Изобретение относится к области медицинского приборостроения и может быть использовано при биомеханических исследованиях, в спорте, в нейрофизиологических исследованиях, для проведения ранней диагностики заболеваний различных функциональных систем человека, а также при оценке профессиональной пригодности.
Известен дифференциальный датчик (свидетельство на полезную модель №24920 от 14.03.2002) для регистрации высокоамплитудных треморограмм, содержащий токовихревые датчики движений, блоки для регистрации и представления данных о треморограмме, отличающийся тем, что, с целью расширения регистрируемого амплитудного диапазона тремора и повышения производительности устройства, датчик выполнен в виде двух осесимметричных токовихревых датчиков в виде спирали Архимеда с параллельными плоскостями, выходы которых подключаются к сумматору сигналов, с ответной металлической пластинкой, надеваемой на палец испытуемого, который помещается в зазор между двумя токовихревыми датчиками, а регистрируемая информация с датчика вводится в ЭВМ в виде интегрального показателя, линейного в широком диапазоне измерения. Недостатками данного технического решения является низкая точность измерения низкоамплитудных сигналов, а так же искажения данных в связи с тем, что металлическая пластина, закрепленная на пальце, имеет массу, которая влияет на тремор пальца.
Наиболее технически близок к изобретению измеритель тремора (свидетельство на полезную модель №78655 от 21.07.2008), содержащий корпус, электронную схему регистрации касаний, соединенную с электропроводящим щупом, и прорезной тремометрический планшет, отличающийся тем, что щуп выполнен в виде кольца регулируемого диаметра, тремометрический планшет выполнен в виде металлической панели, электронная схема регистрации касаний содержит счетчик касаний и секундомер. Тремометрический планшет содержит отверстия различного диаметра.
Недостатком является низкая точность прибора, невозможность проследить форму тремора, а также необходимость удерживать в руке щуп, что может вызвать неточности в связи с тем, что щуп имеет массу, влияющую на движения пальцев и руки в целом.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности треморограмм, получение частоты, амплитуды и характера движений по двум осям координат с высокой точностью и возможностью дальнейшей обработки.
Данная задача решается за счет того, что в устройстве, содержащем блок регистрации, блок обработки данных и блок позиционирования, блок регистрации включает инфракрасный лазер, предназначенный для облучения биообъекта, и фотокамеру, предназначенную для высокоскоростной съемки поверхности биообъекта в инфракрасном свете. Блок обработки данных, включает цифровой сигнальный процессор, подключаемый к ЭВМ по технологии USB 2.0. Блок позиционирования биообъекта состоит из подставки под руку, представляющей из себя С-образный профиль из легкого металла с заглушками на торцах, внутри которого по всей длине установлен регулировочный винт с ручкой, опоры под ладонь и стопорного элемента. Опора под ладонь состоит из втулки с винтовой передачей, расположенной внутри С-образного профиля, шпильки, закрепленной на втулке, и накрученной на шпильку регулировочной гайки по высоте пальца эргономической формы. Блоки регистрации и обработки данных выполнены в одном корпусе, который жестко закреплен на подставке под руку перпендикулярно ее основанию.
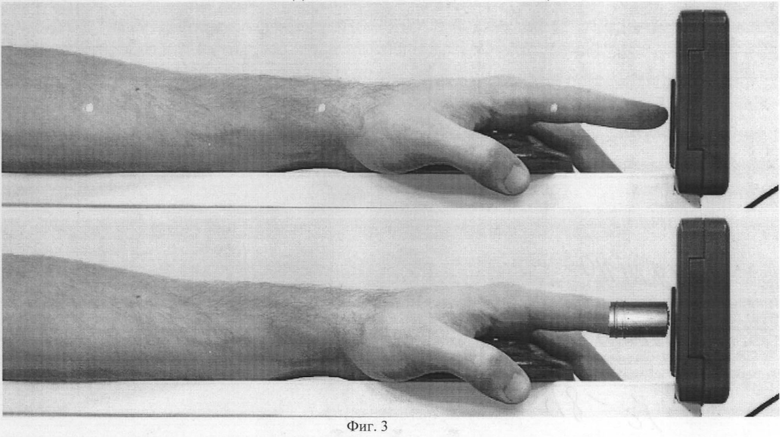
На фиг.1 изображен чертеж устройства в разрезе. На фиг.2 представлена структурная схема устройства измерения тремора пальцев рук. На фиг.3 представлены фотографии прибора в процессе эксплуатации. На фиг.4 показана эпюра выходного сигнала одного из каналов устройства.
