Изобретение относится к сейсмологии и может быть использовано при разведке и разработке залежей углеводородов.
Известна система для вибросейсмического воздействия на углеводородную залежь, которая содержит множество указанных источников, предназначенных для размещения на поверхности и/или в вертикальных, и/или наклонных, и/или горизонтальных, и/или разветвленных скважинах. Они снабжены средствами возбуждения колебаний, связанными посредством каналов связи с компьютером. Последний служит для управления последовательностью, длительностью и др. параметрами управляющих сигналов (амплитуды, частоты, фазы и т.д), а также создания продольных и поперечных волн, направлением продольных волн и полярностью поперечных волн, который в свою очередь соединен через модем с центром управления (см. патент РФ №2235863, кл. Е21В 43/16, 2004).
Недостатком известной системы является то, что они не позволяют корректировать параметры процесса проведения анализа сигналов, получаемых во время вибрационной сейсморазведки геологического объекта.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является обеспечение возможности корректировки параметров процесса проведения анализа сигналов, получаемых во время вибрационной сейсморазведки геологического объекта.
Данный технический результат достигается за счет того, что система для вибрационной сейсморазведки геологического объекта содержит, по меньшей мере, один блок управления вибраторами, которые расположены вблизи геологического объекта, и дешифратор команд управления, выходы которого подключены к входам, по меньшей мере, одного блока управления вибраторами, подключенный к блоку электропитания блок анализатора, который соединен первым, вторым, третьим, четвертым и пятым информационными входами, соответственно, с выходами накопителя на магнитной ленте, дисплея, узла клавиатуры подачи команд управления, генератора стандартных сигналов и шифратора команд управления, связанного каналом связи с дешифратором команд управления, размещенную вблизи геологического объекта сейсмостанцию, которая первыми выводами через согласующее устройство подключена к шестым информационным входам блока анализатора, а вторыми выводами связана с входами генератора стандартных сигналов.
Кроме того, блок анализатора содержит соединенные между собой системной шиной процессорный модуль, оперативное запоминающее устройство, постоянное запоминающее устройство, дисплейный модуль, коррелятор, накопитель и контроллер внешних устройств, выполненный с возможностью подключения к генератору стандартных сигналов, при этом дисплейный модуль выполнен с возможностью соединения с дисплеем, накопителем на магнитной ленте и узлом клавиатуры подачи команд управления.
Кроме того, блок анализатора выполнен с возможностью функционирования в диалоговом интерактивном режиме с возможностью обработки сигналов методами спектрально-корреляционного анализа.
Кроме того, блок анализатора может быть выполнен с возможностью обработки сигналов для представления их в графическом виде на дисплее, а также с возможностью квантования сигналов по времени, кроме того, с возможностью обработки спектров сигналов с использованием быстрого преобразования Фурье, и кроме того, с возможностью проведения частотного анализа сигналов в заранее заданном частотном диапазоне.
Сущность изобретения поясняется на фиг.1-6, где на фиг.1 представлена блок-схема системы для вибрационной сейсморазведки геологического объекта, на фиг.2 представлена блок-схема блока анализатора, на фиг.3 показан вид выводимой на экран дисплея таблицы параметров, характеризующих результаты анализа, осуществленного системой, на фиг.4 показана блок-схема алгоритма коррекции параметров функционирующей системы, на фиг.5 приведена блок-схема алгоритма работы предлагаемой системы в одном из ее режимов функционирования, на фиг.6 показан пример отображения результатов анализа сейсморазведки на экране дисплея функционирующей системы.
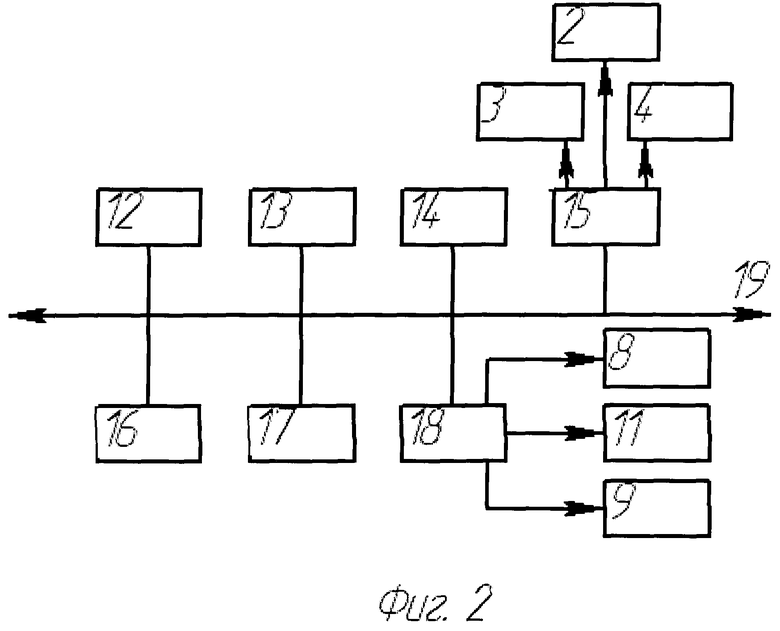
На фиг.1 и 2 обозначены блок 1 анализатора (БА), накопитель 2 на магнитной ленте (НМЛ), дисплей 3 (TV), узел 4 клавиатуры подачи команд управления (КЛ), блок 5 электропитания, шифратор 6 команд управления (Ш), дешифратор 7 команд управления (ДШ), генератор 8 стандартных сигналов (ГСР), сейсмостанция 9 (СС), согласующее устройство 10 (УС) и блок 11 управления вибраторами (БУВ), процессорный модуль 12 (ПМ), оперативное запоминающее устройство 13 (ОЗУ), постоянное запоминающее устройство 14 (ПЗУ), дисплейный модуль 15 (ДМ), коррелятор 16 (К), накопитель 17 (Н), контроллер 18 внешних устройств (КВУ) и системная шина 19.
