Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования изображения, на которое может быть смонтировано вспомогательное устройство, и которое может осуществлять связь со вспомогательным устройством, а также относится к вспомогательному устройству, которое может быть смонтировано на устройство формирования изображения.
Уровень техники
В последнее время в камерах со сменным объективом помимо режима захвата неподвижного изображения начали использовать режим захвата движущегося изображения. Камера включает в себя не только способ наблюдения за изображаемым объектом, используя оптическую систему наблюдения, включающую в себя отражающее зеркало, но также способ наблюдения для осуществления контроля над захваченным изображением при помощи отображения изображения на жидкокристаллическом экране.
Традиционно в качестве системы для детектирования фокуса при захвате движущегося изображения с предварительным просмотром в реальном времени, в видео камере или подобном устройстве существует известная система с рыскающими движениями для незначительного привода фокусирующей линзы в направлении назад и вперед (режим с рыскающими движениями) для детектирования фокуса. В системе с рыскающими движениями в то время, когда фокусирующая линза незначительно приводится в действие, отбирается оценочное значение автоматической фокусировки (АФ) для определения, находится ли в настоящий момент времени объект в фокусе. Опубликованная заявка № 9-284632 на выдачу патента Японии раскрывает технологию фокусировки объекта, используя систему с рыскающими движениями.
Во время захвата движущегося изображения и во время предварительного отображения в сменном объективе требуется постоянная работа приводов, например, руководствуясь фокусировкой и приведением в действие диафрагмы. Следовательно, является важным управление приведением в действие приводов совместно с частым отслеживанием состояний фокусирующей линзы и диафрагмы. Отслеживание состояния сменного объектива и управление приведением в действие каждого из приводов реализуется функциональностью связи между сменным объективом и корпусом камеры.
Во время предварительного отображения и во время захвата движущегося изображения информация для каждого кадра, относящаяся к вышеупомянутому управлению приведением в действие, передается между микрокомпьютером объектива, находящимся в сменном объективе, и микрокомпьютером камеры, находящимся в корпусе камеры. Следовательно, необходимая информация должна быть своевременно передана к микрокомпьютеру объектива и микрокомпьютеру камеры. Когда производительность камеры и сменного объектива повышается, количество данных, которые должны быть переданы, также увеличивается. Следовательно, требуется увеличение производительности связи. Опубликованная заявка № 2009-258558 на выдачу патента Японии раскрывает систему камеры, включающую в себя множество систем связи. Более точно, для увеличения эффективности связи она раскрывает выполнение связи при захвате движущегося изображения, используя два типа систем связи, т.е. высокоскоростную связь от объектива к камере и низкоскоростную связь от камеры к объективу.
В течение режима с рыскающими движениями накопление заряда и привод диафрагмы для запроса оценочного значения АФ желательно должны выполняться при остановке привода фокусирующей линзы. Тогда как, когда накопление заряда и привод диаграммы для запроса оценочного значения АФ выполняется во время привода фокусирующей линзы, оценочное значение АФ меняется таким образом, что точного результата фокусировки не получается. Следовательно, микрокомпьютеру камеры требуется передавать к микрокомпьютеру объектива сигнал, который синхронизирован с экспонированием датчика изображения, для уведомления микрокомпьютера объектива о привязке по времени экспонирования датчика изображения в каждом кадре. Микрокомпьютер камеры передает такой сигнал к микрокомпьютеру объектива таким образом, что микрокомпьютер может управлять привязкой по времени привода фокусирующей линзы на основе привязки по времени экспонирования датчика изображения. В результате, микрокомпьютер камеры может приводить в действие диафрагму и запрашивать оценочное значение АФ в то время, когда привод фокусирующей линзы останавливается. Однако в традиционной технологии требуется выделенная сигнальная линия между камерой и объективом для передачи сигнала к микрокомпьютеру объектива, что приводит к увеличенному количеству контактов.
Раскрытие изобретения
Настоящее изобретение направлено для того, чтобы обеспечить возможность уведомления объектива о привязки по времени экспонирования датчика изображения без необходимости выделения контакта для передачи сигнала, который синхронизирован с экспонированием датчика изображения.
Согласно одному аспекту настоящего изобретения, устройство формирования изображения, к которому съемным образом присоединяется вспомогательное устройство, включает в себя блок формирования изображения, выполненный с возможностью преобразовывать изображение объекта в электрический сигнал, блок генерирования сигнала, выполненный с возможностью генерировать сигнал вертикальной синхронизации, который синхронизирован с привязкой по времени экспонирования блока формирования изображения и выводит сгенерированный сигнал вертикальной синхронизации, блок управления, выполненный с возможностью управлять связью со смонтированным вспомогательным устройством на основе сигнала вертикальной синхронизации, первый терминал, выполненный с возможностью отправлять сигнал синхронизации, сгенерированный блоком управления к вспомогательному устройству, и второй терминал, выполненный с возможностью обмениваться данными со вспомогательным устройством на основе сигнала синхронизации, при этом блок управления контролирует уровень сигнала в первом терминале на предопределенном уровне, когда передача данных завершается, и затем изменяет уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации.
Дополнительные признаки и аспекты настоящего изобретения станут очевидными из последующего подробного описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав и образуют часть этого описания изобретения, иллюстрируют примерные варианты осуществления, признаки и аспекты изобретения и совместно с описанием служат для разъяснения принципов изобретения.
Фиг.1 является блок-схемой камеры и сменного объектива.
