Настоящее изобретение относится к области креплений, содержащих стержень, на котором закатано кольцо, обеспечивающее удержание крепления. В частности, изобретение относится к устройству для надевания кольца и осуществления его автоматической закатки.
В качественных соединениях, для того чтобы длительно выдерживать значительные усилия, например в соединениях авиационных конструкций, довольно давно известно использование соединений двух деталей, содержащих стержень, на котором закатано кольцо.
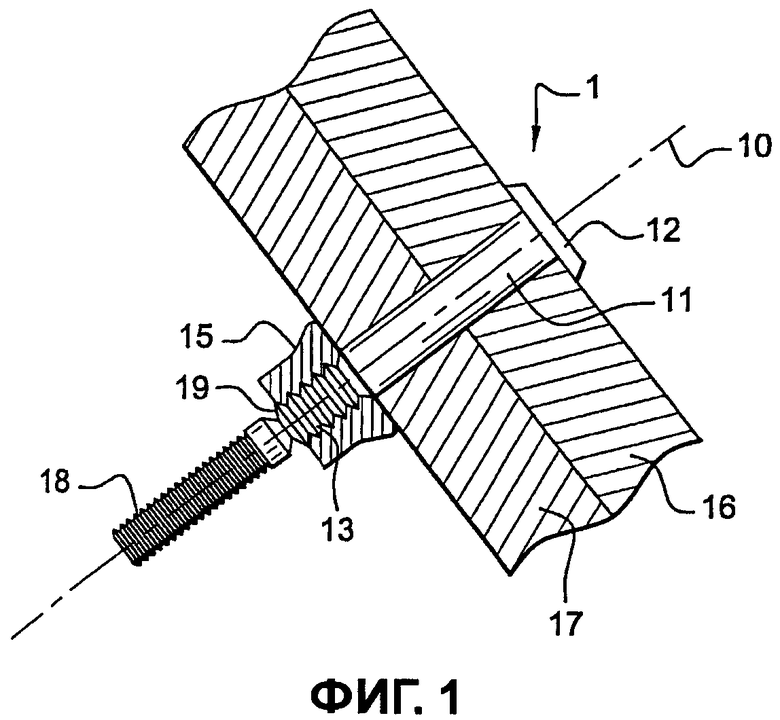
Пример такого крепления изображен на Фиг.1 в качестве иллюстрации для соединения двух листов 16 и 17.
Крепление 1 содержит с одной стороны стержень 11, по существу, цилиндрический по продольной оси 10, оканчивающийся на одной стороне головкой 12. Со стороны стержня 11 противоположной головке 12 на своей длинной части стержень содержит серию канавок 13. Общая длина этого стержня выбирается в зависимости от толщины соединяемых листов таким образом, чтобы, когда стержень установлен на место в отверстии для крепления, проходящем через оба листа, головка 12 этого стержня 11 опиралась на одну из поверхностей листа 16 со стороны этой головки, при этом по своей длине стержень, содержащий канавки 13, выходит за поверхность листа 17 со стороны, противоположной головке 12.
Крепление 1 с другой стороны содержит кольцо 15, которое опирается на свободную поверхность листа 17, и материал которого повторяет форму канавок 13 таким образом, чтобы крепление плотно удерживало оба листа 16 и 17 один против другого вследствие растяжения, прикладываемого к стержню 11 между головкой 12 и кольцом 15.
Такое крепление описано, например, в патенте США 2 531 048.
Для осуществления такого типа крепления обычно прибегают к инструменту, который на первом этапе оказывает усилие на стержень 11, например, посредством растяжения стержня 18 со стороны, противоположной головке 12, осуществляя опору на свободную поверхность листа 17 вблизи крепления 1, который на втором этапе закрепляет кольцо 15, предварительно надетое на стержень 11, путем радиального сжатия на канавках 13 этого кольца, выполненного из пластичного материала, для того, чтобы кольцо повторило форму этих канавок.
На третьем этапе растягивающее усилие на стержень 11 ослабляют и инструмент удаляется. Очень часто этот этап сопровождается отрывом удлинения 18 стержня в области зоны 19 калиброванного разлома, при этом упомянутое удлинение больше не используется, когда соединение закончено.
Как следует из описания этого способа, осуществление крепления требует нескольких последовательных операций.
Когда отверстие, в котором должно быть установлено крепление, выполнено, то необходимо:
• разместить стержень 11 в отверстии с лицевой стороны соединения;
• надеть кольцо 15 на стержень со стороны другой поверхности соединения;
• разместить на месте соединительный инструмент;
• выполнить закатку кольца 15 при осуществлении растяжения за удлинение 18 стержня 11;
• убрать инструмент.
Когда такая последовательность должна быть выполнена множество раз, многие сотни или многие тысячи раз, как, например, при соединении сложных конструкций, таких как конструкции летательных аппаратов, любое уменьшение времени осуществления цикла становится особенно важным для уменьшения времени соединения и соответствующих затрат.
Совершенно очевидно, что уменьшение времени осуществления крепления, то есть позиционирования инструментов и осуществления собственно крепления, не может быть выполнено в ущерб качеству соединений.
Настоящее изобретение предлагает улучшенное устройство для установки закатываемого кольца и автоматической закатки этого кольца с помощью робота - носителя этого конечного инструмента.
Устройство для надевания и закатки кольца на соединительном стержне, предварительно вставленного в отверстие, содержит робот, систему контроля и управления и конечный инструмент. Собственно конечный инструмент содержит устройство для закатки и устройство для установки на место кольца, жестко соединенного с устройством точного позиционирования, посредством которого конечный инструмент закрепляется на конечном элементе робота.