Система для вибрационной сейсморазведки геологического объекта содержит, по меньшей мере, один блок 11 управления вибраторами, которые расположены вблизи геологического объекта, и дешифратор 7 команд управления, выходы которого подключены к входам, по меньшей мере, одного блока 11 управления вибраторами. К блоку 5 электропитания подключен блок 1 анализатора, который соединен первым, вторым, третьим, четвертым и пятым информационными входами, соответственно, с выходами накопителя 2 на магнитной ленте, дисплея 3, узла 4 клавиатуры подачи команд управления, генератора 8 стандартных сигналов и шифратора 6 команд управления, связанного каналом связи с дешифратором 7 команд управления. В систему также входит размещенная вблизи геологического объекта сейсмостанция 9, которая первыми выводами через согласующее устройство 10 подключена к шестым информационным входам блока 1 анализатора, а вторыми выводами связана со входами генератора 8 стандартных сигналов.
В блоке 1 анализатора соединены между собой системной шиной 19 процессорный модуль 12, оперативное запоминающее устройство 13, постоянное запоминающее устройство 14, дисплейный модуль 15, коррелятор 16, накопитель 17 и контроллер 18 внешних устройств, выполненный с возможностью подключения к генератору 8 стандартных сигналов. Дисплейный модуль 15 выполнен с возможностью соединения с дисплеем 3, накопителем 2 на магнитной ленте и узлом 4 клавиатуры подачи команд управления.
Предложенная система для вибрационной сейсморазведки геологического объекта работает следующим образом.
Множество источников вибрационных сейсмических колебаний (вибраторов) размещают на земной поверхности геологического объекта и/или в вертикальных и/или наклонных и/или горизонтальных и/или разветвленных скважинах в геологическом объекте. При этом вибраторы могут находиться в неподвижном состоянии или перемещаться по поверхности земли или внутри скважины.
По сигналу сейсмостанции 9 запускается генератор 8 стандартных сигналов, а через радиоканал - блоки 11 управления вибраторами, генерирующие зондирующий линейный частотно-модулированный (ЛЧМ) сигнал. Вибраторы излучают продольные и поперечные волны в направлении геологического объекта. Генератор 8 стандартных сигналов формирует отметку момента (ОМ), начиная с которого сейсмическая информация - отраженные от геологического объекта сейсмические колебания - регистрируется сейсмостанцией 9.
Одновременно регистрируемая информация через согласующее устройство 10 поступает в блок 1 анализатора для выявления частотно-зависимого затухания отраженных сигналов (сейсмических колебаний). Оператор, используя клавиатуру узла 4 и дисплей 3, предварительно выбирает для анализа интересующие его сейсмические каналы и временное окно и задает частотный диапазон (Fmin, Fmax), в котором будет работать данная система, и длину развертки (Т). В пределах установленного оператором окна рассчитывается спектр введенного в систему отраженного сейсмосигнала (сигнала), который затем сопоставляется со спектром, принятым за оптимальный (в данном случае прямоугольным). По результатам сопоставления рассчитывается нелинейный частотно-модулированный (НЛЧМ) компенсирующий сигнал. Пары чисел dF и dT, задающие его кусочно-линейную аппроксимацию, передаются в генератор 8 стандартных сигналов и через радиоканал в блоки 11 управления вибраторами для изменения характеристик излучаемых вибросейсмических колебаний.
Система на этом этапе может быть использована для контроля над спектром регистрируемого сигнала. При отклонении формы регистрируемого спектра от оптимального расчет коррекции управляющего сигнала повторяется.
Функциональная схема блока анализатора 1 изображена на фиг.2. Все функциональные узлы блока 1 связаны между собой через системную шину 19. Для связи с внешними устройствами используется контроллер 18 внешних устройств и дисплейный модуль 15. Дисплейный модуль 15 служит для связи с клавиатурой узла 4, дисплеем 3 и накопителем 2 на магнитной ленте.
