Область техники
Настоящее изобретение относится к способу радиосвязи, его базовой станции и пользовательскому терминалу и, в частности, к способу радиосвязи, его базовой станции и пользовательскому терминалу в системе радиосвязи, в которой каждый пользовательский терминал использует разные назначаемые базовой станцией частоты полосы передачи данных для передачи сигналов данных в эту базовую станцию, выполняет мультиплексирование пилот-сигналов с сигналами данных по схеме мультиплексирования с временным разделением и передает результирующий сигнал в базовую станцию.
Уровень техники
В системе радиосвязи, такой как сотовая система, принимающая сторона, как правило, использует известный пилот-сигнал для выполнения синхронизации тактирования и оценки тракта распространения (оценки канала), и на основании каждой из перечисленных операций выполняет демодуляцию данных. Более того, в адаптивном способе модуляции, который обеспечивает возможность улучшения пропускной способности путем адаптивного изменения метода модуляции или скорости кодирования согласно качеству канала, принимающая сторона также использует пилот-сигнал при оценке канала, например для оценки Отношения Сигнала к Шуму (Signal to Interference Ratio, SIR), чтобы определить оптимальный способ модуляции или оптимальную скорость кодирования.
В качестве способа радиодоступа, который устойчив к селективным частотным замираниям из-за наличия множества каналов распространения при широкополосной радиосвязи, используется способ Мультиплексирования с Ортогональным Частотным Разделением (Orthogonal Frequency Division Multiplexing, OFDM). Тем не менее, с точки зрения энергоэффективности терминала существует проблема, заключающаяся в том, что Отношение Пиковой Мощности к Средней Мощности (Peak to Average Power Ratio, PAPR) сигнала передачи имеет большое значение, и соответственно OFDM не подходит в качестве способа передачи по восходящей линии связи. Следовательно, в сотовых системах следующего поколения согласно стандарту Долгосрочной Эволюции Проекта Партнерства 3-го Поколения (3-rd Generation Partnership Project Long Term Evolution, 3GPP LTE) в качестве способа передачи по восходящей линии связи используется передача на одной несущей, где принимающая сторона выполняет выравнивание частоты (см. документ 3GPP TR25814-700 Фиг.9.1.1-1). Передача по одной несущей обозначает, что данные передачи и пилот-сигналы мультиплексируются только по оси времени, и если сравнивать со способом OFDM, согласно которому данные и пилот-сигналы мультиплексируются по оси частоты, то возможно существенно уменьшить PARR.
Передача по одной несущей
Фиг.23 представляет собой пример формата кадра при передаче по одной несущей, а Фиг.24 представляет собой схему, иллюстрирующую выравнивание частоты. Кадр содержит данные DATA и пилот-сигналы PILOT, каждый из которых содержит N выборок и которые мультиплексированы по времени, причем согласно иллюстрации с Фиг.23 в один кадр вставлено два блока пилот-сигналов. При выполнении выравнивания частоты блок 1 отделения данных/пилот-сигнала отделяет данные DATA и пилот-сигналы PILOT, а первый блок 2 Быстрого Преобразования Фурье (Fast Fourier Transform, FFT) выполняет обработку FFT на N выборках данных, чтобы сгенерировать N частотных компонентов, и вводит результат в блок 3 компенсации канала. Второй блок 4 FFT выполняет обработку FFT на N выборках пилот-сигнала, чтобы сгенерировать N частотных компонентов, а блок 5 оценки канала использует эти N частотных компонентов известного пилот-сигнала, чтобы оценить характеристики канала для каждой частоты, и вводит сигнал компенсации канала в блок 3 компенсации канала. Блок 3 компенсации канала перемножает N частотных компонентов, которые были выведены из первого блока 2 FFT, с сигналом компенсации канала для каждой частоты, чтобы выполнить компенсацию канала, и блок 6 Обратного Быстрого Преобразования Фурье (Inverse Fast Fourier Transform, IFFT) выполняет IFFT-обработку N частотных компонентов, компенсированных по каналу, преобразует этот сигнал во временной сигнал и выводит результат.
Последовательность CAZAC
При передаче по одной несущей, когда принимающая сторона выполняет выравнивание частоты, чтобы повысить точность оценки канала в частотной области, желательно, чтобы пилот-сигнал имел постоянную амплитуду в частотной области, то есть, чтобы автокорреляция после произвольного циклического временного сдвига составляла '0'. С другой стороны, если рассматривать аспект PAPR, то желательно, чтобы пилот-сигнал также имел постоянную амплитуду во временной области. Последовательностью, которая обеспечивает возможность реализации этих особенностей, является последовательность с Постоянной Амплитудой и Нулевой Автокорреляцией (Constant Amplitude Zero Auto Correlation, CAZAC), и в системе 3GPP LTE определено применение последовательностей CAZAC в качестве пилот-сигналов восходящей линии связи. Последовательность CAZAC имеет идеальные свойства автокорреляции, так что пилот-сигналы, полученные путем циклического сдвига одной последовательности CAZAC, ортогональны относительно друг друга. В системе 3GPP LTE принят способ использования последовательностей CAZAC с разными величинами циклического сдвига для мультиплексирования пилот-сигналов разных пользователей или для мультиплексирования пилот-сигналов от одного и того же пользователя, передаваемых с разных антенн, и этот способ называется Мультиплексирование с Кодовым Разделением (Code Division Multiplexing, CDM).
Последовательность Задоффа-Чу, которая является типовой последовательностью CAZAC, выражается согласно Уравнению (1) (см. B.M. Popovic, "Generalized Chirp-Like Polyphase Sequences with Optimum Correlation Properties", IEEE Trans. Info. Theory, Vol. 38, pp. 1406-14 09, July 1992).

Здесь, k и L являются простыми числами и выражают номер последовательности и длину последовательности соответственно. Более того, n представляет собой номер символа, q является произвольным целым числом, а L%2 является остатком при делении на 2 и может быть обозначен как Lmod(2). Если принять следующую факторизацию L на простые числа
 (gi является простым числом), то количество последовательностей CAZAC может быть задано следующим уравнением:
(gi является простым числом), то количество последовательностей CAZAC может быть задано следующим уравнением:

Более конкретно, в случае, когда L=12, L=12=22 × 31, то g1=2, e1=2, g2=3 и e2=1, и согласно Уравнению (3) количество последовательностей (последовательностей CAZAC) становится равным 4. Следовательно, количество последовательностей увеличивается по мере увеличения L и уменьшения количества простых коэффициентов. Иначе говоря, в случае, когда L является простым числом, количество  (L) последовательностей CAZAC становится равным (L-1).
(L) последовательностей CAZAC становится равным (L-1).
ZCk(n-c), для которой в последовательности CAZAC ZCk(n) циклически смещается только c, выражается следующим образом:

Как показано в Уравнении (5) ниже,

Корреляция R(τ) между ZCk(n) и ZCk(n-c) становится равной '0' в любой точке за исключением точки, где τ=c, так что последовательности, которые получаются путем применения разных величин циклического сдвига к главной последовательности ZCk(n), становятся ортогональны относительно друг друга.
Когда базовая станция принимает множество пилот-сигналов, которые мультиплексированы путем CDM с использованием циклического сдвига, путем корреляции с главной последовательностью можно отделить пилот-сигналы на основании местоположений, где образуются пики. Способность выдерживать сдвиг множества каналов или сдвиг тактирования приема уменьшается по мере сужения интервала циклического сдвига, так что существует верхний предел для количества пилот-сигналов, которые могут быть мультиплексированы посредством циклического сдвига. Когда количество пилот-сигналов, которые мультиплексируются путем циклического сдвига, принимается равным P, величина cp циклического сдвига, который назначается p-ому пилот-сигналу, может быть определена, например, посредством нижеприведенного уравнения (см. документ 3GPP R1-060374, "Text Proposal On Uplink Reference Signal Structure", Texas Instruments).
 (6)
(6)
Как описано выше, в восходящей линии 3GPP LTE пилот-сигналы и данные мультиплексируются по схеме мультиплексирования с временным разделением и передаются по способу Множественного доступа к Частотным Разделениям на Одной Несущей (Single Carrier-Frequency Division Multiple Access, SC-FDMA). Фиг.25 представляет собой схему, иллюстрирующую строение блока передачи SC-FDMA, где 7' представляет собой блок Дискретного Преобразования Фурье (Discrete Fourier Transform, DFT) размерности NTX, 8' представляет собой блок отображения поднесущих, 9' представляет собой блок Обратного Дискретного Преобразования Фурье (Inverse Discrete Fourier Transform, IDFT) размерности NFFT, 10 представляет собой блок вставки Циклического Префикса (Cyclic Prefix, CP). В 3GPP LTE для уменьшения объема обработки NFFT представляет собой целое число, равное некоторой степени числа 2, а IDFT после отображения поднесущих заменяется на IFFT.
Процесс добавления циклического сдвига c к основной последовательности ZCk(n) может быть выполнен либо до DFT, либо после IFFT. Когда этот процесс выполняется после IFFT, циклический сдвиг может иметь величину c х NFFT/NTX выборок. По существу, процесс является одинаковым, соответственно, в дальнейшем описывается пример, в котором процесс циклического сдвига выполняется до DFT.
Проблемы с предшествующим уровнем техники
Для уменьшения междуячейковых помех необходимо многократно использовать последовательности CAZAC с разными номерами в качестве пилот-сигналов между ячейками. Основанием для этого является то, что по мере увеличения количества повторений, расстояние между ячейками, которые используют одинаковую последовательность, увеличивается, так что вероятность образования серьезных помех уменьшается. Следовательно, возникает необходимость поддерживать большое количество последовательностей CAZAC, и для обеспечения хороших характеристик для последовательностей CAZAC желательно применять длину L последовательности, которая представляет собой большое простое число. Фиг.26 представляет собой схему, иллюстрирующую междуячейковые помехи, где в случае (A), когда количество последовательностей CAZAC, которые могут быть использованы, равно 2, последовательности CAZAC (ZC1) с одинаковыми номером последовательности используются в смежных ячейках так, что между смежными ячейками возникают серьезные помехи. Более того, в случае (B), когда количество используемых последовательностей CAZAC равно 3, последовательности CAZAC с одинаковым номером последовательности не используются, однако количество повторений равно 3, что мало, так что расстояние между ячейками, которые используют последовательности CAZAC с одинаковым номером последовательности, имеет небольшое значение, и существует высокая вероятность возникновения помех между смежными ячейками. В случае (C), когда количество последовательностей CAZAC равно 7, количество повторений равно 7, что много, и соответственно расстояние между ячейками, которые используют последовательности CAZAC с одинаковым номером, становится большим, и вероятность возникновения помех постепенно уменьшается.
