Изобретения относятся к области радиосвязи и радиолокации и могут быть использованы для перестраиваемого по частоте согласования произвольных комплексных сопротивлений в заданной полосе частот.
Известен способ согласования комплексных сопротивлений, состоящий в том, что с помощью согласующего устройства, выполненного в виде резистивного четырехполюсника, включаемого между источником высокочастотного сигнала и нагрузкой, на заданной частоте достигаются условия минимизации отраженного сигнала или максимизации передачи мощности источника сигнала в нагрузку [Головков А.А., Девятков А.Г. Синтез согласующе-фильтрующих и фазовых устройств на резистивных элементах с сосредоточенными параметрами. Телекоммуникации, 2006 г. №6, стр.36-38; Головков А.А. Комплексированные радиоэлектронные устройства. - М.: Радио и связь, 1996. - 128 с.].
Известны устройства согласования, реализующие этот способ, выполненные в виде типовых схем резистивных четырехполюсников (Г-образное соединение двух резистивных двухполюсников, Т-образное соединение трех резистивных двухполюсников и т.д.), значения сопротивлений которых определены из условия минимизации отраженного сигнала или максимизации передачи мощности источника сигнала в нагрузку [там же].
Принцип действия этого способа и устройства заключается в том, что благодаря специальному выбору значений параметров резистивного четырехполюсника на заданной частоте обеспечивается полное согласование комплексного сопротивления источника сигнала и комплексного сопротивления нагрузки, а в заданной полосе частот - согласование с заданным допуском.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ согласования комплексных сопротивлений, состоящий в том, что с помощью согласующего устройства, выполненного в виде реактивного четырехполюсника, включаемого между источником высокочастотного сигнала и нагрузкой, на заданном количестве частот достигаются условия минимизации отраженного сигнала или максимизации передачи мощности источника сигнала в нагрузку [Головков А.А. Комплексированные радиоэлектронные устройства. - М.: Радио и связь, 1996. - 128 с.].
Наиболее близким по технической сущности и достигаемому результату (прототипом) является устройство согласования, реализующее этот способ, выполненные в виде типовой схемы реактивного четырехполюсника из Г-образного соединения двух реактивных двухполюсников, каждый из которых выполнен в виде колебательного контура, значения параметров которых определены из условия минимизации отраженного сигнала или максимизации передачи мощности источника сигнала в нагрузку на двух частотах [Головков А.А. Комплексированные радиоэлектронные устройства. - М.: Радио и связь, 1996. - 128 с.].
Принцип действия этого способа и устройства заключается в том, что благодаря специальному выбору значений параметров реактивного четырехполюсника на заданном количестве частот обеспечивается полное согласование комплексного сопротивления источника сигнала и комплексного сопротивления нагрузки, а в заданной полосе частот - согласование с заданным допуском.
Основным недостатком всех перечисленных способов и устройств является то, что все элементы четырехполюсников (согласующих устройств) выполнены либо только резистивными, либо только реактивными. При использовании в согласующих устройствах только реактивных или только резистивных элементов не всегда удается обеспечить условия согласования по критерию обеспечения минимума отраженного сигнала или максимума передачи мощности источника сигнала в нагрузку, поскольку такие согласующие устройства имеют определенные области физической реализуемости (области изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки), в пределах которых реализуются эти условия согласования (Головков А.А. Комплексированные радиоэлектронные устройства. - М.: Радио и связь, 1996. - 128 с.).
Все перечисленные способы и устройства обладают еще одним важным недостатком, который состоит в невозможности обеспечения перестройки по частоте согласования произвольных комплексных сопротивлений в заданной полосе частот, поскольку в схеме согласующего устройства отсутствуют управляемые нелинейные элементы и не созданы условия для такой перестройки.