Устройство, чертеж которого представлен на фиг.1, состоит из блока позиционирования биообъекта (1) и блоков регистрации и обработки данных (2). Блок позиционирования состоит из подставки под руку (3), представляющей из себя С-образный профиль из легкого металла, на торцах которого установлены заглушки (4) регулировочного винта (5) с ручкой (6), установленного внутри подставки (3), опоры под ладонь (7) и стопорного элемента для подставки под ладонь (8). Опора под ладонь (7) состоит из втулки с винтовой передачей (9), расположенной внутри подставки (3), шпильки (10), закрепленной на втулке (9), и накрученной на нее гайки эргономической формы (11). Перпендикулярно подставке под руку (3) закреплены блоки регистрации и обработки (2), выполненные в виде корпуса (12) и печатной платы (13).
На фиг.2 представлена структурная схема устройства измерения тремора пальцев рук. Устройство состоит из блока регистрации данных (14), подключенного к блоку обработки данных (15), и блока позиционирования биообъекта (1). Блок регистрации (14) состоит из источника инфракрасного лазерного излучения (16), предназначенного для облучения биообъекта, и фотокамеры (17) для съемки поверхности биообъекта (18). Блок обработки данных (15) состоит из цифрового сигнального процессора (19), к которому подключена ЭВМ (20). Биообъект (18) находится на блоке позиционирования (1).
Работает устройство следующим образом (фиг.1). Испытуемый кладет руку на подставку под руку (3), ладонью на опору для ладони (7). Вращением ручки регулировки по длине пальцев (6) добиваются перемещения втулки (9), а вместе с ней и опоры целиком так, чтобы палец находился в 1,5…3,3 мм от печатной платы (13) с блоками обработки и регистрации данных (2). Вращением гайки (11) добиваются того, чтобы палец находился перпендикулярно корпусу блоков регистрации и блока обработки (2). Возможно использование легкого непрозрачного пластикового колпачка с плоской торцевой поверхностью, надетого на палец для уменьшения погрешностей в связи с неидеальной формой пальца (показан на фотографии фиг.3 внизу). Луч от источника инфракрасного лазерного излучения (фиг.2 (16)) падает под углом на палец или колпачок (биообъект (18) фиг.2), отражается и попадает в фотокамеру (фиг.2 (17)), которая делает снимки поверхности с частотой 7080 кадров в секунду.
Кадры имеют разрешение 30×30 пикселей и представляют собой матрицу пикселей, цвет каждого из которых закодирован 8-ю битами, т.е. одним байтом (соответствует 256 градациям серого для каждого пикселя). Таким образом, каждый поступающий в цифровой сигнальный процессор (фиг.2 (19)) из фотокамеры (17) кадр (фрейм) представляет собой последовательность из 900 байт данных. Но процессор не обрабатывает эти 900 байт кадра сразу по поступлении, он ждет, пока в соответствующем буфере (памяти) накопится 1536 байт сведений о пикселях (то есть добавится информация еще о 2/3 последующего кадра). И только после этого цифровой сигнальный процессор (ЦСП) приступает к анализу информации о перемещении биообъекта путем сравнения изменений в последовательных снимках поверхности пальца или колпачка. На основании анализа череды последовательных снимков, представляющих собой матрицу из пикселей разной яркости, ЦСП (фиг.2 (19)) обрабатывает данные снимков и вычисляет относительные значения смещения пальца (колпачка) вдоль координатных осей Х и Y, занося конкретные данные об этом в память ЦСП.
Для определения движущихся точек и характера их движения используется оптический поток серии изображений. Оптический поток определяется как видимое движение яркости изображения. Пусть I(x,y,t) - яркость изображения, которая изменяется во времени, т.е. мы имеем последовательность изображений (пикселей) во времени.
Полагаем, что:
1. Яркость изображения I(x,y,t) зависит от координат x, y.
2. Яркость каждой точки движущегося или статического объекта не меняется во времени.
Пусть некоторый объект на изображении или некоторая точка перемещается во временном интервале dt, тогда перемещение объекта или точки за это время может быть записано как (dx, dy). Используя разложение в ряд Тейлора для функции яркости I(x,y,t) получим следующее выражение:

где «…» - производные яркости (1) более высокого порядка малости. Затем, в соответствии с вышесказанными предположениями, можем записать, что


Деление на dt и введение следующей замены 
 дают уравнение
дают уравнение
которое является уравнением оптического потока, где u и ν являются компонентами области оптического потока в координатах x, y соответственно.
Так как уравнение (4) имеет больше чем одно решение, то требуется большее количество уравнений. Используя уравнение оптического потока для областей связанных пикселей и предполагая, что они имеют одинаковую скорость движения, задачу нахождения оптического потока можно свести к решению системы линейных дифференциальных уравнений вычислительными средствами ЦСП блока обработки данных (15) фиг.2. Ее решение даст нам скорость и направление передвижения связанной области пикселей.
