Изобретение относится к учебно-наглядным пособиям и касается конструкции прибора для изучения законов механики и, конкретно, для изучения движения тел в условиях типового кабинета физики общеобразовательных учебных учреждений.
Известно устройство для изучения законов механики, содержащее беговую дорожку с линейной шкалой, брусок с магнитной вставкой, секундомер со спаренными магнитоуправляемыми датчиками, грузы с подвесными крючками, динамометр, шарик, разборный штатив, цилиндрическую пружину с крючками на концах. Для измерения скорости неравномерного движения используют секундомер со спаренными магнитоуправляемыми датчиками. При прохождении бруска мимо датчиков магнитная вставка в бруске замыкает их, а секундомер фиксирует время перемещения бруска (патент RU 2204865). В известном устройстве не предусмотрены средства, которые обеспечили бы четкое позиционирование положения датчиков относительно беговой дорожки, по которой перемещается брусок, и следовательно, относительно и самого бруска, что может привести к некачественному проведению опытов, экспериментов и получению неточных результатов.
Ближайшим аналогом к заявляемому объекту является устройство для проведения лабораторных работ, содержащее магнитное основание, беговую дорожку в виде желоба со стенками, линейной шкалой и продольной магнитной полосой, каретку, секундомер, датчики, а также разборный штатив. Внешняя сторона основания желоба основной беговой дорожки снабжена дополнительной беговой дорожкой, выполненной в виде двух параллельных вертикальных направляющих, двумя вертикальными ребрами, расположенными по разные стороны от дополнительной беговой дорожки, вертикальные направляющие выполнены меньшей высотой, чем высота вертикальных ребер. Каретка снабжена двумя зацепами и плоским боковым выступом с магнитной вставкой на его верхней стороне. Секундомер снабжен разъемом для присоединения спаренных датчиков, выполненных в виде нормально разомкнутого магнитоуправляемого контакт-геркона, устанавливаемого на магнитной полосе беговой дорожки. В патенте показана также конструкция датчика, состоящего из корпуса с магнитом, служащим для взаимодействия с магнитной полосой, закрепляемой на беговой дорожке, и расположенного внутри корпуса геркона (патент RU 2376647). Отсутствие в конструкции датчиков элементов, обеспечивающих их точное стабильное положение относительно беговой дорожки, будет приводить к смещению датчиков в процессе проведения опыта, что отрицательно скажется на его результатах. Конструктивное выполнение той части корпуса датчика, в которой расположен геркон, обеспечивает качественный прием сигнала только с одной из сторон корпуса, вследствие чего ограничиваются возможности использования датчика при проведении опытов.
Общим недостатком для обоих аналогов является отсутствие в их комплекте современного средства отбора данных, обработки данных и отображения параметров движения твердого тела, что усложняет и затрудняет процесс обработки полученных при проведении опытов данных.
Заявляемое изобретение направлено на решение задачи по созданию современного учебного прибора для изучения законов механики, который позволил бы проводить опыты по изучению законов движения твердого тела.
Технический результат, который может быть достигнут при осуществлении изобретения, заключается в повышении удобства в пользовании прибором и в повышении качества проведения опытов с получением максимально точных результатов, в упрощении обработки этих результатов, а также в расширении демонстрационных возможностей.
Для достижения указанного технического результата предлагается прибор для изучения законов механики, который содержит установочную платформу в виде длинномерной пластины с продольной магнитной полосой на наружной поверхности ее боковой стенки, по меньшей мере, два магнитоуправляемых герконовых датчика, выполненных с возможностью установки на боковой стенке платформы, каждый из которых включает корпус с магнитом, служащим для взаимодействия с упомянутой продольной магнитной полосой, и расположенный внутри корпуса геркон, твердое тело с позиционированным магнитом, устанавливаемое с возможностью перемещения вдоль герконовых датчиков, установленных на боковой стенке платформы, и средство отбора данных, обработки данных и отображения параметров движения твердого тела, в качестве которого использован компьютер. Корпус герконового датчика состоит из опорной части, на которой закреплен упомянутый магнит и которая выполнена с возможностью обеспечения стабильного позиционирования датчика относительно платформы при установке его на продольной магнитной полосе, и из несущей части в виде капсулы, вытянутой в осевом направлении, замкнутая внутренняя осевая полость которой служит для размещения геркона. Упомянутая несущая часть в поперечном сечении имеет конфигурацию, при которой обеспечена возможность стабильного срабатывания геркона при расположении инициирующего магнита с любой точки периметра несущей части. Герконовые датчики выведены на единый разъем, выполненный с возможностью подключения к компьютеру.