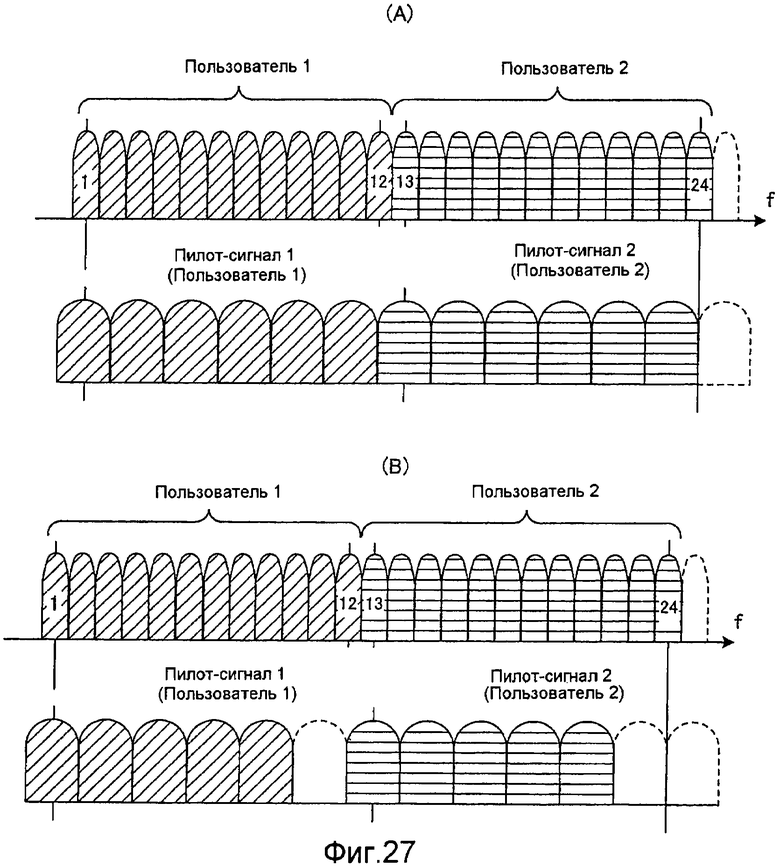
В этой связи можно отметить, что согласно тренду описания 3GPP LTE количество поднесущих, которые заняты данными, принимается равным кратному 12, а интервал поднесущих для пилот-сигналов принимает равным двукратному интервалу для данных для увеличения эффективности передачи, как показано в случае (A) с Фиг.27. В этом случае, когда длина L последовательности CAZAC равна 6, количество последовательностей  (L) становится 2(k=1,2), и используются последовательности CAZAC с одинаковым номером, так что между смежными ячейками возникают помехи из-за пилот-сигналов. Более того, когда длина L последовательности принимается равной 5, то (L) становится 4(k=1,2,3,4), что все еще мало, тем не менее, как показано в (B) с Фиг.27, существуют поднесущие, которые не охватываются пилот-сигналом, так что точность оценки канала уменьшается.
(L) становится 2(k=1,2), и используются последовательности CAZAC с одинаковым номером, так что между смежными ячейками возникают помехи из-за пилот-сигналов. Более того, когда длина L последовательности принимается равной 5, то (L) становится 4(k=1,2,3,4), что все еще мало, тем не менее, как показано в (B) с Фиг.27, существуют поднесущие, которые не охватываются пилот-сигналом, так что точность оценки канала уменьшается.
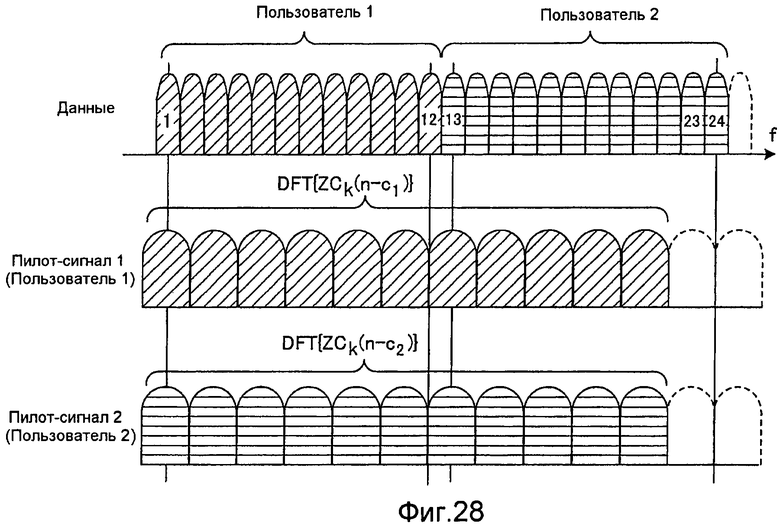
Следовательно, предполагается, что путем увеличения ширины полосы передачи для пилот-сигналов до величины, которая больше ширины полосы передачи для данных, и путем выполнения передачи может быть обеспечена достаточная длина L последовательности (см. 3GPP R1-060925, R1-063183). Фиг.28 иллюстрирует пример случая, когда количество мультиплексированных пилот-сигналов равно 2. Если длина L последовательности принимается равной 12, то согласно уравнениям (2) и (3) количество последовательностей CAZAC равно только 4, и междуячейковые помехи становятся большими (k=4). Следовательно, длина L последовательности выбирается равной простому числу 11. Когда L=11, то (L) равно 10 и могут быть использованы 10 последовательностей CAZAC (k=1~10), так что представляется возможность уменьшения междуячейковых помех. Длина L последовательности не может быть равна 13 или больше. Причиной этого является то, что когда длина L последовательности равна 13 или больше, между смежными частотными диапазонами возникают помехи.
Пилот-сигналы от разных пользователей мультиплексируются по способу CDM путем циклического сдвига. Иначе говоря, CAZAC-последовательность ZCk(n), которая имеет длину L=11 и для которой был выполнен циклический сдвиг c1, используется как пилот-сигнал для пользователя 1, а CAZAC-последовательность ZCk(n), для которой был выполнен циклический сдвиг c2, используется как пилот-сигнал для пользователя 2.
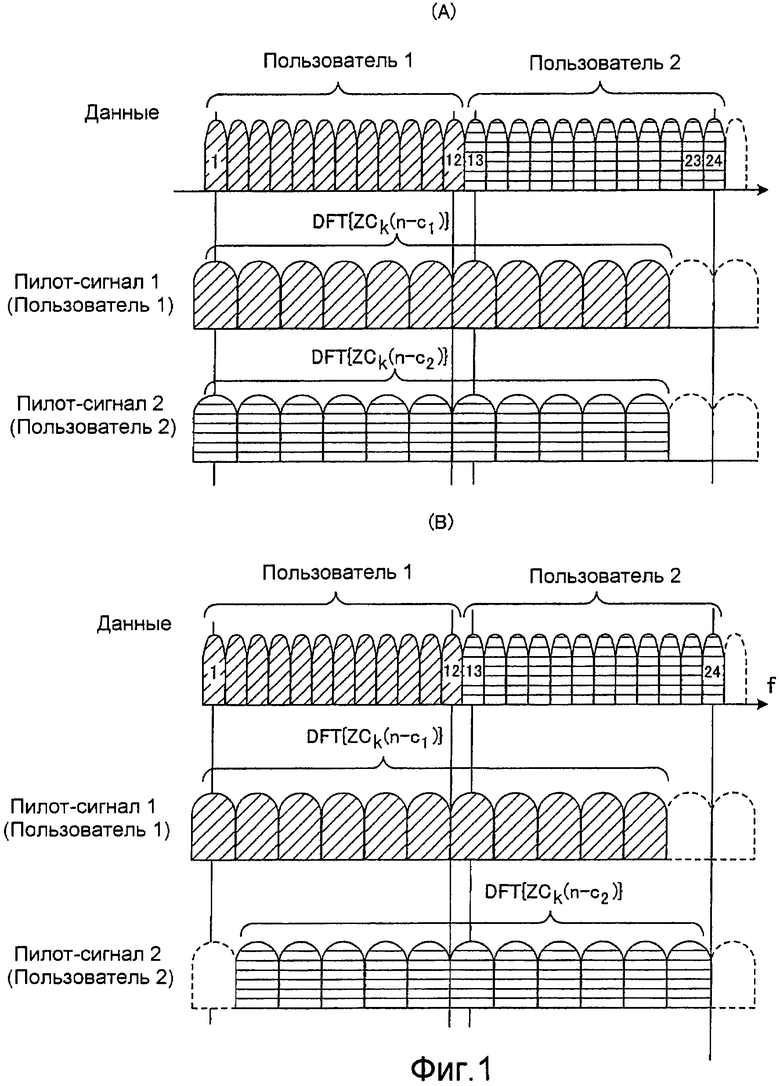
Тем не менее, когда CAZAC-последовательность ZCk(n) с длиной L=11 циклически сдвигается и используется для пользователей 1, 2, то, как можно ясно видеть на Фиг.28, отношение между частотной полосой передачи для пилот-сигналов и частотной полосой передачи для данных отличается для пользователя 1 и для пользователя 2 так, что точность оценки канала отличается. Иначе говоря, поднесущие 23, 24 частотной полосы передачи для пользователя 2 отличаются от частотной полосы передачи для пилот-сигналов, и точность оценки канала для этих поднесущих уменьшается.
Как показано на Фиг.28, согласно текущим спецификациям 3GPP LTE интервал поднесущих для пилот-сигнала равен двукратному интервалу поднесущих для данных. Тем не менее, вышеописанная проблема возникает даже тогда, когда отношение интервалов поднесущих меняется.
Принимая во внимание вышеописанные проблемы, целью настоящего изобретения является обеспечение возможности точной оценки канала поднесущих данных, которые отклоняются от частотной полосы передачи пилот-сигналов.
Еще одной целью настоящего изобретения является обеспечение возможности точной оценки канала поднесущих, назначенных каждому пользователю, даже когда заданная последовательность (например, CAZAC-последовательность ZCk(n)), для которой был выполнен циклический сдвиг на разные величины, используется как пилот-сигналы пользователей, которые требуется мультиплексировать.
Еще одной целью настоящего изобретения является обеспечение возможности точной оценки канала путем отделения пилот-сигналов для каждого пользователя, используя простой способ, даже когда заданная CAZAC-последовательность, для которой был выполнен циклический сдвиг на разные величины, используется как пилот-сигналы пользователей, которые требуется мультиплексировать.
Еще одной целью настоящего изобретения является увеличение точности оценки канала поднесущих данных пользователя, даже при плохом состоянии тракта распространения для этого пользователя.
Раскрытие изобретения
Настоящее изобретение представляет собой способ радиосвязи, базовую станцию и пользовательский терминал в системе радиосвязи, в которой каждый пользовательский терминал вместе с передачей сигнала данных в базовую станцию, используя разные частоты полосы передачи данных, которые назначаются базовой станцией, выполняет мультиплексирование пилот-сигнала с сигналом данных по схеме мультиплексирования с временным разделением и передает результирующий сигнал в базовую станцию.
