Область техники, к которой относится изобретение
Изобретение относится к системе обработки изображений, которая поддерживает захват изображения глаза, и, более конкретно, к системе обработки изображений, использующей томограммы глаза.
Уровень техники изобретения
С целью проведения ранней диагностики различных болезней, занимающих первые места среди причин болезней взрослых людей и слепоты, широко проводятся обследования глаз. При обследованиях и т.п. требуется выявление болезней глаза во всей полноте. Поэтому существенно важными являются обследования, использующие изображения широкой области глаза (здесь далее называемые широкими изображениями). Широкие изображения получаются, используя, например, устройство для фотографирования сетчатки или сканирующий лазерный офтальмоскоп (SLO). Напротив, устройства для захвата томограммы глаза, такие как оптическое когерентное томографическое (OCT) устройство, могут наблюдать трехмерное состояние внутренней части слоев сетчатки и поэтому ожидается, что эти устройства для захвата томограммы глаза будут полезны при точном проведении диагностики болезней. Здесь далее изображение, захваченное с помощью устройства ОСТ, будет упоминаться как томограмма или объемные данные томограммы.
Когда изображение глаза должно быть захвачено с использованием устройства ОСТ, от начала захвата изображения до окончания захвата изображения должно пройти некоторое время. В течение этого времени исследуемый глаз (здесь далее будет упоминаться как глаз субъекта) может внезапно передвинуться или мигнуть, приводя в результате к смещению или искажению изображения. Однако такое смещение или искажение в изображении не может быть распознано во время захвата изображения. Кроме того, такое смещение или искажение можно пропустить при проверке полученных данных изображения после того, как завершается захват изображения, из-за огромного объема данных изображения. Так как эта операция проверки является непростой, работа врача по диагностике является неэффективной.
Чтобы преодолеть описанные выше проблемы, раскрываются способ обнаружения мигания при захвате изображения (японский выложенный патент № 62-281923) и способ коррекции сдвига положения в томограмме из-за движения глаза субъекта (японский выложенный патент № 2007-130403).
Однако известные способы обладают следующими проблемами.
В способе, описанном в упомянутом выше японском выложенном патентном документе № 62-281923, мигание обнаруживается, используя устройство определения открывания/закрывания века. Когда уровень века изменяется с закрытого уровня на открытый уровень, изображение получают после того, как истечет заданное время, установленное посредством устройства установления времени задержки. Поэтому, хотя мигание может быть обнаружено, смещение или искажение изображения из-за движения глаза субъекта не может быть обнаружено. Таким образом, состояние захвата изображения, содержащего движение глаза субъекта, не может быть получено.
Кроме того, способ, описанный в японском выложенном патентном документе № 2007-130403, выполняется, чтобы совместить две или более томограмм, используя опорное изображение (одна томограмма, ортогональная к двум или более томограммам, или изображению глазного дна). Поэтому, при значительном движении глаза, томограммы корректируются, но никакое точное изображение создано быть не может. Кроме того, не существует концепции определения состояния захвата изображения, являющегося состоянием глаза субъекта во время захвата изображения.
Список патентной литературы
PTL 1: Японский выложенный патентный документ № 62-281923.
PTL 2: Японский выложенный патентный документ № 2007-130403.
Сущность изобретения
Настоящее изобретение обеспечивает систему обработки изображений, которая определяет точность томограммы.
В соответствии с вариантом настоящего изобретения обеспечивается устройство обработки изображений для определения состояния захвата изображения глаза субъекта, содержащее блок обработки изображений, выполненный с возможностью получения информации, указывающей на непрерывность томограмм глаза субъекта; и блок определения, выполненный с возможностью определения состояния глаза субъекта при захвате изображения на основе информации, полученной блоком обработки изображений.
В соответствии с другим аспектом настоящего изобретения обеспечивается способ обработки изображений для определения состояния захвата изображения глаза субъекта, содержащий этапы, на которых обрабатывают изображение для получения информации, указывающей непрерывность томограмм глаза субъекта; и определяют состояние захвата изображения глаза субъекта на основе информации, полученной на этапе обработки изображений.
Другие признаки и преимущества настоящего изобретения будут очевидны из последующего описания, рассматриваемого совместно с сопроводительными чертежами, на которых схожие ссылочные позиции обозначают одни и те же или подобные части на всех чертежах.
Краткое описание чертежей
Сопроводительные чертежи, содержащиеся в описании и составляющие его часть, поясняют варианты осуществления изобретения и вместе с описанием служат для объяснения принципа изобретения.
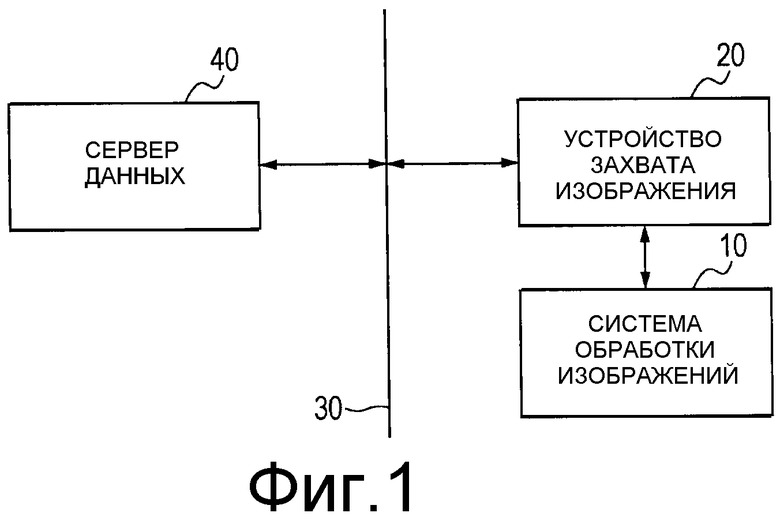
Фиг.1 - блок-схема структуры устройств, подключенных к системе 10 обработки изображений.
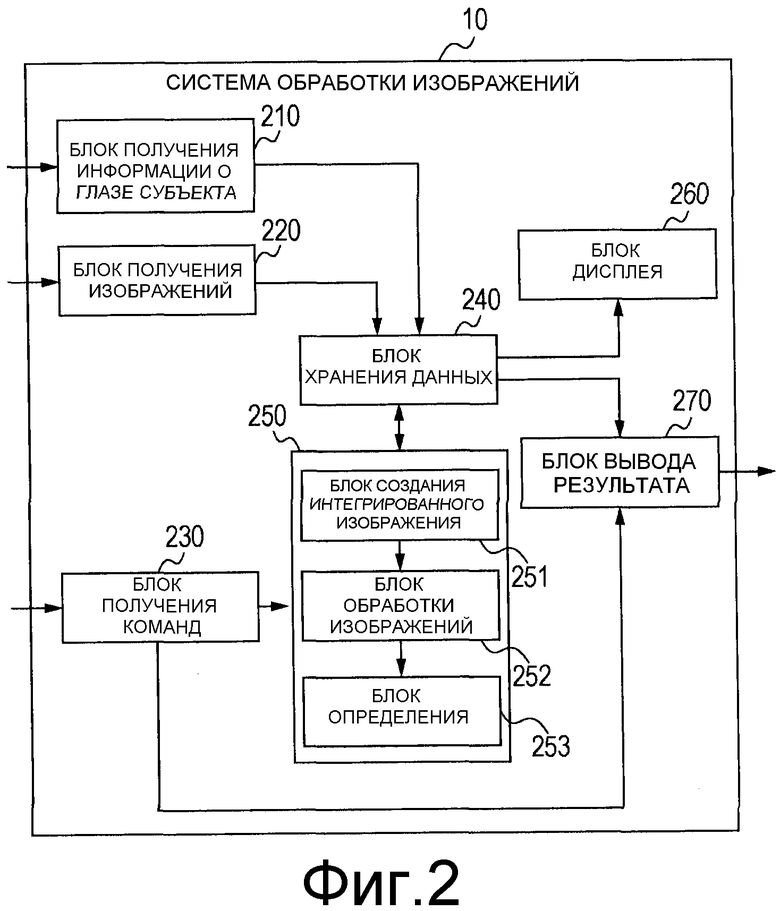
Фиг.2 - блок-схема функциональной структуры системы 10 обработки изображений.
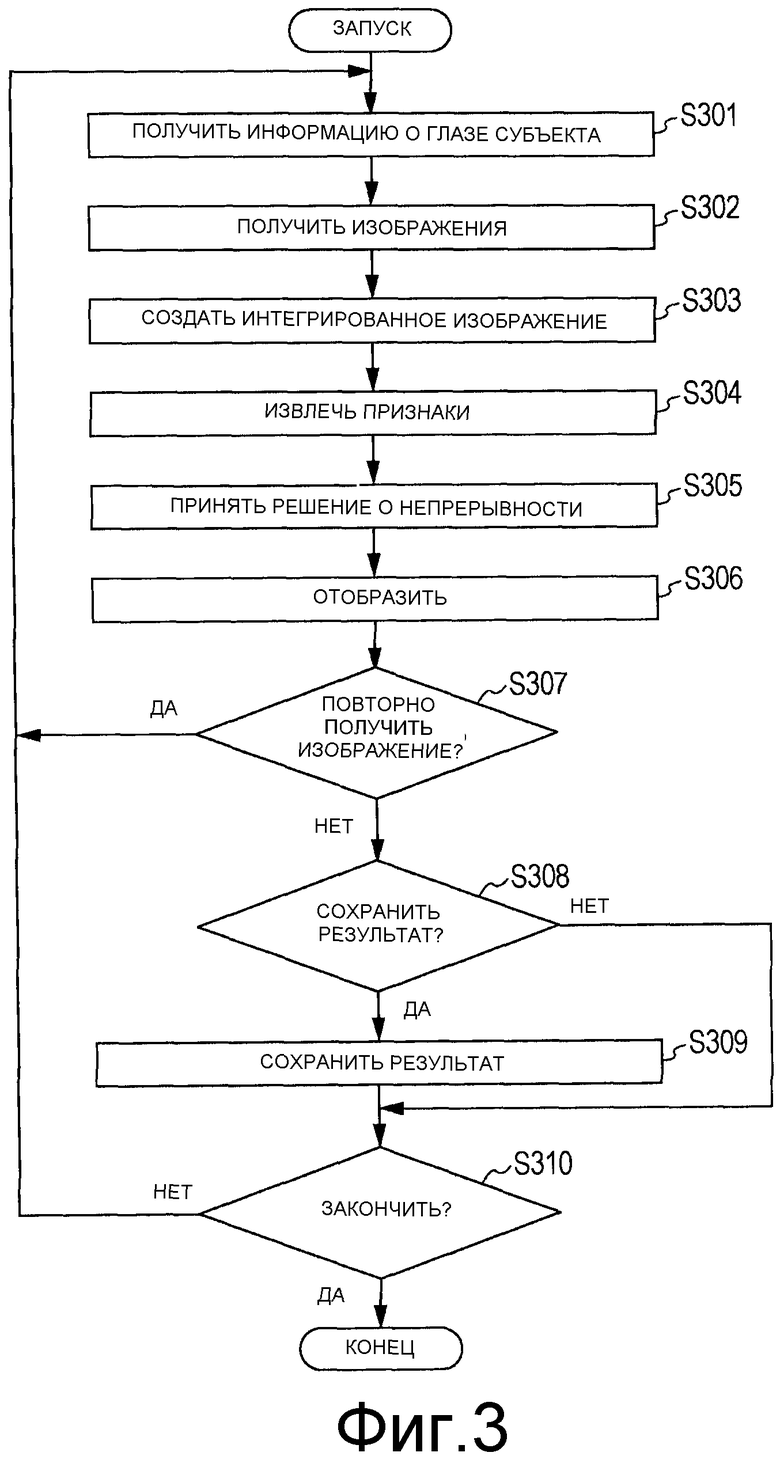
Фиг.3 - блок-схема последовательности выполнения операций процесса, выполняемого системой 10 обработки изображений.
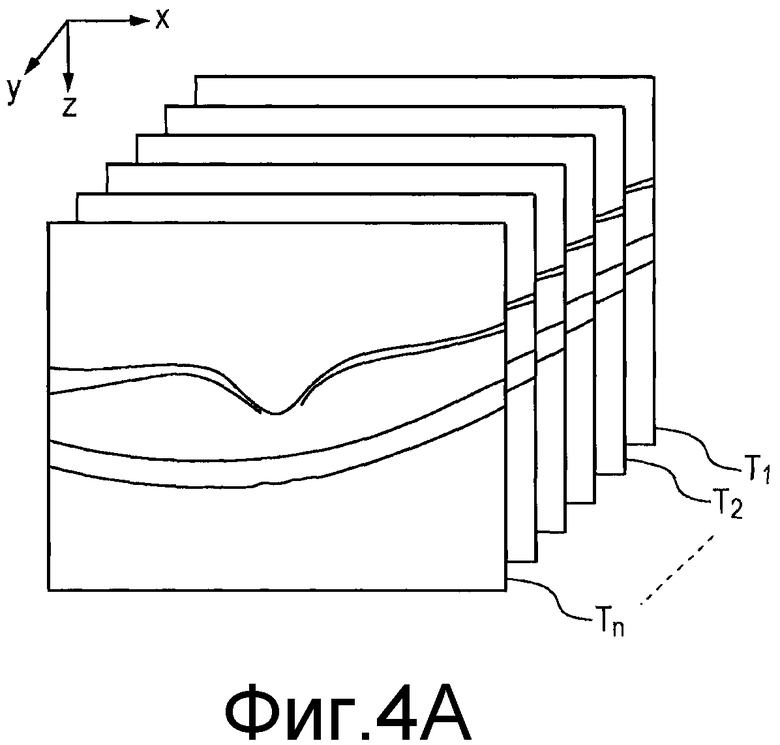
Фиг.4A - пример томограмм.
Фиг.4B - пример интегрированного изображения.
Фиг.5A - пример интегрированного изображения.
Фиг.5B - пример интегрированного изображения.
Фиг.6 - пример отображения на экране.
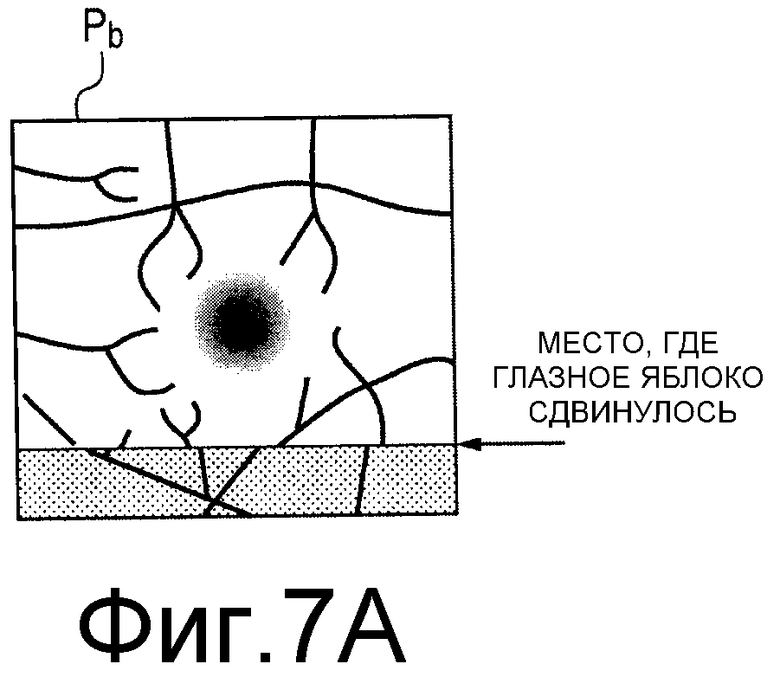
Фиг.7A - состояние захвата изображения.
