Изобретение относится к оптическому приборостроению и может быть использовано в дневных, ночных и дневно-ночных оптических прицелах.
Известен механизм ввода углов прицеливания и выверки ночного стрелкового унифицированного прицела [Изделие НСПУ. Техническое описание и инструкция по эксплуатации. АЛ 3.812.076 ТО]. Основой конструкции механизма ввода углов прицеливания и выверки является винтовая пара, представляющая собой сопряженные ходовой винт и гайку-толкатель. С ходовым винтом жестко связана гайка в виде маховичка, к которой с помощью стопорных винтов фиксируется шкала углов прицеливания. Гайка-толкатель воздействует на элемент прицела, определяющий положение линии прицеливания, а, именно, на оптический компенсатор в виде призмы.
Указанный механизм имеет следующие недостатки: необходимость в момент выверки разъединять, а по окончании выверки вновь фиксировать шкалу углов прицеливания относительно маховичка; высокая вероятность смещения шкалы углов прицеливания при выверке и линии прицеливания в момент фиксации шкалы углов прицеливания; стопорные винты, фиксирующие шкалу углов прицеливания, могут легко потеряться или выйти из строя.
Перечисленные недостатки приводят к усложнению процесса выверки, уменьшению надежности механизмов, увеличению времени и количества используемых боеприпасов при проверке боя оружия.
Наиболее близким по технической сущности к заявляемому - прототипом - является механизм ввода углов прицеливания и выверки прицела по патенту РФ №2201574 (МПК 7 F41G 1/16).
Указанный механизм содержит размещенный в оправе ходовой винт с гайкой-толкателем элемента прицела, определяющего положение линии прицеливания, маховичок и шкалу углов прицеливания, отличающийся тем, что он дополнительно содержит установленное на корпусе прицела основание с цилиндрической направляющей, с которой сопряжена нижняя часть оправы ходового винта, втулку, зафиксированную на основании при помощи фланца с возможностью ее поворота, причем маховичок жестко закреплен на втулке, а верхняя часть оправы ходового винта размещена внутри втулки, образует с ней винтовую пару и зафиксирована от разворота в цилиндрической направляющей основания шпонкой, установленной в пазах, выполненных в нижней части оправы и цилиндрической направляющей основания, шкала углов прицеливания нанесена на маховичке, а ходовой винт оснащен фиксатором положения.
Поворотом маховичка совмещается деление шкалы углов прицеливания, соответствующее дальности до цели, с приливом фланца. При вращении маховичка ходовой винт с гайкой-толкателем элемента прицела, определяющего положение линии прицеливания (сетки), совершает прямолинейное поступательное движение. Перемещение сетки обеспечивает изменение положения линии прицеливания.
Прототип имеет общие с заявляемым устройством признаки: размещенный в оправе первый ходовой винт; закрепленные на первом ходовом винте маховичок и шкала углов прицеливания; фиксатор положения шкалы углов прицеливания.
Недостатком прототипа является то, что, работая маховичком при вводе углов прицеливания, стрелок отрывает глаз от окуляра для визуального контроля правильности ввода угла и теряет цель в поле зрения прицела. Требуется повторное наведение на цель, что приводит к увеличению времени для прицельного выстрела.
Задачей изобретения является расширение функциональных возможностей устройства за счет индикации в поле зрения прицела введенной дальности. Использование заявленного устройства в прицеле обеспечит возможность контроля правильности введения угла прицеливания на заданную дальность до цели непосредственно в поле зрения прицела, а следовательно, сокращение времени на выполнение прицельного выстрела.
Техническим результатом изобретения является повышение точности введения угла прицеливания на заданное расстояние до цели.