Способ радиосвязи
Способ радиосвязи настоящего изобретения содержит этап определения полосы передачи пилот-сигнала для каждого пользовательского терминала таким образом, чтобы полоса передачи пилот-сигнал охватывала полосу передачи данных этого пользовательского терминала с частотным смещением; и этап подачи команды каждому пользовательскому терминалу передавать пилот-сигнал, используя частоты упомянутой определенной полосы передачи пилот-сигнала.
Этап подачи команды содержит этап вычисления величины частотного смещения для каждого пользовательского терминала и величины циклического сдвига для последовательности CAZAC, соответствующей количеству мультиплексированных пользовательских терминалов и величине частотного смещения; и этап подачи команды каждому пользовательскому терминалу выполнить циклический сдвиг упомянутой последовательности CAZAC, используемой в качестве пилот-сигнала, на вычисленную величину циклического сдвига, и подачи команды пользовательскому терминалу выполнить частотное смещение упомянутой полосы передачи пилот-сигнала на вычисленную величину частотного смещения.
Способ радиосвязи, сверх того, содержит этап суммирования частотных компонентов части пилот-сигналов, которые не перекрывают друг друга, когда базовая станция приняла мультиплексированные пилот-сигналы, которые были переданы из множества пользовательских терминалов; этап перемножения комбинации результата суммирования и принятых мультиплексированных пилот-сигналов с копией пилот-сигнала в частотной области; и этап преобразования результатов перемножения копии в сигнал временной области и, далее, отделение части сигнала заданного пользовательского терминала от сигнала временной области и выполнение оценки канала.
Способ радиосвязи настоящего изобретения, сверх того, содержит этап получения состояния тракта распространения пользовательских терминалов; и этап назначения в первоочередном порядке средней полосы из всей полосы передачи данных в качестве полосы передачи данных для пользовательского терминала с плохим состоянием тракта распространения и уведомление пользовательских терминалов. Альтернативно, способ радиосвязи настоящего изобретения, сверх того, содержит этап выполнения скачкообразного управления путем периодического назначения средней полосы и крайней полосы из всей полосы передачи данных в качестве полос передачи данных для пользовательских терминалов.
Базовая станция
Базовая станция настоящего изобретения содержит блок управления ресурсами, который определяет полосу передачи пилот-сигнала для каждого пользовательского терминала таким образом, чтобы эта полоса передачи пилот-сигнала охватывала полосу передачи данных этого пользовательского терминала с частотным смещением, и подает команду пользовательскому терминалу передать пилот-сигнал, используя частоты упомянутой определенной полосы передачи пилот-сигнала.
В базовой станции блок управления ресурсами содержит блок вычисления величины циклического сдвига, который вычисляет величину частотного смещения для каждого пользовательского терминала и величину циклического сдвига для последовательности CAZAC, которая соответствует количеству мультиплексированных пользовательских терминалов и величине частотного смещения; и блок подачи команды, который вместе с подачей команды каждому пользовательскому терминалу на выполнение циклического сдвига упомянутой последовательности CAZAC, используемой в качестве пилот-сигнала, на вычисленную величину циклического сдвига, подает команду пользовательскому терминалу на выполнение частотного смещения пилот-сигнала на величину частотного смещения.
Базовая станция, сверх того, содержит блок оценки канала, который выполняет оценку канала для каждого пользовательского терминала, причем блок оценки канала содержит принимающий блок, который принимает мультиплексированные пилот-сигналы, которые передаются из множества пользовательских терминалов; блок суммирования, который суммирует частотные компоненты части пилот-сигналов, которые не перекрывают друг друга; блок перемножения копии, который перемножает комбинацию результатов суммирования и принятых мультиплексированных пилот-сигналов с копией пилот-сигнала в частотной области; блок преобразования, который преобразует результат перемножения копии в сигнал временной области; блок отделения, который отделяет часть сигнала каждого пользовательского терминала от сигнала временной области; и блок оценки, который преобразует отделенный сигнал временной области в сигнал частотной области, чтобы оценить канал каждой частоты.
Блок управления ресурсами получает состояния распространения пользовательских терминалов и в первоочередном порядке назначает среднюю полосу из всей полосы передачи данных в качестве полосы передачи данных для пользовательского терминала с плохим состоянием тракта распространения и уведомляет пользовательские терминалы. Альтернативно, блок управления ресурсами выполняет скачкообразное управление путем периодического назначения средней полосы и крайней полосы из всей полосы передачи данных в качестве полос передачи данных для пользовательских терминалов.
Пользовательский терминал
Пользовательский терминал настоящей системы радиосвязи содержит принимающий блок, который принимает из базовой станции информацию ресурсов восходящей линии связи; и блок генерации пилот-сигнала, который генерирует пилот-сигнал согласно команде в информации ресурсов восходящей линии связи; причем блок генерации пилот-сигнала содержит блок генерации последовательности CAZAC, который на основании информации ресурсов генерирует последовательность CAZAC с заданной длиной последовательности и номером последовательности в качестве пилот-сигнала; первый блок преобразования, который преобразует последовательность CAZAC, которая является пилот-сигналом временной области, в пилот-сигнал частотной области; блок отображения поднесущей, который выполняет отображение компонентов поднесущей пилот-сигнала на основании информации частотного смещения, которая входит в состав информации ресурсов; второй блок преобразования, который преобразует пилот-сигнал с отображенными поднесущими в сигнал временной области; и блок циклического сдвига, который выполняет циклический сдвиг последовательности CAZAC на основании величины циклического сдвига, которая входит в состав информации ресурсов, либо до перового преобразования, либо после второго преобразования.
Краткое описание чертежей
Фиг.1 - схема, иллюстрирующая первый принцип настоящего изобретения;
Фиг.2 - схема, иллюстрирующая второй принцип настоящего изобретения;
Фиг.3 - схема, иллюстрирующая третий принцип настоящего изобретения;
Фиг.4 - схема, иллюстрирующая процесс генерации пилот-сигнала на передающей стороне, который обеспечивает возможность частотного смещения d поднесущих и циклического сдвига (c2-s(k, d, L));
Фиг.5 - схема, иллюстрирующая смещение, выполняемое блоком отображения поднесущих;
Фиг.6 - схема, иллюстрирующая процесс оценки канала на принимающей стороне;
Фиг.7 - схема, иллюстрирующая второй процесс генерации пилот-сигнала;
Фиг.8 - схема, иллюстрирующая способ копирования в передатчике;
Фиг.9 - схема, иллюстрирующая второй процесс оценки канала на принимающей стороне;
Фиг.10 - схема, иллюстрирующая конфигурацию кадра;
Фиг.11 - схема, иллюстрирующая способ отделения пилот-сигнала;
Фиг.12 - схема, иллюстрирующая третий процесс оценки канала на принимающей стороне;
Фиг.13 - схема структуры мобильной станции;
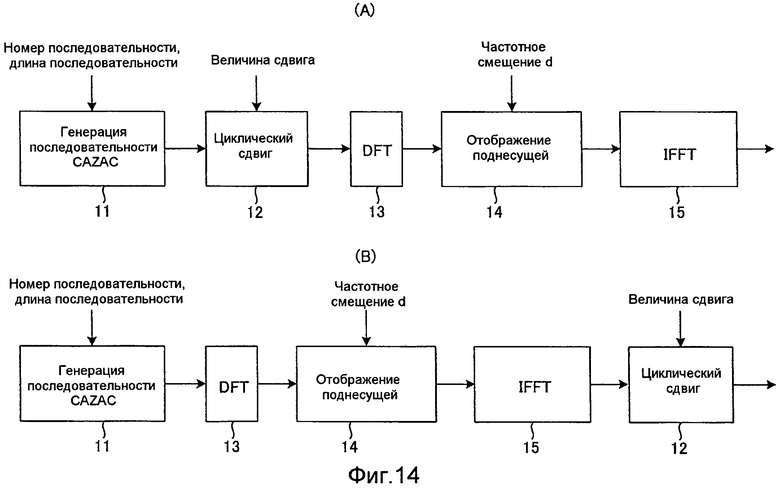
Фиг.14 - схема структуры блока генерации пилот-сигнала;
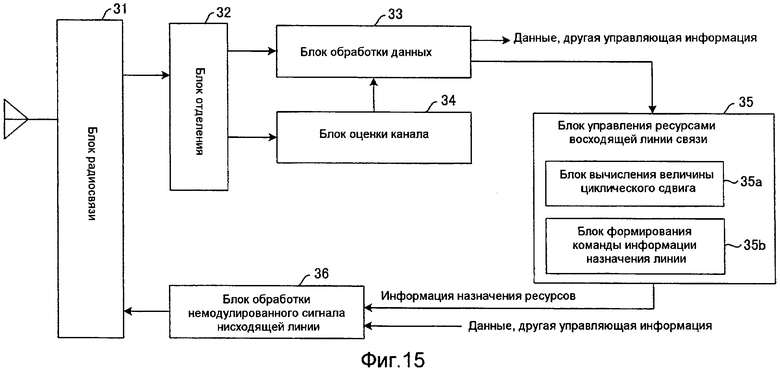
Фиг.15 - схема структуры базовой станции;
Фиг.16 - схема структуры блока оценки канала;
Фиг.17 - схема структуры блока генерации пилот-сигнала и блока оценки канала, который выполняет второй процесс генерации пилот-сигнала и процесс оценки канала;
Фиг.18 - схема структуры блока генерации пилот-сигнала и блока оценки канала, который выполняет третий процесс генерации пилот-сигнала и процесс оценки канала;
Фиг.19 - схема, иллюстрирующая назначение частот, когда количество мультиплексированных пилот-сигналов равно 4;
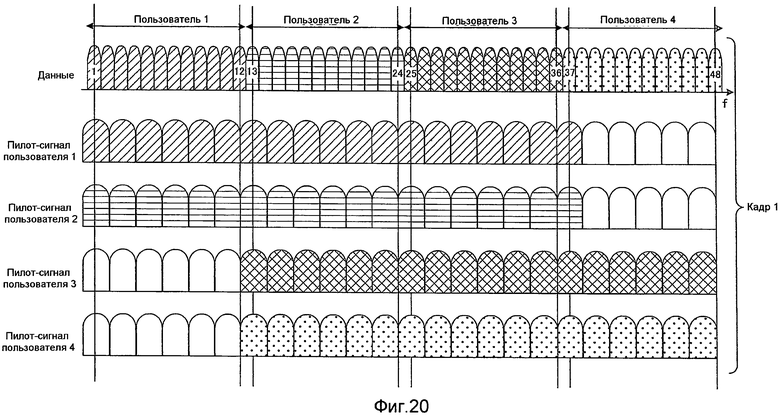
Фиг.20 - схема, иллюстрирующая скачкообразное управление, при котором полосы передачи, которые назначаются пользователям, переключаются после каждого кадра, а также иллюстрирующая назначение для нечетного кадра;
Фиг.21 - схема, иллюстрирующая скачкообразное управление, при котором полосы передачи, которые назначаются пользователям, переключаются после каждого кадра, а также иллюстрирующая назначение для четного кадра;
Фиг.22 - схема структуры блока генерации пилот-сигнала при выполнении скачкообразного управления;
Фиг.23 - пример формата кадра для передачи по одной несущей;
Фиг.24 - схема для описания выравнивания частоты;
Фиг.25 - схема структуры блока передачи SC-FDMA;
Фиг.26 - схема, иллюстрирующая межячейковые помехи;
Фиг.27 - первая схема, иллюстрирующая обычную полосу передачи данных и полосу передачи пилот-сигналов;
Фиг.28 - вторая схема, иллюстрирующая обычную полосу передачи данных и полосу передачи пилот-сигналов.