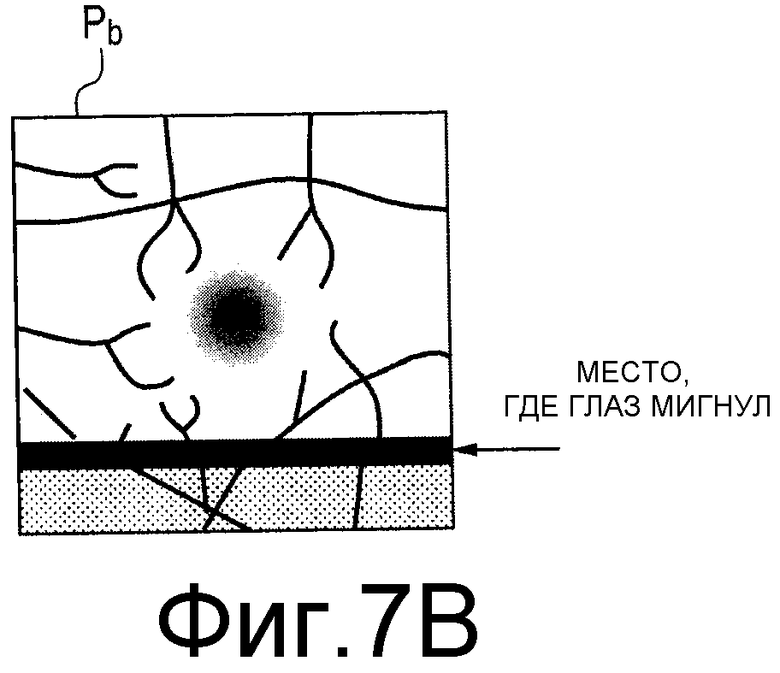
Фиг.7B - состояние захвата изображения.
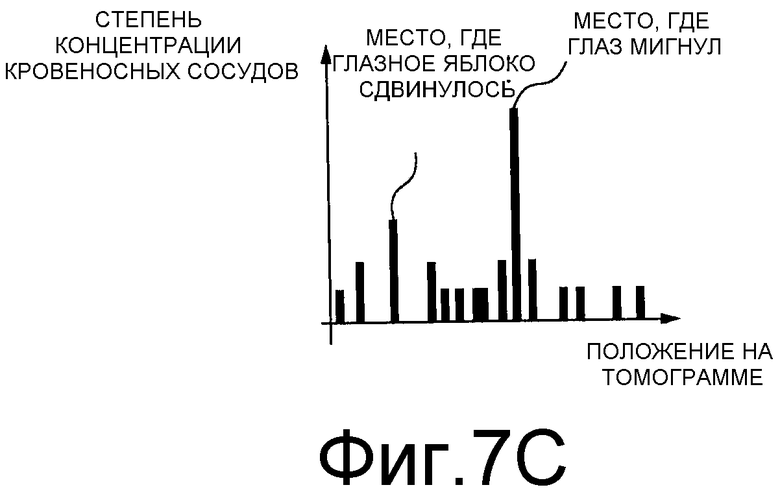
Фиг.7C - отношение между состоянием захвата изображения и степенью концентрации кровеносных сосудов.
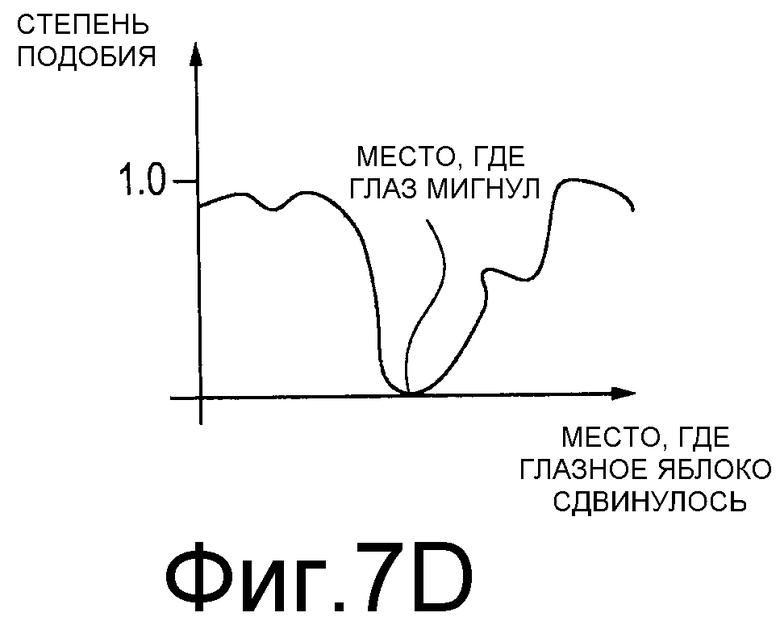
Фиг.7D - отношение между состоянием захвата изображения и степенью похожести.
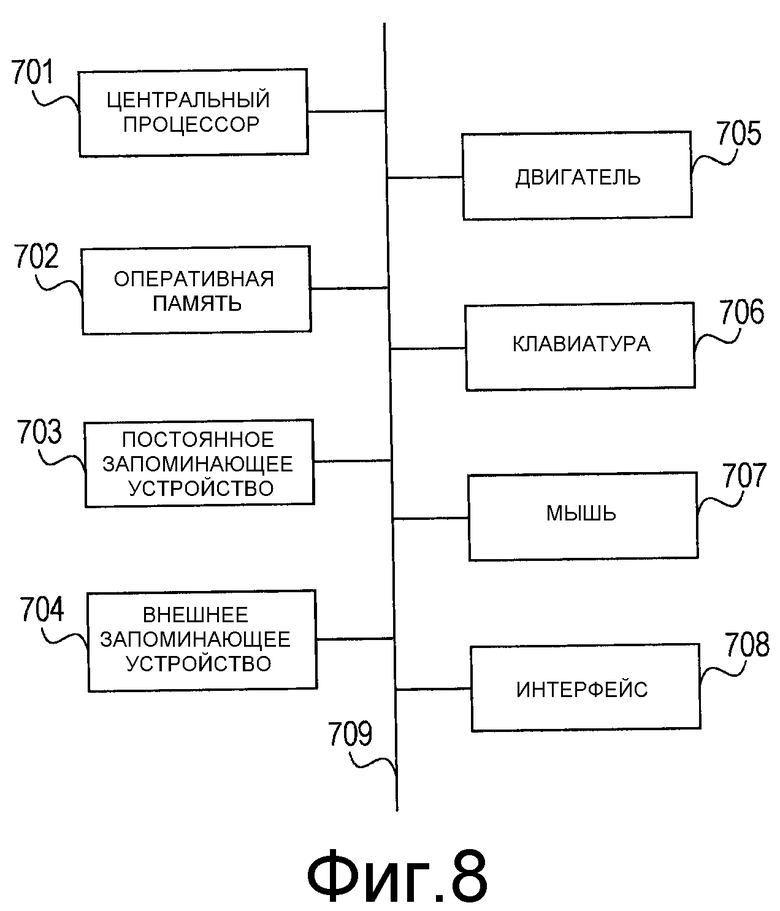
Фиг.8 - блок-схема базовой структуры системы 10 обработки изображений.
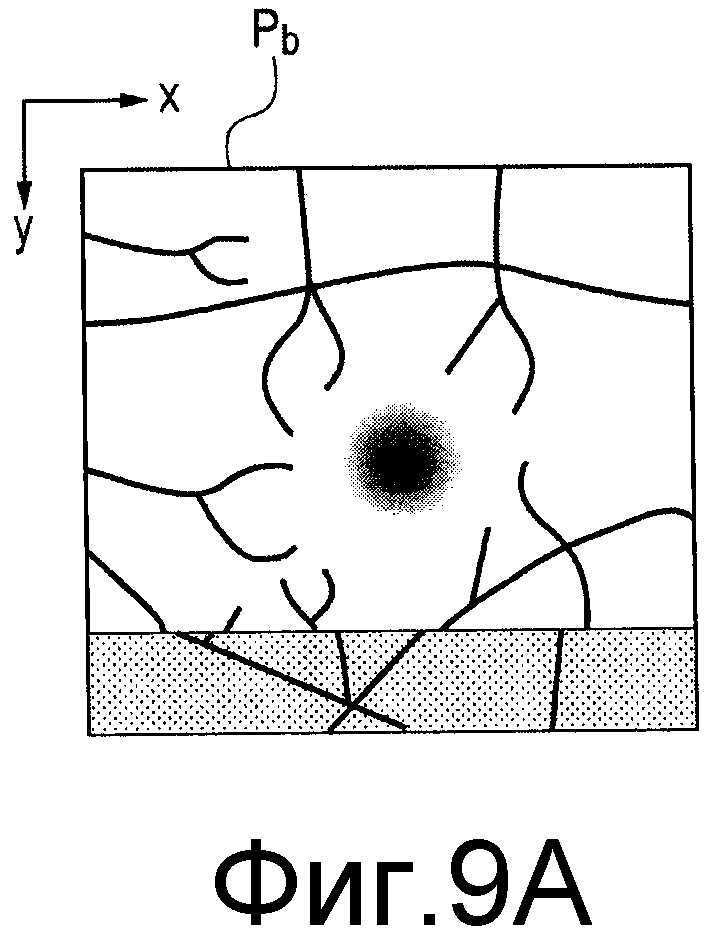
Фиг.9A - пример интегрированного изображения.
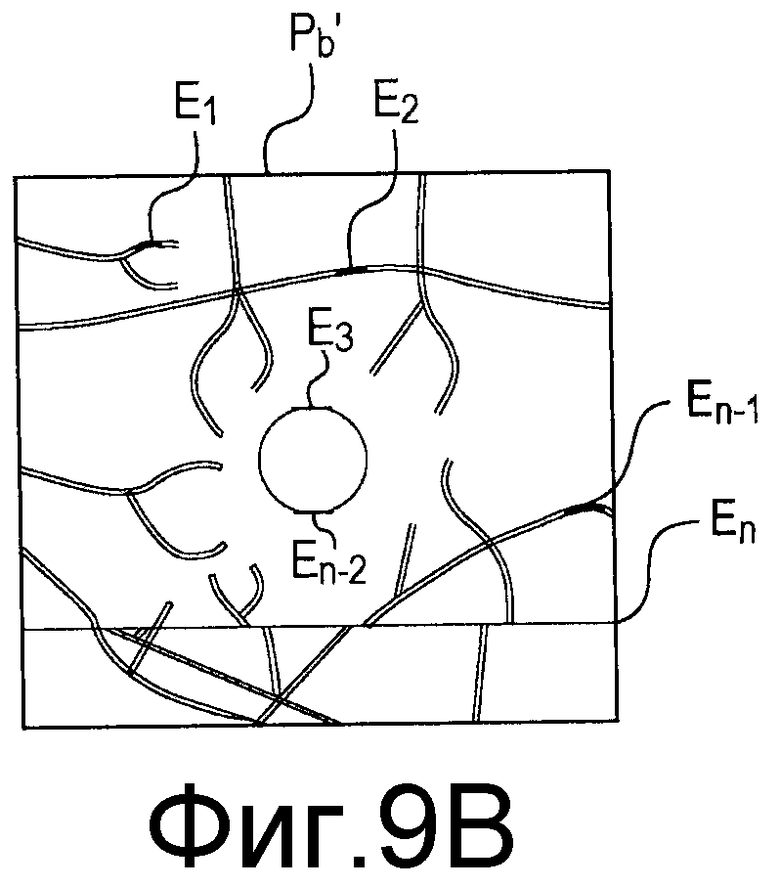
Фиг.9B - пример градиентного изображения.
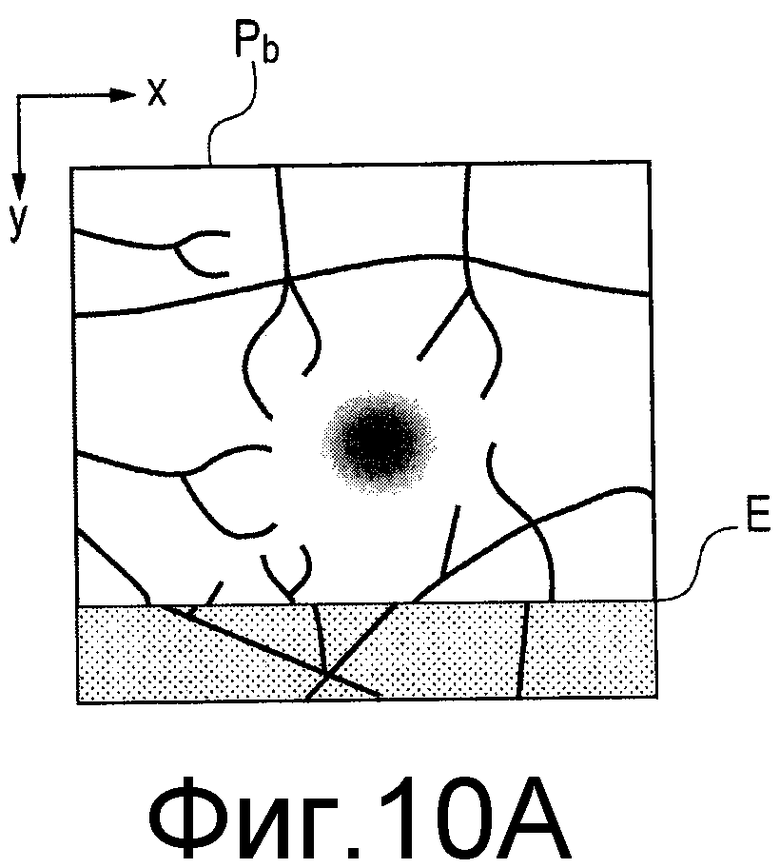
Фиг.10A - пример интегрированного изображения.
Фиг.10B - пример спектра мощности.
Фиг.11 - блок-схема последовательности выполнения операций процесса.
Фиг.12A - пример описания признаков томограммы.
Фиг.12B - пример описания признаков томограммы.
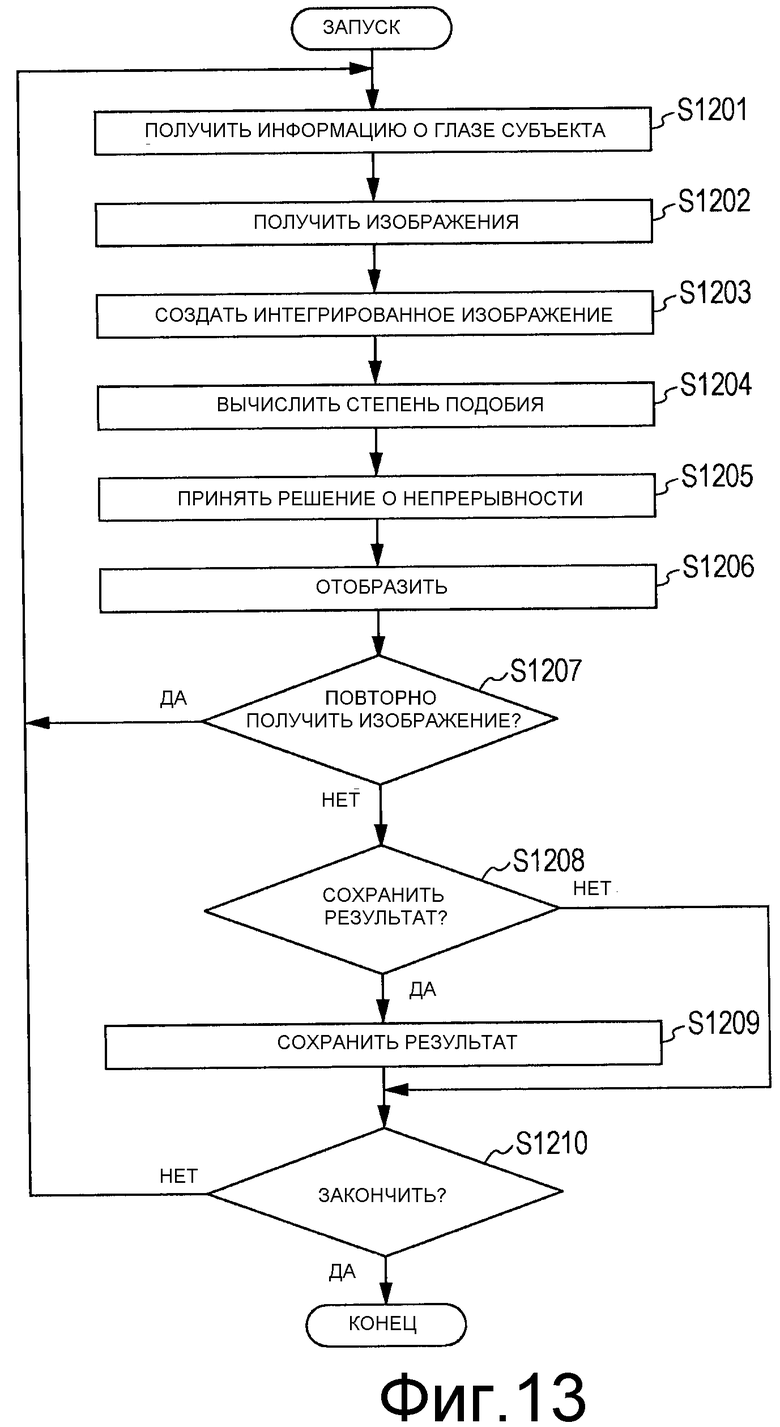
Фиг.13 - блок-схема последовательности выполнения операций процесса.