Указанный технический результат достигается тем, что известное устройство ввода углов прицеливания и индикации дальности в поле зрения прицела, содержащее размещенный в оправе первый ходовой винт, маховичок и шкалу углов прицеливания, закрепленные на первом ходовом винте, фиксатор положения шкалы углов прицеливания, согласно изобретению, дополнительно содержит второй ходовой винт, фиксатор положения второго ходового винта, дистанционную шкалу, закрепленную на первом ходовом винте, датчик угла поворота, устройство обработки сигнала, цифровые индикаторы и систему переноса изображения цифровых индикаторов в поле зрения прицела, причем второй ходовой винт размещен внутри первого ходового винта вдоль его продольной оси, образует с первым ходовым винтом винтовую пару и является толкателем элемента прицела, определяющего положение линии прицеливания, датчик угла поворота содержит закрепленный по оси вращения на первом ходовом винте растровый лимб, на котором выполнены оптически прозрачные полосы, концентрично размещенные по секторам для формирования двоичного кода, соответствующего углам прицеливания согласно баллистике одного или более типов боеприпасов, а также источник излучения, оптический элемент, формирующий параллельный пучок излучения, диафрагму и линейку фотоприемников, закрепленную на корпусе прицела, причем источник излучения с оптическим элементом и линейка фотоприемников размещены по разные стороны растрового лимба, количество фотоприемников равно количеству разрядов используемого двоичного кода, а выходы фотоприемников связаны с устройством обработки сигнала, выходы которого связаны со входами цифровых индикаторов, оптически связанных с системой переноса изображения цифровых индикаторов в поле зрения прицела.
Система переноса изображения цифрового индикатора в поле зрения прицела может быть выполнена в виде оптически связанных объектива и призменной системы сопряжения с окуляром.
Шкала углов прицеливания выполнена сменной, для различных типов боеприпасов, растровый лимб выполнен сменным.
Элементами прицела, определяющими положение линии прицеливания, могут быть сетка, оборачивающая система, объектив.
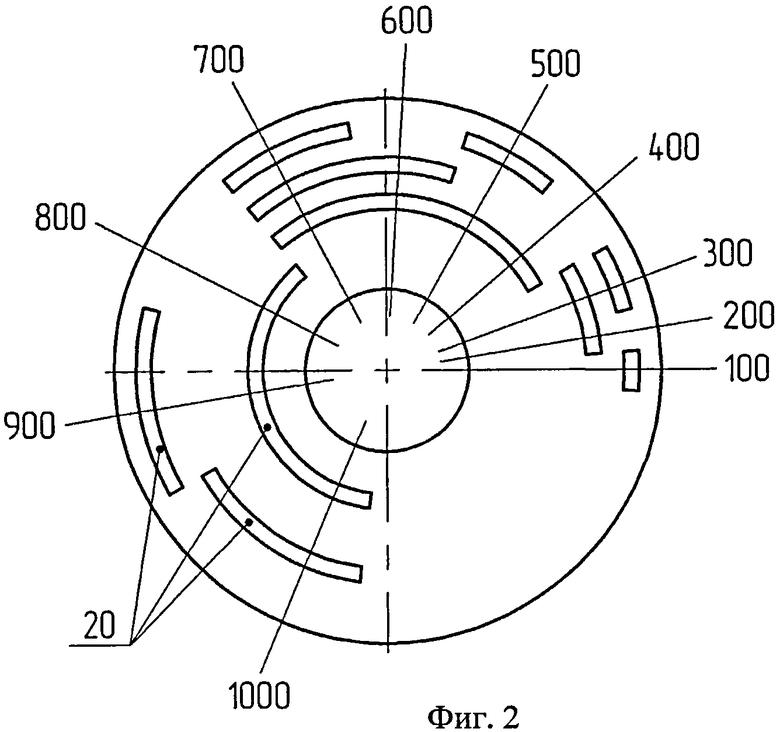
Пример конкретного выполнения устройства приведен на чертежах. На фиг.1 показано устройство ввода углов прицеливания и индикации дальности в поле зрения прицела. На фиг.2 изображен растровый лимб для винтовки калибра 7,62 мм.