Оператор во время работы с данной системой вводит параметры и режим работы системы с клавиатуры узла 4 и получает информацию о ходе ее работы (вводимые трассы коррелограмм, виброграмм, спектры, рассчитанные данные, сообщения и запросы системы). Контроллер 18 служит для связи с сейсмостанцией 9, с радиоканалом и с генератором 8 стандартных сигналов. Контроллер 18 внешних устройств принимает сейсмическую информацию и пропускает на вход накопителя 17 только информацию с выбранных оператором каналов. В накопителе 17 выполняется сложение информации разных каналов без временных сдвигов (т.е. осуществляется усреднение поступивших сигналов). Суммарная трасса поступает затем на вход коррелятора 16, если в накопитель 17 вводилась виброграмма, или непосредственно в оперативное запоминающее устройство 13, если использовался коррелятор 16 сейсмостанции 9.
С выхода коррелятора 16 или накопителя 17 записываются в оперативное запоминающее устройство 13 только те отсчеты суммарной трассы, которые попадают в заданное оператором временное окно. При этом ввод данных в оперативное запоминающее устройство 13 выполняется под управлением программы. Тестирование и настройка параметров работы процессоров коррелятора 16, накопителя 17 и контроллеров блока 1 выполняется также программным путем. Отработанные блоки программы хранятся в постоянном запоминающем устройстве 14 ПЗУ, прочие хранятся в оперативном запоминающем устройстве 13. Исполняет программу процессорный модуль 12. Введенная в оперативное запоминающее устройство 13 информация обрабатывается и с помощью контроллера 18 внешних устройств передается для исполнения в генератор 8 стандартных сигналов и через радиоканал в блоки 11 управления вибраторами.
В качестве исполнительных устройств используются генератор 8 стандартных сигналов и через радиоканал в блоки 11 управления вибраторами. Для функционирования в системе эти блоки снабжают интерфейсом связи с согласующим устройством 10, а также запоминающим устройством для хранения принятых через устройство 10 параметров аппроксимированного сигнала.
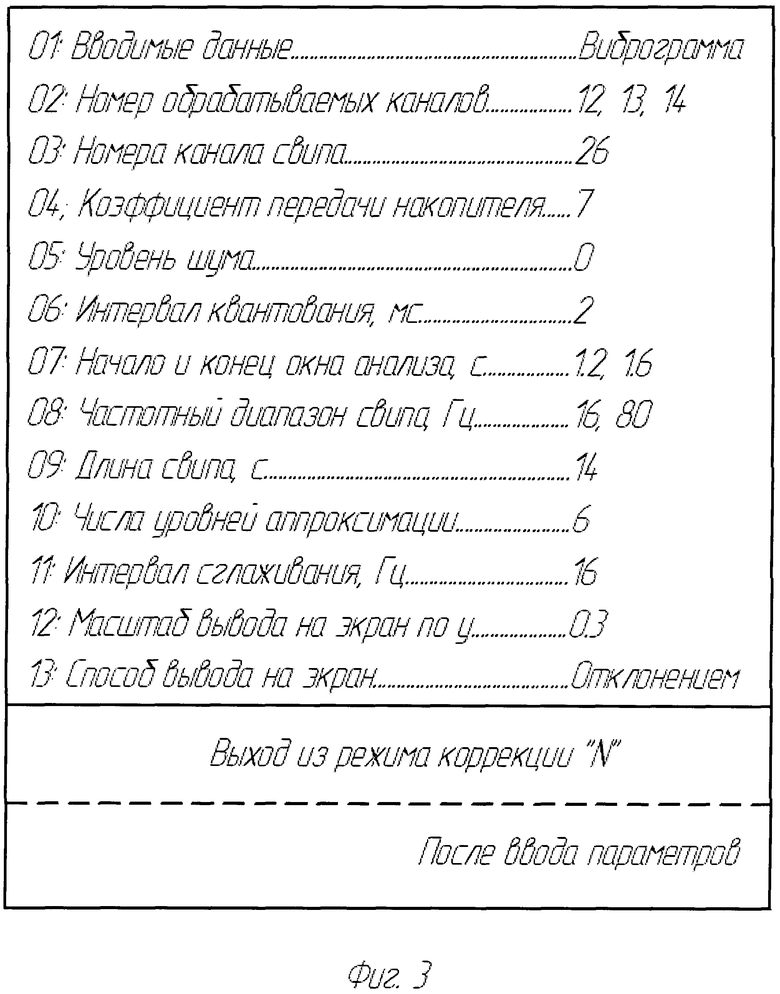
После включения питания с помощью блока 5 электропитания система выводит на экран дисплея 3 по умолчанию таблицу параметров (см. фиг.3). При этом первая строка таблицы параметров (см. фиг.3) определяет характер последующей обработки сигналов. Если вводится виброграмма, то вводимые данные перед записью в оперативное запоминающее устройство 13 обрабатываются коррелятором 16.
Вторая и третья строка таблицы (см. фиг.3) задают контроллеру 18 внешних устройств номера сейсмических каналов, данные которых подлежат обработке. Информация с выбранных каналов поступает на вход накопителя 17, где вычисляется усредненная суммотрасса. Результат суммирования может выйти за пределы разрядной сетки сумматора накопителя 17. Чтобы не было переполнения, выполняется предварительное масштабирование вводимых данных. Для этих целей служит параметр, вводимый в четвертой строке таблицы.