Техническим результатом изобретения является расширение областей физической реализуемости как областей изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки, в пределах которых последовательно на заданном количестве частот обеспечивается полное согласование комплексного сопротивления источника сигнала и комплексного сопротивления нагрузки, а в заданной полосе частот - согласование с заданным допуском при одновременном увеличении полосы частот, в которой возможна перестройка по частоте согласования произвольных комплексных сопротивлений источника сигнала и нагрузки (например, антенны), за счет оптимизации схемы и значений параметров комплексного четырехполюсника и управления нелинейным элементом. Возможность изменения варианта включения нелинейного элемента относительно согласующего комплексного четырехполюсника еще более расширяет области физической реализуемости.
1. Указанный результат достигается тем, что в известном способе согласования комплексных сопротивлений, состоящем в том, что между источником высокочастотного сигнала и нагрузкой включают согласующее устройство, выполненное из четырехполюсника, параметры которого выбраны из условия обеспечения минимума отраженного сигнала, дополнительно четырехполюсник выполняют комплексным из реактивных и резистивных элементов, вводят двухполюсный нелинейный элемент и включают его в поперечную цепь между источником высокочастотного сигнала и входом четырехполюсника, нагрузку подключают к выходу четырехполюсника, нелинейный элемент подключают к источнику низкочастотного управляющего сигнала, условия обеспечения минимума отраженного сигнала выполняют последовательно на заданном количестве частот при одновременном изменении амплитуды управляющего сигнала за счет того, что в интересах обеспечения перестраиваемого по частоте согласования произвольных комплексных сопротивлений источника высокочастотного сигнала и нагрузки в заданной полосе частот зависимость элемента z22 матрицы сопротивлений комплексного четырехполюсника от частоты выбирают с помощью следующего математического выражения:
где z11, z21 - заданные зависимости соответствующих элементов матрицы сопротивлений комплексного четырехполюсника от частоты; z0 - заданная зависимость комплексного сопротивления источника высокочастотного сигнала от частоты; zн - заданная зависимость комплексного сопротивления нагрузки от частоты; y - заданная зависимость комплексной проводимости двухполюсного нелинейного элемента от частоты при соответствующем изменении амплитуды низкочастотного управляющего сигнала.
2. У казанный результат достигается тем, что в устройстве согласования комплексных сопротивлений, включенном между источником высокочастотного сигнала и нагрузкой и состоящем из четырехполюсника, параметры которого выбраны из условия обеспечения минимума отраженного сигнала, дополнительно четырехполюсник выполнен комплексным в виде Т-образного соединения трех двухполюсников с комплексными сопротивлениями Z1n, Z2n, Z3n, второй комплексный двухполюсник комплексного четырехполюсника сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, катушки с индуктивностью L, произвольного реактивного двухполюсника с сопротивлениями Х01, Х02 на двух частотах и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и конденсатора с емкостью С, введенный двухполюсный нелинейный элемент, подключенный к введенному источнику низкочастотного управляющего сигнала, включен между источником высокочастотного сигнала и входом четырехполюсника в поперечную цепь, нагрузка подключена к выходу четырехполюсника, значения параметров второго комплексного двухполюсника определены в соответствии со следующими математическими выражениями:
 ;
;
 ;
;
 ;
;
 ,
,
где A=(x2-X02)2[(r1-r2)2+(x2-X02)2]; B=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x2-X02)2];

D=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x1-X01)2]; E=(x1-X01)2[(r1-r2)2+(x1-X01)2]; r1, r2, x1, x2 - оптимальные значения действительных и мнимых составляющих сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах;
 - оптимальные значения сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах;
- оптимальные значения сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах;
Z1n, Z3n - заданные значения сопротивления первого и третьего комплексных двухполюсников комплексного четырехполюсника на двух частотах;
z0n - заданные значения комплексных сопротивлений источника высокочастотного сигнала на двух частотах;
zнn - заданные значения комплексных сопротивлений нагрузки на двух частотах;
yn - заданные значения комплексных проводимостей двухполюсного нелинейного элемента на двух частотах, соответствующих двум значениям амплитуды управляющего сигнала;
ω1,2=2πf1,2; n=1, 2 - номера заданных двух частот f1,2.