Для того чтобы выполнить закатку с минимумом операций, по меньшей мере, один надеваемый блок колец этого устройства для установки на место колец и закатывающий выступ устройства для закатки выполнены подвижными на конечном инструменте для того, чтобы попеременно позиционироваться по оси крепления. Это попеременное позиционирование надеваемого блока колец или закатывающего выступа выполняется, когда конечный инструмент предварительно устанавливается без управляемого движения робота.
Предпочтительно для осуществления обмена между надеваемым блоком и закатывающим выступом посредством постоянного перемещения относительное положение между осью выхода канала транспортировки колец надеваемого блока и осью закатывающего выступа является, по существу, постоянным, при этом оси, по существу, параллельны оси стержня крепления, когда конечный инструмент находится в положении для размещения и закатки кольца.
Предпочтительно устройство точного позиционирования содержит приводной стол для перемещения по трем осям X, Y и Z, по существу, перпендикулярным между собой, при этом ось Z ориентирована, по существу, параллельно оси закатывающего выступа, и упомянутое устройство точного позиционирования выполнено с возможностью попеременной установки на оси крепления, с одной стороны, надеваемого блока колец устройства для установки колец, и, с другой стороны, закатывающего выступа устройства закрепления путем единственного перемещения по направлениям X и/или Y устройства точного позиционирования без управляющего движения робота.
Для компенсации ошибок позиционирования конечного инструмента, связанного с точностью робота и допусками изготовления, используется система повторного позиционирования устройства для установки кольца. Эта система повторного позиционирования измеряет расхождение между положением отверстия для крепления и осью выхода канала для транспортировки колец и изменяет положение устройства для установки кольца для уменьшения значения расхождения ниже порогового значения.
Предпочтительно измеренное расхождение уменьшается с помощью приводов, вызывающих перемещения по направлениям X и/или Y устройства точного позиционирования.
Расхождение, например расхождение между положением отверстия для крепления и осью выхода канала для транспортировки колец, измеряется, по меньшей мере, с помощью камеры, изображение которой анализируется для определения упомянутого расхождения.
Камера дает предпочтительно изображение отверстия для крепления с репером, неподвижным относительно оси отверстия канала для транспортировки колец, например, путем наблюдения отверстия для крепления с помощью камеры по оси выхода канала для транспортировки колец.
В соответствии с частным случаем осуществления изобретения, который позволяет простым образом исключить конструктивные препятствия для конечного инструмента, в частности, вследствие движений, связанных с изменением положения устройства для установки кольца и закатывающего выступа, устройство для установки кольца содержит два надеваемых блока колец, установленных, по существу, симметрично относительно закрепляющего выступа, при этом используемый надеваемый блок выбирается в зависимости от положения конструктивных препятствий.
Для того чтобы кольцо, надеваемое на стержень крепления, удерживалось на месте перед закаткой независимо от ориентации стержня в процессе того, как надеваемый блок колец отводится для установки на это место закатывающего выступа, устройство содержит, по меньшей мере, стопор, который, в свою очередь, имеет положение, в котором кольцо удерживается на стержне крепления, когда устройство для установки кольца отводится от позиции надевания кольца.
Для управления положениями, в которых конечный инструмент должен быть помещен в особое положение или должен выбрать преимущественно один из надеваемых блоков кольца, система контроля и управления содержит базу данных о положении и ориентации относительно репера креплений и для каждого крепления с информацией, характеризующей направление и расстояние от конструктивного препятствия, наиболее близкого к месту крепления.
Изобретение относится также к способу установки крепления, для осуществления которого особенно предназначено устройство.
В соответствии со способом процесс установки крепления, содержащего кольцо, закатываемое с помощью робота, включает следующие этапы:
- предварительное позиционирование с помощью первых средств закатывающего инструмента, содержащего вторые средства точного позиционирования и содержащего закатывающий выступ, и, по меньшей мере, один надеваемый блок кольца, жестко соединенные со вторыми средствами точного позиционирования относительно отверстия, в котором должно быть размещено крепление;
- позиционирование по оси, предусмотренной для закатывающего выступа, надеваемого блока кольца посредством воздействия на средства точного позиционирования;
- корректировка путем воздействия на вторые средства точного позиционирования положения надеваемого блока для совмещения оси упомянутого блока, по существу, с осью отверстия, в котором должно быть размещено крепление;
- после установки стержня крепления на место в отверстие надевание кольца на стержень крепления с помощью надеваемого блока кольца;
- смещение путем воздействия на вторые средства точного позиционирования комплекса закатывающего выступа и надеваемый блок колец для позиционирования оси закатывающего выступа на место оси надеваемого блока колец;
- закатка кольца на стержне крепления с помощью закатывающего выступа.
