ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и устройству для определения и использования на стороне декодера частоты дискретизации при декодировании информации водяного знака (ВЗ), встроенной в принимаемый сигнал, дискретизированный с исходной частотой дискретизации на стороне кодера.
УРОВЕНЬ ТЕХНИКИ
Водяной знак (ВЗ) в аудио- или видеосигнале может быть обнаружен на стороне приема или декодирования сигнала с помощью корреляции, как описано например в патентных документах WO 2007/031423, WO 97/33391 (US 6584138 B1) или US 6061793.
Многие системы ВЗ используют корреляцию для вычисления показателя обнаружения. Это означает, что на стороне кодера генерируется несколько псевдослучайных последовательностей или эталонных образцов, или считывается из памяти, и одна или несколько таких последовательностей, или эталонных образцов встраиваются в контент (например, аудио- или видеосигнал), в зависимости от сообщения, которое необходимо встроить. На стороне декодера генерируются или считываются из памяти те же псевдослучайные последовательности. Кодирование и декодирование встроенного сообщения может выполняться с помощью частотного преобразования. Для декодирования встроенного сообщения необходимо определить, какая псевдослучайная последовательность или последовательности были встроены на стороне кодера. В описываемых системах это делается путем корреляции известных псевдослучайных последовательностей и контента, предположительно содержащего ВЗ, причем корреляция может выполняться для контента, прошедшего предварительную обработку, которая может включать в себя обратное частотное преобразование, формирование спектра и/или отбеливание.
Каждый встроенный эталонный образец может представлять один бит встроенного сообщения, или два или более бит. В зависимости от величины корреляционных результатов, ВЗ-детектор решает, была ли встроена в сигнал некоторая заданная псевдослучайная последовательность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Однако прием ВЗ-маркированных аудио- и видеосигналов и их ВЗ-декодирование затруднены в случаях, когда канал от ВЗ-кодера к ВЗ-декодеру не является цифровым. В таких случаях, например, когда существует акустический тракт, в котором ВЗ-маркированный аудиосигнал передается динамиком и затем принимается микрофоном, частота дискретизации различна на стороне кодера и на стороне декодера. Используется по меньшей мере один цифроаналоговый преобразователь (ЦАП) и один аналого-цифровой преобразователь (АЦП) со скорее всего немного различающимися частотами дискретизации. Такой акустический тракт используется в приложении для измерения аудитории какой-нибудь программы вещания с использованием стационарных или мобильных ВЗ-детекторов, а также может быть использован незаконным образом при пиратской записи во время киносеанса. Качество такого акустического тракта как правило изменяется по времени.
Задача, решаемая настоящим изобретением, состоит в правильном определении частоты дискретизации для декодирования информации водяного знака, встроенной в принятый искаженный сигнал. Способ решения этой задачи раскрыт в пункте 1 формулы настоящего изобретения. В пункте 2 формулы раскрывается устройство, использующее указанный способ.
В соответствии с настоящим изобретением, блок управления передискретизацией управляет частотой дискретизации в передискретизаторе, совместно с ВЗ-декодером аудиосигнала. ВЗ-декодер выдает, кроме битов ВЗ-информации, соответствующее занчение достоверности, выведенное из результатов корреляции и использующееся в блоке управления передискретизатором для синхронизации его частоты дискретизации с исходной частотой дискретизации входного ВЗ-маркированного сигнала. Выполнение синхронизации включает в себя «режим поиска» и «нормальный (т.е. синхронизованный) режим». Преимущество настоящего изобретения в том, что оно облегчает декодирование ВЗ-маркированных сигналов, начиная с изначально не синхронизированных частотах дискретизации.
