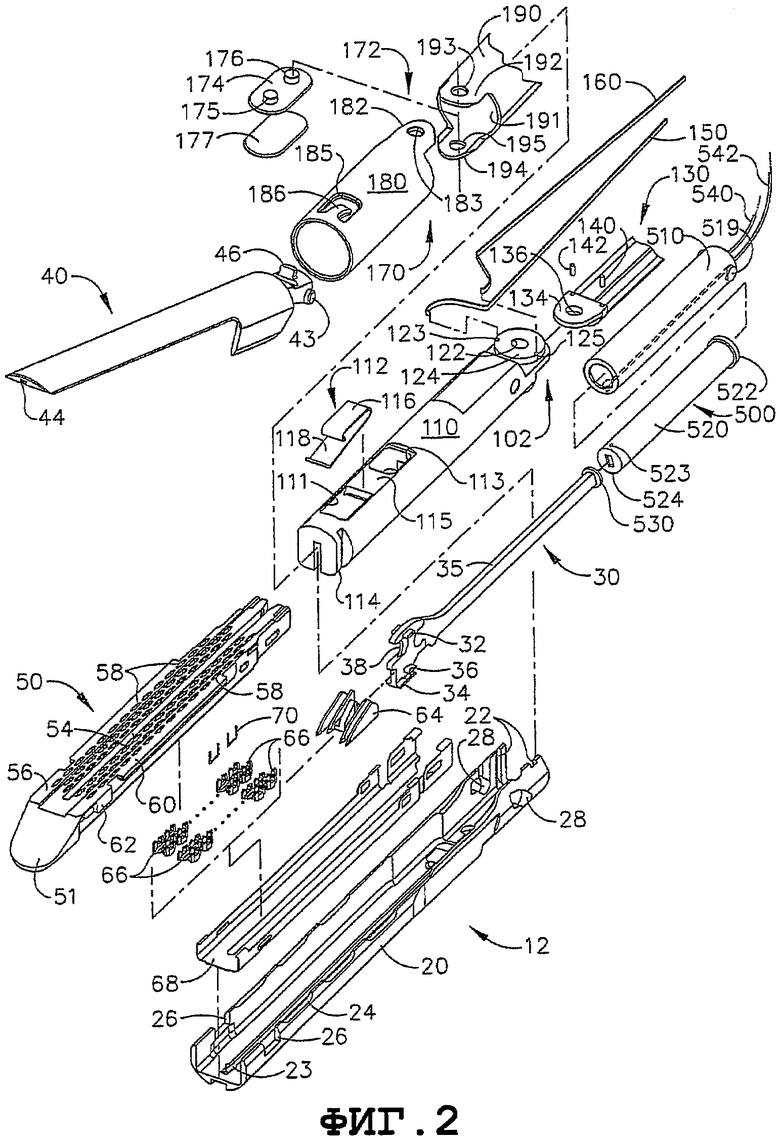
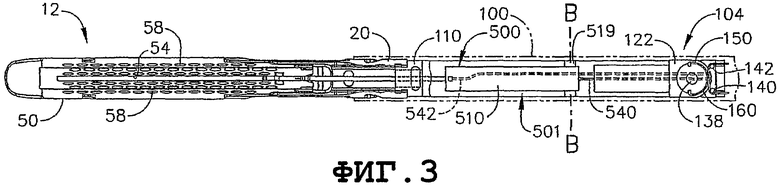
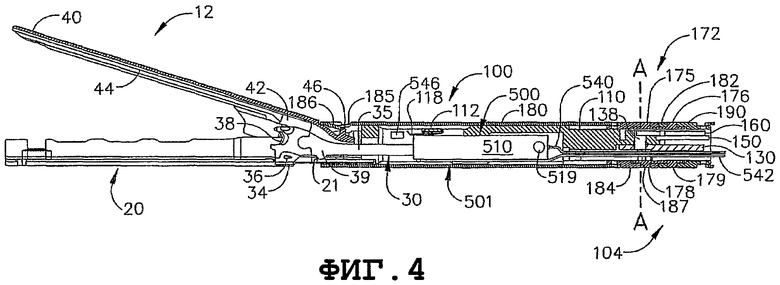
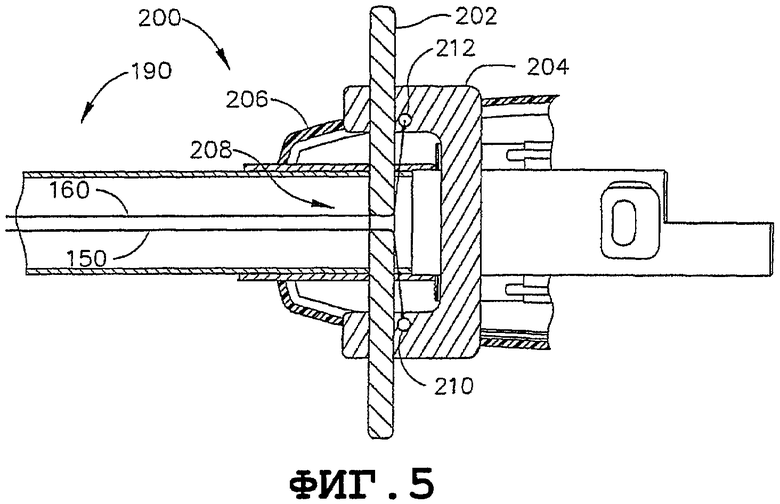


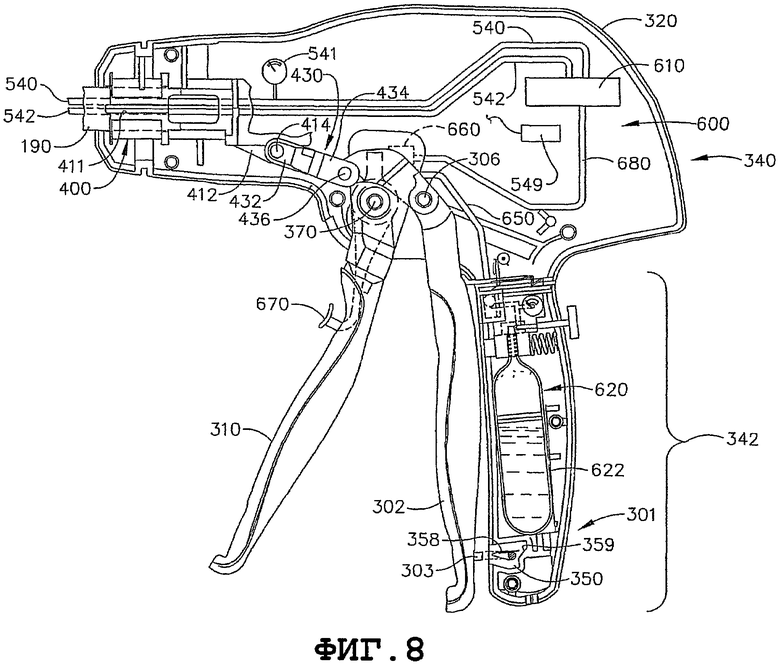
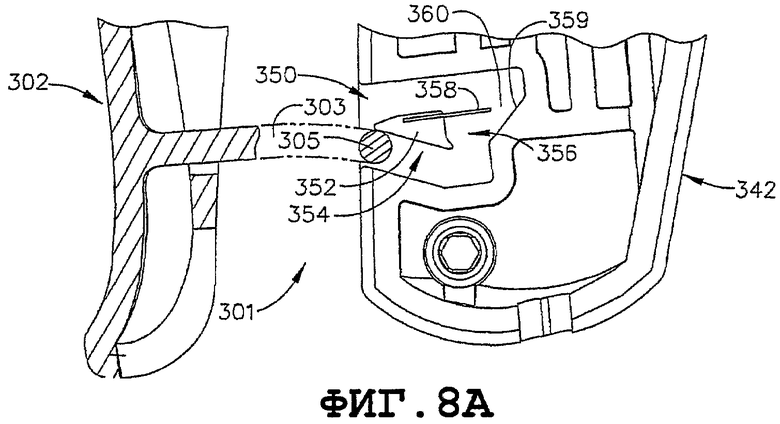




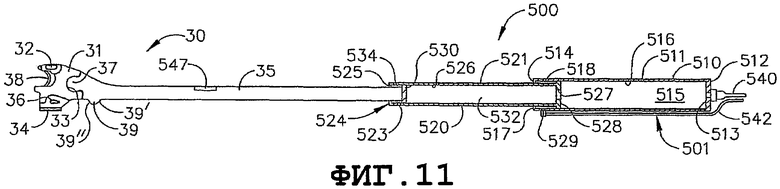
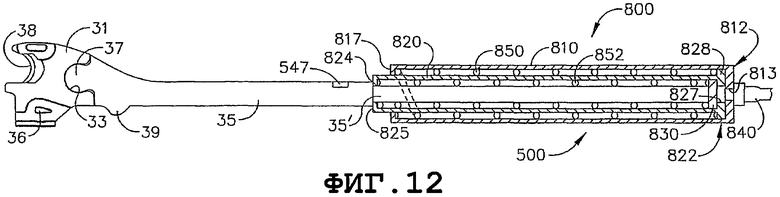