Предпочтительно закатываемое кольцо блокируется на стержне крепления, когда надеваемый блок колец смещен для установки закатывающего выступа.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи:
Фиг.1 изображает уже упомянутое известное крепление, используемое в устройстве по изобретению;
Фиг.2 - вид комплекса устройства по изобретению;
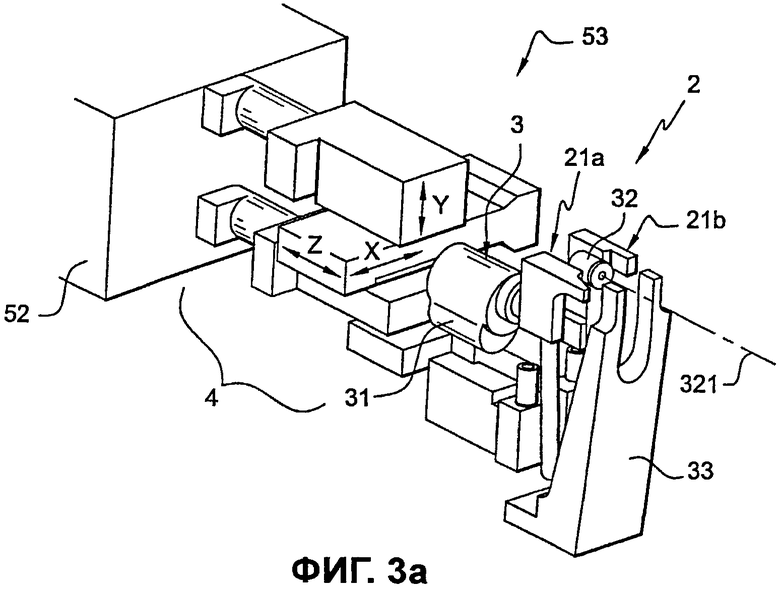
Фиг.3а - конечный инструмент для установки и закатки кольца по изобретению;
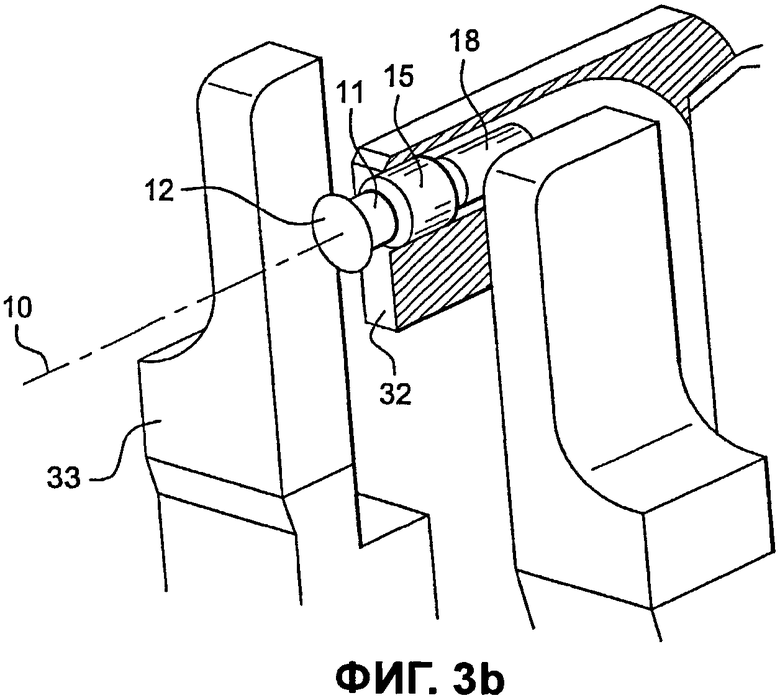
Фиг.3b - деталь конечного инструмента, изображающая фиксацию в положении закатки, соединенные детали не изображены на чертеже;
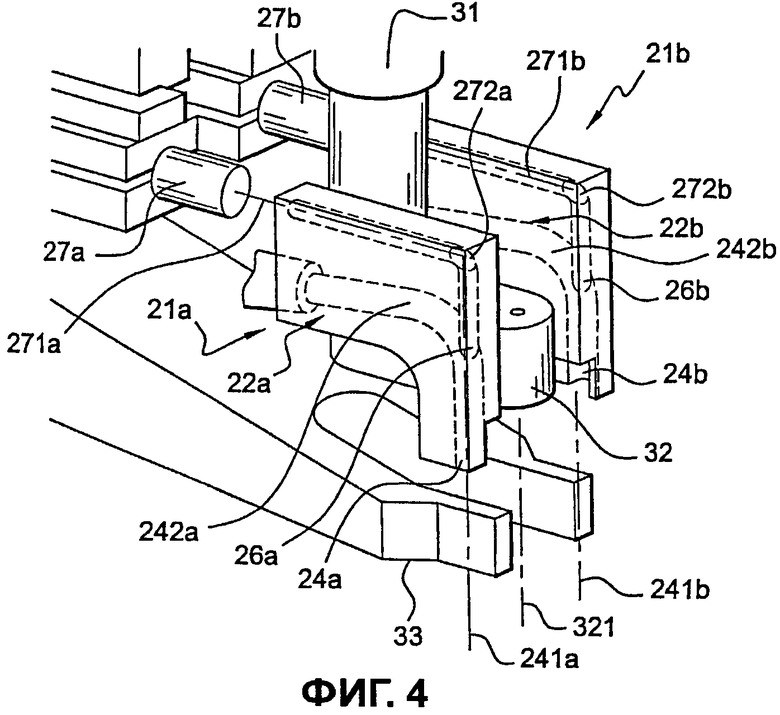
Фиг.4 - деталь конечного инструмента в положении установки на место закатываемого кольца;
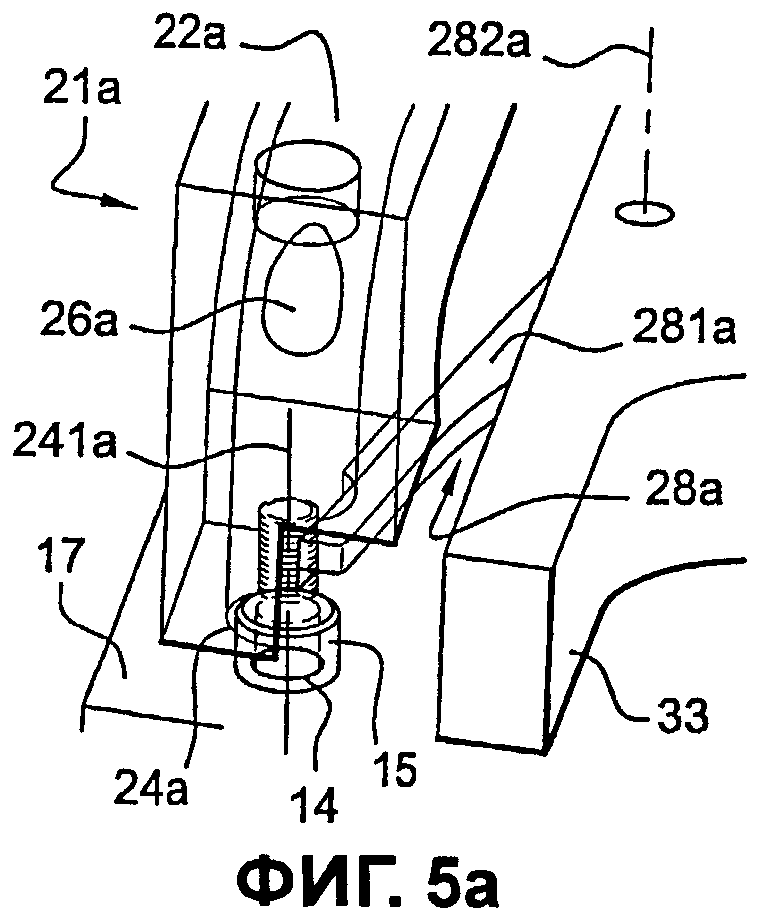
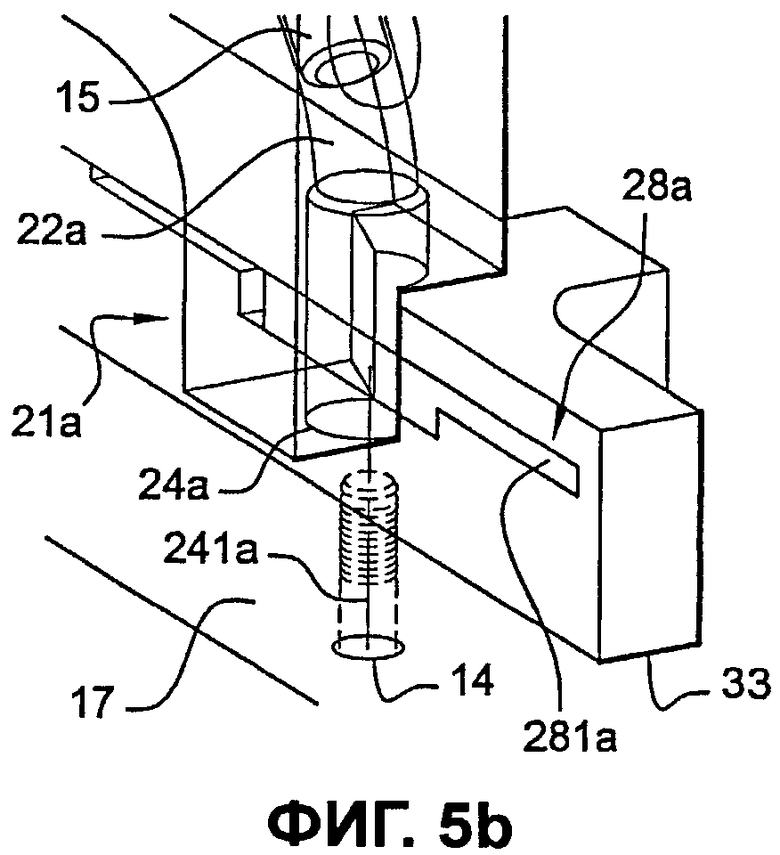
Фиг.5а и 5b - деталь устройства установки на место и удержания колец.
Устройство 5 для установки на место и закатки колец, изображенное на фиг.2, содержит, с одной стороны, робот 51, выполненный с возможностью размещения и ориентации, по меньшей мере, в заданном объеме пространства, конца 52 несущего рычага конечного инструмента 53 для установки и закатки колец.
Устройство содержит также систему 54 управления и контроля, такую как компьютер, который позволяет управлять движениями робота 51 и конечного инструмента 53.
