Изобретение относится к военной технике, в частности к средствам поражения воздушных целей.
Известно применение глобальных навигационных систем для определения координат объекта с использованием спутников специального назначения.
Если известно расстояние до одного спутника, то координаты приемника определить нельзя (он может находиться в любой точке сферы радиусом, описанной вокруг спутника). Пусть известна удаленность приемника от второго спутника. В этом случае определение координат также не представляется возможным - объект находится на окружности, которая является пересечением двух сфер. Расстояние до третьего спутника сокращает неопределенность в координатах до двух точек. Этого уже достаточно для однозначного определения координат - дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, для трехмерной навигации теоретически достаточно знать расстояния от приемника до 3 спутников.
Глобальная Навигационная Спутниковая Система (ГЛОНАСС) - советская и российская спутниковая система навигации, разработана по заказу Министерства обороны СССР. Одна из двух функционирующих на сегодня систем глобальной спутниковой навигации. Основой системы должны являться 24 спутника, движущихся над поверхностью Земли в трех орбитальных плоскостях с наклоном орбитальных плоскостей 64,8° и высотой 19100 км. Принцип измерения аналогичен американской системе навигации NAVSTAR GPS. В настоящее время развитием проекта ГЛОНАСС занимается Федеральное космическое агентство (Роскосмос) и ОАО «Российские космические системы»..
Российская глобальная навигационная спутниковая система (ГЛОНАСС) предназначена для оперативного навигационно-временного обеспечения неограниченного числа пользователей наземного, морского, воздушного и космического базирования. Доступ к гражданским сигналам ГЛОНАСС в любой точке земного шара на основании указа Президента РФ предоставляется российским и иностранным потребителям на безвозмездной основе и без ограничений.
Для обеспечения коммерциализации и массового внедрения технологий ГЛОНАСС в России и за рубежом Постановлением Правительства РФ в июле 2009 г. был создан «Федеральный сетевой оператор в сфере навигационной деятельности», функции которого были возложены на ОАО «Навигационно-информационные системы».
Основное отличие от системы GPS в том, что спутники ГЛОНАСС в своем орбитальном движении не имеют резонанса (синхронности) с вращением Земли, что обеспечивает им большую стабильность. Таким образом, группировка КА ГЛОНАСС не требует дополнительных корректировок в течение всего срока активного существования. Тем не менее, срок службы спутников ГЛОНАСС заметно короче.
Изветна занитная ракета с твердотопливным ракетным двигателем по патенту РФ на изобретение №2327949, МПК F42B 15/00, опубл. 27.06.2008 г.
Недостаток - низкая скорость движения зенитной ракеты и плохая ее управляемость. В случае применения ракетного двигателя твердого топлива невозможно регулировать его силу тяги и очень трудно управлять курсом ракеты.
Известна зенитная ракета с ЖРД (жидкостным ракетным двигателем) по св. РФ на полезную модель №93962, МПК F42B 15/00, опубл. 27/06/2008 г, прототип.
Зенитная ракета содержит корпус осесимметричной формы, внутри корпуса которого установлено взрывное устройство, баллон со сжатым воздухом, баки окислителя и горючего, жидкостный ракетный двигатель и систему управления.
Недостатки - относительно небольшая скорость и дальность полета и ограничения в управлении и наведении ракеты и, как следствие, низка точность попадания.
Задачи создания изобретения: увеличение скорости движения зенитной ракеты, дальности и точности попадания и расширение функциональных возможностей применения.
Решение указанных задач достигнуто в зенитной ракете, содержащей разгонную и маршевую ступени и головную часть, стабилизаторы и корпус осесимметричной формы, взрывное устройство, баллон со сжатым воздухом, баки окислителя и горючего, жидкостный ракетный двигатель и систему управления, отличающейся тем, что разгонная ступень выполнена с ракетным двигателем твердого топлива и имеет нижние стабилизаторы, а маршевая ступень выполнена со средними стабилизаторами и с жидкостным ракетным двигателем, установленным вдоль оси корпуса и содержащим камеру сгорания и турбонасосный агрегат с турбиной и насосами окислителя и горючего, баки окислителя и горючего соединены ракетными трубопроводами с турбонасосным агрегатом, на средних стабилизаторах установлены соосно с жидкостным ракетным двигателем четыре рулевых реактивных сопла, которые трубами, содержащими регуляторы расхода, соединены с турбиной и дополнительным баллоном сжатого воздуха. На головной части могут быть установлены верхние стабилизаторы. Система управления может содержать бортовой компьютер, соединенный с контроллером управления. Контроллер управления может быть соединен средствами связи с регуляторами расхода. К бортовому компьютеру средствами связи может быть подключено приемно-передающее устройство с антенной. Система управления может содержать приемник системы глобального позиционирования, подключенный к антенне и к бортовому компьютеру. Система управления может содержать видеокамеру, подключенную средствами связи к бортовому компьютеру.