Длинномерная пластина, образующая установочную платформу, преимущественно выполнена в виде желоба.
В качестве твердого тела могут быть использованы брусок или каретка, выполненные с возможностью установки на платформе и перемещения по платформе вдоль нее.
Прибор дополнительно содержит штатив, при этом твердое тело выполнено с возможностью подсоединения к штативу посредством пружинной подвески, при этом платформа имеет на одном из своих торцов опорное основание для обеспечения установки ее в вертикальное положение. Кроме того, твердое тело может быть выполнено с возможностью подвешивания на штативе посредством нерастяжимой нити или стержня.
Возможность стабильного позиционирования датчика относительно платформы обеспечена за счет выполнения на опорной части корпуса датчика ограничительных элементов, расположенных по разные стороны от установленного в опорной части магнита и охватывающих магнитную полосу соответственно с обоих ее продольных торцов при установке датчика на платформе. Несущая часть корпуса датчика имеет форму цилиндра с кольцеобразным круглым поперечным сечением.
Благодаря использованию в заявляемом приборе установочной платформы с фиксируемыми на ней герконовыми датчиками, которые выведены на общий разъем, подсоединяемый к компьютеру, обеспечена возможность значительно расширить диапазон проводимых опытов, исключив при этом необходимость проведения пользователем целого ряда измерений и вычислений, которые в предлагаемом приборе осуществляются при помощи заложенной в компьютер программы. Качественному проведению опытов с получением максимально точных результатов способствует конструктивное выполнение используемых в приборе герконовых датчиков, которые стабильно позиционированы на