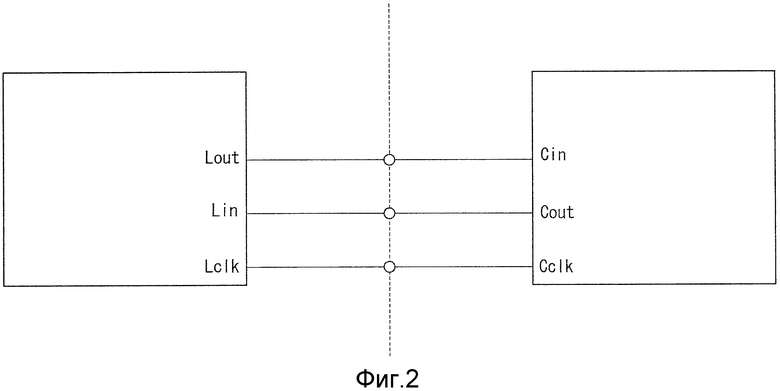
Фиг.2 иллюстрирует контактный блок между камерой и сменным объективом.
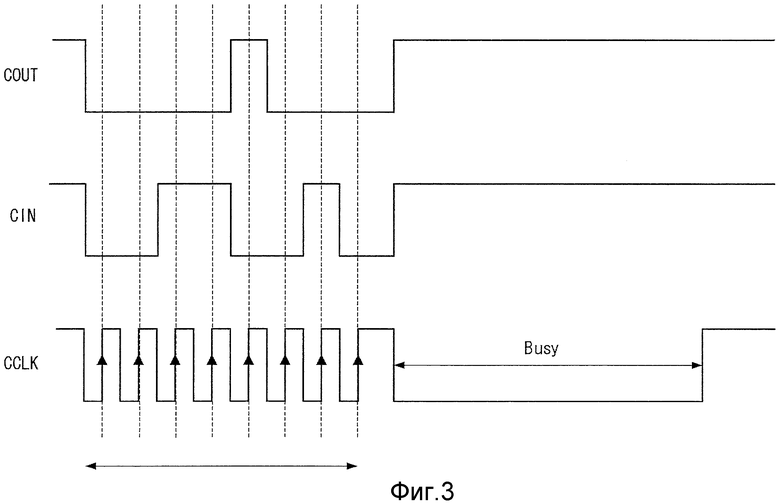
Фиг.3 иллюстрирует форму сигналов связи при связи в состоянии занятости.
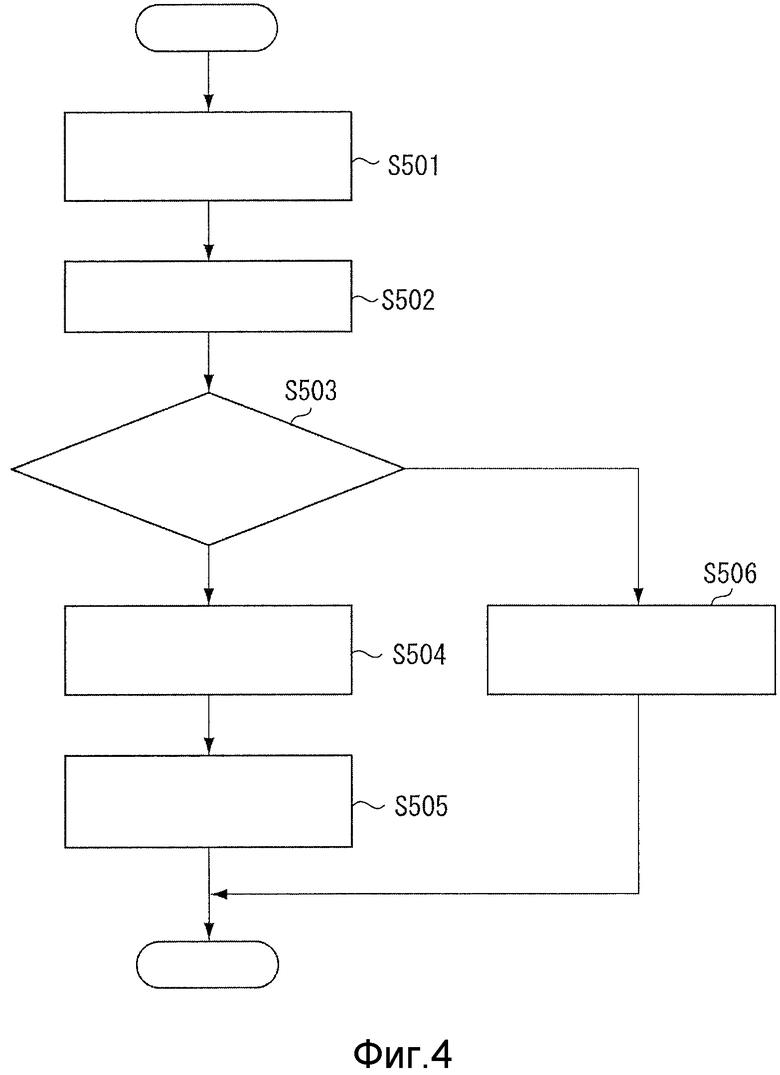
Фиг.4 является блок схемой последовательности операций способа, иллюстрирующей установление связи.
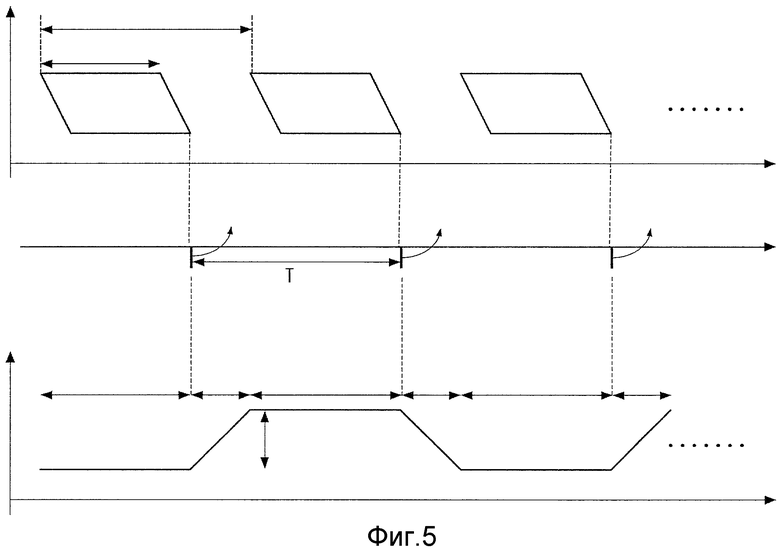
Фиг.5 иллюстрирует привязку по времени для осуществления связи при выполнении режима с рыскающими движениями.