Устройство ввода углов прицеливания и индикации дальности в поле зрения прицела (фиг.1) содержит размещенный в оправе 1 ходовой винт 2, ходовой винт 3, размещенный внутри ходового винта 2 вдоль его продольной оси и составляющий с ним винтовую пару, дистанционную шкалу 4, шкалу 5 углов прицеливания, маховичок 6, пробку 7, фиксатор 8 ходового винта 3, фиксатор 9 шкалы углов прицеливания, светодиод 10, оптический элемент 11, диафрагму 12, растровый лимб 13, фотоприемники 14 (линейка фотоприемников), устройство обработки сигнала 15 и цифровые индикаторы 16, оптически связанные с объективом 17 и призменной системой 18 сопряжения с окуляром прицела. Ходовой винт 3 является толкателем элемента прицела, определяющего положение линии прицеливания - тубуса 19 с оборачивающей системой и сеткой прицела. На растровом лимбе 13 (фиг.2) выполнены оптически прозрачные полосы 20.
Маховичок 6, шкала 4 углов прицеливания и дистанционная шкала 5 закреплены на ходовом винте 2. Растровый лимб 13 закреплен по оси вращения на ходовом винте 2. Оптически прозрачные полосы 20 концентрично размещены по секторам для формирования четырехразрядного двоичного кода, соответствующего углам прицеливания для дальностей стрельбы 100, 200, 300, …1000 м согласно баллистике боеприпаса для калибра 7,62 мм.
Светодиод 10, оптический элемент 11 и диафрагма 12 размещены с одной стороны растрового лимба 13. Фотоприемники 14 закреплены на корпусе 1 прицела с другой стороны растрового лимба 13. Диафрагма 12 может быть установлена с другой стороны растрового лимба 13 перед фотоприемниками 14. Количество фотоприемников 14 равно количеству разрядов используемого двоичного кода. В данном примере исполнения устройства использован четырехразрядный двоичный код и, соответственно, использована линейка из четырех фотоприемников 14. Выходы фотоприемников 14 связаны с устройством обработки сигнала 15, выход которого связан со входами цифровых индикаторов 16. Устройство обработки сигнала 15 может быть выполнено в виде микропроцессорного устройства с программой управления и периферийных аналоговых устройств для согласования токов в цепях электрической схемы.
Ввод угла прицеливания для дальности стрельбы производится поворотом на заданный угол маховичка 6, одновременно поворачиваются шкала 4 углов прицеливания и дистанционная шкала 5, жестко связанные с ходовым винтом 2 и ходовым винтом 3, воздействующим на тубус 19. После поворота шкала 4 углов прицеливания фиксируется пружинным фиксатором 9. Одновременно на тот же угол поворачивается и жестко связанный с ходовым винтом 2 растровый лимб 13 с оптически прозрачными полосами 20.
Растровый лимб 13 освещается неподвижно закрепленным светодиодом 10 через оптический элемент 11 и диафрагму 12. Диафрагма 12 вырезает пучок излучения, сопоставимый по размерам с линейкой фотоприемников 14. Фотоприемники 14 регистрируют проходящий через прозрачные полосы 20 растрового лимба 13 световой поток, формируя в двоичном коде информацию об угловом положении растрового лимба 13, связанном с углом поворота маховичка 6. Сигнал с выходов фотоприемников 14 поступает в устройство обработки сигнала 15, который преобразовывает его в двоичный код величины дальности, соответствующей введенному углу прицеливания. В данном примере при установке дальности стрельбы 100 м формируется двоичный код 0001, соответственно 200 м - 0010, 300 м - 0011, 1000 м - 1010.
Двоичный код, соответствующий введенной дальности, затем преобразовывается в код цифрового индикатора 16, который посредством системы переноса изображения цифровых индикаторов в поле зрения прицела - объектива 17 и призменной системы 18 сопряжения с окуляром - отображается в поле зрения окуляра прицела (на чертеже не показан).
Таким образом, предложенное устройство с датчиком угла поворота обеспечивает формирование в системе "угол - код" информации о введенной дальности стрельбы, в зависимости от баллистики используемого боеприпаса.