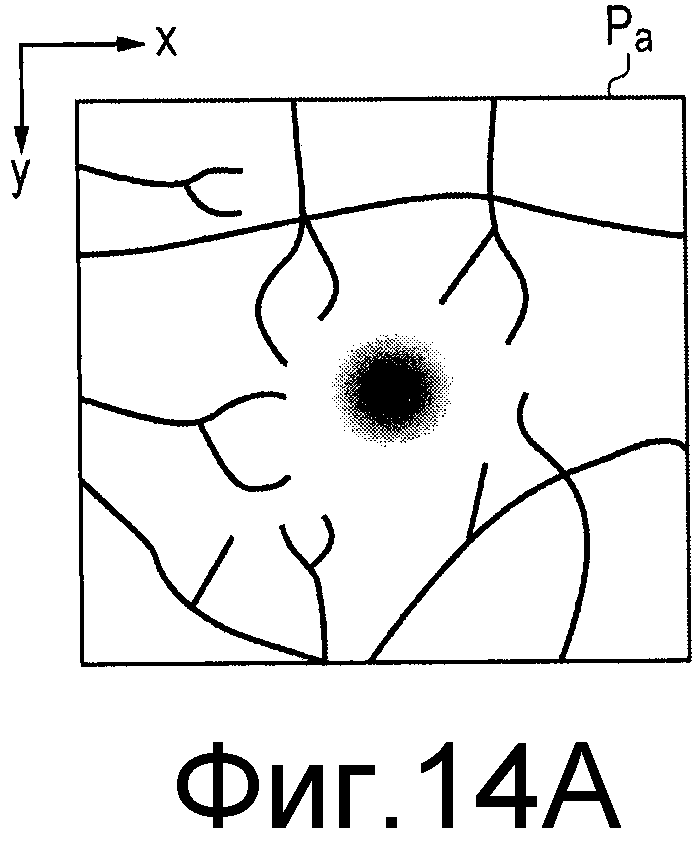
Фиг.14A - пример интегрированного изображения.
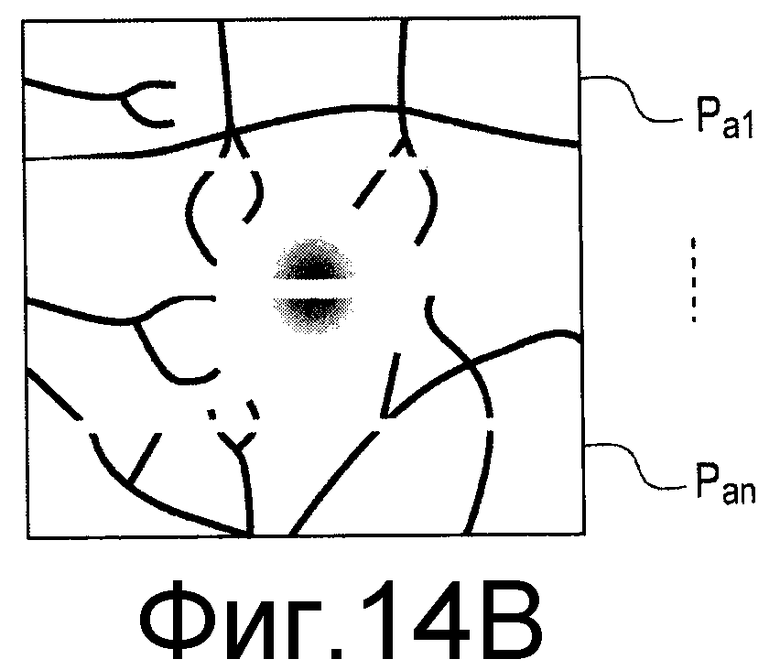
Фиг.14B - пример частичных изображений.
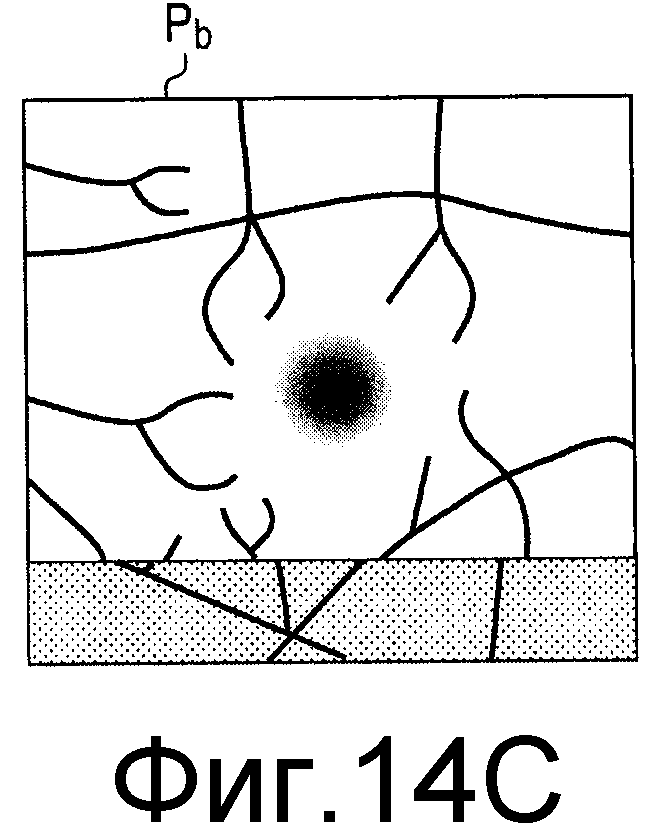
Фиг.14C - пример интегрированного изображения.
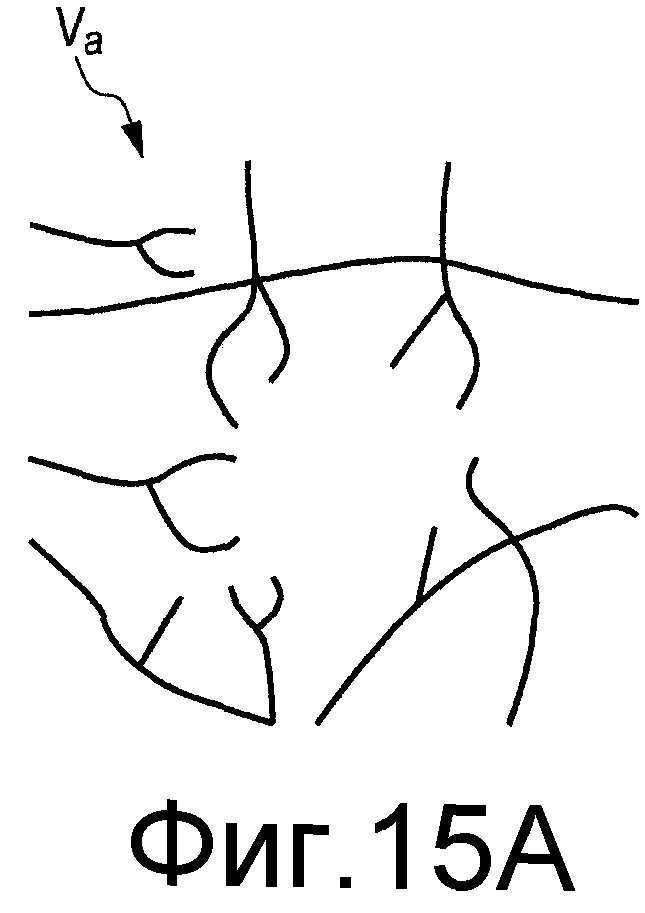
Фиг.15A - пример модели кровеносных сосудов.
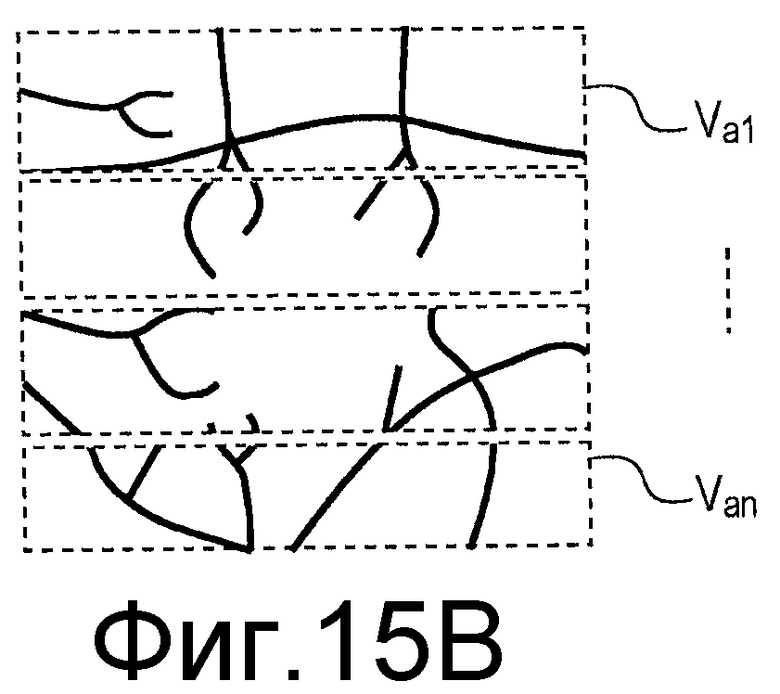
Фиг.15B - пример частичных моделей.
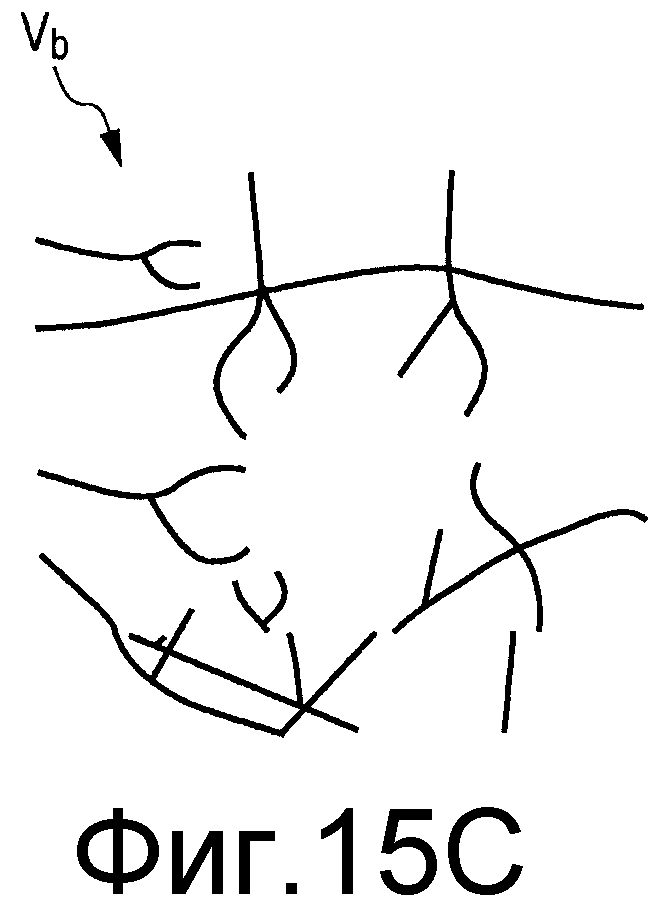
Фиг.15C - пример модели кровеносных сосудов.
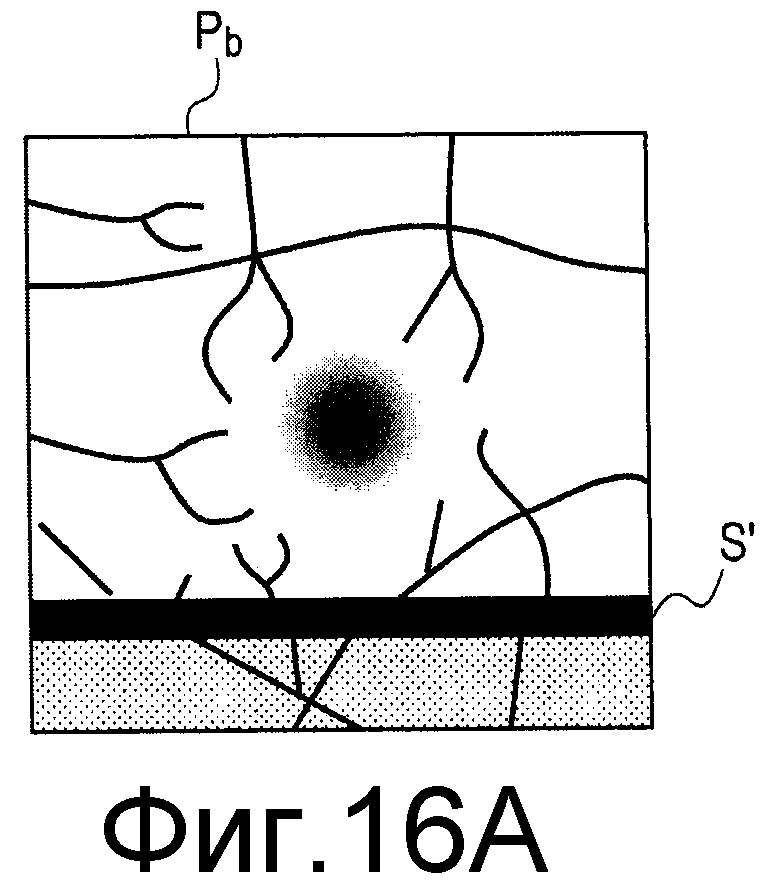
Фиг.16A - пример отображения на экране.
Фиг.16B - пример отображения на экране.
Фиг.16C - пример отображения на экране.
Описание вариантов осуществления
Предпочтительные варианты осуществления настоящего изобретения теперь будут описаны подробно в соответствии с сопроводительными чертежами. Однако объем настоящего изобретения не ограничивается примерами, представленными на чертежах.
Первый вариант осуществления
Устройство обработки изображений, соответствующее настоящему варианту осуществления, создает интегрированное изображение из томографических объемных данных, когда получены томограммы глаза субъекта (глаза, служащего целью обследования), и определяет точность захваченных изображений, используя непрерывность признаков изображения, полученных из интегрированного изображения.
На фиг.1 представлена блок-схема устройств, присоединенных к системе 10 обработки изображений в соответствии с настоящим вариантом осуществления. Как показано на фиг.1, система 10 обработки изображений соединяется с устройством 20 захвата томограмм и сервером 40 данных через локальную сеть (LAN) 30, такую как Ethernet (зарегистрированная торговая марка). Соединение с этими устройствами может быть установлено, используя оптоволоконный кабель или интерфейс, такой как универсальная последовательная шина (USB) или шина Института инженеров по электротехнике (IEEE) 1394. Устройство 20 захвата томограмм соединяется с сервером 40 данных через LAN 30, такую как Ethernet (зарегистрированная торговая марка). Соединение с устройствами может быть установлено, используя внешнюю сеть, такую как Интернет.