Фиг.6 иллюстрирует форму сигналов связи при выполнении режима с рыскающими движениями.
Осуществление изобретения
Ниже будут более подробно описаны различные примерные варианты осуществления, признаки и аспекты изобретения со ссылкой на чертежи.
Далее будет описан первый примерный вариант осуществления. В настоящем примерном варианте осуществления в качестве примера будет описана камера, допускающая фотографирование с предварительным просмотром в реальном времени, а также имеющая возможность смены объектива.
Далее будет описана система конфигурации камеры и объектива. На Фиг.1 показана блок-схема сменного объектива 1, служащего в качестве вспомогательного устройства, и корпус 9 камеры. Сменный объектив 1 съемным образом прикрепляется к корпусу 9 камеры. Фокусирующая линза 2, служащая в качестве оптического элемента, перемещается в направлении оптической оси таким образом, что объект может быть сфокусирован. Блок 3 двигателя фокусировки включает в себя двигатель фокусировки для перемещения фокусирующей линзы 2 и множество зубчатых передач, служащих в качестве механизма уменьшения его скорости. Схема 4 привода фокусировки приводит в действие двигатель фокусировки в блоке 3 двигателя фокусировки.
Диафрагма 18 корректирует количество света, падающего на датчик 10 изображения. Блок 19 двигателя диафрагмы включает в себя двигатель для приведения в действие диафрагмы 18 и множество зубчатых передач, служащих в качестве механизма уменьшения скорости двигателя диафрагмы. Схема 20 привода диафрагмы приводит в действие блок 19 двигателя диафрагмы. Микрокомпьютер 5 объектива, который управляет сменным объективом 1, включает в себя блок последовательной связи для осуществления связи с корпусом 9 камеры, функциональность таймера, функциональность цифро-аналогового преобразования (ЦАП), порт ввода/вывода, функциональность памяти, например, постоянное запоминающее устройство (ПЗУ) или оперативное запоминающее устройство (ОЗУ). Блок 6 детектирования величины перемещения включает в себя небольшой диск, который вращается синхронно с вращением двигателя фокусирования, а также элемент-фотопрерыватель, и детектирует количество оборотов двигателя фокусирования. Диск имеет отметки по существу с равным шагом по его окружности.
Микрокомпьютер 5 объектива управляет двигателем фокусировки на основе результата детектирования от блока 6 детектирования величины перемещения. Микрокомпьютер 5 объектива измеряет временной интервал для каждого периода сигнала от элемента-фотопрерывателя и детектирует скорость двигателя фокусировки и скорость фокусирующей линзы 2.
Блок 7 детектирования местоположения детектирует, в каком местоположении, начиная от самого ближнего расстояния до самого дальнего расстояния, находится фокусирующая линза 2.
Ниже будет описана конфигурация корпуса 9 камеры. Микрокомпьютер 11 камеры, который управляет работой в корпусе 9 камеры, включает в себя блок последовательной связи для осуществления связи с микрокомпьютером 5 объектива, функциональность таймера, функциональность ЦАП, порт ввода-вывода, функциональность памяти, например ПЗУ и ОЗУ. Датчик 10 изображения включает в себя датчик на основе комплементарной структуры металл-оксид-полупроводник (КМОП) для того, чтобы фотоэлектрическим способом преобразовывать в сигнал свет, который прошел через объектив, служащий в качестве оптической системы. Усилитель 12 электрическим способом усиливает сигнал после фотоэлектрического преобразования датчиком 10 изображения. Схема 14 обработки сигнала камеры подвергает выходной сигнал от усилителя 12 различным типам обработки изображения для генерирования видеосигнала.
Схема 14 обработки сигнала камеры генерирует сигнал вертикальной синхронизации, который синхронизирован по времени с экспонированием датчика 10 изображения, и выводит сгенерированный сигнал вертикальной синхронизации к микрокомпьютеру 11 камеры. Дисплейное устройство 15 включает в себя жидкокристаллический дисплей (LCD) и отображает видеосигнал от схемы 14 обработки сигнала камеры. Схема 13 обработки оценочного значения АФ генерирует оценочное значение АФ для оценки фокусировки от выходного сигнала усилителя 12. Схема 13 обработки оценочного значения АФ включает в себя схему стробирования и фильтр для отбора только предварительно заданного участка сигнала для генерирования оценочного значения АФ. Микрокомпьютер 11 камеры осуществляет корректировку фокусировки и управляет временем экспонирования датчика 10 изображения на основе выходного сигнала схемы 13 обработки оценочного значения АФ.
Спусковой переключатель 16 является переключателем пользователя на корпусе 9 камеры, выдающим команду камере по фокусировке или съемке. Спусковой переключатель 16 сконфигурирован в двух вариантах выдачи команд - для фокусировки камеры полунажатием (SW1) и для съемки полным нажатием (SW2). Переключатель 17 смены режима (блок выбора) является переключателем на корпусе камеры 9 для выбора в качестве режима захвата изображения либо режима захвата неподвижного изображения, либо режима захвата движущегося изображения.