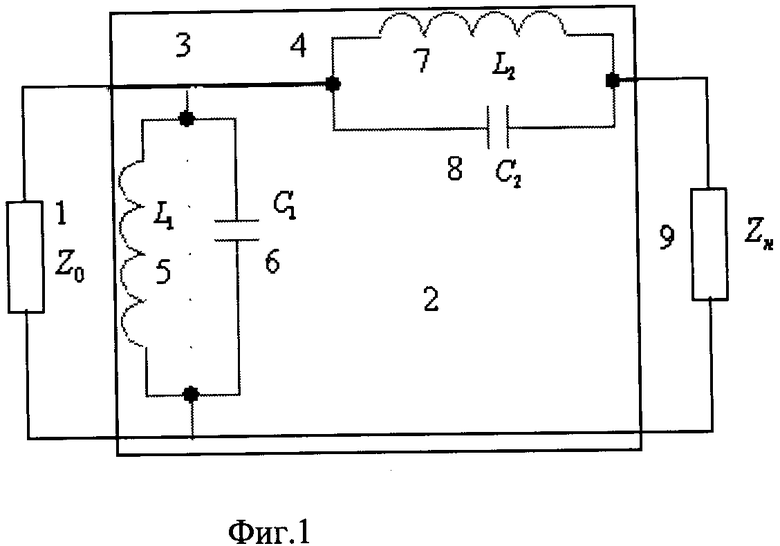
На фиг.1 показана схема согласующего устройства комплексных сопротивлений (прототип), реализующего способ-прототип.
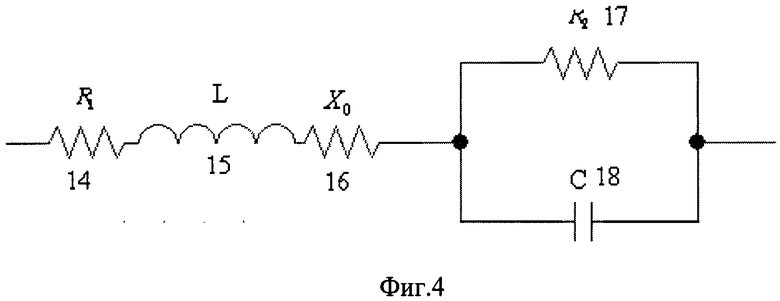
На фиг.2 показана структурная схема предлагаемого устройства по п.2., реализующая предлагаемый способ по п.1.
На фиг.3 приведена схема комплексного четырехполюсника, входящего в предлагаемое устройство, схема которого представлена на фиг.2.
На фиг.4 приведена схема второго комплексного двухполюсника, входящего в четырехполюсник, схема которого представлена на фиг.3.
Согласующее устройство-прототип (фиг.1), реализующее способ-прототип, содержит источник высокочастотного сигнала (на фиг.1 не показан) с комплексным сопротивлением 1, реактивный четырехполюсник 2 в виде Г-образного соединения двух реактивных двухполюсников 3, 4, каждый из которых выполнен в виде параллельного колебательного контура на элементах L1 - 5, C1 - 6 и L2 - 7, С2 - 8, и нагрузку с комплексным сопротивлением 9. Значения параметров контуров выбраны из условия одновременного обеспечения согласования комплексных сопротивлений источника высокочастотного сигнала 1 и нагрузки 9 на двух частотах по критерию обеспечения минимума отраженного сигнала. Принцип действия этого устройства согласования комплексных сопротивлений источника высокочастотных сигналов и нагрузки (прототипа), реализующего способ-прототип, состоит в следующем.
Благодаря выбору значений параметров контуров из условия одновременного обеспечения согласования комплексных сопротивлений источника высокочастотного сигнала 1 и нагрузки 9 на двух частотах по критерию достижения минимума отраженного сигнала, на этих частотах осуществляется полное согласование, коэффициент стоячей волны оказывается равным единице. При разумном выборе задаваемых двух частот вблизи их окрестностях в определенной полосе частот будет достигнуто согласование с заданным допуском - коэффициент стоячей волны не превышает заданного значения.
Недостатки способа-прототипа и устройства его реализации описаны выше.