Устройство 20 захвата томограмм является устройством, получающим томограмму глаза. Устройством 20 захвата томограмм является, например, устройство ОСТ, использующее ОСТ во временной области или ОСТ в частотной области. В ответ на операцию, введенную оператором (не показан), устройство 20 захвата томограмм получает трехмерную томограмму глаза субъекта (не показан). Устройство 20 захвата томограмм передает полученную томограмму в систему 10 обработки изображений.
Сервер 40 данных является сервером, на котором хранится томограмма глаза субъекта и информация, полученная для глаза субъекта. Сервер 40 данных хранит томограмму глаза субъекта, которая поступает с выхода устройства 20 захвата томограмм, и результат, поступающий с выхода системы 10 обработки изображений. В ответ на запрос от системы 10 обработки изображений, сервер 40 данных передает прежние данные о глазе субъекта в систему 10 обработки изображений.
Функциональная структура системы 10 обработки изображений, соответствующая настоящему варианту осуществления, будет описана со ссылкой на фиг.2. На фиг.2 представлена функциональная блок-схема системы 10 обработки изображений. Как показано на фиг.2, система 10 обработки изображений содержит блок 210 получения информации о глазе субъекта, блок 220 получения изображения, блок 230 получения команды, блок 240 хранения данных, устройство 250 обработки изображений, блок 260 дисплея и блок 270 вывода результата.
Блок 210 получения информации о глазе субъекта получает извне информацию для идентификации глаза субъекта. Информацией для идентификации глаза субъекта является, например, идентификационный номер субъекта, присвоенный глазу каждого субъекта. Альтернативно, информация для идентификации глаза субъекта может содержать комбинацию идентификационного номера субъекта и идентификатора, представляющего, является ли цель обследования правым глазом или левым глазом.
Информация идентификации глаза субъекта вводится оператором. Когда сервер 40 данных содержит информацию идентификации глаза субъекта, эта информация может быть получена от сервера 40 данных.
Блок 220 получения изображения получает томограмму, переданную от устройства 20 захвата томограммы. В последующем описании предполагается, что томограммой, полученной блоком 220 получения изображения, является томограмма глаза субъекта, идентифицированного блоком 210 получения информации о глазе субъекта. Также предполагается, что различные параметры, касающиеся захвата томограммы, присоединяются к томограмме как информация.
Блок 230 получения команды получает команду на выполнение процесса, введенную оператором. Например, блок 230 получения команды получает команду, чтобы запустить, прервать, закончить или возобновить процесс захвата изображения, команду сохранить или не сохранить захваченное изображение, и команду для указания места сохранения. Подробности команды, полученной блоком 230 получения команды, отправляются на устройство 250 обработки изображений и устройство 270 вывода результата по мере необходимости.
Блок 240 хранения данных временно хранит информацию, касающуюся глаза субъекта, которую получает блок 210 получения информации о глазе субъекта. Кроме того, блок 240 хранения данных временно хранит томограмму глаза субъекта, полученную блоком 220 получения изображения. Дополнительно, блок 240 хранения данных временно хранит информацию, получаемую из томограммы, получаемой устройством 250 обработки изображений, как будет описано позже. Эти позиции данных отправляются на устройство 250 обработки изображений, блок 260 дисплея и блок 270 вывода результата по мере необходимости.
Устройство 250 обработки изображений получает томограмму, хранящуюся в блоке 240 хранения данных, и выполняет процесс на томограмме, чтобы определить непрерывность объемных данных томограммы. Устройство 250 обработки изображений содержит блок 251 создания интегрированного изображения, блок 252 обработки изображений и блок 253 определения.
Блок 251 создания интегрированного изображения создает интегрированное изображение, интегрируя томограммы в направлении глубины. Блок 251 создания интегрированного изображения выполняет процесс интегрирования в направлении глубины для n двумерных томограмм, захваченных устройством 20 захвата томограмм. Здесь, двумерные томограммы будут упоминаться как изображения в поперечном сечении. Изображения в поперечном сечении содержат, например, изображения B-сканирования и изображения A-сканирования. Конкретные подробности процесса, выполняемого блоком 251 создания интегрированного изображения, позже будут описаны подробно.
Блок 252 обработки изображений извлекает из томограмм информацию для определения трехмерной непрерывности. Конкретные подробности процесса, выполняемого блоком 252 обработки изображений, позже будут описаны подробно.
Блок 253 определения определяет непрерывность объемных данных томограммы (в дальнейшем, они могут также упоминаться как томограммы) на основе информации, извлеченной блоком 252 обработки изображений. Когда блок 253 определения определяет, что позиции объемных данных томограммы терпят разрыв, блок 260 дисплея отображает результат определения. Конкретные подробности процесса, выполняемого блоком 253 определения, позже будут описаны подробно. На основе информации, извлеченной блоком 252 обработки изображений, блок 253 определения определяет, насколько двигался глаз субъекта или мигал ли глаз субъекта.
Блок 260 дисплея отображает на мониторе томограммы, полученные блоком 220 получения изображения, и результат, полученный посредством обработки томограмм, используя для этого устройство 250 обработки изображений. Конкретные подробности, отображаемые на блоке 260 дисплея, позже будут описаны подробно.
Устройство 270 вывода результата связывает время и дату обследования, информацию идентификации глаза субъекта, томограмму глаза субъекта и результат анализа, полученный блоком 220 получения изображения, и посылает сопутствующую информацию в качестве информации, подлежащей сохранению, на сервер 40 данных.
На фиг.8 представлена схема, показывающая базовую структуру компьютера для реализации функций блоков системы 10 обработки изображений, используя программное обеспечение.
Центральный процессор (CPU) 701 управляет всем компьютером, используя программы, и хранит данные в оперативном запоминающем устройстве (RAM) 702 и/или постоянном запоминающем устройстве (ROM) 703. CPU 701 также управляет выполнением программного обеспечения, соответствующего блокам системы 10 обработки изображений, и осуществляет функции блоков. Заметим, что программы могут загружаться с носителя записи программы и сохраняться в RAM 702 и/или в ROM 703.
RAM 702 имеет область, в которой временно хранятся программы и данные, загруженные из внешнего запоминающего устройства 704, и рабочую область, необходимую для CPU 701, чтобы выполнять различные процессы. Функция блока 240 хранения данных реализуется посредством RAM 702.
В ROM 703 обычно хранится базовая система ввода-вывода (BIOS) и данные настройки компьютера. Внешнее запоминающее устройство 704 является устройством, которое функционирует как устройство хранения информации большой емкости, такое как жесткий диск, и хранит операционную систему и программы, выполняемые CPU 701. Информация, считающаяся известной в описании настоящего варианта осуществления, сохраняется в ROM 703 и загружается в RAM 702 по мере необходимости.
Монитор 705 является жидкокристаллическим дисплеем и т. п. Монитор 705 может отображать подробности, выводимые, например, блоком 260 дисплея.
Клавиатура 706 и мышь 707 является устройствами ввода данных. Оперируя этими устройствами, оператор может подавать различные команды на систему 10 обработки изображений. Функции блока 210 получения информации о глазе субъекта и блока 230 получения команд осуществляются через эти устройства ввода данных.
Интерфейс 708 выполнен с возможностью обмена различными позициями данных между системой 10 обработки изображений и внешним устройством. Интерфейсом 708 является, например, порт IEEE 1394, USB, или Ethernet (зарегистрированная торговая марка). Данные, полученные через интерфейс 708, загружаются в RAM 702. Функции блока 220 получения изображения 220 и блока 270 вывода результата осуществляются через интерфейс 708.
Описанные выше компоненты соединяются шиной 709.
Обращаясь теперь к блок-схеме последовательности выполнения операций, показанной на фиг.3, будет описан процесс, выполняемый системой 10 обработки изображений, соответствующей настоящему варианту осуществления. Функции блоков системы 10 обработки изображений в настоящем варианте осуществления осуществляются CPU 701, который выполняет программы, реализующие функции блоков, и управляет всем компьютером. Предполагается, что перед выполнением следующего процесса управляющая программа в соответствии с блок-схемой уже загружена, например, из внешнего запоминающего устройства 704 в RAM 702.
Этап S301
На этапе S301 блок 210 получения информации о глазе субъекта получает извне идентификационный номер субъекта в качестве информации для идентификации глаза субъекта. Эта информация вводится оператором, используя клавиатуру 706, мышь 707 или устройство считывания с перфокарт (не показано). На основе идентификационного номера субъекта блок 210 получения информации о глазе субъекта получает информацию, относящуюся к глазу субъекта, которая хранится сервером 40 данных. Эта информация, относящаяся к глазу субъекта, содержит, например, имя субъекта, возраст и пол. При наличии других позиций информации обследовании, в том числе, данные измерений, например, зрения, длины глазного яблока и внутриглазного давления, блок 210 получения информации о глазе субъекта может получить данные измерений. Блок 210 получения информации о глазе субъекта передает полученную информацию в блок 240 хранения данных.
Когда изображение того же самого глаза получают повторно, эта обработка на этапе S301 может быть пропущена. Когда имеется новая информация, которая должна быть добавлена, эта информация получается на этапе S301.
Этап S302
На этапе S302 блок 220 получения изображения получает томограммы, переданные от устройства 20 захвата томограмм. Блок 220 получения изображения передает полученную информацию в блок 240 хранения данных.
Этап S303
На этапе S303 блок 251 создания интегрального изображения создает интегрированное изображение, интегрируя изображения поперечного сечения (например, изображения B-сканирования) в направлении глубины.
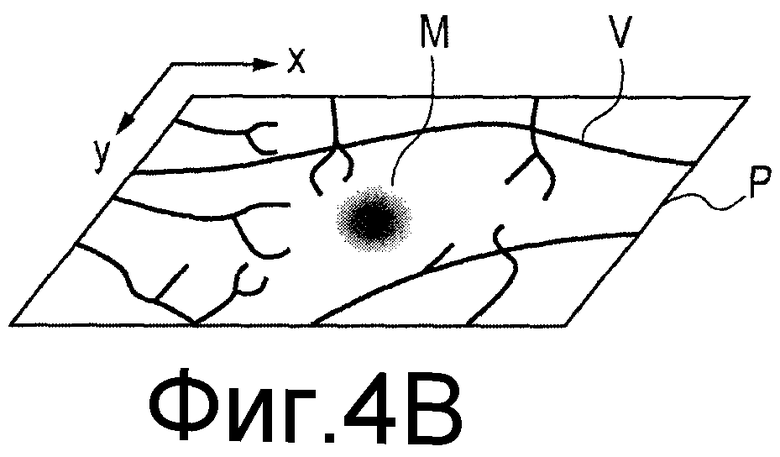
Здесь далее, процесс, выполняемый блоком 251 создания интегрированного изображения будет описан, используя фиг.4A и 4B. На фиг.4A представлены примеры томограмм, а на фиг.4B представлен пример интегрированного изображения. Конкретно, на фиг.4A показаны изображения T1-Tn в поперечном сечении пятна сетчатки и на фиг.4B показано интегрированное изображение P, созданное из изображений T1-Tn поперечного сечения. Направлением глубины является направление по оси z на фиг.4A. Интегрирование в направлении глубины является процессом добавления интенсивностей света (значений яркости) в позициях по глубине в направлении по оси z на фиг.4A. Интегрированное изображение P может основываться просто на сумме значений яркости в позициях по глубине или может основываться на среднем значении, полученном делением суммы на количество сложенных значений. Интегрированное изображение P не обязательно может быть создано сложением значений яркости всех пикселей в направлении глубины, оно может быть создано, складывая значения яркости пикселей в пределах произвольного диапазона. Например, целостность слоев сетчатки может быть определена заранее и могут складываться только значения яркости пикселей в слоях сетчатки. Альтернативно, могут складываться значения яркости пикселей только в произвольном слое из числа слоев сетчатки. Блок 251 создания интегрированного изображения выполняет этот процесс интегрирования в направлении глубины для n изображений T1-Тn в поперечном сечении, захваченных устройством 20 захвата томограмм, и создает интегрированное изображение P. Интегрированное изображение P, показанное на фиг.4B, представлено таким образом, что значения яркости увеличиваются, когда увеличивается интегрированное значение, и значения яркости уменьшаются, когда интегрированное значение уменьшается. Кривые V в интегрированном изображении P на фиг.4B представляют кровеносные сосуды, а окружность М в центре интегрированного изображения P представляет пятно сетчатки. Устройство 20 захвата томограмм получает изображения T1-Tn поперечного сечения глаза, принимая с помощью фотодетекторов отраженный свет, излучаемый источником света с низкой когерентностью. В местах, где имеются кровеносные сосуды, интенсивность отраженного света в позициях, более глубоких, чем кровеносные сосуды, имеет тенденцию ослабевать и значение, полученное интегрированием значений яркости в направлении по оси z, становится меньшим, чем полученное в местах, где кровеносные сосуды отсутствуют. Поэтому, создавая интегрированное изображение P, может быть захвачено изображение с контрастом между кровеносными сосудами и другими частями.
Этап S304
На этапе S304 блок 252 обработки изображений извлекает информацию для определения непрерывности объемных данных томограммы из интегрированного изображения.
Блок 252 обработки изображений обнаруживает кровеносные сосуды в интегрированном изображении как информацию для определения непрерывности объемных данных томограммы. Способ обнаружения кровеносных сосудов является общеизвестным способом, и подробное описание его будет опущено. Кровеносные сосуды могут обнаруживаться, не обязательно используя один способ, и могут быть обнаружены, используя комбинацию множества способов.
Этап S305
На этапе S305 блок 253 определения выполняет процесс на кровеносных сосудах, обнаруженных на этапе S304, и определяет непрерывность объемных данных томограммы.