Контактный блок 8 используется для осуществления связи между микрокомпьютером камеры 11 и микрокомпьютером 5 объектива. Контактный блок 8 включает в себя множество металлических выступов на стороне корпуса 9 камеры и включает в себя множество металлических деталей, углубленных в нем для того, чтобы соприкасаться с выступами на стороне сменного объектива 1. Когда сменный объектив 1 монтируется на корпусе 9 камеры, микрокомпьютер 11 камеры и микрокомпьютер 5 объектива электрически соединяются для осуществления связи друг с другом.
На Фиг. 2 схематично проиллюстрирован контактный блок между корпусом 9 камеры и сменным объективом 1. На Фиг. 2 проиллюстрированы терминалы связи микрокомпьютера 5 объектива на ее левой стороне и терминалы связи микрокомпьютера 11 камеры на ее правой стороне. Контактный блок 8, проиллюстрированный на Фиг. 1, соединяет микрокомпьютер 11 камеры и микрокомпьютер 5 объектива. В микрокомпьютере 5 объектива, терминал связи Lout является терминалом вывода данных от микрокомпьютера 5 объектива при связи с синхроимпульсами, терминал связи Lin является терминалом ввода данных от микрокомпьютера 11 камеры при связи с синхроимпульсами, а терминал связи Lclk является терминалом ввода/вывода сигналов-синхроимпульсов при связи с синхроимпульсами.
С другой стороны, в микрокомпьютере 11 камеры терминал связи Cin является терминалом входа данных от микрокомпьютера 5 объектива при связи с синхроимпульсами, терминал связи Cout является терминалом вывода данных от микрокомпьютера 11 камеры при связи с синхроимпульсами, а терминал связи Cclk является терминалом ввода/вывода сигналов-синхроимпульсов при связи с синхроимпульсами. Признаком связи с синхроимпульсами является по существу синхронная связь, использующая генератор синхроимпульсов таким образом, что частота синхроимпульсов может быть относительно увеличена. В настоящем примерном варианте осуществления выполняется описание случая, где используется система связи, применяющая только синхронизацию с синхроимпульсами.
Далее будет описано осуществление связи во время режима с рыскающими движениями. Ниже будет описана система связи между камерой и сменным объективом 1, которая является объектом настоящего изобретения. В настоящем примерном варианте осуществления предполагается случай, в котором захватывается неподвижное изображение или случай, в котором захватывается движущееся изображение, в то время как дисплейное устройство 15 выполняет предварительное отображение.
На Фиг. 5 проиллюстрирована привязка по времени для осуществления связи, когда фокусирующая линза 2 выполняет режим с рыскающими движениями, и привязка по времени к приводу фокусирующей линзы 2. Микрокомпьютер 11 камеры начинает осуществление связи для передачи данных, относящихся к управлению приводом фокусирующей линзы, к микрокомпьютеру 5 объектива незамедлительно после окончания экспонирования датчика 10 изображения. В настоящем примерном варианте осуществления передаются 64-байтовые данные с фиксированной длиной. Примером данных, которые должны быть переданы, является значение, представляющее команду связи, которое сохраняется в первом байте данных. Период привода сохраняется во втором байте данных. Микрокомпьютеру 5 объектива требуется закончить осуществление рыскающего движения в период, представленный информацией, относящейся к периоду привода. Соответственно период привода фокусирующей линзы 2 на Фиг. 5 определяется согласно контенту связи.
Различные типы информации, относящиеся к приводу фокусирующей линзы и приводу диаграммы, включаются, начиная с третьего байта и заканчивая 62-м байтом данных. Информация переключения для переключения между режимом захвата неподвижного изображения и режимом захвата движущегося изображения сохраняется в 63-м байте данных. Контрольная сумма для детектирования ошибки сохраняется в 64-м байте данных. Микрокомпьютер 5 объектива двигает, когда он принимает данные, фокусирующую линзу 2 на расстояние привода рыскающего движения в одном направлении в пределах периода привода до остановки. Данные, которые должны быть приняты от микрокомпьютера 11 камеры, включают в себя информацию, относящуюся к периоду привода фокусирующей линзы, как описано выше.
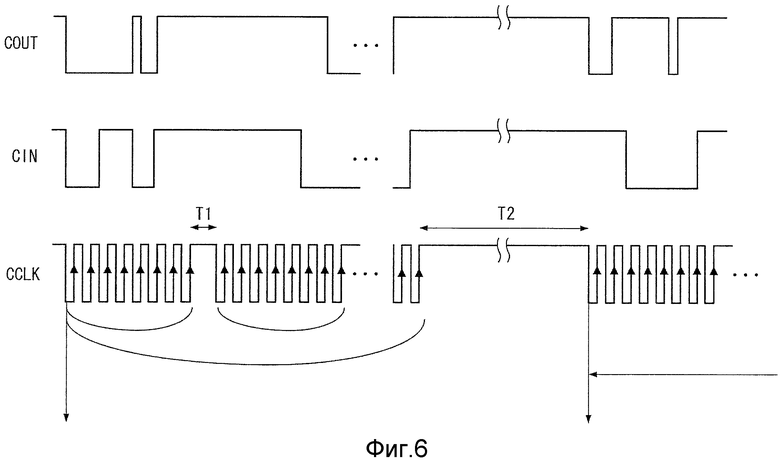
Механизм для синхронизации передачи, отправленной в конце экспонирования микрокомпьютером 11 камеры, с приводом рыскающего движения будет описан со ссылкой на Фиг.6. Фиг.6 является схемой форм сигналов, иллюстрирующей сигналы в терминалах связи Cout, Cin и Cclk.