Проведенные патентные исследования показали, что предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Сущность изобретения поясняется на фиг.1…14, где:
на фиг.1 приведена принципиальная схема простейшего варианта зенитной ракеты,
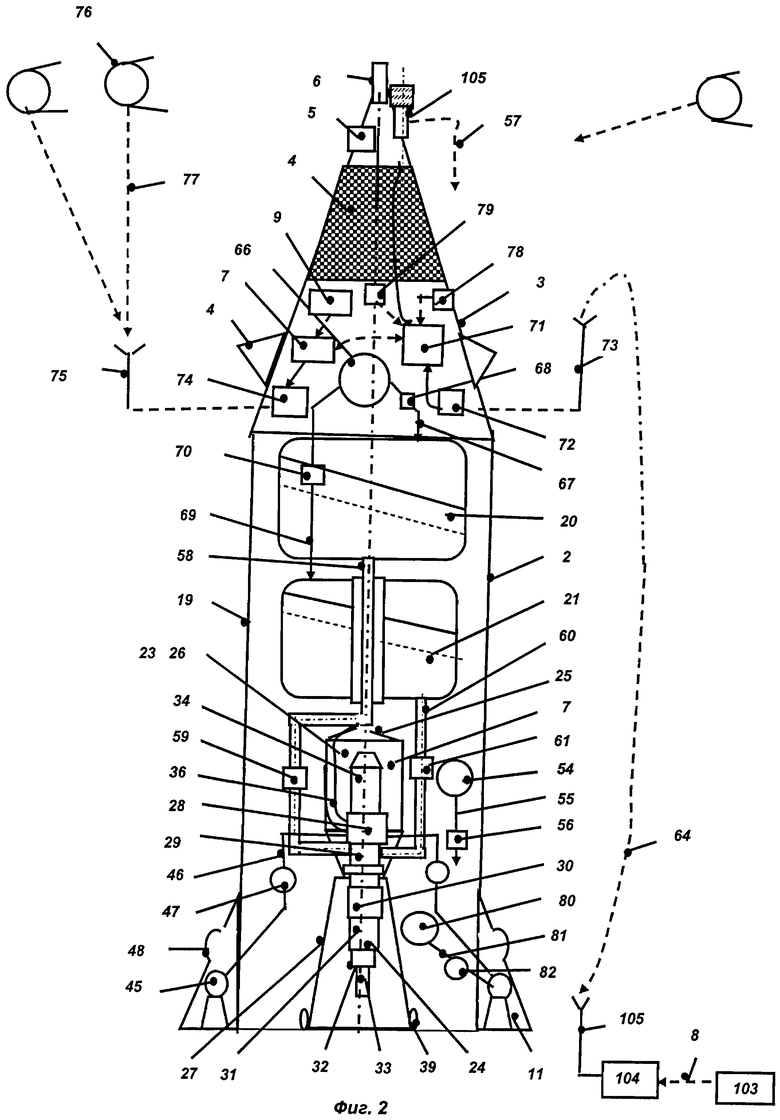
на фиг.2 приведена схема разгонной ступени,
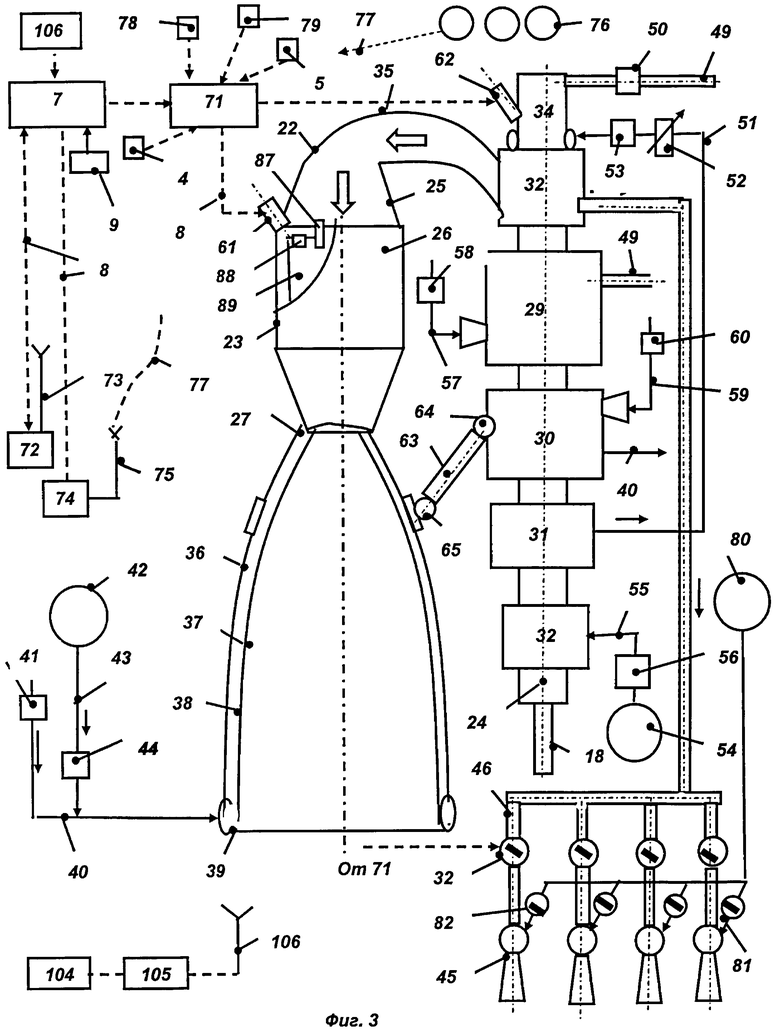
на фиг.3 приведена схема ЖРД для зенитной ракеты,
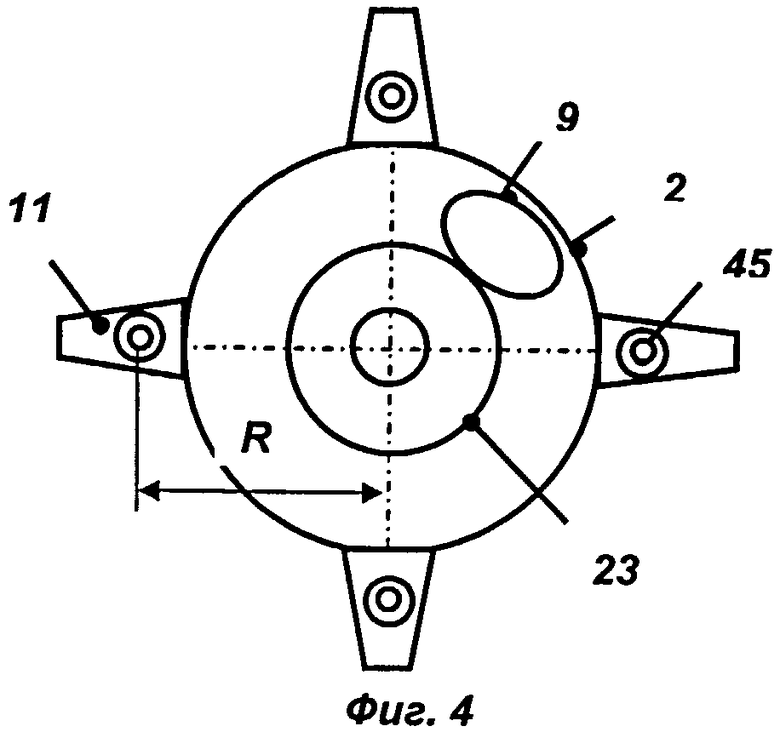
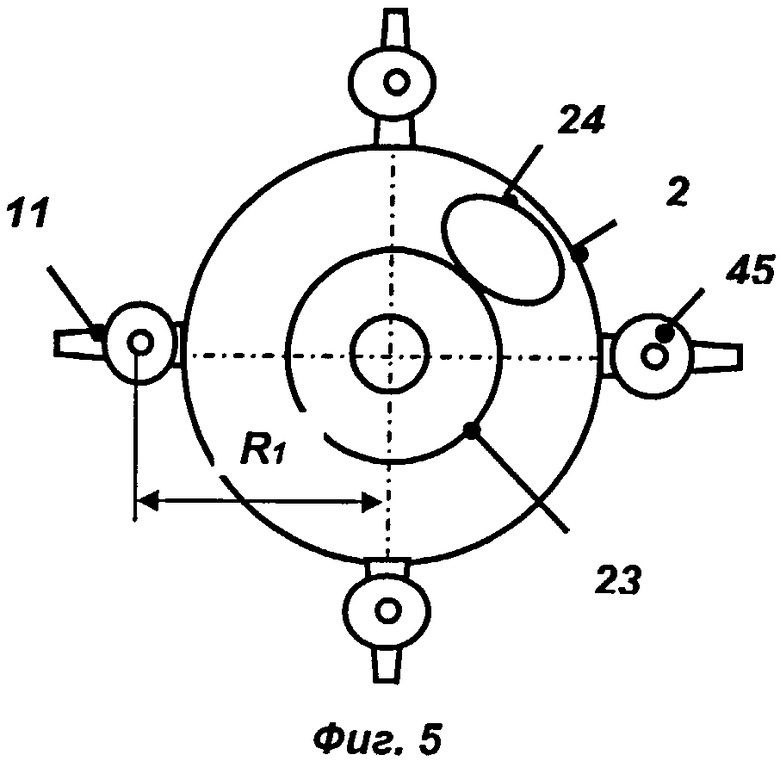
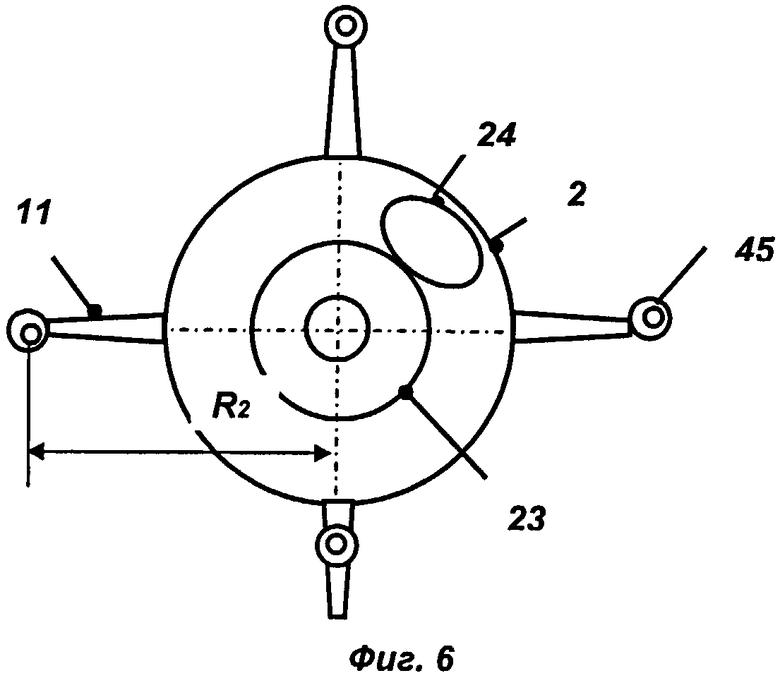
на фиг.4…6 приведен вид зенитной ракеты сзади,
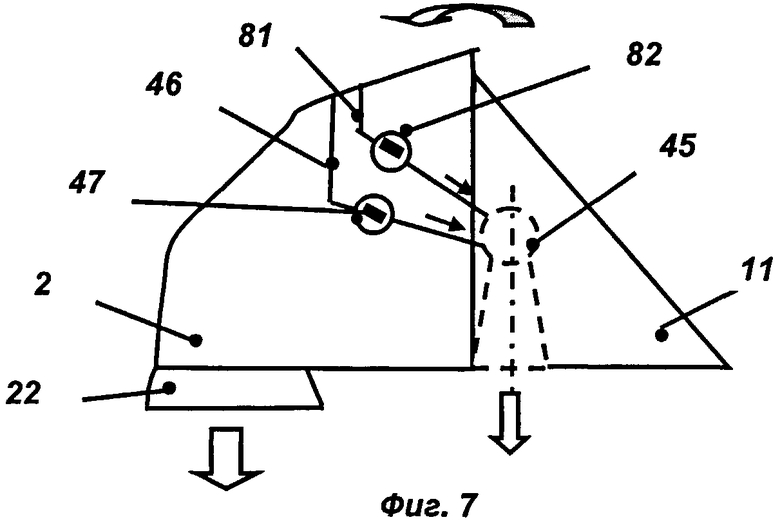
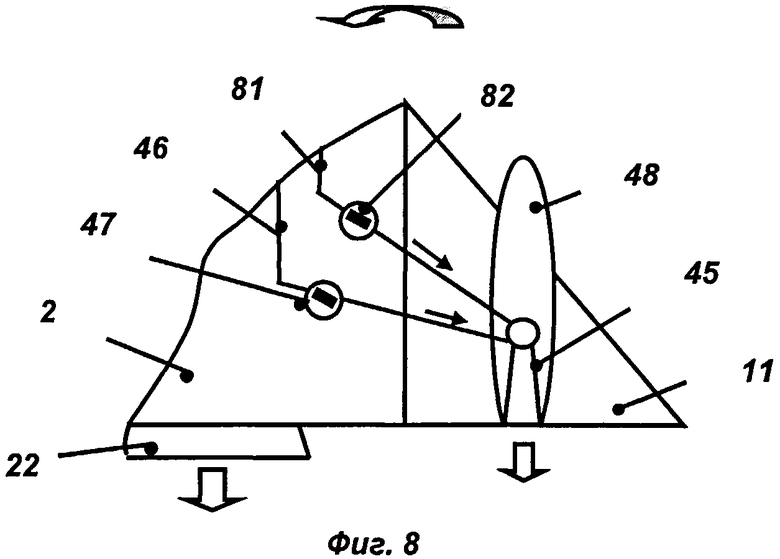
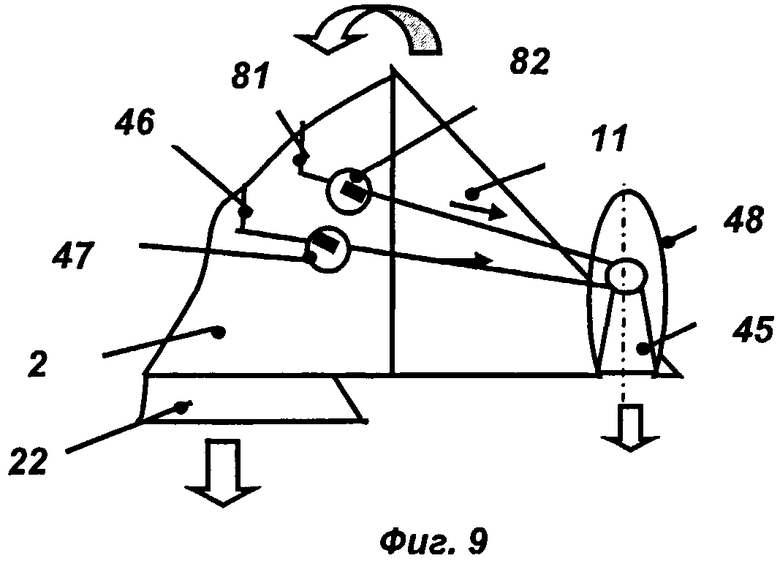
на фиг.7…9 приведен вид нижних стабилизаторов,
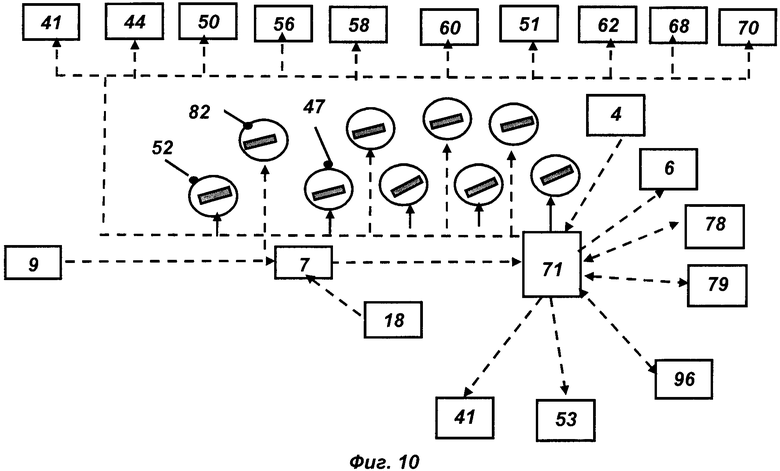
на фиг.10 приведена схема зенитной ракеты с автономным управлением,,
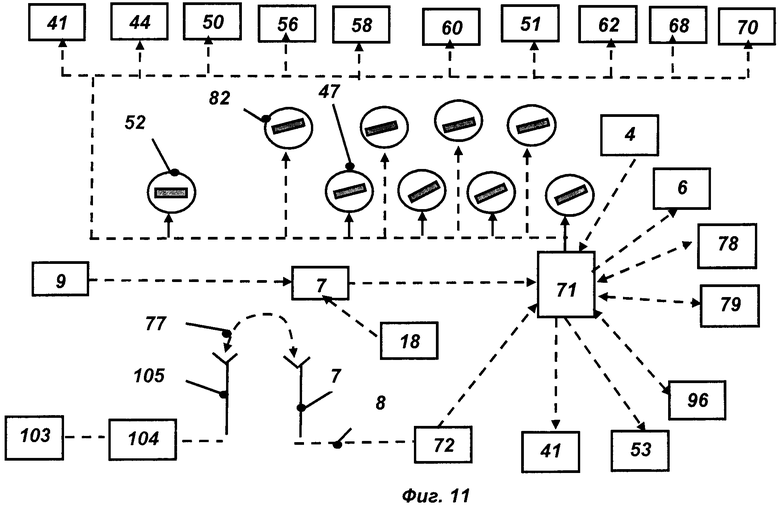