Робот 51 предпочтительно является антропометрическим роботом, который позволяет осуществить множество движений в заданном объеме и, таким образом, может быть использован для различных конфигураций соединяемых элементов. Возможности движений робота 51 выбраны в зависимости от форм и размеров соединяемых элементов. Возможны другие формы роботов-носителей конечного инструмента, такие как, например, устройство подвижного носителя по линейной или криволинейной системе, адаптированное к форме соединяемых элементов.
Конечный инструмент 53, изображенный на фиг.3а, объединяет три основных части:
1 - устройство 4 точного позиционирования;
2 - устройство 2 для установки на место колец 15;
3 - устройство 3 для закатки колец.
Устройство 4 точного позиционирования содержит, в основном, приводной стол для перемещения по трем основным осям, по существу, перпендикулярным между собой. Три оси соответствуют первой оси, называемой осью Z, ориентированной по оси 10 крепления 1, предназначенного для закрепления, когда конечный инструмент 53 находится в положении закатки упомянутого крепления 1, и второй и третьей осям, называемым осью Y и осью Х, по существу, перпендикулярным оси Z и, по существу, перпендикулярным между собой.
Устройство 4 точного позиционирования закреплено на одной из сторон конца 52 рычага робота носителя 51 и удерживается на другой стороне средств позиционирования 2 и закатки 3 колец таким образом, что упомянутые средства позиционирования и закатки колец могут быть точно размещены относительно конца 52 несущего рычага по трем осям X, Y и Z.
Устройство 2 для установки на место закатываемых колец 15 содержит в примере осуществления, изображенном на Фиг.3а, 3b и 4, два подобных блока 21а, 21b для введения колец, каждый из которых предназначен для установки на место колец.