Пятая строка таблицы (см. фиг.3) определяет уровень случайного шума, вводимого в суммотрассу перед корреляцией. Необходимость последнего вызвана тем, что для уменьшения аппаратурных затрат коррелятор выполнен по алгоритму знаковой корреляции.
Данный алгоритм предполагает, что на выходе коррелятора 16 присутствует сигнал с соотношением сигнал/шум (рс/ш), равным рс/ш<1.
В противном случае возможны искажения выходного сигнала (т.е. искажения его спектра) типа «ограничения по амплитуде».
Шестая строка таблицы (см. фиг.3) задает интервал квантования вводимой информации по времени. Седьмая строка таблицы определяет (после соответствующего пересчета при настройке контроллера 18 внешних устройств) порядковый номер первой и последней выборок вводимой суммотрассы. В процессе анализа введенных данных параметры седьмой строки могут изменяться (в первоначально введенных границах).
Восьмая строка таблицы (см. фиг.3) определяет частотный диапазон, в котором будет анализироваться введенный сигнал. Определяемый для анализа диапазон должен находиться в границах частотного диапазона ЛЧМ сигнала. В процессе анализа параметры восьмой строки таблицы могут изменяться. По окончании анализа параметры восьмой строки определяют начальную и конечную частоты НЛЧМ сигнала.
Девятой строкой таблицы (см. фиг.3) задается его требуемая длина. Параметр десятой строки косвенным образом определяет число подынтервалов НЛЧМ сигнала. При этом следует иметь в виду, что чем больше число уровней аппроксимации, тем выше точность расчета оптимального сигнала, и чем больше подынтервалов развертки, тем больше времени занимает передача параметров НЛЧМ сигнала по радиоканалу в блоки 11 управления вибраторами.