на фиг.11 приведена схема радиоуправляемой зенитной ракеты,
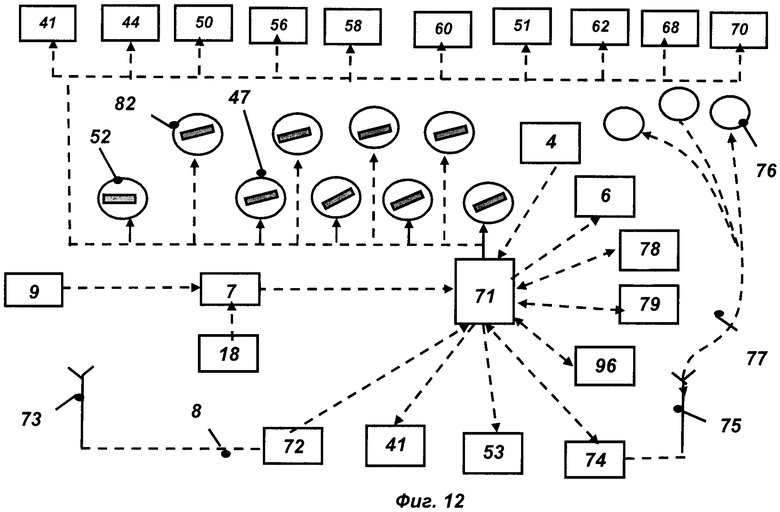
на фиг.12 приведена зенитная ракета с управлением при помощи системы глобального позиционирования,
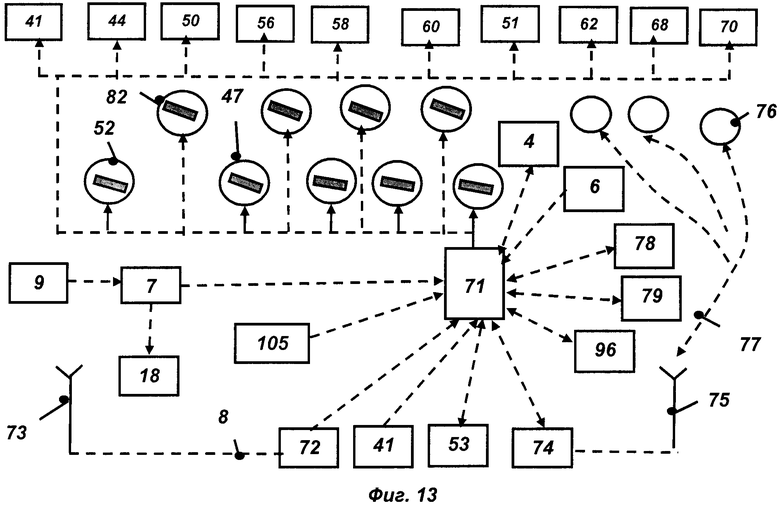
на фиг.13 приведена зенитная ракета с видеокамерой,
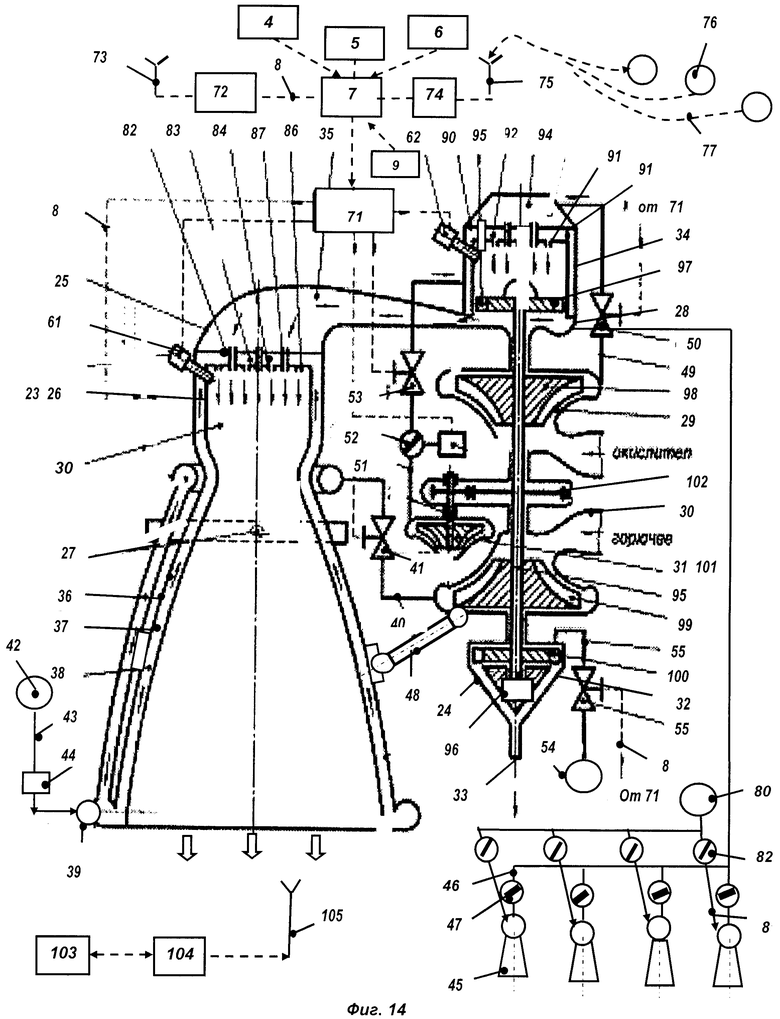
на фиг 14 приведена полная пневмо-гидравличская схема ЖРД.
Зенитная ракета (фиг.1…14) содержит разгонную и маршевую ступени 1 и 2, соответственно, и головную часть 3, в которой установлено взрывное устройство 4, система самонаведения 5 и контактный взрыватель 6. Кроме того, внутри головной части 3 установлен бортовой компьютер 7, который электрическими связями 8 соединен с бортовым источником энергии 9. Зенитная ракета имеет три группы стабилизаторов: нижние стабилизаторы 10, средние стабилизаторы 11 и верхние стабилизаторы 12. Применение верхних стабилизаторов 12 не обязательно.