платформе, что исключает возможность их перекосов и смещений. Особенности выполнения несущей части корпуса датчика обеспечивают нахождение геркона в одинаковых условиях приема сигнала по всему боковому периметру датчика; это позволяет эффективно использовать предлагаемый прибор для широкого спектра опытов, в которых датчики находятся в различных ракурсах по отношению к движущемуся телу.
Изобретение поясняется чертежами, где:
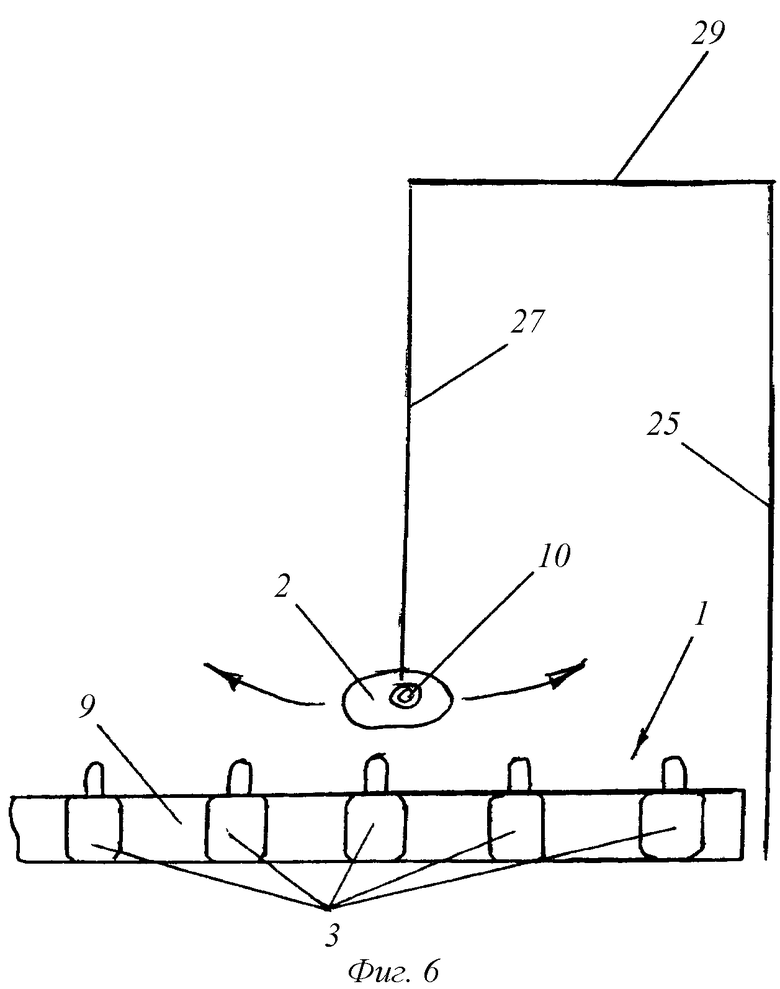
На фиг.1 изображен заявляемый прибор;
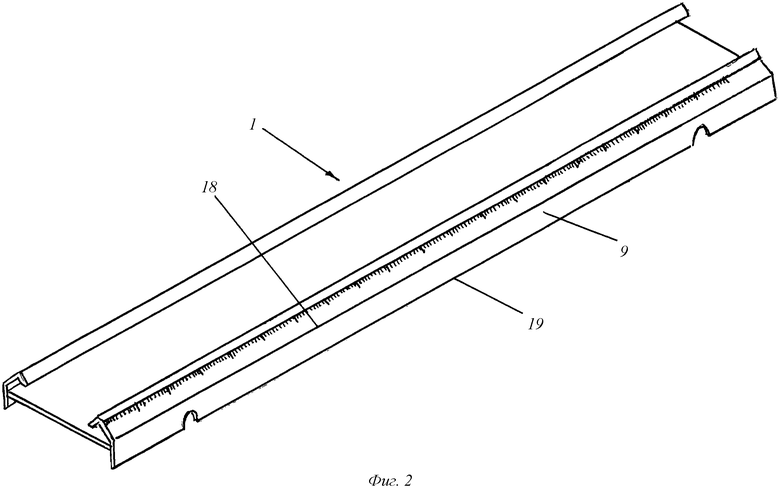
На фиг.2 - показана установочная платформа в аксонометрии;
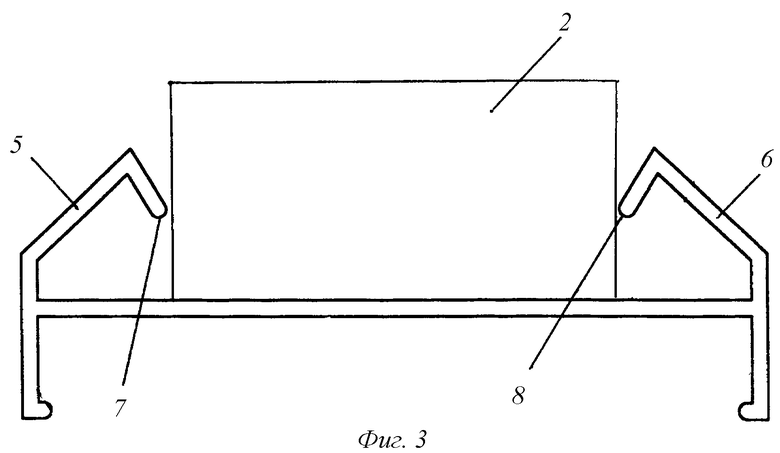
На фиг.3 - поперечное сечение установочной платформы;
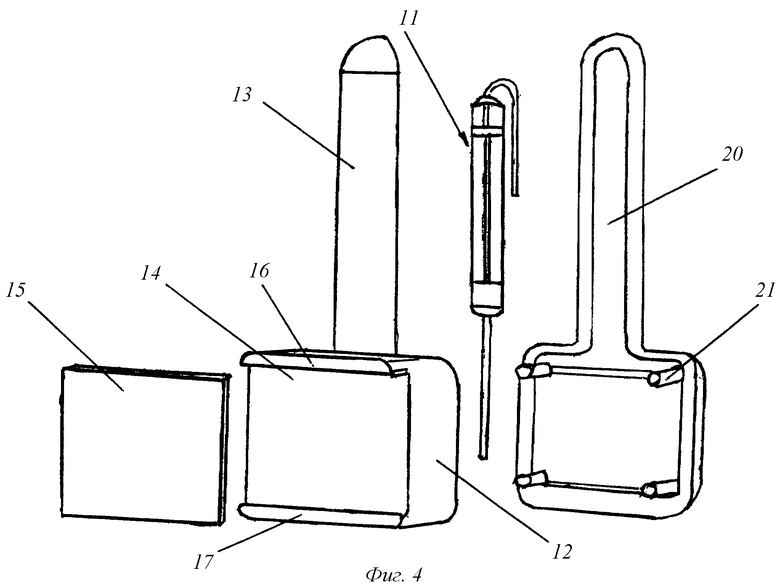
На фиг.4 - герконовый датчик в разобранном состоянии;
На фиг.5 и 6 - схематично показаны дополнительные варианты использования заявляемого прибора.
Предлагаемый прибор для изучения законов механики включает установочную платформу 1 в виде длинномерной профилированной металлической пластины, твердое тело, в качестве которого показан брусок 2, по меньшей мере два магнитоуправляемых герконовых датчика 3 и компьютер 4 (компьютер, мини-компьютер, ноутбук, нетбук). В состав прибора входит также разборный штатив 25.
Установочная платформа 1 преимущественно имеет форму желоба с плоским основанием, образующим беговую дорожку при проведении опытов с использованием движущегося по платформе твердого тела, и боковыми стенками 5 и 6, загнутыми внутрь желоба (фиг.2, 3). При загибе стенок 5, 6 свободные торцы стенок образуют ограничительные ребра 7 и 8. На боковой стенке 5 платформы 1 имеется линейная шкала и закреплена продольная магнитная полоса 9.