Схема 14 обработки сигнала камеры генерирует сигнал вертикальной синхронизации, который синхронизирован с привязкой по времени экспонирования датчика 10 изображения и выводит сгенерированный сигнал вертикальной синхронизации к микрокомпьютеру 11 камеры. Микрокомпьютер 11 камеры выводит сигнал синхронизации от терминала связи Cclk на основе сигнала вертикальной синхронизации. Каждый раз, когда экспонирование датчика 10 изображения завершается, выполняется передача от микрокомпьютера 11 камеры к микрокомпьютеру 5 объектива. Микрокомпьютер 5 объектива принимает данные от микрокомпьютера 11 камеры во внутренний регистр, когда уровень сигнала у терминала связи Cclk, служащего в качестве терминала ввода/вывода синхроимпульсов, изменяется с низкого уровня (Lo) к высокому уровню (Hi).
Такое изменение повторяется всего восемь раз (согласно восьми битам) таким образом, что микрокомпьютер 11 камеры и микрокомпьютер 5 объектива сохраняют данные, соответствующие восьми битам в качестве 1-байтовых данных и используют данные для внутренней обработки. Дополнительно, изменение повторяется таким образом, что микрокомпьютер 11 камеры и микрокомпьютер 5 объектива осуществляют непрерывную связь по передаче всех 64-х байтов данных.
Когда это осуществление непрерывной связи заканчивается, микрокомпьютер 11 камеры сохраняет уровень сигнала Hi в терминале связи Cclk и понижает уровень сигнала с Hi к Lo в терминале связи Cclk, когда передача начинается снова с последующей привязкой по времени к концу экспонирования. Микрокомпьютер 5 объектива отслеживает уровень сигнала в терминале связи Cclk (Lclk) и рассматривает привязку по времени, при которой уровень сигнала в терминале связи Cclk (Lclk) понижается с Hi к Lo после истечения предварительно заданного времени T, с момента как уровень сигнала в терминале связи Cclk (Lclk) достиг Hi в качестве синхронизированной привязки по времени к экспонированию камеры. Микрокомпьютер 5 объектива управляет действиями по приводу и остановке фокусирующей линзы 2 на основе синхронизированной привязки по времени и данных, относящихся к периоду привода, которые были приняты от микрокомпьютера 11 камеры. Когда уровень сигнала в терминале связи Cclk (Lclk) затем переключается с Lo в Hi, микрокомпьютер 5 объектива принимает данные, которые микрокомпьютер 11 камеры отправил через терминал связи Cout, во внутренний регистр и выполняет непрерывное осуществление связи по передаче данных общей длиной 64 байт, подобно предыдущей связи.
Предварительно заданное время T является временем более длинным, чем время Т1, в течение которого уровень сигнала в терминале связи Cclk достигает Hi между передачей, соответствующей одному байту, и передачей, соответствующей последующему одному байту во время непрерывной передачи 64-х байтов. Т2 является временем, истекшим после завершения непрерывной передачи, пока не начнется последующая непрерывная передача. Предварительно заданное время T определяется как более короткое, чем время Т2. Более точно, T1<T<T2. Хотя в настоящем варианте осуществления фокусирующая линза 2 останавливается от начала до конца экспонирования кадра, настоящее изобретение не ограничено этим. Фокусирующая линза 2 может быть остановлена в соответствии с привязкой по времени запроса оценочного значения АФ.
Далее будет описано установление связи, выполняемое, когда монтируется сменный объектив 1. Ниже будет описан установочный процесс, выполняемый, когда сменный объектив 1 монтируется на камеру согласно настоящему изобретению. Фиг.4 является блок-схемой последовательности операций способа, иллюстрирующей установочный процесс, относящийся к осуществлению связи системы камеры, включающий камеру согласно настоящему примерному варианту осуществления и сменный объектив 1.
Когда сменный объектив 1 монтируется на камеру, обработка переходит к этапу S501. На этапе S501 выполняется установление связи в состоянии занятости между микрокомпьютером 11 камеры микрокомпьютером 5 объектива.
Далее будет описано осуществление связи в состоянии занятости. Фиг.3 - схема форм сигналов, иллюстрирующая сигналы у терминалов связи Cout, Cin в Cclk при осуществлении связи в состоянии занятости.
Микрокомпьютер 11 камеры отправляет данные к микрокомпьютеру 5 объектива через терминал связи Cout синхронно с появлением сигнала синхронизации от терминала связи Cclk. В дополнение, микрокомпьютер 11 камеры принимает данные от микрокомпьютера 5 объектива через терминал связи Cin синхронно с появлением сигнала синхронизации от терминала связи Cclk.
Фиг.3, на которой уровень сигнала в терминале связи Cclk является Lo для предварительно заданного времени, отображает состояние занятости, в котором микрокомпьютер 5 объектива понижает уровень сигнала в терминале связи Lclk в Lo для того, чтобы не допустить осуществление связи. В состоянии занятости микрокомпьютер 5 объектива анализирует данные, принятые от микрокомпьютера 11 камеры, и выполняет обработку, соответствующую проанализированным данным. Когда обработка передачи заканчивается, микрокомпьютер объектива 5 выполняет обработку по возвращению уровня сигнала в терминале связи Lclk в Hi. В настоящем примерном варианте осуществления при осуществлении связи в состоянии занятости микрокомпьютер 5 объектива выдает состояние занятости каждый раз, когда выполняет передачу 1-ого байта.
На этапе S502 при установлении связи микрокомпьютер 11 камеры запрашивает идентификацию объектива (ID) от микрокомпьютера 5 объектива.