В свою очередь, из памяти ЦСП данные по технологии USB 2.0 передаются в ЭВМ (20), где с помощью специализированного программного обеспечения происходят дальнейшие обработка, хранение и вывод данных по каждой оси координат. Пример выходных данных из ЭВМ (20) по одному из каналов показан на фиг.4.
Устройство может быть использовано в медицинских и профилактических учреждениях для диагностики и предупреждения, связанных с тремором, заболеваний, в спортивной медицине, в охране труда для определения функционального состояния работника, а также при определении профессиональной пригодности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА И ВЫВОДА ДАННЫХ ЭВМ | 2007 |
|
RU2398262C2 |
| СИСТЕМА И ВЫСОКОЭФФЕКТИВНОЕ МНОГОМОДОВОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ПОЛУЧЕНИЯ ОТПЕЧАТКА ЛАДОНИ И ОТПЕЧАТКА ПАЛЬЦА | 2008 |
|
RU2474876C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ СТРЕССА | 2018 |
|
RU2699929C1 |
| Способ регистрации постурального тремора у детей в возрасте 3-6 месяцев | 2020 |
|
RU2743327C1 |
| СПОСОБ СКАНИРОВАНИЯ РИСУНКА КОЖНЫХ ЛИНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363049C2 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ЭССЕНЦИАЛЬНОГО ТРЕМОРА И РАННЕЙ И ПЕРВОЙ СТАДИЙ БОЛЕЗНИ ПАРКИНСОНА С ПОМОЩЬЮ АНАЛИЗА ВСПЛЕСКООБРАЗНОЙ АКТИВНОСТИ МЫШЦ | 2020 |
|
RU2741233C1 |
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2024 |
|
RU2835760C1 |
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2024 |
|
RU2839244C1 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |



Изобретение относится к медицинской технике и может быть использовано при биомеханических исследованиях, в спорте, в нейрофизиологических исследованиях для проведения ранней диагностики заболеваний различных функциональных систем человека, а также при оценке профессиональной пригодности. Устройство содержит блок регистрации, блок обработки данных и блок позиционирования биообъекта. Блок позиционирования состоит из подставки под руку, представляющей собой С-образный профиль из легкого металла с заглушками на торцах, внутри которого по всей длине установлен регулировочный винт с ручкой, опоры под ладонь и стопорного элемента. При этом опора под ладонь состоит из втулки с винтовой передачей, расположенной внутри С-образного профиля, шпильки, закрепленной на втулке, и накрученной на шпильку гайки эргономической формы. Блоки регистрации и обработки выполнены в одном корпусе, который жестко закреплен на подставке под руку перпендикулярно ей. Блок регистрации содержит инфракрасный лазер, предназначенный для облучения биообъекта, и фотокамеру, предназначенную для высокоскоростной съемки поверхности объекта в инфракрасном свете. Блок обработки содержит цифровой сигнальный процессор, подключенный к ЭВМ по технологии USB 2.0. Использование изобретения позволит повысить точность треморограмм, получить частоту, амплитуду и характер движения по двум осям координат с высокой точностью и возможностью дальнейшей обработки. 4 ил.
Устройство для измерения тремора пальцев рук, содержащее блок регистрации, блок обработки данных и блок позиционирования биообъекта, отличающееся тем, что блок регистрации включает инфракрасный лазер, предназначенный для облучения биообъекта, и фотокамеру, предназначенную для высокоскоростной съемки поверхности биообъекта в инфракрасном свете; блок обработки данных состоит из цифрового сигнального процессора, подключаемого к ЭВМ по технологии USB 2.0, а блок позиционирования биообъекта состоит из подставки под руку, представляющей собой С-образный профиль из легкого металла с заглушками на торцах, внутри которого по всей длине установлен регулировочный винт с ручкой опоры под ладонь и стопорного элемента; при этом опора под ладонь состоит из втулки с винтовой передачей, расположенной внутри С-образного профиля, шпильки, закрепленной на втулке, и накрученной на шпильку гайки эргономической формы, а блоки регистрации и обработки выполнены в одном корпусе, который жестко закреплен на подставке под руку перпендикулярно ей.
| RU 2066116 C1, 10.09.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ПСИХОФИЗИОЛОГИЧЕСКОМ СОСТОЯНИИ ЖИВОГО ОБЪЕКТА | 2004 |
|
RU2289310C2 |
| Способ избирательного гидрирования двойных связей ненасыщенных карбонильных соединений | 1952 |
|
SU95989A1 |
| ЦЕНТРОБЕЖНЫЙ ЗОЛОУЛОВИТЕЛЬ | 1947 |
|
SU78655A1 |
| Устройство для исследования тремора | 1984 |
|
SU1209164A2 |
| JP 2004318661 А, 11.11.2004 | |||
| US 20040254502 A1, 16.12.2004. | |||