По существу, настоящее изобретение предлагает способ определения и использования частоты дискретизации при декодировании информации водяного знака (ВЗ), встроенной в принимаемый сигнал при некоторой исходной частоте дискретизации на стороне кодера, причем декодирование включает в себя корреляцию с по меньшей мере одним эталонным образцом, причем способ содержит следующие этапы:
в режиме поиска:
- для последовательных частей или кадров упомянутого принимаемого сигнала многократно сканируют возможные частоты дискретизации в некотором диапазоне частот, включающем в себя упомянутую исходную частоту дискретизации, выполняя таким образом ВЗ-декодирование соответствующей части или кадра принимаемого сигнала, с использованием возможных частот дискретизации,
при этом для каждой из этих возможных частот дискретизации при ее использовании для ВЗ-декодирования из результатов упомянутого вычисления корреляции выводят битовое значение достоверности ВЗ, и суммируют или комбинируют эти значения достоверности для каждой возможной частоты дискретизации,
и при этом, как только упомянутое значение достоверности текущей возможной частоты дискретизации оказывается большим или равным некоторому первому пороговому значению, переходят из режима поиска в нормальный режим, выбрав для использования эту возможную частоту дискретизации;
- определяют максимум и второй максимум среди упомянутых суммарных значений достоверности, и при этом, как только их отношение или разность оказывается больше второго порогового значения, или когда достигается некоторое максимальное число циклов сканирования, переходят из режима поиска в нормальный режим, выбрав для использования ту возможную частоту дискретизации, которая связана с упомянутым максимальным суммарным значением достоверности, или в случае достижения упомянутого максимального числа циклов сканирования проверяют, превосходит ли упомянутое отношение или упомянутая разность упомянутое второе пороговое значение, и если нет, то продолжают режим поиска;
в нормальном (синхронизированном) режиме:
- принимают упомянутую выбранную возможную частоту дискретизации в качестве исходной частоты дискретизации, и на этой частоте выполняют декодирование ВЗ упомянутого принимаемого сигнала часть за частью или кадр за кадром.
По существу, настоящее изобретение предлагает устройство для определения и использования частоты дискретизации для декодирования информации водяного знака (ВЗ), встроенной в принимаемый сигнал при некоторой исходной частоте дискретизации на стороне кодера, причем декодирование включает в себя корреляцию с по меньшей мере одним из эталонных образцов, причем упомянутое устройство содержит средства, выполненные с возможностью:
в режиме поиска:
- для последовательных частей или кадров упомянутого принимаемого сигнала многократно сканировать предположительные частоты дискретизации в некотором диапазоне частот, включающем в себя исходную частоту дискретизации, выполняя таким образом ВЗ-декодирование соответствующей части или кадра принимаемого сигнала на этих возможных частотах дискретизации,
и при этом для каждой из этих возможных частот дискретизации, использованных для ВЗ-декодирования, определять соответствующее битовое значение достоверности ВЗ, полученное из упомянутого вычисления корреляции, и суммируют или комбинируют эти значения достоверности для каждой возможной частоты дискретизации,
и при этом далее, как только упомянутое значение достоверности текущей возможной частоты дискретизации оказывается большим или равным первому пороговому значению, переходить из режима поиска в нормальный режим, выбрав для использования эту возможную частоту дискретизации;
- определять максимум и второй максимум среди упомянутых суммарных значений достоверности, и при этом, как только их отношение или разность оказывается больше второго порогового значения, или когда достигается некоторое максимальное число циклов сканирования, переходить из режима поиска в нормальный режим, выбрав для использования ту возможную частоту дискретизации, которая связна с упомянутым максимальным суммарным значением достоверности; в случае же достижения упомянутого максимального числа циклов сканирования проверять, превосходит ли упомянутое отношение или упомянутая разность упомянутое второе пороговое значение, и если нет, то продолжать режим поиска;
в нормальном или синхронизированном режиме:
- приняв упомянутую выбранную возможную частоту дискретизации в качестве исходной частоты дискретизации, выполнять на этой частоте декодирование ВЗ упомянутого принимаемого сигнала часть за частью или кадр за кадром.