Два блока 21а и 21b установлены, по существу, симметрично с обеих сторон закатывающего выступа 32 по направлению, соответствующему перемещению по оси X приводного стола.
Детальное описание блока 21а, 21b сделано для первого блока 21а, так как второй блок 21b имеет подобную конструкцию для выполнения тех же функций.
Первый блок 21а содержит канал 22а для подачи колец. Внутренний диаметр упомянутого канала, по существу, превышает внешний диаметр колец, которые должны перемещаться в канале таким образом, чтобы иметь возможность скользить в канале, оставаясь коаксиальными каналу.
Канал 22а содержит выходное отверстие 24а по оси 241а, ориентированной, по существу, параллельно оси Z, и колено 242а, в котором размещен источник света 26а в стенке канала 22а, при этом луч света совпадает с осью 241а.
Камера 27а, предназначенная для получения изображения в реальном времени, например видеокамера, по оптической оси 271а, размещена на блоке 21а таким образом, что оптическая ось камеры совмещается с осью 241а в зоне выходного отверстия 24а. Таким образом, камера 27а передает картину зоны, размещенной по оси выходного отверстия 24а, то есть картину зоны, в которой должно быть размещено крепление, когда конечный инструмент 53 расположен на месте для установки кольца 15 на стержень крепления 11.
Когда камера 27 не установлена непосредственно по оси 241а, например, по причине ее размеров, отражающее устройство, такое как зеркало 272а, позволяет сместить в сторону камеру 27а, как изображено на Фиг.4.
В соответствии с подобным размещением второй блок 21b содержит канал 22b, отверстие 24b упомянутого канала, размещенное по оси 241b, колено 242b упомянутого канала, на уровне которого размещен источник света 26b, камера 27b с оптической осью 271b и в необходимом случае отражающее зеркало 272b.
В непредставленном варианте осуществления оптической части устройства 3 для закатки колец используется единственная камера и устройство коммутации, например, двухпозиционное зеркало или обтюратор, для направления оптической оси камеры попеременно к одному или другому из выходных отверстий 24а, 24b.
Предпочтительно устройство содержит также не представленные на чертеже средства освещения зоны, размещенной по оси выходных отверстий 24а, 24b, для получения от камер 27а, 27b изображений хорошего качества, в основном, с повышенной контрастностью.
Канал 22а, кроме того, соединен, например, с помощью трубки 23а, предпочтительно гибкой трубки с учетом возможных движений робота 51 с устройством снабжения кольцами для закатки. Такое устройство, не изображенное на чертеже, выполнено, например, в виде накопителя или предпочтительно в виде питающего устройства, непрерывно работающего с помощью вибрирующего сосуда, при этом кольца для закатки подаются в трубку 23а и канал 22а сжатым воздухом. Второй блок 21b снабжается кольцами подобным образом тем же самым устройством снабжения, что и устройство, используемое первым блоком 21а, либо вторым подобным устройством снабжения.
Устройство 3 для закатки содержит закатывающий выступ 32, привод 31 для растяжения, размещенный на упомянутом закаточном выступе, и опорную платформу 33, предназначенную для воздействия на соединяемые элементы силой, направленной против силы растяжения стержня крепления 11 в процессе операции размещения крепления, имеющего форму вилки, в отверстии которой перемещается закатывающий выступ при операции закатки кольца.
Привод 31 для растяжения и закатывающий выступ 32 подобны таким же, используемым в известных устройствах для закатки колец.
Опорная платформа 33 жестко соединена с конечным элементом 52 робота 51 таким образом, чтобы положение закатывающего выступа и положение устройства 2 для установки колец могли быть изменены с помощью устройства 4 точного позиционирования относительно опорной платформы.
Кроме того, на опорной платформе 33 вблизи отверстий 24а, 24b установлен стопор, когда упомянутое отверстие находится в положении размещения колец 15 для закатки.
Как изображено на Фиг.5а и 5b, со стороны опорной подошвы 33 стопор 28а содержит, например, рычаг 281а, приводимый в движение приводом (не представленным на чертеже), могущим принимать, по меньшей мере, два положения, например, перемещаясь на оси вращения 282а.
В первом положении, изображенном на Фиг.5b, рычаг 281а находится в промежуточном положении, размещенный в платформе 33 для освобождения выходного отверстия 24а для того, чтобы кольцо 15, проходящее по каналу 22а, свободно надевалось на стержень крепления (изображенный на фиг.5 пунктирными линиями), установленный в проточке 14 конструктивного элемента 17, по существу, по оси 241а до выхода вблизи конструкции 14, как изображено на Фиг.5.
Во втором положении, изображенном на Фиг.5а, рычаг 281а находится в блокирующем положении. В этом положении рычаг 281а выходит из платформы 33 в направлении стержня крепления, вставленного в проточку 14 таким образом, что рычаг предотвращает надевание кольца 15 на стержень крепления независимо от ориентации стержня крепления. Таким образом, кольцо 15 удерживается на стержне между конструктивным элементом 17 и рычагом 281а, когда надеваемый блок 21а колец отводится для того, чтобы освободить место для закатывающего выступа.
Как только стержень крепления начинает входить в закатывающий выступ (не изображенное на чертеже положение), кольцо не может больше миновать стержень крепления, каким бы ни было положение крепления, например, в случае закатки, выполненной на потолке, когда кольцо могло бы упасть вследствие гравитации, и рычаг 281а может быть перемещен в первое положение или любое другое положение, позволяющее осуществить операцию закатки закатывающим выступом 32.