Заявленное устройство так же, как и прототип, может использоваться для выверки прицела. Выверка осуществляется вращением ходового винта 3, который воздействует на тубус 19 с оборачивающей системой и сеткой прицела. При этом ходовой винт 2 остается неподвижным. Положение ходового винта 3 после выверки фиксируется фиксатором 8. Пробка 7 с резиновой прокладкой предохраняет механизм от загрязнения.
Таким образом, предложенное изобретение, по сравнению с прототипом, имеет более широкие функциональные возможности: наряду с вводом угла прицеливания обеспечивает индикацию в поле зрения прицела введенной дальности. Использование заявленного устройства в прицеле позволяет контролировать правильность введения угла прицеливания на заданную дальность до цели непосредственно в поле зрения прицела, а следовательно, сократить затраты времени на прицеливание.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА УГЛОВ ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ ДАЛЬНОСТИ В ПОЛЕ ЗРЕНИЯ ПРИЦЕЛА | 2013 |
|
RU2536086C2 |
| МЕХАНИЗМ ВВОДА УГЛОВ ПРИЦЕЛИВАНИЯ И ВЫВЕРКИ ПРИЦЕЛА | 2001 |
|
RU2201574C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 1999 |
|
RU2148775C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 1996 |
|
RU2112197C1 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2013 |
|
RU2534504C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2014 |
|
RU2568955C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2013 |
|
RU2532605C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2014 |
|
RU2564214C1 |
| ПРИЦЕЛ-ДАЛЬНОМЕР ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2013 |
|
RU2536186C1 |
Изобретение относится к оптическому приборостроению. Устройство содержит ходовые винты 2, 3, маховичок 6, шкалу 4 углов прицеливания с фиксатором 9, дистанционную шкалу, фиксатор 8 ходового винта 3, устройство 15 обработки сигнала, цифровые индикаторы 16, объектив 17, систему 18 сопряжения с окуляром и датчик угла поворота: растровый лимб 13, оптический элемент 11, диафрагму 12 и фотоприемники 14. На лимбе 13 выполнены оптически прозрачные полосы 20, концентрично размещенные по секторам для формирования двоичного кода, соответствующего углам прицеливания согласно баллистике одного или более типов боеприпасов. Маховичок 6, шкала 4 углов прицеливания, дистанционная шкала 5 и лимб 13 закреплены на ходовом винте 2. Ходовой винт 3 размещен внутри винта 2 вдоль его продольной оси, составляет с ним винтовую пару и при повороте маховичка 6 перемещает тубус 19 с сеткой прицела. При повороте маховичка 6 фотоприемники 14 регистрируют проходящий через полосы 20 световой поток, формируя в двоичном коде информацию об угловом положении лимба 13. Значение дальности отображается на цифровых индикаторах 16 и объективом 17 и системой 18 заводится в окуляр. Техническим результатом изобретения является повышение точности введения угла прицеливания на заданное расстояние до цели. 3 з.п. ф-лы, 2 ил.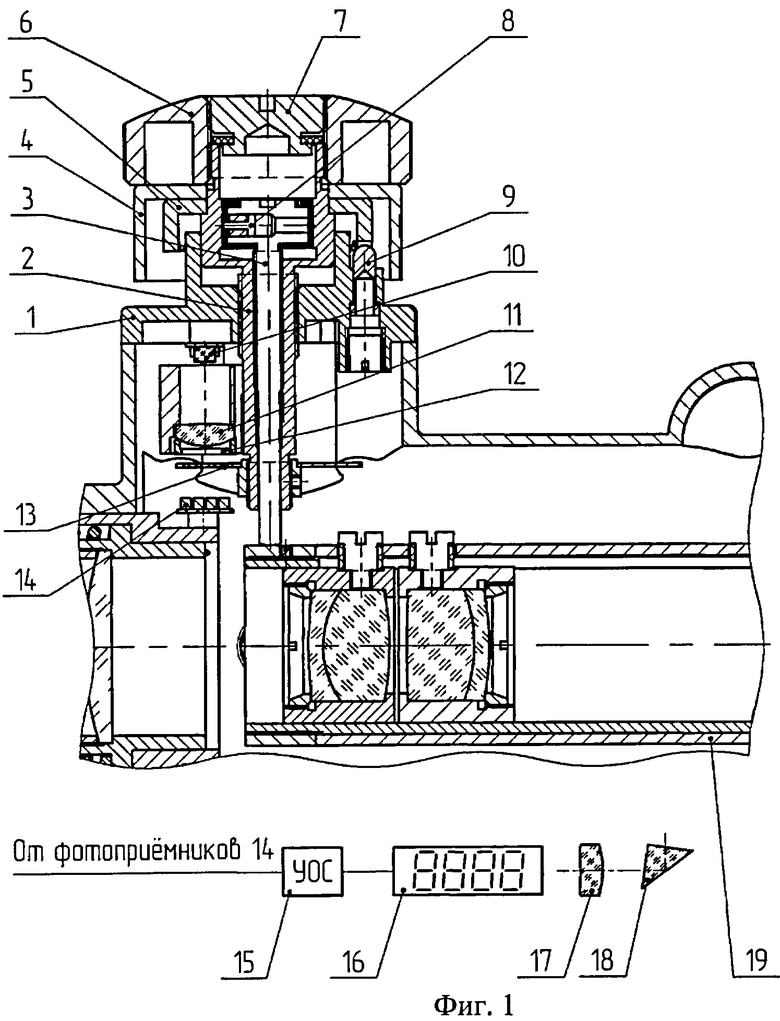