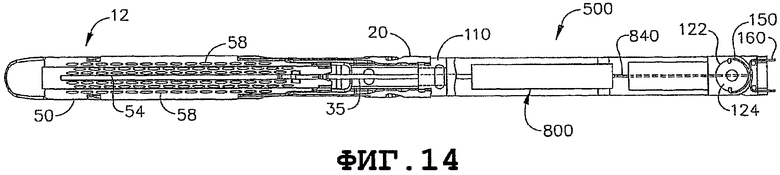
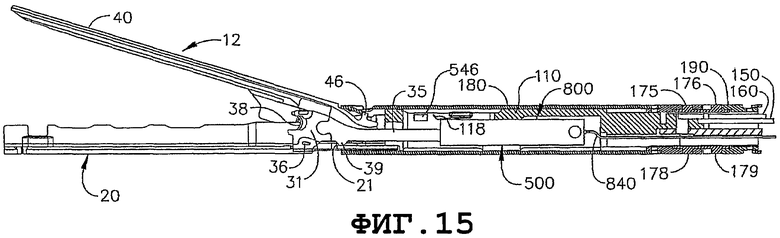
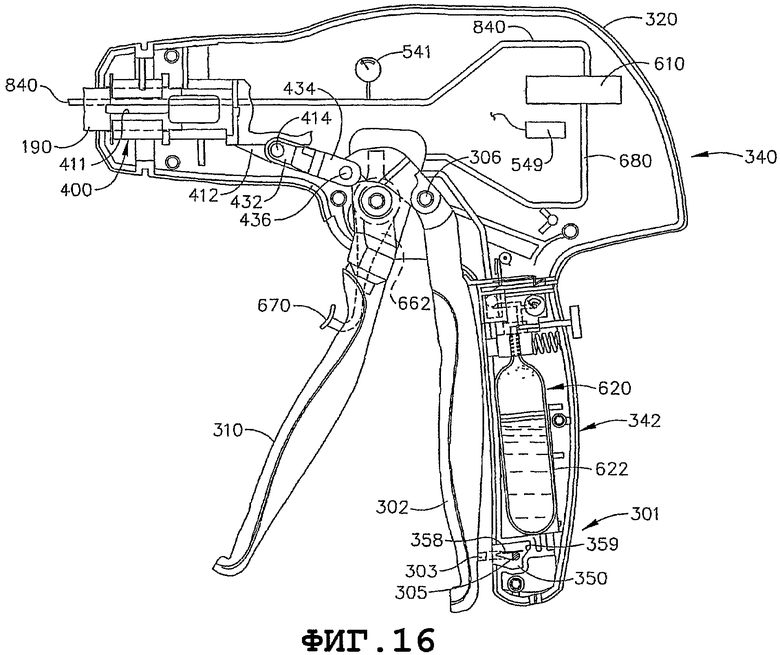
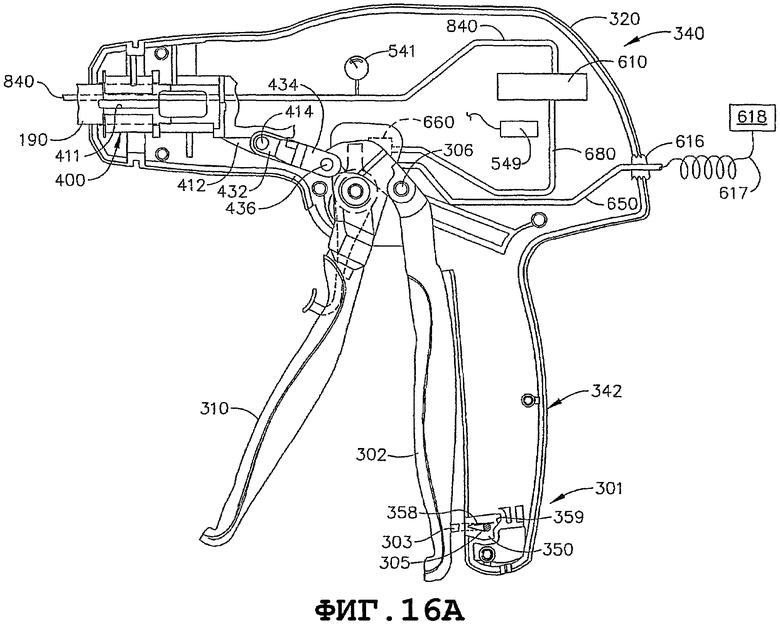
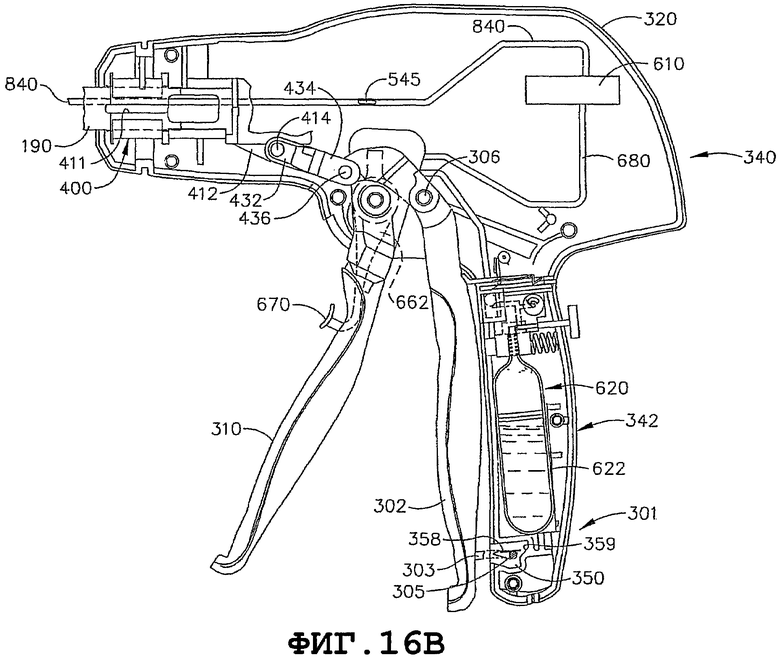

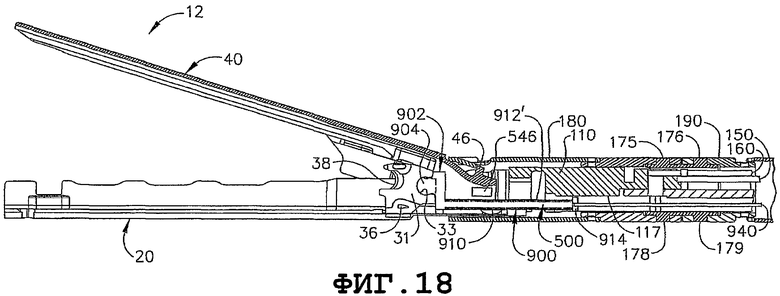
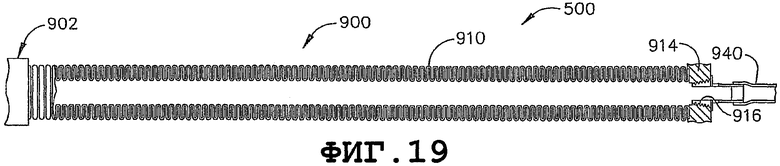

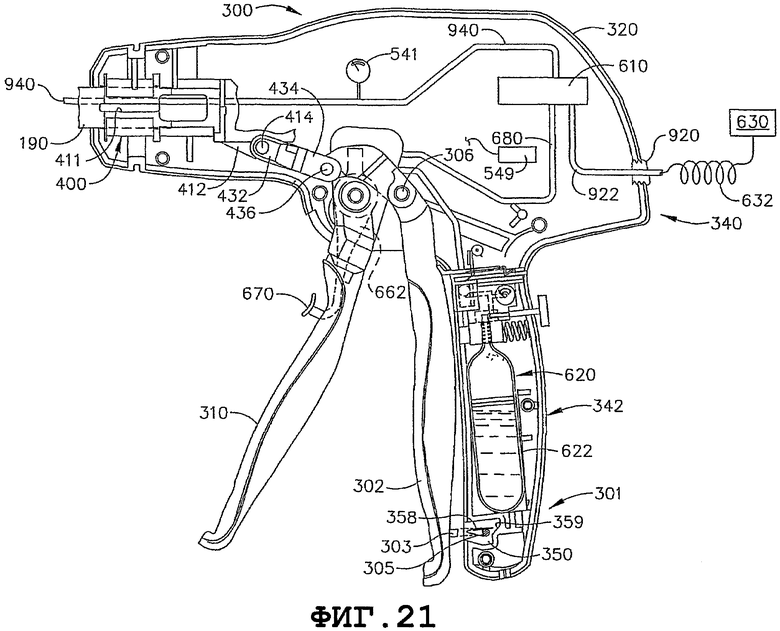
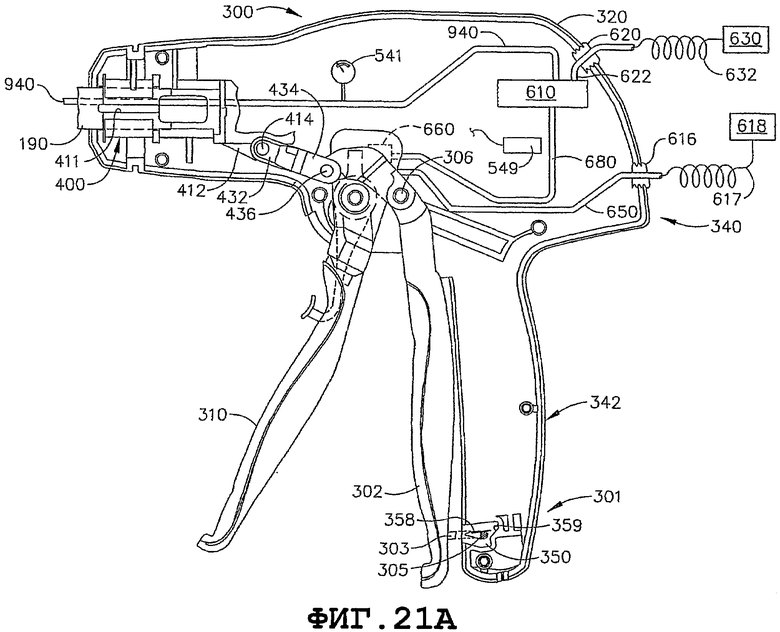
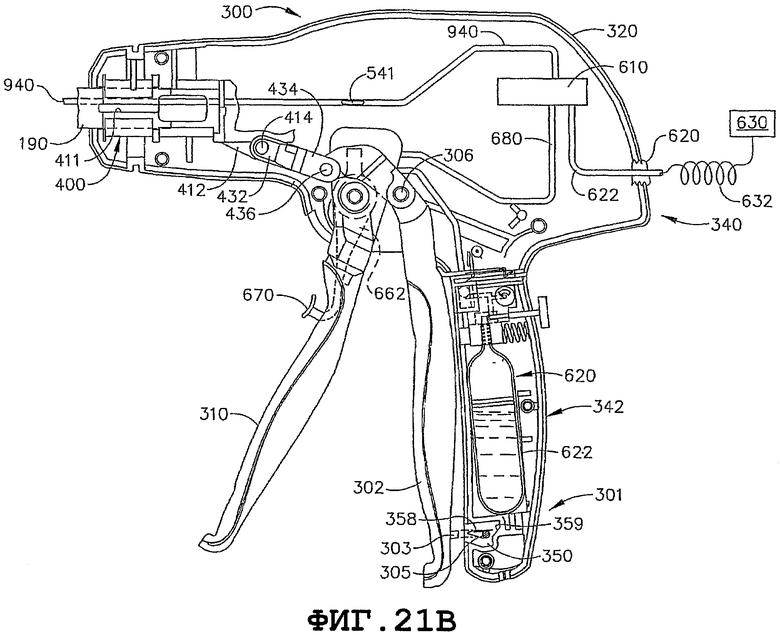