Дополнительные преимущества настоящего изобретения, описанные в соответствующих вариантах его реализации, раскрыты в соответствующих зависимых пунктах формулы настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры вариантов реализации настоящего изобретения описаны со ссылками на прилагаемые рисунки, на которых:
фиг.1 содержит основную блок-схему шагов или этапов передискретизации в соответствии с настоящим изобретением;
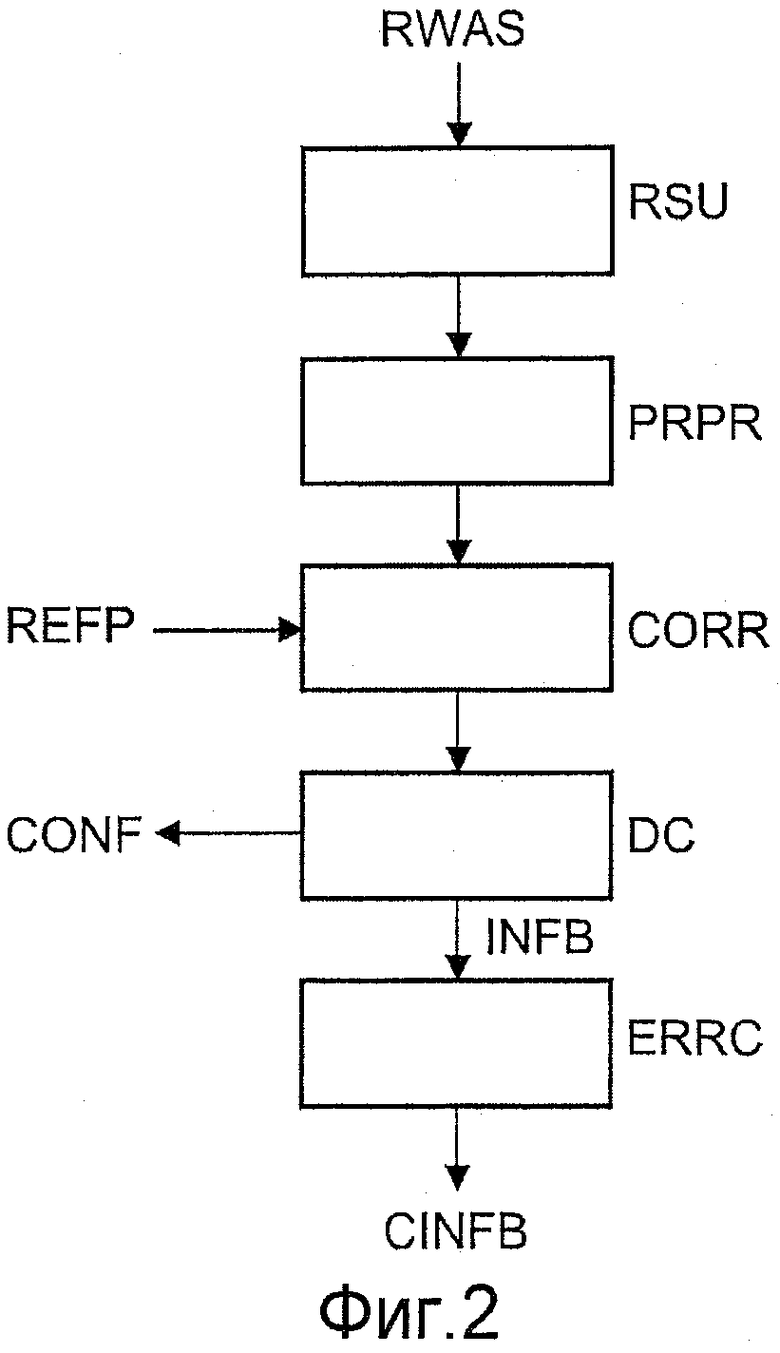
фиг.2 содержит более подробную блок-схему декодирования ВЗ.