На перечисленные выше характеристики оказывает влияние также параметр, задаваемый одиннадцатой строкой таблицы (см. фиг.3). Спектр исходного сигнала сглаживается, делается более плавным с увеличением интервала сглаживания. Тем самым снижается влияние на результат расчета сигнала величины окна анализа спектра и интерференции нескольких волн. Параметры последних двух строк таблицы определяют вывод графической информации на экран дисплея 3.
В двенадцатой строке таблицы (см. фиг.3) задается размер изображения по амплитуде в долях экрана дисплея 3. При значении параметра, равном единице, графическое изображение (спектры, трасса) будет занимать весь экран. Способ изображения (отклонение или переменная ширина) задается в последней строке таблицы
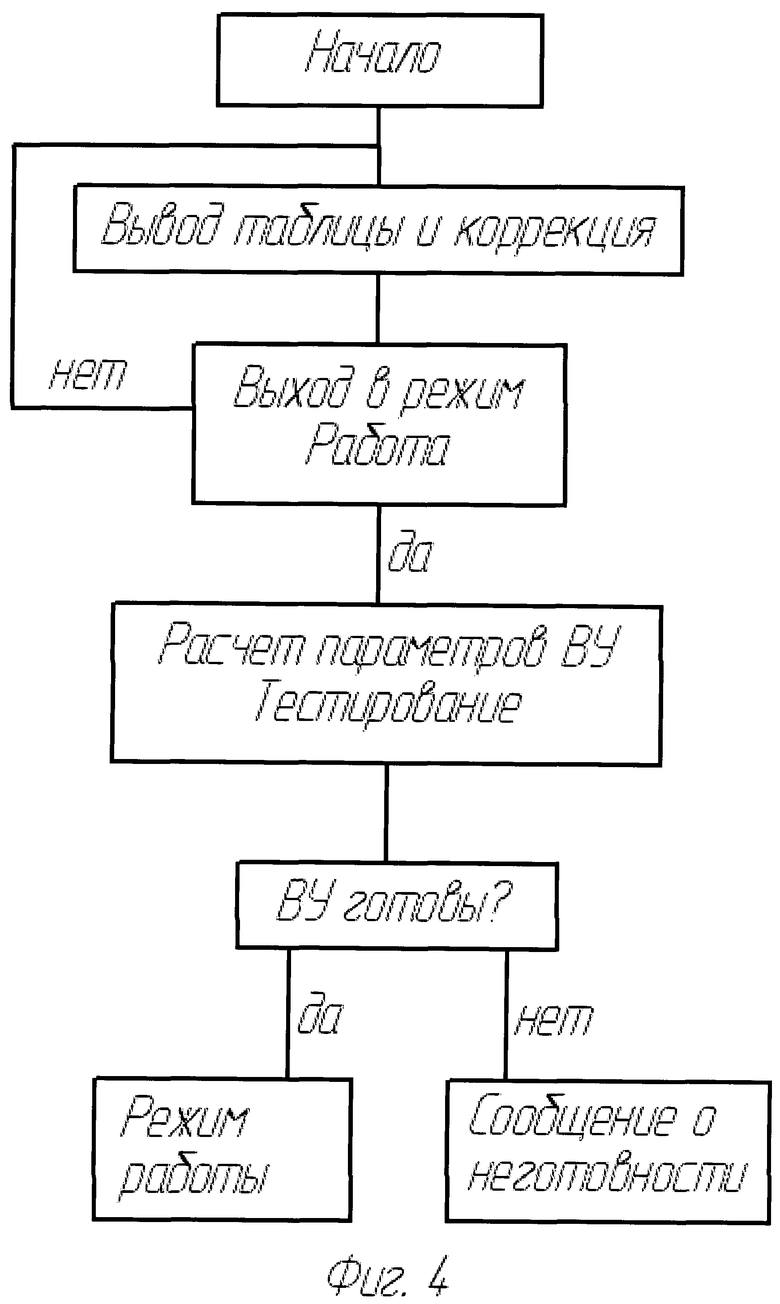
Сразу же после ввода таблицы параметров программа переходит на режим коррекции. Блок-схема алгоритма коррекции приведена на фиг.4. Для ввода нового параметра необходимо ввести номер соответствующей строки таблицы (см. фиг.3) и сам параметр. Если коррекция не требуется, программа пересчитывает введенные параметры системы и выполняет настройку внешних устройств - контроллера 18 внешних устройств, коррелятора 16 и накопителя 17. После настройки проверяется готовность внешних устройств к работе. Если все внешние устройства готовы, программа переходит в режим «Работа», и система начинает функционировать.
В противном случае на экран дисплея 3 выдается сообщение о неготовности.
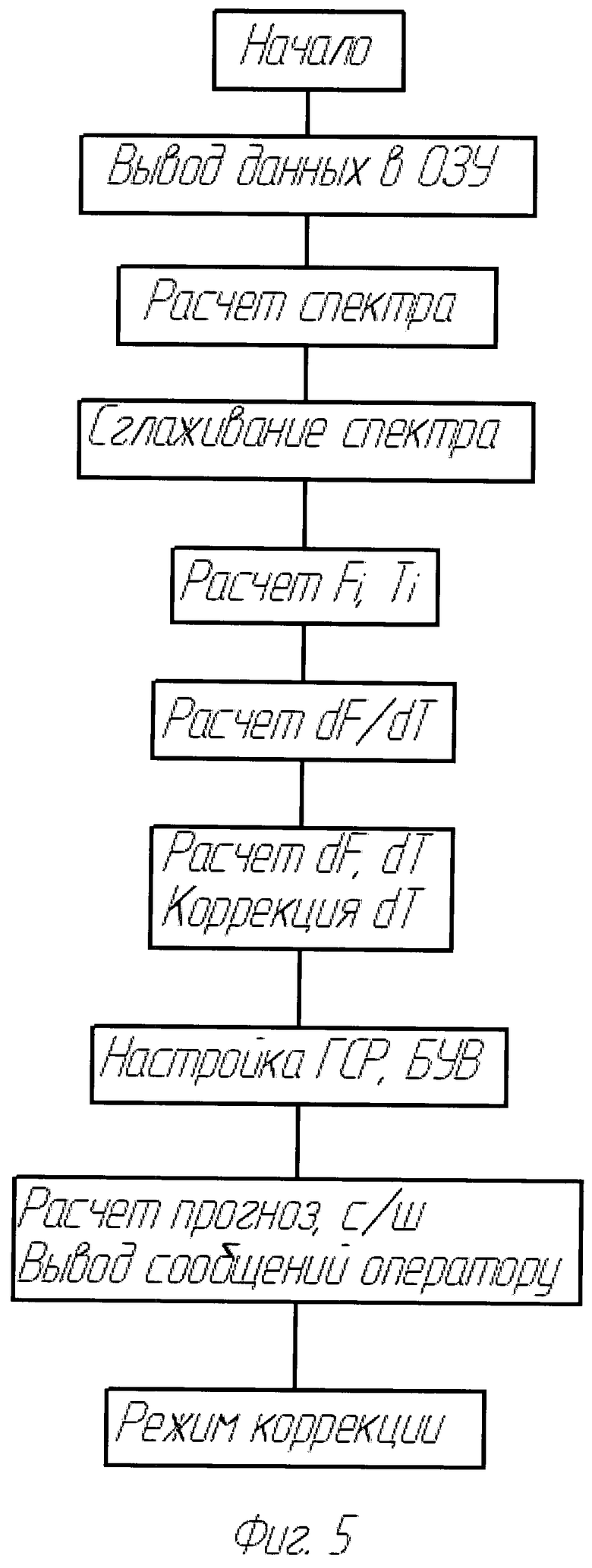
Режим «Работа» может выполняться в диалоговом режиме оператора и системы, либо по «жесткому» графику. Блок-схема алгоритма по «жесткому» графику изображена на фиг.5.