Предлагаемое устройство по п.2 (фиг.2), реализующее предлагаемый способ по п.1, содержит каскадно-соединенные источник высокочастотного сигнала (на фиг.2 не показан) с комплексным сопротивлением 1, двухполюсный нелинейный элемент 19 (включен в поперечную цепь), подключенный к источнику низкочастотного управляющего сигнала 20, комплексный четырехполюсник 10 в виде Т-образного соединения трех комплексных двухполюсников 11, 12, 13 (фиг.3), второй из которых сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1 - 14, катушки с индуктивностью L - 15, произвольного реактивного двухполюсника 16 с зависимостью сопротивления Х0 от частоты и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 - 17 и конденсатора с емкостью С - 18, и нагрузку с комплексным сопротивлением 9. Значения параметров R1, R2, С, L второго комплексного двухполюсника 12 комплексного четырехполюсника 10 выбраны из условия последовательного обеспечения согласования комплексных сопротивлений источника высокочастотного сигнала 1 и нагрузки 9 на двух частотах по критерию обеспечения минимума отраженного сигнала при соответствующем изменении амплитуды низкочастотного управляющего сигнала.
Принцип действия этого устройства согласования комплексных сопротивлений источника высокочастотных сигналов и нагрузки, реализующего предлагаемый способ, состоит в следующем.
Благодаря выбору значений параметров R1, R2, C, L второго комплексного двухполюсника 12 комплексного четырехполюсника 10 из условия последовательного обеспечения согласования комплексных сопротивлений источника высокочастотного сигнала 1 и нагрузки 9 на двух частотах по критерию обеспечения минимума отраженного сигнала при двух значениях амплитуды низкочастотного управляющего сигнала, на этих частотах последовательно осуществляется полное согласование, коэффициент стоячей волны оказывается равным единице. При разумном выборе задаваемых двух частот вблизи их окрестностях в определенной полосе частот будет достигнуто перестраиваемое по частоте согласование с заданным допуском - коэффициент стоячей волны не превышает заданного значения при непрерывном изменении амплитуды низкочастотного управляющего сигнала. Эти две частоты выбираются из заданной полосы частот в соответствии с указанным условием. В частном случае, соответствующем постоянству амплитуды низкочастотного управляющего сигнала, в определенной полосе частот будет достигнуто одновременное согласование с заданным допуском - коэффициент стоячей волны не превышает заданного значения, а на двух заданных частотах одновременно осуществляется полное согласование. Полоса частот, в пределах которой наблюдается перестраиваемое согласование, всегда шире, чем полоса частот, в пределах которой наблюдается одновременное согласование.
Докажем возможность реализации указанных свойств.
Пусть известны зависимости сопротивления z0=r0+jx0 источника высокочастотного сигнала и нагрузки zн=rн+jxн от частоты. Известны также зависимости проводимости нелинейного элемента y=g+jb от частоты и амплитуды низкочастотного управляющего сигнала. Для простоты записи аргументы ω=2πf (круговая частота) и U, I (амплитуды низкочастотного управляющего сигнала) опущены.
Нелинейный элемент и комплексный четырехполюсник (КЧ) характеризуются следующими матрицами передачи:
 ;
; 
где  ; z11, z21, z22 - определитель и элементы матрицы сопротивлений КЧ с учетом условия взаимности z12=-z21.
; z11, z21, z22 - определитель и элементы матрицы сопротивлений КЧ с учетом условия взаимности z12=-z21.