Брусок 2 имеет форму прямоугольного параллелепипеда и установлен на платформе 1 с опорой своим плоским основанием на плоское основание платформы и с возможностью перемещения по платформе вдоль нее. На бруске 2 закреплен позиционированный магнит 10.
Каждый из герконовых датчиков 3 включает корпус и расположенный внутри корпуса геркон 11. Геркон - это герметически запаянный в стеклянную трубку контакт. Он замыкается или размыкается при поднесении к нему магнита. Достоинство герконового датчика - большая износоустойчивость и, следовательно, очень большой срок службы, очень малое время срабатывания, возможность обнаружения и измерения бесконтактным способом, а также нечувствительность к загрязнению.
Корпус герконового датчика состоит из опорной части 12 и из несущей части 13. С наружной стороны опорной части 12 имеется прямоугольное углубление (ниша) 14, в которое помещен магнит 15. Крепления датчика 3 на платформе 1 осуществляется за счет взаимодействия магнита 15 с продольной магнитной полосой 9.
Для обеспечения стабильного положения датчиков 3 относительно платформы 1 (т.е. для предотвращения их смещений и перекосов) использованы ограничительные элементы. Эти элементы представляют собой полки 16 и 17, расположенные по разные стороны от установленного в опорной части магнита 15 по противолежащим верхней и нижней линиям прямоугольного углубления 14 и выступающие наружу относительно опорной части 12 корпуса датчика. Размеры элементов датчиков 3 и магнитной полосы 9 подобраны таким образом, что при креплении магнита на механической скамье полки 16 и 17 плотно охватывают магнитную полосу 9 со стороны ее противолежащих верхнего 18 и нижнего 19 продольных торцов, обеспечивая тем самым стабильное фиксированное положение датчиков на платформе.