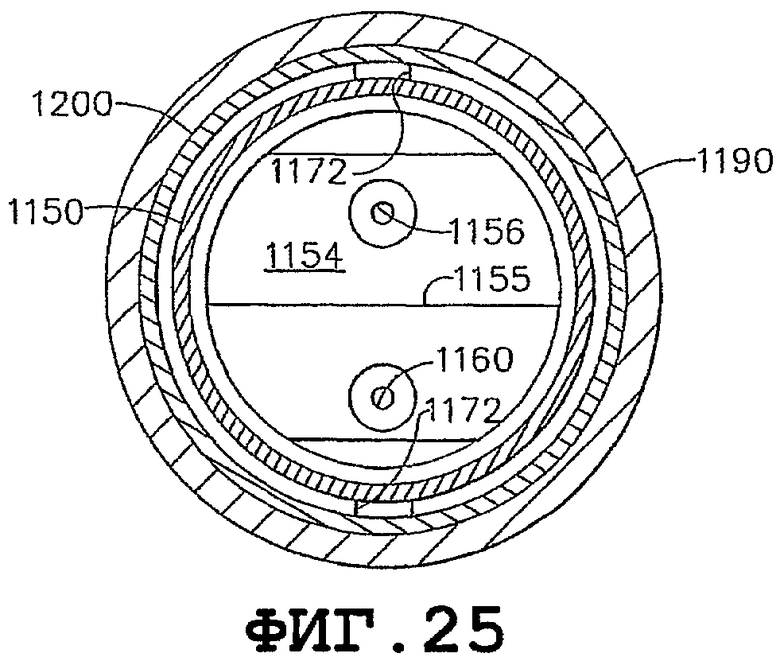


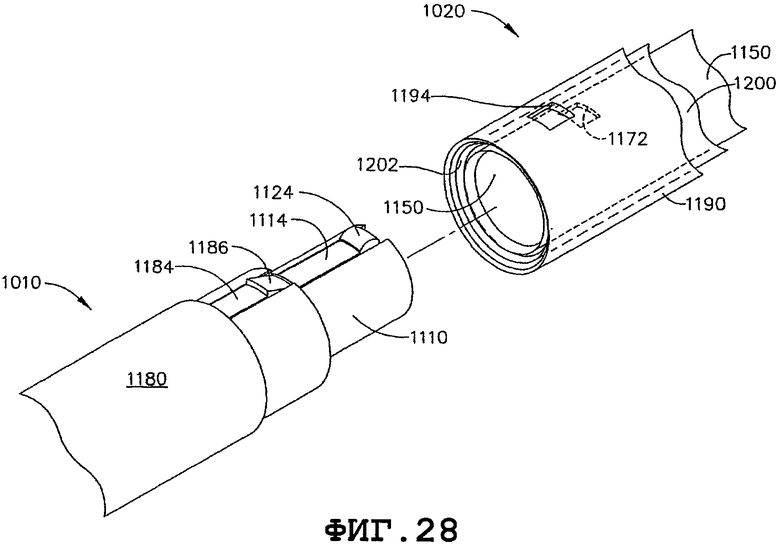


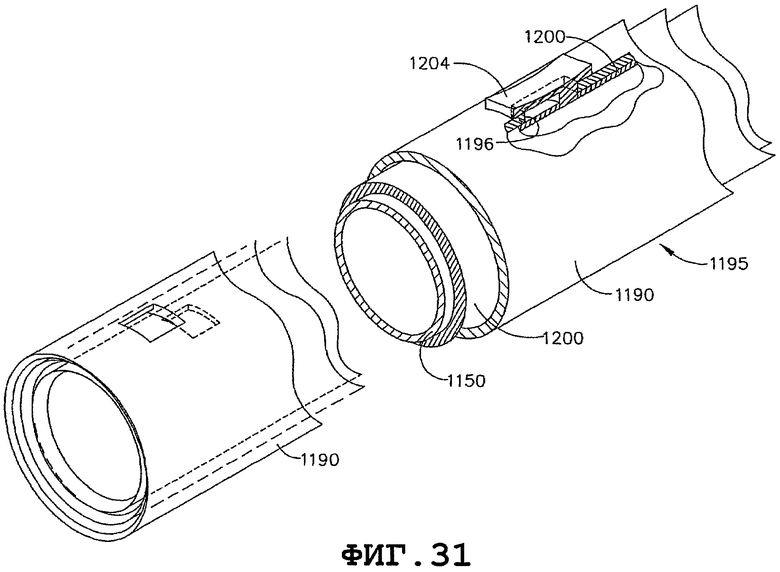

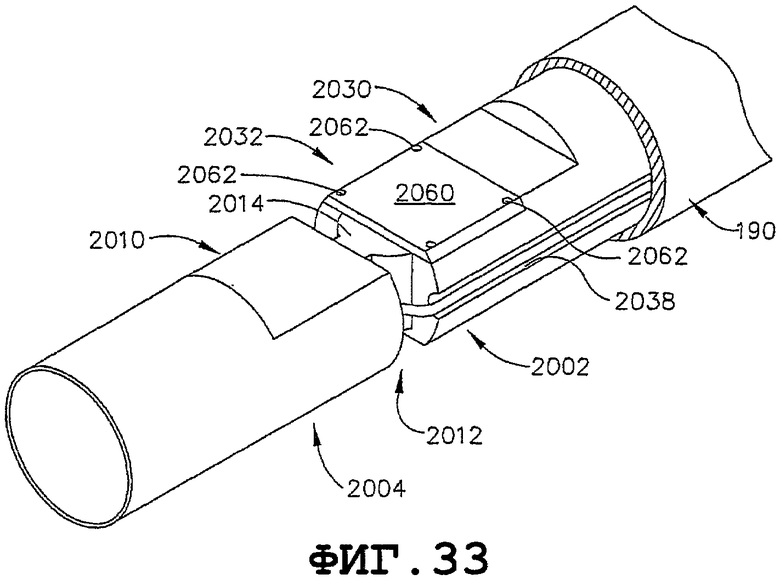
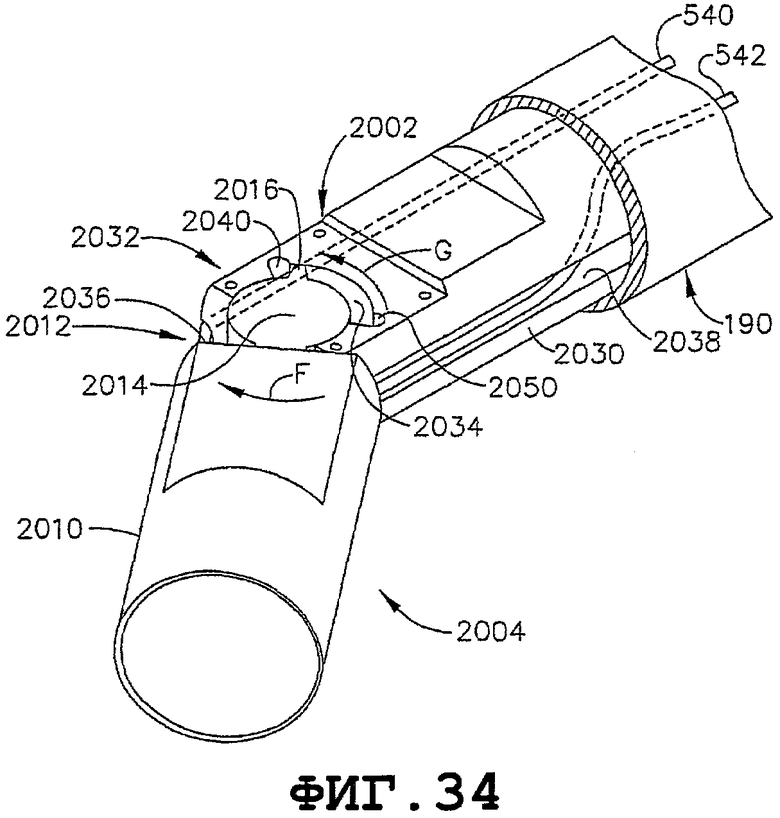