ПРИМЕРЫ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Многие системы ВЗ-маркировки используют корреляцию на основе обнаружения, согласно которому на стороне кодера генерируется, или выбирается в памяти, несколько псевдослучайных последовательностей, представляющих каждая значение длиной в один бит или слово, и одна или более из этих последовательностей встраиваются в контент или сигнал (например, аудио- или видеосигнал), в зависимости от сообщения, которое необходимо встроить (например, биты водяного знака). Те же псевдослучайные последовательности генерируются или выбираются в памяти на стороне декодера. Для декодирования встроенного сообщения требуется определить, какие псевдослучайные последовательности были встроены в принятый контент или сигнал. Это делается при помощи корреляции известных псевдослучайных последовательностей с принятым контентом или сигналом, возможно прошедшим предварительную обработку. Затем в зависимости, например, от величин амплитудных значений результатов корреляции декодер или детектор приемника решает, была ли встроена данная последовательность.
На фиг.1 для обнаружения правильной частоты дискретизации входного ВЗ-маркированного сигнала RWAS используется ВЗ-декодер или функция WMDF декодирования, принимающая передискретизированный аудио-сигнал RAS и выдающая на выходе за один раз, например, один бит INFB ВЗ-информации и соответствующее, «значение достоверности» CONF, которое относится к декодированному биту INFB. Высокое значение CONF достоверности означает, что значение бита информации надежно (заслуживает доверия), в то время как низкое значение CONF достоверности указывает на ненадежность значения бита информации. Перед декодером WMDF устанавливается передискретизатор RS, принимающий входной ВЗ-маркированный сигнал RWAS и текущую частоту дискретизации ASFR, полученную от блока RCTRLU управления передискретизатором.
Блок RCTRLU управления передискретизатором принимает значения CONF достоверности, нижнее LSFR и верхнее HSFR значения частоты дискретизации, определяющие диапазон частот дискретизации, используемый как описано ниже, и совокупность MPAR дополнительных параметров, например первое пороговое значение достоверности, второе пороговое значение для максимального числа проверок диапазона частот, третье пороговое значение для максимума и второго максимума среди суммарных значений достоверности, число скользящих значений достоверности, суммируемых при работе в нормальном режиме, четвертое пороговое значение для текущего суммарного значения достоверности, число рассматриваемых возможных частот или расстояние между ними.
Низкое значение CONF достоверности может означать, что в соответствующий момент времени в акустическом тракте появились искажения, или что значение результата корреляции оказалось низким при текущей возможной частоте дискретизации (т.е. в корреляционных результатах не нашлось явного пикового значения), или и то, и другое. Нет возможности найти настоящую причину или причины для низкого текущего значения CONF достоверности.
Выполнение синхронизации происходит в двух различных режимах:
«Режим поиска» в начале работы
Задан диапазон (например ±1%) частот дискретизации, что означает, что для ожидаемой или возможной частоты дискретизации, например 48000 Гц, начальная частота LSFR поиска равна 47520 Гц и конечная частота HSFR поиска равна 48480 Гц. В указанном диапазоне частот между начальной и конечной частотами берется некоторое число тестовых частот, например 40 частот. Выбор интервала между соседними тестовыми частотами критичен: если это интервал слишком велик, передискретизатор не сможет синхронизироваться, а если он слишком мал, то тестовых частот будет слишком много и время поиска станет слишком большим.
Возможные частоты могут проверяться в различном порядке, например, от наименьшей тестовой частоты к наибольшей, или от наибольшей тестовой частоты к наименьшей, или продвигаясь от середины диапазона в оба конца.
Для каждой возможной частоты ASFR дискретизации, выданной блоком RCTRLU управления передискретизатором, вызывается передискретизатор RS, а затем функция WMDF ВЗ-декодера. Соответствующее значение CONF достоверности, выданное ВЗ-декодером, сохраняется в RCTRLU. В случае, если значение CONF достоверности оказалось меньше заданного первого порогового значения, тестируется следующая по порядку возможная частота, и так далее пока не будет протестирован весь диапазон частот. После этого весь диапазон частот снова ищут или тестируют, или сканируют на основе кадра принимаемого сигнала RWAS для нахождения подходящей частоты дискретизации. Максимальное число повторений этого цикла задано вторым пороговым значением, например до 50 повторений, таким образом, каждая возможная частота дискретизации тестируется по нескольку раз в разные моменты времени. В случае, если значение CONF достоверности для текущей возможной частоты ASFR оказывается равным первому пороговому значению или превосходит его, эта текущая частота считается правильной частотой дискретизации, режим поиска завершается и происходит переход в нормальный, т.е. синхронизированный режим.