Несущая часть 13 корпуса датчика выполнена в виде капсулы, вытянутой в осевом направлении. Внутри капсулы образована замкнутая внутренняя осевая полость 20, в которую помещается геркон 11. Несущая часть 13 корпуса датчика 3 должна иметь в поперечном сечении такую конфигурацию, при которой была бы обеспечена возможность стабильного срабатывания геркона 11 при расположении инициирующего магнита с любой точки периметра несущей части. Наиболее предпочтительный вариант выполнения несущей части 13 корпуса датчика показан на фиг.4, из которой видно, что часть 13 имеет форму цилиндра и кольцеобразную круглую форму в поперечном сечении. В результате такого выполнения геркон 11 находится в одинаковых условиях для приема сигнала по всему боковому периметру цилиндра.
Корпус датчика 3 выполнен разъемным (из двух частей) по плоскости, проходящей через ось цилиндра несущей части 13 и параллельно прямоугольному углублению 14, а относительно плоскости, перпендикулярной плоскости разъема, корпус датчика выполнен симметричным. Части разъемного корпуса скрепляются друг с другом посредством выступов 21 и гнезд под выступы.
Датчики 3 через провода 23 подсоединены к единому разъему 24. На каждом из проводов 23 может быть последовательно присоединено два и более датчиков.
Единый разъем 24 выполнен с возможностью подключения к компьютеру 4, который используется в качестве средства отбора данных, обработки данных и отображения параметров движения твердого тела.
Прибор дополнительно оснащен пружинной подвеской 26 и нерастяжимой нитью 27.
Ниже приведены отдельные примеры использования прибора.
Пример 1. Измерение скорости движения тела по наклонной плоскости
Платформу 1 фиксируют одним концом, поднятым над опорной поверхностью, в зажимных лапках штатива 25, обеспечивая при этом ее наклонное положение. Другой конец платформы 1 при этом опирается на опорную поверхность. Устанавливают брусок 2 на беговую дорожку платформы 1. Датчики 3 закрепляют на продольной магнитной полосе 9 платформы 1, при этом положение датчиков 3 благодаря особенности их выполнения и фиксации на платформе 1 в процессе проведения опыта остается стабильным. Брусок 2 перемещается по беговой дорожке платформы 1. Расположенный на бруске 2 позиционированный магнит 10, проходя мимо датчиков 3, замыкает их, благодаря чему фиксируются параметры движения бруска 2 и передаются на компьютер 4. В компьютере производится обработка поступивших параметров и производятся необходимые вычисления, на основании которых определяется скорость движения тела. Для определения мгновенной скорости движения тела на определенных участках платформы 1 датчики 3 устанавливаются попарно с расположением их в паре в непосредственной близости друг к другу.