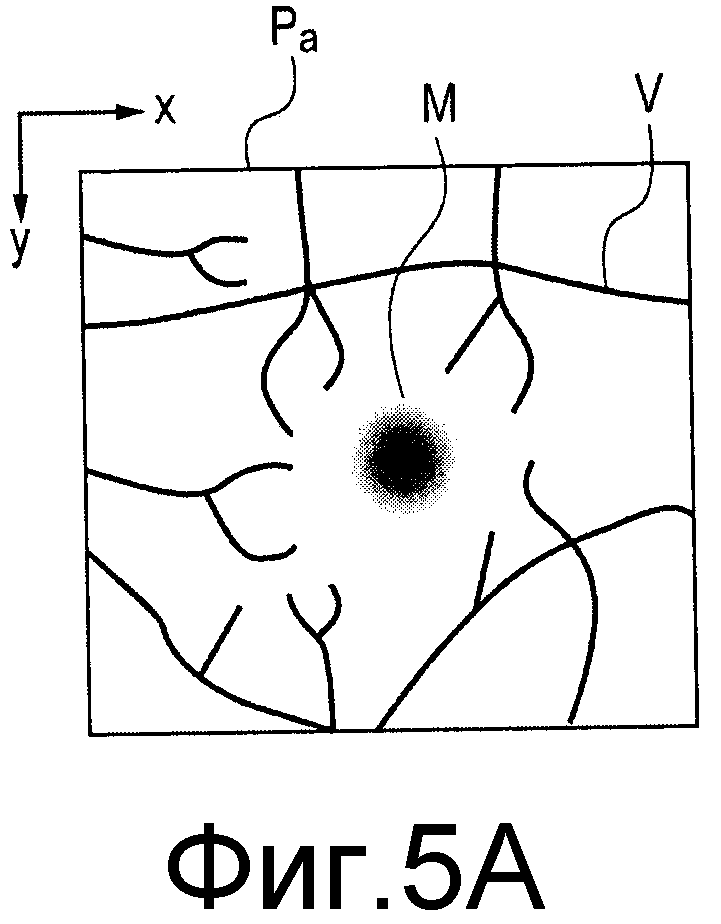
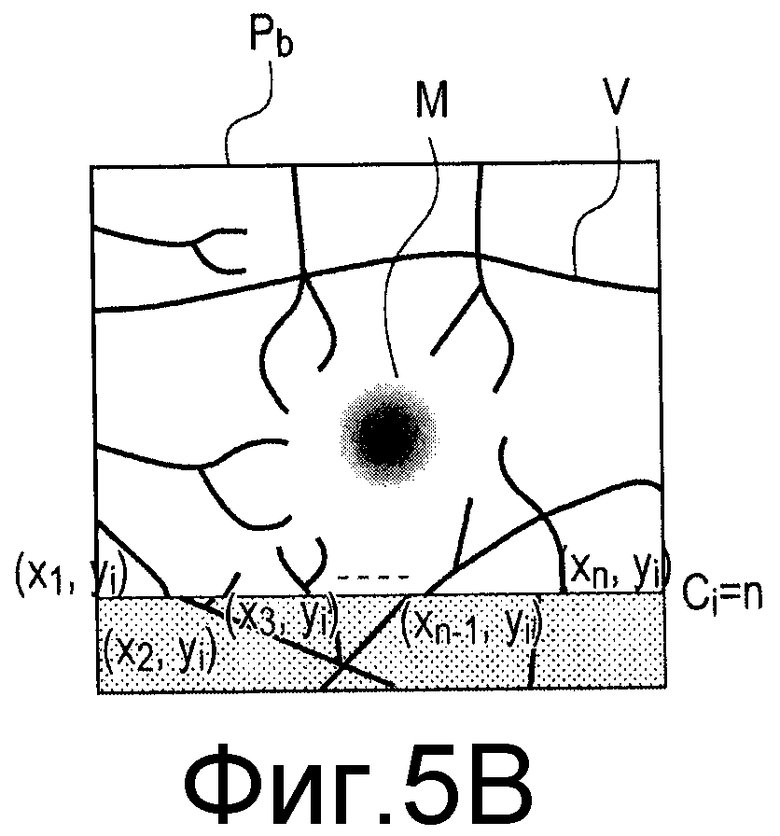
Здесь далее конкретный процесс, выполняемый блоком 253 определения, будет описан, используя фиг.5A и 5B. На фиг.5A и 5B показаны примеры интегрированного изображения. На фиг.5A показан пример интегрированного изображения Pa пятна сетчатки, когда захват изображения прошел успешно. На фиг.5B показан пример интегрированного изображения Рb пятна сетчатки, когда захват изображения прошел неудачно. На фиг.5A и 5B, направление сканирования во время захвата изображения с использованием ОСТ параллельно направлению оси х. Так как кровеносные сосуды глаза сконцентрированы на диске зрительного нерва и кровеносных сосудах, проходящих от диска зрительного нерва к пятну сетчатки, кровеносные сосуды концентрируются вблизи пятна сетчатки. Здесь далее концевая часть кровеносного сосуда будет упоминаться как конец кровеносного сосуда. Конец кровеносного сосуда в томограмме соответствует одному из двух случаев: В одном случае конец кровеносного сосуда в томограмме является концом кровеносного сосуда субъекта в полученном изображении. В другом случае было получено изображение глазного яблока субъекта, перемещавшегося во время захвата изображения. В результате, захваченное изображение кровеносного сосуда становится поврежденным и в полученном изображении он воспринимается как конец кровеносного сосуда.
Блок 252 обработки изображений следует по траектории от кровеносных сосудов, которые концентрируются около пятна сетчатки, индивидуальных кровеносных сосудов, и помечает прослеженные кровеносные сосуды как "прослеженные". Блок 252 обработки изображений хранит в блоке 240 хранения данных координаты положений концов прослеженных кровеносных сосудов как информацию о положении. Блок 252 обработки изображений одновременно подсчитывает координаты положений концов кровеносных сосудов, существующих на линии, параллельной направлению сканирования во время захвата изображения с использованием ОСТ (направление по оси х). Таким образом представляется количество концов кровеносных сосудов в томограммах. Например, блок 252 обработки изображений подсчитывает одновременно точки (x1, yi), (x2, yi), (x3, yi)... (xn-1, yi), (xn, yi), существующие с одной и той же y-координатой. Когда захват изображения с использованием ОСТ был успешным, как на фиг.5A, маловероятно, что координаты концов кровеносных сосудов на линии, параллельной линии направлению сканирования во время захвата изображения с использованием OCT, будут сконцентрированы. Однако когда захват изображения с использованием OCT было неудачным, как на фиг.5B, между изображениями поперечного сечения (изображениями B-сканирования) происходит смещение положения и, следовательно, концы кровеносных сосудов концентрируются на линии на границе, на которой произошло смещение положения. Поэтому, когда координаты многочисленных концов кровеносных сосудов существуют на линии, параллельной направлению сканирования во время захвата изображения с использованием OCT (направление по оси Х), очень вероятно, что захват изображения прошел неудачно. Блок 253 определения определяет, был ли захват изображения неудачным, основываясь на пороге Th степени концентрации концов кровеносных сосудов. Например, блок 253 определения производит определение на основе следующего уравнения (1). В уравнении (1) Cy обозначает степень концентрации концов кровеносного сосуда, нижний индекс обозначает y-координату, и Y обозначает размер изображения. Когда степень концентрации концов кровеносных сосудов больше или равна порогу Th, блок 253 определения определяет, что изображения поперечных сечений терпят разрыв. То есть, когда количество концов кровеносных сосудов в изображениях поперечных сечений больше или равно порогу Th, блок 253 определения определяет, что изображения поперечных сечений терпят разрыв.
Поэтому порог Th может быть фиксированным порогом в виде числа или отношением количества координат концов кровеносных сосудов на линии к количеству координат всех концов кровеносных сосудов. Альтернативно, порог Th может быть установлен на основе статистических данных или информации о субъекте (возраст, пол и/или раса). Степень концентрации концов кровеносных сосудов не ограничивается теми, которые получены, используя концы кровеносных сосудов, существующих на линии. Учитывая вариации обнаружения кровеносных сосудов, определение может быть сделано, используя координаты концов кровеносных сосудов на двух или более последовательных линиях. Когда конец кровеносного сосуда располагается на краю изображения, можно считать, что этот кровеносный сосуд продолжается за пределами изображения и координатная точка этого конца кровеносного сосуда может быть исключена из подсчета. Здесь тот факт, что конец кровеносного сосуда располагается на границе изображения, означает, что в случае, когда размер изображения (X, Y), координаты конца кровеносного сосуда равны (0, yj), (X-1, yj), (xj, 0), или (xj, Y-1). В этом случае, тот факт, что конец кровеносного сосуда расположен на границе изображения, не ограничивается его нахождением на границе изображения; может иметься поле из нескольких пикселей, отстоящее от границы изображения.
[Уравнение 1]
Этап S306
На этапе S306, блок 260 дисплея отображает на мониторе 705 томограммы или изображения поперечных сечений, полученные на этапе S302. Например, отображаются изображения, как схематично показано на фиг.4A и 4B. Здесь, так как томограммы являются трехмерными данными, изображения, которые фактически отображаются на мониторе 705, являются изображениями поперечных сечений, полученными, используя целевые поперечные сечения из томограмм, и эти изображения, которые фактически отображаются на экране, являются двумерными томограммами. Предпочтительно, чтобы изображения поперечных сечений, которые должны отображаться, могли выбираться произвольно оператором через графический интерфейс пользователя (GUI), такой как движок или кнопка. Кроме того, данные субъекта, полученные на этапе S301, могут отображаться вместе с томограммами.
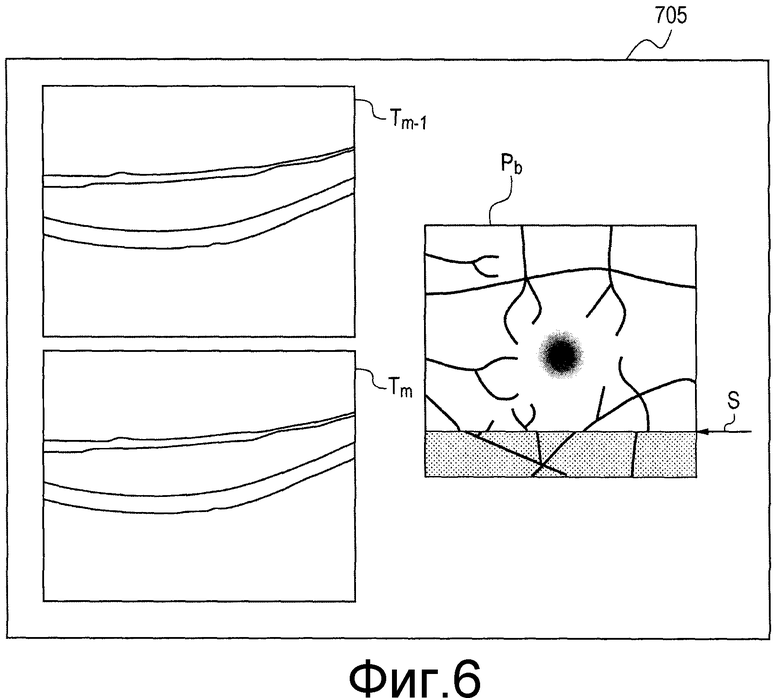
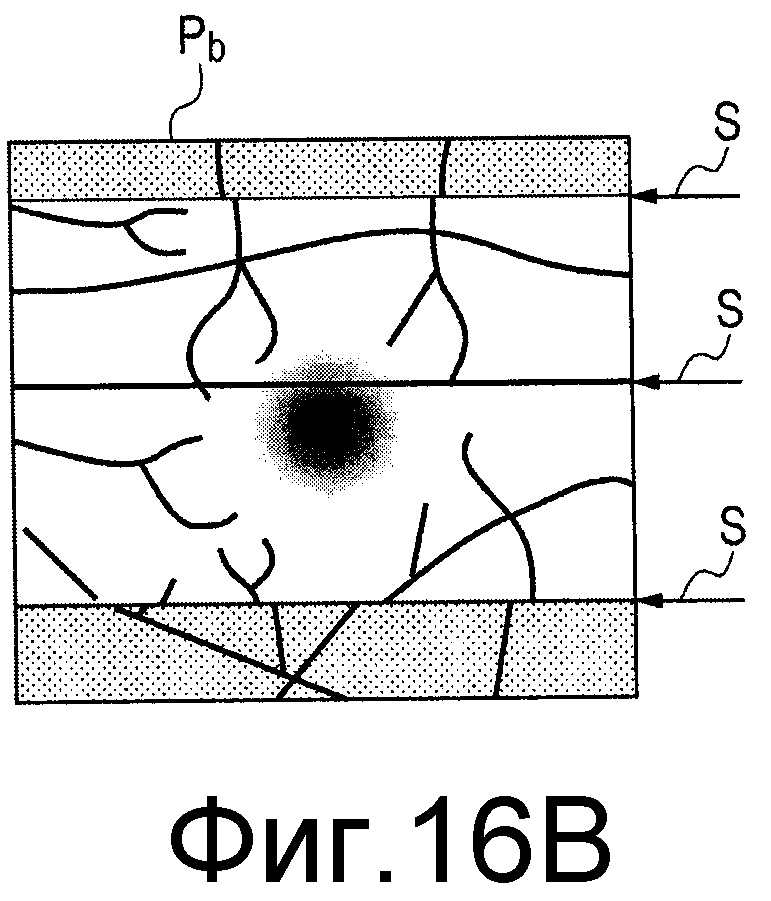
[0053] Когда блок 253 определения на этапе S305 определяет, что позиции объемных данных томограммы терпят разрыв, блок 253 определения отображает этот факт на этапе S306, используя блок 260 дисплея. На фиг.6 показан пример отображения на экране. На фиг.6 томограммы Тm-1 и Тm, которые являются томограммами до и после границы, на которой был обнаружен разрыв, отображаются на экране и интегрированное изображение Pb, и маркер S, указывающий место, где имеется смещение положения, отображаются на экране. Однако пример отображения не ограничивается этим примером. Только одна из томограмм, которые находятся до и после границы, на которой был обнаружен разрыв, может отображаться на экране. Альтернативно, не может отображаться никакое изображение и отображаться может только тот факт, что разрыв был обнаружен.
На фиг.7A с помощью стрелки показано место, где имеется движение глазного яблока. На фиг.7B с помощью стрелки показано место, где имеется мигание. На фиг.7C показана взаимосвязь между значением степени концентрации кровеносных сосудов, которое является количеством концов кровеносных сосудов в изображениях поперечных сечений, и состоянием глаза субъекта. Когда глаз субъекта мигает, кровеносные сосуды полностью перекрываются и, следовательно, степень концентрации кровеносных сосудов становится выше. Чем больше движение глаза, тем больше положения кровеносных сосудов в изображениях поперечных сечений флюктуируют между изображениями поперечных сечений. Таким образом, степень концентрации кровеносных сосудов имеет тенденцию повышения. То есть, степень концентрации кровеносных сосудов указывает состояние захвата изображения, такое как перемещение или мигание глаза субъекта. Блок 252 обработки изображений может также вычислять степень подобия между изображениями поперечных сечений. Степень подобия может быть указана, используя, например, значение корреляции между изображениями поперечных сечений. Значение корреляции вычисляется из значений индивидуальных пикселей изображений поперечных сечений. Когда степень подобия 1, это указывает, что изображения поперечных сечений являются одними и теми же. Чем ниже степень подобия, тем больше величина перемещения глазного яблока. Когда глаз мигает, степень подобия приближается к 0. Поэтому, состояние захвата изображения, такое как, насколько глаз субъекта двигался или мигал ли глаз субъекта, может также быть получено из степени подобия между изображениями поперечных сечений. На фиг.7D показана взаимосвязь между степенью подобия и положением изображений поперечных сечений.
Таким образом, блок 253 определения определяет непрерывность томограмм и определяет состояние захвата изображения, такое как перемещение или мигание глаза субъекта.
Этап S307
На этапе S307 блок 230 получения команды получает извне команду повторно получить или не получить изображение глаза субъекта. Эта команда вводится оператором, например, через клавиатуру 706 или мышь 707. Когда подается команда повторно получить изображение, последовательность выполнения операций возвращается к этапу S301 и процесс на том же самом глазе субъекта выполняется повторно. Когда никакая команда повторно получить изображение не подается, последовательность выполнения операций переходит к этапу S308.
Этап S308
На этапе S308 блок 230 получения команды получает извне команду сохранить или не сохранить результат этого процесса на глазу субъекта в сервере 40 данных. Эта команда вводится оператором, например, через клавиатуру 706 или мышь 707. Когда подается команда сохранить данные, последовательность выполнения операций переходит к этапу S309. Когда никакая команда сохранить данные не подается, последовательность выполнения операций переходит к этапу S310.
Этап S309
На этапе S309 блок 270 вывода результата объединяет время и дату обследования, информацию идентификации глаза субъекта, томограммы глаза субъекта и информацию, полученную блоком 252 обработки изображений, и отправляет объединенную информацию как информацию, которая должна быть сохранена, на сервер 40 данных.
Этап S310
На этапе S310 блок 230 получения команды получает извне команду завершить или не завершить процесс на томограммах. Эта команда вводится оператором, например, через клавиатуру 706 или мышь 707. Когда получена команда завершить процесс, система 10 обработки изображений завершает процесс. Напротив, когда получается команда продолжить процесс, последовательность выполнения операций возвращается к этапу S301 и выполняется процесс на глазу следующего субъекта (или повторный процесс на глазу того же самого субъекта).
Описанным выше способом проводится процесс, выполняемый системой 10 обработки изображений.
Для описанной выше структуры, являются ли томограммы непрерывными, определяется по интегрированному изображению, созданному из позиций объемных данных томограммы, и результат представляется врачу. Таким образом, врач может легко определить точность томограмм глаза и эффективность работы врача может быть улучшена. Дополнительно, можно иметь состояние в котором было захвачено изображения, такое как движение или мигание глаза субъекта во время захвата изображения с использованием OCT.