Лучший вариант осуществления изобретения
(A) Принципы изобретения
Как показано в части (A) с Фиг.1, когда CAZAC-последовательность ZCk(n), к которой был применен циклический сдвиг c1, используется в качестве пилот-сигнала для пользователя 1, и CAZAC-последовательность ZCk(n), к которой был применен циклический сдвиг c2, используется в качестве пилот-сигнала для пользователя 2, то, как было описано со ссылкой на Фиг.28, поднесущие 23, 24 частотной полосы передачи для данных пользователя 2 отличаются от частотной полосы передачи для пилот-сигнала, и точность оценки канала для этой поднесущей уменьшается. На Фиг.1 DFT{ZCk(n-c1)} и DFT{ZCk(n-c2)} представляют собой пилот-сигналы, которые получаются путем выполнения циклических сдвигов c1, c2 CAZAC-последовательности ZCk(n) с длиной L=11, после чего выполняется DFT-обработка последовательностей ZCk(n-c1) и ZCk(n-c2).
Следовательно, как показано в части (B) Фиг.1, в результате применения частотного смещения к пилот-сигналам каждого пользователя для обеспечения соответствия полосе передачи и дальнейшего мультиплексирования пилот-сигналов полоса пропускания для этих пилот-сигналов всегда будет охватывать полосу передачи для этих данных. В примере, показанном в части (B) Фиг.1, пилот-сигнал DFT{ZCk(n-c2)} для пользователя 2 может быть смещен на величину одной поднесущей.
Тем не менее, когда пилот-сигнал DFT{ZCk(n-c2)} смещается, на принимающей стороне корреляция между принятым пилот-сигналом и копией ZCk(n) известного пилот-сигнала не достигает пика при τ=c2, и местоположение пика сдвигается, в результате чего будет невозможно корректно восстановить этот пилот-сигнал и получить оценку канала. Причина, по которой местоположение пика корреляции сдвигается, описана ниже.
Взаимосвязь между частотным смещением и циклическим сдвигом во временной области.
Сначала будет рассмотрена взаимосвязь между частотным смещением и циклическим сдвигом сдвигом во временной области. Если обозначить результат выполнения DFT-преобразования CAZAC-последовательности ZCk(n) как F(m), то F(m) может быть выражено следующим образом:

Используя Уравнения (7) и (4), выражение может быть приведено к следующему виду:

где d(mod L) обозначает, что после деления kc и d на L получается одинаковый остаток.
Можно заметить и выражения (8), что во временной области применение циклического сдвига c к CAZAC-последовательности эквивалентно применению циклического сдвига величиной d поднесущих и фазовым вращением Q k,c в частотной области. Здесь k и L являются простыми числами относительно друг друга, так что c(<L) однозначно определяется согласно k и d. Для облегчения понимания того, что c определяется согласно k, d и L, новое значение c принимается равным c=s(k,d, L). В Таблице 1 показаны величины c, которые соответствуют разным комбинациям s(k,d,L), и k для случая, когда L=11. Например, когда k=1, d=1, L=11 и c=1; и когда k=2, d=1, L=11 и c=6.
s(k,d,L), когда L=11
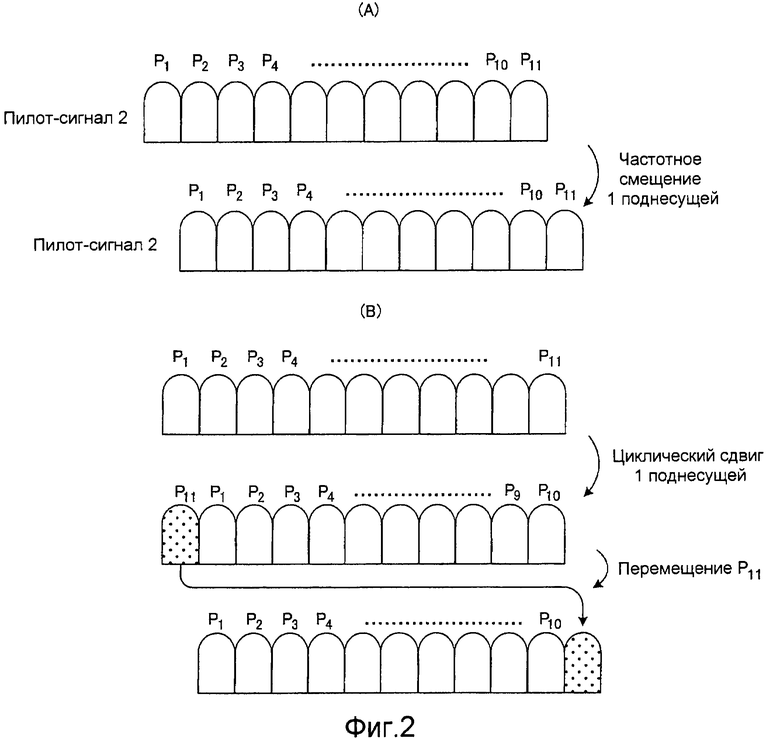
Таким образом, применение частотного смещения величиной в одну поднесущую к пилот-сигналу 2, как показано в части (A) Фиг.2, соответствует перемещению компонента p11 с поднесущей 1 на поднесущую 12 после добавления циклического сдвига величиной в одну поднесущую в частотной области, как показано в части (B) Фиг.2. Как результат, согласно Уравнению (8) местоположение пика корреляции (см. Уравнение (5)) пилот-сигнала 2 сдвигает только s(k,d,L) (τ=c2+s(k,d,L)). Положение пика корреляции пилот-сигнала 1 (τ=c1) не сдвигается, так что пик корреляции пилот-сигнала 2 и пилот-сигнала 1 меняет соответственно только s(k, d=1, L=11), и на принимающей стороне будет невозможно корректно восстановить пилот-сигнал, в результате чего становится невозможным выполнить оценку канала.
Для получения местоположения обычного пика корреляции величина циклического сдвига может быть заменена с c2 на (c2-s(k,d,L)). Иначе говоря, как показано в части (A) Фиг.3, в результате применения как частотного смещения величиной d поднесущих (в данной фигуре d=1), так и циклического сдвига (c2-s(k,d,L)), отношение между пилот-сигналом 1 и пилот-сигналом 2 становится таким, как показано в части (B) Фиг.3. В результате описанных операций, местоположения пиков корреляции пилот-сигнала 1 и пилот-сигнала 2 не сдвигаются, и на принимающей стороне можно корректно восстановить эти пилот-сигналы, в результате чего можно повысить точность оценки канала. То есть можно отделить пилот-сигнал 1 и пилот-сигнал 2 с помощью местоположений (τ=c1,τ=c2) пиков корреляции, как в случае, когда частотное смещение не применяется.
(a) Первый процесс генерации пилот-сигнала и процесс оценки канала
Фиг.4 представляет собой схему для разъяснения процесса генерации пилот-сигнала на передающей стороне, что обеспечивает возможность частотного смещения величиной d поднесущих и циклического сдвига (c2-s(k,d,L)), которые были описаны со ссылкой на Фиг.3.
Блок 11 генерации CAZAC-последовательности генерирует CAZAC-последовательность ZCk(n) в качестве пилот-сигнала с L=11, и блок 12 циклического сдвига циклически смещает CAZAC-последовательность ZCk(n) на величину c2-s(k,d,L), чтобы сгенерировать ZCk(n-c2+s(k,d,L)), и вводит результат в блок 13 DFT. Блок 11 DFT с размерностью NTX (NTX=L=11) выполняет процесс вычисления DFT для ZCk(n-c2+s(k,d,L)), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c2+s(k,d,L))}. Блок 14 отображения поднесущей смещает 11 компонентов p1~p11 пилот-сигнала частотной области на величину d поднесущих (в данной фигуре d=1) и вводит результат в блок 15 IFFT.
Фиг.5 представляет собой схему, иллюстрирующую смещение, выполняемое блоком 14 отображения поднесущей, где (A) иллюстрирует случай, где смещение отсутствует (d=0), и блок 14 отображения поднесущей вводит 11 компонентов p1~p11 пилот-сигнала в частотные терминалы fi, fi+1, fi+2,..., fi+10 блока 15 IFFT и вводит 0 в другие терминалы. В данной фигуре часть (B) иллюстрирует случай, где есть некоторое смещение (d=1), и блок 14 отображения поднесущих вводит 11 компонентов p1~p11 пилот-сигнала в частотные терминалы fi+1, fi+2, fi+3,..., fi+11 и вводит 0 в другие терминалы. Блок 15 IFFT с размерностью NFFT (например, NFFT=128) выполняет обработку вычисления IFFT для введенных компонентов поднесущей, чтобы преобразовать сигнал в сигнал временной области, и блок 16 вставки CP добавляет циклический префикс для предотвращения помех и выводит результат. На Фиг.5 часть (C) иллюстрирует еще один пример случая, когда присутствует смещение (d=1). В этом случае блок 12 циклического сдвига циклически сдвигает CAZAC-последовательность ZCk(n) только на величину c2, чтобы сгенерировать ZCk(n-c2), и вводит результат в блок 13 DFT. Блок 13 DFT выполняет обработку вычисления DFT для ZCk(n-c2), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c2)}. Блок 14 отображения поднесущей вводит компоненты p2~p11 пилот-сигнала в терминалы fi, fi+1, fi+2,..., fi+10 блока 15 IFFT и вводит компонент p1 пилот-сигнала в терминал fi+11 блока 15 IFFT.
Фиг.6 представляет собой схему, иллюстрирующую процесс оценки канала на принимающей стороне.
Пилот-сигнал 1 и пилот-сигнал 2, которые соответственно передаются от пользователя 1 и пользователя 2 (см. Фиг.3), мультиплексируются, чтобы стать компонентами (p1~p12) поднесущей для частот fi, fi+1, fi+2, fi+3,..., fi+11, и вводятся в блок оценки канала. Блок 52 суммирования поднесущих суммирует компоненты p12 и p1 поднесущей, которые не перекрывают друг друга, и принимает результат суммирования в качестве нового компонента p1 поднесущей для частоты f1.