Платформа содержит также стопор (не изображенный на чертежах), подобный устройству 28а для удержания колец, когда упомянутые кольца помещаются на место вторым подкомплексом 21b.
Преимущества изобретения прямо вытекают из описания работы устройства 5, которое уточняет роль каждого конструктивного элемента упомянутого устройства.
Предварительный этап использования устройства 5 заключается во введении или образовании в системе 54 управления и контроля базы данных о положении в пространстве различных креплений, которые должны быть установлены, и в определении, в каком порядке крепления 1 должны быть установлены на место. Этот этап известен в системах, использующих роботы, в настоящее время он широко использует концептуальную технику, сопровождаемую цифровыми средствами, способными рассчитать теоретическое положение каждого фиксатора 1 в соответствующем репере, а также ориентацию в пространстве оси 10 крепления.
Для нужд настоящего устройства 5 база данных, содержащая положения в пространстве различных креплений 1 перед установкой, содержит также для каждого крепления характеристическую информацию о направлении и расстоянии до наиболее близкого к креплению конструктивного препятствия.
В качестве примера таким конструктивным препятствием может являться стенка ребра жесткости L-образной формы, ребро жесткости, которое предназначено для крепления панели с помощью линии креплений между подошвой ребра и панелью.
Исходя из базы данных, необходимых для осуществления креплений, робот 51, управляемый средствами управления и контроля 54, предварительно устанавливает по положению и ориентации конец 52 несущего рычага, то есть размещает упомянутый конец несущего рычага в теоретическое положение, в котором закатывающий выступ 32 конечного инструмента 53 помещен по оси 10 в теоретическое положение крепления 1 для установки на место, то есть ось 321 закатывающего выступа, по существу, совмещена с осью 10 крепления. В процессе этой операции предварительного позиционирования опорная платформа 33 входит в контакт с поверхностью соединяемых деталей, расположенной со стороны упомянутых элементов, где будет установлено кольцо 15.
Это предварительное позиционирование выполняется с точностью позиционирования, соответствующей возможностям упомянутого робота и с учетом того, что устройство 4 точного позиционирования находится в промежуточном положении, например, среднем, по трем направлениям X, Y и Z регулирования упомянутого устройства.
По окончании предварительного позиционирования либо в процессе движения для предварительного позиционирования устройство 4 точного позиционирования смещено относительно направлений X и Y в направлении, противоположном направлению наиболее близкого конструктивного препятствия, определенного в базе данных для рассматриваемого крепления, и расстояния, соответствующего расстоянию между осью 321 закатывающего выступа 32 и осью 241а или 241b соответствующих отверстий 24а и 24b блоков 21а, 21b для введения колец. По окончании этой фазы одно из отверстий 24а или 24b в соответствии с положением конструктивного препятствия теоретически находятся на уровне отверстия вилки опорной платформы 33 на оси 10 устанавливаемого крепления, и закатывающий выступ 32, со своей стороны, смещен в направлении, противоположном направлению, в котором находится конструктивное препятствие.
На практике вследствие неточностей позиционирования робота 51 и неточностей позиционирования отверстий креплений, вызванных разбросом при изготовлении, и позиционированием соединяемых деталей отверстие 24а или 24b не находится точно по оси устанавливаемого крепления.
Камера 27а или 27b, отслеживая этот случай, выдает изображение отверстия для крепления, смещенного относительно оси 241а отверстия 24а или оси 241b отверстия 24b, которое анализируется средствами обработки сигнала, например, компьютером 54, который получает в этом случае передаваемые изображения от камер 27а, 27b для выдачи управляющего сигнала приводным двигателем средств 4 точного позиционирования по X и Y путем операции перемещения для смещения центра изображения отверстия для крепления, по существу, для совмещения с осью 241а отверстия 24а или с осью 241b отверстия 24b.
Устройство 4 точного позиционирования и возможности системы генерирования и обработки изображений реализованы в соответствии с требованиями необходимой точности этой операции позиционирования. В случае механического объединения подобных креплений с описанными креплениями обычно достаточна точность в 0,1 мм, которая без особых трудностей достигается известными устройствами.
Предпочтительно на этой стадии установки крепления стержень 11 упомянутого крепления еще не введен в отверстие для получения наиболее четкого изображения отверстия для крепления, желательного условия для точности повторного позиционирования.
После осуществления операции повторного позиционирования стержень крепления 11 подходящим образом вводится в фиксирующее отверстие со стороны соединения, противоположной стороне, где расположен конечный инструмент 53. Эта операция осуществляется любым известным средством, предпочтительно с помощью робота, приводимого в движение устройством 5.
Закатываемое кольцо 15, поступающее по каналу 22а, как изображено на Фиг.5b, или по каналу 22b, перемещаемое, например, потоком сжатого воздуха, надевается, естественно, на стержень крепления 11, который расположен в этот момент по оси отверстия 24a или 24b, из которого поступает закатываемое кольцо.
Стопор, таким образом, находится во втором блокирующем положении, в котором кольцо удерживается на стержне независимо от ориентации этого стержня.
Предпочтительно устройство осуществляет контроль для того, чтобы определить, что кольцо эффективно установлено на стержне крепления. Предпочтительно контроль осуществляется путем обработки изображения, получаемого от камеры, используемой на этапе повторного позиционирования, но могут быть использованы также другие средства, например, контактный или бесконтактный датчик, который обнаруживает наличие кольца.
Когда закатываемое кольцо 15 находится на месте и удерживается на стержне крепления 11 без всякого управляющего движения робота 51, устройство 4 точного позиционирования управляется для перемещения оси 321 закатывающего выступа 32 на ось 10 крепления, при этом в процессе этого перемещения надеваемый блок 21а или 21b колец смещается от оси крепления, то есть на расстояние, соответствующее расстоянию между осью 321 закатывающего выступа 32 и осью 241а или 241b отверстия 24а, соответственно 24b, которое было первоначально вновь установлено, чтобы, по существу, совмещаться с осью 10 крепления.