Умножим матрицу передачи нелинейного элемента на матрицу передачи комплексного четырехполюсника. С учетом z0, zн (: Фельдштейн А.Л., Явич Л.Р. Синтез четырехполюсников и восьмиполюсников на СВЧ. - М.: Связь, 1971. с.34-36) получим выражение для нормированной классической матрицы передачи согласующего устройства:
Используя известные соотношения между элементами классической матрицы передачи и элементами матрицы рассеяния (там же) с учетом (2), получим выражение для коэффициента отражения:

Решение комплексного уравнения, сформированного из равенства нулю коэффициента отражения (3):

Полученная взаимосвязь элементов матрицы сопротивлений КЧ (4) с учетом заданных частотных зависимостей z11, z21, z0, y, zн является оптимальной аппроксимирующей функцией частотной зависимости соответствующего элемента (z22) матрицы сопротивлений КЧ. Если реализовать эту аппроксимирующую функцию в пределах какой-либо полосы частот или на отдельных частотах, то в этой полосе частот или на этих частотах будут обеспечены условия согласования по критерию достижения минимума отраженного сигнала. Для этого необходимо взять любую типовую схему КЧ, найти матрицу сопротивлений этой схемы и найденные таким образом элементы этой матрицы, выраженные через параметры схемы, подставить в (4) и решить сформированное комплексное уравнение относительно сопротивления выбранного одного двухполюсника. Частотные характеристики остальных параметров r0, x0, rн, хн, r, x и оставшихся двухполюсников КЧ могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например, из условия увеличения полосы частот, в пределах которой будет достигнуто перестраиваемое по частоте согласование с заданным допуском - коэффициент стоячей волны не превышает заданного значения при непрерывном изменении амплитуды низкочастотного управляющего сигнала.
В соответствии с изложенным алгоритмом получены выражения для отыскания оптимальной аппроксимации частотной зависимости комплексного сопротивления второго двухполюсника КЧ в виде Т-образного соединения трех комплексных двухполюсников (фиг.3):

где n=1, 2 … - номера частот интерполяции. Сопротивления Z1n, Z3n могут быть выбраны произвольно или исходя из каких-либо других физических соображений. Индекс n необходимо ввести и в другие обозначения физических величин, явным образом зависящих от частоты. Физический смысл решения (5) состоит в том, что частотная зависимость комплексного сопротивления второго двухполюсника КЧ обеспечивает равенство частотной зависимости сопротивления источника высокочастотного сигнала и частотной зависимости входного сопротивления остальной части согласующего устройства (в сечении 1-1I (фиг.2)). При этом обеспечивалось бы полное согласование на всем спектре частот. Однако реализация (5) в сплошной, даже очень узкой полосе частот, при постоянной амплитуде напряжения на нелинейном элементе не возможна.
Для реализации оптимальной аппроксимации (5) последовательно на всех частотах заданной полосы частот, соответствующей заданному диапазону изменения амплитуды управляющего сигнала на нелинейном элементе, методом интерполяции необходимо сформировать двухполюсник с сопротивлением Z2n из не менее чем 2N (N - число частот интерполяции) элементов типа R, L, C, найти выражения для их сопротивлений, приравнять их оптимальным значениям сопротивлений двухполюсника на заданных частотах, соответствующих заданным амплитудам управляющего сигнала, определенным по формулам (5), и решить сформированную таким образом систему 2N уравнений относительно 2N выбранных параметров R, L, C. Значения параметров остальных элементов могут быть выбраны произвольно или исходя из каких-либо других физических соображений, например из условия физической реализуемости. Пусть второй двухполюсник КЧ с сопротивлением Z2n сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, катушки с индуктивностью L, произвольного реактивного двухполюсника с сопротивлениями Х01, Х02 и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и конденсатора с емкостью С (фиг.4). Комплексное сопротивление второго двухполюсника КЧ:

Разделим в (6) между собой действительную и мнимую части и для N=1 составим систему четырех уравнений:
 ;
; 
Решение:


 ;
;
 ,
,
где A=(x2-X02)2[(r1-r2)2+(x2-X02)2]; B=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x2-X02)2];

D=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x1-X01)2]; E=(x1-X01)2[(r1-r2)2+(x1-X01)2]; r1, r2, x1, x2 - оптимальные значения действительных и мнимых составляющих сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах и двух амплитудах управляющего сигнала на нелинейном элементе (сопротивление Z2n (5) зависит от zn).