Блок 53 перемножения копии сигнала перемножает копию пилот-сигнала qi и принятый пилот-сигнал pi для каждой поднесущей, блок 54 IDFT выполняет обработку вычисления IDFT для результатов перемножения копии и выводит профиль задержки во временной области. Копия пилот-сигнала получается путем выполнения обработки вычисления DFT известной CAZAC-последовательности ZCk(n) для нулевого циклического сдвига.
Профиль задержки временной области имеет длину L выборок с пиками корреляции в точках t=c1, t=c2, и блок 55 извлечения профиля отделяет пики корреляции посредством t=(c1+c2)/2, чтобы сгенерировать профили PRF1, PRF2 с длиной L/2 выборок для пользователя 1 и пользователя 2. Блок 56a DFT с размерностью L вставляет L/4 нулей с обеих сторон профиля PRF1 длиной L/2, чтобы получить длину L, и выполняет вычисление DFT. Таким образом, величины h1~h11 оценки канала для пользователя 1 получаются из блока 56a DFT на частотах fi, fi+1, fi+2, fi+3,..., fi+10 поднесущей. Аналогично, блок 56b DFT с размерностью L вставляет L/4 нулей с обеих сторон профиля PRF2 длиной L/2, чтобы получить длину L, и выполняет вычисление DFT. Таким образом, величины h2~h12 оценки канала для пользователя 2 получаются из блока 56b DFT на частотах fi+1, fi+2, fi+3,..., fi+11 поднесущей. Тем не менее, поскольку блок 52 суммирования поднесущих суммирует p1 и p12 для получения компонента поднесущей частоты fi, величина оценки канала частоты fi поднесущей, которая выводится из блока 56b DFT принимает в качестве величины h12 оценки канала частоты fi+11 поднесущей.
Исходя из вышеизложенного, при условии, что искажение из-за состояний тракта распространения имеет малую величину, предоставляется возможность отделять пилот-сигнал 1 и пилот-сигнал 2 в полностью ортогональной форме в профиле задержки временной области после того, как компоненты, которые не перекрывают друг друга на принимающей стороне, суммируются и перемножаются с копией сигнала, как показано на Фиг.6. Когда искажение из-за состояний распространения имеет большое значение, предоставляется возможность пропустить суммирование поднесущих и отделить пилот-сигнал 1 и пилот-сигнал 2 в профиле задержки временной области после прямого перемножения с копией.
(b) Второй процесс генерации пилот-сигнала и процесс оценки канала
В первом процессе оценки канала, описанном выше, компоненты p12~p1 поднесущей, которые не перекрывают друг друга, суммируются и результат суммы принимается в качестве компонента частоты fi поднесущей. Тем не менее, когда компонент поднесущей для частоты fi поднесущей принятого сигнала уже получен путем суммирования p12 и p1, то нет необходимости в суммировании поднесущих на принимающей стороне.
Фиг.7 представляет собой схему, иллюстрирующую второй процесс генерации пилот-сигнала, причем часть (A) иллюстрирует поднесущие данных для пользователя 1 и пользователя 2.
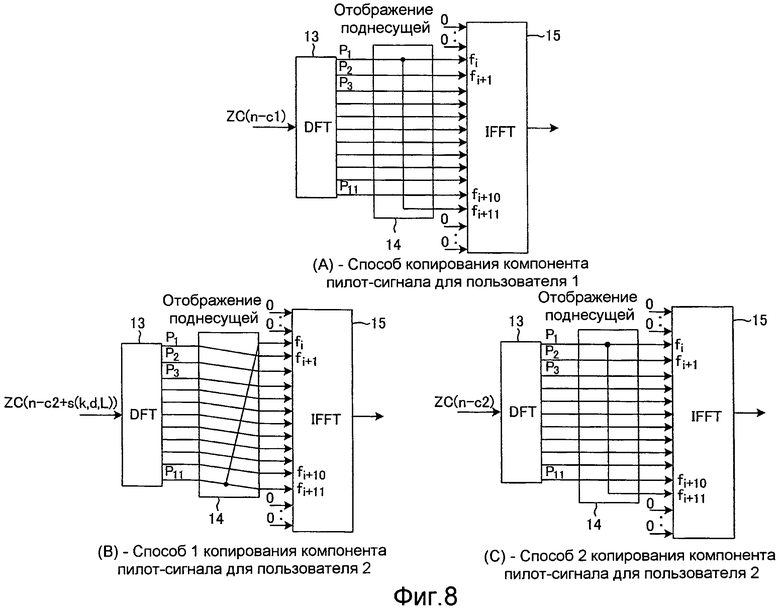
Как показано в части (B) Фиг.7, передающая сторона (пользователь 1) копирует компонент p1 поднесущей частоты fi пилот-сигнала 1 таким образом, что он становится компонентом поднесущей частоты fi+11 и выполняет передачу, и, как показано в части (C) Фиг.7, пользователь 2 копирует компонент 12 поднесущей частоты fi+11 пилот-сигнала 2, так что он становится компонентом поднесущей частоты fi, и выполняет передачу. Таким образом, как показано в части (D) Фиг.7, эти пилот-сигналы мультиплексируются и принимаются принимающей стороной, и компонент поднесущей частоты fi становится суммой p1 и p2, так что отпадает необходимость в суммировании поднесущих на принимающей стороне.
Фиг.8 представляет собой схему, иллюстрирующую способ копирования на передающей стороне, где часть (A) иллюстрирует способ копирования для пилот-сигнала 1 пользователем 1, и в этом способе блок 14 отображения поднесущих вводит компонент p1 поднесущей частоты fi пилот-сигнала 1 также в терминал частоты fi+11 блока 15 IFFT, так что он также является компонентом поднесущей частоты fi+11. На этой фигуре часть (B) иллюстрирует способ копирования для пилот-сигнала 2 пользователем 2, и в этом способе блок 14 отображения поднесущих вводит компонент p12 поднесущей частоты fi+11 пилот-сигнала 12 также и в терминал частоты fi блока 15 IFFT, так что он также является компонентом поднесущей частоты fi. На этой фигуре часть (C) представляет пример реализации способа копирования для пилот-сигнала 2 пользователем 2, и она соответствует части (C) Фиг.5.
Фиг.9 представляет собой схему, иллюстрирующую процесс оценки канала, который выполняется принимающей стороной. Пилот-сигнал 1 и пилот-сигнал 2 (см. (B) и (C) Фиг.7), которые соответственно передаются от пользователя 1 и пользователя 2, мультиплексируются, чтобы стать компонентами (p1~p12) поднесущей для частот fi, fi+1, fi+2, fi+3,..., fi+11, и вводятся в блок оценки канала (см. (D) на Фиг.7).
Блок 53 перемножения копии сигнала для пользователя 1 перемножает копии пилот-сигналов qi (q1~q11) с принятыми пилот-сигналами pi (p1~p11) для каждой поднесущей, и после этого блок 54 IDFT, блок 55 отделения корреляции и блок 56 DFT выполняют обработку тем же образом, что и в случае Фиг.6, чтобы сгенерировать величины h1~h11 оценки канала для пользователя 1.
С другой стороны, блок 53' перемножения копии сигнала для пользователя 2 перемножает копии qi (q1~q11) пилот-сигнала с принятыми пилот-сигналами pi (p2~p12) для каждой поднесущей, и после этого блок 54' IDFT, блок 55' отделения корреляции и блок 56' DFT выполняют такую же обработку, что и для пользователя 1, чтобы сгенерировать величины h2~h12 оценки канала для пользователя 2.
(c) Третий процесс генерации пилот-сигнала и процесс оценки канала
В первом процессе оценки канала, описанном выше, блок 55 отделения корреляции отделяет компоненты пилот-сигнала для пользователя 1 и компоненты пилот-сигнала для пользователя 2, тем не менее, как показано на Фиг.10, когда два блока пилот-сигнала включены в состав одного кадра, например, они могут быть отделены согласно нижеописанному способу. Фиг.11 представляет собой схему, иллюстрирующую способ отделения пилот-сигнала, причем часть (A) иллюстрирует поднесущие данных для пользователя 1 и пользователя 2.
Как показано в части (B) и (C) с Фиг.11, каждый из компонентов поднесущей первого пилот-сигнала 1 (= DFT {ZCk(n-c1)}) и пилот-сигнала 2 (= DFT {ZCk(n-c2+s(k,d,L))}) пользователя 1 и пользователя 2 умножаются на +1 и передаются, как показано в частях (D) и (E), и каждый из компонентов следующего пилот-сигнала 1 и пилот-сигнала 2 умножаются на +1 и -1 соответственно и передаются.
Таким образом, принимающая сторона сначала принимает следующий мультиплексированный пилот-сигнал
DFT{ZCk(n-c1)}×(+1)+DFT{ZCk(n-c2+s(k,d,L)}×(+1),
далее, принимается мультиплексированный пилот-сигнал
DFT{ZCk(n-c1)}×(+1)+DFT{ZCk(n-c2+s(k,d,L)}×(-1).
Следовательно, для того чтобы принимающая сторона генерировала пилот-сигналы для пользователя 1, следующий мультиплексированный пилот-сигнал может быть прибавлен к первому мультиплексированному пилот-сигналу. Иначе говоря, полярности пилот-сигналов 2 отличаются так, что путем суммирования сигналов, пилот-сигналы 2 отбрасываются, и остается только пилот-сигнал 1. Более того, чтобы принимающая сторона сгенерировала пилот-сигналы для пользователя 2, следующий мультиплексированный пилот-сигнал может быть вычтен из первого мультиплексированного пилот-сигнала. Иначе говоря, полярности пилот-сигналов 1 одинаковы, так что путем вычитания сигналов пилот-сигналы 1 отбрасываются и остается только пилот-сигнал 2.
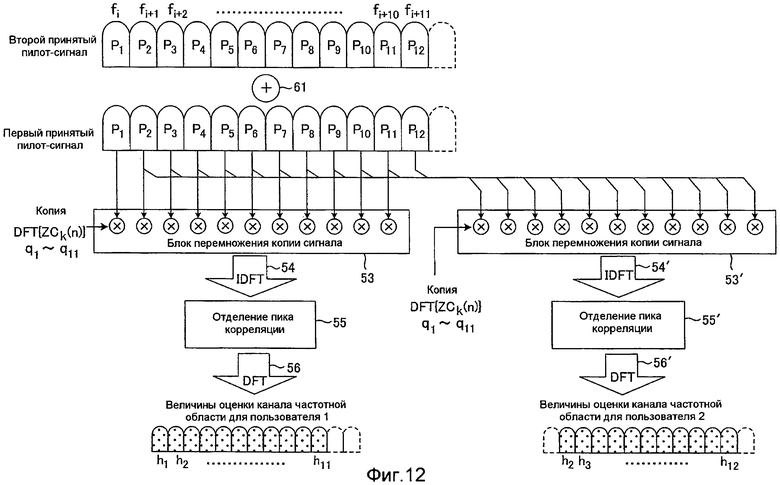
Фиг.12 представляет собой схему, иллюстрирующую процесс оценки канала на принимающей стороне. Пилот-сигнал 1 и пилот-сигнал 2, которые соответственно передаются от пользователя 1 и пользователя 2 (см. (B), (C), (D) и (E) с Фиг.11), мультиплексируются, чтобы стать компонентами (p1~p12) поднесущей для частот fi, fi+1, fi+2, fi+3,..., fi+11, и вводятся в блок оценки канала.