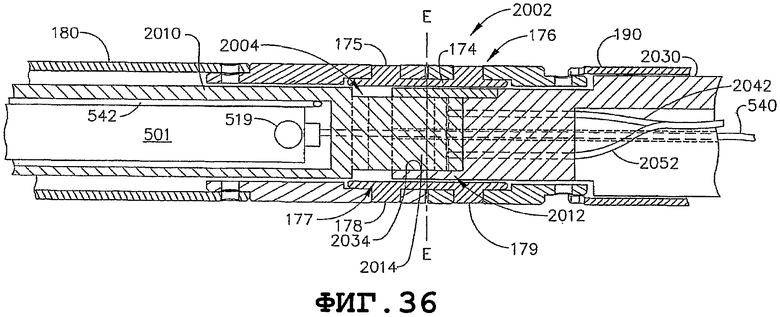
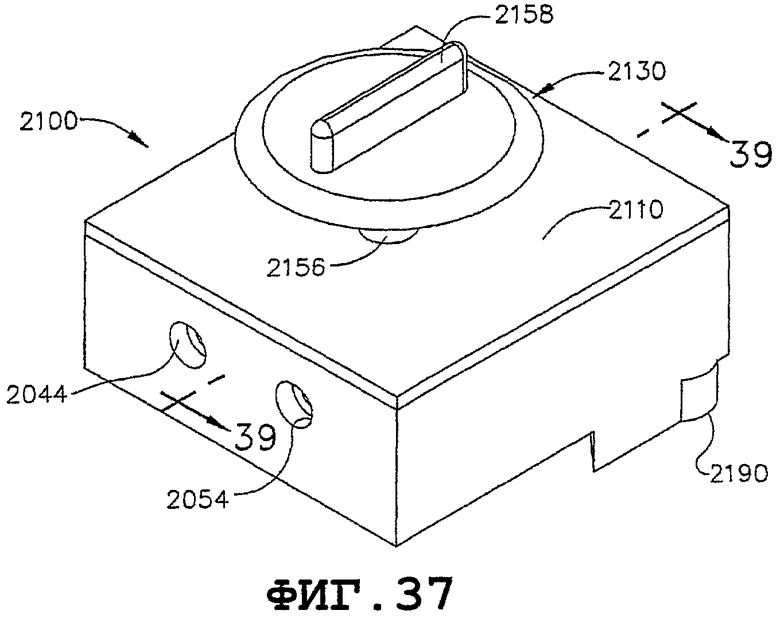