На этапе S503 микрокомпьютер 11 камеры определяет, совместим ли с новой системой связи монтируемый съемный объектив 1, посредством ID объектива, запрошенного на этапе S502. Если монтируемый сменный объектив 1 совместим с новой системой связи («Да» на этапе S503), обработка продолжается этапом S504. Если монтируемый сменный объектив 1 не совместим с новой системой связи («Нет» на этапе S503), обработка продолжается этапом S506. Новая система связи является системой связи, которая обрабатывает изменение в уровне сигнала в терминале связи Cclk после истечения предварительно заданного периода времени в качестве привязки по времени синхронно с экспонированием кадра, как описано выше.
На этапе S504, если монтируемый сменный объектив 1 совместим с новой системой связи («Да» на этапе S503), микрокомпьютер 11 камеры уведомляет микрокомпьютер 5 объектива о переключении связи. Затем обработка продолжается этапом S505. На этапе S505 микрокомпьютер 11 камеры начинает непрерывную передачу 64-ых байт. С другой стороны, если монтируемый сменный объектив 1 не совместим с новой системой связи («Нет» на этапе S503) обработка продолжается этапом S506. На этапе S506 микрокомпьютер 11 камеры продолжает передачу в состоянии занятости.
Как описано выше, согласно настоящему изобретению, передача для уведомления о привязке по времени к экспонированию датчика 10 изображения от микрокомпьютера 11 камеры к микрокомпьютеру 5 объектива может быть выполнена, не увеличивая количество контактов.
Хотя микрокомпьютер 11 камеры уведомляет микрокомпьютер 5 объектива о синхронизирующей привязке по времени к началу непрерывной передачи каждый раз, когда заканчивается экспонирование датчика 10 изображения в настоящем варианте осуществления, уведомление о синхронизирующей привязке по времени не ограничено привязкой, выполняемой, когда заканчивается экспонирование датчика 10 изображения. Микрокомпьютер камеры 11 может уведомить микрокомпьютер 5 объектива о синхронизирующей привязке по времени к синхронизации с экспонированием датчика 10 изображения, например, когда начинается экспонирование датчика 10 изображения.
Хотя система связи переключается непосредственно после того, как микрокомпьютер 11 камеры определяет, что смонтированный сменный объектив 1 совместим с новой системой связи при установлении связи в настоящем примерном варианте осуществления, настоящее изобретение не ограничено этим. Только, например, когда микрокомпьютер 5 объектива уведомит микрокомпьютер 11 камеры об ID, который указывает, что связь в настоящее время осуществляется с новой системой связи, в дополнение к ID, который указывает, что смонтированный сменный объектив 1 совместим с новой системой связи, микрокомпьютер 11 камеры может переключить систему связи. Микрокомпьютер 11 камеры может быть уведомлен об ID, указывающим, что связь в настоящий момент осуществляется с новой системой связи, когда большой объем данных, например, информация аберрации, относящаяся к линзам, отправляется к микрокомпьютеру 11 камеры от микрокомпьютера 5 объектива.
Хотя в настоящем примерном варианте осуществления описан случай, в котором осуществляется управление приводом фокусирующей линзы, служащей в качестве оптического элемента, настоящее изобретение не ограничено этим. Настоящее изобретение применимо для привода нейтрального (ND) светофильтра, уменьшающего количество света, попадающего на линзы, и инфракрасного режекторного фильтра.
Далее будет описан второй примерный вариант осуществления. Хотя микрокомпьютер 5 объектива отслеживает уровень сигнала в терминале связи Cclk (Lclk) и учитывает привязку по времени, при которой уровень сигнала в терминале связи Cclk (Lclk) первый раз понижается с Hi к Lo по истечению предварительно заданного времени, после того как уровень сигнала в терминале связи Cclk (Lclk) достиг Hi, в качестве синхронизирующей привязки по времени, настоящее изобретение не ограничено этим. В качестве синхронизирующей привязки по времени может быть принята во внимание привязка по времени, при которой микрокомпьютер 11 камеры выводит предварительно заданный сигнал от терминала связи Cclk при синхронизации с экспонированием после истечения предварительно заданного времени с момента завершения непрерывной передачи, и микрокомпьютер 5 объектива детектирует сигнал. Например, синхронизирующей привязкой по времени может являться привязка по времени, при которой уровень сигнала в терминале связи Cclk (Lclk) непрерывно изменялся между Hi и Lo предварительно заданное количество раз после истечения предварительно заданного времени, с момента когда уровень сигнала достиг Hi. Таким образом, для микрокомпьютера 5 объектива может быть предотвращено ошибочное детектирование в качестве синхронизирующей привязки по времени привязки по времени, при которой уровень сигнала в терминале связи Cclk меняется по причине шума или чего-то подобного.