Блок 61 суммирования поднесущих между блоками принимает и сохраняет первый принятый пилот-сигнал. Далее, после приема второго принятого пилот-сигнала, при генерации пилот-сигналов для пользователя 1 блок 61 суммирования поднесущих между блоками суммирует первый и второй принятые пилот-сигналы для каждой поднесущей для генерации компонентов p1~p11 поднесущей для частот fi, fi+1, fi+2, fi+3,..., fi+10 пилот-сигнала 1. Блок 53 перемножения копии сигнала для пользователя 1 перемножает копии qi (q1~q11) пилот-сигналов с принятыми пилот-сигналами pi (p1~p11) для каждой поднесущей, и после этого блок 54 IDFT, блок 55 отделения корреляции и блок 56 DFT выполняют обработку тем же образом, что и в случае Фиг.6, чтобы сгенерировать величины h1~h11 оценки канала для пользователя 1.
С другой стороны, при генерации пилот-сигналов для пользователя 2 блок 61 суммирования поднесущих между блоками вычитает первый и второй пилот-сигналы для каждой поднесущей, чтобы сгенерировать компоненты P2~p12 поднесущей для частот fi+1, fi+2, fi+3,..., fi+11 пилот-сигнала 2. Блок 53' перемножения копии сигнала для пользователя 2 перемножает копии qi (q1~q11) пилот-сигнала с принятыми пилот-сигналами pi (p2~p12) для каждой поднесущей, и после этого блок 54' IDFT, блок 55' отделения корреляции и блок 56' DFT выполняют такую же обработку, что и для пользователя 1, чтобы сгенерировать величины h2~h12 оценки канала для пользователя 2.
Выше был описан случай, когда количество блоков пилот-сигналов равно двум, однако данный третий процесс генерации пилот-сигнала и процесс оценки канала также могут быть применены в случае, когда присутствует четное количество блоков пилот-сигналов. В этом случае базовая станция подает команду определенному пользовательскому терминалу перемножить пилот-сигналы всех блоков на +1, а также подает команду другим пользовательским терминалам перемножить половину пилот-сигналов на +1 и перемножить другую половину пилот-сигналов на -1. Кроме того, когда базовая станция принимает мультиплексированные пилот-сигналы, которые были переданы из каждого пользовательского терминала, базовая станция выполняет вычислительный процесс суммирования или вычитания для пилот-сигналов для всех блоков, так что остается только пилот-сигнал из заданного пользовательского терминала (пользовательского терминала 1 или 2), далее перемножает результат вычисления с копией пилот-сигнала, преобразует результат умножения копии в сигнал временной области, после чего он отделяет часть сигнала пользовательского терминала от сигнала временной области и выполняет оценку канала.
(B) Мобильная станция
Фиг.13 представляет собой иллюстрацию структуры мобильной станции.
В случае, когда генерируются данные передачи по восходящей линии связи, мобильная станция (пользовательский терминал) передает в базовую станцию запрос для назначения ресурсов, и согласно этому запросу базовая станция назначает ресурсы на основании состояния тракта распространения мобильной станции и уведомляет мобильную станцию об информации назначения ресурсов. Блок 21 радиосвязи мобильной станции преобразует радиосигнал, который принимается от базовой станции, в немодулированный сигнал и вводит этот немодулированный сигнал в блок 22 обработки немодулированных сигналов. Блок 22 обработки немодулированных сигналов отделяет от принятого сигнала данные и другую управляющую информацию, а также информацию назначения ресурсов и вводит информацию назначения ресурсов в блок 23 управления ресурсами передачи. В добавление к частотной полосе передачи, тактированию, способу модуляции и т.п. информация назначения ресурсов включает в себя частотную полосу передачи пилот-сигнала, номер k последовательности и длину L CAZAC-последовательности, которая используется в качестве пилот-сигнала, величину циклического сдвига, величину частотного смещения d, и т.п.
Блок 23 управления ресурсами передачи вводит информацию, необходимую для передачи управляющей информации, в блок 24 обработки данных, и вводит информацию, необходимую для генерации и передачи пилот-сигнала, в блок 25 генерации пилот-сигнала. На основании введенной информации блок 24 обработки данных выполняет модуляцию данных и обработку передачи на одной несущей для данных и управляющей информации и выводит результат и согласно инструкции из блока 23 управления ресурсами передачи, блок 25 генерации пилот-сигнала выполняет обработку, такую как генерация CAZAC-последовательности, циклический сдвиг, частотное смещение и т.п., чтобы сгенерировать пилот-сигнал, после чего блок 26 генерации кадра, как показано, например, на Фиг.10, выполняет мультиплексирование с временным разделением шести блоков данных и двух блоков пилот-сигналов, чтобы сгенерировать кадр, и блок 21 радиосвязи передает этот кадр в базовую станцию.
Фиг.14 представляет собой схему, иллюстрирующую структуру блока 25 генерации пилот-сигнала, на данной фигуре показан случай, когда пилот-сигналы генерируются согласно первому процессу генерации пилот-сигнала, описанному со ссылкой на Фиг.3, причем часть (A) иллюстрирует случай, когда циклический сдвиг выполняется до DFT, а часть (B) иллюстрирует случай, когда циклический сдвиг выполняется после IFFT.
В части (A) с Фиг.14, блок 23 управления ресурсами передачи вводит параметры (номер CAZAC-последовательности, длину последовательности, величину циклического сдвига и частотное смещение), которые входят в информацию назначения ресурсов, принятую от базовой станции, и которые необходимы для генерации и передачи пилот-сигналов в соответствующие блоки.
Блок 11 генерации CAZAC-последовательности генерирует CAZAC-последовательность ZCk(n) с заданной длиной L последовательности и номером k последовательности в качестве пилот-сигнала, и блок 12 циклического сдвига выполняет циклический сдвиг CAZAC-последовательности ZCk(n) на величину c выборок согласно инструкции и вводит полученную последовательность ZCk(n-c) в блок 13 DFT. Например, для пилот-сигнала 1, показанного в части (B) с Фиг.3, блок 12 циклического сдвига сдвигает ZCk(n) точно на величину c1, чтобы сгенерировать ZCk(n-c1), а для пилот-сигнала 2 блок 12 циклического сдвига сдвигает ZCk(n) точно на величину c2-s(k,d,L), чтобы сгенерировать ZCk(n-c2+s(k,d,L)), и вводит результаты в блок 13 DFT. Блок 13 DFT с размерностью NTX (NTX=L) выполняет обработку DFT на введенном пилот-сигнале ZCk(n-c), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c)} частотной области. На основании величины частотного смещения согласно инструкции, блок 14 отображения поднесущей управляет позицией отображения пилот-сигнала и выполняет частотное смещение, а блок 15 IFFT с размерностью NFFT (NFFT=128) выполняет обработку IFFT на введенных компонентах поднесущей и преобразует этот сигнал в сигнал временной области и вводит его в блок 26 генерации кадра.
Часть (B) Фиг.14 иллюстрирует структуру блока 25 генерации пилот-сигнала для случая, когда циклический сдвиг выполняется после IFFT, где выполняется циклический сдвиг величиной c х NFFT/NTX выборок, в данном случае блок 12 циклического сдвига обеспечивает такой же результат, что и в случае, показанном в части (A) Фиг.14.
(C) Базовая станция
Фиг.15 представляет собой схему, иллюстрирующую структуру базовой станции.
Когда генерируются данные передачи по восходящей линии связи, мобильная станция (пользовательский терминал) выполняет процедуру для установления линии связи с базовой станцией, и в этой процедуре передает состояние тракта распространения в базовую станцию. Иначе говоря, мобильная станция принимает общий пилот-сигнал, который был передан из базовой станции, и выполняет радиоизмерение (измерение SIR или SNR), после чего она передает результаты этого радиоизмерения в базовую станцию в качестве состояния тракта распространения. Например, базовая станция разделяет полосу передачи на множество частотных полос передачи и передает общие пилот-сигналы для каждой частотной полосы передачи, после чего мобильная станция выполняет радиоизмерения для каждой частотной полосы передачи и передает результат измерения в базовую станцию. После приема запроса назначения ресурсов, вместе с получением состояния тракта распространения от мобильной станции, базовая станция назначает ресурсы на основании состояния тракта распространения от мобильной станции и передает информацию назначения ресурсов в мобильную станцию.
Блок 21 радиосвязи преобразует радиосигнал, который был принят от мобильной станции, в немодулированный сигнал, и блок 32 отделения отделяет данные/управляющую информацию и пилот-сигналы, после чего он вводит эти данные/управляющую информацию в блок 33 обработки данных и вводит пилот-сигналы в блок 34 оценки канала. Блок 33 обработки данных и блок 34 оценки канала содержат структуру выравнивания частоты, показанную на Фиг.24.
Блок 33 обработки данных демодулирует информацию состояния тракта распространения, которая была передана из мобильной станции в момент установления линии связи, и вводит эту информацию в блок 35 управления ресурсами восходящей линии связи. Блок 35 управления ресурсами восходящей линии связи назначает ресурсы на основании состояния тракта распространения, создает информацию назначения ресурсов и вводит эту информацию в блок 36 обработки немодулированных сигналов нисходящей линии связи. В добавление к частотной полосе передачи, тактированию, способу модуляции и т.п., информация назначения ресурсов включает в себя номер k последовательности и длину L CAZAC-последовательности, которая используется в качестве пилот-сигнала, величину циклического сдвига, величину частотного смещения d и т.п. Блок 36 обработки немодулированных сигналов нисходящей линии связи выполняет мультиплексирование с временным разделением для данных, управляющей информации и информации назначения ресурсов, и передает результирующий сигнал из блока 31 радиосвязи.
После приема информации назначения ресурсов мобильная станция выполняет обработку так, как описано со ссылкой на Фиг.13 и 14, и передает кадр, содержащий данные и пилот-сигналы.
Блок 34 оценки канала использует пилот-сигналы, которые были отделены и введены блоком 32 отделения, чтобы выполнить первый процесс оценки канала, как было описано со ссылкой на Фиг.6, и, далее, вводит величины оценки канала в блок 33 обработки данных. Блок 33 обработки данных выполняет компенсацию канала на основании величин оценки канала и на основании результатов компенсации канала демодулирует данные. Блок 35 управления ресурсами восходящей линии связи содержит блок 35a вычисления величины циклического сдвига и блок 35b формирования инструкции информации назначения линии.