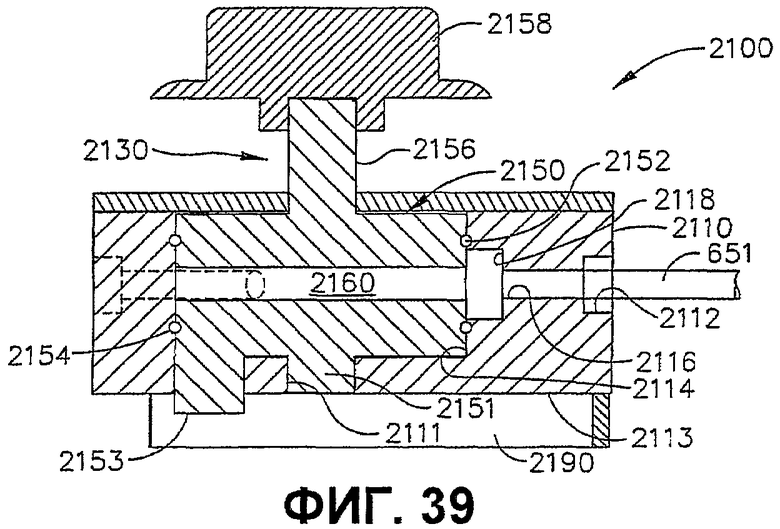


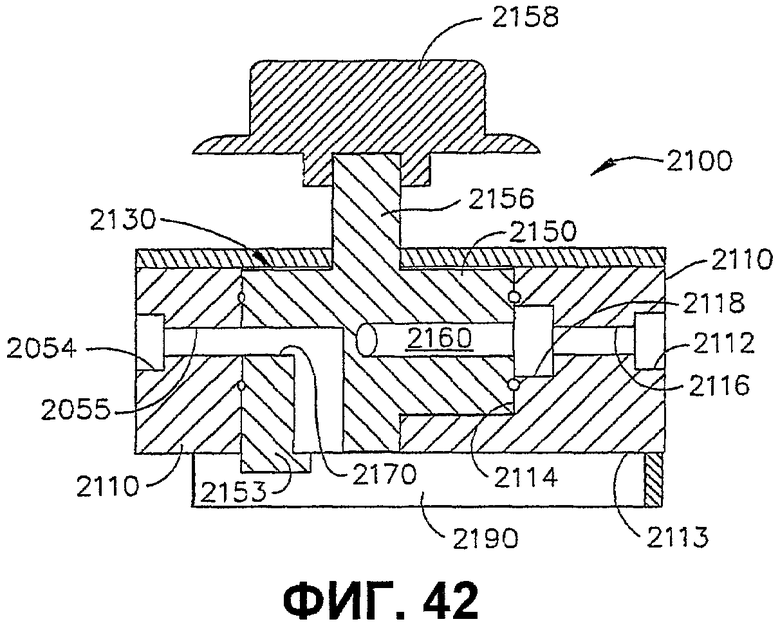

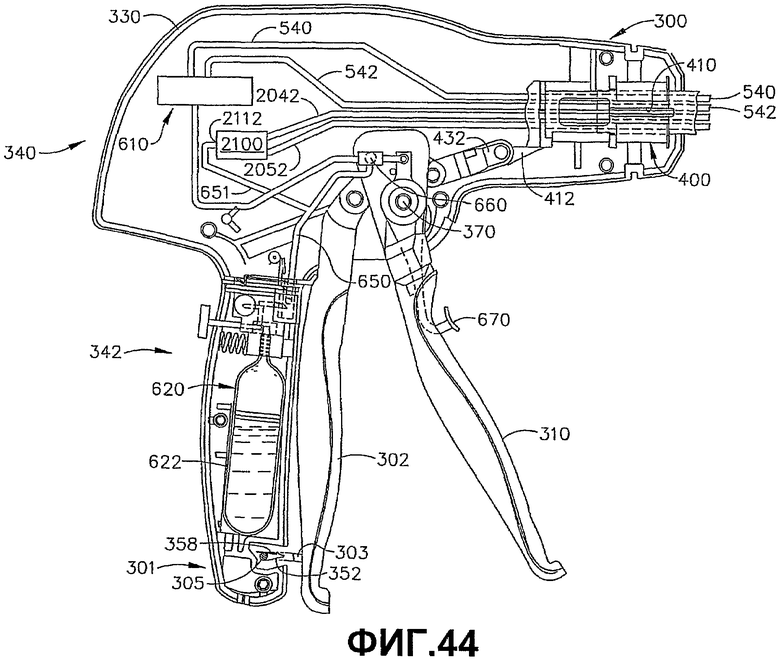



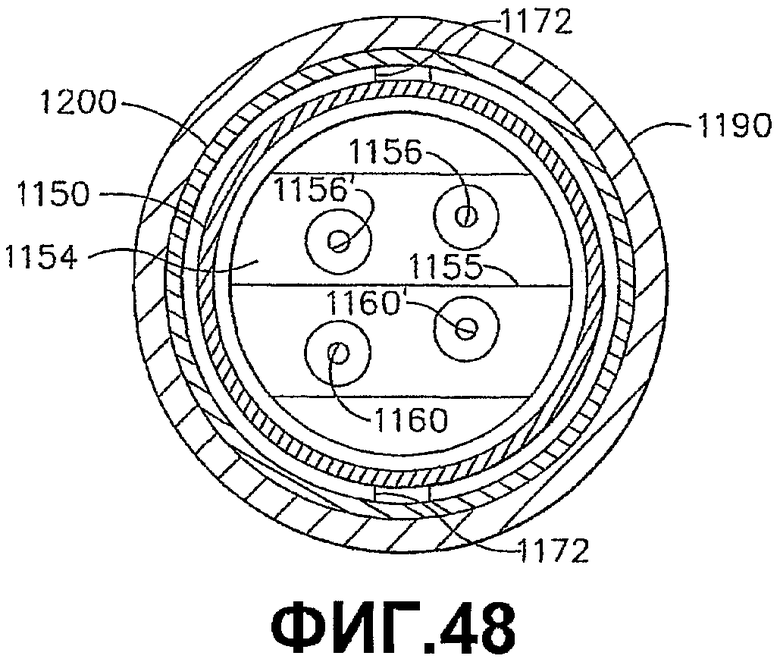

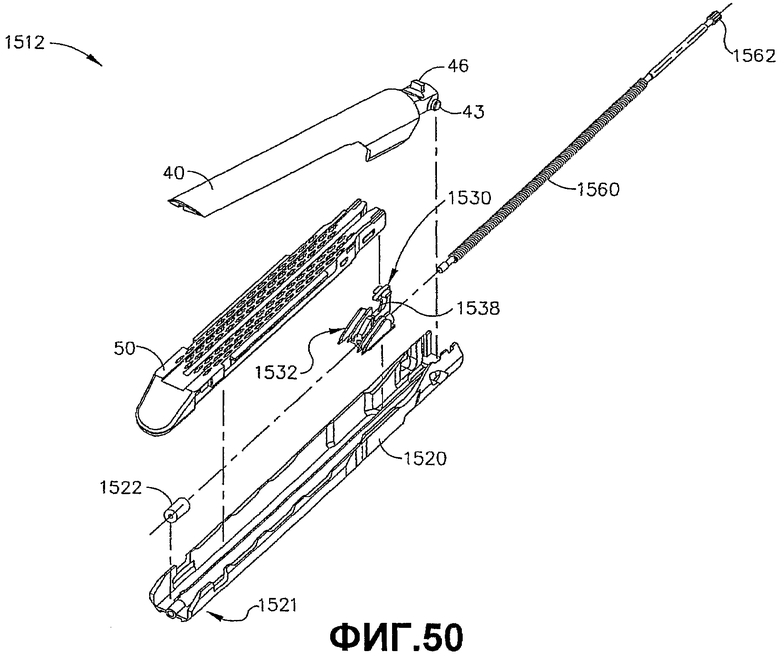
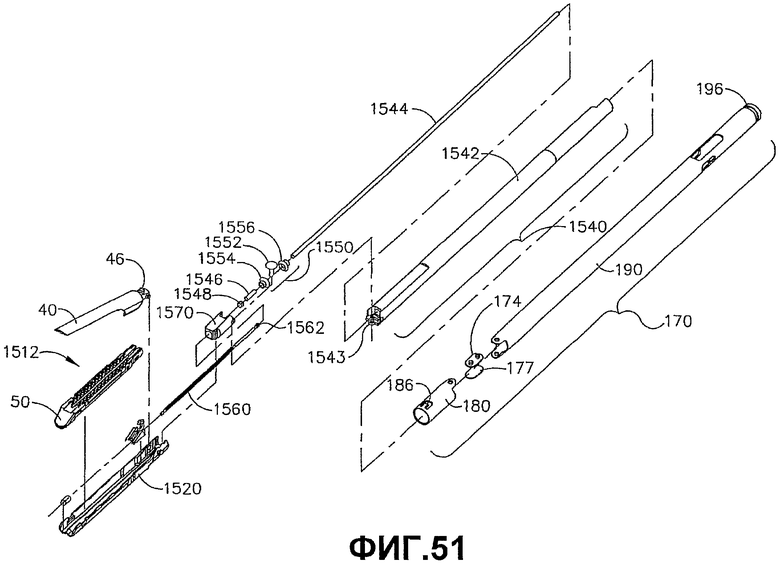