Для каждой тестируемой частоты полученные для нее значения достоверности в различных повторениях цикла (вплоть до 50 повторений) суммируются или комбинируются. Находятся максимум и второй максимум среди всех полученных суммарных значений достоверности. Как только отношение этих двух суммарных значений оказывается больше третьего порогового значения, или когда, например, разность между этими двумя суммарными значениями оказывается больше третьего порогового значения, поиск может быть остановлен и возможная частота дискретизации, соответствующая максимальному суммарному значению достоверности, выбирается для использования в нормальном (синхронизированном) режиме. В противном случае поиск продолжается вплоть до достижения максимального числа циклов или до момента, когда значение достоверности окажется равным или большим первого порогового значения, затем следует переход в нормальный режим.
Альтернативно, в случае если достигается максимальное число повторений цикла, отношение или разность сравнивается с третьим пороговым значением, и если оказывается ниже третьего порогового значения, то режим поиска продолжается.
Операции сохранения и вычисления выполняются в блоке RCTRLU управления передискретизатором.
Продолжение работы в нормальном (синхронизированном) режиме
Выбранная в режиме поиска частота дискретизации используется в нормальном режиме как рабочая частота ASFR дискретизации для передискретизатора RS.
Необязательно, выполняется (время от времени или непрерывно) тестирование некоторого заданного числа смежных частот дискретизации, расположенных выше и ниже выбранной частоты дискретизации, чтобы учесть небольшие изменения частоты дискретизации входного аудио-сигнала RWAS, которые могут быть следствием тепловых явлений или эффекта Допплера (появляющегося при изменениях расстояния от динамика до микрофона). Интервал между тестируемыми возможными частотами может здесь быть сделан другим, чем в режиме поиска, и при этом уменьшающимся со временем, с целью как можно более точного определения правильной частоты дискретизации.
При работе в нормальном режиме постоянно подсчитывается сумма заданного количества последних значений CONF достоверности, выдаваемых WMDF вместе с битами INFB ВЗ-информации, и таким образом контролируется текущий максимум суммарного значения достоверности с целью обнаружения существенных изменений правильной частоты дискретизации. Это заданное количество последних значений может отличаться от максимального числа циклов для режима поиска. Если текущее суммарное значение достоверности оказывается меньше четвертого порогового значения, то блок RCTRLU управления передискретизатором завершает, покидает нормальный режим и возвращается в режим поиска. В этом случае последняя «правильная» частота дискретизации может быть сохранена и использована как стартовая частота для вновь начатого режима поиска, с тем чтобы сохранить небольшое время поиска в случаях, когда аудио-сигнал лишь прервался на короткое время, но при этом не изменилась частота дискретизации.
Операции сохранения и вычисления производятся блоком RCTRLU управления передискретизатором.
Обработка данных в соответствии с настоящим изобретением выполняется в реальном времени так, что каждый цикл сканирования всех возможных частот или некоторой их части выполняется в другой части или кадре входного ВЗ-маркированного сигнала RWAS. Можно, однако, рассматривать и такой вариант, когда ВЗ-маркированный сигнал RWAS сохраняется как файл данных, к которому затем применятся обработка в соответствии с изобретением.