Хотя настоящее изобретение было описано со ссылкой к примерным вариантам осуществления, должно быть понятным, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем последующей формулы изобретения подлежит расширенному толкованию с тем, чтобы охватывать все модификации, эквивалентные структуры и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ФОТОАППАРАТ | 2009 |
|
RU2510866C2 |
| ЦИФРОВОЙ ФОТОАППАРАТ | 2006 |
|
RU2384968C1 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЙ И АКСЕССУАРЫ | 2018 |
|
RU2716855C2 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ И АКСЕССУАРЫ | 2018 |
|
RU2714847C2 |
| УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ И АКСЕССУАРЫ | 2018 |
|
RU2714842C2 |
| АКСЕССУАР ДЛЯ КАМЕРЫ И КАМЕРА | 2013 |
|
RU2556296C2 |
| УСТРОЙСТВО СЪЕМКИ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2574325C2 |
| УСТРОЙСТВО РЕГУЛИРОВКИ ФОКУСА, УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И ОБЪЕКТИВ | 2012 |
|
RU2650435C2 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
| УСТРОЙСТВО РЕГУЛИРОВКИ ФОКУСА, УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И ОБЪЕКТИВ | 2012 |
|
RU2756433C2 |
Настоящее изобретение относится к устройству формирования изображения, на которое может быть смонтировано вспомогательное устройство, и которое может осуществлять связь со вспомогательным устройством, а также относится к вспомогательному устройству, которое может быть смонтировано на устройство формирования изображения. Заявленная группа изобретений включает систему, содержащую устройство формирования изображения, вспомогательное устройство, которое съемным образом прикрепляется к устройству формирования изображения, а также способ управления вспомогательным устройством и способ управления устройством формирования изображения, к которому съемным образом прикрепляется вспомогательное средство, причем упомянутое устройство формирования изображения включает в себя первый терминал для отправки сигнала синхронизации к вспомогательному устройству и второй терминал для обмена данными со вспомогательным устройством на основе сигнала синхронизации, при этом средство управления выполнено с возможностью контролировать уровень сигнала в первом терминале на предварительно заданном уровне, когда осуществление связи для передачи данных завершается, и выполнено с возможностью затем изменять уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации, а средство управления на стороне вспомогательного устройства выполнено с возможностью управлять приводом оптического элемента на основе привязки по времени, при которой уровень сигнала у первого терминала на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется у предварительно заданного уровня. Технический результат, достигаемый от реализации заявленной группы изобретений заключается в обеспечении возможности уведомления объектива о привязки по времени экспонирования датчика изображения без необходимости выделения контакта для передачи сигнала, который синхронизирован с экспонированием датчика изображения. 5 н. и 10 з.п. ф-лы, 6 ил.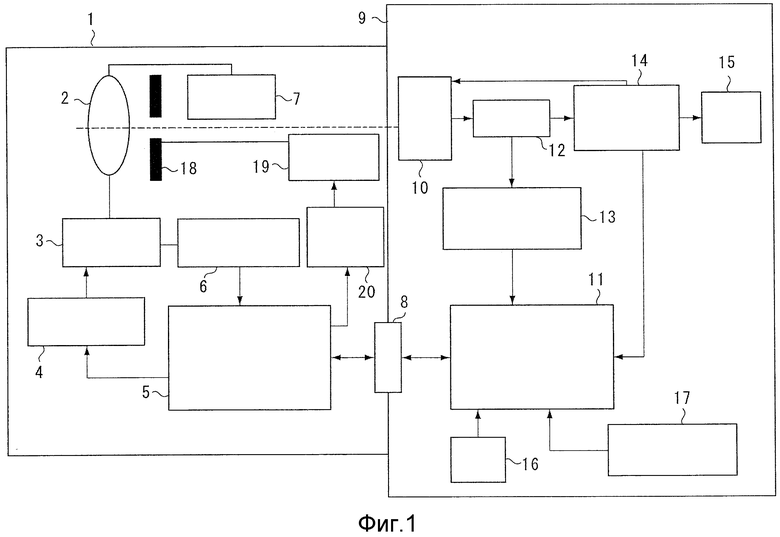
1. Устройство формирования изображения, на которое съемным образом прикрепляется оптическое вспомогательное устройство, при этом устройство формирования изображения содержит:
средство формирования изображения для преобразования изображения объекта в электрический сигнал для получения сигнала формирования изображения;
средство генерации сигнала для генерации сигнала вертикальной синхронизации, который синхронизирован с привязкой по времени экспонирования средства формирования изображения для получения сигнала формирования изображения, и вывода сгенерированного сигнала вертикальной синхронизации;
средство управления для управления обменом данными с оптическим вспомогательным устройством на основе сигнала вертикальной синхронизации;
первый терминал для отправки сигнала синхронизации, сгенерированного средством управления, к оптическому вспомогательному устройству; и второй терминал для обмена данными с оптическим вспомогательным устройством на основе сигнала синхронизации, отличающееся тем, что средство управления выполнено с возможностью контролировать уровень сигнала в первом терминале на предварительно заданном уровне, когда обмен данными завершается, и выполнено с возможностью затем изменять уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации.
2. Устройство формирования изображения по п.1, в котором средство управления выполнено с возможностью контролировать уровень сигнала в первом терминале на предварительно заданном уровне, когда обмен данными завершается, и выполнено с возможностью затем начинать выводить сигнал синхронизации при синхронизации с выводом сигнала вертикальной синхронизации.
3. Устройство формирования изображения по п.1 или 2, в котором средство управления выполнено с возможностью передавать данные, относящиеся к привязке по времени приведения в действие оптического элемента, к оптическому вспомогательному устройству через второй терминал.
4. Устройство формирования изображения по п.3, в котором средство управления выполнено с возможностью управлять привязкой по времени приведения в действие оптического элемента таким образом, что оптический элемент останавливается во время экспонирования средства формирования изображения.
5. Устройство формирования изображения по п.3, в котором средство управления выполнено с возможностью, когда монтируется оптическое вспомогательное устройство, допускающее управление приведением в действие оптического элемента на основе изменения уровня сигнала при выводе сигнала от первого терминала, контролировать уровень сигнала в первом терминале на предварительно заданном уровне, если обмен данными заканчивается, и выполнено с возможностью затем изменять уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации.
6. Устройство формирования изображения по п.3, в котором оптический элемент является, по меньшей мере, одним из фокусирующей линзы, диафрагмы и нейтрального светофильтра.
7. Оптическое вспомогательное устройство, которое съемным образом прикрепляется к устройству формирования изображения, при этом оптическое вспомогательное устройство содержит:
оптический элемент;
первый терминал на стороне вспомогательного устройства для приема сигнала синхронизации от устройства формирования изображения;
второй терминал на стороне вспомогательного устройства для обмена данными с устройством формирования изображения на основе сигнала синхронизации; и
средство управления на стороне вспомогательного устройства для управления приведением в действие оптического элемента на основе данных, принятых от устройства формирования изображения, отличающееся тем, что средство управления на стороне вспомогательного устройства выполнено с возможностью управлять приведением в действие оптического элемента на основе привязки по времени, при которой уровень сигнала в первом терминале на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохранялся на предварительно заданном уровне.