1. Устройство ввода углов прицеливания и индикации дальности в поле зрения прицела, содержащее размещенный в оправе первый ходовой винт, маховичок и шкалу углов прицеливания, закрепленные на первом ходовом винте, фиксатор положения шкалы углов прицеливания, отличающееся тем, что оно дополнительно содержит второй ходовой винт, фиксатор положения второго ходового винта, дистанционную шкалу, закрепленную на первом ходовом винте, датчик угла поворота, устройство обработки сигнала, цифровые индикаторы и систему переноса изображения цифровых индикаторов в поле зрения прицела, причем второй ходовой винт размещен внутри первого ходового винта вдоль его продольной оси, образует с первым ходовым винтом винтовую пару и является толкателем элемента прицела, определяющего положение линии прицеливания, датчик угла поворота содержит закрепленный по оси вращения на первом ходовом винте растровый лимб, на котором выполнены оптически прозрачные полосы, концентрично размещенные по секторам для формирования двоичного кода, соответствующего углам прицеливания согласно баллистике одного или более типов боеприпасов, а также источник излучения, оптический элемент, формирующий параллельный пучок излучения, диафрагму и линейку фотоприемников, закрепленную на корпусе прицела, причем источник излучения с оптическим элементом и линейка фотоприемников размещены по разные стороны растрового лимба, количество фотоприемников равно количеству разрядов используемого двоичного кода, а выходы фотоприемников связаны с устройством обработки сигнала, выходы которого связаны со входами цифровых индикаторов, оптически связанных с системой переноса изображения цифровых индикаторов в поле зрения прицела.
2. Устройство по п.1, отличающееся тем, что система переноса изображения цифрового индикатора в поле зрения прицела выполнена в виде оптически связанных объектива и призменной системы сопряжения с окуляром.
3. Устройство по п.1, отличающееся тем, что шкала углов прицеливания выполнена сменной, для различных типов боеприпасов.
4. Устройство по п.3, отличающееся тем, что растровый лимб выполнен сменным.
| МЕХАНИЗМ ВВОДА УГЛОВ ПРИЦЕЛИВАНИЯ И ВЫВЕРКИ ПРИЦЕЛА | 2001 |
|
RU2201574C1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ТАНКОВЫХ ШАРНИРНЫХ ПРИЦЕЛОВ | 1990 |
|
SU1822241A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 1999 |
|
RU2198370C2 |
| US 7814669 B2, 19.10.2010 | |||
| US 7328515 B2, 12.02.2008. | |||