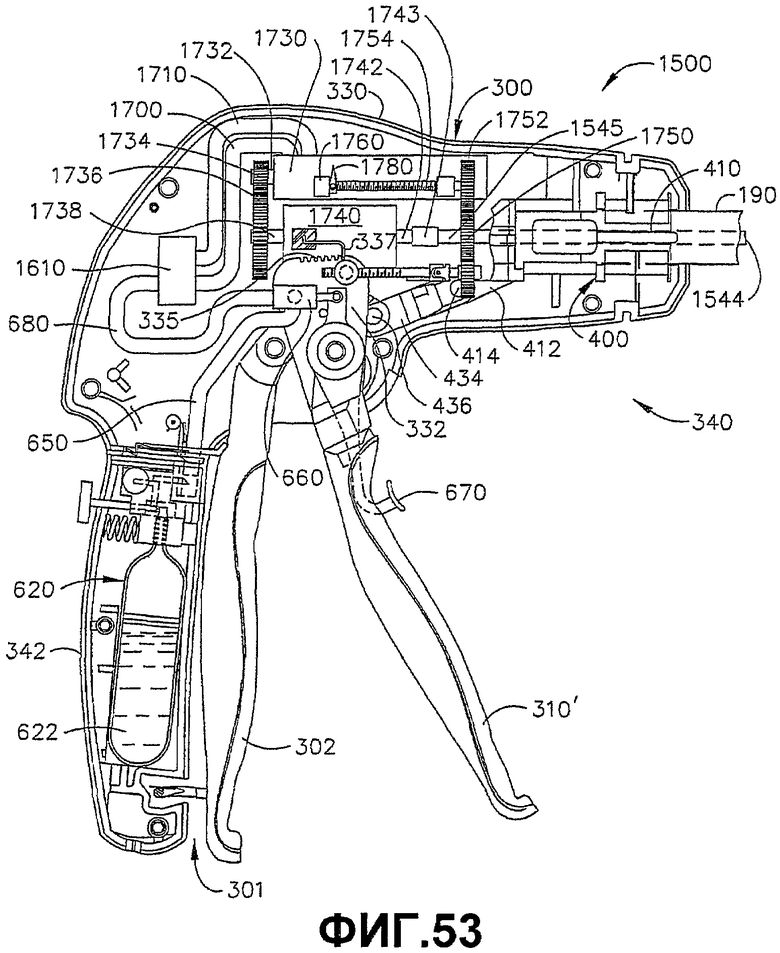


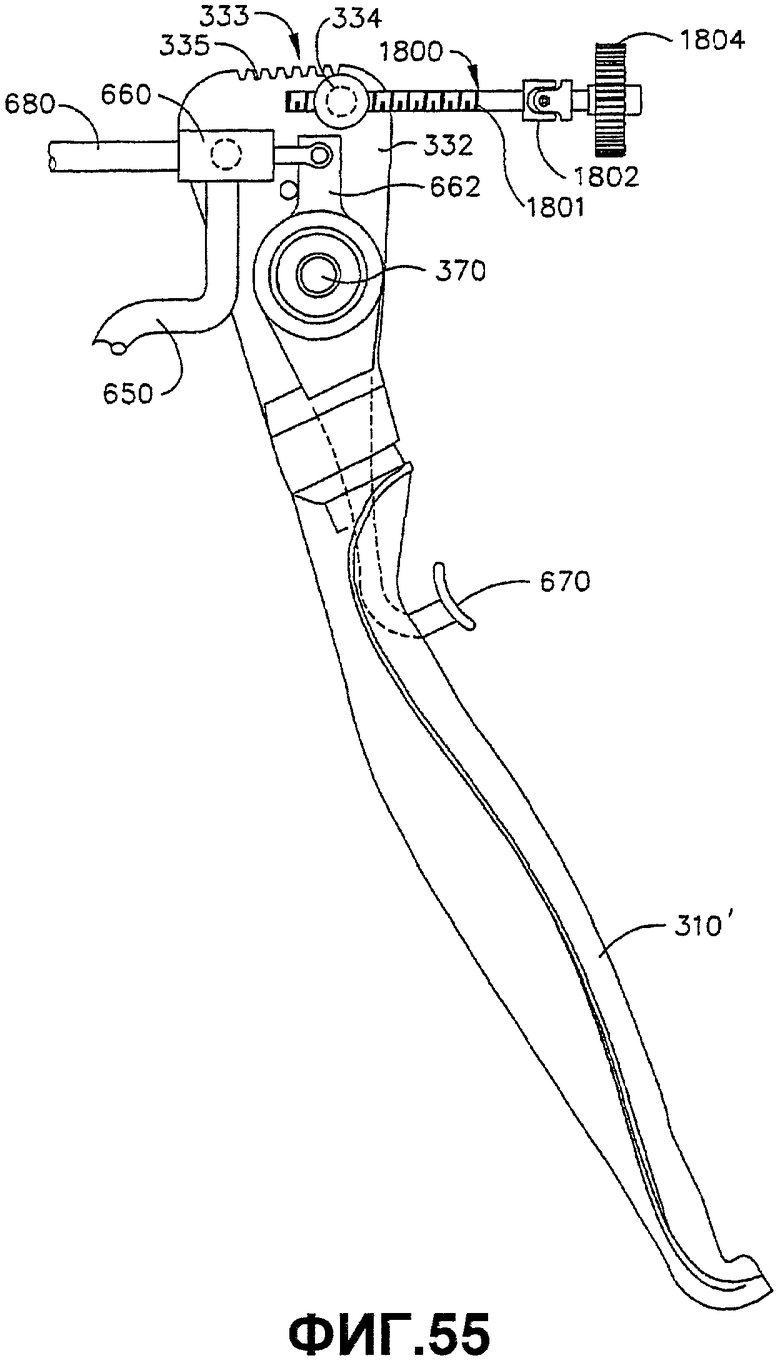

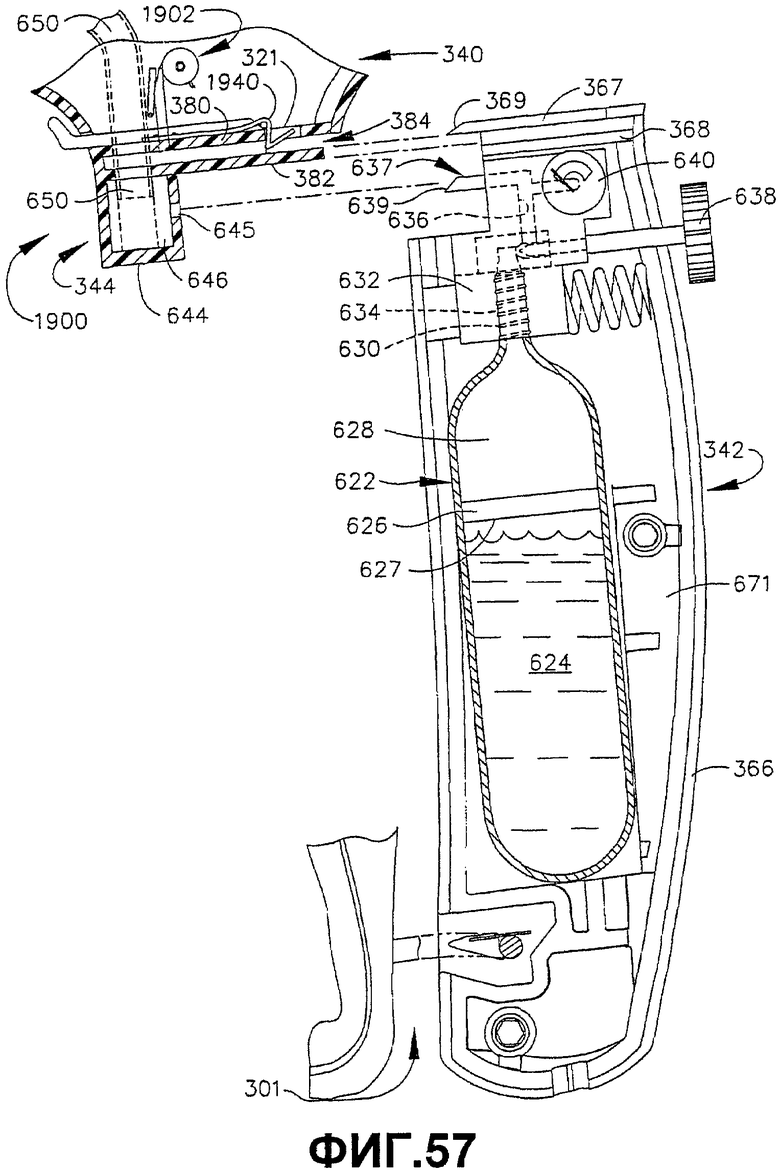


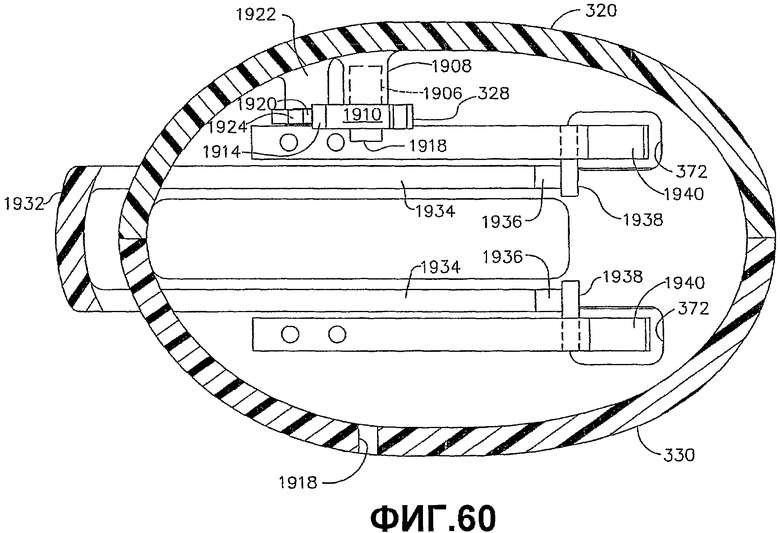
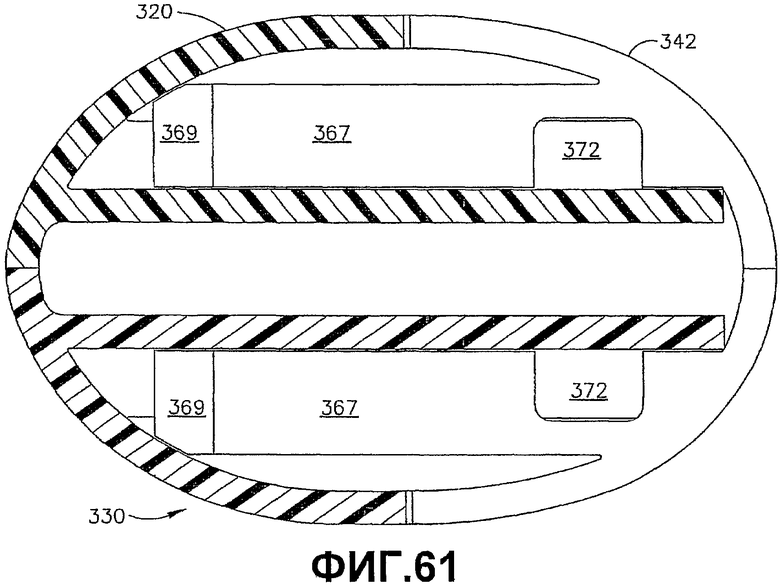



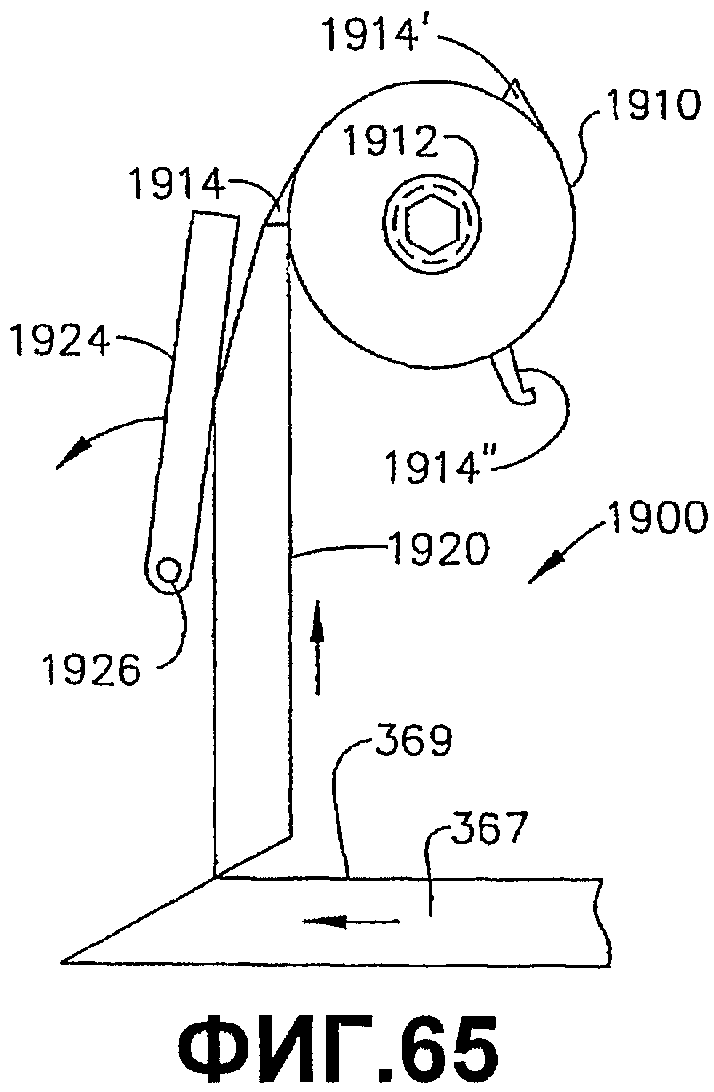
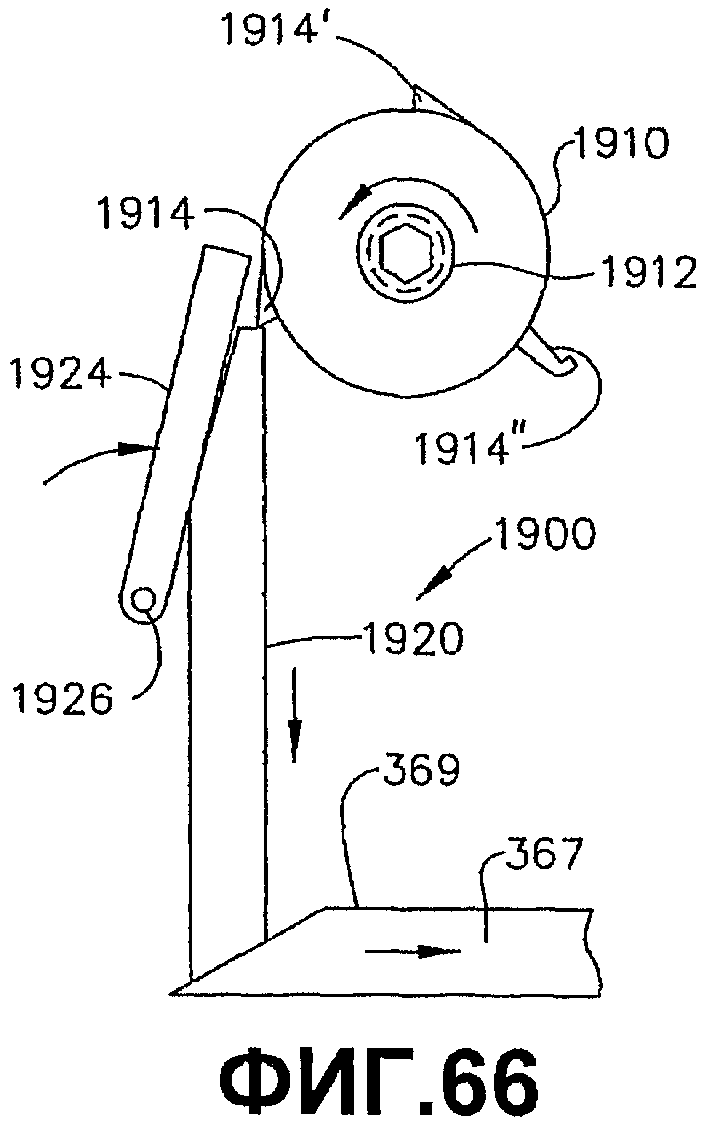


