Изобретение относится к ракетам «земля-воздух» и «воздух-воздух».
Известна подвижная головка самонаведения (далее ГСН), содержащая оптическую и инфракрасную цифровые фотокамеры и осуществляющая дискриминацию ложных целей и наводящая ракету по опережающей траектории с переносом точки попадания с сопла на фюзеляж, см. патент RU 2400690. Недостатками этой ГСН является то, что возможно случайное поражение своего или гражданского самолета, и то, что попадание ракеты осуществляется не в самое уязвимое место самолета.
С целью устранения этих недостатков ГСН кроме вышеупомянутых элементов имеет прибор ночного видения, сигнал с которого поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов, и после идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели, причем на цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям прибора ночного видения.
ГСН также может дополнительно иметь пассивный или активный радиолокатор и/или автопилот, сигналы с которых поступают в компьютер.
Идентификация цели по радиоответчику не производится, так как при современных радиотехнических средствах его сигнал можно имитировать, что сделает вражеский самолет неуязвимьм.
Если на стороне противника воюют некоторые самолеты отечественного производства или если противник использует гражданские самолеты, то извлечение их изображений из памяти компьютера может быть заблокировано.
Под «самолетом» понимаются все летательные аппараты: вертолеты, дирижабли, крылатые ракеты, боеголовки баллистических ракет и т.п.
Прибор ночного видения имеет диапазон автоматической регулировки усиления (АРУ), позволяющий различать цели и днем.
Для облегчения идентификации целей на фоне земли, особенно целей, имеющих камуфляжную окраску, компьютер имеет программу сравнения двух или более соседних кадров прибора ночного видения с удалением элементов изображения, не совпадающих на этих кадрах. После такой обработки меняющееся изображение земли полностью или частично самоликвидируется и останется почти не изменившееся изображение самолета.
Для исключения влияния раскраски самолета идентификация целей осуществляется только по контуру самолета. Возможен и другой способ - идентификация осуществляется по кадрам инфракрасной камеры (раскраска в этом случае почти не имеет значения), но это изображение будет зависеть от скорости самолета, то есть от аэродинамического нагрева. Не говоря уже о погоде.
Если цель не идентифицирована с заданной достоверностью, допустим, с вероятностью 95%, ни с одним из имеющихся в памяти компьютера самолетов, то она поступает в разряд разрешенных к поражению.
Если цель идентифицируется как свой или гражданский самолет, то компьютером подается команда на изменение направления полета (лучше вверх, чтобы не столкнуться с землей на бреющем полете) и осуществляется самостоятельный поиск цели путем отклонения головки (например, движением по спирали) или осуществляется перенацеливание на одну из целей, математические модели которых имеются в памяти компьютера.
Если цель идентифицируется как вражеская и включилось управление по прибору ночного видения или по инфракрасной камере, то компьютер отключает систему переноса точки попадания с сопла на фюзеляж (систему опережения), если таковая имелась в ГСН, так как наведение осуществляется в самую уязвимую точку самолета. Если цель находится в сплошной облачности, то система не отключится.
На эскизе показана блок-схема ГСН ракеты среднего радиуса действия, где: ОФК - оптическая цифровая фотокамера, ИФК - инфракрасная цифровая фотокамера, имеющая одинаковую и синхронизированную развертку, ППС - блок порогового пропускания сигнала, ВИП - блок выключения пикселей инфракрасной камеры, ЭКУ - электронный ключ управления, ЛЗ - линия задержки, РЛС - радиолокатор, ПНВ - прибор ночного видения, К - компьютер.
Ракета дальнего радиуса действия дополнительно будет иметь автопилот, а ракета ближнего радиуса действия может не иметь радиолокатора, но автопилот может иметь.
Работает ГСН так: на больших дальностях наведение осуществляется по РЛС. При сближении до соответствующей дальности происходит обнаружение цели инфракрасной камерой и наведение осуществляется по двум сигналам, что повышает помехозащищенность.
При попадании в поле зрения оптической камеры тепловой ловушки ее яркий сигнал преодолевает блок порогового пропускания и с помощью блока выключения инфракрасных пикселей ВИП «вырезает» на сигнале инфракрасной камеры черное пятно в это месте. В результате чего ГСН не реагирует на тепловые ловушки.
При попытке противника выдать свой самолет за ложную цель, искусственно увеличив его оптическую светимость, пропадает сигнал с ИФК и электронный ключ ЭКУ через линию задержки ЛЗ отключает блок ВИП. Цель опять становится видимой в инфракрасном диапазоне. Процесс пульсирующее повторяется, что не мешает наведению.
На дистанциях надежного различения контуров цели прибор ночного видения или инфракрасная камера подают изображение цели в компьютер, где контур цели сравнивается с имеющимся в памяти. Компьютер выдает в систему управления рулями (не показана) сигнал о наведении на цель или об изменении курса и поиске другой цели.