На блок-схеме ВЗ-декодера, изображенной на фиг. 2, принимающий блок RSU представляет все шаги или этапы, изображенные на фиг. 1, кроме ВЗ-декодера или функции WMDF декодера. После того, как входной ВЗ-маркированный сигнал RWAS прошел через шаг или блок RSU, где он был передискретизирован, он может затем пройти предварительную обработку на шаге или этапе PRPR, которая может включать в себя формирование спектра и/или отбеливание и/или обратное частотное преобразование. На следующем шаге или этапе CORR корреляции, выполняется корреляция часть за частью с одним или несколькими эталонными образцами REFP. На шаге принятия решения или этапе DC определяется наличие или отсутствие пика в полученных результатах корреляции (например, сравнивая максимальную положительную или отрицательную амплитуду полученных результатов корреляции с подходящим пороговым значением) и выводится из определенности этого пика (т.е. насколько он отличается от шума и от меньших пиков полученной корреляции), соответствующее значение достоверности. На необязательном шаге или этапе ERRC последующей корректировки предварительно определенные биты INFB ВЗ-информации могут быть подвергнуты исправлению ошибок, с получением скорректированных бит CINFB ВЗ-информации.
Настоящее изобретение применимо во всех областях техники, где корреляция может быть нарушена феноменами типа эха и реверберации, например при декодировании ВЗ-маркированного видеосигнала, который был перцепционно закодирован.
Изобретение относится к вычислительной технике. Технический результат заключается в правильном определении частоты дискретизации для декодирования информации водяного знака, встроенной в принятый искаженный сигнал. Способ определения и использования частоты дискретизации для декодирования информации водяного знака, встроенной в принимаемый сигнал, дискретизированный с исходной частотой дискретизации на стороне кодера, причем упомянутое декодирование включает в себя корреляцию, по меньшей мере, с одним эталонным образцом, в котором в режиме поиска: многократно сканируют возможные частоты дискретизации в диапазоне частот, таким образом декодируя водяной знак; определяют максимум и второй максимум среди суммарных значений достоверности; причем, как только их отношение или их разность оказывается больше второго порогового значения, или когда достигается максимальное число циклов сканирования, выходят из упомянутого режима поиска и входят в упомянутый нормальный режим, где принимают выбранную возможную частоту дискретизации в качестве исходной частоты дискретизации и декодируют водяной знак принятого сигнала часть за частью или кадр за кадром с использованием выбранной возможной частоты дискретизации. 2 н. и 16 з.п. ф-лы, 2 ил.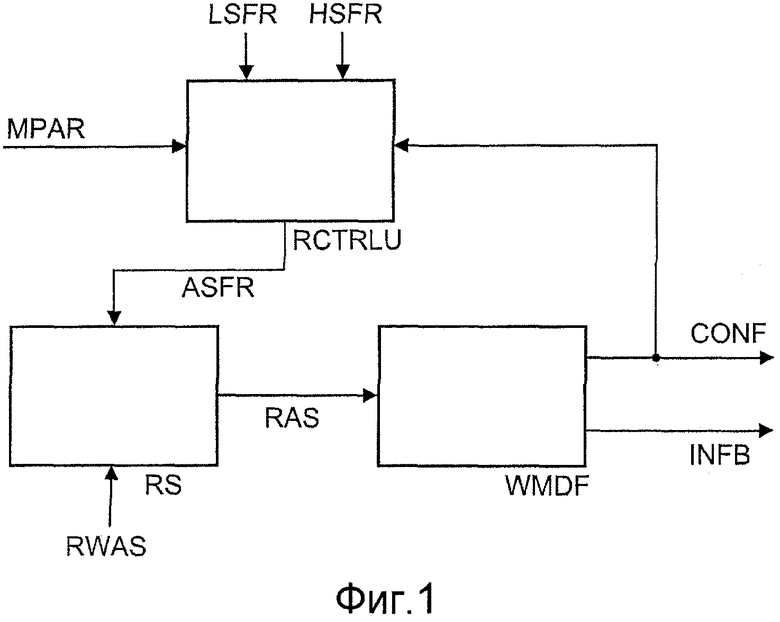
1. Способ определения и использования частоты дискретизации для декодирования информации водяного знака, встроенной в принимаемый сигнал, дискретизированный с исходной частотой дискретизации на стороне кодера, причем упомянутое декодирование включает в себя корреляцию, по меньшей мере, с одним эталонным образцом, причем способ содержит этапы, на которых
в режиме поиска
для последовательных частей или кадров упомянутого принятого сигнала многократно сканируют возможные частоты дискретизации в диапазоне частот, включающем в себя упомянутую исходную частоту дискретизации, таким образом декодируя водяной знак, с использованием этих возможных частот дискретизации, соответствующей части или кадра упомянутого принятого сигнала,