8. Оптическое вспомогательное устройство по п.7, в котором средство управления на стороне вспомогательного устройства выполнено с возможностью, когда уровень сигнала в первом терминале на стороне вспомогательного устройства изменяется до истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется на предварительно заданном уровне, ограничивать приведение в действие оптического элемента на основе привязки по времени к этому изменению.
9. Оптическое вспомогательное устройство по п.7 или 8, в котором средство управления на стороне вспомогательного устройства выполнено с возможностью принимать данные, относящиеся к привязке по времени приведения в действие оптического элемента через второй терминал на стороне вспомогательного средства, и управлять приведением в действие оптического элемента на основе данных, относящихся к привязке по времени приведения в действие и привязке по времени, при которой уровень сигнала в первом терминале на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется на предварительно заданном уровне.
10. Оптическое вспомогательное устройство по п.7 или 8, в котором привязка по времени, при которой уровень сигнала в первом терминале на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется на предварительно заданном уровне, синхронизируется с привязкой по времени экспонирования средства формирования изображения.
11. Оптическое вспомогательное устройство по п.7 или 8, в котором средство управления на стороне вспомогательного устройства выполнено с возможностью останавливать оптический элемент во время экспонирования средства формирования изображения устройства формирования изображения.
12. Оптическое вспомогательное устройство по п.7 или 8, в котором оптический элемент является, по меньшей мере, одним из фокусирующей линзы, диафрагмы и нейтрального светофильтра.
13. Способ управления устройством формирования изображения, к которому съемным образом прикрепляется оптическое вспомогательное устройство, причем упомянутое устройство формирования изображения включает в себя первый терминал для отправки сигнала синхронизации к оптическому вспомогательному устройству и второй терминал для обмена данными с оптическим вспомогательным устройством на основе сигнала синхронизации, при этом способ управления содержит:
этап формирования изображения, заключающийся в преобразовании изображения объекта в электрический сигнал для получения сигнала формирования изображения;
этап генерации сигнала, заключающийся в генерации сигнала вертикальной синхронизации, который синхронизирован с привязкой по времени экспонирования для получения сигнала формирования изображения на этапе формирования изображения, и выводе сгенерированного сигнала вертикальной синхронизации;
этап управления, заключающийся в управлении обменом данными с оптическим вспомогательным устройством на основе сигнала вертикальной синхронизации;
причем на этапе управления контролируют уровень сигнала в первом терминале на предопределенном уровне, когда обмен данными завершается, и затем изменяют уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации.
14. Способ управления оптическим вспомогательным устройством, которое съемным образом прикрепляется к устройству формирования изображения, причем упомянутое оптическое вспомогательное устройство включает в себя оптический элемент, первый терминал на стороне вспомогательного устройства для приема сигнала синхронизации от устройства формирования изображения и второй терминал на стороне вспомогательного устройства для обмена данными с устройством формирования изображения на основе сигнала синхронизации, при этом способ управления содержит:
этап управления, заключающийся в управлении приведением в действие оптического элемента на основе данных, принятых от устройства формирования изображения;
причем на этапе управления управляют приведением в действие оптического элемента на основе привязки по времени, при которой уровень сигнала в первом терминале на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется на предварительно заданном уровне.
15. Система уведомления устройства формирования изображения о привязке по времени экспонирования средства формирования изображения в устройстве формирования изображения без необходимости выделения терминала для передачи сигнала, соответствующего привязке по времени экспонирования средства формирования изображения, к оптическому вспомогательному устройству, которое съемным образом прикрепляется к устройству формирования изображения, причем устройство формирования изображения содержит:
средство формирования изображения для преобразования изображения объекта в электрический сигнал для получения сигнала формирования изображения;
средство генерации сигнала для генерации сигнала вертикальной синхронизации, который синхронизирован с привязкой по времени экспонирования средства формирования изображения для получения сигнала формирования изображения, и вывода сгенерированного сигнала вертикальной синхронизации;
средство управления для управления обменом данными с оптическим вспомогательным устройством на основе сигнала вертикальной синхронизации;
первый терминал для отправки сигнала синхронизации, сгенерированного средством управления, к оптическому вспомогательному устройству; и
второй терминал для обмена данными с оптическим вспомогательным устройством на основе сигнала синхронизации,
причем оптическое вспомогательное устройство содержит оптический элемент;
первый терминал на стороне вспомогательного устройства для приема сигнала синхронизации от средства управления через первый терминал;
второй терминал на стороне вспомогательного устройства для обмена данными со средством управления на основе сигнала синхронизации через второй терминал; и
средство управления на стороне вспомогательного устройства, выполненное с возможностью управлять приведением в действие оптического элемента на основе данных, принятых от средства управления,
при этом средство управления выполнено с возможностью контролировать уровень сигнала в первом терминале на предварительно заданном уровне,
когда обмен данными завершается, и выполнено с возможностью затем изменять уровень сигнала при синхронизации с выводом сигнала вертикальной синхронизации; и
при этом средство управления на стороне вспомогательного устройства выполнено с возможностью управлять приведением в действие оптического элемента на основе привязки по времени, при которой уровень сигнала у первого терминала на стороне вспомогательного устройства изменяется после истечения предварительно заданного времени, в течение которого уровень сигнала сохраняется у предварительно заданного уровня.
| US 6374033 В2, 16.04.2002 | |||
| US 6710781 B1, 23.03.2004 | |||
| JP 2009258558 A, 05.11.2009. |