Первым этапом режима «Работа» является ввод исходной информации (суммотрассы). Как уже отмечалось выше, суммотрасса формируется процессорами системы под управлением программы. Началом ввода данных в эти процессоры является отметка момента сейсмостанцией 9. Начало ввода суммотрассы в оперативное запоминающее устройство 13 и объем вводимых данных определяются параметрами временного окна анализа. Следующим этапом работы является расчет спектра, выполняемого по алгоритму быстрого преобразования Фурье (БПФ). Рассчитанный спектр сглаживается, и результат расчета используется для нахождения граничных точек Fi, Ti интервалов кусочно-линейной аппроксимации НЛЧМ сигнала. По полученным Fi, Ti рассчитываются параметры интервалов dF, dT, необходимые для задания параметров НЛЧМ сигнала генератору стандартных сигналов 8 блокам управления вибраторами 11. Во всех рассчитанных интервалах находится скорость развертки dF/dT.
Найденные скорости разверток сравниваются с предельно допустимой для данного типа вибраторов. Если в каком-либо интервале рассчитанная скорость превышает допустимую, то соответствующее время интервала Тi увеличивается с тем, чтобы расчетная скорость сравнялась с допустимой. Рассчитанные параметры НЛЧМ сигнала передаются по радиоканалу в блоки 11 управления вибраторами и в генератор 8 стандартных сигналов для отработки и оператору на экран дисплея 3 для контроля. Кроме того, рассчитывается ожидаемое ухудшение соотношения сигнал/ шум вследствие перераспределения излучаемой энергии относительно зондирующего сигнала, которое тоже сообщается оператору. После этого программа вновь переходит в режим коррекции параметров.
Кроме того, в диалоговом режиме после выполнения каждого этапа обработки программа выводит результаты обработки в графическом виде и, запрашивая оператора о необходимости выполнения этапа с новыми параметрами, переходит в режим коррекции параметров. После их коррекции программа возвращается к выполнению прерванного этапа. При отказе от коррекции параметров программа переходит к выполнению следующего этапа обработки.
Таким образом, в процессе работы данной системы в диалоговом режиме можно контролировать форму введенного в оперативное запоминающее устройство 13 сигнала, уточнять временные параметры окна анализа (рассматриваемый участок суммотрассы растягивается во весь экран), изменять параметры сглаживания и разбиения на интервалы аппроксимации, контролируя количество и расположение точек Fi, изменять начальную и конечную частоты рассчитываемого НЛЧМ сигнала для достижения наилучшей разрешенности при наименьшем ухудшении отношения рс/ш, корректировать его длительность и рассчитывать прогнозируемый спектр регистрируемого сигнала.
Следует отметить, что возможности системы могут быть расширены.
В соответствии с принятой схемой данная система может реализовывать следующие операции.
Полевые наблюдения начинают с возбуждения одиночным или группой вибраторов начального или «калибровочного» воздействия. Параметры его выбирают исходя из результатов предыдущих или опытных работ. Желательно, чтобы частотный диапазон калибровочного воздействия был достаточно большим с тем, чтобы оценить уровень сигналов в широкой полосе частот.
Зарегистрированные в ближней и дальней от вибраторов зонах колебания анализируются и определяются спектральные характеристики волн. Возможно суммирование трасс для повышения надежности выделенных сигналов и отношения сигнал/помеха (сигнал/шум). При этом данная система обеспечивает широкие возможности по выбору анализируемых колебаний. Это могут быть сигналы с плиты вибратора или в ближней от него зоне, отраженные или преломленные волны в любом временном окне и на любых удалениях в пределах расстановки сейсмоприемников. Анализ может проводиться по виброграммам и коррелограммам.
Широкий набор сигналов для анализа позволяет учитывать: резонансный характер системы плита - грунт, изменение условий передачи нагрузок и упругих свойств в грунтах на каждом пункте возбуждения или по профилю, а также поглощения волн.