При поражении осуществляется наведение в заранее заданную наиболее уязвимую точку данного самолета, например в центроплан. При этом система переноса точки попадания с сопла на фюзеляж (система опережения) отключатся компьютером.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| Двухрежимная головка самонаведения | 2017 |
|
RU2661504C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| Способ парного пуска противосамолётных ракет | 2016 |
|
RU2625135C1 |
| ПЕРЕНОСНОЙ ЗЕНИТНО-РАКЕТНЫЙ КОМПЛЕКС /ВАРИАНТЫ/ | 2012 |
|
RU2514324C1 |
| ПРОТИВОВЕРТОЛЕТНАЯ И ПРОТИВОСТЕЛСОВАЯ РАКЕТА | 2009 |
|
RU2443968C2 |
| Баллистическая платформа с анти-противоракетами | 2017 |
|
RU2646183C1 |
| Крылатая ракета (варианты) | 2016 |
|
RU2622274C1 |
| ПЕРЕНОСНОЙ ЗЕНИТНО-РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2593532C1 |
| Авиационная ракета | 2017 |
|
RU2661490C1 |
Комплексная головка самонаведения содержит оптическую и инфракрасную цифровые фотокамеры, пассивный или активный радиолокатор, автопилот, блок порогового пропускания сигнала оптической фотокамеры, блок выключения инфракрасных пикселей, электронный ключ, линию задержки и прибор ночного видения. Сигнал с прибора ночного видения или с инфракрасной камеры поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов. После идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели. На цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям прибора ночного видения или инфракрасной камеры. 2 н. и 7 з.п. ф-лы, 1 ил.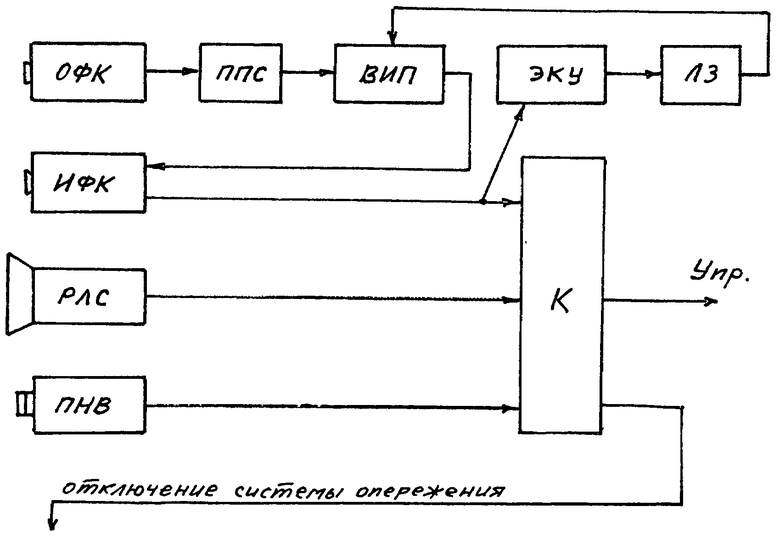
1. Комплексная головка самонаведения, содержащая оптическую и инфракрасную цифровые фотокамеры, блок порогового пропускания сигнала оптической фотокамеры, блок выключения инфракрасных пикселей, электронный ключ и линию задержки, отличающаяся тем, что имеет прибор ночного видения, сигнал с которого поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов, и после идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели, причем на цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям прибора ночного видения.
2. Головка по п.1, отличающаяся тем, что прибор ночного видения имеет диапазон автоматической регулировки усиления, позволяющий различать цели и днем.
3. Головка по п.1, отличающаяся тем, что компьютер имеет программу сравнения двух или более соседних кадров прибора ночного видения с удалением элементов изображения, не совпадающих на этих кадрах.
4. Головка по п.1, отличающаяся тем, что идентификация целей осуществляется только по контуру самолета.
5. Головка по п.1, отличающаяся тем, что если цель не идентифицирована с заданной достоверностью ни с одним из имеющихся в памяти компьютера самолетов, то она поступает в разряд разрешенных к поражению.
6. Головка по п.1, отличающаяся тем, что компьютер имеет следующую программу: если цель идентифицируется как свой или гражданский самолет, то компьютером подается команда на изменение направления полета и осуществляется самостоятельный поиск цели путем отклонения головки, или осуществляется перенацеливание на одну из целей, математические модели которых имеются в памяти компьютера.
7. Головка по п.1, отличающаяся тем, что компьютер имеет следующую программу: если включилось управление по прибору ночного видения, то компьютер отключает систему переноса точки попадания с сопла на фюзеляж (систему опережения), если она имелась на ракете.
8. Комплексная головка самонаведения, содержащая оптическую и инфракрасную цифровые фотокамеры, блок порогового пропускания сигнала оптической фотокамеры, блок выключения инфракрасных пикселей, электронный ключ и линию задержки, отличающаяся тем, что сигнал с инфракрасной камеры поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов, и после идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели, причем на цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям инфракрасной камеры.
9. Головка по п.8, отличающаяся тем, что имеет пассивный или активный радиолокатор и/или автопилот, сигналы с которых поступают в компьютер.
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2382315C1 |
| US 7487933 B1, 10.02.2009. | |||