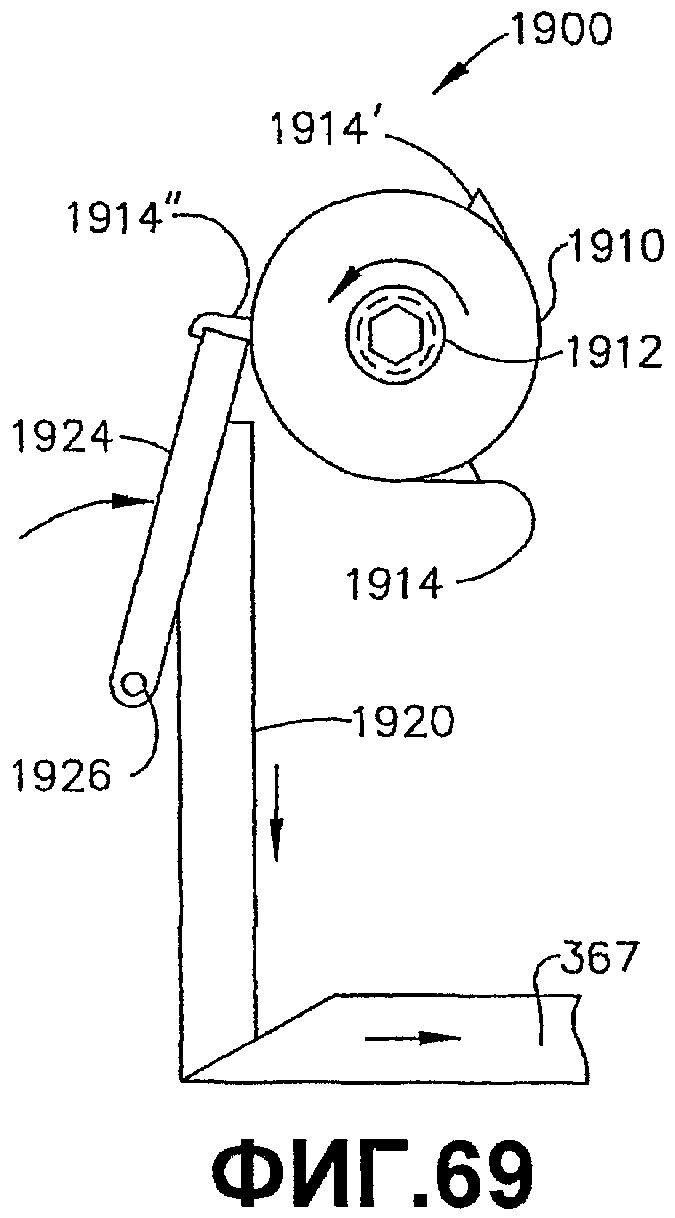



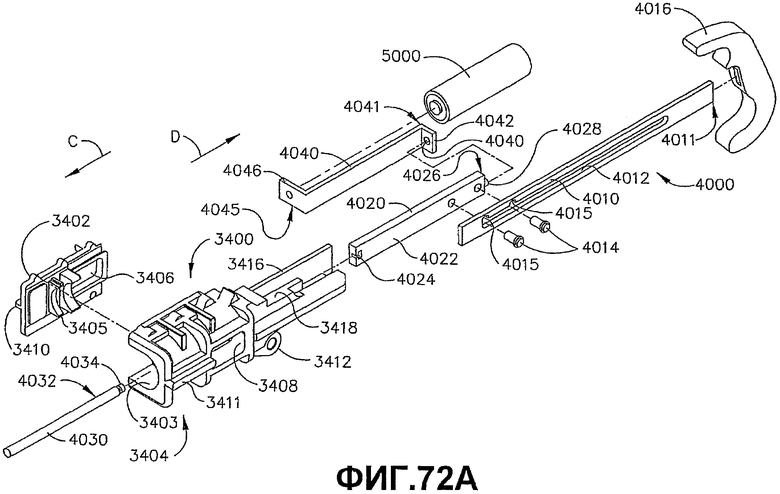



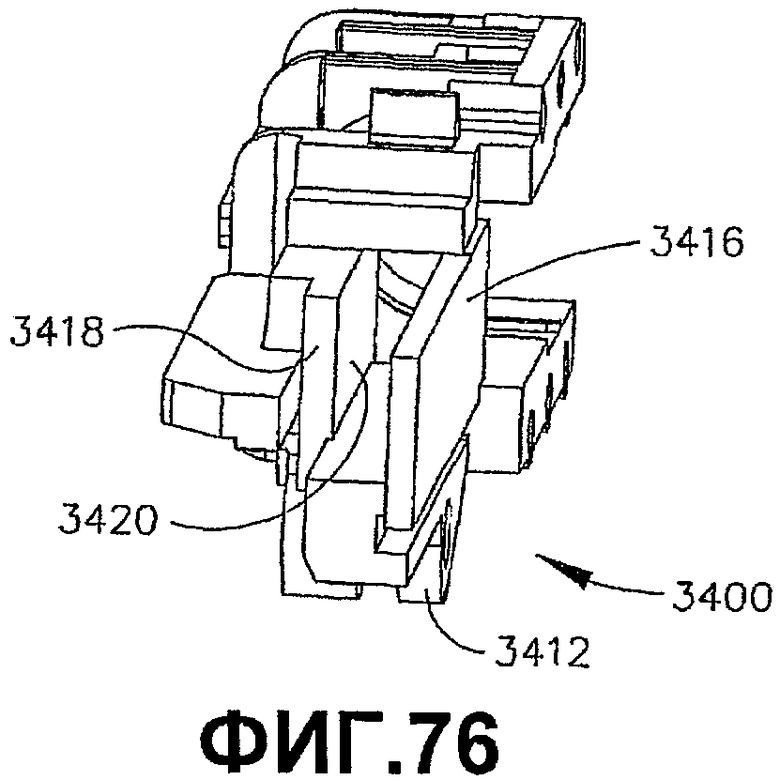

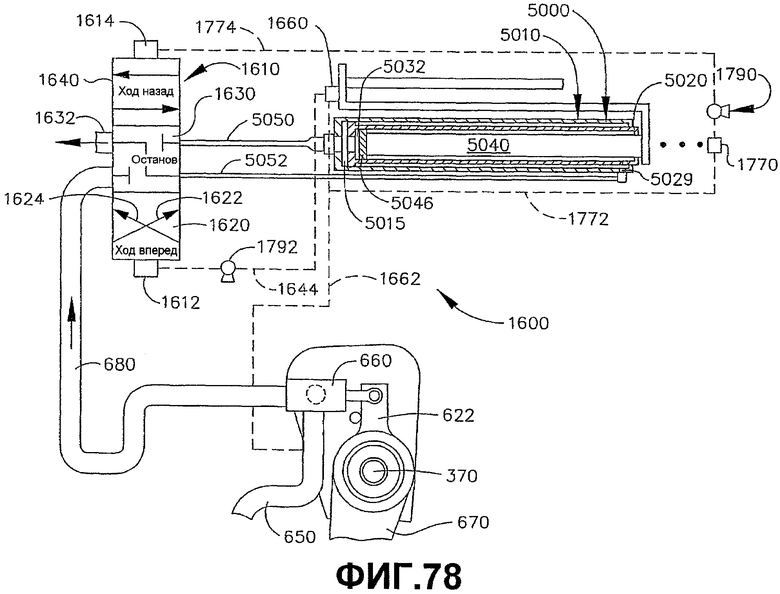
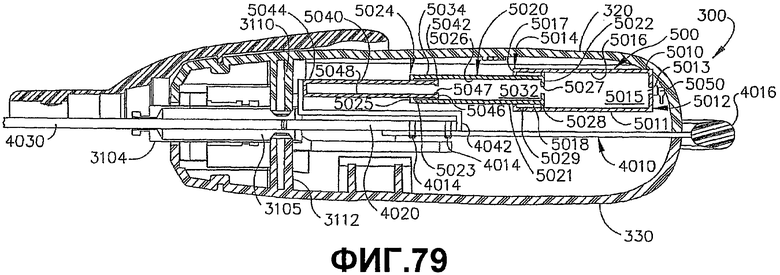