Реализация оптимальных аппроксимаций частотных характеристик четырехполюсника (4) с помощью Т-образного звена (5) и второго двухполюсника этого звена с помощью (6), (8) обеспечивает реализацию условия согласования с заданным допуском последовательно на всех заданных частотах требуемой полосы частот, соответствующей диапазону изменения амплитуды управляющего сигнала на нелинейном элементе. Разумный выбор положений частот ω1, ω2 относительно друг друга и дополнительное варьирование значений свободных от ограничений типа (4)-(6), (8) параметров еще более увеличивает полосу частот, в пределах которой будет достигнуто перестраиваемое по частоте согласование с заданным допуском - коэффициент стоячей волны не превышает заданного значения при непрерывном изменении амплитуды низкочастотного управляющего сигнала.
Предлагаемые технические решения являются новыми, поскольку из общедоступных сведений неизвестны способ и устройство согласования комплексных сопротивлений в заданной полосе частот за счет специального выбора частотной зависимости элемента z22 матрицы сопротивлений комплексного четырехполюсника, реализуемой выполнением этого четырехполюсника в виде Т-образного соединения трех комплексных двухполюсников, формированием второго комплексного двухполюсника Т-образного соединения из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, катушки с индуктивностью L, произвольного реактивного двухполюсника с сопротивлениями Х01, Х02 на двух частотах и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и конденсатора с емкостью С и выбором указанных параметров по соответствующим математическим выражениям в интересах достижения минимума отраженного сигнала последовательно на всех частотах этой полосы частот при соответствующем изменении амплитуды низкочастотного управляющего сигнала.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций (выполнение согласующего устройства для реализации предлагаемого способа в виде, показанном на фиг.2, выполнение четырехполюсника комплексным в виде указанным выше способом соединенных между собой трех двухполюсников (фиг.3), формирования второго двухполюсника из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, катушки с индуктивностью L, произвольного реактивного двухполюсника с сопротивлениями Х01, Х02 на двух частотах и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и конденсатора с емкостью С (фиг.4), выбора значений элемента z22 матрицы сопротивлений комплексного четырехполюсника, выбора значений параметров второго двухполюсника КЧ из условия последовательного обеспечения условий согласования на всех заданных частотах при изменении состояния нелинейного двухполюсного элемента под действием амплитуды низкочастотного управляющего сигнала) обеспечивает перестраиваемое согласование по критерию минимума отраженного сигнала в заданной полосе частот по закону изменения амплитуды низкочастотного управляющего сигнала.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью полупроводниковые диоды (параметрические диоды, p-i-n диоды, диоды Ганна, туннельные диоды, лавинно-пролетные диоды и т.д.), индуктивности, резисторы и емкости, сформированные в заявленную схему комплексного четырехполюсника. Значения параметров индуктивностей, резистивных элементов и емкостей, входящих в схему второго двухполюсника КЧ, могут быть однозначно определены с помощью математических выражений, приведенных в формуле изобретения.
Технико-экономическая эффективность предложенных способа и устройства заключается в последовательном обеспечении условий согласования комплексных сопротивлений источника высокочастотного сигнала и нагрузки на всех частотах в заданной сплошной полосе частот, соответствующей заданному диапазону изменения амплитуды низкочастотного управляющего сигнала, за счет выбора схемы и значений параметров элементов R, L, C комплексного четырехполюсника по критерию обеспечения минимума отраженного сигнала на этих частотах при изменяемом состоянии нелинейного двухполюсного элемента под действием низкочастотного управляющего сигнала, что позволяет расширить области физической реализуемости как области изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки, в пределах которых последовательно на заданном количестве частот обеспечивается полное согласование комплексного сопротивления источника сигнала и комплексного сопротивления нагрузки, а в заданной полосе частот - согласование с заданным допуском при одновременном увеличении полосы частот, в которой возможна перестройка по частоте согласования произвольных комплексных сопротивлений источника сигнала и нагрузки (например, антенны) за счет оптимизации схемы и значений параметров комплексного четырехполюсника и управления нелинейным элементом.