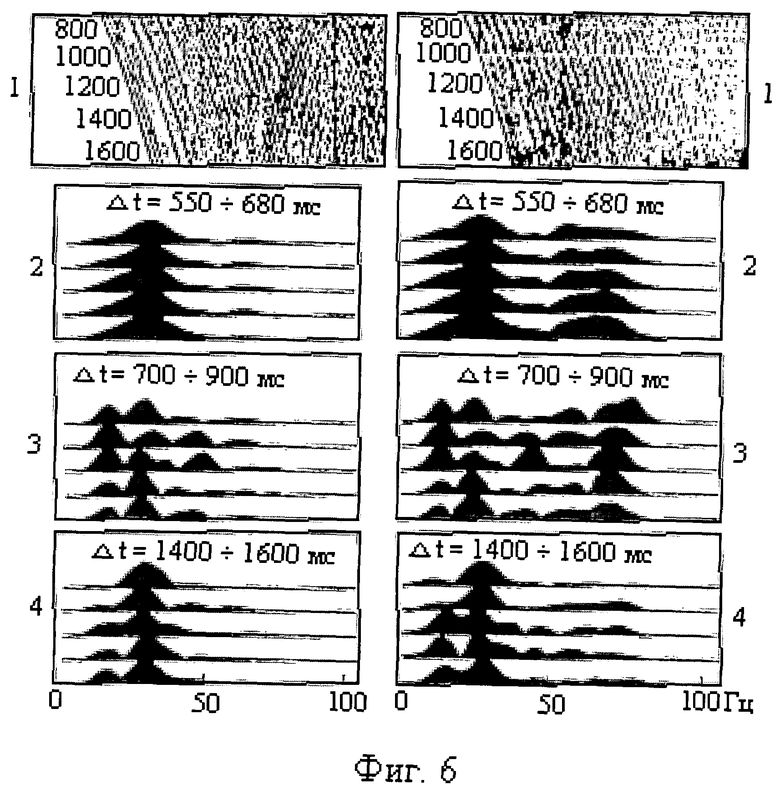
На основании полученных данных система автоматически определяет дефект частот и рассчитывает по заложенному алгоритму кусочно-непрерывный управляющий сигнал с переменной скоростью развертки, направленный на насыщение разреза колебаниями требуемого частотного состава. Закодированные параметры управляющего сигнала система передает на пункт возбуждения для последующей обработки группой вибраторов. Этот же сигнал запоминается сейсмостанцией 9 для последующей корреляционной обработки. Один из многих примеров получения результата при использовании предлагаемых способа и системы представлен на фиг.6, которая иллюстрирует, каким образом результаты анализа сейсморазведки выглядят на экране дисплея 3 функционирующей системы. При этом на фиг.6 показаны результаты вибросейсморазведки при работах в пределах Прикаспийской впадины. Для монтажа трасс и спектры волн приняты следующие обозначения:
А - калибровочный линейный сигнал (16-80 Гц, Т-14 сек);
Б - корректирующий кусочно-непрерывный нелинейный сигнал.
Кроме этого приняты следующие обозначения: 1 - результат монтажа схем, амплитудные спектры волн (в результате анализа):
2 - прямой волны (0,55-0,68 сек);
3 и 4 - отраженных волн (в интервалах времен 0,7-0,9 сек и 1,4-1,5 сек, соответственно).
Для функционирования аппаратуры геофизик должен задать начальное и конечное время окна анализа, номера трасс, частотный диапазон и длительность анализируемых сигналов. Все эти параметры, вместе взятые, позволяют производить коррекцию.
Система также допускает многоразовую коррекцию в процессе отработки профиля при резких изменениях поверхностных или глубинных сейсмогеологических условий.
Конструктивно основное устройство системы - блок 1 анализатора выполнен в виде законченного блока размером 120×320×300 мм на шести платах размером 235×220 мм. Разбивка составных частей данного блока по платам соответствует функциональному разбиению. В состав блока 1 анализатора входит также съемный блок электропитания 5 размером 120×320×300 мм. Потребляемая мощность блока анализатора 1-24В×4А. Масса блока 1 анализатора с блоком 5 электропитания - 9,5 кг.
Блоки 11 управления вибраторами подключаются к блоку 1 анализатора через радиоканал, состоящий из шифратора 6 команд управления и дешифратора 7 команд управления и радиостанций. Сейсмостанция 9 подключается к блоку 1 анализатора через согласующее устройство 10. Подключение выполняется на уровне разъемов. Такое подключение позволяет считывать информацию не только во время регистрации на ленту, но и во время воспроизведения с ленты, используя по необходимости просмотровой коррелятор станции.
Использование данного изобретения позволяет расширить функциональные возможности системы за счет обеспечения корректировки параметров процесса проведения анализа сигналов, получаемых во время вибрационной сейсморазведки геологического объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2015 |
|
RU2593782C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2016 |
|
RU2627549C1 |
| СИСТЕМА ПОДВОДНОЙ СЕЙСМОРАЗВЕДКИ НА МОРЕ | 2020 |
|
RU2755001C1 |
| Сейсмическая станция | 1979 |
|
SU881568A1 |
| СЕЙСМОРАЗВЕДОЧНЫЙ КОМПЛЕКС | 2012 |
|
RU2488847C1 |
| СПОСОБ ВИБРОСЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2143713C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2562748C1 |
| УСТРОЙСТВО ДЛЯ ВИБРОСЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1991 |
|
RU2014638C1 |
| СЕЙСМИЧЕСКАЯ СТАНЦИЯ С БЛОКОМ РЕЧЕВОГО СОПРОВОЖДЕНИЯ, ИСПОЛЬЗУЮЩИМ ПРИНЦИП ДЕЛЬТА-МОДУЛЯЦИИ | 2007 |
|
RU2339055C1 |
| Система для сейсмической разведки | 1982 |
|
SU1056098A1 |