Разгонная ступень 1 содержит корпус 13 осесимметричной формы. Внутри корпуса 13 выполнена тепловая изоляция 14 и установлен ракетный двигатель твердого топлива 15 (РДТТ). Ракетный двигатель твердого топлива 15 имеет заряд твердого топлива 16 и запальное устройство 17. Также внутри корпуса 13 установлен блок управления 18 разгонной ступени 1, соединенный электрической связью 8 с бортовым компьютером 7.
Маршевая ступень 2 содержит корпус 19, внутри которого установлены баки окислителя и горючего 20 и 21, соответственно. Предпочтительно баки 20 и 21 выполнить тороидальной формы.
Также внутри корпуса 19 вдоль его оси в центральной части установлен ЖРД (жидкостный ракетный двигатель) 22. Жидкостный ракетный двигатель 22 состоит из камеры сгорания 23 и ТНА 24. Камера сгорания 23 имеет головку 25, цилиндрическую часть 26 и сопло 27 (фиг.2).
Турбонасосный агрегат 24 (фиг.1 и 2) содержит основную турбину 28, насос окислителя 29, насос горючего 30, дополнительный насос горючего 31 и пусковую турбину 32, к которой присоединена выхлопная труба 33. Над ТНА 24 установлен газогенератор 34. Основная турбина 28 и головка 25 камеры сгорания 23 соединены газоводом 35. Камера сгорания 23 выполнена с возможностью регенеративного охлаждения и содержит внешнюю стенку 36, внутреннюю стенку 37 с зазором 38 между ними. В нижней части сопла 27 выполнен нижний коллектор 39, полость которого соединена с зазором 38 и к нему подсоединен трубопровод горючего 40, содержащий клапан горючего 41. Другой конец трубопровода горючего 40 соединен с выходом из насоса горючего 30 (фиг.2). ЖРД 22 оборудован системой продувки, которая содержит баллон инертного газа 42, трубопровод продувки 43 с клапаном продувки 44. Трубопровод продувки 33 присоединен к нижнему коллектору 39.