Фиг.16 представляет собой схему, иллюстрирующую структуру блока 34 оценки канала, где одинаковые ссылочные номера обозначают одинаковые элементы, показанные на Фиг.6.
Блок 51 DFT выполняет DFT-обработку пилот-сигнала, который вводится из блока отделения и преобразует этот сигнал в пилот-сигнал частотной области (компоненты p1~p12 поднесущей). Блок 52 суммирования поднесущих суммирует компоненты p12 и p1 поднесущей, которые не перекрывают друг друга, и назначает результат суммирования в качестве нового компонента p1 поднесущей для частоты f1.
Блок 53 перемножения копии сигнала перемножает копии qi пилот-сигналов с принятыми пилот-сигналми pi для каждой поднесущей, а блок 54 IDFT выполняет IDFT-обработку результата перемножения копии, чтобы вывести пилот-сигнал временной области. Блок 55 извлечения профиля отделяет выведенный сигнал IDFT в точке t=(c1+c2)/2, и когда этот сигнал является сигналом, принятым от пользователя 1, он выбирает профиль PRF1 (см. Фиг.6), далее блок 56 DFT выполняет DFT-обработку профиля PRF1 и выводит величины h1~h11 оценки канала. С другой стороны, когда упомянутый сигнал является сигналом, принятым от пользователя 2, блок 55 извлечения профиля выбирает профиль PRF2, далее блок 56 DFT выполняет DFT-обработку профиля PRF2 и выводит величины h2~h12 оценки канала.
(D) Второй блок генерации пилот-сигнала и блок оценки канала
Часть (A) Фиг.17 представляет собой схему, иллюстрирующую структуру блока генерации пилот-сигнала, который выполняет второй процесс генерации пилот-сигнала, описанный выше со ссылкой на Фиг.7, причем на данной схеме одинаковые ссылочные номера обозначают одинаковые элементы, показанные в части (A) Фиг.14. Этот блок генерации пилот-сигнала отличается тем, что выполняются две дополнительные операции: блок 14 отображения поднесущей на основании величины частотного смещения d выполняет отображение поднесущей, и выполняется копирование компонентов пилот-сигнала специфицированных поднесущих; остальные операции те же.
Блок 11 генерации CAZAC-последовательности генерирует CAZAC-последовательность ZCk(n) с длиной L последовательности и номером k последовательности согласно инструкции в качестве пилот-сигнала, и блок 12 циклического сдвига выполняет циклический сдвиг CAZAC-последовательности ZCk(n) на заданную величину в c выборок и вводит полученную последовательность ZCk(n-c) в блок 13 DFT. Например, в случае пилот-сигнала 1 для пользователя 1, показанного в части (B) с Фиг.7, блок 12 циклического сдвига сдвигает ZCk(n) на величину c1, чтобы сгенерировать ZCk(n-c1), а в случае пилот-сигнала 2 для пользователя 2 блок 12 циклического сдвига сдвигает ZCk(n) на величину c2-s(k,d,L), чтобы сгенерировать ZCk(n-c2+s(k,d,L)), и вводит результаты в блок 13 DFT. Блок 13 DFT с размерностью NTX (NTX=L) выполняет DFT-обработку пилот-сигнала ZCk(n-c), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c)} частотной области.
Блок 14 отображения поднесущей выполняет отображение поднесущей на основании информации копии и информации частотного смещения, которая была задана из блока 23 управления ресурсами передачи. Например, для пилот-сигнала 1 пользователя 1, показанного в части (B) Фиг.7, блок 14 отображения поднесущей выполняет процесс отображения поднесущей, показанный в части (A) Фиг.8, а для пилот-сигнала 2 пользователя 2, показанного в части (C) Фиг.7, блок 14 отображения поднесущей выполняет отображение поднесущей, показанное в части (B) Фиг.8. Блок 15 IFFT с размерностью NFFT (например, NFFT=128) выполняет IFFT-обработку компонентов поднесущей, которые вводятся для преобразования сигнала в пилот-сигнал временной области, и вводит результат в блок 26 генерации кадра.
Часть (B) Фиг.17 представляет собой схему, иллюстрирующую структуру блока 34 оценки канала, который выполняет второй процесс оценки канала, описанный выше со ссылкой на Фиг.9, причем на данной схеме одинаковые ссылочные номера обозначают одинаковые элементы, показанные на Фиг.16. Этот блок 34 оценки канала отличается тем, что блок 52 суммирования поднесущих был исключен и добавлен предопределенный процесс перемножения, который выполняется блоком 53 умножения копии сигнала.
В добавление к DFT-обработке пилот-сигнала, вводимого из блока 32 отделения, блок 51 DFT преобразует этот сигнал в пилот-сигнал частотной области (компоненты p1~p12 поднесущей). В случае пилот-сигнала 1 от пользователя 1, блок 53 умножения копии сигнала перемножает компоненты p1~p11 поднесущих fi, fi+1, fi+2, fi+3,..., fi+10 принятого пилот-сигнала, который выводится из блока 51 DFT, с копиями q1~q11 сигнала, а в случае пилот-сигнала 2 от пользователя 2, перемножает компоненты p2~p12 поднесущих fi+1, fi+2, fi+3,..., fi+11 принятого пилот-сигнала, который выводится из блока 51 DFT с копиями сигналов.
После этого блок 54 IDFT выполняет IDFT-обработку результата перемножения копии и выводит профиль задержки временной области. Блок 55 извлечения профиля отделяет выведенный IDFT сигнал в точке t=(c1+c2)/2, и когда этот сигнал является сигналом, принятым от пользователя 1, выбирает профиль PRF1 (см. Фиг.6), далее блок 56 DFT выполняет DFT-обработку профиля PRF1 и выводит величины h1~h11 оценки канала. С другой стороны, когда упомянутый принятый сигнал является сигналом, принятым от пользователя 2, блок 55 извлечения профиля выбирает профиль PRF2, далее блок 56 DFT выполняет DFT-обработку профиля PRF2 и выводит величины h2~h12 оценки канала.
(E) Третий блок генерации пилот-сигнала и блок оценки канала
Часть (A) Фиг.18 представляет собой схему, иллюстрирующую структуру блока генерации пилот-сигнала, который выполняет третий процесс генерации пилот-сигнала, описанный выше со ссылкой на Фиг.11, причем на данной схеме одинаковые ссылочные номера обозначают одинаковые элементы, показанные в части (A) Фиг.14. Этот блок генерации пилот-сигнала отличается только тем, что был добавлен блок 61 назначения полярности; остальные операции те же.
Блок 11 генерации CAZAC-последовательности генерирует CAZAC-последовательность ZCk(n) с заданной длиной L последовательности и номером k последовательности в качестве пилот-сигнала, и блок 12 циклического сдвига выполняет циклический сдвиг CAZAC-последовательности ZCk(n) на заданную величину в c выборок и вводит полученную последовательность ZCk(n-c) в блок 13 DFT. Например, в случае пилот-сигнала 1 для пользователя 1, показанного в части (B) и (D) с Фиг.11, блок 12 циклического сдвига сдвигает ZCk(n) на величину c1, чтобы сгенерировать ZCk(n-c1), а в случае пилот-сигнала 2 для пользователя 2 блок 12 циклического сдвига сдвигает ZCk(n) на величину c2-s(k,d,L), чтобы сгенерировать ZCk(n-c2+s(k,d,L)), и вводит результат в блок 13 DFT. Блок 13 DFT с размерностью NTX (NTX=L) выполняет DFT-обработку введенного пилот-сигнала ZCk(n-c), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c)} частотной области.
Блок 14 отображения поднесущей выполняет отображение поднесущей на основании информации частотного смещения, которая была задана из блока 23 управления ресурсами передачи. Блок 61 прикрепления полярности прикрепляет полярность, задаваемую из блока 23 управления ресурсами передачи, к выводу из блока 14 отображения поднесущей и выводит результат в блок 15 IFFT. Например, в случае пилот-сигнала 1 для пользователя 1, для первого и второго блоков пилот-сигналов (см. (B) и (D) с Фиг.11) задается полярность +1, и блок 61 прикрепления полярности перемножает все компоненты поднесущей, которые выводятся из блока 14 отображения поднесущей, на +1 и вводит результат в блок 15 IFFT. Кроме того, в случае пилот-сигнала 2 для пользователя 2, для первого блока пилот-сигналов задается полярность +1, а для второго блока пилот-сигналов задается полярность -1 (см. (C) и (E) с Фиг.11), и блок 61 прикрепления полярности перемножает все компоненты поднесущей, которые выводятся из блока 14 отображения поднесущей, на +1 для первого блока пилот-сигналов и на -1 для второго блока пилот-сигналов и вводит результат в блок 15 IFFT.
Блок 15 IFFT с размерностью NFFT (например, NFFT=128) выполняет IFFT-обработку введенных компонентов поднесущей, чтобы преобразовать сигнал в пилот-сигнал временной области, и вводит результат в блок 26 генерации кадра.
Часть (B) Фиг.18 представляет собой схему, иллюстрирующую структуру блока 34 оценки канала, который выполняет третий процесс оценки канала, описанный выше со ссылкой на Фиг.12, причем на данной схеме одинаковые ссылочные номера обозначают одинаковые элементы, показанные на Фиг.16. Этот блок оценки канала отличается тем, что вместо блока 52 суммирования поднесущих предоставлен блок 62 суммирования поднесущих между блоками.
В добавление к выполнению DFT-обработки первого блока пилот-сигналов, вводимого из блока 32 отделения, блок 51 DFT преобразует сигнал в пилот-сигнал частотной области (компоненты p1~p12 поднесущей), и блок 62 суммирования поднесущих между блоками сохраняет этот пилот-сигнал (компоненты поднесущей p1~p12) во внутренней памяти. После этого, в добавление к выполнению DFT-обработки второго блока пилот-сигналов, вводимого из блока 32 отделения, блок 51 DFT преобразует сигнал в пилот-сигнал частотной области (компоненты p1~p12 поднесущей), и вводит этот сигнал в блок 62 суммирования поднесущих между блоками.
Когда принимается пилот-сигнал 1 от пользователя 1, блок 62 суммирования поднесущих между блоками суммирует пилот-сигнал (компоненты p1~p12) поднесущей сохраненного первого блока и пилот-сигнал (компоненты p1~p12 поднесущей) второго блока для каждой поднесущей. Таким образом мультиплексированные компоненты пилот-сигнала от другого пользователя (например, пользователя 2) удаляются. Более того, когда принимается пилот-сигнал 2 от пользователя 2, блок 62 суммирования поднесущих между блоками вычитает пилот-сигнал (компоненты p1~p12 поднесущей) второго блока из пилот-сигнала (компоненты p1~p12 поднесущей) сохраненного первого блока для каждой поднесущей. Таким образом, мультиплексированные компоненты пилот-сигнала от другого пользователя (например, пользователя 1) удаляются.