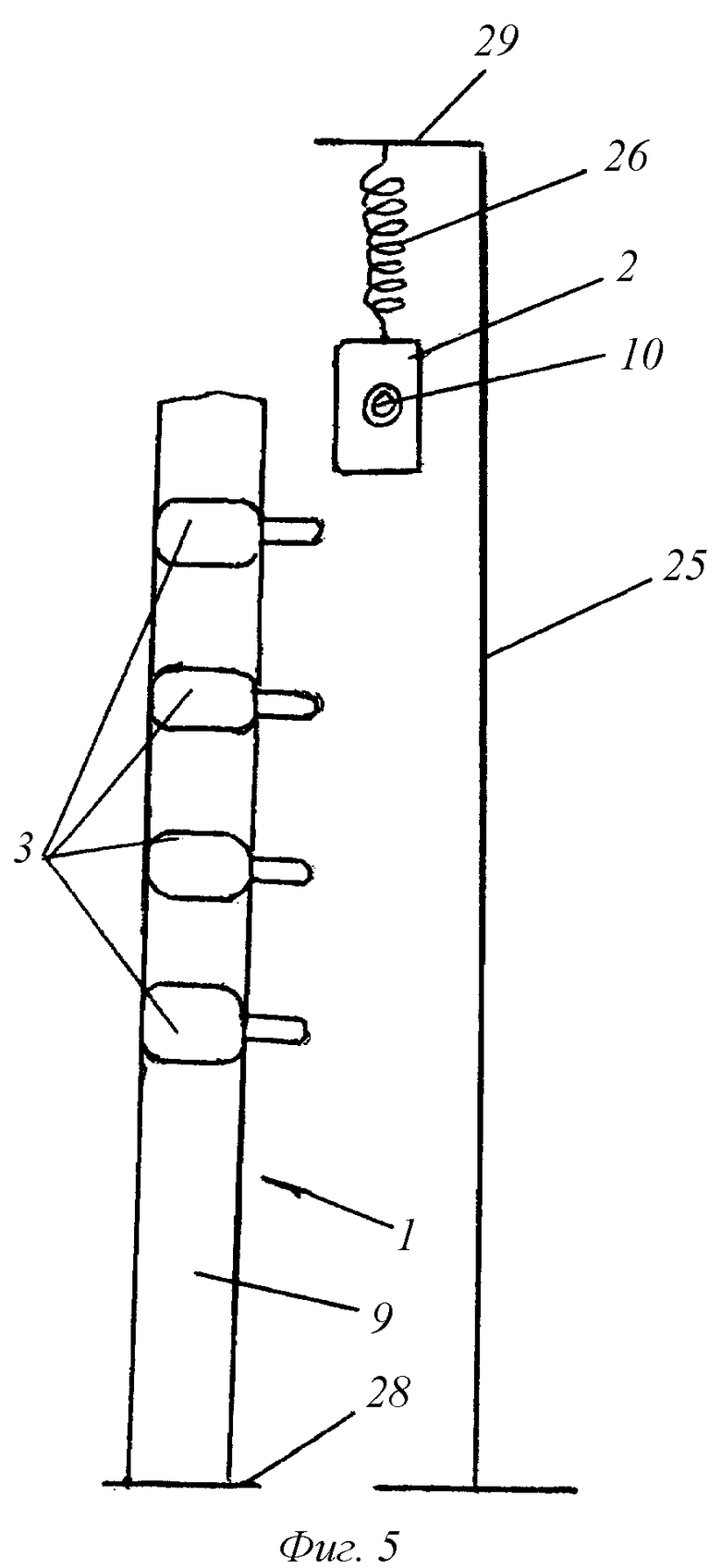
Пример 2. Изучение колебания тела, подвешенного на пружине (фиг.5)
Платформу 1 фиксируют в вертикальном положении, устанавливая ее на опорное основание 28, предусмотренное на одном из торцов платформы. На магнитной полосе 9 платформы 1 закрепляют герконовые датчики 3. При исследовании затухающих sin-подобных колебаний тела, подвешенного на пружинной подвеске 26, датчики 3 устанавливают по всей длине магнитной полосы 9 на фиксированных расстояниях друг от друга. Рядом с платформой 1 помещают штатив 25, на горизонтальном кронштейне 29 которого закрепляют пружинную подвеску 26. На другой конец пружинной подвески 26 навешивают брусок 2. Фиксируют начальное положение бруска 2 относительно платформы 1. Оттягивают брусок 2 вниз и отпускают. Брусок 2 начинает совершать колебательные движения на пружинной подвеске 26 в вертикальной плоскости вдоль платформы 1. При этом датчики 3 фиксируют прохождение через них бруска 2 при перемещении его вверх-вниз с затухающей по времени амплитудой. С датчиков 3 полученная информация поступает в компьютер 4, где происходит обработка параметров. Результатом обработки является построение кривой затухающих колебаний бруска 2, изображение которой можно видеть на экране монитора.