причем для каждой возможной частоты дискретизации, использованной при декодировании водяного знака, определяют соответствующее битовое значение достоверности водяного знака, полученное из упомянутой корреляции, и суммируют или комбинируют значения достоверности для каждой из возможных частот дискретизации,
причем, как только значение достоверности текущей возможной частоты дискретизации оказывается большим или равным первому пороговому значению, выходят из режима поиска и входят в нормальный режим с этой выбранной возможной частотой дискретизации;
определяют максимум и второй максимум среди суммарных значений достоверности, причем, как только их отношение или их разность оказывается больше второго порогового значения или когда достигается максимальное число циклов сканирования, выходят из упомянутого режима поиска и входят в упомянутый нормальный режим, выбрав возможную частоту дискретизации, которая связана с упомянутым максимальным суммарным значением достоверности, или, когда достигается упомянутое максимальное число циклов сканирования, вычисляют, превосходит ли упомянутое отношение или упомянутая разность упомянутое второе пороговое значение, и если нет, то продолжают режим поиска;
в нормальном или синхронизированном режиме
принимают упомянутую выбранную возможную частоту дискретизации в качестве упомянутой исходной частоты дискретизации и декодируют водяной знак упомянутого принятого сигнала часть за частью или кадр за кадром с использованием упомянутой выбранной возможной частоты дискретизации.
2. Способ по п.1, в котором в упомянутом нормальном режиме постоянно суммируют или комбинируют предварительно заданное количество последних значений достоверности, и результирующее суммарное значение сравнивают с третьим пороговым значением для того, чтобы распознать изменение правильной частоты дискретизации, и в котором, если соответствующее суммарное значение достоверности оказывается меньше упомянутого третьего порогового значения, то выходят из нормального режима и повторно входят в режим поиска.
3. Способ по п.2, в котором последнюю частоту дискретизации, использованную в упомянутом нормальном режиме, используют при повторном вхождении в режим поиска в качестве частоты дискретизации, с которой начинают упомянутое сканирование.
4. Способ по любому из пп.1-3, в котором в упомянутом нормальном режиме предварительно заданное количество смежных возможных частот дискретизации выше и ниже упомянутой выбранной частоты дискретизации используют для упомянутого декодирования водяного знака, чтобы учесть небольшие изменения частоты дискретизации входного аудио-сигнала.
5. Способ по п.4, в котором интервал между возможными частотами может быть другим, чем в режиме поиска, и который уменьшают со временем.
6. Способ по любому из пп.1-5, в котором упомянутое битовое значение достоверности водяного знака является высоким, когда значение бита информации является достоверным, и является низким, когда значение бита информации является недостоверным.
7. Способ по любому из пп.1-6, в котором принятый сигнал перед упомянутой корреляцией подвергают формированию спектра, и/или отбеливанию, и/или обратному частотному преобразованию.
8. Способ по любому из пп.1-7, в котором упомянутый маркированный водяным знаком сигнал сохраняют в виде файла данных.
9. Способ по п.8, в котором цикл сканирования возможной частоты выполняют только один раз.