Зенитная ракета оборудована четырьмя управляющими соплами 45 (фиг.1, 2 и 13). Управляющие сопла 45 работают сначала на сжатом воздухе, а потом на «кислом» газе, т.е. продуктах сгорания в газогенераторе 34 с избытком окислителя, но имеющих относительно большую температуру от 500 до 700°С. Для этого к основной турбине 28 (к входу или выходу) присоединены трубопроводы отбора газа 46, содержащие регуляторы расхода 47. Управляющие сопла 45 могут быть установлены внутри нижних стабилизаторов 3 (фиг.6) или в мотогондолах 36 обтекаемой формы (фиг.7 и 8).
Такая компоновка управляющих сопел 45 позволяет перенести их на большее расстояние от продольной оси зенитной ракеты и увеличить эффективность управления при меньшей силе тяги этих сопел.
Выход насоса окислителя 29 трубопроводом окислителя 49, содержащим клапан окислителя 50, соединен с входом в газогенератор 34. Выход из дополнительного насоса горючего 31 трубопроводом 51, содержащим регулятор расхода 52 и клапан высокого давления 53, соединен со входом в газогенератор 34.
ЖРД 22 также оборудован системой запуска, которая содержит баллон сжатого воздуха 54, трубопровод высокого давления 55 с пусковым клапаном 56. Трубопровод 55 присоединен к входу в пусковую турбину 32 (фиг.2).
Бак окислителя 20 ракетным трубопроводом 57, содержащим ракетный клапан 58, соединен с ТНА 24, конкретно со входом в насос окислителя 30, аналогично бак горючего 21 ракетным трубопроводом 59, содержащим ракетный клапан 60, соединен с ТНА 24, конкретно со входом в насос горючего 30.
На камере сгорания 23 установлены запальные устройства 61, а на ТНА 24 - запальные устройства 62. ТНА 24 закреплен на камере сгорания 23 при помощи двух кронштейнов 63 и шарниров 64 и 65.
Баки окислителя и горючего 20 и 21 (фиг.1) оборудованы системами наддува, которые содержат баллон сжатого воздуха 66. Бак окислителя 20 трубопроводом наддува 67, содержащим клапан наддува 68, соединен с баллоном сжатого воздуха 66, аналогично бак горючего 21 трубопроводом наддува 69, содержащим клапан наддува 70, соединен с баллоном сжатого воздуха 66.
Кроме того, зенитная ракета имеет систему управления, содержащую бортовой компьютер 7, соединенный электрической связью 8 с контроллером управления 71. В систему управления входят приемно-передающее устройство 72, к которому присоединена антенна 73, и приемное устройство системы дистанционного позиционирования 74, к которому электрической связью 8 присоединена антенна 75. В систему входят спутники 76, связь с которыми осуществляется по радиоканалу 77.
К контроллеру управления 71 присоединены датчики, в том числе акселерометр 78 и магнетометр 79. К контроллеру управления 72 присоединены взрывное устройство 4 и запальное устройство 17 (фиг.1 и 2). Акселерометр 78 и магнетометр 79 для измерения углов ориентации зенитной ракеты в движении (полете), которые соединены с контроллером управления 71 (фиг.1, 2 и 13).
На маршевой ступени 2 установлен дополнительный баллон сжатого воздуха 80, к которому присоединены трубопроводы 81, соединенные с соплами управления 45. В каждом трубопроводе 81 установлены регуляторы 82 (фиг.1, 2, 6…8).
Внутри камеры сгорания 23 (фиг.13) выполнены наружная плита 83 и внутренняя плита 84 с зазором (полостью) между ними 85. Внутри головки 25 камеры сгорания 23 выполнена полость 86 и установлены форсунки окислителя 87 и форсунки горючего 88. Форсунки окислителя 87 сообщают полость 86 с внутренней полостью 89 камеры сгорания 23.
Газогенератор 24 имеет внешнюю и внутреннюю плиты соответственно 90 и 91 с полостью между ними 92 и форсунки окислители и горючего, соответственно - 93 и 94. На головке 25 камеры сгорания 23 установлены запальные устройства 61, а на газогенераторе 24 - запальные устройства 62 (фиг.2 и 13).
ТНА 9 (фиг.13) имеет установленный на валу 95 датчик частоты вращения 96. К датчику частоты вращения 96 подсоединена электрическая связь 8, которая соединена с бортовым компьютером 7. На валу 95 установлены рабочее колесо турбины 97, центробежное рабочее колесо 98 насоса окислителя 29, центробежное рабочее колесо 99 насоса горючего 30 и рабочее колесо 100 пусковой турбины 32. Центробежное рабочее колесо 101 дополнительного насоса горючего 31 соединено с валом 95 через мультипликатор 102.
К бортовому компьютеру 7 электрическими связями 8 подключены запальные устройства 61 и 62, предпочтительно пирозапальные, клапан горючего 41, клапан окислителя 50, регулятора расхода 52, клапан высокого давления 53.
В конической головной части 2 установлено взрывное устройство 4.
Для дистанционного управления (фиг.1, 2 и 13) используется пульт управления 103, который электрической связью 8 соединен с приемно-передающим устройством 104, к которому присоединена антенна 105.
Зенитная ракета может быть оборудована видеокамерой 106, подсоединенной при помощи электрической связи 8 к бортовому компьютеру 7.
Соединение разгонной ступени 1 с маршевой выполнено при помощи фермы 107 (на фиг.1…8 не показано).
БОЕВОЕ ПРИМЕНЕНИЕ ЗЕНИТНОЙ РАКЕТЫ
При пуске зенитной ракеты в первую очередь (фиг.1) запускают РДТТ 15. Для этого с бортового компьютера 7 по линиям связи 8 подают сигнал на блок управления 71, установленный на разгонной ступени 1, устройство зажигания 17. Воспламеняется заряд твердого топлива 16 и РДТ 15 запускается. Одновременно начинает работать система управления зенитной ракетой при помощи управляющих сопел 45, работающих в первом режиме (на сжатом воздухе).
Потом запускают ЖРД 22 (фиг.2, 3 и 14). Для этого с бортового компьютера 7 по электрическим связям 8 подается команда на контроллер управления 71 и далее по электрической связи 8 - на клапаны наддува 68 и 70, на ракетные клапаны 58 и 60, пусковой клапан 60, на клапан окислителя 50, клапан горючего 41 и клапан высокого давления 53. Одновременно подается электрический сигнал на запальные устройства 61 и 62.