Второй вариант осуществления
В настоящем варианте осуществления подробности процесса, выполняемого блоком 252 обработки изображений, отличаются. Описание частей процесса, являющихся такими же или подобными первому варианту осуществления, будут опущены.
Блок 252 обработки изображений обнаруживает область края в интегрированном изображении. Обнаруживая область края, параллельную направлению сканирования в то время, когда были получены томограммы, блок 252 обработки изображений получает, в числах, степень подобия между изображениями поперечных сечений, составляющими объемные данные томограммы.
Когда интегрированное изображение создается из объемных данных томограммы, захваченных при захвате томограмм положения, удаленного от сетчатки, так как глаз двигался в то время, когда получали томограммы, интегрированное значение отличается в том месте, где существует смещение положения за счет разности в толщине слоев сетчатки.
Альтернативно, когда глаз мигал в то время, когда происходило захват томограмм, интегрированное значение становится равным 0 или чрезвычайно малым. Таким образом, на границе, где имеет место изменение положения или мигание, существует разница по яркости. На фиг.9A показан пример интегрированного изображения. На фиг.9B показан пример градиентного изображения.
На фиг.9A и 9B направление сканирования во время захвата томограмм параллельно направлению по оси х. На фиг.9A показан пример интегрированного изображения Pb, положение которого смещено. На фиг.9B показан пример изображения Pb' границы, созданного из интегрированного изображения Pb. На фиг.9B ссылка E означает область границы, параллельную направлению сканирования в то время, когда были получены томограммы (направление по оси х). Изображение Pb' границы создается посредством удаления шумовых компонент, применяя сглаживающий фильтр к интегрированному изображению Pb и используя фильтр определения границы, такой как фильтр Собела или фильтр Кэнни. Примененные здесь фильтры могут быть фильтрами, не обладающими направленностью, или фильтрами, учитывающими направленность. Когда направленность учитывается, предпочтительно использовать фильтры, улучшающие компоненты, параллельные направлению сканирования во время захвата изображения с использованием OCT.
Блок 252 обработки изображений определяет в изображении Pb' края ряд определенного количества последовательных краевых областей, которые параллельны направлению сканирования во время захвата изображения с использованием OCT (направление по оси х) и которые больше или равны порогу. Определяя конкретное количество последовательного областей Е края, которые параллельны направлению сканирования (направлению по оси х), их можно различать от краев кровеносных сосудов и шума.
При определении непрерывности томограмм и состояния захвата изображения глаза субъекта, блок 252 обработки изображений получает в виде чисел длину определенного количества последовательных областей Е края.
Блок 253 определения определяет непрерывность томограмм и состояние захвата изображения глаза субъекта, выполняя сравнение с порогом Th'.
Например, определение делается на основе следующего уравнения (2), где E обозначает длину последовательных областей края. Порог Th' может быть фиксированным значением или может быть установлен на основе статистических данных. Альтернативно, порог Th' может быть установлен на основе информации о субъекте (возраст, пол и/или раса). Предпочтительно, чтобы порог Th' мог динамически изменяться в соответствии с размером изображения. Например, чем меньше размер изображения, тем меньше порог Th'. Дополнительно, диапазон определенного количества последовательных областей края не ограничивается диапазоном на параллельной линии. Определение может быть сделано, используя диапазон определенного количества последовательных областей края на двух или более последовательных параллельных линиях.
[Уравнение 2]
Е ≥ Th'
Третий вариант осуществления
В настоящем варианте осуществления блок 252 обработки изображений выполняет частотный анализ, основываясь на преобразовании Фурье, чтобы получить частотные характеристики. Блок 253 определения определяет, являются ли позиции объемных данных томограммы непрерывными в соответствии с мощностью в частотной области.
На фиг.10A представлен пример интегрированного изображения. На фиг.10B показан пример спектра мощности. Конкретно, на фиг.10A показано интегрированное изображение Pb, созданное, когда захват изображения оказалось неудачным из-за изменения положения, и на фиг.10B показан спектр Pb" мощности интегрированного изображения. Когда существует смещение положения из-за движения глаз во время захвата изображения или когда глаз мигает во время захвата изображения, обнаруживается спектр, ортогональный направлению сканирования во время захвата изображения с использованием OCT.
Используя эти результаты, блок 253 определения определяет непрерывность томограмм и состояние захвата изображения глаза субъекта.
Четвертый вариант осуществления
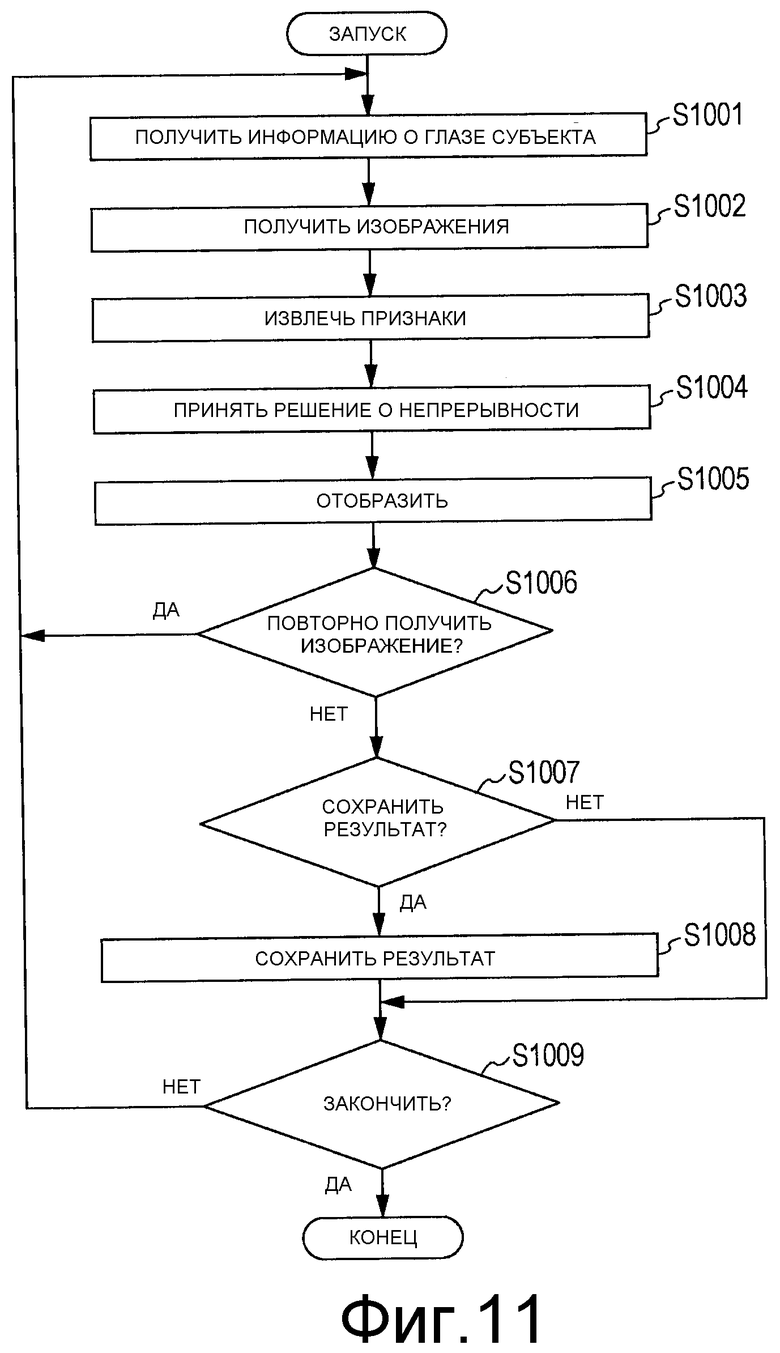
Система 10 обработки изображений, соответствующая первому варианту осуществления, получает томограммы глаза субъекта, создает интегрированное изображение из объемных данных томограммы и определяет точность захваченных изображений, используя непрерывность признаков изображения, полученных из интегрированного изображения. Устройство обработки изображений, соответствующее настоящему варианту осуществления, подобно первому варианту осуществления, в котором процесс выполняется на захваченных томограммах глаза субъекта. Однако настоящий вариант осуществления отличается от первого варианта осуществления тем, что вместо создания интегрированного изображения непрерывность томограмм и состояние захвата изображения глаза субъекта определяются из признаков изображения, захваченных из томограмм.
Обращаясь теперь к блок-схему последовательности выполнения операций, показанной на фиг.11, будет описан процесс, выполняемый системой 10 обработки изображений, соответствующей настоящему варианту осуществления. Обработка на этапах S1001, S1002, S1005, S1006, S1007, S1008 и S1009 является такой же, как обработка на этапах S301, S302, S306, S307, S308, S309 и S310 и их описание опускается.
Этап S1003
На этапе S1003 блок 252 обработки изображений извлекает из томограмм информацию, полученную для определения непрерывности объемных данных томограммы.
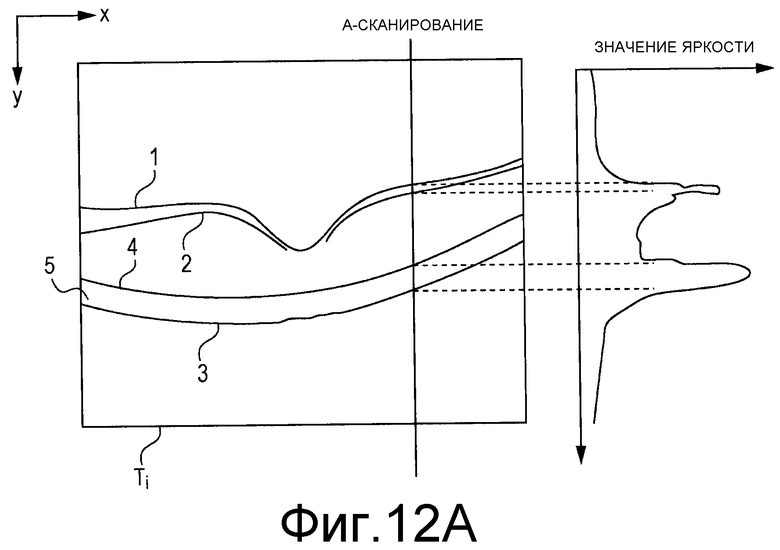
[0078] Блок 252 обработки изображений обнаруживает в томограммах визуальный клеточный слой, как признак определения непрерывности объемных данных томограммы, и обнаруживает область, в которой значение яркости низкое в визуальном клеточном слое. Здесь далее конкретный процесс, выполняемый блоком 252 обработки изображений, будет описан с использованием фиг.12A и 12B. На фиг.12A и 12B показаны примеры описания признаков томограммы. То есть, левый чертеж на фиг.12A показывает двумерную томограмму T1 и правый чертеж на фиг.12A показывает профиль изображения вдоль A-сканирования в положении, в котором на левом чертеже нет никаких кровеносных сосудов. Другими словами, правый чертеж показывает соотношение между координатами и значением яркости на линии, указанной как A-сканирование.
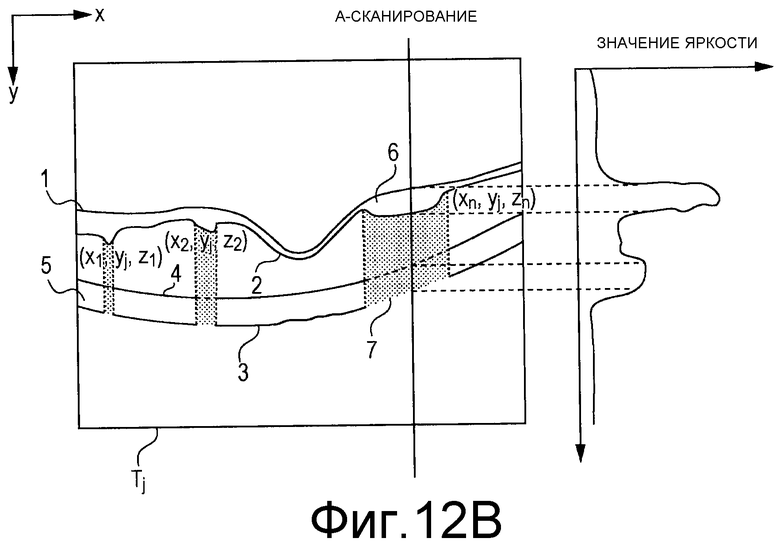
На фиг.12B содержатся диаграммы, подобные фиг.12A, показывающие случай, в котором используются кровеносные сосуды. Каждая из двумерных томограмм Ti и Tj содержит внутреннюю ограничивающую мембрану 1, границу 2 нервного волоконного слоя, пигментированный слой сетчатки 3, визуальное соединение 4 внутреннего клеточного слоя/внешнего сегмента, визуальный клеточный слой 5, область 6 кровеносных сосудов и область 7 под кровеносным сосудом.
Блок 252 обработки изображений определяет границу между слоями в томограммах. Здесь предполагается, что трехмерная томограмма, служащая целью обработки, представляется набором изображений в поперечном сечении (например, изображения B-сканирования) и последующая обработка двумерных изображений выполняется на индивидуальных изображениях в поперечных сечениях. Сначала процесс сглаживающей фильтрации выполняется на целевом изображении в поперечном изображении, чтобы удалить шумовые компоненты. В томограмме обнаруживаются компоненты края и на основе их связи несколько линий извлекаются как кандидаты на границу между слоями. Из числа этих кандидатов верхняя линия выбирается как внутренняя ограничивающая мембрана 1. Линия, следующая сразу под внутренней ограничивающей мембраной 1 выбирается в качестве границы 2 слоя нервного волокна. Нижняя линия выбирается как пигментированный слой сетчатки 3. Линия, следующая сразу над пигментированным слоем сетчатки 3 выбирается как визуальное соединение 4 визуального внутреннего/внешнего сегмента. Область, охваченная визуальным соединением 4 внутренней клетки/внешнего сегмента, и пигментированный слой сетчатки 3 рассматриваются как визуальный клеточный слой 5. Когда нет большого изменения значения яркости и когда никакой компонент края, не превышающий или равный порогу, не может быть обнаружен вдоль линии A-сканирования, граница между слоями может быть интерполирована, используя координатные точки из группы точек определения на левой и правой сторонах или во всей области.
Применяя способ динамического контура, такой как способ Снейка или способ установки уровня, используя эти линии в качестве начальных значений, точность определения может быть улучшена. Используя такой способ, как нарезание графика, можно определять границу между слоями. Определение границы, используя способ динамического контура или способ нарезания графика, можно выполнить трехмерно на трехмерной томограмме. Альтернативно, трехмерная томограмма, служащая целью обработки, может рассматриваться как набор изображений в поперечном сечении, и такое определение границы может быть выполнено двумерно на индивидуальных изображениях поперечных сечений. Способ определения границы между слоями не ограничивается описанными выше способами и может использоваться любой способ, насколько он способен определить границу между слоями в томограммах глаза.
Как показано на фиг.12B, значения яркости в области под кровеносным сосудом 7 обычно являются низкими. Следовательно, кровеносный сосуд может обнаруживаться, определяя область, в которой значения яркости, в целом, низкие в направлении А-сканирования в визуальном клеточном слое 5.
В описанном выше случае область, в которой значения яркости являются низкими, определяется в визуальном клеточном слое 5. Однако, признак кровеносного сосуда этим не ограничивается. Кровеносный сосуд может обнаруживаться, обнаруживая изменение толщины между внутренней ограничивающей мембраной 1 и границей 2 слоя нервных волокон (то есть, слоя нервных волокон) или изменение толщины между левой и правой сторонами. Например, как показано на фиг.12B, когда видно изменение толщины слоя в направлении х, толщина между внутренней ограничивающей мембраной 1 границей 2 слоя нервных волокон внезапно становится больше в части кровеносного сосуда. Таким образом, определяя эту область, может быть определен кровеносный сосуд. Дополнительно, описанные выше процессы может объединяться, чтобы обнаружить кровеносный сосуд.