Пример 3. Изучение маятниковых колебаний тела (фиг.6)
Платформу 1 фиксируют в горизонтальном положении. На магнитной полосе 9 платформы закрепляют герконовые датчики 3. При исследовании затухающих колебаний бруска датчики 3 устанавливают по всей длине магнитной полосы 9 на фиксированных расстояниях друг от друга. Рядом с платформой 1 помещают штатив 25, на горизонтальном кронштейне 29 которого закрепляют нерастяжимую нить 27. На другой конец нерастяжимой нити навешивают брусок 2. Установку кронштейна 29 и крепление нити 27 с бруском 2 осуществляют таким образом, чтобы при колебаниях системы «нить-брусок» по типу маятника брусок 2 перемещался в одной вертикальной плоскости возвратно-вращательно по дуге вдоль герконовых датчиков 3. Фиксируют начальное положение бруска 2 относительно платформы 1. Отклоняют брусок 2 на нити 27 в крайнее положение и отпускают. Брусок 2 начинает совершать колебательные движения по дуге в вертикальной плоскости вдоль датчиков 3. При этом датчики 3 фиксируют прохождение через них бруска 2 при перемещении его с затухающей по времени амплитудой. С датчиков 3 полученная информация поступает в компьютер 4, где происходит обработка параметров. Результатом обработки является построение кривой затухающих колебаний бруска 2, изображение которой можно видеть на экране монитора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКТ ДЛЯ ДЕМОНСТРАЦИИ ЗАКОНОВ МЕХАНИКИ (ВАРИАНТЫ), МАГНИТНЫЙ ГЕРКОНОВЫЙ ДАТЧИК И ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ СКОРОСТИ ТЕЛА, БРОШЕННОГО ГОРИЗОНТАЛЬНО | 2011 |
|
RU2460146C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЛАБОРАТОРНЫХ РАБОТ | 2008 |
|
RU2376647C2 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2021 |
|
RU2754756C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ | 2021 |
|
RU2756082C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ | 2021 |
|
RU2755082C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 2021 |
|
RU2755547C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОГО ДАВЛЕНИЯ | 2021 |
|
RU2756664C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2021 |
|
RU2766531C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2020 |
|
RU2747101C1 |
| ИЗМЕРИТЕЛЬНЫЙ МОДУЛЬ | 2021 |
|
RU2762516C1 |
Изобретение относится к конструкции прибора для изучения законов механики. Прибор содержит установочную платформу в виде длинномерной пластины с продольной магнитной полосой на наружной поверхности ее боковой стенки. На платформу устанавливается и перемещается по ней твердое тело с позиционированным магнитом. На боковой стенке платформы устанавливаются магнитоуправляемые герконовые датчики. Корпус герконового датчика состоит из опорной части и несущей части. Опорная часть выполнена конструктивно таким образом, что обеспечена возможность стабильного позиционирования датчика относительно механической скамьи при установке его на продольной магнитной полосе. Несущая часть корпуса датчика выполнена в виде капсулы, в замкнутой внутренней осевой полости которой размещен геркон. Несущая часть в поперечном сечении имеет такую конфигурацию, при которой обеспечена возможность стабильного срабатывания геркона при расположении инициирующего магнита с любой точки периметра несущей части. Герконовые датчики подсоединены к единому разъему, который подключается к компьютеру. Техническим результатом изобретения является повышение удобства в пользовании комплектом и повышение качества проведения опытов и экспериментов с получением максимально точных результатов. 7 з.п. ф-лы, 6 ил.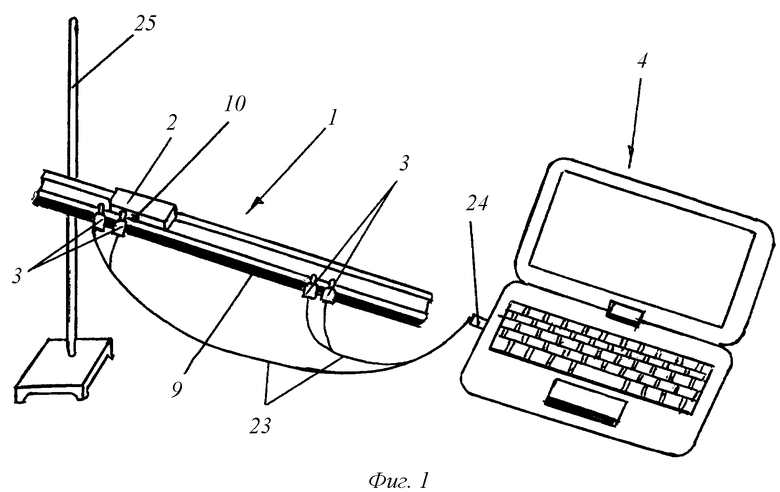