Когда принимается пилот-сигнал 1 от пользователя 1, блок 53 умножения копии сигнала перемножает компоненты p1~p11 поднесущих fi, fi+1, fi+2, fi+3,..., fi+10 принятого пилот-сигнала, который выводится из блока 62 суммирования поднесущих между блоками, с копиями q1~q11 сигнала, а когда принимается пилот-сигнал 2 от пользователя 2, перемножают компоненты p2~p12 поднесущих fi+1, fi+2, fi+3,..., fi+11 принятого пилот-сигнала, который выводится из блока 62 суммирования поднесущих между блоками, с копиями q1~q11 сигнала.
После этого блок 54 IDFT выполняет IDFT-обработку результата перемножения копии и выводит пилот-сигнал временной области. Блок 55 извлечения профиля отделяет выведенный IDFT сигнал в точке t=(c1+c2)/2, и когда этот сигнал является сигналом, принятым от пользователя 1, выбирает профиль PRF1 (см. Фиг.6), далее блок 56 DFT выполняет DFT-обработку профиля PRF1 и выводит величины h1~h11 оценки канала. С другой стороны, когда упомянутый сигнал является сигналом, принятым от пользователя 2, блок 55 извлечения профиля выбирает профиль PRF2, далее блок 56 DFT выполняет DFT-обработку профиля PRF2 и выводит величины h2~h12 оценки канала.
(F) Адаптивное управление
Как описано выше, входящий в состав базовой станции (см.Фиг.15) блок 35 управления ресурсами восходящей линии связи определяет частотные полосы передачи для пилот-сигналов, номер и длину L CAZAC-последовательности, величину циклического сдвига, частотное смещение d и т.п. на основании состояния тракта распространения мобильной станции и уведомляет об этом мобильную станцию. Более того, блок 35 управления ресурсами восходящей линии связи базовой станции также определяет количество мультиплексирования в частотной полосе передачи на основании состояния тракта распространения каждой мобильной станции.
Фиг.19 представляет собой схему, иллюстрирующую назначения частот, когда количество мультиплексирования равно 4, причем первые 12 поднесущих назначаются пользователю 1, вторые 12 поднесущих назначаются пользователю 2, третьи 12 поднесущих назначаются пользователю 3, а последние 12 поднесущих назначаются пользователю 4, причем CAZAC-последовательность ZCk(n) с длиной L=19 используется в качестве пилот-сигнала для каждого пользователя путем изменения величины циклического сдвига.
Частотное смещение пилот-сигнала определяется так, чтобы полоса передачи данных для каждого пользователя как можно больше охватывалась полосой передачи пилот-сигнала. Блок 35a циклического сдвига (см.Фиг.15) вычисляет величину циклического сдвига для каждого пользователя согласно следующему уравнению:

Здесь, i и p обозначают номер полосы передачи данных и номер пользователя соответственно. Кроме того, s(k,d,L) представляет собой величину циклического сдвига для последовательности номер k с длиной L и частотного смещения d, соотношение которых задается согласно следующему уравнению:

где cp для p-го пользователя может быть вычислено, например, согласно следующему уравнению:

где P выражает количество пилот-сигналов (количество пользователей), которые мультиплексируются посредством циклического сдвига. В случае с Фиг.19, величины циклических сдвигов c1~c4 для пользователей 1~4 принимают следующие значения:
c1=0
c2=[L/4]
c3=[2 · L/4]-s(k,d,L)
c4=[3 · L/4]-s(k,d,L)
Таким образом, в зависимости от способа приема пилот-сигналов, характеристики оценки канала на обоих концах полосы передачи пилот-сигнала могут быть плохими, а характеристики оценки канала для средней части могут быть хорошими. Иначе говоря, в полосе пропускания для поднесущих 1~12 и 37~48 на Фиг.19, точность оценки канала может быть низкой, и в полосе передачи для поднесущих 13~24 и 25~36, точность оценки канала может быть высокой.
Следовательно, середина полосы передачи для поднесущих 13~24 и 25~36 назначается для пользователей с плохим состоянием тракта распространения, а оба конца полосы передачи для поднесущих 1~12 и 37~48 назначаются пользователям с хорошим состоянием тракта распространения. Таким образом, исключается ситуация, когда есть пользователи, для которых точность оценки канала будет чрезвычайно плохой. Фиг.19 иллюстрирует пример назначения пользователю 2 и пользователю 3 средней полосы передачи.
Более того, как показано на Фиг.20 и 21, возможно выполнять управление (скачкообразное управление) так, чтобы полоса передачи, назначенная пользователям, менялась для каждого кадра. Фиг.20 представляет собой схему, иллюстрирующую назначение для нечетного кадра, а Фиг.21 представляет собой схему, иллюстрирующую назначение для четного кадра.
Как показано на Фиг.20, для нечетного кадра, поднесущие 1~12 и 37~48 на обоих концах назначаются пользователю 1 и пользователю 4, а средние поднесущие 13~24 и 25~36 назначаются пользователю 2 и пользователю 3. Кроме того, как показано на Фиг.21, для четного кадра, средние поднесущие 13~24 и 25~36 назначаются пользователю 4 и пользователю 1, а поднесущие 1~12 и 37~48 на обоих концах назначаются пользователю 3 и пользователю 2. Частотное смещение применяется к пилот-сигналам пользователя 3 и пользователя 4 для нечетного кадра, и частотное смещение применяется к пилот-сигналам пользователя 1 и пользователя 2 для четного кадра. Таким образом, исключается ситуация, когда есть пользователи, для которых точность оценки канала будет чрезвычайно плохой.
Фиг.22 представляет собой чертеж, иллюстрирующий структуру блока генерации пилот-сигнала, когда выполняется скачкообразное управление, причем одинаковые ссылочные номера на этой фигуре обозначают одинаковые элементы блока генерации пилот-сигнала, показанного в части (A) с Фиг.14. Этот блок генерации пилот-сигнала отличает только тем, что был добавлен блок 71 управления переключением частотного смещения; остальные операции те же.
Блок 11 генерации CAZAC-последовательности генерирует CAZAC-последовательность ZCk(n) с заданной длиной L последовательности и номером k последовательности в качестве пилот-сигнала, и блок 12 циклического сдвига выполняет циклический сдвиг CAZAC-последовательности ZCk(n) на заданную величину в c выборок и вводит полученную последовательность ZCk(n-c) в блок 13 DFT. Блок 13 DFT с размерностью NTX (NTX=L) выполняет DFT-обработку введенного пилот-сигнала ZCk(n-c), чтобы сгенерировать пилот-сигнал DFT{ZCk(n-c)} частотной области. Блок 71 управления переключением частотного смещения определяет, необходимо ли выполнять частотное смещение на основании величины частотного смещения d и шаблона скачкообразной смены, заданного из блока 23 управления ресурсами передачи. Блок 14 отображения поднесущей выполняет отображение поднесущей в зависимости от того, выполняется ли частотное смещение. Блок 15 IFFT с размерностью NFFT (например, NFFT=128) выполняет IFFT-обработку введенных компонентов поднесущей, чтобы преобразовать сигнал в пилот-сигнал временной области, и вводит результат в блок 26 генерации кадра.
Полезный эффект изобретения
Посредством описанного выше изобретения предоставляется возможность выполнять оценку канала поднесущих передачи данных, который отличается от частотной полосы передачи пилот-сигнала, с высокой точностью.
В добавление, посредством настоящего изобретения предоставляется возможность выполнения оценки канала поднесущих передачи данных, которые назначаются пользователям, даже когда выполняется циклический сдвиг разной величины на заданной последовательности (например, CAZAC-последовательности ZCk(n)), используемой как пилот-сигнал для пользователей, который будет мультиплексирован.
Более того, посредством настоящего изобретения предоставляется возможность выполнения оценки канала путем отделения пилот-сигналов каждого пользователя простым способом, даже когда выполняется циклический сдвиг разной величины на заданной последовательности, используемой в качестве пилот-сигнала для пользователей, который будут мультиплексирован.
Сверх того, посредством настоящего изобретения, путем назначения средней части полосы передачи пилот-сигналов пользователям с плохим состоянием тракта распространения, предоставляется возможность улучшения точности оценки канала поднесущих передачи данных, даже при плохом состоянии тракта распространения этого пользователя.
Также, посредством настоящего изобретения, путем выполнения скачкообразной смены полос передачи данных, назначенных пользователям, между средней частью и конечными частями полосы передачи пилот-сигнала, предоставляется возможность улучшить точность оценки канала поднесущих передачи данных, даже при плохом состоянии тракта распространения этого пользователя.


















Изобретение относится к технике связи и может использоваться в системах мобильной связи. Технический результат состоит в повышении пропускной способности. Для этого в системе радиосвязи каждый пользовательский терминал вместе с передачей сигнала данных в базовую станцию, используя разные частоты полосы передачи данных, которые назначаются базовой станцией, выполняет мультиплексирование пилот-сигнала с сигналом данных по схеме мультиплексирования с временным разделением и передает результирующий сигнал в базовую станцию. Блок управления ресурсами базовой станции определяет полосы передачи пилот-сигнала для каждого пользовательского терминала таким образом, чтобы полоса передачи пилот-сигнала охватывала полосу передачи данных для этого пользовательского терминала с частотным смещением, и подает команду пользовательскому терминалу передать пилот-сигнал, используя частоты упомянутой определенной полосы передачи пилот-сигнала. Таким образом базовая станция может оценить канал для каждой частоты полосы передачи данных, используя пилот-сигнал. 28 ил., 1 табл.
Пользовательский терминал в системе радиосвязи, в которой каждый из пользовательских терминалов выполняет мультиплексирование сигнала данных и пилот-сигнала и передает мультиплексированный сигнал в базовую станцию, используя разные частоты полосы передачи данных, которые назначаются базовой станцией, причем пользовательский терминал содержит: принимающий блок, который принимает информацию ресурсов восходящей линии связи от базовой станции; и блок генерации пилот-сигнала, который генерирует пилот-сигнал на основании информации ресурсов восходящей линии связи; и передающий блок, который передает пилот-сигнал, генерируемый блоком генерации пилот-сигнала, в базовую станцию; при этом блок генерации пилот-сигнала содержит: блок генерации последовательности, который генерирует последовательность Задоффа-Чу в качестве пилот-сигнала на основании информации ресурсов восходящей линии связи; блок отображения поднесущей, который выполняет отображение последовательности, генерируемой посредством циклического копирования последовательности Задоффа-Чу.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ И УСТРОЙСТВО КАНАЛЬНОЙ СВЯЗИ ДЛЯ СИСТЕМЫ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2214684C2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