Этап S1004
На этапе S1004 блок 252 обработки изображений выполняет процесс на кровеносных сосудах, захваченных на этапе S1003, и определяет непрерывность объемных данных томограммы.
Блок 252 обработки изображений следит, начиная от концов кровеносных сосудов, расположенных вблизи пятна сетчатки, за индивидуальными кровеносными сосудами и помечает прослеживаемые кровеносные сосуды как "прослеживаемые". Блок 252 обработки изображений сохраняет координаты концов прослеженных кровеносных сосудов в блоке 240 хранения данных. Блок 252 обработки изображений подсчитывает все вместе координаты концов кровеносных сосудов, существующих на линии, параллельной направлению сканирования в момент захвата изображения с использованием OCT. В случае, показанном на фиг.12A и 12B, когда направление сканирования во время захвата изображения с использованием OCT параллельно направлению x, точки, существующие с одной и той же координатой y, определяют изображение в поперечном сечении (например, изображение B-сканирования)..подсчитывает все координаты (x1, yj, z1), (x2, yj, z2),... (xn, yj, zn). При наличии какого-либо изменения в состоянии захвата изображения глаза субъекта возникает смещение положения между изображениями поперечных сечений (изображениями В-сканирований). Таким образом, концы кровеносных сосудов сосредотачиваются на линии на границе, на которой произошло смещение положения. Поскольку последующий процесс является таким же, как в первом варианте осуществления, его подробное описание опущено.
Для описанной выше структуры непрерывность томограмм определяется из объемных данных томограмм и результат определения представляется врачу. Поэтому врач может легко определить точность томограмм глаза и эффективность работы врача может быть улучшена.
Пятый вариант осуществления
Настоящий вариант осуществления описывает способ вычисления степени подобия в первом варианте осуществления более подробно. Блок 252 обработки изображений дополнительно содержит блок 254 вычисления степени подобия (не показан), вычисляющий степень подобия или разницу между между изображениями поперечных сечений. Блок 253 определения определяет непрерывность томограмм и состояние захвата изображения глаза субъекта, используя степень подобия или различия. В последующем описании предполагается, что должна быть вычислена степень подобия.
Блок 254 вычисления подобия вычисляет степень подобия между последовательными изображениями поперечных сечений. Степень подобия может быть вычислена, используя сумму квадратов разностей (SSD) для разности яркостей или сумму абсолютной разности (SAD) разности яркостей. Альтернативно, может быть получена полная информация (MI). Способ вычисления степени подобия между изображениями поперечных сечений не ограничивается упомянутыми выше способами. Любой способ может использоваться, если он позволяет вычислить степень подобия между изображениями поперечных сечений. Например, блок 252 обработки изображений получает среднее значение плотности или дисперсию как признак цвета или плотности, получает признак Фурье, матрицу смежности плотности и т.п. как признак текстуры, и получает форму слоя, форму кровеносного сосуда и т.п. как признак формы. Вычисляя расстояние в пространстве признаков изображения, блок 254 вычисления степени подобия может определить степень подобия. Вычисленное расстояние может быть евклидовым расстоянием, обобщенным расстоянием Махаланобиса и т.п.
Блок 253 определения определяет, что последовательные изображения поперечных сечений (изображения B-сканирования) были нормально получены, когда степень подобия, полученная блоком 254 вычисления степени подобия, больше или равна порогу. Порог степени подобия может изменяться в соответствии с расстоянием между двумерными томограммами или скоростью сканирования. Например, в случае, в котором получают изображение в диапазоне 6×6 мм при 128 срезах (изображениях B-сканирования), и в случае, в котором то же самое изображение получают при 256 срезах (изображениях B-сканирования), степень подобия между изображениями поперечных сечений в случае 256 срезов становится выше. Порог степени подобия может быть установлен как фиксированное значение или может быть установлен на основе статистических данных. Альтернативно, порог степени подобия может быть установлен на основе информации о субъекте (возраст, пол и/или раса). Когда степень подобия меньше порога, принимается решение, что последовательные изображения поперечных сечений терпят разрыв. Соответственно, в то время, когда изображение было захвачено, может быть обнаружено изменение положения или мигание.
Шестой вариант осуществления
Устройство обработки изображений, соответствующее настоящему варианту осуществления, подобно первому варианту осуществления в том, что процесс выполняется на захваченных томограммах глаза субъекта. Однако настоящий вариант осуществления отличается от предшествующих вариантов осуществления тем, что изменение положения или мигание в то время, когда было захвачено изображение, обнаруживается из признаков изображения, захваченных из томограмм одного и того же субъекта, которые получены в разное время в прошлом, и из признаков изображения, захваченных в настоящее время томограмм.
Функциональные блоки системы 10 обработки изображений 10, соответствующей настоящему варианту осуществления, отличаются от первого варианта осуществления (фиг.2) тем, что устройство 250 обработки изображений имеет блок 254 вычисления степени подобия (не показан).
Теперь со ссылкой на блок-схему последовательности выполнения операций способа, показанную на фиг.13, будет описан процесс, выполняемый системой 10 обработки изображений, соответствующей настоящему варианту осуществления. Поскольку этапы S1207, S1208, S1209 и S1210 в настоящем варианте осуществления являются тем же самым, что и этапы S307, S308, S309, и S310 в первом варианте осуществления, их описание опускается.
Этап S1201
На этапе S1201 блок 210 получения информации о глазе субъекта получает извне идентификационный номер субъекта как информацию для идентификации глаза субъекта. Эта информация вводится оператором через клавиатуру 706, мышь 707 или устройство считывания с перфокарт (не показано). На основе идентификационного номера субъекта блок 210 получения информации о глазе субъекта получает информацию, касающуюся глаза субъекта, которая хранится в сервере 40 данных. Например, блок 210 получения информации о глазе субъекта получает имя, возраст и пол субъекта. Дополнительно, блок 210 получения информации о глазе субъекта получает томограммы глаза субъекта, которые были получены в прошлом. Когда существуют другие позиции информации об обследовании, в том числе, данные результатов измерений, например, зрения, длины глазного яблока и внутриглазного давления, блок 210 получения информации о глазе субъекта может получить эти данные результатов измерений. Блок 210 получения информации о глазе субъекта отправляет полученную информацию на блок 240 хранения данных 240.
Когда изображение того же самого глаза получается повторно, эта обработка на этапе S1201 может быть пропущена. Когда должна быть добавлена новая информация, эта информация получается на этапе S1201.
Этап S1202
На этапе S1202, блок 220 получения изображения получает томограммы, переданные от устройства 20 захвата томограмм. Блок 220 получения изображения передает полученную информацию на устройство 240 хранения данных.
Этап S1203
На этапе S1203 блок 251 создания интегрированного изображения создает интегрированное изображение, интегрируя изображения поперечных сечений (например, изображения B-сканирования) в направлении глубины. Блок 251 создания интегрированного изображения получает из блока 240 хранения данных прошлые томограммы, полученные блоком 210 получения информации о глазе субъекта на этапе S1201, и текущие томограммы, полученные блоком 220 получения изображения на этапе S1202. Блок 251 создания интегрированного изображения создает интегрированное изображение из прошлых томограмм и интегрированное изображение из текущих томограмм. Поскольку указанный способ создания этих интегрированных изображений является тем же самым, что и в первом варианте осуществления, его подробное описание будет опущено.
Этап S1204
На этапе S1204 блок 254 вычисления степени подобия вычисляет степень подобия между интегрированными изображениями, созданными из томограмм, захваченных в разное время.
Здесь далее конкретный процесс, выполняемый блоком 254 вычисления степени подобия будет описан, используя фиг.14A-14C. На фиг.14A-14C представлены примеры интегрированных изображений и частей изображений. Конкретно, на фиг.14A показано интегрированное изображение Pa, созданное из томограмм, захваченных в прошлом. На фиг.14B показаны частичные интегрированные изображений Pa1-Pan, созданные из интегрированного изображения Pa. На фиг.14C показано интегрированное изображение Pb, созданное из от томограмм, захваченных в настоящий момент. Здесь, в частичных интегрированных изображениях Pa1-Pan предпочтительно, чтобы линия, параллельная направлению сканирования во время захвата изображения с использованием OCT, содержалась в той же самой области. Количество n делений частичных интегрированных изображений является произвольным числом, и количество n делений может динамически изменяться в соответствии с размером томограммы (X, Y, Z).
Степень подобия может быть вычислена, используя сумму квадратов разностей (SSD) для разности яркостей, сумму абсолютной разности (SAD) разности яркостей или полную информацию (MI). Способ вычисления степени подобия между изображениями поперечных сечений не ограничивается упомянутыми выше способами. Любой способ может использоваться, пока он позволяет вычислить степень подобия между изображениями поперечных сечений.
Когда блок 253 определения вычисляет степень подобия между каждым из частичных интегрированных изображений Pa1-Pan и интегрированным изображением Pb, если все степени подобия частичных интегрированных изображений Pa1-Pan больше или равны порогу, блок 253 определения определяет, что движение глазного яблока является малым и что захват изображения прошел успешно.
Если существует какое-либо частичное интегрированное изображение, степень подобия которого меньше порога, блок 254 вычисления подобия дополнительно делит это частичное интегрированное изображение на m изображений и вычисляет степень подобия между каждым из разделенных на m изображений и интегрированным изображением Pb и определяет место (изображение), степень подобия которого больше или равна порогу. Эти процессы повторяются, пока не станет невозможным далее делить частичное интегрированное изображение или пока не будет точно определено изображение поперечного сечения снимка, степень подобия которого меньше порога. В интегрированном изображении, созданном из томограмм, захваченных в случае, когда глазное яблоко движется или глаз мигает, изменение положения происходит в пространстве и, следовательно, некоторые из частичных интегрированных изображений, для которых захват изображения прошел успешно, пропускаются. Таким образом, блок 253 определения определяет, что частичное интегрированное изображение, степень подобия которого меньше порога, даже когда частичное интегрированное изображение дополнительно делится на изображения, или частичное интегрированное изображение, степень подобия которого больше или равна порогу в позиционно конфликтном месте (порядок частичных интегрированных изображений изменяется), пропускается.
Этап S1205
[0102] Когда степень подобия, вычисленная блоком 254 вычисления степени подобия, больше или равна порогу, блок 253 определения определяет, что последовательные двумерные томограммы получены нормально. Если степень подобия меньше порога, блок 253 определения определяет, что томограммы не являются последовательными. Блок 253 определения также определяет, что во время захвата изображения имело место изменение положения или мигание.
Этап S1206
На этапе S1206, блок 260 дисплея отображает томограммы, полученные на этапе S1202, на мониторе 705. Подробности, отображаемые на мониторе 705, являются такими же, как те, которые отображаются на этапе S306 в первом варианте осуществления. Альтернативно, томограммы глаза одного и того же субъекта, полученные в различное время, которые получаются на этапе S1201, могут дополнительно отображаться на мониторе 705.
В настоящем варианте осуществления из томограмм создается интегрированное изображение, вычисляется степень подобия и определяется непрерывность. Однако вместо создания интегрированного изображения, степень подобия может быть вычислена между томограммами и непрерывность может быть определена.
Для описанной выше структуры непрерывность томограмм определяется из степени подобия между интегрированными изображениями, созданными из томограмм, захваченных в разное время, и результат определения представляется врачу. Поэтому врач может легко определить точность томограмм глаза и эффективность диагностики при работе врача может быть улучшена.
Седьмой вариант осуществления
В настоящем варианте осуществления блок 254 вычисления степени подобия вычисляет степень подобия между моделями кровеносных сосудов, созданными из томограмм, захваченных в разное время, и блок 253 определения определяет непрерывность объемных данных томограммы, используя степень подобия.
[0107] Так как способ обнаружения кровеносных сосудов с использованием блока 252 обработки изображений является тем же самым, что и на этапе S304 в первом варианте осуществления, описание его будет опущено. Например, модель кровеносных сосудов является многослойным изображением, в котором кровеносный сосуд соответствует 1, а другие ткани соответствуют 0, или только часть кровеносных сосудов соответствуют шкале серых тонов, а другие ткани соответствуют 0. На фиг.15A-15C показаны примеры моделей кровеносных сосудов. То есть, на фиг.15A-15C показаны примеры моделей кровеносных сосудов и частичных моделей. На фиг.15A показана модель Va кровеносных сосудов, созданная из томограмм, захваченных в прошлом. На фиг.15B показаны частичные модели Va1-Van, созданные из модели Va кровеносных сосудов. На фиг.15C показана модель Vb кровеносных сосудов, созданная из томограмм, захваченных в настоящий момент. Здесь, в частичных моделях Va1-Van кровеносных сосудов предпочтительно, чтобы линия, параллельная направлению сканирования во время захвата изображения с использованием OCT, содержалась в той же самой области. Количество n делений модели кровеносных сосудов является произвольным числом, и количество n делений может динамически изменяться в соответствии с размером томограммы (X, Y, Z).
Как на этапах S1204 и S1205 в третьем варианте осуществления, непрерывность объемных данных томограммы определяется из степени подобия, полученной из томограмм, захваченных в разное время.
Восьмой вариант осуществления
В предшествующих вариантах осуществления блок 253 определения выполняет определение, объединяя оценку степени подобия и определение концов кровеносных сосудов. Например, используя частичные интегрированные изображения Pa1-Pan или частичные модели кровеносных сосудов Va1-Van, блок 253 определения оценивает степень подобия между томограммами, полученными в разное время. Только в частичных интегрированных изображениях Pa1-Pan или в частичных моделях Va1-Van кровеносных сосудов, чьи степени подобия меньше порога, блок 253 определения может следить за кровеносными сосудами и обнаруживать концы кровеносных сосудов, а также может определять непрерывность объемных данных томограммы.
Другие варианты осуществления
В предшествующих вариантах осуществления возможность захвата изображения глаза субъекта повторно может быть определена автоматически. Например, когда блок 253 определения определяет разрыв, изображение получают повторно. Альтернативно, изображение получают повторно, когда место, в котором определяется разрыв, определяется в пределах определенного диапазона относительно центра изображения. Альтернативно, изображение получают повторно, когда разрыв определяется во множестве мест. Альтернативно, изображение получается повторно, когда величина изменения положения, оцененная по рисунку кровеносных сосудов, больше или равна порогу. Оценка величины изменения положения может быть выполнена не обязательно по рисунку кровеносных сосудов, она может быть выполнена сравнением с прошлым изображением. Альтернативно, изображение получают повторно в соответствии с тем, является ли глаз здоровым или страдает заболеванием, и когда глаз страдает заболеванием, изображение получают повторно, когда обнаруживается разрыв. Альтернативно, изображение получается повторно, когда разрыв определяется в месте, где присутствует болезнь (лейкома или кровоточивость), при сравнении с прошлыми данными. Альтернативно, изображение получают повторно, когда существует смещение положения в месте, которое указывается врачом или оператороми для захвата изображения. Нет необходимости выполнять эти процессы независимо и может быть выполнено объединение этих процессов. Когда принимается решение о захвате изображения повторно, последовательность выполнения операций возвращается к началу и процесс выполняется на глазу того же самого субъекта повторно.