Наконец, устройство 4 точного позиционирования перемещается в направлении Z для перемещения закатывающего выступа к стержню крепления 11 таким образом, чтобы растяжение 18 стержня 11, используемое для вытягивания упомянутого стержня, осуществлялось в закатывающем выступе и в закатывающем устройстве 3 кольца.
По окончании операции закатывания растяжение 18, обычно отрываемое в процессе операции закатки, удаляется с помощью не представленных средств, и робот 51 отводит конечный инструмент 53 от поверхности соединяемого элемента, затем повторяет цикл следующего крепления в соответствии с заданной последовательностью, предусмотренной в компьютере 54.
В варианте осуществления изобретения конечный инструмент 53 содержит только один надеваемый блок 21а колец 15, при этом конечный инструмент 53 полностью подобен описанному, но не содержит второго блока 21b.
Для внедрения устройства 5, содержащего такой конечный инструмент 53 с одним подкомплексом 21а, робот используется для ориентации конечного инструмента 53 вокруг оси, параллельной оси Z, таким образом, чтобы исключить интерференции с соседними структурами крепления с учетом направления движений устройства 4 точного позиционирования, обязательного при использовании одного надеваемого блока колец.
Таким образом, возможно разместить и быстро закатать с желаемым качеством крепления с использованием закатываемых колец, с минимумом участия персонала в процессе закатывания, при использовании роботов 51 средней точности благодаря устройству 4 точного повторного позиционирования, соединенного с конечным инструментом 53, содержащим устройство 2 для автоматической установки колец и устройство 3 для закатки.
Группа изобретения относится к креплениям, содержащим стержень, на котором закатано кольцо, удерживающее крепление. Устройство (5) для надевания и закатки кольца на стержень для фиксации в отверстии содержит робот (51), систему (54) контроля и управления и конечный инструмент (53) для закатки кольца на стержне. Конечный инструмент (53) содержит устройство для закатки и устройство для размещения кольца, жестко соединенные с устройством точного позиционирования, посредством которого упомянутый конечный инструмент (53) закреплен на конечном элементе (52) робота (51). Надеваемый блок колец устройства для размещения кольца и закатывающий выступ устройства для закатки выполнены подвижными на конечном инструменте (53) для попеременного позиционирования на оси крепления без управляющего перемещения робота, когда конечный инструмент (53) предварительно позиционирован. 2 н. и 16 з.п. ф-лы, 7 ил.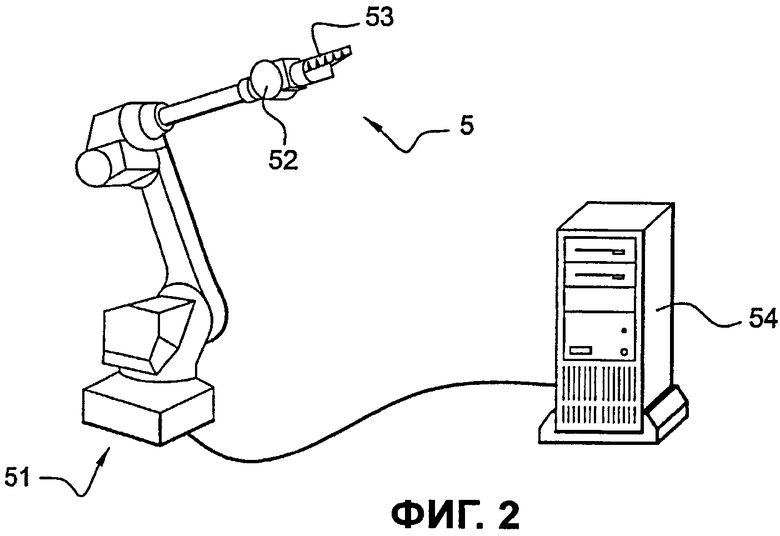
1. Устройство для надевания и закатки кольца (15) на стержне (11) крепления (1) с продольной осью Z, размещенном в отверстии (14), содержащее робот (51), систему (54) контроля и управления и закатывающий инструмент (53) для закатки кольца (15) на стержне (11), отличающееся тем, что закатывающий инструмент (53) содержит устройство (3) для закатки и устройство (2) для размещения кольца (15), жестко соединенные с устройством (4) точного позиционирования, выполненным с возможностью точного перемещения упомянутых устройств закатки и размещения кольца относительно конечного элемента (52) робота (51) в направлении продольной оси Z, в направлении оси X, по существу, перпендикулярной оси Z, и в направлении оси Y, по существу, перпендикулярной осям Z и X, с помощью которого закатывающий инструмент (53) соединен с конечным элементом (52) робота (51).
2. Устройство по п.1, отличающееся тем, что, по меньшей мере, один вставляемый блок (21а, 21b) колец устройства (2) для размещения кольца (15) и закатывающий выступ (32) устройства (3) для закатки установлены подвижно на закатывающем инструменте (53) для попеременного позиционирования на оси (10) устанавливаемого крепления (1) без управляемого перемещения робота (51), когда закатывающий инструмент (53) предварительно позиционирован.
3. Устройство по п.1 или 2, отличающееся тем, что оно содержит опорную платформу (33), жестко соединенную с конечным элементом (52).
4. Устройство по п.2, отличающееся тем, что относительное положение между осью (241а, 241b) выхода (24а, 24b) канала (22а, 22b) для транспортировки колец, по меньшей мере, одного блока (21а, 21b) и осью (321) закатывающего выступа (32) является, по существу, постоянным, при этом упомянутые оси, по существу, параллельны оси (10) стержня (11) крепления (1), когда конечный инструмент (53) находится в положении размещения и закатки кольца.