Изобретение относится к области геофизики и может быть использовано при разведке и разработке залежей углеводородов. Заявлена система для вибрационной сейсморазведки геологического объекта, содержащая по меньшей мере один блок 11 управления вибраторами, которые расположены вблизи геологического объекта, и дешифратор 7 команд управления, выходы которого подключены к входам по меньшей мере одного блока 11 управления вибраторами. Система также содержит подключенный к блоку 5 электропитания блок 1 анализатора, который соединен первым, вторым, третьим, четвертым и пятым информационными входами, соответственно, с выходами накопителя 2 на магнитной ленте, дисплея 3, узла 4 клавиатуры подачи команд управления, генератора 8 стандартных сигналов и шифратора 6 команд управления, связанного каналом связи с дешифратором 7 команд управления. В систему входит размещенная вблизи геологического объекта сейсмостанция 9, которая первыми выводами через согласующее устройство 10 подключена к шестым информационным входам блока 1 анализатора, а вторыми выводами связана с входами генератора 8 стандартных сигналов. Техническим результатом изобретения является повышение точности данных вибрационной сейсморазведки геологического объекта. 6 з.п. ф-лы, 6 ил.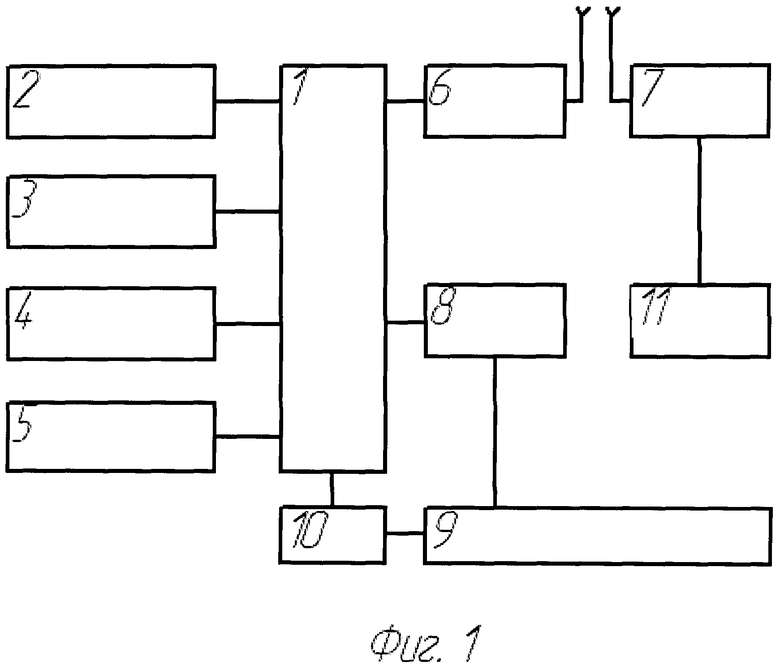
1. Система для вибрационной сейсморазведки геологического объекта, содержащая, по меньшей мере, один блок управления вибраторами, предназначенными для размещения вблизи геологического объекта, и дешифратор команд управления, выходы которого подключены к входам, по меньшей мере, одного блока управления вибраторами, подключенный к блоку электропитания блок анализатора, который соединен первым, вторым, третьим, четвертым и пятым информационными входами соответственно с выходами накопителя на магнитной ленте, дисплея, узла клавиатуры подачи команд управления, генератора стандартных сигналов и шифратора команд управления, связанного каналом связи с дешифратором команд управления, размещенную вблизи геологического объекта сейсмостанцию, которая первыми выводами через согласующее устройство подключена к шестым информационным входам блока анализатора, а вторыми выводами связана с входами генератора стандартных сигналов.
2. Система по п.1, отличающаяся тем, что блок анализатора содержит соединенные между собой системной шиной процессорный модуль, оперативное запоминающее устройство, постоянное запоминающее устройство, дисплейный модуль, коррелятор, накопитель и контроллер внешних устройств, выполненный с возможностью подключения к генератору стандартных сигналов, при этом дисплейный модуль выполнен с возможностью соединения с дисплеем, накопителем на магнитной ленте и узлом клавиатуры подачи команд управления.
3. Система по п.1, отличающаяся тем, что блок анализатора выполнен с возможностью функционирования в диалоговом интерактивном режиме с возможностью обработки сигналов методами спектрально-корреляционного анализа.
4. Система по п.1, отличающаяся тем, что блок анализатора выполнен с возможностью обработки сигналов для представления их в графическом виде на дисплее.
5. Система по п.1, отличающаяся тем, что блок анализатора выполнен с возможностью квантования сигналов по времени.
6. Система по п.1, отличающаяся тем, что блок анализатора выполнен с возможностью обработки спектров сигналов с использованием быстрого преобразования Фурье.
7. Система по п.1, отличающаяся тем, что блок анализатора выполнен с возможностью проведения частотного анализа сигналов в заранее заданном частотном диапазоне.
| US 4598392 А, 01.07.1986 | |||
| СПОСОБ ВИБРОСЕЙСМИЧЕСКОГО ВОЗДЕЙСТВИЯ НА УГЛЕВОДОРОДНУЮ ЗАЛЕЖЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2235863C2 |
| US 5347494 A, 13.09.1994 | |||
| US 4512001 A, 16.04.1985 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 5410517 A, 25.04.1995. | |||