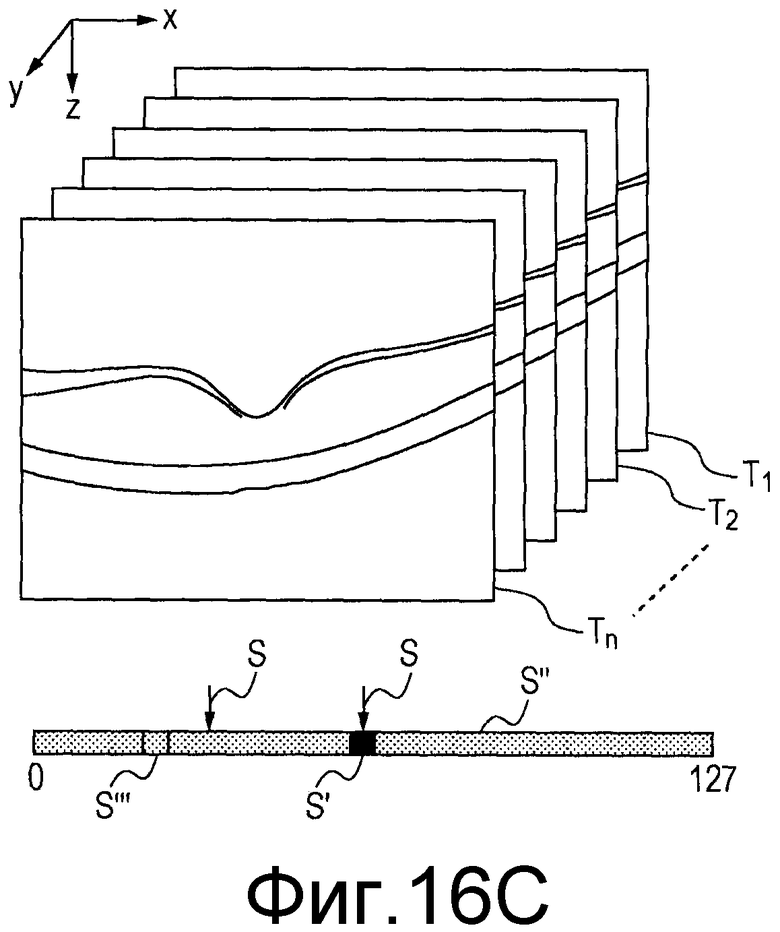
В предшествующих вариантах осуществления пример отображения на блоке 260 дисплея не ограничивается показанным на фиг.6. Например, используя фиг.16A-16C, будут описаны другие примеры. На фиг.16A-16C представлены схематические изображения, показывающие примеры отображения на экране. На фиг.16A показан пример, в котором величина изменения положения оценивается по структуре кровеносных сосудов, и эта величина изменения положения ясно показана на интегрированном изображении Pb. Область S' указывает предполагаемую неполученную область. На фиг.16B представлен пример, в котором разрыв, вызванный изменением положения или миганием, обнаруживается в многочисленных местах. В этом случае граничные томограммы во всех местах могут отображаться одновременно или граничные томограммы в местах, в которых величины изменений положения являются большими, могут отображаться одновременно. Альтернативно, одновременно могут отображаться граничные томограммы в местах вблизи центра или в местах, где имело место заболевание. Когда томограммы должны также отображаться одновременно, предпочтительно информировать оператора, используя цвета или цифры, указывающие, какому месту какая отображаемая томограмма соответствует. То, какие граничные томограммы должны отображаться, может свободно изменяться оператором, используя GUI (не показан). На фиг.16C показаны объемные данные томограммы T1-Tn и движок S'' и ручка S''' для работы с томограммой, которая должна отображаться. Маркер S указывает место, в котором обнаруживается разрыв объемных данных томограммы. Дополнительно, величина изменения S' положения может точно отображаться на движке S". Когда в дополнение к указанным выше изображениям существуют прежние изображения или широкие изображения, эти изображения также могут отображаться на экране одновременно.
В предшествующих вариантах осуществления процесс анализа выполняется на полученном изображении пятна сетчатки. Однако место для блока обработки изображений с целью определения непрерывности не ограничивается полученным изображением пятна сетчатки. Подобный процесс может быть выполнен на полученном изображении диска зрительного нерва. Дополнительно, подобный процесс может быть выполнен на полученном изображении, содержащем как пятно сетчатки, так и диск зрительного нерва.
В предшествующих вариантах осуществления процесс анализа выполняется на всей полученной трехмерной томограмме. Однако из трехмерной томограмы может быть выбрано целевое поперечное сечение, и процесс может быть выполнен на выбранной двумерной томограмме. Например, процесс может быть выполнен на изображении поперечного сечения, содержащем определенную часть (например, ямку) дна глаза. В этом случае граница между определенными слоями, нормальная структура и нормальные данные составляют двумерные данные для этого поперечного сечения.
Определение непрерывности объемных данных томограммы, используя систему 10 обработки изображений, которая была описана в предшествующих вариантах осуществления, не обязательно может выполняться независимо и может выполняться совместно. Например, непрерывность объемных данных томограммы может быть определена при одновременной оценке степени концентрации концов кровеносных сосудов, которая получается из интегрированного изображения, созданного из томограмм, как в первом варианте осуществления, и степени подобия между последовательными томограммами и значениями признаков изображения, как во втором варианте осуществления. Например, результаты обнаружения и значения признаков изображения, полученные из томограмм без изменения положения и из томограмм с изменениями положения, могут быть изучены и непрерывность объемных данных томограммы может быть определена, используя идентификатор. Само собой разумеется, любые из предшествующих вариантов осуществления могут объединяться друг с другом в различных комбинациях.
В предшествующих вариантах осуществления устройство 20 захвата томограммы не обязательно может соединяться с системой 10 обработки изображений. Например, томограммы, служащие в качестве целевых для обработки, могут быть получены и сохранены заранее в сервере 40 данных и обработка может быть выполнена, считывая эти томограммы. В этом случае блок 220 получения изображения дает запрос на сервер 40 данных, чтобы передать томограммы, получает томограммы, переданные от сервера 40 данных и выполняет определение границы слоя и обработку с квантификацией. Сервер 40 данных не обязательно может быть соединен с системой 10 обработки изображений. Внешнее запоминающее устройство 704 системы 10 обработки изображений может служить в роли сервера 40 данных.
Само собой разумеется, настоящее изобретение может осуществляться, обеспечивая управляющую программу для хранения на носителе данных программного обеспечения для осуществления функций предшествующих вариантов осуществления в системе или устройстве и считывая, и выполняя управляющую программу, хранящуюся на носителе данных, используя для этого компьютер (или CPU или микропроцессорный блок (MPU)) системы или устройства.
В этом случае управляющая программа, сама считанная с носителя данных, реализует функции предшествующих вариантов осуществления и носитель данных, хранящий управляющую программу, составляет настоящее изобретение.
В качестве носителя данных для обеспечения управляющей программы могут использоваться, например, дискета, жесткий диск, оптический диск, магнитооптический диск, постоянное запоминающее устройство на компакт-дисках (CD-ROM), перезаписываемый компакт-диск (CD-R), магнитная лента, карта энергонезависимой памяти или постоянное запоминающее устройство (ROM).
Аналогично реализации функций в предшествующих вариантах осуществления посредством выполнения управляющей программы, считанной компьютером, операционная система (OS), работающая на компьютере, может выполнять частичную или полную фактическую обработку на основе команд управляющей программы, чтобы реализовать функции предшествующих вариантов осуществления.
Дополнительно, плата расширения функций, помещенная в компьютере, или блок расширения функций, соединенный с компьютером, могут выполнять часть или всю обработку, чтобы реализовать функции предшествующих вариантов осуществления. В этом случае управляющая программа, считанная с носителя, может быть записана в запоминающее устройство, содержащееся в плате расширения функций или в блоке расширения функций. На основе команд управляющей программы CPU, содержащийся в плате расширения функций или в блоке расширения функций, может выполнить фактическую обработку.
Описание предшествующих вариантов осуществления приводит только пример предпочтительного устройства обработки изображений,соответствующего настоящему изобретению, и настоящее изобретение им не ограничивается.
Как совершенно очевидно, может быть осуществлено множество различных вариантов осуществления настоящего изобретения, не отступая от его сущности и объема, и следует понимать, что изобретение не ограничивается его конкретными вариантами осуществления, за исключением того, что определено в формуле изобретения.
Хотя настоящее изобретение было описано со ссылкой на примеры вариантов осуществления, следует понимать, что изобретение не ограничивается раскрытыми примерами вариантов осуществления. Объем приведенной ниже формулы изобретения должен получить самую широкую интерпретацию, чтобы охватить все такие изменения и эквивалентные структуры и функции.
Настоящая заявка пользуется преимуществами японской патентной заявки № 2008-287754, зарегистрированной 10 ноября 2008 г, которая содержится здесь полностью посредством ссылки.
Изобретение относится к медицинской технике, а именно к системам и способам обработки изображений с использованием томограммы глаза. Варианты выполнения устройств и способов для обработки изображений для определения: состояния захвата изображения глаза субъекта или непрерывности томограмм, а также носители данных с программами для выполнения способов, включают этапы работы с блоком обработки изображений, который получает информацию, указывающую непрерывность томограмм глаза субъекта и - с блоком определения, который определяет состояние захвата изображения глаза субъекта на основе информации, полученной блоком обработки изображений. Использование изобретения позволяет повысить точность томографического исследования. 15 н. и 7 з.п. ф-лы, 16 ил.
1. Устройство обработки изображений для определения состояния захвата изображения глаза субъекта, содержащее:
блок обработки изображений, выполненный с возможностью получения информации, указывающей непрерывность томограмм глаза субъекта; и
блок определения, выполненный с возможностью определения состояния захвата изображения глаза субъекта на основе информации, полученной блоком обработки изображений.
2. Устройство обработки изображений по п.1, в котором блок обработки изображений получает степень подобия между изображениями поперечных сечений, каждое из которых является одной из томограмм, и
блок принятия решений определяет состояние захвата изображения глаза субъекта на основе степени подобия между изображениями поперечных сечений.
3. Устройство обработки изображений по п.1, в котором блок обработки изображений получает из томограмм информацию о положении концов кровеносных сосудов, и блок определения определяет состояние захвата изображения глаза субъекта на основе количества концов кровеносных сосудов в изображениях поперечных сечений, которые являются двумерными томограммами, полученными из томограмм.
4. Устройство обработки изображений по п.1, в котором блок обработки изображений получает степень подобия между томограммами глаза субъекта, захваченными в разное время, и
в котором блок определения определяет состояние захвата изображения глаза субъекта на основе степени подобия между томограммами.
5. Устройство обработки изображений по п.2, в котором блок определения определяет, насколько глаз субъекта двигался или мигал ли глаз субъекта, на основе степени подобия между изображениями поперечных сечений.
6. Устройство обработки изображений по п.3, в котором блок определения определяет, насколько глаз субъекта двигался или мигал ли глаз субъекта, на основе количества концов кровеносных сосудов в изображениях поперечных сечений.
7. Устройство обработки изображений по п.1, дополнительно содержащее блок создания интегрированного изображения для создания интегрированного изображения, посредством интегрирования томограмм в направлении глубины,
в котором блок обработки изображений получает из интегрированного изображения степень подобия или количество концов кровеносных сосудов.
8. Устройство обработки изображений по п.1, дополнительно содержащее блок создания интегрированного изображения, выполненный с возможностью создания интегрированного изображения, посредством интегрирования томограмм в направлении глубины,
в котором блок обработки изображений получает из интегрированного изображения информацию об области, содержащей край, и
в котором блок определения определяет состояние захвата изображения глаза субъекта на основе длины края.
9. Устройство обработки изображений для определения непрерывности томограмм глаза субъекта, содержащее:
блок обработки изображений, выполненный с возможностью получения из томограмм информации о положении концов кровеносных сосудов; и
блок определения, выполненный с возможностью определения непрерывности томограмм в соответствии с количеством концов кровеносных сосудов, которые получаются блоком обработки изображений, в изображениях поперечных сечений, являющихся двумерными томограммами из числа томограмм.
10. Устройство обработки изображений для определения непрерывности томограмм глаза субъекта, содержащее:
блок обработки изображений, выполненный с возможностью проведения преобразования Фурье томограмм; и
блок определения, выполненный с возможностью определения непрерывности томограмм на основе значения мощности, полученного с помощью преобразования Фурье, выполненного блоком обработки изображений.
11. Устройство обработки изображений для определения состояния захвата изображения глаза субъекта, содержащее:
блок обработки изображений, выполненный с возможностью проведения преобразования Фурье томограмм; и
блок определения, выполненный с возможностью определения состояния захвата изображения глаза субъекта на основе значения мощности, полученного с помощью преобразования Фурье, выполненного блоком обработки изображений.
12. Способ обработки изображений для определения состояния захвата изображения глаза субъекта, содержащий:
этап обработки изображений, на котором получают информацию,
указывающую непрерывность томограмм глаза субъекта; и
этап определения, на котором определяют состояние захвата изображения глаза субъекта на основе информации, полученной на этапе обработки изображений.
13. Способ обработки изображений для определения непрерывности томограмм глаза субъекта, содержащий:
этап обработки изображений, на котором получают из томограмм информацию о положении концов кровеносных сосудов; и
этап определения, на котором определяют непрерывность томограмм в соответствии с количеством концов кровеносных сосудов, которые получаются на этапе обработки изображений, в изображениях поперечных сечений, являющихся двумерными томограммами из числа томограмм.
14. Способ обработки изображений для определения непрерывности томограмм глаза субъекта, содержащий:
этап обработки изображений, на котором выполняют преобразование Фурье томограмм; и
этап определения, на котором определяют непрерывность томограмм на основе значения мощности, полученного с помощью преобразования Фурье, выполняемого на этапе обработки изображений.
15. Способ обработки изображений для определения непрерывности томограмм глаза субъекта, содержащий:
этап обработки изображений, на котором получают степень подобия между изображениями поперечных сечений, составляющими каждую из томограмм; и
этап определения, на котором определяют непрерывность томограмм на основе степени подобия, полученной на этапе обработки изображений.
16. Способ обработки изображений для определения состояния захвата изображения глаза субъекта, содержащий:
этап обработки изображений, на котором выполняют преобразования Фурье для томограмм; и
этап определения, на котором определяют состояние захвата изображения глаза субъекта на основе значения мощности, полученного с помощью преобразования Фурье, выполняемого на этапе обработки изображений.
17. Носитель данных, на котором хранится программа для выполнения способа обработки изображений по п.12.
18. Устройство захвата томограммы для захвата томограммы глаза субъекта, содержащее:
блок обработки изображений, выполненный с возможностью получения информации, указывающей непрерывность томограмм глаза субъекта: и
блок определения, выполненный с возможностью определения изображения глаза субъекта повторно на основе информации, полученной блоком обработки изображений.
19. Способ захвата томограммы, содержащий:
этап обработки изображений, на котором получают информацию, указывающую непрерывность томограмм глаза субъекта; и
этап определения, сконфигурированный, чтобы повторно определять изображение глаза субъекта на основе информации, полученной на этапе обработки изображений.
20. Носитель данных, на котором хранится программа для выполнения способа захвата томограммы по п.19.
21. Устройство захвата томограммы для получения информации о глазе субъекта из информации изображения томограммы глаза субъекта, захваченной из когерентного света между отраженным светом глаза субъекта и опорным светом, причем упомянутое устройство захвата томограммы содержит:
блок обработки изображений, выполненный с возможностью получения, в качестве оценочного значения, степени подобия между изображениями поперечных сечений томограммы; и
блок определения, выполненный с возможностью определения величины перемещения глаза субъекта во время захвата томограммы на основе упомянутого оценочного значения, полученного блоком обработки изображений.
22. Способ захвата томограммы для получения информации о глазе субъекта из информации изображения томограммы глаза субъекта. захваченной из когерентного света между отраженным светом глаза субъекта и опорным светом, причем упомянутый способ захвата томограммы содержит:
этап обработки изображений, на котором получают, в качестве оценочного значения, степень подобия между изображениями поперечных сечений томограммы; и
этап определения, на котором определяют величину перемещения глаза субъекта во время захвата томограммы на основе упомянутого оценочного значения, полученного на этапе обработки изображений.
| Алмазная буровая коронка | 1988 |
|
SU1775545A1 |
| US 2003053072 A1, 20.03.2003 | |||
| JP 2003000543 A, 07.01.2003 | |||
| WO 2007084748 А2, 26.07.2007 | |||
| ЛАЗЕРНЫЙ КОНФОКАЛЬНЫЙ ДВУХВОЛНОВЫЙ РЕТИНОТОМОГРАФ С ДЕВИАЦИЕЙ ЧАСТОТЫ | 2007 |
|
RU2328208C1 |