5. Устройство по п.4, отличающееся тем, что устройство (4) точного позиционирования содержит приводной стол для перемещения по трем осям X, Y и Z, по существу, перпендикулярным между собой, при этом ось Z ориентирована, по существу, параллельно оси (321) закатывающего выступа (32).
6. Устройство по п.5, отличающееся тем, что устройство (4) точного позиционирования выполнено с возможностью попеременного позиционирования по оси (10) устанавливаемого крепления (1), с одной стороны, по меньшей мере, одного надеваемого блока (21а, 21b) колец устройства (2) для размещения кольца (15), и, с другой стороны, закатывающего выступа (32) устройства (3) для закатки путем единственного перемещения по направлениям X и/или Y устройства (4) точного позиционирования без управляемого перемещения робота (51).
7. Устройство по п.6, отличающееся тем, что оно содержит систему повторного позиционирования устройства (2) для размещения колец (15) для снижения величины порога измеренного расхождения между положением отверстия (14) и осью (241а, 241b) выхода (24а, 24b) канала (22а, 22b) для транспортировки колец.
8. Устройство по п.7, отличающееся тем, что система повторного позиционирования устройства (2) для размещения колец (15) уменьшает измеренное расхождение по командам, получаемым приводами, воздействующими на перемещения по направлениям X или Y устройства (4) точного позиционирования.
9. Устройство по п.8, отличающееся тем, что оно содержит, по меньшей мере, одну камеру (27а, 27b), используемую для измерения расхождения между положением отверстия (14) и осью (241а, 241b) выхода (24а, 24b) канала (22а, 22b) для транспортировки колец.
10. Устройство по п.9, отличающееся тем, что, по меньшей мере, одна камера (27а, 27b) размещена таким образом, что изображение отверстия (14) для установки крепления передается, по меньшей мере, одной камерой по оси (241а, 24lb) выхода (24а, 24b) канала (22а, 22b) для транспортировки колец.
11. Устройство по п.7, отличающееся тем, что оно содержит, по меньшей мере, одну камеру (27а, 27b), используемую для измерения расхождения между положением отверстия (14) и осью (241а, 241b) выхода (24а, 24b) канала (22а, 22b) для транспортировки колец.
12. Устройство по одному из пп.2-11, отличающееся тем, что устройство (2) для размещения кольца (15) содержит два надеваемых блока (21а, 2lb) колец, установленных, по существу, симметрично относительно закатывающего выступа (32).
13. Устройство по 12, отличающееся тем, что оно содержит, по меньшей мере, один стопор (28а, 28b), имеющий, по меньшей мере, одно положение, в котором кольцо (15) удерживается на стержне крепления (11), когда устройство (2) для размещения кольца отводится от положения надевания кольца.
14. Устройство по одному из пп.1-11, отличающееся тем, что система (54) контроля и управления содержит базу данных, дающую информацию о положении и направлении исходного репера устанавливаемых креплений для каждого крепления и информацию о направлении и расстоянии до конструктивного препятствия, наиболее близкого к креплению.
15. Устройство по одному из пп.1-11, отличающееся тем, что оно содержит, по меньшей мере, один стопор (28а, 28b), имеющий, по меньшей мере, одно положение, в котором кольцо (15) удерживается на стержне крепления (11), когда устройство (2) для размещения кольца отводится от положения надевания кольца.
16. Устройство по п.15, отличающееся тем, что система (54) контроля и управления содержит базу данных, дающую информацию о положении и направлении исходного репера устанавливаемых креплений для каждого крепления и информацию о направлении и расстоянии до конструктивного препятствия, наиболее близкого к креплению.
17. Способ установки крепления (1), содержащего стержень (11) и кольцо (15), закатываемое с помощью робота (51), содержащий этапы, на которых предварительно позиционируют относительно отверстия (14), в котором должно быть размещено крепление (1), с помощью первых средств позиционирования закатывающего инструмента (53), содержащего вторые средства (4) точного позиционирования и содержащего закатывающий выступ (32) и, по меньшей мере, один надеваемый блок (21а, 21b) колец, жестко соединенный со вторыми средствами точного позиционирования, позиционируют по оси, предусмотренной для закатывающего выступа (32), надеваемого блока (21а, 21b) колец путем воздействия на средства (4) точного позиционирования, корректируют положение надеваемого блока (21а, 21b) колец путем воздействия на вторые средства (4) точного позиционирования для совмещения, по существу, оси (241а, 241b) упомянутого блока с осью отверстия (14), в котором должно быть размещено крепление (1), надевают после установки на место стержня крепления (1) в отверстие (14) кольцо (15) на стержень крепления (1) с помощью надеваемого блока (21а, 21b) колец, перемещают путем воздействия на вторые средства (4) точного позиционирования комплекса закатывающего выступа (32) и надеваемого блока (21а, 21b) колец для позиционирования оси (321) закатывающего выступа на место оси (241а, 241b) надеваемого блока колец и закатывают кольцо (15) на стержне крепления (1) с помощью закатывающего выступа (32).
18. Способ по п.17, отличающееся тем, что закатываемое кольцо (15) блокируют на стержне крепления (1), когда надеваемый блок (21а, 2lb) колец отводится, освобождая место для размещения закатывающего выступа (32).
| US 4854491 А, 08.08.1989 | |||
| US 6253448 B1, 03.07.2001 | |||
| 0 |
|
SU159269A1 | |
| ЕР 1561526 А, 10.08.2005. | |||