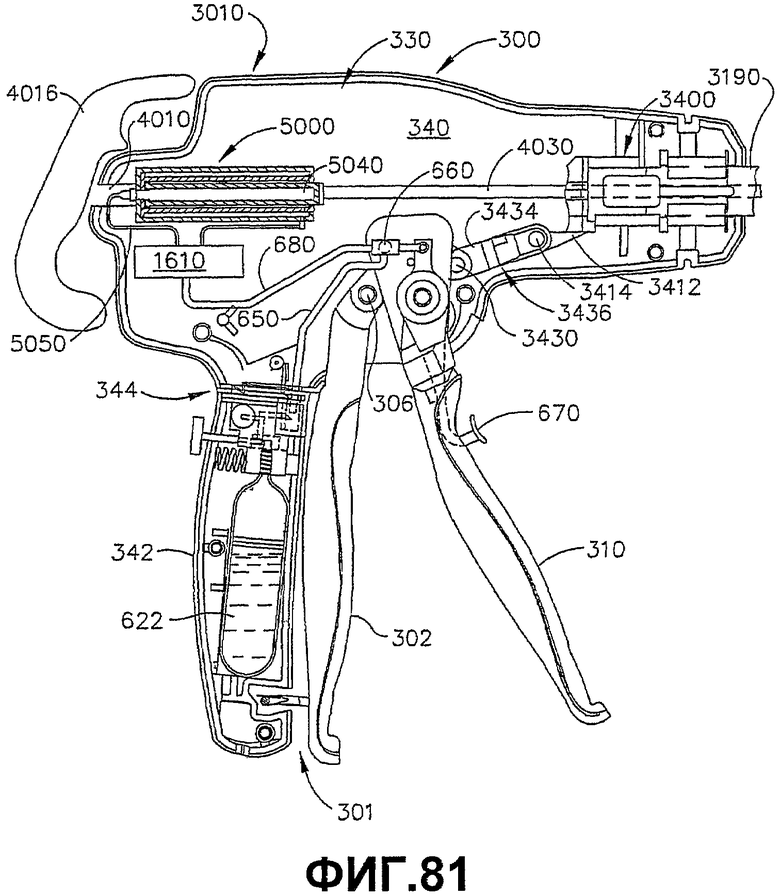

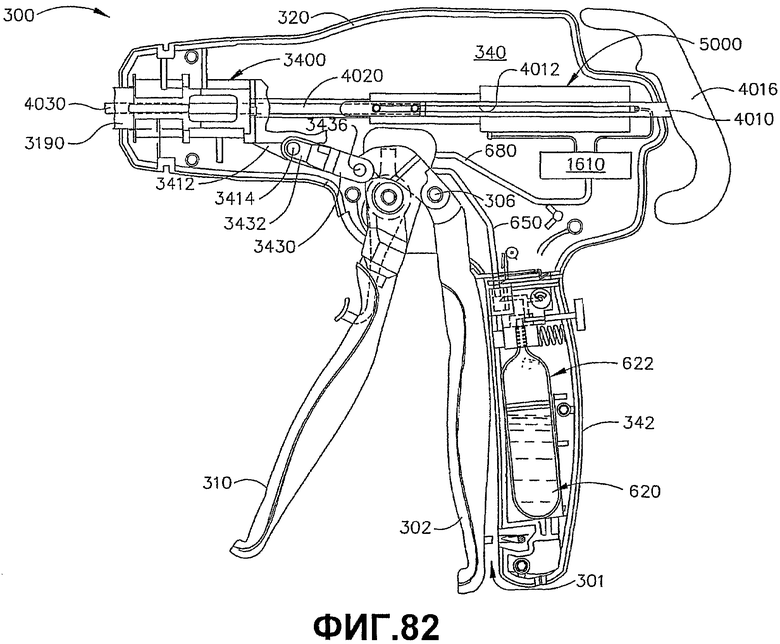
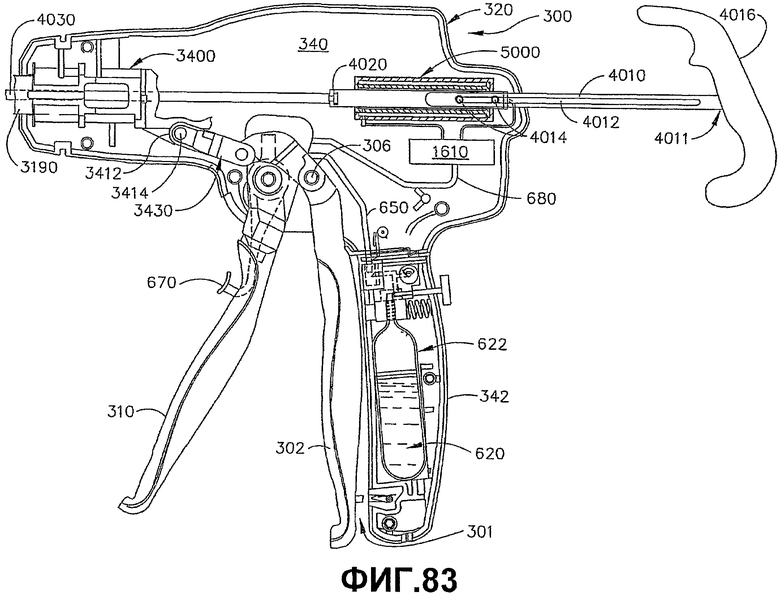
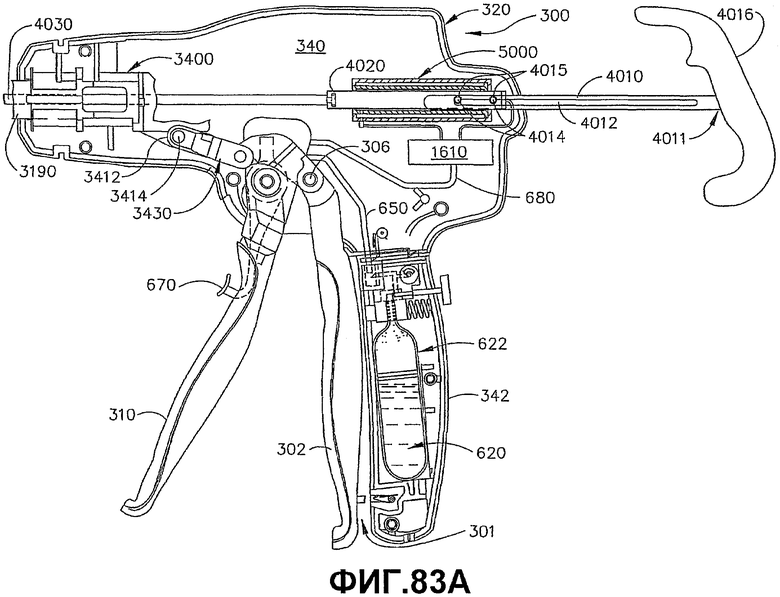
Группа изобретений относится к медицине. Хирургический аппарат содержит дистальный элемент, который выполнен с возможностью установки на нем узла пневмоприводного инструмента, и узел дистального стержня. Узел удлиненного стержня имеет дистальный концевой участок, который связан с дистальным элементом, и проксимальный концевой участок. Пневматический вращательный элемент привода установлен на дистальном концевом участке узла удлиненного стержня и может быть выполнен с возможностью сообщения, по меньшей мере, двух вращательных приводящих движений узлу пневмоприводного инструмента, при получении, по меньшей мере, одного пневматического управляющего сигнала из источника пневматической энергии. Пневматический элемент привода содержит пневмоприводной двигатель. В различных вариантах осуществления дистальный концевой участок узла удлиненного стержня может шарнирно поворачиваться относительно его проксимального концевого участка, и/или дистальный концевой участок узла удлиненного стержня допускает отсоединение от проксимального концевого участка. 3 н. и 8 з.п. ф-лы, 83 ил.
1. Хирургический аппарат, содержащий:
узел рукоятки;
смыкающий привод, установленный в упомянутом узле рукоятки и выполненный с возможностью создания замыкающего движения и размыкающего движения, исполнительный механизм, установленный в упомянутом узле рукоятки, при этом упомянутый исполнительный механизм сообщается с источником пневматической энергии для селективного создания, по меньшей мере, одного пневматического сигнала управления;
узел удлиненного стержня, соединенный с упомянутым узлом рукоятки и сообщающийся с упомянутым смыкающим приводом для передачи упомянутых размыкающего и замыкающего движений, а также упомянутого, по меньшей мере, одного пневматического сигнала;
пневматический вращательный элемент привода, установленный с возможностью функционирования на дистальном конце упомянутого узла удлиненного стержня и способный к реагированию на упомянутый, но меньшей мере, один пневматический сигнал управления, и выполненный с возможностью создания вращательного прошивного/отрезного движения и вращательного отводящего движения; и
концевой эффектор, соединенный с упомянутым узлом удлиненного стержня, при этом упомянутый концевой эффектор содержит:
удлиненный желоб, выполненный с размером для вмещения в нем кассеты для скобок;
упор, соединенный с возможностью поворота с упомянутым удлиненным желобом и способный к реагированию поворотом на упомянутые размыкающее и замыкающее движения от упомянутого узла удлиненного стержня; и
отрезной и сшивающий элемент, установленный с возможностью функционирования в упомянутом удлиненном желобе и способный к реагированию на упомянутые размыкающее и замыкающее движения от упомянутого вращательного элемента привода.
2. Хирургический аппарат по п.1, в котором упомянутый вращательный элемент привода содержит пневмоприводной двигатель.
3. Хирургический аппарат по п.1, в котором упомянутый дистальный концевой участок упомянутого узла удлиненного стержня соединен с возможностью поворота с упомянутым проксимальным концевым участком упомянутого узла удлиненного стержня шарнирно-поворотным сочленением.
4. Хирургический аппарат по п.3, в котором упомянутое шарнирно-поворотное сочленение приводится в движение механически.
5. Хирургический аппарат по п.3, в котором упомянутое шарнирно-поворотное сочленение приводится в движение пневматически.
6. Хирургический аппарат по п.1, в котором упомянутый дистальный концевой участок упомянутого узла удлиненного стержня допускает селективное отсоединение от упомянутого проксимального концевого участка упомянутого узла удлиненного стержня для создания возможности присоединения нового дистального концевого участка, содержащего присоединенный к нему новый концевой эффектор, к проксимальному концевому участку узла удлиненного стержня.
7. Хирургический аппарат по п.1, в котором упомянутый источник пневматической энергии расположен снаружи упомянутого узла рукоятки.
8. Хирургический аппарат по п.1, в котором упомянутый исполнительный механизм содержит:
элемент плавного регулирования потока, пневмогидравлически сообщающийся с упомянутым источником пневматической энергии и упомянутым вращательным элементом привода; и
рычаг включения, установленный с возможностью функционирования на упомянутом узле рукоятки и соединенный с возможностью функционирования с упомянутым элементом плавного регулирования потока для селективного управления им.
9. Хирургический аппарат, содержащий:
узел рукоятки;
узел удлиненного стержня, имеющий проксимальный концевой участок, соединенный с возможностью функционирования с упомянутым узлом рукоятки, при этом упомянутый участок удлиненного стержня дополнительно имеет дистальный концевой участок;
средство для установки с возможностью функционирования узла пневмоприводного инструмента, соединенного с упомянутым узлом удлиненного стержня; и
средство для создания, по меньшей мере, одного вращательного приводящего усилия для приложения к пневмоприводному инструменту, установленному на упомянутое средство для установки с возможностью функционирования, в ответ на, по меньшей мере, один пневматический управляющий сигнал из источника пневматической энергии,
пневмогидравлически связанного с упомянутым средством для создания, причем упомянутое средство для создания установлено на упомянутом дистальном конце упомянутого узла удлиненного стержня.
10. Хирургический аппарат по п.9, в котором упомянутый источник пневматической энергии установлен в упомянутом узле рукоятки.
11. Способ обработки хирургического аппарата для хирургической операции, при этом упомянутый способ содержит следующие этапы:
получают упомянутый хирургический аппарат по п.1 или 9;
стерилизуют упомянутый хирургический аппарат и
хранят упомянутый аппарат в стерильной таре.
| US 4349028 А, 14.09.1982 | |||
| СПОСОБ СТЕРИЛИЗАЦИИ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 1993 |
|
RU2096045C1 |
| US 4349028 А, 14.09.1982 | |||
| US 5636780 А, 10.06.1982 | |||
| US 6171330 B1, 09.01.2001 | |||
| RU 93032702 А, 10.11.1996 | |||
| ФЕДОРОВ И.В | |||
| Хирургические инструменты | |||
| Функции и назначение | |||
| - Казань: АКП «АДЕЛАИДА», 2001, с.171-177. | |||