1. Прибор для изучения законов механики, характеризующийся тем, что он содержит установочную платформу в виде пластины с продольной магнитной полосой на наружной поверхности ее боковой стенки, по меньшей мере, два магнитоуправляемых герконовых датчика, каждый из которых включает корпус с магнитом, служащим для взаимодействия с упомянутой продольной магнитной полосой, и расположенный внутри корпуса геркон, твердое тело, с позиционированным магнитом, устанавливаемое с возможностью перемещения вдоль герконовых датчиков, и средство отбора данных, обработки данных и отображения параметров движения твердого тела, в качестве которого использован компьютер, причем корпус герконового датчика состоит из опорной части, на которой закреплен упомянутый магнит и которая выполнена с возможностью обеспечения стабильного позиционирования датчика относительно платформы при установке его на продольной магнитной полосе, и из несущей части в виде капсулы, вытянутой в осевом направлении, замкнутая внутренняя осевая полость которой служит для размещения геркона, при этом упомянутая несущая часть в поперечном сечении имеет конфигурацию, при которой обеспечена возможность стабильного срабатывания геркона при расположении инициирующего магнита с любой точки периметра несущей части, при этом герконовые датчики выведены на единый разъем, выполненный с возможностью подключения к компьютеру.
2. Прибор по п.1, в котором длинномерная пластина, образующая установочную платформу, выполнена в виде желоба.
3. Прибор по п.1, в котором в качестве твердого тела использованы брусок или каретка, выполненные с возможностью установки на платформе и перемещения по платформе вдоль нее.
4. Прибор по п.1, который содержит штатив.
5. Прибор по п.4, в котором твердое тело выполнено с возможностью подсоединения к штативу посредством пружинной подвески, при этом платформа имеет на одном из своих торцов опорное основание для обеспечения установки ее в вертикальное положение.
6. Прибор по п.4, в котором твердое тело выполнено с возможностью подвешивания на штативе посредством нерастяжимой нити.
7. Прибор по п.1, в котором возможность стабильного позиционирования датчика относительно платформы обеспечена за счет выполнения на опорной части корпуса датчика ограничительных элементов, расположенных по разные стороны от установленного в опорной части магнита и охватывающих магнитную полосу соответственно с обоих ее продольных торцов при установке датчика на платформе.
8. Прибор по п.1, в котором несущая часть корпуса датчика имеет форму цилиндра с кольцеобразным круглым поперечным сечением.
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЛАБОРАТОРНЫХ РАБОТ | 2008 |
|
RU2376647C2 |
| УЧЕБНОЕ ПОСОБИЕ ДЛЯ ИЗУЧЕНИЯ ЗАКОНОВ ФИЗИКИ | 2006 |
|
RU2314571C2 |
| Лабораторные работы по физике | |||
| / Под ред | |||
| В.И.Ивероновой | |||
| Наука, главная редакция физико-математической литературы | |||
| - М., 1965, с.82-86 | |||
| Прибор для демонстрации ударных явлений | 1989 |
|
SU1712955A1 |
| US 6582234 В1, 24.06.2003 | |||
| CN 101840649 А, 22.09.2010. | |||