Последовательность операций следующая: по команде с бортового компьютера 7, передаваемой по электрическим связям 8 сначала на контроллер управления 71, открывают клапаны наддува 68 и 70 при этом баки окислителя 20 и горючего 21 наддуваются сжатым воздухом (или инертным газом). Потом открывают ракетные клапаны 57, 59 и компоненты ракетного топлива поступают в ТНА 34, открывают пусковой клапан 56 и сжатый воздух из баллона сжатого воздуха по трубопроводу высокого давления 55 поступает в пусковую турбину 17. После этого открывают клапаны 26, 35 и клапан высокого давления 37 и одновременно включают запальные устройства 46 и 47 (фиг.2 и 8). Компоненты топлива (окислитель и горючее) одновременно воспламеняются в газогенераторе 34 и камере сгорания 23. При сгорании компонентов ракетного топлива в газогенераторе 34 с избытком окислителя «кислый газ» имеет температуру 500…700 °С, а в камере сгорания 23 сгорает при высокой температуре до 3500 град. С. Управление скоростью движением ракеты осуществляет бортовой компьютер 7 при помощи регулятора расхода 52, а управление направлением полета при помощи регуляторов расхода 82 (фиг.2, 3 и 14). Такая схема системы управления позволила значительно улучшить управляемость зенитной ракетой за счет применения двух систем питания «рабочим телом» управляющих сопел 45, а именно воздухом и «кислым газом». При этом эффективность работы системы управления на заключительном этапе полета резко (примерно в 10 раз) возрастает за счет более высокой температуры «кислого газа» и за счет снижения массы зенитной ракеты, вследствие отбрасывания разгонной ступени.
1-й вариант управления (автономное наведение)
При применении зенитной ракеты в автономном режиме (фиг.10) в оперативную память бортового компьютера 7 вводят исходные данные полета. Зенитная ракета запускается с земли или с корабля, для этого запускают ЖРД 22, при этом бортовой компьютер 7 подает команду на контроллер управления 71 далее на регуляторы расхода 47 и 52. Компоненты ракетного топлива подаются из топливных баков 20 и 21 в газогенератор 34 и в камеру сгорания 23, где воспламеняется при помощи запальных устройств 61. Продукты сгорания приводят в действие рабочее колесо 97 основной турбины 28, которое раскручивает вал 79 ТНА 24.
Применение жидкого топлива позволяет получить преимущество в дальности полета по сравнению с твердотопливными зенитными ракетами, т.к. теплотворная способность жидкого топлива больше, чем у твердого в 3…4 раза. Контроль положения осуществляют акселерометр 78 и магнетометр 79. После подхода к цели на расстояние 300…500 м на зенитной ракете бортовой компьютер 7 переводит жидкостный ракетный двигатель 7 в режим максимальной тяги.
2-й вариант управления (управление по радио)
Управляющий сигнал подается с компьютера с суши (фиг.11), с корабля или самолета с устройства управления 103. Сигнал с устройства управления 103 передается по электрической связи 8 на приемно-передающее устройство 104, далее на антенну 105 и по радиоканалу 64 на антенну 73 и далее на приемно-передающее устройство 72 и на бортовой компьютер 7 зенитной ракеты.
3-й вариант управления (управление с применением системы глобального позиционирования)
При полете зенитной ракеты антенна 75 приемника системы глобального позиционирования 74 (системы ГЛОНАСС или GPS) принимает сигнал с трех спутников 76 системы по радиоканалам 64 и определяет собственные координаты (фиг.12). Используя заложенную программу, посредством воздействия бортового компьютера 7 на регулятор расхода 52 можно уменьшить или увеличить тягу жидкостного ракетного двигателя 22 и, тем самым, изменить скорость и направление полета зенитной ракеты.
Управление зенитной ракетой по углам тангажа и рыскания в движении осуществляется согласно фиг.1 посредством включения управляющих сопел 45 открытием соответствующего регулятора расхода газа 47. Исходные данные об угловой ориентации зенитной ракеты постоянно контролируют акселерометр 78 и магнетометр 79. Магнетометр 79 определяет азимут движения зенитной ракеты, а акселерометр 78 его отклонение от направления вектора тяжести. Стабилизаторы 10, 11 и 12 предотвращают вращение зенитной ракеты в полете. Управление по углу крена не предусмотрено.