Изобретение относится к области радиосвязи и радиолокации и может быть использовано для перестраиваемого по частоте согласования произвольных комплексных сопротивлений в заданной полосе частот. Техническим результатом изобретения является расширение областей физической реализуемости как областей изменения действительной и мнимой составляющих сопротивлений источника сигнала и нагрузки, в пределах которых последовательно на заданном количестве частот обеспечивается полное согласование комплексного сопротивления источника сигнала и комплексного сопротивления нагрузки. Способ согласования комплексных сопротивлений отличается тем, что четырехполюсник выполняют комплексным из реактивных и резистивных элементов, вводят двухполюсный нелинейный элемент и включают его в поперечную цепь между источником высокочастотного сигнала и входом четырехполюсника, нагрузку подключают к выходу четырехполюсника, нелинейный элемент подключают к источнику низкочастотного управляющего сигнала, условия обеспечения минимума отраженного сигнала выполняют последовательно на заданном количестве частот при одновременном изменении амплитуды управляющего сигнала. 2 н.п. ф-лы, 4 ил.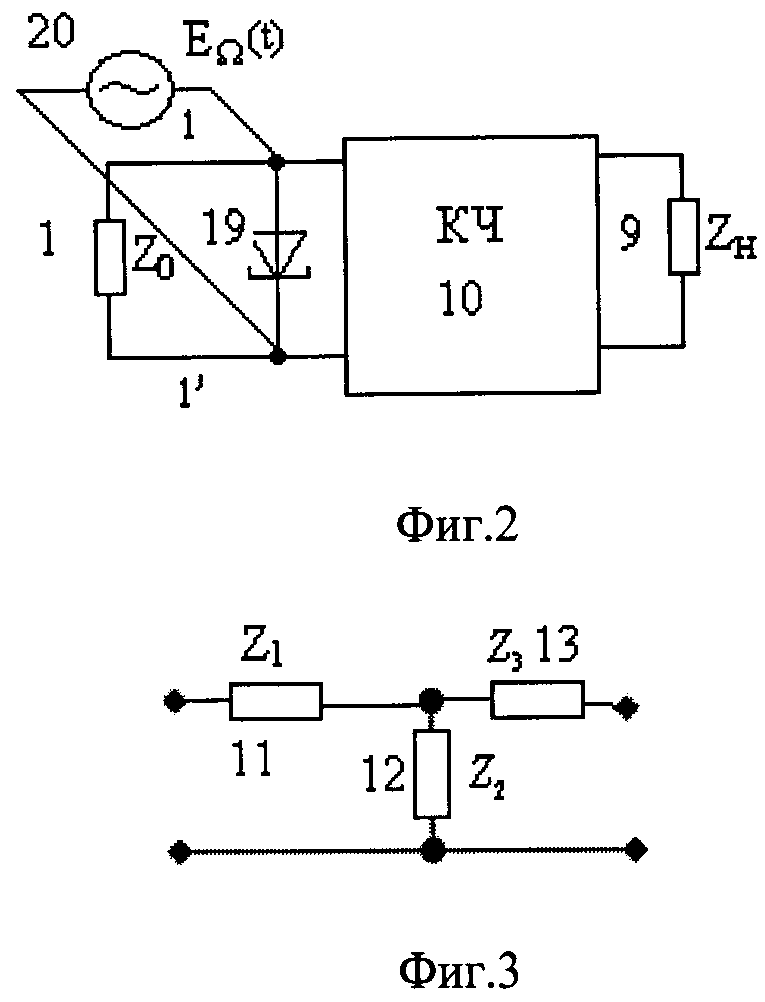
1. Способ согласования комплексных сопротивлений, состоящий в том, что между источником высокочастотного сигнала и нагрузкой включают согласующее устройство, выполненное из четырехполюсника, параметры которого выбраны из условия обеспечения минимума отраженного сигнала, отличающийся тем, что четырехполюсник выполняют комплексным из реактивных и резистивных элементов, вводят двухполюсный нелинейный элемент и включают его в поперечную цепь между источником высокочастотного сигнала и входом четырехполюсника, нагрузку подключают к выходу четырехполюсника, нелинейный элемент подключают к источнику низкочастотного управляющего сигнала, условия обеспечения минимума отраженного сигнала выполняют последовательно на заданном количестве частот при одновременном изменении амплитуды управляющего сигнала за счет того, что в интересах обеспечения перестраиваемого по частоте согласования произвольных комплексных сопротивлений источника высокочастотного сигнала и нагрузки в заданной полосе частот зависимость элемента z22 матрицы сопротивлений комплексного четырехполюсника от частоты выбирают с помощью следующего математического выражения:
где z11, z21 - заданные зависимости соответствующих элементов матрицы сопротивлений комплексного четырехполюсника от частоты; z0 - заданная зависимость комплексного сопротивления источника высокочастотного сигнала от частоты; zн - заданная зависимость комплексного сопротивления нагрузки от частоты; y - заданная зависимость комплексной проводимости двухполюсного нелинейного элемента от частоты при соответствующем изменении амплитуды низкочастотного управляющего сигнала.