10. Устройство для определения и использования частоты дискретизации для декодирования информации водяного знака, встроенной в принятый сигнал, дискретизированный с исходной частотой дискретизации на стороне кодера, причем упомянутое декодирование включает в себя корреляцию, по меньшей мере, с одним эталонным образцом, причем устройство содержит средства, выполненные с возможностью
в режиме поиска
для последовательных частей или кадров упомянутого принятого сигнала многократно сканировать возможные частоты дискретизации в диапазоне частот, включающем в себя упомянутую исходную частоту дискретизации, таким образом декодируя водяной знак, с использованием этих возможных частот дискретизации, соответствующей части или кадра упомянутого принятого сигнала,
причем для каждой возможной частоты дискретизации, использованной при упомянутом декодировании водяного знака, определять соответствующее битовое значение достоверности водяного знака, полученное из упомянутой корреляции, и суммировать или комбинировать значения достоверности для каждой из возможных частот дискретизации, и причем, как только значение достоверности текущей возможной частоты дискретизации оказывается большим или равным первому пороговому значению, выходить из режима поиска и входить в нормальный режим с этой выбранной возможной частотой дискретизации;
определять максимум и второй максимум среди суммарных значений достоверности, причем как только их отношение или их разность оказывается больше второго порогового значения или когда достигается максимальное число циклов сканирования, выходить из упомянутого режима поиска и входить в упомянутый нормальный режим, выбрав возможную частоту дискретизации, которая связана с упомянутым максимальным суммарным значением достоверности, или, когда достигается упомянутое максимальное число циклов сканирования, вычислять, превосходит ли упомянутое отношение или упомянутая разность упомянутое второе пороговое значение, и если нет, то продолжать режим поиска;
в нормальном или синхронизированном режиме
принимать упомянутую выбранную возможную частоту дискретизации в качестве упомянутой исходной частоты дискретизации и декодировать водяной знак упомянутого принятого сигнала часть за частью или кадр за кадром с использованием упомянутой выбранной возможной частоты дискретизации.
11. Устройство по п.10, в котором в упомянутом нормальном режиме постоянно суммируют или комбинируют предварительно заданное количество последних значений достоверности, и результирующее суммарное значение сравнивают с третьим пороговым значением для того, чтобы распознать изменение правильной частоты дискретизации, и в котором, если соответствующее суммарное значение достоверности оказывается меньше упомянутого третьего порогового значения, то выходят из упомянутого нормального режима и повторно входят в режим поиска.
12. Устройство по п.11, в котором последнюю частоту дискретизации, использованную в упомянутом нормальном режиме, используют при повторном вхождении в режим поиска в качестве частоты дискретизации, с которой начинают упомянутое сканирование.
13. Устройство по любому из пп.10-12, в котором в упомянутом нормальном режиме предварительно заданное количество смежных возможных частот дискретизации выше и ниже упомянутой выбранной частоты дискретизации используют для упомянутого декодирования водяного знака, чтобы учесть небольшие изменения частоты дискретизации входного аудиосигнала.
14. Устройство по п.13, в котором интервал между возможными частотами может быть другим, чем в режиме поиска, и который уменьшают со временем.
15. Устройство по любому из пп.10-14, в котором упомянутое битовое значение достоверности водяного знака является высоким, когда значение бита информации является достоверным, и является низким, когда значение бита информации является недостоверным.
16. Устройство по любому из пп.10-15, в котором принятый сигнал перед упомянутой корреляцией подвергают формированию спектра, и/или отбеливанию, и/или обратному частотному преобразованию.
17. Устройство по любому из пп.10-16, в котором упомянутый маркированный водяным знаком сигнал сохраняют в виде файла данных.
18. Устройство по п.17, в котором цикл сканирования возможной частоты выполняют только один раз.
| US 6584138 B1, 24.06.2003 | |||
| US 6061793 A1, 09.05,2000 | |||
| Способ обработки струи металла при разливке | 1990 |
|
SU1764780A1 |
| US 6810078 B2, 26.10.2004 | |||
| УСТРОЙСТВО И СПОСОБ КОДИРОВАНИЯ И СОХРАНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ И ЗВУКОВЫХ СИГНАЛОВ | 2000 |
|
RU2257015C2 |
| УСТРОЙСТВО ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ДАННЫХ | 1999 |
|
RU2237934C2 |