Применение изобретения позволило:
- повысить скорость подлета зенитной ракеты к цели до сверхзвуковой за счет применения жидкостного ракетного двигателя,
- повысить точность попадания до 0,1…0,5 м,
- значительно улучшить управляемость зенитной ракетой за счет применения двух систем питания «рабочим телом» управляющих сопел воздухом и «кислым газом». При этом эффективность работы системы управления на заключительном этапе полета резко (примерно в 10 раз) возрастает за счет более высокой температуры «кислого газа» и за счет снижения массы зенитной ракеты, вследствие отбрасывания разгонной ступени, обеспечить хорошую стабилизацию зенитной ракеты в движении в полете за счет применения двух или трех групп стабилизаторов: верхних, средних и нижних,
- уменьшить нагрузки на приборы и датчики системы управления зенитной ракеты за счет их размещения в корпус снаряда,
- стабилизировать положение зенитной ракеты в полете.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНАЯ РАКЕТА | 2012 |
|
RU2477446C1 |
| ЗЕНИТНАЯ РАКЕТА | 2012 |
|
RU2477445C1 |
| ТОРПЕДА | 2014 |
|
RU2571664C1 |
| ТОРПЕДА УНИВЕРСАЛЬНАЯ | 2012 |
|
RU2477448C1 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МОРСКОГО ИСПОЛНЕНИЯ | 2012 |
|
RU2488517C1 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА | 2012 |
|
RU2494004C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2466292C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2012 |
|
RU2481550C1 |
| ЗЕНИТНАЯ РАКЕТА И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2496090C1 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МОРСКОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2466056C1 |
Изобретение относится к боевой технике, а именно к зенитным ракетам. Зенитная ракета содержит головную часть, корпус осесимметричной формы, разгонную ступень, маршевую ступень, стабилизаторы. Внутри корпуса установлены взрывное устройство, баллон со сжатым воздухом, баки окислителя и горючего, система управления. Разгонная ступень содержит ракетный двигатель твердого топлива, нижние стабилизаторы. Маршевая ступень содержит жидкостный ракетный двигатель (ЖРД), средние стабилизаторы. Система управления соединена с бортовым компьютером и содержит видеокамеру, контроллер управления, приемник системы глобального позиционирования и антенну. ЖРД установлен вдоль оси корпуса и содержит камеру сгорания, турбонасосный агрегат (ТНА) с турбиной и насосами окислителя и горючего, баки окислителя и горючего, соединенные трубопроводами с ТНА. На средних стабилизаторах установлены соосно с ЖРД четыре рулевых реактивных сопла и соединены с турбиной и дополнительным баллоном сжатого воздуха трубами, содержащими регуляторы расхода и приводы. Изобретение позволяет увеличить скорость движения, дальность и точность попадания зенитной ракеты. 6 з.п. ф-лы, 14 ил.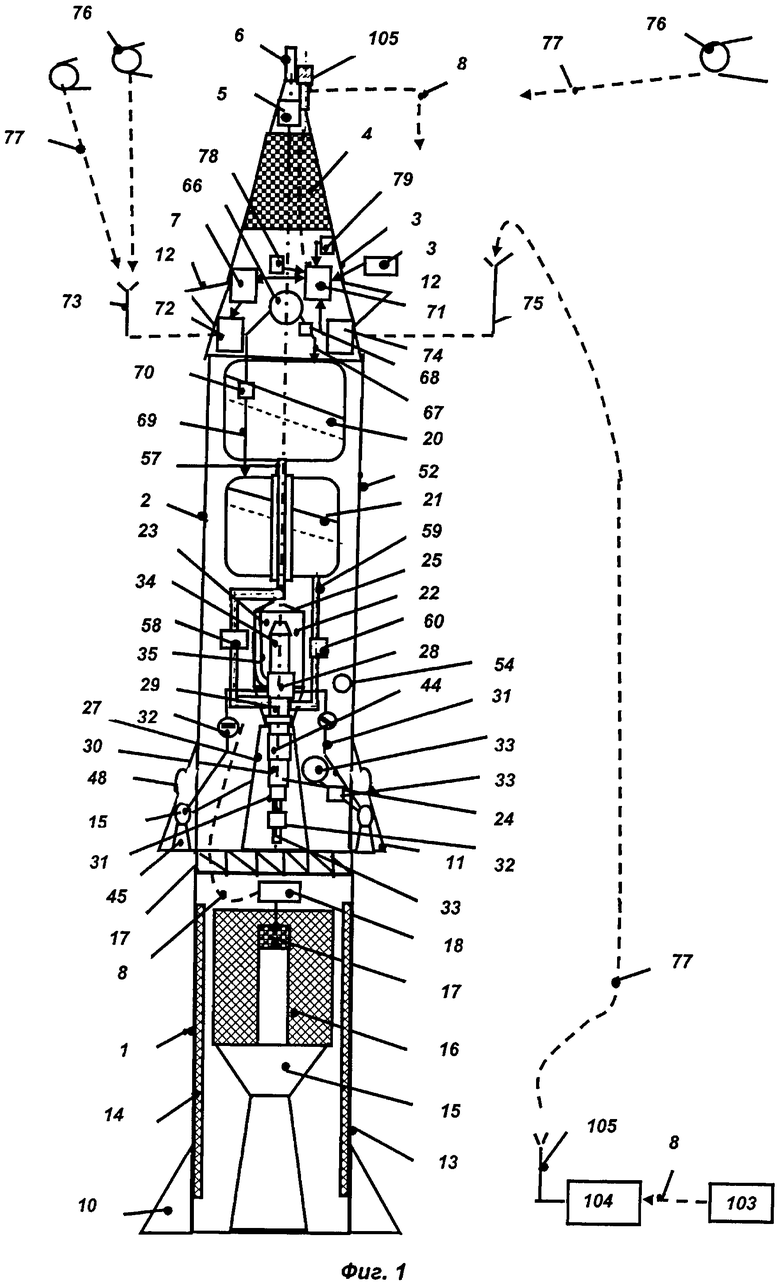
1. Зенитная ракета, содержащая разгонную и маршевую ступени и головную часть, стабилизаторы и корпус осесимметричной формы, взрывное устройство, баллон со сжатым воздухом, баки окислителя и горючего, жидкостный ракетный двигатель и систему управления, отличающаяся тем, что разгонная ступень выполнена с ракетным двигателем твердого топлива и имеет нижние стабилизаторы, а маршевая ступень выполнена со средними стабилизаторами и с жидкостным ракетным двигателем, установленным вдоль оси корпуса и содержащим камеру сгорания и турбонасосный агрегат с турбиной и насосами окислителя и горючего, баки окислителя и горючего соединены ракетными трубопроводами с турбонасосным агрегатом, на средних стабилизаторах установлены соосно с жидкостным ракетным двигателем четыре рулевых реактивных сопла, которые трубами, содержащими регуляторы расхода, соединены с турбиной и дополнительным баллоном сжатого воздуха.
2. Зенитная ракета по п.1, отличающаяся тем, что на головной части установлены верхние стабилизаторы.
3. Зенитная ракета по п.1 или 2, отличающаяся тем, что система управления содержит бортовой компьютер, соединенный с контроллером управления.
4. Зенитная ракета по п.2, отличающаяся тем, что контроллер управления соединен средствами связи с регуляторами расхода.
5. Зенитная ракета по п.1 или 2, отличающаяся тем, что к бортовому компьютеру средствами связи подключено приемно-передающее устройство с антенной.
6. Зенитная ракета по п.1 или 2, отличающаяся тем, что система управления содержит приемник системы глобального позиционирования, подключенный к антенне и к бортовому компьютеру.
7. Зенитная ракета по п.1 или 2, отличающаяся тем, что она содержит видеокамеру, подключенную средствами связи к бортовому компьютеру.
| 0 |
|
SU93522A1 | |
| РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА | 1993 |
|
RU2087389C1 |
| КРЫЛАТАЯ РАКЕТА | 2007 |
|
RU2352892C2 |
| US 7287722 B2, 30.10.2007. | |||