2. Устройство согласования комплексных сопротивлений, включенное между источником высокочастотного сигнала и нагрузкой и состоящее из четырехполюсника, параметры которого выбраны из условия обеспечения минимума отраженного сигнала, отличающееся тем, что четырехполюсник выполнен комплексным в виде Т-образного соединения трех двухполюсников с комплексными сопротивлениями Z1n, Z2n, Z3n, второй комплексный двухполюсник комплексного четырехполюсника сформирован из последовательно соединенных первого резистивного двухполюсника с сопротивлением R1, катушки с индуктивностью L, произвольного реактивного двухполюсника с сопротивлениями Х01, Х02 на двух частотах и параллельно соединенных между собой второго резистивного двухполюсника с сопротивлением R2 и конденсатора с емкостью С, введенный двухполюсный нелинейный элемент, подключенный к введенному источнику низкочастотного управляющего сигнала, включен между источником высокочастотного сигнала и входом четырехполюсника в поперечную цепь, нагрузка подключена к выходу четырехполюсника, значения параметров второго комплексного двухполюсника определены в соответствии со следующими математическими выражениями:



 ,
,
где A=(x2-X02)2[(r1-r2)2+(x2-X02)2]; B=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x2-X02)2];

D=-2(x1-X01)(x2-X02)[(r1-r2)2+2(x1-X01)2]; E=(x1-X01)2[(r1-r2)2+(x1-X01)2];
r1, r2, x1, x2 - оптимальные значения действительных и мнимых составляющих сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах;  - оптимальные значения сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах; Z1n, Z3n - заданные значения сопротивления первого и третьего комплексных двухполюсников комплексного четырехполюсника на двух частотах; z0n - заданные значения комплексных сопротивлений источника высокочастотного сигнала на двух частотах; zнn - заданные значения комплексных сопротивлений нагрузки на двух частотах; yn - заданные значения комплексных проводимостей двухполюсного нелинейного элемента на двух частотах, соответствующих двум значениям амплитуды управляющего сигнала; ω1,2=2πf1,2; n=1, 2 - номера заданных двух частот f1,2.
- оптимальные значения сопротивления второго комплексного двухполюсника комплексного четырехполюсника на двух частотах; Z1n, Z3n - заданные значения сопротивления первого и третьего комплексных двухполюсников комплексного четырехполюсника на двух частотах; z0n - заданные значения комплексных сопротивлений источника высокочастотного сигнала на двух частотах; zнn - заданные значения комплексных сопротивлений нагрузки на двух частотах; yn - заданные значения комплексных проводимостей двухполюсного нелинейного элемента на двух частотах, соответствующих двум значениям амплитуды управляющего сигнала; ω1,2=2πf1,2; n=1, 2 - номера заданных двух частот f1,2.
| Баскаков С.И | |||
| Радиотехнические цепи и сигналы | |||
| - М.: Высшая школа, 1988 | |||
| Гоноровский И.С | |||
| Радиотехнические цепи и сигналы | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| - М.: Дрофа, 2006, 719 с | |||
| УСТРОЙСТВО МОДУЛЯЦИИ АМПЛИТУДЫ И ФАЗЫ РАДИОЧАСТОТНЫХ СИГНАЛОВ | 2007 |
|
RU2342769C2 |
| US 5155455 А, 13.10.1992 | |||
| WO 2006107837 A1, 12.10.2006. | |||

